-
7/29/2019 Che055precision tracking project4 Ieee
1/13
IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4, AUGUST
2012 593
Precision Tracking Control and Constraint Handlingof Mechatronic
Servo Systems Using Model
Predictive ControlChi-Ying Lin, Member, IEEE, and Yen-Chung
Liu
AbstractThis paper presents precision tracking control
andconstraint handling of mechatronic servo systems using
modelpredictive control. The current study revisits integral model
pre-dictive control, a common technique used in industrial
processapplications, from a motion control perspective for step
trackingand constraint handling. To improve the control performance
forperiodic signal tracking, this paper integrates an internal
model-based repetitive control law with the model predictive
controllerand transforms the original problem to a quadratic
programmingproblem to deal with the given constraints. The current
study ap-
plies the aforesaid controls to a piezoactuated system,
implementedat a 10-kHz sampling rate. This research analyzes and
discussesthe experimental results of several controller design
parametersaffecting the control performance. Asymptotic error
tracking andconstraint handling results particularly demonstrate
the effective-ness and potential of the model predictive controller
for the servodesign of fast mechatronic systems.
IndexTermsConstraint handling, mechatronic systems,
modelpredictive control (MPC), motion control, repetitive
control.
I. INTRODUCTION
A
DVANCED controls such as adaptive control or on-line-
based optimal control, are typically heavily computational
and highly processor-dependent if applying to real-time
control
applications. Their practical use is thus limited to slow
dynamic
systems in previous literatures [1]. However, due to
emerging
development of nanotechnology for fast microprocessors, up-
to-date technology has made implementing advanced controls
on fast dynamic systems a possible task. Therefore, applying
advanced control techniques to improve system performance
has become an attractive approach for control engineers. As
an optimal control approach, model predictive control (MPC)
is especially suitable for constraint handling in
multivariable
process systems and commonly seen in slow sampled-data con-
trol systems such as chemical process control and automotive
applications.
Manuscript received May 26, 2010; revised September 13, 2010
andDecember 30, 2010; accepted January 22, 2011. Date of
publication March10, 2011; date of current version May 4, 2012.
Recommended by TechnicalEditor J. Xu. This paper was supported by
the National Science Council ofTaiwan, R.O.C., under Grant NSC
97-2218-E-011-015.
C.-Y. Lin is with the Department of Mechanical Engineering,
NationalTaiwan University of Science and Technology, Taipei 106,
Taiwan (e-mail:[email protected]).
Y.-C. Liu is with International Games System Co., Ltd., Taipei
248, Taiwan(e-mail: [email protected]).
Color versions of one or more of the figures in this paper are
available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMECH.2011.2111376
Because of its promising properties, studies have recently
applied MPC to a variety of mechatronic and motion control
applications, such as motor control [2], [3], two-stage
actuation
system control [4], inverted pendulum control [5], machine
tool
chatter suppression [6], active noise and vibration control
[7],
and trajectory tracking of robotic systems [8][10]. Among
the
aforementioned applications, MPC of electrical motor drives
has become increasingly more popular in the industries
because
combined control of the motor speed and current with lim-its may
be financially beneficial to energy efficiency and power
consumption. However, since motor drives can be categorized
as
actuators of mechatronic systems [11], it is also worthy to
inves-
tigate MPC control performance using a different and broader
perspective. This study specifically focuses on motion
control,
an important part of mechatronics [11].
Motion control generally covers topics including position
control, velocity control, current control, or force control
of
robotics and machine tools [12]. Several researchers have
stud-
ied using MPC for speed control and current control of [2],
[3],
[13] mechatronic systems, mostly concentrated on electrical
drives as mentioned earlier. For position control of
mechatronic
systems using MPC, the literature, however, is limited on
thestudy of trajectory tracking or obstacle avoidance of robotic
sys-
tems [8][10], [14]. In [4], the authors discussed
implementing
MPC on a dc motor and PZT-based two-stage actuator system in
tracking various reference inputs. Because of the applied
PZT
actuator, this paper investigated the MPC tracking control
of
fast mechatronic systems with a 2-kHz sampling rate. More-
over, several studies have achieved precision tracking
control
with the aid of internal model-based repetitive control for
track-
ing periodic signals [15], [16].
Although MPC seemingly leads to an extended research topic
in the mechatronics field, some issues still need
investigating.
For example, the applied sampling rates in most available
appli-cations are comparatively slow from the real-time
perspective,
mainly due to the requirement of on-line optimization for
con-
straint handling. This necessary tradeoff may introduce the
so
called intersample error in high-bandwidth sampled-data con-
trol systems [17]. In addition, few studies have applied MPC
to
mechatronic systems for performance improvement, especially
with constraint handling results. Although, the recent
research
done in [7] shows the success of applying MPC to active
noise
and vibration suppression with input constraints at a 5-kHz
sam-
pling rate, precision tracking control with constraint
handling
for fast mechatronic systems is still rarely discussed in the
ex-
isting literature.
1083-4435/$26.00 2011 IEEE
-
7/29/2019 Che055precision tracking project4 Ieee
2/13
594 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4,
AUGUST 2012
This paper investigates MPC control performance for track-
ing control and constraint handling of mechatronic systems.
To
generalize using the MPC controller on high-bandwidth mecha-
tronic systems, this study designed servo algorithms at a
10-kHz
sampling rate and implemented them on a fast PZT actuator
sys-
tem as an exemplary hardware platform for discussion. Faster
sampling implementation typically implies increased spindle
speed of rotating devices or repeated production efficiency,
ob-
taining increased economic benefits. The selected sampling
rate
in this paper should be fast and illustrative enough for a
vast
number of position control applications. In particular, this
study
shows improved control performance by considering the con-
straints for periodic motion tracking and demonstrates the
prac-
ticability and the potential of applying the MPC controller
for
fast mechatronic systems.
The rest of this paper is organized as follows. Section II
reviews the basics of MPC and the problem formulation.
Section III presents the integral MPC for step tracking and
con-
straint handling. Section IV demonstrates the repetitive MPC
for
periodic signal tracking and constraint handling with
quadraticprogramming problem formulation. Section V presents a
de-
tailed discussion on MPC parameters selection and controller
performance with constraints for precision tracking through
ex-
perimental results. Finally, this paper provides several
conclud-
ing remarks and future impacts of using MPC for mechatronic
systems servo design.
