Embed Size (px)
DESCRIPTION
Citation preview
05B: Equilibrium
San Juanico Bridge
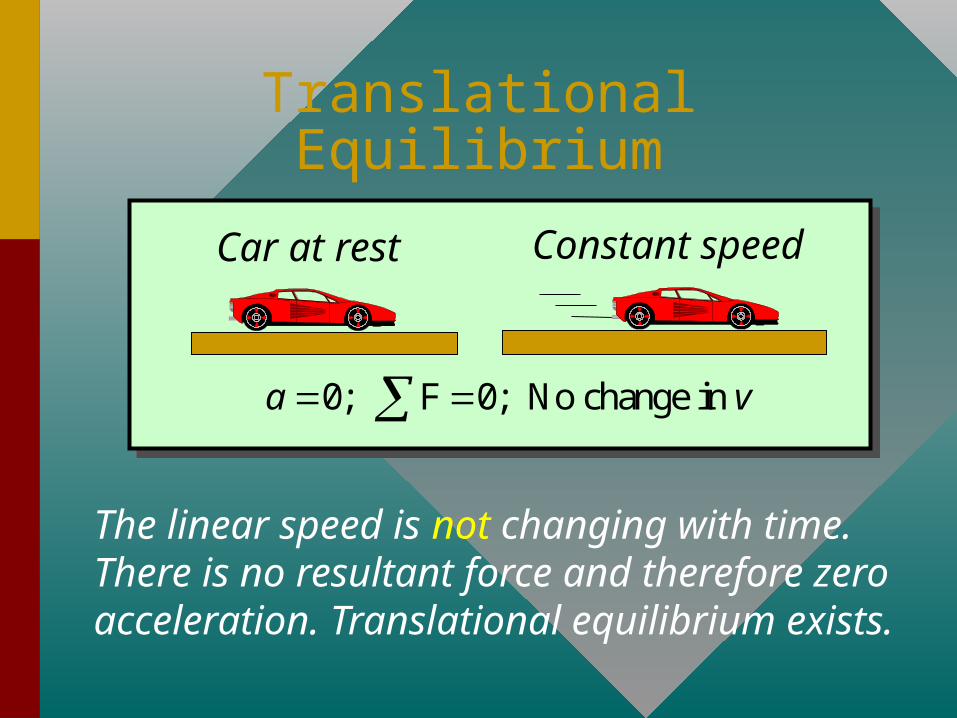
Translational Equilibrium
The linear speed is not changing with time. There is no resultant force and therefore zero acceleration. Translational equilibrium exists.
Car at rest Constant speed
0; F 0; No change in a v
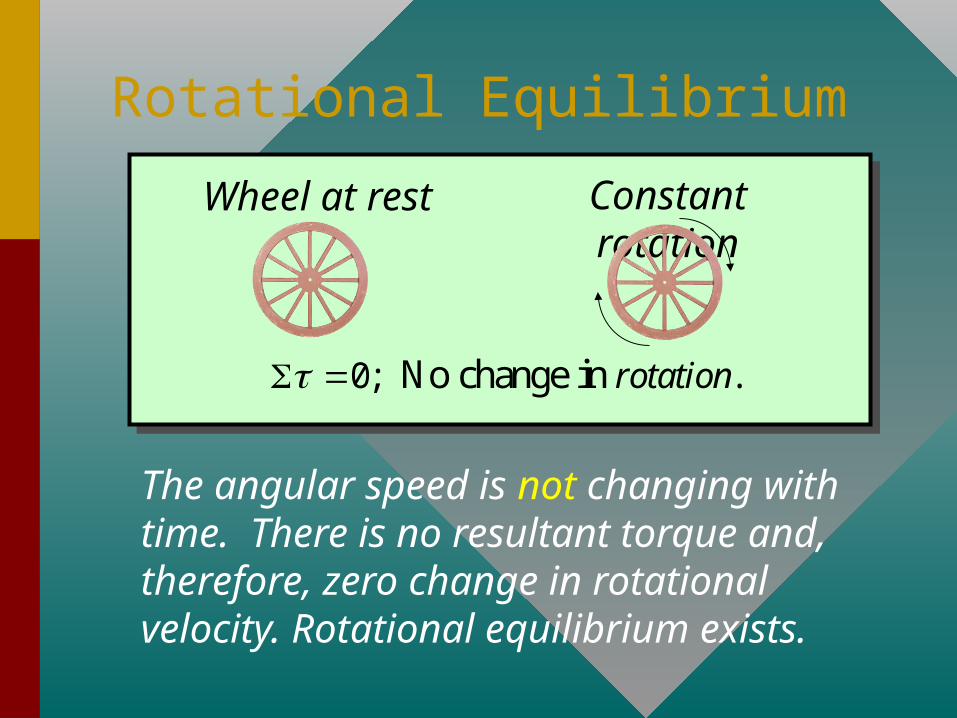
Rotational Equilibrium
The angular speed is not changing with time. There is no resultant torque and, therefore, zero change in rotational velocity. Rotational equilibrium exists.
