Embed Size (px)
Citation preview

Edge DetectionINEL 6088 - Fall 2011 - M. Toledo
Tuesday, September 13, 11

2
ideal
~real
Tuesday, September 13, 11

Edge point – point at which the local intensity changes significantly
Edge fragment – edge (point) and orientation
Edge detector – produces a set of edges (points or fragments)
Edge linking – orders a list of edges
Contour – list of edges
Edge following – searching the (input) image to determine contours
Tuesday, September 13, 11

4
Real image
Edge detector produces:• correct edges• false edges (false positives)• can miss edges (false negatives)
Tuesday, September 13, 11

5
Edge Detection using Gradient
G[f(x,y)]=[Gx Gy]T
Gx = δf/δx ≈ f[i,j+1]-f[i,j] « gradient at [i, j+½] Gy = δf/δy ≈ f[i+1,j]-f[i,j] « gradient at [i+½, j]
To get the gradient at the same point [i+½, j+½], use:
Simple way
Tuesday, September 13, 11

6
Steps:• filtering• enhancement• detection• sometimes, localization
Roberts: P5 = |P5 - P9| + |P8 – P6|
i
j
Sobel: C= mult. by 2
Prewitt: Sobel with c=1
Tuesday, September 13, 11

7
Filtered with 7x7 gaussian filter
Tuesday, September 13, 11

8
unfiltered
Tuesday, September 13, 11

9
Filtered, noisy
Tuesday, September 13, 11

10
Unfiltered, noisy
Tuesday, September 13, 11

11
Edge Detectors that use the Second Derivative
Change in sign
indicates edgeTwo ways:
• Laplacian• Second directional derivative
Tuesday, September 13, 11

12
Laplacian
Combined to get
Also used:
Tuesday, September 13, 11

13
Tuesday, September 13, 11

14
Tuesday, September 13, 11

15
Second directional derivative
n Second derivative computed in the direction of the gradient
n Implement using the formula:
Tuesday, September 13, 11

16
Laplacian of Gaussian (LoG)
Problem with Laplacian and second-derivative-operator: • very sensitive to noise• Small peaks in first derivative produce zero-crossing in the second derivative.
Solution: Filter out noise before edge enhancement
n Smoothing: Gaussian smoothingn Enhancement: Second-derivative edge enhancementn Detection: zero-crossing in the second derivative with a corresponding
large peak (i.e. above some threshold) in the first derivativen If desired, use linear interpolation to locate the edge with sub-pixel
resolution
Tuesday, September 13, 11

17
Mexican-hatOperator
The output of the LoG operator, h(x,y) is given by:
h(x, y) = r2[g(x, y) ? f(x, y)]
h(x, y) = [r2g(x, y)] ? f(x, y)
r2g(x, y) =
x
2+ y
2 � 2�
2
�
4exp
✓�x
2+ y
2
2�
2
◆
Tuesday, September 13, 11

18
Two ways of doing LoG:• Gaussian smoothing followed by laplacian• Convolution of image with a linear filter that is the laplacian of a gaussian filter
To obtain real edges, it might be necessary to combine information from filters of different sizes. The problem of combining edges obtained from different size operators still remains.
Tuesday, September 13, 11

19
Tuesday, September 13, 11

20
LoG ResultsSmoothing causes blurring large σ: better noise filtering but more blurring – can cause edge merging
By applying filters of different sizes and analyzing the results, better edge detection can be accomplished.
Tuesday, September 13, 11

21
An alternative approach is to fit a function to the image and then detect
the edges in the function…
Tuesday, September 13, 11