II. MPC AND PROBLEM FORMULATION
A. Review of MPC
A review of the main concept of MPC is available in Ma-
ciejowskis book [18]. Here, we assume that the plant model
islinear, discrete, and time invariant. Building a prediction
model
based on the control system of interest is the first step. The
er-
ror E(k) between the predicted control output Yp (k) and
thereference trajectory Rre f(k) and changes of the input
vectoru(k) are then penalized by a quadratic cost function J(k)with
weighting matrices Q, R as shown in (1). Appropriate al-gorithms
minimize J(k) to obtain the optimal change of inputsequence u(k).
From (2), u(k) includes the informationchanges of current and
future control inputs. Third, this paper
calculates the current control u(k) by summing the
previouscontrol input u(k 1) and u(k). The dimensionality of
thecost function J(k) depends on the lengths of prediction
horizon
Hp and control horizon Hc . Moreover, the weighting parame-ters
Q and R influence the system output and control input andhave to
satisfy the conditions Q 0, R > 0
J(k) =1
2
Hpi= 1
E(k + i)2Q (i) +Hc 1
i=0
u(k + i)2R(i)
(1)
where
E(k + i) = Yp (k + i) Rre f(k + i)
u(k) = [u(k)u(k + 1) u(k + Hc 1)]T
u(k) = u(k 1) + [I 0 0 ]u(k). (2)
B. Problem Formulation
Let us consider the discrete state-space model and assume
that all states (x(k) Rn ) are measurable without disturbancesor
measurement noises so far
x(k + 1) = Ax(k) + Bu(k)
y(k) = Cx(k). (3)For simplicity, assume that the plant model is
a single-input,
single-output and causal system. Note that no feedthrough
term
appears in (3) since most mechatronic systems satisfy
thecausal-
ity assumption. Using this state-space model and following
sim-
ilar derivation procedurein [18], we canbuilda prediction
model
as shown in the following equation:
X(k + 1) = x(k) + u(k 1) + u(k)
Yp (k) = X(k) (4)
where
X(k) = x(k)...
x(k + Hp 1)
= A...AHp
=
BAB + B
...Hp 1i= 0 A
i B
=
C 0 0
0 C ...
......
. . ....
0 C
=
B 0AB + B 0
.... . .
...
Hp 1i= 0 Ai B Hp Hci=0 Ai B
.
As can be seen, the predicted output Yp (k) coming from (4)can
be used to construct the cost function J(k) of MPC in (1).Several
approaches can solve this minimization problem. One
is directly taking the derivative with respect to J(k) to
findthe optimal change of input u(k). However, this method maycause
inverse matrix calculation and have ill-conditioned issues,
which will bring incorrect results. Furthermore, this method
is
not applicable to the case when adding constraints. This
study
therefore applies quadratic programming (QP) to solve MPC
since QP is an algorithm, which solves optimization problems
with constraints applied on the cost function variables. A
stan-
dard QP problem formulation can be expressed as (5), whereRn , H
is an n n positive definite symmetric matrix, andf is an n 1
arbitrary vector, respectively. and are thecorresponding matrices
of the constrained condition in QP
F() =1
2TH + fT (5)
subject to
J(k) =1
2u(k)T 1
H
u(k)
+ u(k)T (2 u(k 1) + 3 x(k) 4 Rre f(k + 1)) f
-
7/29/2019 Che055precision tracking project4 Ieee
3/13
LIN AND LIU: PRECISION TRACKING CONTROL AND CONSTRAINT HANDLING
OF MECHATRONIC SERVO SYSTEMS 595
Fig. 1. MPC control structure with no constraints and full state
measurement.
where
1 = T T Q + R 3 =
T TQ
2 = T T Q 4 =
T TQ.
Notice that this QP formulation is also applicable to the
case
without constraints. Fig. 1 shows the MPC control structure
with
no constraints and full state measurements.
C. MPC With Constraints
One objective of this study is to improve the control
perfor-
mance of high-bandwidth servo systems by taking advantage of
constraint-handling property in MPC. The constraints MPC can
handle include input constraints and output constraints. The
in-
put constraints are typically applied to avoid actuator
saturation
within a desired input range [um in , um ax ]. Similarly, the
outputconstraints are meant to demand the system to operate within
an
output range [ym in , ym ax ] for collision avoidance or
emergencyprotection. The constraint condition can be represented
as
umi n
umi n...
umi nym inym in
...
ym in
u(k)
u(k + 1)...
u(k + Hc 1)y(k)
y(k + 1)...
y(k + Hp 1)
uma x
uma x...
uma xyma xyma x
...
yma x
. (6)
To solve the constrained MPC using QP formulation, the in-
equality (6) must be reformulated based on the optimization
variable u(k). After appropriate manipulation, the inequal-ity
corresponding to the QP constraint condition in (5) can be
represented as
Cf1 Cf2 u(k) Ruy Cf1 Cf3 x(k) Cf1 Cf4 u(k 1)(7)
where the details of Cf1 , Cf2 , Cf3 , Cf4 , and Ruy are
attachedas Appendix A. As expected, this constraint condition
would
introduce the so called computational burden in most MPC
since the designers have to define a numerical precision
check
value (e.g., 106 or less) to satisfy the condition and to
terminatethe QP solver process after iterative parameter
adjustment. It
is obvious that minimal check values would retard the whole
optimization process. For QP optimization, there exist
several
algorithms to solve QP problems. This study applied
Hildreths
Fig. 2. MPC control structure with state estimator and
integrator.
QP procedure and solved the QP problem on-line by the code
provided by Wang [19].
In most cases, the input constraints are hard ones, meaning
the input must strictly follow the limit range. On the other
hand,
the feasibility of the QP solver is highly related to the
state
accuracy when transforming output constrained MPC into QP
formulation. As a result, certain output perturbation is
tolerable
with released constraints (soft constraints) since in real
systems,prefect state information is hardly available.
III. MPC FOR STEP TRACKING
As various interdisciplinary physical principles may be in-
volved, it is difficult or costly to have full state
measurement
for the mechatronic systems of interest. To estimate the
states
from systems output for feedback control, duplicating the
orig-
inal system dynamics with an observer gain simply constructs
state observers [20]. However, the obtained system dynamics
is mostly from system identification techniques and
correctness
of the estimated states is dependent on modeling errors. In
real
implementation, this inevitable fact could cause nonzero
steady-state error and adding an integrator typically compensates
this
error and obtains robust tracking [20]. Fig. 2 depicts the
MPC
control structure with state estimation and integral control.