Wheel at rest
Constant rotation
0; . No change in rotation
Equilibrium
• An object is said to be in equilibrium if and only if there is no resultant force and no resultant torque.
0; 0x yF F First Condition:
0 Second Condition:
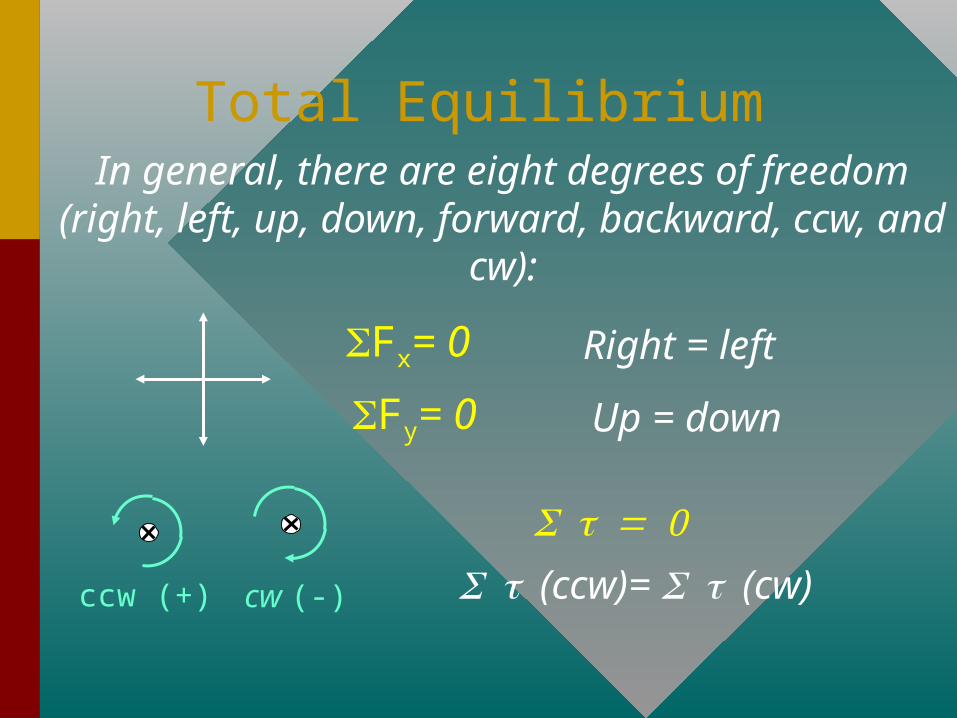
Total EquilibriumIn general, there are eight degrees of
freedom (right, left, up, down, forward, backward, ccw, and cw):
SFx= 0 Right = left
SFy= 0 Up = down
ccw (+) cw (-)
= 0S t
S t (ccw)= S t (cw)
General Procedure:
• Draw free-body diagram and label.
• Choose axis of rotation at point where least information is given.
• Extend line of action for forces, find moment arms, and sum torques about chosen axis: = St t1 + t2 + t3 + . .
