Charell Codner, Rollan Buddy Haller, Hazel Madolid and My-Linh
Truong Group 17 *Sponsored by UCF Center for Entrepreneurship &
Innovation
Slide 2
Project Description Stereo systems are too hefty to haul around
and MP3 players simply do not have the personality. The Musical
Robot Companion (MRC) is a creative expansion on these developed
technologies. As suggested by its name, the MRC has the capability
of playing music while following the user around.
Slide 3
Key Design Objectives
Slide 4
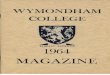
Block Diagram
Slide 5
Slide 6
Goals of Voice-Control Subsystem High accuracy -> Voice
control is a key feature in the MRCs design Adequate vocabulary
size (9 command words + 1 passphrase) Speaker independence
Continuous listening Easy to interface and program Cheap
Slide 7
Speech Recognition Chips VR Stamp RSC-4128 microprocessor
Speaker Independent and Speaker Dependent capabilities Speaker
Verification Continuous listening Allows sets up to 12 words
maximum without build limits Low power requirements (2.70V 3.6V)
Development tools Speech recording and playback Voice Direct
RSC-356 microprocessor Continuous listening Speaker Dependent
Recognizes 60 words/phrases in slave mode,15 in stand-alone mode 8
outputs Up to 99% accuracy achievable HM 2007 Chip Speaker
Dependent Isolated Word recognition Recognized up to 40 user
programmable words Accuracy greater than 95% Can be used in manual
or CPU mode Easy interfacing with other circuits 5 V power
supply
Slide 8
Training the HM2007 We will not be using the demo board that
can be purchased from the manufacturer, instead we will be
designing our own The user menu on the MRCs display will have an
option to train the command words. The output from the display to
the microcontroller will be relative to the selected word to train,
and the microcontroller will output the corresponding bit pattern
to the HM2007 chip Interfacing circuit design will be similar to
that described in the manual Each command word will be trained to
four separate memory locations
Slide 9
Communication Bit Patterns
Slide 10
Voice Command Recognition Algorithm
Slide 11
SPEAKERS
Slide 12
Speakers Speakers need to be loud enough to hear Have excellent
frequency response Durable enough for movement and other activities
Not overly large 3 Types: Subwoofer, Mid-range, and Tweeters
Slide 13
Speakers: Subwoofer Speaker Specifications of the LAT-250
Impedance44 Max Power Input100 W Frequency Range20-160 Hz Sound
Pressure Level @ 1 W91 dB Wattage Designed For10 W Frequency Range
Designed For20 Hz 160 Hz
Slide 14
Speakers: Midrange Speaker Specifications of the Eminence
Alpha-6 Impedance44 Max Power Input100w Frequency Range150 Hz - 6
kHz Sound Pressure Level @ 1 W91 dB Wattage Designed For7.5 W
Frequency Range Designed For160 Hz 6 kHz
Slide 15
Speakers: Tweeters Speaker Specifications of the SB25STC
Impedance4 Max Power Input120 W Frequency Range3 kHz 22 kHz Sound
Pressure Level @ 1 W91 dB Wattage Designed For7.5 W Frequency Range
Designed For6 kHz 22 kHz
Slide 16
Amplification and Filtering A special topology was used, called
the CGIC circuit. Allows for superior sensitivity to component
values. Functionally tunable.
Slide 17
Amplification and Filtering Needed a GBP that was above 100
kHz. Also needed to be able to handle a large voltage swing.
Ideally multiple op- amps on a single board. The LT1058CN was
chosen. Specifications of the LT1058 GBP5 Mhz Max Voltage+/- 20V
Max Output Current2.8 mA Number of Amplifiers4
Slide 18
Amplification and Filtering Final output stage required special
powerful op-amp. Little amplification was used to allow for a lower
GBP. The OPA541 was chosen. Final output power determined by MP3
and FM chips. Specifications of the OPA541 GBP1 Mhz Max Voltage+/-
60V Max Output Current5 A Number of Amplifiers1
Slide 19
Amplification and Filtering Needed to pick special cross-over
points for speakers. Then needed to use the filtering circuit to
create these cross over-points. In the end designed for 120 dB 6 th
order filters.
Slide 20
MP3 DECODER
Slide 21
Mp3 Decoder Needed to be controlled by I2C. Needed to be able
to read SD cards. Ideally as little programming as possible.
Ability to output analog signals ideal.
