Embed Size (px)
Citation preview

Characteristic Analysis on Land for an Amphibious Spherical Robot
Fu Wan1, Shuxiang Guo1,2 Xu Ma1, Yuehui Ji1 and Yunliang Wang1 1 Tianjin Key Laboratory for Control Theory & Applications
in Complicated System and Biomedical Robot Laboratory 2 Intelligent Mech. Systems Eng. Depart.
Tianjin University of Technology Kagawa University Binshui Xidao Extension 391, Tianjin,300384,China 2217-20, Hayashi-cho, Takamatsu, 761-0396, Japan
[email protected] [email protected] Abstract –In recent years, all kinds of underwater robot have been developed owing to having been widely used in narrow pipelines, underwater detection or complicated underwater spaces full with reefs. An amphibious spherical robot is presented in the paper. The paper has focused on characteristic analysis on land for an amphibious spherical robot. An amphibious spherical robot includes a circular acrylic plate, a sealed hemispheroid and four drive units. Each of them consists of a water-jet propeller and two servo motors. The rotation angle of the servo motor can be changed by adjusting the duty ratio of the motor. A variety of sports gait can be achieved by adjusting the robot's leg movement sequence. Meanwhile, crawling gait and trotting gait experiments have been carried out for evaluating the performance of the amphibious spherical robot on tile floor and brick floor. From the experiment results, the robot has a higher walking speed on tile floor. Besides, the speed of walking robot will increase with the increase of frequency. When the frequency is lower than 2HZ, the maximum speed of robot can reach 6.67cm/s. Experiments proved that it is feasible to study performance evaluation for robot. The study of gait analysis is the research foundation for amphibious spherical robot. Key words –Amphibious Spherical Robot, Actuating System, Gait Analysis, Evaluation Performance
I. INTRODUCTION
Underwater robots have broad application prospects such as pipeline cleaning, submarine topography survey and samples collection in recent years. At present, underwater vehicles can mainly be included remote operated underwater vehicles (ROVs) and autonomous underwater vehicles (AUVs). In 1996, Aarne Halme developed the first spherical motion mechanism, that is, the spherical mobile robot. The reason that driving unit of spherical robot can be scrolled, in case of avoid destroying the shell balance installed in the shell. The spherical robot was designed to act as a small platform to carry sensor devices or actuators in an environment [1]. The University of Hawaii Autonomous Systems Laboratory developed underwater robot, which is a spherical underwater robot. The spherical underwater robot is mainly used for monitoring the water environment and underwater operations and so on. And then the laboratory developed several prototype versions of the ODIN, which has eight propellers, sonar sensors, pressure sensors and inertial navigation system. The diameter of the robot and quality were 0.64 m, 126 kilograms [2], [3].
In 2000, the Spanish URIS, underwater robot was developed by University of Groningen. Robot is 0.35 meters in diameter. The air quality is 30kg, which can withstand the pressure of 30 meters deep. The sphere of the lateral is equipped with a front view and the audience view video camera equipped with a pressure container. The driving device of underwater robot consists of four propellers. The robot could carry out four degrees of freedom of movement such as surge, sway, heave and yaw [4].
In 2010, Institute of electrical and electronic engineering at the University of Manchester began to devote to studying a spherical underwater robot [5], [6]. In 2011, Simon A. Watson and Peter N. Green et al. developed a small autonomous underwater robot, which is MKV with having four degrees of freedom. The diameter of the sphere is 0.15 meter. The propulsion system used six propellers. The spherical robot was used for preventing leakage in order to monitor nuclear leakage and sewage treatment facilities. With the improvement of mechanical design, the team begins to improve underwater movement stability and reliability of the spherical robot motion control research [7]-[9].
Some kinds of robots have been developed by Kagawa University (Guo Lab.) in recent years. Robots can be divided into two kinds of underwater spherical robot and amphibious spherical robots. A spherical underwater vehicle used three vectored water-jet propulsion. The robot can realize floating upward and diving movement. The spherical hull of the SUR-II focused on characteristics of the water-jet thruster [10]-[14]. At same time, some kinds of amphibious spherical robot have been developed. The amphibious spherical robot included four water-jet propellers and eight servo motors, which could carry out walking on land and moving in the water. A mother-son multi-robots cooperation system is proposed, named GSL system, which can carry several microrobots as son robots using ICPF actuators, which have advantages of low voltage driving, low noise and no pollution [15]-[19]. The son robots can be achieved to grasp the small object at any surface and can easily cross ditches and other obstacles, the action of the different control signals can be realized with the multi-degree-of-freedom mobile [20]-[23].