. = 0• Sum forces and set to zero: SFx= 0; SFy= 0
• Solve for unknowns.
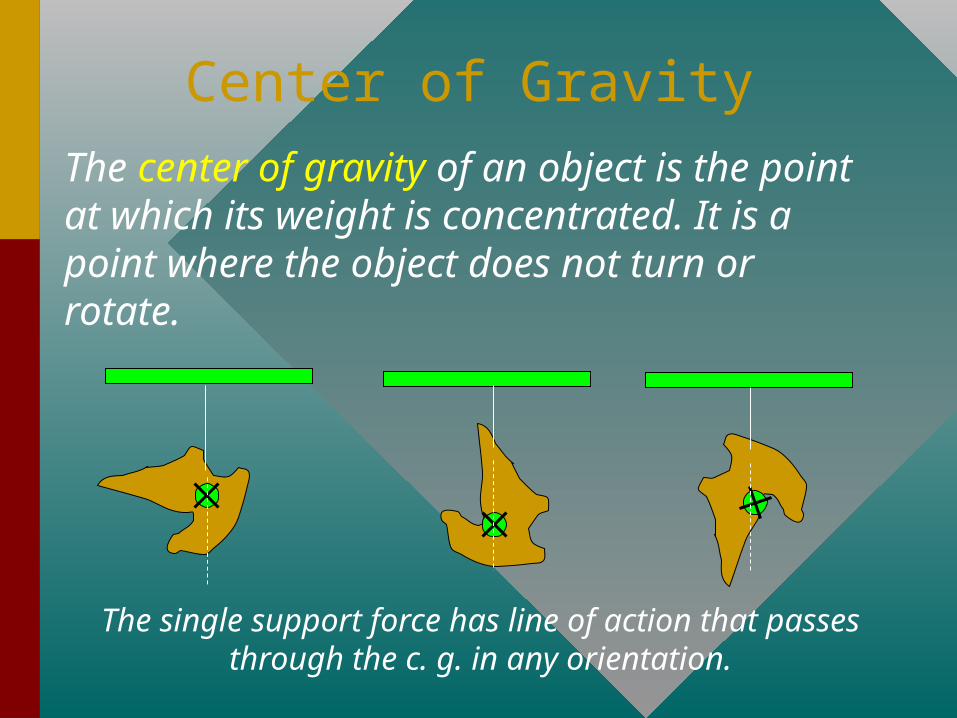
Center of GravityThe center of gravity of an object is the point at which its weight is concentrated. It is a point where the object does not turn or rotate.
The single support force has line of action that passes through the c. g. in any orientation.
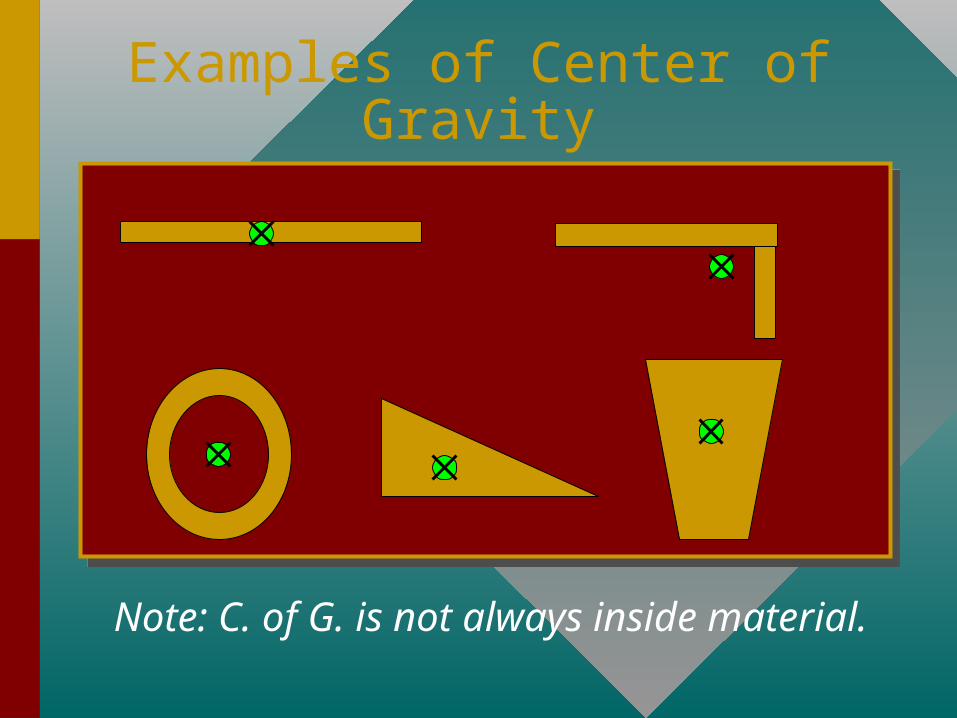
Examples of Center of Gravity
Note: C. of G. is not always inside material.