Slide 22
FM RADIO CHIPSET
Slide 23
FM Radio Chip Radio is a standard in portable music player
industry Adds functionality and marketability Original design
included FM and AM radio Initial research showed most joint AM/FM
radio chips broadcasted in mono based only Difficult to find joint
AM/FM radio chip in stereo Decided to stream FM only to emphasize
speakers dynamic range Optional: build AM radio input with external
circuitry
Slide 24
SI Lab 336-1740-ND I 2 C interface control Output analog
signals Internal DSP Tuning controlled digitally; ease of use
Antenna range needs to be 87- 108 MHz based on US FM Radio
standards
Slide 25
FM Radio Schematic
Slide 26
DISPLAY
Slide 27
Display Specifications SPI interface Large viewing screen Text
and graphic display RGB to enhance viewing Display will be viewed
in sunlight & ambient light Looked at LCDs and OLEDs LCD was
more cost effective Readability Polarization Reflective Low power
draw, no backlight, no SPI Transmissive high color contrast, best
in ambient light; RGB & SPI readily available Transflective
Combo of Reflective & Transmissive; ideal in both bright &
low light
Slide 28
Color Graphic Display Specifications for Solomon SSD2119
CFAF320240F-T-TS Display TypeRGB graphics InterfaceSPI
PolarizerTransmissive View Direction12:00 Backlight ColorWhite
Input Voltage1.4V to 3.6 V Current Drain Per Pin25 mA
Slide 29
Monochrome Text Display Specifications for CFA632-YFB-KS
Display TypeMonochrome InterfaceSPI PolarizerTransflective View
Direction6:00 (rotate 180) Backlight ColorYellow-Green Supply
Voltage4.75 V to 5.25 V Overall Current (100% backlight) 380
mA
Slide 30
Schematic for the Displays
Slide 31
Slide 32
Goals of Tracking Subsystem Actually the composition of two
systems: user tracking and obstacle avoidance Detect and track the
user in order to follow them Detect and avoid objects it encounters
while in motion for autonomous movement Function well both indoors
and outdoors Cost effective Small Low power
Slide 33
Sensors User Tracking: Combination of a user- carried IR beacon
and phototransistors OED-EL-1L2 (LED) Peak wavelength is 940 nm
Radiant intensity is 60 mW/SR Half angle is 30 degrees (60 degree
beam angle) Lens finish is Water clear LTR-301 (Sensor) High
sensitivity Peak wavelength 940 nm Viewing angle is 20 degrees
Operating voltage is 5 V Lens color is clear transparent Obstacle
Avoidance: Ultrasonic sensors URM V3.2 Ultrasonic Sensor Detection
range of 4 cm 500 cm (5 m) Interface RS232 (TTL), PWN Lightweight
(30 g) 5 V power 1 cm resolution Operating modes: Serial (PWM)
passive control mode, Autonomous mode, On/Off mode
Slide 34
Transmitter Beacon Multiple LEDs and a lens will be used to
help increase the beams radiant intensity Lens will also help to
focus the light beam and counter some of the outside noise from
other light sources. Pulsing the circuit has other benefits in
addition to filtering; it increases the instantaneous intensity of
the LED and may also help improve battery life.
Slide 35
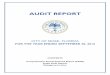
Beacon Sensor Infrared sensors will collect readings on whether
or not they can detect the beacon carried by the user The distance
gap allowed between the MRC and the user in following mode may
range from 2 feet to 7 feet so therefore the beacon should be able
to transmit and be received at a distance of 9 feet (3 meters)
Readings will be used to determined the users location relative the
a virtual map
Slide 36
Sensor Placement (Virtual Map)
Slide 37
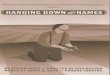
Obstacle Avoidance Subsystem Sensors will be used in autonomous
mode The sensors will periodically take a reading and compare it
with the pre-set threshold value. The threshold value will be set
to 153 centimeters (2.54 cm = 1 in; 152.4 cm = 60 in) Readings that
are taken will compared to the threshold value Reading is less than
or equal to the threshold value The sensor will output that it has
detected an object and the MRC should take necessary actions to
avoid it. The goal is to detect objects and not have the MRC come
within 61cm (about 2 feet) of the detected objects Objects within
the threshold detection range but outside of the avoidance range
will serve as a caution but not cause the MRC to stop. This data
will be useful when decide whether or not the MRC can turn to try
to maneuver around and object Object detection should be at least
180 degrees in front of the MRC
Slide 38
Sensor Placement Placement Design for the Ultrasonic
Sensors
Slide 39
MICROCONTROLLERS
Slide 40
Microcontrollers Needed to be able to handle processes. Variety
of I/O ports. Fast enough to handle display. Large memory ideal.
