Embed Size (px)
Citation preview

CHAOS SYNCHRONIZATION OF A NEW MODIFIED CHUA OSCILLATOR USING
CONTROL AND LYAPUNOV THEORIES
Mauricio Zapateiro De la Hoz∗, Leonardo Acho†, Yolanda Vidal†
∗Univ. Tecnologica Federal do Parana, Av. Alberto Carazzai 1640, Cornelio Procopio, PR, Brazil
†Universitat Politecnica de Catalunya, C. Comte d’Urgell 187, Barcelona, Spain
Emails: [email protected], [email protected], [email protected]
Abstract— In this paper, two different synchronization schemes for a new modified Chua oscillator are pre-sented. The synchronization schemes are designed by using active control and Lyapunov stability theories. Inthe first scheme, the slave requires three signals from the master for synchronization. In the second scheme, onlyone signal from the master is required for synchronization. The difference between both schemes is, besides thenumber of required signals, the synchronization time. A Poincare map is provided as a proof of chaoticity of themodified oscillator. Numerical simulations are performed in order to verify the results.
Keywords— Chaos synchronization, Active control, Lypaunov stability, Chua oscillator
Resumo— Neste artigo, dois esquemas de sincronizacao diferentes para um novo oscilador Chua modificado saoapresentados. Os esquemas de sincronizacao sao projetados usando as teorias do controle ativo e da estabilidadede Lyapunov. No primeiro esquema, o escravo requer tres sinais do mestre para a sincronizacao. No segundoesquema, apenas um sinal do mestre e necessario para a sincronizacao. A diferenca entre ambos os sistemas e,alem do numero de sinais necessarios, o tempo de sincronizacao. Um mapa de Poinare e fornecido como umaprova de caos do oscilador modificado. Simulacoes numericas sao realizadas a fim de verificar os resultados.
Palavras-chave— Caos, sincronizacao, controle ativo, estabilidade Lyapunov, oscilador de Chua
1 Introduction
The synchronization of chaotic systems is a topicthat has raised the interest of scents in the last 30years approximately. Pecora and Carroll (1990)were among the first to work on this idea. Theobjective is to use the output of the driving (ormaster) system to control the response (or slave)system in such a way that they both oscillate ina synchronized manner. It is possible to find inthe literature a wide variety of synchronizationschemes. For instance, Agiza and Yassen (2001)demonstrated that two chaotic systems can besynchronized by means of active control. The au-thors worked with two systems: one of them com-posed of two identical Rossler oscillators and theother one composed of two identical Chen oscil-lators. Huang (2008), investigates the chaos syn-chronization of two different hyperchaotic oscilla-tors with fully unknown parameters. In this work,he explores synchronization of the Lorenz-Stenflo(LS) system with a novel dynamical system calledCYQY, as well as the synchronization between anLS system and a hyper chaotic system. In orderto achieve this goal, adaptive control techniquesare employed. Park (2006) investigates the chaossynchronization between two different chaotic sys-tems by means of nonlinear control laws. Theauthor demonstrates that the two different sys-tems could be controlled using nonlinear controltechniques and proved the closed-loop stability bymeans of linear control theory. Other examplescan be found in the works by Benitez and Acho(2007), Chua et al. (1993), Chuang et al. (2012),Feki (2003), Koofigar et al. (2011) and Zhang et al.
(2006), to name a few.