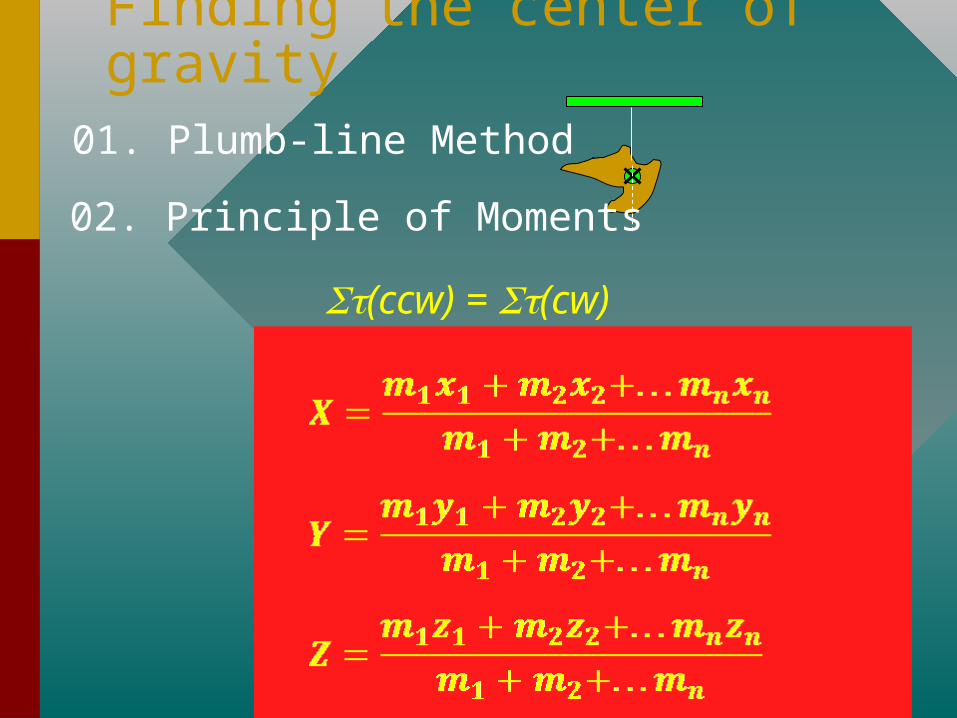
Finding the center of gravity
01. Plumb-line Method
02. Principle of Moments
St(ccw) = St(cw)
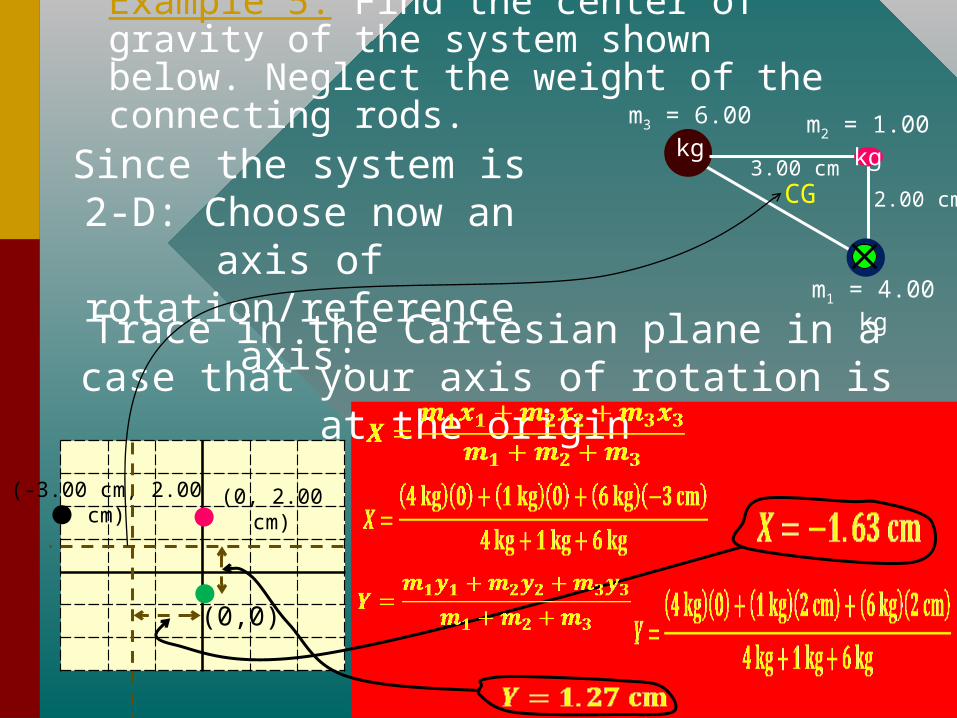
Example 5: Find the center of gravity of the system shown below. Neglect the weight of the connecting rods.
m1 = 4.00 kg
m2 = 1.00 kg
m3 = 6.00 kg
3.00 cm
