Embed Size (px)
Citation preview

Chen Cai, Benjamin Heydecker
Presentation for the 4th CREST Open Workshop
Operation Research for Software Engineering Methods, London, 2010
Approximate Dynamic Programming Approximate Dynamic Programming & Adaptive Traffic Control& Adaptive Traffic Control
Contents
• Dynamic Programming• Curse of Dimensionality• Approximate Dynamic Programming• Adaptive Traffic Signal Control

1. Dynamic Programming

1. Dynamic Programming
• What it does?– Sequential decision-making for discrete systems– Iterative computing rather than enumeration– Global optimality
t0 t1 t2 t3 tm-2 tmtm-1
Stage 0 Stage m-1
t
F = i0,u0
∗,w0 , i1 ,u1∗,w1 ,..., im−1 ,um−1
∗ ,wm−1 , im{ }
1. Dynamic Programming
• How it does?– DP decomposes a complex problem to a group of sub-problems called stage; and by recursively
finding optimal solution at each stage, its solution converges to global optimality.– It can be mathematically interpreted as:
By recursively computing
J (it ) =Min
uEw
g it,it+1( ) +αtJ it+1 it( ){ }⎡⎣⎢
⎤⎦⎥
Minu
Ew
αtgt it,it+1( )t
∞
∑⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
for all it at stage t.

2. Curse of Dimensionality
2. Curse of Dimensionality
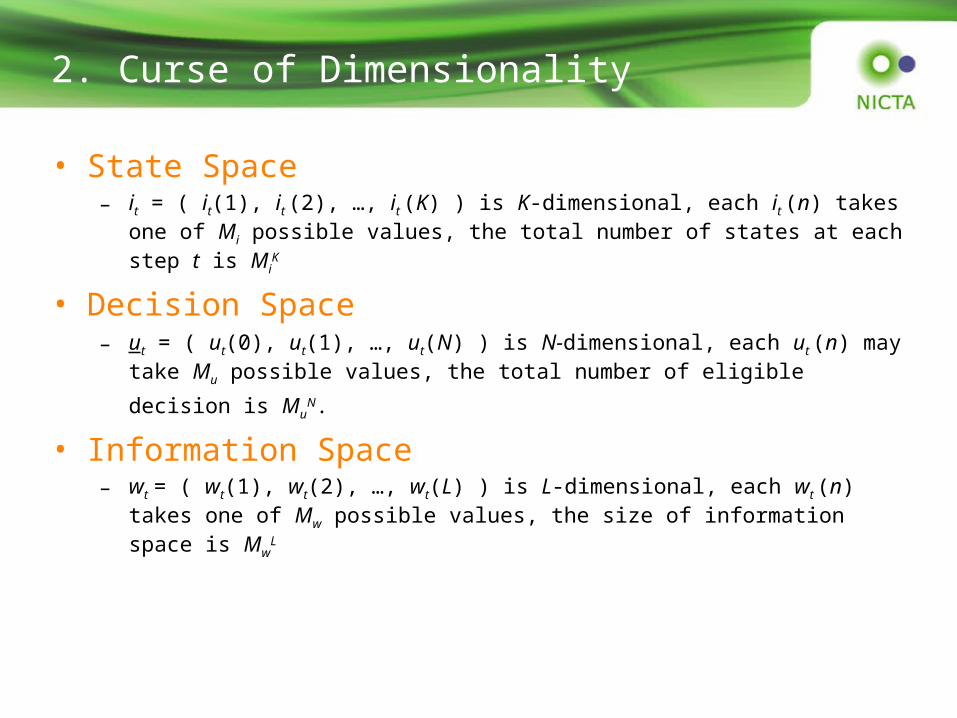
• State Space– it = ( it(1), it (2), …, it (K) ) is K-dimensional, each it (n) takes one of Mi possible values, the
total number of states at each step t is MiK
• Decision Space– ut = ( ut(0), ut(1), …, ut(N) ) is N-dimensional, each ut (n) may take Mu possible values, the
total number of eligible decision is MuN.
• Information Space– wt = ( wt(1), wt(2), …, wt(L) ) is L-dimensional, each wt (n) takes one of Mw possible values,
the size of information space is MwL

2. Curse of Dimensionality
1010 ×105 ×105 =1020
M iK ×Mw
L ×MuN
J (it ) =Min
uEw
g it,it+1( ) +αtJ it+1 it( ){ }⎡⎣⎢
⎤⎦⎥
• Three curses of dimensionality
• Computational demand is
In the case that K=10, L=5, and N=5, and MiK= Mw
L= MuN=10,
the total computational demand is
state
informationdecision