In this paper, we present two synchronizationschemes for a modified Chua oscillator. This os-cillator is the physical realization of a circuit de-veloped by Leon Chua (Chua et al., 1986) andit is well known for its simplicity and because itshows chaotic dynamics when the appropriate de-vices are selected. There are several works on theChua oscillator and different modifications havebeen proposed. For instance, Hartley (1989) pro-posed a modification of the characteristic functionf(x1) of the oscillator. The piecewise nonlinear-ity of the system was replaced by a cubic non-linearity. This nonlinearity has a shape similarto that of the original function while remainingsmooth. This modification was done in order toavoid the analysis difficulties due to the discon-tinuities of the original function. Some works inwhich this variation of the Chua circuit is con-sidered are (Salarieh and Alasty, 2008), (Wu andChen, 2002) and (Yassen, 2003). Wu and Chen(2002) designed a backstepping controller for sup-pressing the chaotic motion of the modified Chuacircuit. Yassen (2003) addressed the adaptive con-trol and synchronization of the modified Chuacircuit with unknown parameters. Salarieh andAlasty (2008) investigated the drive-response syn-chronization problem between two Chua oscilla-tors with stochastically time varying different pa-rameters. On the other hand, a new version ofthe Chua circuit was investigated by (Kilic, 2006).The objective of the work was to perform an ex-perimental study about the impulsive synchro-nization of the the modified Chua circuits. Theauthor modified the circuit connections and in-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1158

serted passive elements. The resulting circuit wasa higher dimensional system that exhibits the orig-inal dynamics of the Chua circuit.
The proposed modification in this paper is anew characteristic function f(x) that is bounded.This can facilitate the analysis and synchroniza-tion and could be useful in applications such as se-cure communications. The objective of this workis the synchronization of two modified Chua oscil-lators using active control and Lyapunov stabilitytheories. The paper is organized as follows. InSection 2, we explain the new modification of theChua oscillator and demonstrate that it is indeedchaotic. In Section 3, a three-signal synchroniza-tion scheme is develop. In Section 4, a one-signalsynchronization scheme is presented. The perfor-mance of both synchronization schemes are pre-sented in Section 5 and the conclusions are out-lined in Section 6.
2 Modified Chua oscillator
The Chua oscillator is the physical realization ofan oscillator developed by Leon Chua during hisvisit to Waseda University (Tokyo, Japan) in 1983- 1984. The circuit is well known for its simplicitybut most importantly for its chaoticity when theappropriate devices are selected. Hence the inter-est it has raised since it was published and that ispatent in several works found in literature. Theequations of the dimensionless system are (Chuaet al., 1986):
x1 =α (y1 − f(x1)) , (1)
y1 =x1 − y1 + z1, (2)
z1 =− βy1, (3)
f(x1) =m1x1 +1
2(m0 −m1)
× (|x1 + 1| − |x1 − 1|),(4)
where the overdot denotes differentiation with re-spect to time t; α > 0, β > 0, m0 and m1 areparameters that must be chosen appropriately forobtaining chaotic behavior. The function f(x1) isthe canonical piecewise-linear function describingan odd-symmeric three-segment piecewise-linearcurve having a breakpoint at x = −1 and x = −1,a slope equal to m0 = a+ 1 < 0 at the inner seg-ment and m1 = b + 1 > 0 at the outer segments,respectively.
The chaotic oscillator that we are using in thiswork is a modified Chua oscillator. In this work,we modified the original system by choosing thefollowing characteristic function f(x1):
f(x1) = − sinx1 · e−0.1|x1|
. (5)
Note that 5 is a bounded smooth function.The system of Equations 1-3 and 5 shows a chaoticbehavior with α = 9.35 and β = 14.35 as can beseen in Figure 1.
14 16 18 20−1
0
1−30
−20
−10
x1
x2
x3
Figure 1: Dynamics of the modified Chua oscilla-tor.
14 16 18 20−1
0
1−30
−20
−10
x1
x2
x3
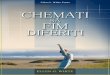
Figure 2: Trajectories of the modified Chua oscil-lator intersecting the plane x+ y + z + 1 = 0.
A proof of chaoticity of the new system is pro-vided by means of a Poincare map. This is a use-ful graphical tool that helps determining if a sys-tem is periodic, non-periodic, chaotic or random(Thomsen, 2003). It can be created by observingwhere the trajectories of the system intersect aparticular plane at discrete time tk, k = 0, 1, 2....If the Poincare map consists neither of a finitenumber of points nor of points filling up a closedcurve but nevertheless appear ordered, then it isa strong indicator of chaos (Thomsen, 2003).