22
Facet model: fit a function only in the local neighborhood of each pixel.
Tuesday, September 13, 11

23
Example: bicubic polynomial
Tuesday, September 13, 11

24
Masks for computing the coefficients of the bicubic approximation.
Tuesday, September 13, 11

25
Tuesday, September 13, 11

26
The angle may be chosen to be the angle of the approximating
plane:
sin ✓ =
k3pk22 + k23
cos ✓ =
k2pk22 + k23
f
00✓ (x0, y0) = 2(3k7 cos
2✓ + 2k8 sin ✓ cos ✓ + k9 sin
2✓)x0
+2(k8 cos2✓ + 2k9 sin ✓ cos ✓ + 3k10 sin
2✓)y0
+2(k4 cos2✓ + k5 sin ✓ cos ✓ + k6 sin
2✓)
f
0✓(x, y) =
@f
@x
cos ✓ +
@f
@y
sin ✓
f
00✓ (x, y) =
@
2f
@x
2cos
2✓ + 2
@
2f
@x@y
cos ✓ sin ✓ +
@
2f
@y
2sin
2✓
Tuesday, September 13, 11

27
There is an edge at (x0,y0) if for some ρ, | ρ |< ρ0 where ρ0 is the length of the side of a pixel,
fθ”(x0,y0; ρ) = 0 and
fθ’(x0,y0; ρ) ≠ 0
x0 = ⇢ cos ✓
y0 = ⇢ sin ✓
f
00✓ (x0, y0) = 6(k10 sin
3✓ + k9 sin
2✓ cos ✓ + k8 sin ✓ cos
2✓ + k7 cos
3✓)⇢
+2(k6 sin2✓ + k5 sin ✓ cos ✓ + k4 cos
2✓)
= A⇢+B
Tuesday, September 13, 11

28
Tuesday, September 13, 11

29
Tuesday, September 13, 11

30
Canny Edge detectionn Let I[i,j] be the image. First use Gaussian smoothing:
S[i,j]=G[i,j;σ]*I[i,j]n Find approx. gradient usin 2×2 first-diff. approx.
q x direction:
P[i,j]=(S[i,j+1]-S[i,j]+S[i+1,j+1]-S[i+1,j])/2q y direction:
Q[i,j]=(S[i,j]-S[i+1,j]+S[i,j+1]-S[i+1,j+1])/2
Tuesday, September 13, 11

31
Canny edge detection (cont)
n Magnitude and orientation: rectangular to polar conversion:q M[I,j]=√(P[i,j]2+Q[i,j]2) q θ[i,j] = arctan(Q[i,j]/P[i,j])
n Non-maxima Suppressionq Thins the ridges of gradient magnitude to one pixelq Passes a 3x3 neighborhood across the magnitude
array M[I,j] and replace pixels with 0 if not greater than neighbors
Tuesday, September 13, 11

32
Possible gradient orientations are partitioned into the following sectors for
non-maxima suppression
876
504
321
Replace pixel 0 with value 0 if it is not bigger than neighboring pixels in the (quantized) direction of the
gradient
Tuesday, September 13, 11

33
Canny Edge detection (cont)
n Thresholdingq Apply two threshold t1 and t2, with t2 = 2*t1q This produces two threshold images T1 & T2q T2 will have fewer edges, but might have gapsq When the end of a contour in T2 is reached, look into
T1 at the 8-neighboring locations to see if there are further edge points that can be linked to the contour.
Tuesday, September 13, 11

34
Test Image (256x256)
Tuesday, September 13, 11

35
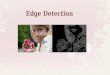
Canny with 7x7 Gaussian smoothing + gradient approx + NMS
Tuesday, September 13, 11

36
Canny with 31x31 Gaussian smoothing
Tuesday, September 13, 11

37
Edge Detector Performance Evaluationn Probability of false edgesn Probability of missing edgesn Edge angle estimation errorn Mean square distance between estimated and real edgesn Tolerance to distorted edges
Tuesday, September 13, 11

38
Pratt´s Figure of Merit
detected edges
ideal edges
distance betweenactual and ideal
edges
constant used to penalize displaced edges
FM =
1
max(IA, II)
IAX
i=1
1
1 + ↵d2i
Tuesday, September 13, 11

39
Sequential Methods
Edge following: scan image looking for strong edge extend the edge in the proper direction by looking at neighboring edges link if directions are compatible look at large neighborhood to fill in missing edges
Tuesday, September 13, 11

40
Tuesday, September 13, 11