This
control structure is a decentralized design, which simply
adds
control inputs from MPC and integral control. Although inte-
gral gain tuning eliminates the steady-state error, this
control
structure is incapable of constraint handling since the
integra-
tor dynamics is not included in QP formulation. Therefore,
this
research derives and presents an integrated control
structure
combining MPC with integral control and constraint handling
(IMPC) for step tracking.
A. State Observer Design
Several approaches can design the observer for state esti-
mation, including common pole placement or the well-known
Kalman filter method, especially when measurements are
noisy.
This study applies the generalized Luenberger observer (pole
placement) for convenience. Let the state estimation error
be
e(k) = x(k) x(k) with the estimated state vector x(k).
Byconstructing and subtracting the observer dynamics from the
original system dynamics, the estimation error dynamics be-
comes e(k + 1) = (A LC)e(k). To assure stability, the gainL has
to be designed such that all the eigenvalues of (A LC)
locate inside the unit circle in the z-plane. The following
-
7/29/2019 Che055precision tracking project4 Ieee
4/13
596 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4,
AUGUST 2012
summarizes the observer dynamic equation as follows:
x(k + 1) = (A LC)x(k) + Bu(k) + Ly(k)
y(k) = Cx(k).
B. MPC With Integral Control and Constraint HandlingTo formulate
the MPC with integral control and constraint
handling, a forward difference method for numerical
integration
with an integrator state w(k) is chosen as follows:
w(k + 1) = w(k) + Ts (Rre f(k) Y(k)) (8)
where Ts represents the sampling time. After combining the
in-tegrator and system dynamics, the augmented system dynamics
can be represented as
x(k + 1) = Ax(k) + Bu(k) + KRre f(k)
Y(k) = Cx(k) (9)
where
x(k) =
x(k)w(k)
A =
A 0
Ts C 1
B =
B0
K =
0
Ts
C = [ C 0 ] .
With the state-space representation including the integral
con-
trol dynamics, we write the IMPC control law uint (k)
withintegral gain Ki
uint (k) = u(k 1) + [I 0 0 ]u(k) + Ki w(k). (10)
If we take into account the horizon lengths Hp and Hc and
use(10), we build a prediction model as
X(k + 1) = Ax(k) + Bu(k 1) + Du(k)
+ Ew(k) + FR(k) + GY(k)
Y(k + 1) = CX(k + 1). (11)
Note that the notations of (10) can be referred to Appendix
B.
The cost function JI(k) combining integral and MPC
controlbecomes
JI(k) =1
2{Y(k + 1) Rre f(k + 1)
2Q + u(k)
2R }.
(12)
To solve this MPC control problem using QP solver, (12)
istransformed to
JI(k) =1
2u(k)THu(k) + u(k)T (fint ) (13)
subject to u(k)
where
H = DTQD+ R
fint = 1 x(k) + 2 u(k 1) 3 w(k) + 4R(k) + 5Y(k)
6 Rre f(k)
1 = DT
QA 4 = DT
QF
Fig. 3. Prototype repetitive control block diagram.
2 = DTQB 5 = D
T QG
3 = DTQE 6 = D
T Q.
The constrained condition in (13) applies the same notations
in
(7).
IV. MPC FOR PERIODIC SIGNAL TRACKING
In practice, the IMPC controller derived in the previous
sec-
tion should be able to satisfy the needs in slow mechatronic
systems, such as set-point regulation. However, in motion
con-
trol applications, the reference signal mostly contains
periodicsignal components such as sinusoidal or trapezoidal
tracking
profiles. Examples include precision scanning [21],
noncircular
machining [22], or circular contouring [23], [24]. The
integrated
control structure combining MPC is incapable of periodic
pro-
file tracking since the integral control is only applicable to
static
motion control. To enlarge the scope and applicability of
MPC
design for precision motion control, this study also presents
an
MPC method with repetitive control for periodic signal
tracking
and constraint handling simultaneously.
A. Repetitive Control
This study applies the prototype repetitive control theoryfrom
[25] due to its simplicity and suitability for discrete-time
control law derivation. The idea is to include an internal
model
of the input signal to the feedback control loop for controller
de-
sign. Applying the internal model principle [26] and
considering
the closed-loop stability carefully, we can achieve
asymptotic
error for periodic signal tracking. Fig. 3 represents the
control
block diagram, in which the repetitive controller (RC)
contains
a stabilizing controller CZPETC and a periodic signal genera-tor
with a known period. The RC Cre p can be represented asfollows:
Cre p =Qfilterz
P1
1 Qfilterz(P
1+P
2)
CZPETC (14)
where
P1 = N d nu nq; P2 = d + nu
CZPETC = Kre fA(z1 )Bu (z1 )
Ba (z1 )Bu (1)2. (15)
A(z1 ) includes all poles of the plant, Bu (z1 ) includes
allunstable zeros of the plant, Ba (z1 ) includes all stable
zerosof the plant, and Bu (1) scales the steady-state gain of the
con-troller. Moreover, Kre f is the repetitive learning gain. N is
thenumber of the signal period. d stands for the number of
plant
delays, and nu represents the number of unstable zeros of
the
-
7/29/2019 Che055precision tracking project4 Ieee
5/13
LIN AND LIU: PRECISION TRACKING CONTROL AND CONSTRAINT HANDLING
OF MECHATRONIC SERVO SYSTEMS 597
Fig. 4. RMPC structure with state estimator.
plant. nqis the order of the low pass Qfilter which will be
men-tioned later. CZPETC , a stable inversion of the plant
dynamics,is the zero phase error tracking controller and can be
designed
by the method reviewed in [27].
As the RC design always includes high-gain feedback at high
frequencies, which may excite the unmodeled dynamics and
induce the instability during implementation, a zero-phase
low-
pass filter Qfilter can be added to suppress this undesired
effect.The Qfilter is selected as
Qfilter = (az + b + az1 )n (16)
where a and b satisfies 2a + b = 1 for unity dc gain and nis a
positive integer. Although Qfilter is a noncausal filter,
thecontrollers causality is still assured because of the
cascaded
long-delay terms zP1 and zP2 .