3. Approximate Dynamic Programming
3. Approximate Dynamic Programming
• What it does?– Reduce computational demand
• How it does?– Model approximation
• Models describe system dynamics. Complex system is hard to model and may be partially observable
– Policy approximation• Parameterisation that captures the relationship between
control policy and state variables– Function approximation
• Parameterisation of value function

3. Approximate Dynamic Programming
J (it ) =Min
uEw
gt it,it+1( ) +αtJ it+1( ){ }⎡⎣⎢
⎤⎦⎥
J (it ) =Min
uEw
gt it,it+1( ) +αt %J it+1,rt( ){ }⎡⎣⎢
⎤⎦⎥
( )( )
( )
1r
r k
r K
⎡ ⎤⎢ ⎥
= ⎢ ⎥⎢ ⎥⎣ ⎦
M
%J i,r( ) : X ×° K → °
J i( ) : X → °
• Parameterisation of value function
3. Approximate Dynamic Programming
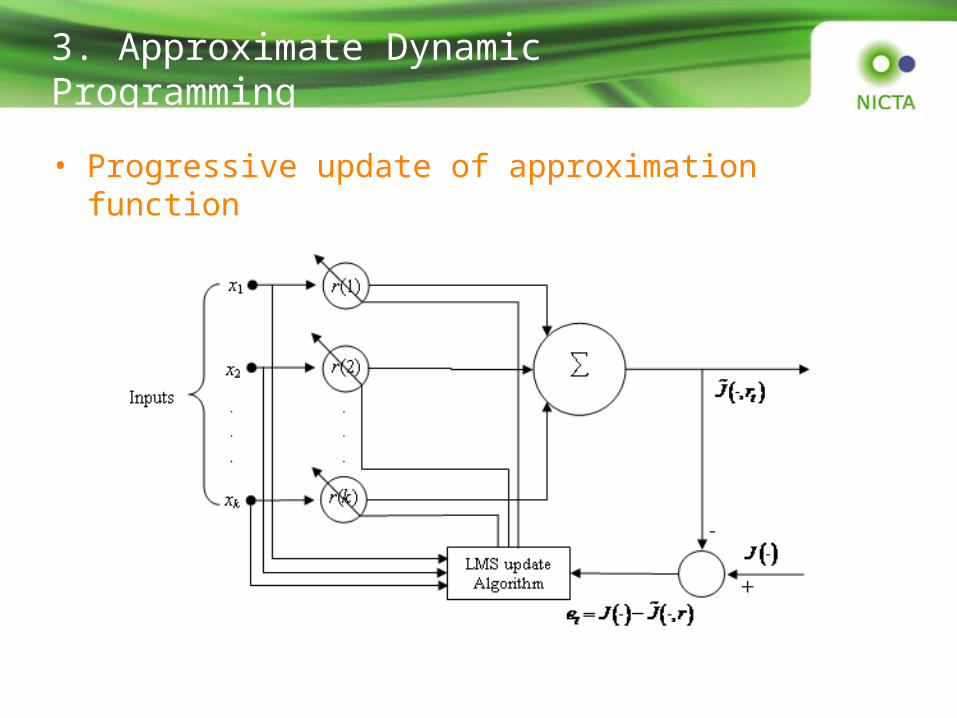
• Progressive update of approximation function