The spherical robot research in china has also been attention. In 2006, Harbin Institute of Technology developed a spherical robot, which had introduced the dynamic equation. A nonlinear affine system is derived based on energy dissipation Lagrange Equation. The spherical robot rolled

forward rapidly to form a stable platform for implementing the observation mission [24]. Beijing University of Posts and Telecommunications developed a new type of built-in posture adjusting mechanism of underwater spherical robot, which has been called BYSQ-2. In addition, the dynamics of the robot have been analyzed [25].
Although these robots have some advantages, for instance, they can implement walking on land and moving in the underwater environment, most of robots did not consider characteristic analysis on Land. In order to improve the performance of the amphibious spherical robot, it is necessary to study the properties of the robot on land.
The paper is organized as follows. Some relative research about underwater robots is introduced first in section I. Structure design of an amphibious spherical robot is showed respectively in section II. Gait Analysis of amphibious spherical robot is introduced in section III. Forward kinematics for the robot system is provided in section IV. Experiments are carried out for evaluating amphibious spherical robot in section IV. The last section presents conclusions and future work.
II. STRUCTURE DESIGN OF AMPHIBIOUS SPHERICAL ROBOT
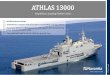
In order to adapt to complex environment, an amphibious spherical robot was designed not only to walk on land but also to move under the water. An amphibious spherical robot can realize more degrees of freedom movement with utilizing actuator units, when robot walks on the land. Implementing degrees of freedom movement is advantageous to the robot for various operating tasks such as tracking, carrying object. A. Proposed Spherical Robot Structure The proposed amphibious spherical robot is shown as in Fig. 1. Robot is composed of a circular acrylic, plate, a sealed transparent hemispheroid and four actuating units.
Fig. 1 Structure of proposed spherical robot
Each unit consists of a water-jet propeller and two servo motors. They are perpendicular. The amphibious spherical robot can float up and float down depends on water-jet propeller. In addition, by adjusting the hydraulic propeller thrust can not only change the speed of the robot, but also help the robot underwater operation. In order to prevent leakage, control unit, level sensor and batteries are installed in the sealed hemispheroid. The diameter of the upper hemisphere is 250 mm. B. System Actuating The mechanisms of the actuating system are shown as in Fig. 2. The amphibious spherical robot can walk on land by using four actuators and move utilizing four thrusters under water. The actuating system includes four actuating units. Each of them consists of a water jet propeller, a steering gear bracket and two servo motors. The length and the width of U type steering gear bracket are 64.5cm, 56cm respectively. The height and length of actuating unit in standing state is 110mm, 105mm. The motor is controlled to move utilizing the PWM signals in horizontal direction. The servo motor can rotate 180° . In addition, another motor fixed on the water-jet thruster is controlled to move in vertical direction. Two degrees of freedom movement can be implemented by each actuating unit with using servo motors. As the walking motion on land, actuating units are used as actuator legs, each of which has two degrees of freedom. Four driving leg constitutes the quadruped robot. The robot can realize walking and rotating motions on land by adjusting the PWM signals. When the amphibious spherical robot can move due to water jet propellers under the water, producing thrust can make the robot move. By controlling PWM signals of the servo motors, spray angle of each water- jet propeller can be altered to implement multi-degree freedom such as moving forward, rotating, floating up and floating down motions.
Fig. 2 The actuating system
Φ250mm
1 2
3 4
Servo motor
Water-jet propeller
Servo motor
Sealed transparent hemispheroid
Circular acrylic
Steering gear

The amphibious spherical robot has four actuating unit, each of which includes two servo motors. Here we used the Hitec HS-5646WP servo motors (Fig. 3), which can rotate 180 degrees in the max. The servo motor is 41.8mm in length, 21mm in width, 40mm in height. When the voltage on both ends of the servo motor is 7.4v, the servo motor can provide a maximum torch of 12.9kg*cm and have good waterproof function. This mini bow thruster (Fig. 4) is equipped with an electric motor type 100. The propulsion is provided by a 4-bladed paddle wheel sucking in water on one side and expelling it through the jet nozzles very effectively at high pressure. The motor is sealed with a G-ring and an O-ring thereby ensuring a good seal. The water-jet motor is sized 21*31*56mm with nozzles.
