Embed Size (px)
Citation preview

Chapter 11 位置特定と地図作成 芝浦工業大学
システム理工学部
機械制御システム学科
運転支援システム研究室
海老原望

1.概要
自分がどこにいるのか 自分はどこにいたのか
ナビゲーションの問題 一般的に…… • 位置特定 • 地図作成 →正確な地図作成のために 密接な関係が存在
• 車輪のシャフトエンコーダ • GPS • MEMS慣性誘導システム それぞれ欠点を持つため, エラーの無視 トポロジーマップの使用 といったアプローチをした
従来の位置特定の手法
answer
より洗練されたシステムはランドマークを用いたものである.地図作成には,
ベイズ,デンプスターシェーファー,HIMM手法による占有グリッドを使用する.

2.ソナーセンサーモデル
不確実性を更新するためにセンサーモデルが必要とされている.このセンサーモデルは,結果の正しさを
立証するデータの収集するという点において検討されている.
データの正しさの頻度 信頼とモデルの形成
Ex.)ポラロイド超音波変換器,ソナー
この章では,ポラロイドソナーを使用する

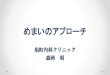
ポラロイドソナーは,ロボット工学分野では図のようなモデルに収束した.
検波可能な最大範囲Rとその半円錐の角度を示すβによって視野は規定される.さらに,視野はグリッドと呼ばれる領域の状態を表す物により三つの領域に分けることが出来る.
I. 占有である場合⇒丘
II. 空である場合⇒谷
III. 状態が不明な場合⇒平面
2.ソナーセンサーモデル

3.ベイズ規則
証拠を集めるための最も使用される方法は,センサー 測定値を変換しベイズの規則に組み合わせることである CMUのモラベックにより作られたベイズの公式とは,計算上の利点,前提条件が存在する
⇒ベイズのアプローチでは,センサーモデルは条件付き確率P(s|H)を生み出した.その後,P(H|s)に変換される 同時感知の2つの異なったセンサー 2つの異なる時間によるもの 各々の二つの確率はベイズ規則により合わせることが出来る.

3.ベイズ規則
条件付きの確率
検知した場所に何があるか関係なしに,どちらのことも空か占有の確率で表すことが出来る
占有グリッドでは二つの要素ごとに計算される.
条件付き確率のP(H|s)へ変換
ソナーモデルはP(s|H)を示し,実際にはP(H|s)として計算される.

4.デンプスター・シェファーの理論
別の証拠理論はデンプスター・シェファーの証拠理論である.これはベイズ規則に似た結果を生み出す. • ベイズ規則⇒確率関数の証拠に依存 • デンプスター証拠理論⇒信念関数の確率証拠 確率信念関数はシェーファー関数と呼ばれ, 結合デンプスター公式と組み合わされる. ⇒ベイズ公式結果は似ているが,手法は大きく異なる. デンプスター公式は複数観測の不一致条件を示す.

4.デンプスター・シェファーの理論
シェファーの信念関数とは 命題の確率ではなく,信念重みmを測定する.任意に組み合わされた命題に重みを置くことが出来る.これは,領域内に何が存在するかに関係しない.
ソナーへの信念関数は,ほかの測定と組み合わさる状態になる.これは信念関数ベルであり,3つの条件を満たす必要がある. 組み合わせのデンプスター規則
最も使用される規則であり,二つの信念関数と二つのベルの状態を組み合わせる.

5.HIMM
HIMMとは,動作地図作成におけるヒストグラム(The Histogrammic in Motion Mapping)の略称である. このアルゴリズムは占有グリッド内の特定の要素が占有か空かを決めるアプローチを与える. ⇒0.8m/sの最高速で障害物回避の改善のために生まれた. これまではベイズモデルを使用. 莫大な計算量のため高速アルゴリズムが必要 ロボット競技会出場のロボットに搭載され,ランドマークされた道路上のポイントを移動する競技で優勝した. ⇒後に,HIMMと占有グリッドは,多くの競技ロボットで標準となった.