4. ADP in Adaptive Traffic Signal Control
4. Adaptive Traffic Signals
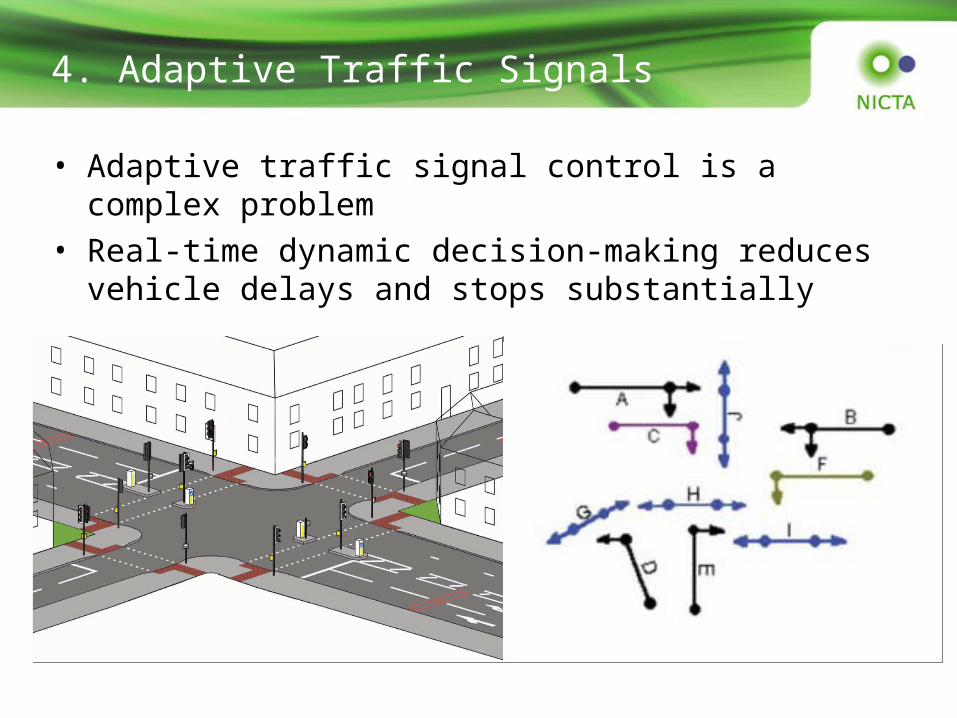
• Adaptive traffic signal control is a complex problem
• Real-time dynamic decision-making reduces vehicle delays and stops substantially
4. Adaptive Traffic Signals
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
Sensing Sensing ControlControl
Real worldReal world
4. Adaptive Traffic Signals
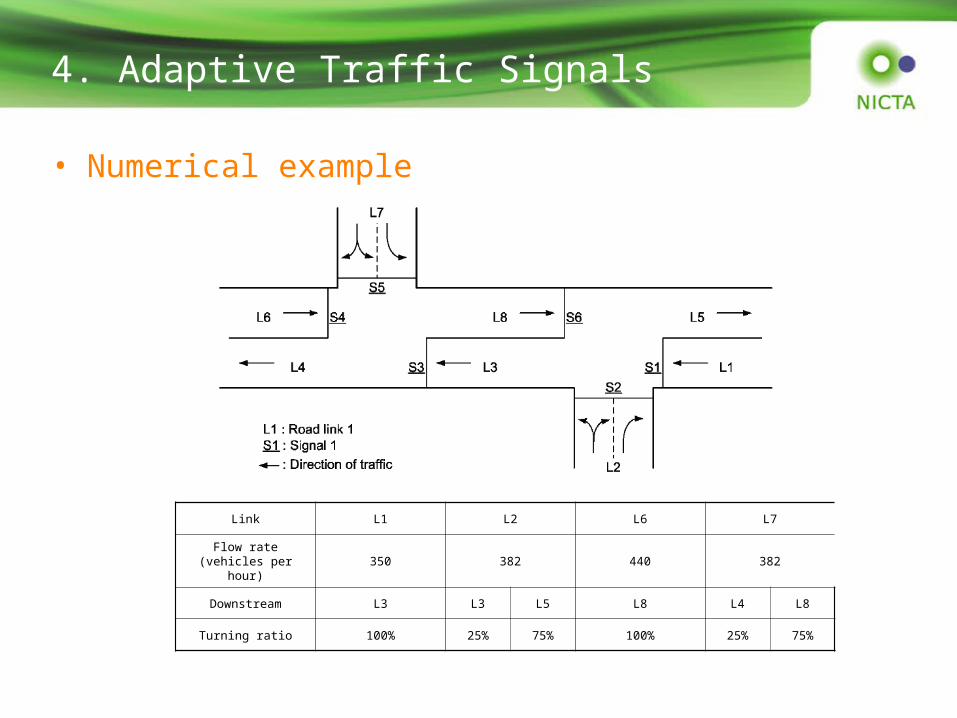
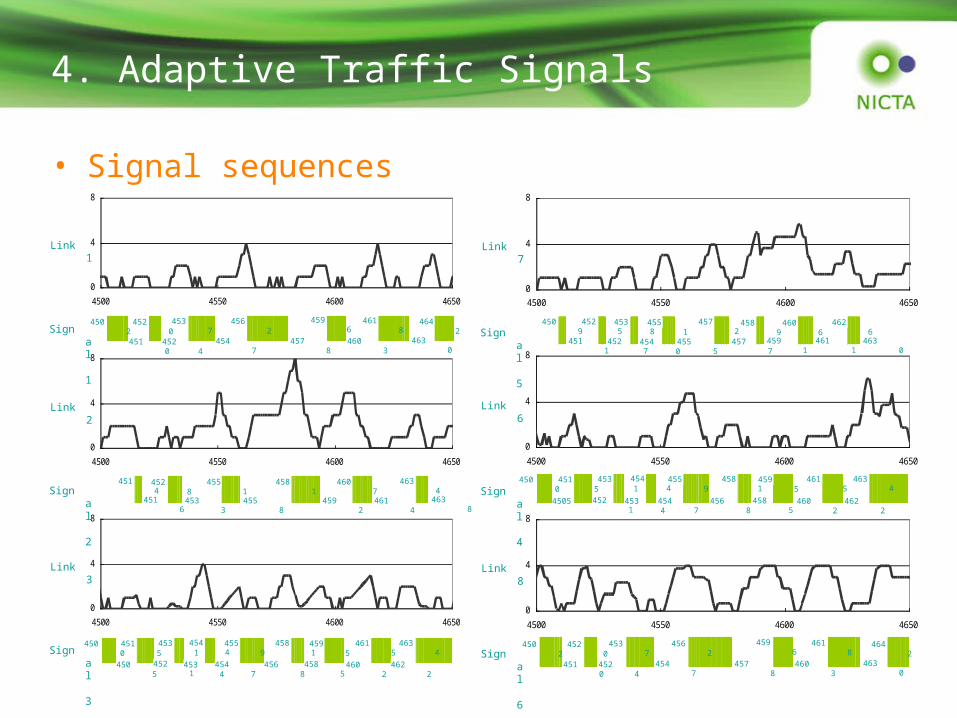
• Numerical example
Link L1 L2 L6 L7
Flow rate(vehicles per hour)
350 382 440 382
Downstream L3 L3 L5 L8 L4 L8
Turning ratio 100% 25% 75% 100% 25% 75%
4. Adaptive Traffic Signals
• Signal sequences
Link 7
Signal 5
Link 6
Signal 4
0
4
8
4500 4550 4600 4650
Link 8
Signal 6
0
4
8
4500 4550 4600 4650
0
4
8
4500 4550 4600 4650
4505
4500451
5453
1
4521
4534
4568
4559
4547
4544
4634
4622
4615
4602
4595
4585
4581
4611
4555
4551
4540
4538
4527
4525
4511
4509
4606
4591
4589
4577
4572
4630
4626
4524
4520
4510
4502
4537
4596
4578
4562
4547
4630
4618
4603
4642
0
4
8
4500 4550 4600 4650
Link 1
Signal 1
0
4
8
4500 4550 4600 4650
Link 2
Signal 2
0
4
8
4500 4550 4600 4650
Link 3
Signal 3
4630
4642
4524
4520
4510
4502
4537
4596
4578
4562
4547
4618
4603
4505
4500451