Fig. 3 The servo motor
Fig. 4 Picture of water-jet motor
The prototype of an amphibious spherical robot (Fig. 5) is consisted of actuating units (Fig. 2). Completely symmetrical structure is adopted by the robot can easy to control the robot's movement because the center of mass is in the center of the amphibious spherical robot.
Fig. 5 Equipped actuating system and a circular plate
C. Control system The block diagram of the control system is shown as in Fig. 6. An AVR micro unit is used as the CPU of the system for amphibious spherical robot, which generates 10 channels of PWM signal to control servo motors with the four actuating units. In addition, it can change the state of the robot. In order to adapt to underwater environment, another 4 channels of PWM signal together with 4 channels of general I/O output were utilized to control the 4 water-jet motors. By adjusting the PWM signal, we can change both the direction and the size of water-jet thruster. Level sensor is used to control the amphibious spherical robot
Fig. 6 Diagram block of control system
The controller of the amphibious spherical robot is AVR ATMEGA2560 (Fig. 7). Eight channels of PWM signals are used to control the servo motors on the legs to actuate the robot walk. Eight Input/output ports are used to control four water-jet propellers for positive rotating and negative rotating motions. Another 4 channels of PWM signal are utilized to control the water-jet thrusters. By adjusting the duty ratio of PWM signal can change the size of the thrust.
Fig. 7 Prototype control system
For the power supply, we use two LI-PO batteries (Fig. 8). Battery capacity is 5000amh. The voltage of the battery is 7.4V. The battery is 142mm in length, 48mm in width, 17mm in height and the weight is about 330g. One is for providing the power to AVR micro-controller and eight servo motors, another of which, are used to provide the power to four water-jet propellers. Voltage regulator module is used as steady voltage (Fig. 8).
Fig. 8 Picture of battery and voltage regulator module
Leg1
Leg4 Leg2
Leg3
A circular plate
32mm
56mm
41mm
Battery Voltage regulator
41.8mm
21mm
40mm
ATMEGA2560

III. GAIT ANALYSIS OF AMPHIBIOUS SPHERICAL ROBOT A. Prototype Amphibious Spherical Robot
Figure 9 shows the prototype amphibious spherical robot, which includes two quarter spherical hulls, four actuating legs with two DOFs and one circular acrylic plate. The thickness of one circular acrylic plate was 4mm, and also had enough good robustness. Waterproof work is an essential to realize the underwater motion. When the robot walks on land, nozzle of water-jet propeller is used as the robot's leg. In order to reduce the influence of the ground to the nozzle impact, we must take into consideration the contact force of quadruped robot.
Fig. 9 Prototype spherical robot structure
B. Crawling Gait The gait is that has order switch between swing leg and supporting leg. The swing leg indicates the legs off the ground. The supporting leg phase indicates which the leg contacts the ground. T refers that one leg finish motion during one complete cycle time. Cycle gait refers that each leg has the same cycle of movement, and any leg movement cycle does not change with time.
Tt pi
i =β (1)
where βi is the duty ratio of robot, tpi means time that leg i contacts with ground. When βi =β, i=1, 2, …, 2k (2k is the sum of legs for the robot),so the gait called regular gait. In order to adapt to different environments, the spherical robot could implement two kinds of walking gaits motion by adjusting the control unit.
Fig. 10 Crawling gait (Crawl gait with duty factor β=0.75)
0 indicates that legs contact with ground and 1 indicates that legs rise.
Crawling gait is shown as in Fig. 10. Duty factor of crawling gait is β=0.75. 0 indicates that legs contact with ground and 1 indicates that legs are in the air. Considering the stability of the robot, most of the quadruped robot adopts the crawling gait. However, the walk speed is relatively slow. The
first walking gait is a statically stable regular symmetric gait, and has one leg in the swing phase, the remaining three legs in the support phase, and the rotation of the gait at all times in a certain order. C. Trotting Gait Trotting gait is shown as in Fig. 11. The speed of trotting gait can move faster than the speed of crawling gait. Accordingly, the duty factor β defined the gait event sequences and the gait timing sequences. Diagonal legs always have the same state, and the other two legs are contrary to their state at all times.
Fig. 11 Trotting gait (Trot gait with duty factor β=0.5)
0 indicates that legs contact with ground and 1 indicates that legs rise.
IV. EXPERIMENTAL RESULTS
In order to make the robot implement practical applications, plenty of experiments for the spherical robot have been carried out in different terrains such as tile floor, brick roads. Because of these terrains varies with friction coefficient and roughness, it is necessary and very significant for evaluating the adaptability on these environments. A. Experiment on the Tile Floor Walking experiments on tile floor were shown as in Fig. 12. In order to evaluating the performance on-land of the amphibious spherical robot, we implemented two gait experiments with duty factor of 0.75 and 0.5 respectively for amphibious spherical robot. However, control strategies of the robot are basically the same.