B. Repetitive Model Predictive Control (RMPC)
Problem Formulation
After introducing the basic control structure of the RC, the
next step is to integrate the RC with MPC properly to
simultane-ously preserve the desired properties in periodic signal
tracking
and constraint handling. The proposed RMPC structure to ac-
complish this goal is shown in Fig. 4. Notice that in the
follow-
ing, a state observer is adopted using pole placement for
state
estimation mentioned in Section III-A.
From Fig. 4, the new control law URMPC is represented as
URMPC (k) = u(k 1) + [I 0 0 ]u(k) + URC (k)(17)
Following the concept and procedure introduced in Section II
and Section III-B, we can establish a predicted model for
RMPC
Yr (k + 1) = Ar x(k) + Br u(k 1)
+Dr u(k) + Dr URC (k). (18)
The detailed notations of (18) can be referred to Appendix
C.
If we compare (4) with (18), the predicted output in RMPC
has an extra vector URC (k) which contains the predicted
repet-itive control signals up to the control horizon. To obtain
the
repetitive control law at the current sampling time, we
derive
the z-domain transfer function from the tracking error e to
therepetitive control URC as follows:
URC (z1 )
e(z1 )= Kre f
RCn
1 RCd(19)
where
RCn =
zP1 2nq
i=0
Qi+ 1 zi
Pzj =0
wNj + 1 zPz j
RCd
= z(P1 +P2 )2nq
i=0
Qi+ 1
ziPz
j =0
wDj +1
zPz jQ represents the coefficient of the Qfilter. w
D and wN standfor the denominator and numerator coefficients of
CZPETC ,respectively. Pz represents the sum of the number of poles
andunstable zeros of CZPETC . Since the RC includes a long-termtime
delay, in vector URC (k), the repetitive control law URC ateach
predicted sampling period is still casual.
With the repetitive control law and given Hp and Hc ,
theRMPC-predicted output Yr (k) can be represented in terms ofthe
combination of x(k), u(k 1), u(k), and URC (k). Ac-cordingly, this
research reformulates and transforms the cost
function for RMPC to a QP formulation similar to (13)
JR (k) =1
2u(k)THRC u(k) + u(k)
T (fRC ) (20)
subject to u(k)
where
HRC = DrT QDr + R
fRC = 1 x(k) + 2 u(k 1) 3URC (k) 4 Rre f(k)
1 = DrT QAr 3 = Dr
T QDr
2 = DrT QBr 4 = Dr
T Q.
Still, the constrained condition in (20) applies the same
no-
tations in (7). This procedure finishes the derivation of
RMPC
for periodic signal tracking and constraint handling. The
next
section designs and implements the proposed IMPC and RMPC
on a piezoactuated system to demonstrate its effectiveness.
V. APPLICATION TO A PIEZOACTUATED SYSTEM
This study chooses the piezoactuated system as the experi-
mental platform for MPC control performance evaluation for
two reasons. First, as tracking control plays an important role
in
motion control applications, actuator saturation is still a
tough
issue, which greatly affects practical tracking performance
andlimits the actual used travel length of the actuators [28],
es-
pecially for vast popular piezoactuated systems such as AFMs
or nanostages. To this end, MPC may become a feasible solu-
tion for handling constraints and achieving high-performance
precision motion control of nanopositioning devices. Second,
high-bandwidth or fast dynamic systems such as piezoactuated
systems require a fast enough sampling rate to avoid
aliasing
errors during digital implementation [17]. Therefore,
success-
ful precision tracking results of applying MPC on a piezoac-
tuated system can automatically extend to a more broad range
of mechatronic systems. The frequently discussed issue of
hys-
teresis compensation using various mathematical modeling is
-
7/29/2019 Che055precision tracking project4 Ieee
6/13
598 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4,
AUGUST 2012
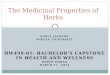
Fig. 5. Schematic diagram of employed instruments.
beyond the scope of this paper, but is referred to in the
vastpiezotracking literature [29][32].
A. Hardware Description and System Identification
Fig. 5 illustrates the schematic diagram of the experimen-
tal apparatus. The apparatus consists of a piezoelectric
actuator
(Piezomechanik Pst 150/5/20 VS10) and a strain gauge driven
by power amplifiers. The maximum stroke of the piezoelec-
tric actuator is 20 m. The control scheme was implementedusing
MATLAB Simulink, and the data were acquired by a
16-bit data acquisition card (NI PCI-6052E) at a 10-kHz sam-
pling rate. The CPU in the used target computer is an AMD
Athlon X2 Dual-Core processor with a 2.9-GHz clock rate. Fora
more detailed discussion about MPC implementation using
MATLAB, see Wangs work in [19]. To obtain the system model
for MPC design, this research performed a time-domain system
identification method using autoregressive exongeneous by
in-
jecting a chirp input signal. As system output drifting occurs
in
piezoactuated systems due to nonlinearities, closed-loop
system
identification [33] with a PI feedback controller was applied
to
eliminate this error. Fig. 6 shows the open-loop model
frequency
response and validation results. As can be seen, the
identified
second-order model is good enough for controller design and
simulation.
B. Simulation and Experimental Results
After obtaining the identified system model, this study de-
signed and implemented the IMPC and RMPC controller on the
piezoactuated system for controller performance evaluation.
To
verify IMPC controller effectiveness in real-time
implementa-
tion, this research conducted several experiments for tracking
a
1-Hz square-wave reference signal, and presented the
necessity
of adding integral control for reducing steady-state errors
by
comparing with the result using MPC alone. This paper also
discusses the influences of adjusting parameters Hp , Hc , Q ,
Rin the MPC problem. Moreover, this investigation adopted the
following two periodic profiles for high-frequency profile
track-
Fig. 6. Piezoelectric actuator frequency response and model
validation.
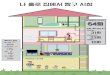
Fig. 7. Reference signals applied in this study. (a) 10-Hz
sinusoidal signal.(b) 20-Hz special signal.
ing experiments. Fig. 7(a) shows a 10-Hz sinusoidal
reference
signal, and Fig. 7(b) is a special case of Fig. 7(a) with an
abso-
lute function applied. Obviously, the frequency components ofthe
reference signal in Fig. 7(b) are more complicated than the
signal in Fig. 7(a) because of the nonsmooth transition.