Figure 3 is the Poincare map of our modi-fied Chua oscillator generated when the trajec-tories intersect the plane x + y + z + 1 = 0 asit is depicted in Figure 2. The map of Figure 3shows the points where the trajectories intersectthe plane. The two different markers show if thetrajectory goes in one direction or another as itintersects the plane. The map is seen in the XYplane perspective.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1159

14 16 18 20−0.8
−0.6
−0.4
−0.2
0
0.2
x1
x2
in−direction out−direction
Figure 3: Poincare map of the oscillator as seenin the XY plane perspective.
3 Three-signal synchronization
In this section we develop a synchronizationscheme for the modified Chua oscillator. The de-sign is done using active control and Lypaunovstability theories. The resulting slave requiresthree signals from the master for synchronization.The following theorem is the base of the synchro-nization scheme that uses three signals for syn-chronization.
Theorem 1 Consider the modified Chua oscilla-
tor given by Equations 1 - 3 and 5 with α and
β having appropriate positive values that guaran-
tee the chaoticity of the system. Then the slave
system given by:
x2 =− αf(x2)− 2αsgn(x2 − x1)
− k1(x2 − x1) + αy1,
(6)
y2 =x1 − y1 − k2(y2 − y1) + z1, (7)
z2 =− βy1 − k3(z2 − z1), (8)
f(x2) =− 0.1 sinx2 · e−0.1|x2|
, (9)
where k1, k2 and k3 are positive design parame-
ters, synchronizes with the master modified Chua
oscillator and thus:
i) limt→∞
x2(t)− x1(t) = 0.
ii) limt→∞
y2(t)− y1(t) = 0.
iii) limt→∞
z2(t)− z1(t) = 0.
Proof: Consider the system of Equations 1 - 3 and5 as the master system. The objective is to find anew system, the slave, that synchronizes with themaster. Hence, let the slave be:
x2 = α(y2 − f(x2)) + u1, (10)
y2 = x2 − y2 + z2 + u2, (11)
z2 − βy2 + u3, (12)
with f(x2) defined as in Equation 9. The vari-ables u1, u2 and u3 are control inputs to be foundin such a way that synchronization is achieved.Define the following error variables:
e1 = x2 − x1, (13)
e2 = y2 − y1, (14)
e3 = z2 − z1. (15)
Synchronization is achieved when the errorvariables 13 - 15 converge to zero. Substitutionof Equations 1 - 3 and 6 - 8 into the derivatives ofthe error variables yields:
e1 =x2 − x1 = αe2 − α (f(x2)− f(x1))
+ u1,
(16)
e2 =y2 − y1 = e1 − e2 + e3 + u2, (17)
e3 =z2 − z1 = −βe2 + u3. (18)
Now consider the following Lyapunov functioncandidate and its derivative:
V =1
2e2
1+
1
2e2
2+
1
2e2
3, (19)
V = e1e1 + e2e2 + e3e3. (20)
Substitution of Equations 16-18 into Equation20 yield:
V =αe1e2 − α (f(x2)− f(x1)) e1 + ue1
+ e1e2 − e2
2+ e3e2 + u2e2
− βe2e3 + u3e3.
(21)
Recall that the functions f(x1) and f(x2) arebounded. Furthermore, |f(x1)| < 1 and |f(x2)| <1. Thus we can write:
V ≤αe1e2 + α|f(x1)||e1|+ α|f(x2)||e1|
+ u1e1 + (e1 − e2 + e3 + u2) e2
+ (−βe2 + u3) e3
=αe1e2 + 2α|e1|+ u1e1
+ (e1 − e2 + e3 + u2) e2
+ (−βe2 + u3) e3
=(αe2 + 2αsgn(e1) + u1) e1
+ (e1 − e2 + e3 + u2) e2
+ (−βe2 + u3) e3.