Fig. 12 Walking experiments on the tile floor
B. Experiment on the Brick Floor Walking experiments on tile floor were shown as in Fig. 13. Crawling gait and trotting gait experiments have been carried out.
Top view Left view
Tile floor

Fig. 13 Walking experiments on the brick floor
C. Experiment Results
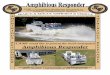
Walking experiments on tile floor are shown as in Fig. 14. The vertical axis stands for walking velocity, and the horizontal axis stands for frequency. For evaluating the on-land performance, walking velocity of the robot was calculated under different frequency for different gaits. The green line describes the speed of crawl gait, and also purple line draw the speed of trot gait. From the graphs showing with the frequency increasing, the walking velocity will increase in a certain range. The walking velocity of robot is in inverse proportion to the frequency, when the frequency is than 2Hz. While under a relatively high frequency, walking velocity increases by changing the gait from crawl gait to trot gait. Under the low frequency, the trot gait is faster than crawl gait of the robot. When the frequency of the trot gait is1.25HZ,the maximum walking velocity of robot is 6.67cm/s.
Fig. 14 Walking experiments on tile floor
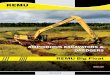
Fig. 15 Walking experiments on brick floor
The experimental results on brick floor were shown as in Fig. 15. As the brick floor is a rough ground, robot is walking slower than on the other grounds. From Fig.14, we know that under a low frequency the walking velocities of the robot are almost the same on two kinds of grounds. When the frequency of amphibious spherical robot is greater than 5-6HZ, the walking velocity can become zero. In order to analyze the characteristic on land of amphibious spherical robot, experiments have been carried out. The experimental results among different terrains found that under a low frequency the walking velocities of the robot are proportional to the frequency, while under a high frequency walking velocity increases. The walking velocity is in inverse proportion to the frequency, when the frequency exceed than 1-2HZ.
Ⅴ. CONCLUSIONS AND FUTURE WORK
In the paper, an amphibious spherical robot which included a circular acrylic plate, a sealed hemispheroid and actuating unit was presented. Gait Analysis was necessary and essential to obtain properties of the amphibious spherical robot. This paper aimed at setting up characteristic analysis on land for an amphibious spherical robot. The following conclusions can be drawn: 1) An amphibious spherical robot was presented, which can implement switch between water-jet mode and quadruped walking mode. In addition, the amphibious spherical robot can finish multi-degree freedom. 2) The characteristic analysis on land of an amphibious spherical robot has been set up. The gait of the robot was changed by adjusting the duty ratio of the robot. 3) Gait Analysis experiments had been carried out on tile floor and brick floor. Experiment results proved that robot could move faster on the tile floor than brick floor. In low frequency, the speed of robot also got faster with the increase of frequency. 4) When the frequency of the trot gait on the tile floor is 1.25HZ,the maximum walking velocity of robot is 6.67cm/s. In order to implement obstacle avoidance, sensors will be applied to the robot. After that, the stability of the robot using higher-order synovial control theory should take into consideration in the future.
ACKNOWLEDGMENT
This research is supported by Tianjin Key Research Program of Application Foundation and Advanced Technology (13JCZDJC26200).
REFERENCES [1] Aarne Halme, Torsten Schonberg, Yan Wang, “Motion control of a
spherical mobile robot”, Proceedings of the 1996 4th International Workshop on Advanced Motion Control, Vol.1, pp. 259-264, 1996.
[2] S.K. Choi, J Yuh, “Experimental study on a learning control system with bound estimation for underwater robots”, Autonomous Robots, Vol.3, No.2-3, pp.187-194, 1996.
[3] S.K. Choi, G.Y. Takashige, J. Yuh, “Experimental study on advanced underwater robot control”, Proceedings of the 1994 IEEE Symposium on Autonomous Underwater Vehicle Technology, Vol.21, No.4, pp.695-703, 2005.
Brick floor

[4] M.Carreras, A.Tiano, A. El-Fakdi, A. Zirilli, et al. “On the identification of non-linear models of unmanned underwater vehicles”, Control engineering practice, Vol.12, No.12, 1483-1499, 2004.
[5] Simon A. Watson, Peter N. Green, “Design considerations for micro-autonomous underwater vehicles (μAUVs)”, Proceedings of the 2010 IEEE Conference on Robotics Automation and Mechatronics, pp. 429-434, 2010.
