Embed Size (px)
Citation preview

Research ArticleChannel Impulse Response Estimation in IEEE 80211p viaData Fusion and MMSE Estimator
Giulio Ministeri and Lorenzo Vangelista
Department of Information Engineering University of Padova Via Gradenigo 6B 35131 Padova Italy
Correspondence should be addressed to Giulio Ministeri ministerdeiunipdit
Received 19 December 2014 Revised 4 March 2015 Accepted 4 March 2015
Academic Editor Martin Reisslein
Copyright copy 2015 G Ministeri and L Vangelista This is an open access article distributed under the Creative CommonsAttribution License which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
Tracking the channel impulse response in systems based on the IEEE 80211p standard the most widely accepted standard for thephysical layer in vehicular area networks (VANETs) is still an open research topic In this paper we aim to improve previouslyproposed channel estimators by utilizing data aided algorithm that includes the channel decoding to enhance the quality ofthe estimated data Moreover we propose a novel technique that exploits information provided by external sensors like GPS orspeedometer usually present in vehicles The algorithm proposed so far has been analyzed in non-line-of-sight link conditions inthis paper we present an analysis of performances in the line-of-sight condition as well Simulations show that both proposals giveconsiderable improvements in terms of packet error rate and channel estimation error in the highway scenario which is surely themost stressing environment for the channel response tracker
1 Introduction
Vehicular ad hoc networks (VANETs) aim at improvingsafety in vehicular transportation systems new cars willbe equipped with devices capable of sharing informationthrough wireless links about the current status preventingcollisions and alarming drivers of incoming hazardous sit-uations However VANETs mean not only safety but alsoconnectivity and Internet access for a wide range of onboardapplications known as infotainment that is information forimproving traffic efficiency and entertainment for drivers andpassengers
The most common VANET physical layer also known asDSRC (direct short range communications) is based on theIEEE 80211p standard [1 2] it uses an orthogonal frequencydivision multiplexing (OFDM) transmission and thanks todifferent symbol modulations and code puncturing schemesit allows the transmission to occur at different rates rangingfrom 3 to 27Mbs
As well known for the performances of any OFDMreceiver the channel estimation is critical However sincethe IEEE 80211p standard inherits most of its features fromthe well known IEEE 80211a standard for wireless local area
networks it does not provide sufficient information (egpilot tones) for the purpose of channel tracking In IEEE80211a wireless links are typically created between an accesspoint always considered in a static position and terminalswhich are assumed to have very slow speed at most 15 kmhand nomadic behaviors that is stationary for most of thetime In VANETs terminals are seldom stationary and theycan have a very wide range of speeds from few kmh inmetropolitan areas up to 150 kmh in highways As showedin many papers [3 4] receiver schemes used for WLANspoorly fit VANETs higher speed of terminals leads to shortercoherence time of the channel so the initial channel response(CR) estimate is valid for a much shorter period
Furthermore the outdoor scenario of VANETs is incontrast with the typical indoor environment for which thewireless local area networks have been designed as alreadypointed out the coherence bandwidth of the channel issmaller and the pilot tones are too few and too far (in thefrequency domain) from each other to enable an adequatechannel estimation and tracking
But as we focus our receiver design for VANET-specificdevices we can get many advantages as suggested in thestandard the VANET devices will likely be equipped with
Hindawi Publishing CorporationInternational Journal of Vehicular TechnologyVolume 2015 Article ID 670482 10 pageshttpdxdoiorg1011552015670482
2 International Journal of Vehicular Technology
OFDM modMapper IFFTCP
insertionInterleaverEncoder +
Channela(i) (kT) tx(nTs)
h (kT nTs)rx(nTs)
W
Figure 1 IEEE 80211p reference system model
a GPS sensor to acquire universal time reference moreoverfor safety purposes they should have direct links with in-carsensors and electronic control units
In this paper we firstly cope with the problem of pilottones deficiencies by using a parametric channel model andthe least square error estimator in the CR estimation processWe then aim to improve the channel tracking process byexploiting information from the in-car sensors and improvethe efficiency of the OFDM receiver in particular we try andestimate the Doppler effect from the information on vehiclespeed provided by GPS or speedometer sensors We focusedon road to vehicle (RTV) in highway scenario where vehiclespeed and Doppler effect have a more direct relationship andwe show that considerable improvements in terms of receiverefficiency can be obtained