Finally,
this paper compared the experimental results of IMPC and the
RMPC controller with constraint handling to the result using
standard saturation techniques.
1) Integral Gain Ki : Fig. 8 shows the experimental resultsof
using MPCwith different integral gains, where Ki = 0 meansno
integral control is included. As can be seen, using standard
MPC without the integrator exhibits nonzero steady-state
errors
due to inaccurate estimated states from modeling error.
Acti-
vating the integrator achieved convergent steady-state error.
Al-
though, increasing the value ofKi improves convergent speed,
-
7/29/2019 Che055precision tracking project4 Ieee
7/13
LIN AND LIU: PRECISION TRACKING CONTROL AND CONSTRAINT HANDLING
OF MECHATRONIC SERVO SYSTEMS 599
Fig. 8. Different integral gain Ki : experimental results.
Fig. 9. Different prediction horizon Hp length: experimental
results.
overshoot behavior also occurs. The following results
account
for state estimation and integral control unless otherwise
stated.
2) Horizon Length Hp andHc : Figs. 9 and 10 demonstratethe
impacts of different predictions and control horizon lengths
on system performance. Fig. 9 shows that increasing Hp
obtainsfaster convergent speed for step tracking. However, one
should
note that increasing Hp values will not necessarily
improvetransience performance when applying unmodeled
disturbance
(e.g., a load torque) to the control system. Without enough
infor-
mation such as the type of disturbance and future input
move-
ments, it is difficult to have an accurate disturbance
estimate
and prediction outputs. On the other hand, the increase in
Hc slows the system output performance. This is because largerHc
means further focus on control energy and thus reduces thetransient
speed. Fig. 10 also shows that obvious overshoot oc-
curs when using less control horizon. Moreover, according to
authors experiences, Hc is the most important factor
determin-
Fig. 10. Different control horizon Hc length: experimental
results.
Fig. 11. Different weighting gain of cost function: experimental
results.
ing the computation time for MPC controller implementation.
This finding may be attributed to the fact that larger Hc
alsoincreases the number of solving variables and complicates
the
optimization process. Besides the horizon length,
undoubtedly
the success of real-time MPC implementation is greatly
depen-dent on the specs of system microprocessor.
3) Weighting Parameters Q andR: The parameters Q andR represent
the weighting for prediction and control horizon,respectively.
Adjusting the ratio of these two weighting param-
eters, adjusts the system output performance. As Q increases,
afixed R decreases the influence of R and vice versa. As shownin
Fig. 11, the increase in Q means that output performanceis more
concerned and thus the settling time is faster. On the
contrary, the control input becomes relatively important as Q
de-creases, meaning that the control move is very aggressive
with
large change in one sampling instant. In this case, the result
in
Fig. 12 shows control saturation and obvious output
transient
-
7/29/2019 Che055precision tracking project4 Ieee
8/13
600 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4,
AUGUST 2012
Fig. 12. Different weighting gain of cost function: experimental
results.
oscillation, but less control effort at steady state. Although
set-
ting Q = R gives intermediate results, it still requires
someexperimental tuning to achieve a tradeoff between output
per-
formance and control effort.
4) Input Constraints: As mentioned in the previous discus-
sion, the MPC controller is especially useful for constraint
han-
dling. Coming from actuator saturation or physical operation
range limits, the input constraints significantly affect the
con-
trol performance. Thepiezoactuated system applied in this
study
can accept 07.5 V control input before a twenty times
voltage
amplifier. As the increase in integral gain raises the
transientspeed, the extra-required control effort may also cause
input
saturation and reduce the control performance. To highlight
this
phenomena and the controller performance, this study adopted
an artificial input constraint with range 1.655.85 V for the
MPC design. The diagram from Figs. 13 and 14 compares be-
tween MPC with stricter control input saturation limit and
MPC
with input constraint handling results. The previous two
con-
trols can be referred to as serendipitous design and
tactical
design [34], respectively. The serendipitous design, a
strat-
egy that just adds input constraints after finishing the
controller
design, shows a retarded output response and large control
un-
dershoot. However, the design that considers input
constraints
in the control calculation (tactical design) shows about
eighttimes less response time and smaller control effort at
steady
state. From Figs. 13 and 14, it is evident that MPC with
input
constraint handling provides better control performance even
in
high-bandwidth servo systems.
5) Output Constraints: Given the earlier results, this paper
now discusses the output constraint results. Most successful
output constraint handling results using MPC belong to pro-
cess control applications. However, few studies have
investi-
gated implementing MPC in mechatronic systems, owing to
the computational burden, as output becomes part of the con-
straint condition. A few output constraints in mechatronic
sys-
tems include safety protection or mechanism constraint (dead
points). For demonstration purposes, this study puts a
satura-
tion block (in Simulink) at the system output to represent
the
actual output constraint. Fig. 15 shows the experimental
results
of MPC with output constraint handling, compared to the re-
sults of MPC without constraint handling and MPC with an
artificial output constraint, all within 5.6 m.
Unfortunately,the output response is far from the expected
reference, even
with the integral control. The results may be attributed to
the
plant uncertainties and imperfect state estimation in real
im-
plementation. Since the QP problem formulation requires the
information of system states x(k) from state observers, the
ac-curacy ofx(k) may affect the MPC solver and thus the successof
output constraint handling. The simulation result shown in
Fig. 16 verifies the aforesaid conjecture. As shown, the MPC
with output constraint handling performs well under the
applied
output constraint, without considering plant uncertainty.
How-
ever, the result with plant uncertainty that assumes adding
some
unmodeled dynamics demonstrates a similar trend compared
with the experimental result. This interesting observation
em-
phasizes the importance of accurate modeling for
successfullyimplementing MPC output constraint handling.
6) Periodic Signal Tracking: The previous sections have fo-
cused on IMPC controller performance for tracking a square
wave. We now consider using the RMPC controller for tracking
a periodic signal, which is a common profile benchmark for
evaluating precision motion control performance. This study
first compares the RMPC with the RC, MPC, and IMPC for
tracking the reference signal depicted in Fig. 7(a). This
com-
parison does not consider constraint handling in MPC, IMPC,
and RMPC designs. Fig. 17 shows the transient and
steady-state
experimental results.