(22)
Let the control inputs be:
u1 = −αe2 − 2αsgn(e1)− k1e1, (23)
u2 = −e1 + e2 − e3 − k2e2, (24)
u3 = βe2 − k3e3, (25)
with k1 > 0, k2 > 0 and k3 > 0. Substitution ofEquations 23 - 25 into 22 yields:
V ≤ −k1e2
1− k2e
2
2− k3e
2
3≤ 0. (26)
Since V > 0 and V ≤ 0, and according to Lya-punov’s stability theory, the error variables willconverge to zero and thus:
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1160

i) limt→∞
e1 = limt→∞
x2(t)− x1(t) = 0 ⇒ x2 →
x1.
ii) limt→∞
e2 = limt→∞
y2(t)− y1(t) = 0 ⇒ y2 →
y1.
iii) limt→∞
e3 = limt→∞
z2(t)− z1(t) = 0 ⇒ z2 →
z1.
Thus, the master and slave systems synchro-nize globally and asymptotically. Finally, substi-tute Equations 23 - 25 into Equations 10 - 12. Thisyields:
x2 =− αf(x2)− 2αsgn(x2 − x1)
− k1(x2 − x1) + αy1,
y2 =x1 − y1 − k2(y2 − y1) + z1,
z2 =− βy1 − k3(z2 − z1),
f(x2) =− 0.1 sinx2e−0.1|x2|
,
and the proof is complete. ✷
4 One-signal synchronization
The synchronization scheme developed in Section3 requires three signals x1, y1 z1 for synchronizingthe master and the slave. This may not be appro-priate in some applications like communicationswhere the transmission channels are limited andthus, the least amount of signals for transmissionis required. In this section we present a differentsynchronization scheme that requires only one sig-nal for synchronizing the master and the slave. Itconsists of a dynamic system that takes the sig-nal x1 generates the signals x2, y2 and z2 that areestimations of the oscillator signals x1, y1 and z1,respectively. The following theorem is the base ofthe synchronization system.
Theorem 2 Consider the modified Chua oscilla-
tor given by Equations 1 - 3 and 5 with α and β
having appropriate positive values that guarantee
the chaoticity of the system. Consider also a con-
stant ρ > 0 such that |x2(t)| < ρ. Then the system
given by:
x2 = k · sgn(x1 − x2), (27)
y2 = x1 − y2 + z2, (28)
z2 = −βy2, (29)
where k is a design parameter such that k > α(ρ+1) synchronizes with the modified Chua oscillator
and thus:
i) limt→Ts
x2(t) = x1(t), for a given Ts ∈ R+.
ii) limt→∞
y2(t) = y1(t).
iii) limt→∞
z2(t) = z1(t).
Proof: Let the system of Equations 1 - 3 be themaster and the system of Equations 27 - 29 bethe slave. The function f(x1) in 5 is such that|f(x1)| ≤ 1, ∀t ≥ 0. Since the system 1 - 3 ischaotic, the signal y1(t) is bounded and thus, thereexists a constant ρ > 0 such that |y1(t)| ≤ ρ ∀t ≥
0. In fact, ρ depends on the initial conditions.However, assuming that y1(0) lays inside the at-tractor then ρ can be obtained independently ofthe initial conditions. The proof begins by defin-ing the following error variable and its derivative:
e1 = x1 − x2, e1 = x1 − x2. (30)
Consider the terms x1 and x2 from Equations1 and 27, respectively. Substitution of these termsinto Equation 30 yields:
e1 = α(y1 − f(x1))k − sgn(x1 − x2). (31)
Let V1 =1
2e2
1be a Lyapunov function candidate.
Then:
V1 = e1e1 = e1αy1 − e1αf(x1)− ke1sgn(e1)
= −k|e1|+ αx2e1 − αf(x1)e1
≤ −k|e1|+ αy1e1 + |αf(x1)e1|
≤ −k|e1|+ αy1e1 + |α| · 1 · |e1|
= −k|e1|+ αy1e1 + α|e1|.