2.00 cmSince the system is 2-D: Choose now an axis of rotation/reference
axis:Trace in the Cartesian plane in a case that your axis of rotation is at the origin
(0,0)
(0, 2.00 cm)
(-3.00 cm, 2.00 cm)
CG
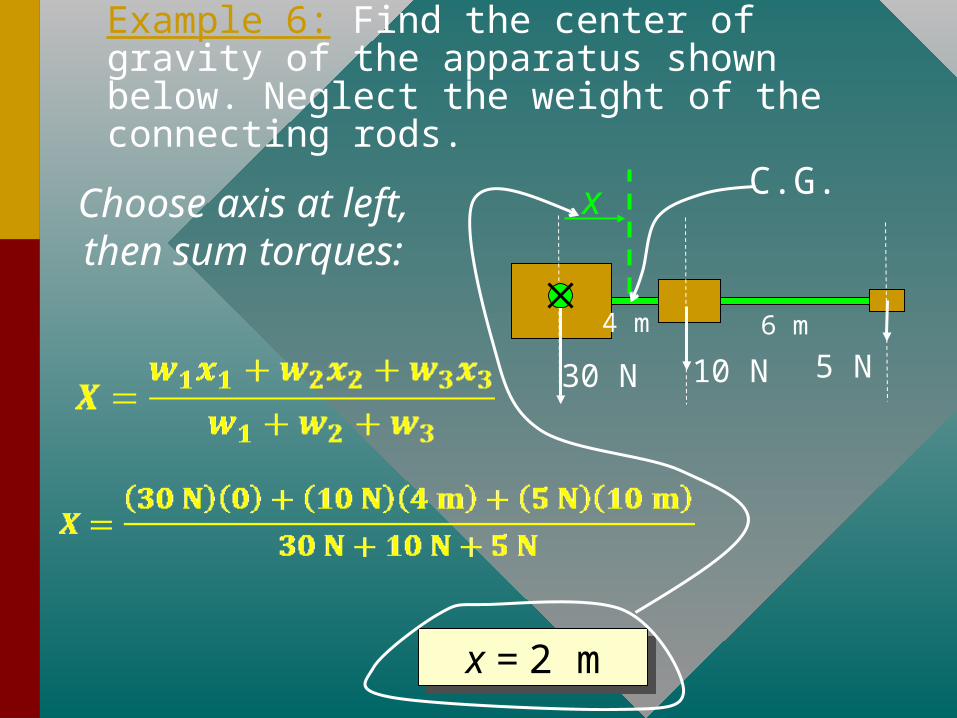
Example 6: Find the center of gravity of the apparatus shown below. Neglect the weight of the connecting rods.