PIC 18F87J10 chosen.
Slide 41
Microcontrollers Specs PIC 18F87J10 Specifications Operating
Voltage3.3 V I/O Voltage0 V 5 V Clock Speed40 MHz A/D resolution 10
bits or 1024 divisions over input voltage range. Sample Rate of
A/DAt worst 3333 samples/sec. Number of I/O ports66 Program Memory
(Flash)128 kB Program RAM onboard3936 bytes External Memory BusYes
Programming InterfaceICSP
Slide 42
Software: Master MC
Slide 43
Software: Display MC
Slide 44
Menus
Slide 45
POWER SUPPLY
Slide 46
Power Supply Needed to be able to supply 24v, 5v, and 3.3v.
High power output for the speakers and motors. Be powered by a 12v
battery for efficiency. Ideally, tolerant for voltage surge from
motor start-up. Be efficient as possible. High Frequency switching
for noise considerations. Battery needed to have high capacity,
high power draw. Used Power Supply Workbench by National
Semiconductor.
Slide 47
Power Supply: Battery Car Battery Specifications Voltage12 V
Max Discharge RateOver 100 A Capacity~720 watt-hrs Min. Run Time4
hrs
Slide 48
Power Supply: 24v Specifications of 24 V Railings Input Voltage
Min10.5 V Input Voltage Max15 V Output Voltage24 V Output Current
Max (Steady)3.5 A Output Power Max (Steady)84 W Output Surge
Current10.3 A Output Power Max (Surge)247 W Average
Efficiency94.3%
Slide 49
Power Supply: 5v Specifications of 5 V Railing Input Voltage
Min10.5 V Input Voltage Max15 V Output Voltage5 V Output Current
Max (Steady)4 A Output Power Max (Steady)20 W Output Surge
Current5.92 A Output Power Max (Surge)29.6W Average
Efficiency93.4%
Slide 50
Power Supply: 3.3v Specifications of 3.3 V Railing Input
Voltage Min10.5 V Input Voltage Max15 V Output Voltage3.3 V Output
Current Max (Steady)4 A Output Power Max (Steady)13.2 W Output
Surge Current10.7 A Output Power Max (Surge)35.3 W Average
Efficiency94.4%
Slide 51
MOTORS/WHEELS
Slide 52
Motors/Wheels Needed to be able to propel the MRC. Easy to
control. Preferably DC powered. Ideally be able to keep up with a
human walking. Tank steering will be used.
Slide 53
Motors Motor Specifications Max Load250 lbs Power Input60 W
Operating Voltage24 V Max Speed4 MPH
Slide 54
Wheels Rotation Rate = 131 RPM Torque = 33.33 ft * lbs Wheel
diameter = 8 in
Slide 55
EXTERIOR
Slide 56
Exterior The MRC will have a wood frame. The MRC will have
aluminum or another similarly easy to work with material. It will
have two arms that swing out to allow for stereo channel
seperation. Overall, similar in size to a wagon.
Slide 57
Slide 58
Hardware Testing Each system will have it own testing
procedure. First, electrical connections and power on will be
tested. Next, operation will be checked. Finally, functional tuning
will be done. Functional Tuning Procedure Example Low-Pass Filters
Input Part Adjusted Value Changed Measured Value Needed Measurement
Sin( 0 t)R4R4 00 |H( 0 )|2 Sin( 0 t)R8R8 QpQp Phase of V in V out
-90
Slide 59
Software Testing Modified Top-Down Approach Top level: The main
microcontroller will be tested first Functionality of communication
connections using the SPI and I 2 C data buses must be verified
Middle level: The display microcontroller, MP3 decoder, and FM
radio will be interfaced and tested (each done separately) The
functionality of each component will be verified Bottom level: The
voice chip, microphone, sensors, speakers, and display screens will
be tested (each done separately) Voice Subsystem First it must be
verified that it can receive training mode instructions Then the
voice control algorithms can be tested after the chip has been
trained Tracking Subsystem The responses generated by the input
from signaling the IR sensors with the beacon will be analyzed
separately from the responses generated by the input from signaling
the ultrasonic sensors. Once both sensor algorithms have been
tested and function correctly separately they will be tested again,
working together. Finally all components will be connected and
tested together
Slide 60
Slide 61
Sponsorship Sponsorship provided by the UCF Center for
Entrepreneurship and Innovation (CEI) Awarded $2000 Must compete at
the Innovation Competition, hosted by CEI, on March 26, 2010