5453
1
4521
4534
4568
4559
4547
4544
4634
4622
4615
4602
4595
4585
4581
4533
4516
4528
4514
4551
4607
4592
4581
4558
4634
4614
4638

4. Adaptive Traffic Signals
• Up to 60% reduction in vehicle delays in comparison with optimised fixed-time plans
• Fully adaptive and applicable to distributed network control
• Computation demand manageable by real-time systems
5. Conclusion
• Dynamic programming is the only exact solution to sequential decision-making for discrete systems
• DP is difficult for real-time control because of computational demand
• Approximation to DP can reduce dimensionality and therefore make problem-solving tractable
• ADP is a general framework in which various approximation architectures and machine learning techniques can be used
• Adaptive traffic signal controller using ADP demonstrated promising results in reducing vehicle delays

From imagination to impact







![Home []MAIL SEZIONE serqio.provenzale@tiscali.it pimarocco@alice.it qior.ferrero@tiscali.it stella.1965@tiscali.it Cai Alba Cai Alba Cai Alba carlino.belloni@fastwebnet.it Cai Alba](https://img.pdfslide.us/doc/110x75/608fbca2ae1d9f2c014bccb2/home-mail-sezione-serqioprovenzaletiscaliit-pimaroccoaliceit-qiorferrerotiscaliit.jpg)





