[6] Simon A. Watson, Peter N. Green, “Propulsion systems for micro-autonomous underwater vehicles (μAUVs)”, Proceedings of the 2010 IEEE Conference on Robotics Automation and Mechatronics, pp. 435-440, 2010.
[7] Simon A. Watson, Dominic J. P. Crutchley, Peter N. Green, “The design and technical challenges of a micro-autonomous underwater vehicle (μAUV)”, Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, pp. 567-572, 2011.
[8] Simon A. Watson, Peter N. Green, “A de-coupled vertical controller for micro-autonomous underwater vehicles (μAUVs)”, Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, pp. 561-566, 2011.
[9] Simon A. Watson, Dominic J. P. Crutchley, Peter N. Green, “The mechatronic design of a micro–autonomous underwater vehicle (µAUV)”, International Journal of Mechatronics and Automation, Vol.2, No.3, 157-168, 2012.
[10] Xichuan Lin, Shuxiang Guo, Yanling Hao, et al. “A simplified dynamics modeling of a spherical underwater vehicle”, Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, pp.1140-1145, 2008.
[11] Shuxiang Guo, Xichuan Lin, et al. “Development and control of avectored water-jet-based spherical underwater vehicle”, Proceedings of the 2010 IEEE International Conference on Information and Automation, pp.1341-1346, 2010.
[12] Xichuan Lin, Shuxiang Guo, et al. “Development of a spherical underwater robot”, Proceedings of the 2011 IEEE/ICME International Conference on Complex Medical Engineering, pp.662-665, 2011.
[13] Xichuan Lin, Shuxiang Guo, “Development of a spherical underwater robot equipped with multiple vectored water-jet-based thrusters”, Journal of Intelligent & Robotic Systems, Vol.67, No.3-4, pp.307-321, 2012.
[14] Chunfeng Yue, Shuxiang Guo, Liwei Shi, “Hydrodynamic analysis of thespherical underwater robot SUR-II”, International Journal of Advanced Robotic Systems, Vol.10, pp.1-12, 2013.
[15] Shuxiang Guo, Shilian Mao, Liwei Shi, et,al. “Development of an amphibious mother spherical robot used as the carrier for underwater microrobots”, Proceedings of the 2012 ICME International Conference on Complex Medical Engineering, pp.758-762, 2012.
[16] Liwei Shi, Yanlin He, Shuxiang Guo, “Skating motion analysis of the amphibious quadruped mother robot”, Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, pp.1749-1754, 2013.
[17] Shuxiang Guo, Shilian Mao, Liwei Shi, et al. “Design and Kinematic analysis of an amphibious spherical robot”, Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, pp.2214-2219, 2013.
[18] Chunfeng Yue, Shuxiang Guo, Maoxun Li, “ANSYS Fluent-based modeling and hydrodynamic analysis for a spherical underwater robot”, Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, pp.1577-1581, 2013.
[19] Liwei Shi, Shuxiang Guo, Shilian Mao, et al. “Development of an amphibious turtle-inspired spherical mother robot”, Journal of Bionic Engineering, Vol.10, No.4, pp.446-455 2013.
[20] Liwei Shi, Shuxiang Guo, Kinji Asaka, “A novel multifunctional underwater microrobot”, Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, pp.873-878, 2010.
[21] Shuxiang Guo, Liwei Shi, Kinji Asaka, “IPMC Actuator-based an Underwater Microrobot with 8 Legs”, Proceedings of 2008 IEEE International Conference on Mechatronics and Automation, pp.551-556, 2008.
[22] Shuxiang Guo, Maoxun Li, Liwei Shi, et al. “A Smart Actuator-based Underwater Microrobot with Two Motion Attitudes”, Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, pp.1675-1680, 2012.
[23] Shuxiang Guo, Fu Wan, Wei Wei, et al. “An underwater microrobot with six legs using ICPF actuators”, Proceedings of 2013 ICME International Conference on Complex Medical Engineering, pp.532-535, 2013.
[24] Ming Yue, Zongquan Deng, “Design of state feedback control system for spherical robot based on state observer”, Optics and Precision Engineering, Vol.5, No.6, pp.878-883, 2007.
[25] Xiaojuan Lan, Hanxu Sun, Qingxuan Jia, “Principle and dynamic analysis of a new-type spherical underwater vehicle”, Journal of Beijing University of Posts and Telecommunications,Vol.33, No.3, pp.20-23, 2010.