Clearly, applying RC alone provides almost sensor noiselevel
steady-state error. However, before 0.4 s, the transient
error is relatively larger than using the other three control
ap-
proaches. Since the main purpose of traditional MPC design
is to deal with constraints for
multiple-inputmultiple-output
process control systems, it is natural to see nonconverging
steady-state errors. Although the IMPC design reduces the
er-
ror significantly, including integral control limits the
tracking
performance.
The importance of applying RMPC for periodic signal track-
ing becomes obvious after introducing the previous results.
As
indicated in Fig. 17, the RMPC still preserves the benign
prop-
erties of RC in tracking periodic signals for converged
errors
and provides a faster converging rate than applying RC
alone.Most importantly, the proposed RMPC is able to track
periodic
signals when considering constraints as part of controller
design
parameters. The next section illustrates the experimental
results
with input constraints.
7) Periodic Signal Tracking With Input Constraints: Since
most motion control systems contain an actuator saturation
or
input limitation, investigating the controller performance
of
RMPC with input constraints is worthwhile. To highlight the
control performance, this study conducted experiments to
track
the reference signal depicted in Fig. 7(b). This special
signal
is very common and particularly similar to the profiles used
in industry applications such as triangular scanning wave
[21]
-
7/29/2019 Che055precision tracking project4 Ieee
9/13
LIN AND LIU: PRECISION TRACKING CONTROL AND CONSTRAINT HANDLING
OF MECHATRONIC SERVO SYSTEMS 601
Fig. 13. IMPC with input constraints: experimental results in
11.02 s.
Fig. 14. IMPC with input constraints: experimental results in
1.51.52 s.
Fig. 15. Output constraints experimental results.
or the repetitive piston motion profile [22]. The results
are
compared with the case with an artificial input saturation
block
and the case without any constraint.
Fig. 16. Output constraints simulation results.
In this study, the input command is limited within 3.55
5.95 V. Figs. 1820 depict the experimental results of track-
ing a periodic signal with input constraints. Fig. 18 shows
an
-
7/29/2019 Che055precision tracking project4 Ieee
10/13
602 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4,
AUGUST 2012
Fig. 17. Periodic signal tracking: experimental results.
Fig. 18. Periodic signal tracking with input constraints:
experimental results in 02 s.
Fig. 19. Periodic signal tracking with input constraints:
experimental results in 0.450.65 s.
obvious overshoot, both in system output and control input
for
the case without any constraint handling (blue dashed line).
Al-
though adding the input saturation block (red dashed line)
sim-
ply solves the constraint issue, the control performance of
the
case applying careful input constraint handling (green solid
line)
still shows better improvement, such as faster transient
speed
and less saturation time. Readers interested in output
constraint
handling results might want to refer to [35].
-
7/29/2019 Che055precision tracking project4 Ieee
11/13
LIN AND LIU: PRECISION TRACKING CONTROL AND CONSTRAINT HANDLING
OF MECHATRONIC SERVO SYSTEMS 603
Fig. 20. Periodic signal tracking with input constraints:
experimental results in 9.810 s.
VI. CONCLUSION AND FUTURE WORK
As microprocessor technology matures and rapidly develops,
there is an emerging opportunity for using classic advanced
controls as servo control design alternatives for the
mechatronics
community. Therefore, this study presents precision tracking
control and constraint handling of mechatronic servo systems
using MPC.
The current research focuses on integral MPC from a motion
control perspective, by discussing design parameter
selection
as well as control performance of constraint handling and
step
tracking. RMPC is a technique that deals with constraints
and
eliminates the steady-state error coming from the
determinis-
tic components of periodic tracking signals. The
experimental
results demonstrate the effectiveness of MPC controllers on
apiezoactuated system with a fast sampling rate.
However, the controllers discussed in this paper are limited
in output constraint handling because of inevitable modeling
errors. This issue may remain as an extended research topic
for
future work. Suggestions such as softening the constraints
[36],
[37] or applying linear matrix inequalities based on robust
MPC
[38], [39] are some simulation examples for possible
directions
for further successful constrained control implementation.
On the other hand, the sampling rate used in this study
proves that recent microprocessor technology is already pow-
erful enough to implement MPC controllers in common real-
time motion control applications, even with considering
con-straint handling. Therefore, implementing MPC controllers
on
specialized hardware has recently attracted much interest
from
academia, and particularly control engineers. Examples
include
digital signal processor [7], field programmable gate array
[40],
[41], or more general purpose microprocessors [42]. Advanced
MPC approaches that apply on-line tuning algorithms in pre-
vious process control literatures [43][45] should be
revisited
and applied on fast dynamic systems for future research and
applications are expected.
With the advent of microprocessor technology, an explicit
MPC technique considering position control, velocity
control,
and acceleration control with as many constraints as needed,
similar to process control applications, may become feasible
for
real-time motion control. This feature and more, if
appropriately
embedded on a low-cost chip [46], can bring substantial
eco-nomic benefits to industries. We believe that further
advanced
MPC control approaches and applications for mechatronic sys-
tems will appear soon.
APPENDIX A
Cf1 =
1 0 0
1 0. . . 0
0 1. . .
...
0 1. . .
......
.... . .
......
.... . . ...
0...
. . . 10 1
, Cf2 = Cf21Cf22
,
Cf3 =
0...
0C
CA...
CAH c
, Cf4 =
1...
10
CB...
H cnj = 0 CA
j B
Cf21 =
1 0 0
1 1 0 ...
......
.... . .
...
1 1
,
Cf22 =
0 0 0 0CB 0 0 0
CAB + CB CB 0 0...
......
. . ....H cn
j =0 CAj B CB 0
Ruy = [um ax um in um ax umi n yma x ymi n
ym ax ym in ]T .
-
7/29/2019 Che055precision tracking project4 Ieee
12/13
604 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 17, NO. 4,
AUGUST 2012
X(k + 1) =
x(k + 1)x(k + 2)
...
x(k + Hp )
, Y(k + 1) =
Y(k + 1)Y(k + 2)
...
Y(k + Hp )
, R(k) =
Rre f(k)Rre f(k + 1)
...
Rre f(k + Hp 1)
, A =
AA2
...
AHp
B =
B
AB + B...Hp 1
j = 0 Aj B
, C = C 0 0
0 C ......
.... . .
...
0 C
, D = B 0
AB + B 0...
. . ....Hp 1
j = 0 Aj B
Hp Hcj = 0 A
j B
E =
BKiABKi + 2BKi
...