5.HIMM
HIMMは図のソナーモデルを使用する
二つの特徴
• 複雑さを軽減した音響軸に沿った要素のみの更新
• 不確実なスコアの二つの浮動小数点表示
grid[i][j] = grid[i][j] + I where 0 ≦ grid[i][j] ≦ 15
I = I+ if occupied
I - if empty

6.手法の検討
占有グリッド法は長所と短所がある.
• ベイズ手法,デンプスターシェーファー手法
⇒ステレオまたはレーザーのような他のセンサー手段から
の測定値はセンサーモデルが存在するように簡単に融合
できる.
• HIMM手法
⇒ソナーに対する制限が存在するが,計算上の利点がある.

6.手法の検討
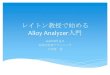
ロボットの通る廊下を示すと,ベイズとデンプスター
グリッドと比べてわずかに優位である.しかし実際には,ベイズとデンプスターシェーファーは環境の変化に適応する少しのパラメーターを持っている.
a.)Bayesian b.)Dempster-Shafer c.)HIMM

7.位置推定
シャフトエンコーダーは不確実である.位置推定は直接センサーデータからの特徴量を使用する.この特徴量による位置推定はいくつかの視点から見ることが出来るという点において,トポロジカル経路案内の特徴量に関する考え方と似ている.
現在の計測地図の作成方法は特徴量の位置推定に大きく依存していて,多くの手法が連続的位置推定と地図適合のいくつかの形を使用している.

7.位置推定
地図適合は占有グリッドの不確実さにより複雑化する.
⇒n-1秒時より,n秒時の方が観測では優れている.
ゲートウェイの関係性が明らかであるため,
トポロジカルマップ作りの特徴に基づいた方法と
似通っている.
問題点
ドアとして廊下との交差点を間違えて解釈する可能性

7.位置推定
シェーファーらは像と特徴に基づいた手法を比較.
• 像による手法⇒環境における依存を減らすことが課題.
• 特徴による手法⇒データ量が少なく,位置推定中にアルゴリズムを行うため,速い.
- 重要なポイント -
位置推定では,動くものを対象として処理しない.
⇒位置の更新時に異なり,過去と現在の測定値を一致するような処理が不可能に近いため.

8.経路探索
経路検索は,出発位置と到着位置を表す.
⇒いかに効率的に未知の場所をカバーするかという課題.
ボロノイ手法 固有感覚の短期的な持続を使う.
「占有グリッド内の証拠情報を利用し,目的地に到達すると過去情報を削除し,新たな目的地を設定.」
→実行が簡単な反面,二つ以上の未知領域を設定には時間がかかる.
フロンティア手法 ランダムに動き回り検索を行う. →多くの場合莫大な時間を費やすが 領域を全部カバーできる.

9.まとめ
地図作成はロボットの位置とは関係なく,グローバルマップの中にセンサーの観測値と位置推定,あるいはロボットの周りの情報を変換.
計測地図の最も一般的なデータ構造は占有グリッド.
ベイズ法
デンプスター・シェーファー法
HIMM法
より高い精度
を合わせる センサフュージョン
計算量が一番少ない

9.まとめ
センサフュージョンの改善のためには,仮想センサとしての占有グリッドが使用される.
Ex.)固定座標によるグローバルマップ作成には
位置推定が必要.
反応的振る舞いと同じ頻度は,計算コストを生む.
推定の頻度が多いほど正確な地図に

9.まとめ
生センサーデータは不完全である. ⇒位置推定と地図作成の不安定 ほとんどの経路技術は地図作成と位置推定を同時に行う. それらは直接地図に観測データを適合する. 特徴に基づくものは計測地図作成には向かないが,トポロジカル マップ作成には適している.また,センサーの測定よりも地図上の 現在位置には適している. 二つの問題 ⇒不確かな場所を検出,区別できない場所の検知
特に,走行距離計測法
物体全体(像) 特徴 に基づく

9.まとめ
トポロジカルマップでの位置推定 ⇒マップ上に現在のゲートウェイと新しいゲート ウェイを照合することで行う. すべての地図作成は変化環境化に弱い. 新手法:フロンティアベースとGVG • フロンティア⇒占有グリッド上の検知した領域に 焦点をあて,その後探索エリアをランク付け • ボロノイ手法⇒ボロノイ図的に幾何学特性を使用