2 System Model
The IEEE 80211p protocol physical layer is a frame-basedOFDM transmission with 119873 = 64 subcarriers and a cyclicprefix (CP) of length119873CP = 16
To mitigate the Doppler effects due to the fast-movingenvironment the bandwidth has been halved (with regard toIEEE 80211a) to 119861 = 10MHz thus the sampling period is119879119904= 1119861 = 64 120583s and the OFDM symbol time period is
119879 = (119873 + 119873CP)119879119904 = 8 120583sThe frame structure is presented in Figures 2 and 3 every
frame starts with a sequence of fixed symbols the tenfoldrepetition of the short sequence t
119894 119894 = 1 10 t
119894≜ t119904 is used
by the receiver to detect the frame while the long sequencesymbols T
1= T2≜ T119871are used by the receiver to perform
channel response estimation (CRE)The IEEE 80211p transmitter is presented in Figure 1
the convolutional encoder with constraint length 119871CC theinterleaver and the symbolmodulator have different configu-rations to allow different transmission rates [1]
In our model the received signal is obtained by filteringthe transmitted signal 119905
119909(119899119879119904) with the time-varying channel
impulse response (CIR) ℎ(119896119879 119899119879119904) and adding white Gaus-
sian noise (WGN) with statistical power such that the signalto noise ratio (SNR) equals
SNR =119875119905119909
1205902119908
(1)
We focus in the case where perfect time and frequencysynchronization between transmitter and receiver is alreadyachieved we also assume the time-varying CIR to last nomore than the CP time
119899119879119904ge 119873CP119879119904 997904rArr ℎ (119896119879 119899119879119904) = 0 forall119896 gt 0 (2)
In this case neglecting changes in the ℎ(119896119879 119899119879119904) during
the symbol reception the OFDM demodulated signal can beexpressed in the frequency domain as
Y (119896) = H (119896) sdot X (119896) +W (119896) (3)
whereH(119896) is the discrete Fourier transform (DFT) of the119873-element vector h(119896) which is the sampled CIR ℎ(119905 119899119879
119904) 119899 =
1 119873 at the time instant 119896119879 X(119896) is an 119873 times 119873 diagonalmatrix with data symbols 119886(119894)(119896) in its diagonal and W(119896) isthe additive noise vector
The most common CRE algorithm is based on leastsquare estimation (LSE) the long training sequence symbolsT1and T
2can be expressed as
YT1
= H (0) sdot XT1
YT2
= H (2) sdot XT2
(4)
and applying the zero-forcing criterion [5 page 776] thechannel response is estimated as
H (0) = 12(YT1
+ YT2
) sdot Xminus1T119871
(5)
As mentioned before in WLANs receivers use H(0) toequalize the whole frame since the CR can be assumed to beconstant for the entire frame reception time
The header symbol denoted in Figures 2 and 3 with thename SIGNAL contains information on the frame lengthmodulation and coding schemes used in the subsequentpayload symbols it is encoded with the most robust codeand modulated using BPSK constellation The receiver mustdecode and parse this information before starting to decodethe first payload symbol
In Figure 3 the entire IEEE 80211p frame structure isshown Within the payload symbols 119871pp = 4 subcarriers arefilled with a predefined sequence of pilot symbols 119901
119894(119896) 119894 =
1 119871pp The purpose of these symbols is to track drifts inthe receiver internal oscillator
21 Channel Model Many efforts have been made to charac-terize the vehicular channel in different scenarios and manymodels have been presented In [6] the authors describe howto build a geometric and stochastic mixture model valid onlyfor vehicle to vehicle (VTV) communications in highwaysscenario
In this paper we use the model described in [7] wherespecific model parameters are described for several vehicularcommunication scenarios The model is presented for singleantenna systems it is based on the tapped delay line withthe WSSUS assumption and the Doppler parameters areinferred from vehicles speed We use the implementationprovided in [8] built upon the IT++ framework [9] where
International Journal of Vehicular Technology 3
Signal detectAGC diversity
selection
Coarse frequencyoffset estimation
timing synchronization
GI2
Channel and fine frequencyoffset estimation
GI SIGNAL
Ratelength
GI Data 1 GI Data 2
DataService + data
10 times 16 = 16120583s 2 times 16 + 2 times 64 = 16120583s
16 + 16 = 32120583s
16 + 64 = 8120583s16 + 64 = 8120583s 16 + 64 = 8120583s
1198531 1198532 1198533 1198534 1198535 1198536 1198537 1198538 1198539 11985310 1198271 1198272
Figure 2 IEEE 80211p frame structure
Freq
uenc
y
Time
PreambleHeader (SIGNAL)Pilot
Figure 3 IEEE 80211p frame structure in frequency and timedomain
vehicles speed can be set Hence even if in [7] modelsrsquoparameters are provided for a specific vehicle speed and noreal measurements support it we think this is a reasonablemethod to simulate channels with different vehicle speedscenarios
3 Related Works
Many channel tracking mechanisms have been proposedmost of them cope with the problem of channel estimationand tracking by proposing new transmission schemes