(Hp
l= 1 lAHp l B)Ki
, F =
K 0AK BKi Ts K 0
... . . . 0
AHp 1 KHp 1
m =0 mAHp m 1 BKi Ts AK BKi Ts K
G =
0 0 0BKi Ts 0 0 0
ABKi Ts + 2BKi Ts BKi Ts 0 ...
... ... ... . . . ...Hp 1w =0 wA
Hp w 1 BKi Ts BKi Ts 0
APPENDIX B
X(k + 1),B,E,G,R(k), andD are defined as shown at thetop of the
page.
APPENDIX C
Yr (k + 1) =
Y(k + 1)
Y(k + 2)...Y(k + Hp )
, Ar = CA
CA2...CAHp
Br =
CBCAB + CB
...Hp 1j = 0 CA
j B
Dr =
CB 0CAB + CB 0
.... . .
...
Hp 1j = 0 CAj B Hp Hcj =0 CAj B
URC (k) =
URC (k)URC (k + 1)
...
URC (k + Hc 1)
.
REFERENCES
[1] S. J. Qin and T. A. Badgwell, A survey of industrial model
predictivecontrol technology, Control Eng. Practice, vol. 11, no.
7, pp. 733764,2003.
[2] S. Bolognani, L. Peretti, and M. Zigliotto, Design and
implementationof model predictive control for electrical motor
drives, IEEE Trans. Ind.
Electron., vol. 56, no. 6, pp. 19251936, Jun. 2009.
[3] E. S. de Santana, E. Bim, and W. C. do Amaral, A predictive
algorithmfor controlling speed and rotor flux of induction motor,
IEEE Trans. Ind.Electron., vol. 55, no. 12, pp. 43984407, Dec.
2008.
[4] V. A. Neelakantan, G. N. Washington, and N. K. Bucknor,
Model predic-tive control of a two stage actuation system using
piezoelectric actuatorsfor controllable industrial and automotive
brakes and clutches, J. Intel.Mater. Syst. Struct., vol. 19, no. 7,
pp. 845857, 2008.
[5] C.N. Lu, C.C. Tsai, M.C. Tsai, K.V. Ling, and W.
S.Yao,Application ofmodel predictive control to parallel-type
double inverted pendulum drivenby a linear motor, in Proc. IEEE
IECON, 2007, pp. 29042909.
[6] Z. Hu and D. F. Farson, Design of a waveform tracking system
for a
piezoelectric actuator, Proc. Inst. Mech. Eng., Part I: J. Syst.
ControlEng., vol. 222, no. 1, pp. 1121, 2008.
[7] A. G. Wills, D. Bates, A. J. Fleming, B. Ninness, and S. O.
R. Moheimani,Model predictive control applied to constraint
handling in active noiseand vibration control, IEEE Trans. Control
Syst. Technol., vol. 16, no. 1,pp. 312, Jan. 2008.
[8] P. Poignet and M. Gautier, Nonlinear model predictive
control of a robotmanipulator,inProc. IEEE Workshop Adv. Motion
Contr., 2000, pp.401406.
[9] S. G. Vougioukas, Reactive trajectory tracking for mobile
robots basedon nonlinear model predictive control, in Proc. IEEE
Int. Conf. Robot.Automat., 2007, pp. 30743079.
[10] G.Klancar and I. Skrjanc, Tracking-error model-based
predictive controlfor mobile robots in real time, J. Robot. Auton.
Syst., vol. 55, no. 6,pp. 460469, 2007.
[11] O. Kouhei, M. Shibata, and T. Murakami, Motion control for
advancedmechatronics, IEEE/ASMETrans. Mechatronics, vol.1, no.
1,pp.5667,Mar. 1996.
[12] G. Otten, T. J. A. De Vries, J. Van Amerongen, A. M.
Rankers, andE. W. Gaal, Linear motor motion control using a
learning feedforwardcontroller, IEEE/ASME Trans. Mechatronics, vol.
2, no. 3, pp. 179187,Sep. 1997.
[13] A. Linder and R. Kennel, Model predictive control for
electrical drives,in Proc. IEEE Power Electron. Spec. Conf., 2005,
pp. 17931799.
[14] V. M. Becerra, S. Cook, and J. Deng, Predictive
computed-torque controlof a PUMA 560 manipulator robot, presented
at the 16th IFAC WorldCongr., Prague, Czech Republic, 2005.
[15] H. Ito, C. Nakazawa, T. Matsui, K. Matsumoto, and H.
Nishida, Modelpredictive control for a periodic reference signal,
inProc. Soc. InstrumentControl Eng. (SICE) Ann. Conf., 2007, pp.
25742577.
[16] R. Caoand K. S. Low, A repetitive modelpredictive control
approach forprecision tracking of a linear motion system, IEEE
Trans. Ind. Electron.,vol. 56, no. 6, pp. 19551962, Jun. 2009.
-
7/29/2019 Che055precision tracking project4 Ieee
13/13
LIN AND LIU: PRECISION TRACKING CONTROL AND CONSTRAINT HANDLING
OF MECHATRONIC SERVO SYSTEMS 605
[17] K. J. Astrom and B. Wittenmark, Computer-Controlled
Systems: Theoryand Design, 2nd ed. Englewood Cliffs, NJ:
Prentice-Hall, 1990.
[18] J. M. Maciejowski, Predictive Control With Constraints.
Upper SaddleRiver, NJ: Prentice-Hall, 2002.
[19] L. Wang, Model Predictive Control System Design and
ImplementationUsing MATLAB. New York: Springer-Verlag, 2009.
[20] G. F. Franklin, Feedback Control of Dynamic Systems, 3rd
ed. Reading,MA: Addison-Wesley, 1994.
[21] K. K. Leang and S. Devasia, Design of
hysteresis-compensating itera-tive learning control for
piezo-positioners: Application to atomic forcemicroscopes,
Mechatronics, vol. 16, no. 34, pp. 141158, 2006.
[22] B. S. Kim, J. Li, and T. C. Tsao, Two-parameter robust
repetitive controlwithapplication to a novel dual-stage actuator
for noncircular machining,IEEE/ASME Trans. Mechatronics, vol. 9,
no. 4, pp. 644652, Dec. 2004.
[23] Y. M. Li andQ. S. Xu,Developmentand assessment of a novel
decoupledXY parallel micropositioning platform, IEEE/ASME Trans.