30 N 10 N 5 N4 m 6 m
xChoose axis at left, then sum
torques:
x = 2 mx = 2 m
C.G.
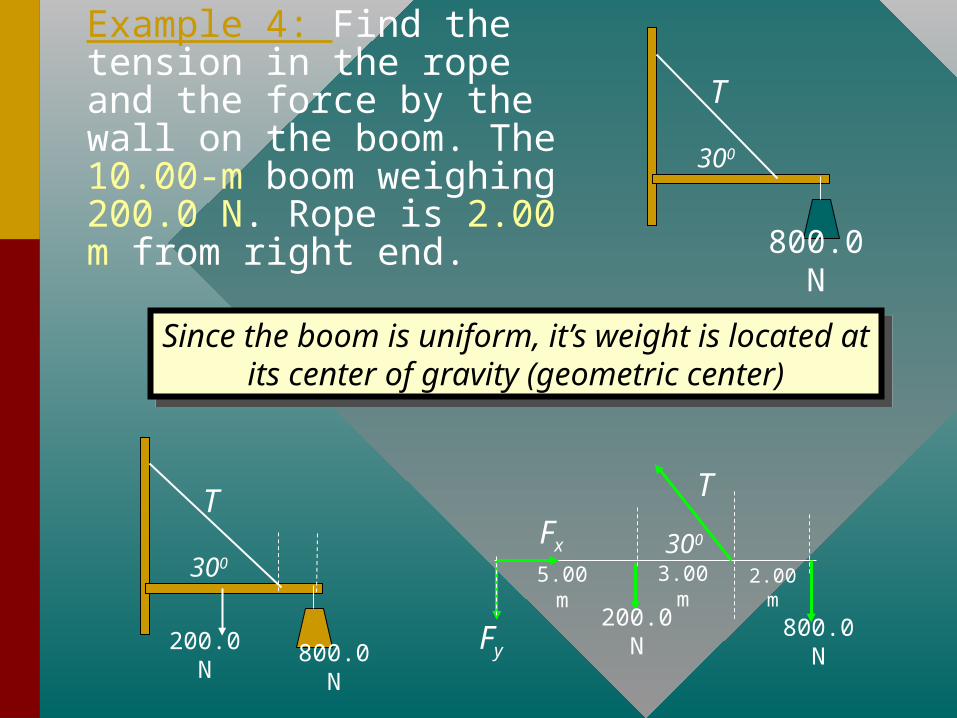
Example 4: Find the tension in the rope and the force by the wall on the boom. The 10.00-m boom weighing 200.0 N. Rope is 2.00 m from right end.