Recall that α > 0 and |y1(t)| < ρ. Thus wecan write:
V1 ≤ −k|e1|+ αρ|e1|+ α|e1|
= −|e1| (k − α(ρ + 1)) .
V1 will decrease and converge in finite time ifand only if k > α(ρ + 1). Under this condition,there exists a settling time t = Ts such that
limt→Ts
x1(t) = x2(t),
and thus x1(t) = x2(t), ∀t ≥ Ts. After t = Ts,the synchronization system is completed with thesubsystem of Equations 28 and 29. Define two newerror variables e2 and e3 and their derivatives, asfollows:
e2 = y1 − y2, e2 = y1 − y2,
e3 = z1 − z2, e3 = z1 − z2.
From Equations 2 and 28 we have that
e2 = x1 − y1 + z1 − x1 + y2 − z2
= −y1 + z1 + y2 − z2
= −e2 + e3.
From Equations 3 and 29 we have that
e3 = −βy1 + βy2 = −β(y1 − y2) = −βe2.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1161

0 5 10 15 2010
12
14
16
18
20
time [s]
x1
y1 - 3s
y1 - 1s
Figure 4: Comparison of x1 and y1 as generatedby the slaves.
Rearrange the error variables e2 and e3 as amatrix system e = Ae:
[
e2
e3
]
=
[
−1 1−β 0
]
︸ ︷︷ ︸
A
[
e2
e3
]
.
It is straightforward to show that for all β >
0, the eigenvalues of matrix A have negative realparts and thus:
limt→∞
y2(t) = y1(t),
limt→∞
z2(t) = z1(t).
✷
5 Numerical results
The synchronizations schemes developed in Sec-tions 3 and 4 were implemented in Mat-lab/Simulink in order to study its performance.The modified Chua system is that of Equations1 - 3 and 5 with α = 9.35 and β = 14.35. Thethree-signal slave is that of Equations 6 - 8 withk1 = k2 = k3 = 5. The one-signal slave of Equa-tions 27 - 29 with k = 1000. The initial conditionsof the master oscillator are x1(0) = 15, x2(0) = 0and x3(0) = −15. The initial conditions of theslave oscillators are, in both cases, y1(0) = 10,y2(0) = 1 and y3(0) = 15.
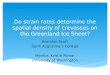
Figure 4 compares the signals x1 from themaster and the y1 from both slaves. The leg-end“1s”refers to the one-signal slave synchronizerwhile “3s” refers to the three-signal slave synchro-nizer. In both cases, the signals synchronize inless than 0.2 seconds. The one-signal slave syn-chronizes the signal x1 faster than the other. Thiscan be better seen in Figure 5.
Figures 6 and 7 compare the signals x2 andx3 from the master with the signals y2 and y3
0 0.05 0.1 0.15 0.2 0.2510
12
14
16
time [s]
x1
y1 - 3s
y1 - 1s
Figure 5: Synchronization time of x1 and y1.
0 5 10 15 20−5
0
5
10
time [s]
x2
y2 - 3s
y2 - 1s
Figure 6: Comparison of x2 and y2 as generatedby the slaves.
from the slaves. In this case there is notorious dif-ference in the time the slave takes to synchronizethe signals. In the case of the three-signal slave, itsynchronizes both signals in less than 0.5 secondswhile the one-signal slave takes approximately 5.5seconds to synchronize. Recall from Section 4 thatthe convergence of all the signals area achieved intwo steps: first, the signal x1 converges and afterthat, the system is completed and the remainingsignals converge.