Mechatron-ics, vol. 15, no. 1, pp. 125135, Feb. 2010.
[24] C. X. Hu, B. Yao, and Q.F. Wang,Coordinatedadaptive robust
contouringcontroller design for an industrial biaxial precision
gantry, IEEE/ASMETrans. Mechatronics, vol. 15, no. 5, pp. 728735,
Oct. 2010.
[25] M. Tomizuka, T. C. Tsao, and K.K. Chew, Analysis and
synthesis ofdiscrete-time repetitive controllers, Trans. ASME, J.
Dyn. Syst., Meas.,Contr., vol. 111, pp. 353358, 1989.
[26] B. A. Francis andW. M.Wohnam, The internal modelprinciple
of controltheory, Automatica, vol. 12, pp. 457465, 1976.
[27] M. Tomizuka, Zero phase error tracking algorithm for
digital control,Trans. ASME, J. Dyn. Syst., Meas., Contr. , vol.
109, no. 2, pp. 6568,1987.
[28] S. Devasia, E. Eleftheriou, and S. O. R. Moheimani, A
survey of controlissues in nanopositioning, IEEE Trans. Control
Syst. Technol., vol. 15,no. 5, pp. 802823, Sep. 2007.
[29] M. Al Janaideh, S. Rakheja, andC. Su, Ananalytical
generalized PrandtlIshlinskii model inversion for hysteresis
compensation in microposition-ing control, IEEE/ASME Trans.
Mechatronics, [Online]. Available:http://ieeexplore.ieee.org, DOI:
10.1109/TMECH.2010.2052366.
[30] J. A. Yi, S. Chang, and Y. T. Shen,
Disturbance-observer-based hys-teresis compensation for
piezoelectric actuators, IEEE/ASME Trans.Mechatronics, vol. 14, no.
4, pp. 456464, Aug. 2009.
[31] U. X. Tan, W. T. Latt, C. Y. Shee, C. N. Riviere, and W. T.
Ang,Feedforward controller of ill-conditioned hysteresis using
singularity-free Prandtl-Ishlinskii model, IEEE/ASME Trans.
Mechatronics, vol. 14,no. 5, pp. 598605, Oct. 2009.
[32] K. Kuhnen and H. Janocha, Inverse feedforward controller
for complexhysteretic nonlinearities in smart-material systems,
Control Intell. Syst.,vol. 29, no. 3, pp. 7483, 2001.
[33] L. Ljung, System Identification: Theory for the User.
Englewood Cliffs,NJ: Prentice-Hall, 1987.
[34] G. C. Goodwin, M. Seron, and J. De Dona, Constrained
Control andEstimation: An Optimisation Approach. New York:
Springer-Verlag,2004.
[35] Y. C. Liu, Model predictive control with application to
precision mecha-tronic servo systems, M.S. thesis, Dept. Mech.
Eng., Natl. Taiwan Univ.Sci. Tech., Taipei, Taiwan, 2010 (in
Chinese).
[36] A. Zhengand M.Morari, Stability of modelpredictive control
with mixedconstraints, IEEE Trans. Autom. Contr., vol. 40, no. 10,
pp. 18181323,Oct. 1995.
[37] E. Zafiriou and H. W. Chiou, Output constraint softening
forSISO modelpredictive control, in Proc. Amer. Control Conf.,
1993, pp. 372376.
[38] M. V. Kothare, V. Balakrishnan, and M. Morari, Robust
constrainedmodel predictive control using linear matrix
inequalities, Automatica,vol. 32, no. 10, pp. 13611379, 1996.
[39] H. Chen and C. W. Scherer, An LMI based model predictive
controlscheme with guaranteed H performance and its application to
activesuspension, in Proc. Amer. Control Conf., 2004, pp.
14871492.
[40] K. V. Ling, S. P. Yue,and J. M. Maciejowski, A FPGA
implementationofmodel predictive control, in Proc. Amer. Control
Conf., 2006, pp. 19301935.
[41] M. H. Montazeri, M. Mahramian, andH. Taheri, A hardware
architectureof model predictive control for a real-time scheduling
algorithm, in Proc.Int. Conf. Future Netw. (ICFN), 2009, pp.
6973.
[42] L. G. Bleris and M. V. Kothare, Implementation of model
predictivecontrol for glucose regulation on a general purpose
microprocessor, inProc. IEEE Conf. Decis. Control Eur. Contr.
Conf., 2005, pp. 51625167.
[43] K. S. Lee, I. S. Chin, and H. J. Lee, Model predictive
control techniquecombined with iterative learning for batch
processes, AIChE J., vol. 45,no. 10, pp. 21752187, 1999.
[44] A. Draeger, S. Engell, and H. Ranke, Model predictive
control usingneural networks, IEEE Control Syst. Mag., vol. 15, no.
5, pp. 6166,Oct. 1995.
[45] E. F. Camacho and M. Berenguel, Robust adaptive model
predictivecontrol of a solar plant with bounded uncertainties, Int.
J. AdaptiveControl Signal Process., vol. 11, no. 4, pp. 311325,
1997.
[46] L. G. Bleris, J. Garcia, M. V. Kothare, and M. G. Arnold,
Towardsembedded model predictive control for System-on-a-Chip
applications,J. Process Control, vol. 16, no. 3, pp. 255264,
2006.
Chi-Ying Lin received the B.S. and M.S. degreesfrom National
Taiwan University, Taipei, Taiwan, in1999 and 2001, respectively,
and the Ph.D. degreefrom the University of California, Los Angeles,
in2008, all in mechanical engineering.
He is currently an Assistant Professor in the De-partment of
Mechanical Engineering, National Tai-wan University of Science and
Technology, Taiwan.His current research interests include design
and con-trol of precision positioning systems, active vibration
control, and mechatronics.
Yen-Chung Liu received the B.S. degree fromNational Yunlin
University of Science and Tech-nology, Yunlin, Taiwan, in 2008, and
the M.S. de-gree from National Taiwan University of Science
andTechnology, Taipei, Taiwan, in 2010, bothin mechan-ical
engineering.
He is currently an R&D Engineer withInternational Games
System Co., Ltd., Taipei,
Taiwan. His research interestsincludemechanism de-sign for game
products and model predictive controlfor mechatronic systems.