300
T
800.0 N
Since the boom is uniform, it’s weight is located at its center of gravity (geometric
center)
Since the boom is uniform, it’s weight is located at its center of gravity (geometric
center)
300
T
800.0 N
200.0 N
300
800.0 N
200.0 N
T
Fx
Fy
2.00 m
3.00 m5.00 m
300
T
800.0 N
200.0 N
300
w2w1
T
Fx
Fy
2.00 m3.00 m5.00 m
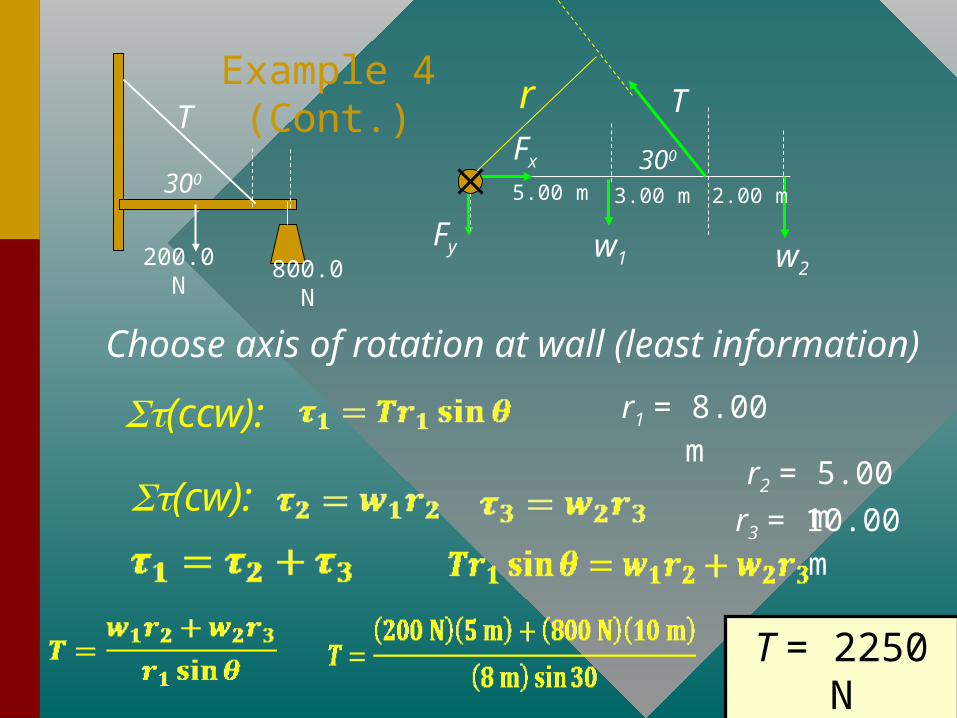
Example 4 (Cont.)
Choose axis of rotation at wall (least information)
St(ccw):
r
St(cw):
r1 = 8.00 m
r2 = 5.00 mr3 = 10.00 m
T = 2250 N
T = 2250 N
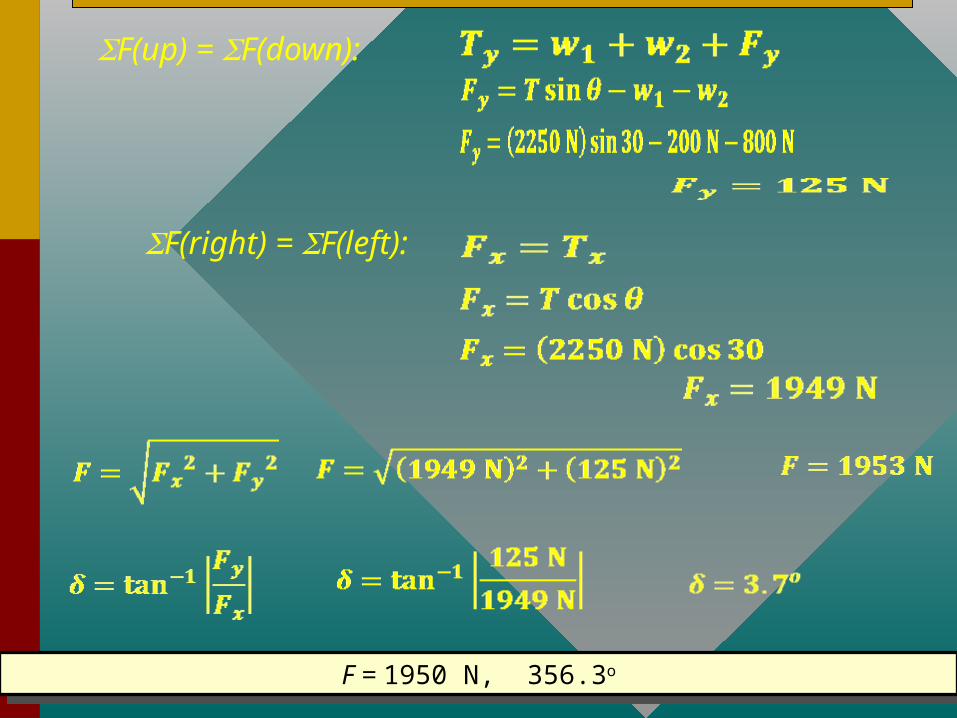
SF(up) = SF(down):
SF(right) = SF(left):
F = 1950 N, 356.3oF = 1950 N, 356.3o
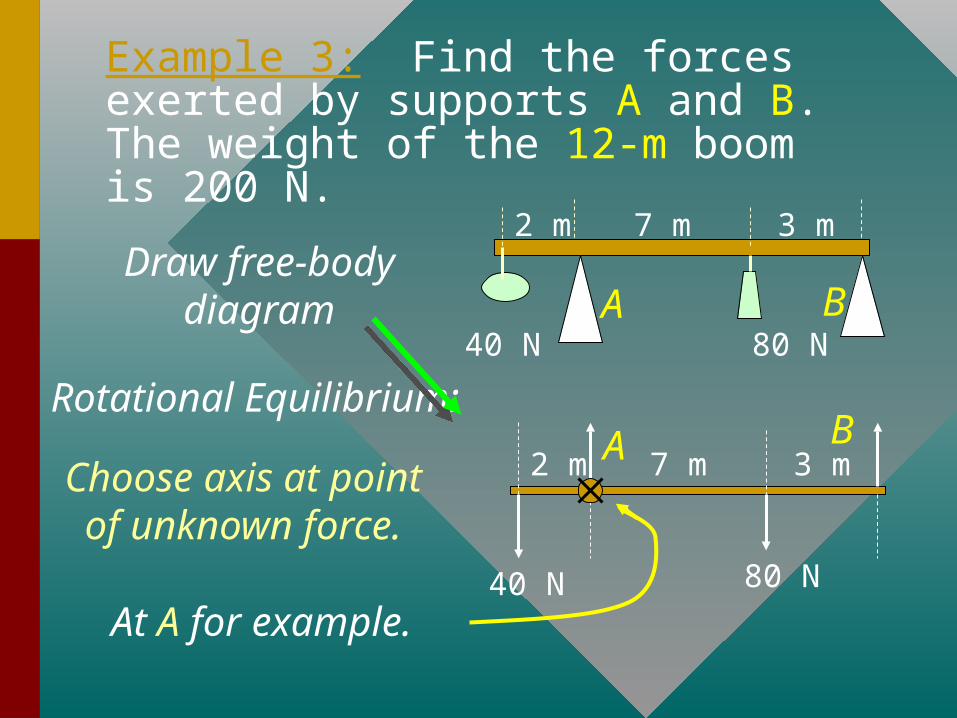
Example 3: Find the forces exerted by supports A and B. The weight of the 12-m boom is 200 N.
40 N 80 N
2 m
3 m
7 m
A BDraw free-body
diagram
Rotational Equilibrium:
Choose axis at point of unknown
force.At A for
example.
40 N 80 N
2 m
3 m
7 m
A B
Summary
0xF
0yF
0
An object is said to be in equilibrium if and only if there is no resultant force and no resultant torque.
An object is said to be in equilibrium if and only if there is no resultant force and no resultant torque.
Conditions for Equilibrium:
Summary: Procedure
• Draw free-body diagram and label.
• Choose axis of rotation at point where least information is given.
• Extend line of action for forces, find moment arms, and sum torques about chosen axis: = St t1 + t2 + t3 + . .
. = 0• Sum forces and set to zero: SFx= 0; SFy= 0
• Solve for unknowns.













![Statics 6 Ed[1]. Chapter 5](https://img.pdfslide.us/doc/110x75/5695d1c41a28ab9b0297d903/statics-6-ed1-chapter-5.jpg)