6 Conclusion
In this paper presented two synchronizationschemes for a new modified Chua oscillator. Themodified Chua chaotic oscillator proposed herehas a different characteristic function f(x). Thenew characteristic function has the property thatit is bounded. The oscillator was proven to bechaotic by means of a Poincare Map. The syn-chronization schemes differ in the number of sig-nals required to synchronize. In the first one, threesignals are required while in the second one onlyone signal does the job. The synchronization timeof the first scheme is much faster than the sec-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1162

0 5 10 15 20−40
−20
0
20
time [s]
x3
y3 - 3s
y3 - 1s
Figure 7: Comparison of x3 and y3 as generatedby the slaves.
ond one. However it may be a drawback in appli-cations like communication systems. The systemwas tested by numerical simulations performed inMatlab/Simulink where it could be demonstratedthe feasibility of both schemes.
Acknowledgments
Mauricio Zapateiro is supported by the fellow-ship from CAPES/Programa Nacional de Pos-Doutorado from Brazil. This work has beenpartially funded by the European Union (Eu-ropean Regional Development Fund) and theSpanish Ministry of Economy and Competitive-ness through the research projects DPI2012-32375/FEDER and DPI2011-28033-C03-01 andby the Government of Catalonia (Spain) through2009SGR1228.
References
Agiza, H. and Yassen, M. (2001). Synchroniza-tion of rossler and chen chaotic dynamicalsystems using active control, Physics Letters
A 278: 191–197.
Benitez, S. and Acho, L. (2007). Impulsive syn-chronization for a new chaotic oscillator, Int.J. of Bifurcation and Chaos 17: 617–623.
Chua, L., Itoh, M., Kocarev, L. and Eckhert, K.(1993). Chaos synchronization in chua’s cir-cuit, J. Circ. Syst. Comput. 3: 99–108.
Chua, L., Komuro, M. and Matsumoto, T. (1986).The double scroll family
”IEEE Transactions
on Circuits and Systems 33: 1073–1118.
Chuang, C., Sun, Y. and Wang, W. (2012). Anovel synchronization scheme with a simplelinear control and guaranteed convergencetime for generalized lorenz chaotic systems,Chaos 22: http://dx.doi: 10.1063/1.4761818(2012).
Feki, M. (2003). An adaptive chaos synchroniza-tion scheme applied to secure communica-tion, Chaos, Solitons and Fractals 18: 141–148.
Hartley, T. (1989). The duffing double scroll,Proc. of the American Control Conference
pp. 419–423.
Huang, J. (2008). Adaptive synchronization be-tween different hyper chaotic systems withfully uncertain parameters, Physics Letters A372: 4799–4804.
Kilic, R. (2006). Experimental study on impulsivesynchronization between two modified chua’scircuits, Nonlinear Analysis: Real World Ap-
plications 7: 1298–1303.
Koofigar, H., Sheikholeslam, F. and Hosseinnia,S. (2011). Robust adaptive synchronizationfor a general class of uncertain chaotic sys-tems with application to chua’s circuit, Chaos18: http://dx.doi.org/10.1063/1.367169.
Park, J. (2006). Chaos synchronization be-tween two different chaotic dynamical sys-tems, Chaos, Solitons and Fractals 27: 549–554.
Pecora, L. and Carroll, T. (1990). Synchronizationin chaotic systems, Phys. Rev. Lett. 64: 821–824.
Salarieh, H. and Alasty, A. (2008). Adaptive chaossynchronization in chua’s systems with noisyparameters, Mathematics and Computer in
Simulation 79: 233–241.
Thomsen, J. (2003). Vibrations and stability: Ad-
vanced Theory, Analysis and Tools, Springer.
Wu, T. and Chen, M. (2002). Chaos control ofthe modified chua’s circuit system, Physica
D 164: 53–58.
Yassen, M. (2003). Adaptive control and syn-chronization of a modified chua’s circuit sys-tem, Applied Mathematics and Computation
135: 113–128.
Zhang, H., Huang, W., Wang, Z. and Chai, T.(2006). Adaptive synchronization betweentwo different chaotic systems with unknownparameters, Physics Letters A 350: 363–366.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1163