In [10] authors suggest modifying the standard andadding a mid-amble OFDM symbol every 119872 payload sym-bols (where 119872 is fixed and depends on the modulationscheme) so the receiver can recompute the CRE periodicallyAlthough it seems the most reasonable solution to thechannel tracking problem it introduces a strongmodificationto the standard which implies backward compatibility issues
In [11] authors show the benefits given by a differentapproach to classical OFDM scheme using the differentialOFDM (DOFDM) transmission where the demodulationprocess does not need equalization any more Assuming thechannel impulse response to have small variations betweensubsequent OFDM symbols data symbols are demodulatedby taking the difference with the previous one in the samesubcarrier This approach shows good performances how-ever the authors do not explain the transition among the
FFT Equalizer Demapper
Mapper
Deinterleaver
PP-channelestimator
rx(nTs)
PP(k)
119831PP(k)
Figure 4 Pseudopilot channel estimation block scheme
BPSK constellation of the header symbol and the subsequentsymbols
In [12] the authors propose a new algorithm based onthe discrete prolate spheroidal (DPS) sequences Knowing thechannel characteristics the domain of the CR can be tight-ened to a smaller subset leading to the definition of a newtransfer function whose model can be thought of as a con-volutional code iteratively decoded by a BCJR decoder [13]Although this algorithm theoretically works whatever theframe structure authors show that the current IEEE 80211ppreamble and pilot tones structures are not sufficient to letthe decoder converge within a feasible time the pilot tonesdistribution does not satisfy the sampling theorem conditionand thus the BCJR decoder must carry out a lot of iterationsto reach satisfactory performances forcing the system to veryhigh computational efforts Authors conclude by suggestinga backward compatible modification to the standard whichconsists in adding a postamble symbol to the IEEE 80211pframe to be used to increase initial information for thedecoding algorithm Even if this solution can be seen as abackward compatible improvement of the standard addinga postamble symbol increases transmission inefficiency
Proposals which do not require modifications to thestandard came up with the common idea to use data-aidedpilot tones to solve the problem of the lack of pilot tonesthe so-called pseudopilot tones (PP tones) construction Asin Figure 4 after the demodulator the OFDM symbols of theframe payload are brought back to the original values of theconstellation and used to fill the119883PP(119896)matrix and assess thenewer CR estimate with LS estimator
HPP (119896) = Y (119896) sdot Xminus1
PP (119896) (6)
In [14] the authors propose the ldquochannel smoothingrdquo tech-nique exploiting (2) they use the truncated discrete Fouriertransform DFT (DFTTR) matrix to shrink the last coefficient
4 International Journal of Vehicular Technology
of the h(119896) vector H(119896) is computed as a double Fouriertransformation of the vector HPP(119896)
H (119896) = DFT [IDFTTR (HPP (119896))] (7)
where IDFTTR is the truncated inverse DFTIn [15] the correlation of the evolving CR is exploited
to mitigate errors coming from the PP-tones algorithm andthe hard symbol demodulation process With an algorithmsimilar to the recursive least square filter authors update theCR by averaging the old estimation with the newer one Tocope with the noise in low SNR conditions an extra cycle offrequency-domain averaging ismade before the time-domainaveraging step They average the per-subchannel coefficientsof the estimated CR with the adjacent ones
H(119894)119906119901(119896) =
1
2120573 + 1
119894+120573
sum
119905=119894minus120573
H(119905)PP (119896) (8)
and thenmake the final step the recursive average in the timedomain
HSTA (119896) = (1 minus 120574) HSTA (119896 minus 1) + 120574H119906119901 (119896) (9)
Since the averaging is made in both frequency and timedomain they call the method ldquospectral temporal averagingrdquo(STA)
In [16] the authors present ldquoconstructed data pilotrdquo(CDP) method where a heuristic algorithm exploits the timecorrelation of the channel The first CRE HCDP(0) is obtainedby (5)
The subsequent CREs are computed by comparing theequalization results on the same receivedOFDMsymbolY(119896)of the vectors HCDP(119896 minus 1) and the vector HPP(119896) (6) if thedemodulator decides for the same symbol in both cases then
H(119894)CDP (119896) = H(119894)
PP (119896) (10)
otherwise
H(119894)CDP (119896) = H(119894)
CDP (119896 minus 1) (11)
The previously mentioned data-aided estimation algorithmsare based on the demodulator performance which is heavilyinfluenced by the SNR level of the received signal Thecatastrophic effects due to errors in symbol demodulationbring the channel estimators to compute matrix X(119896) withmistaken symbols generating a wrong CRE which as aconsequence brings the symbol demodulator to make manyerrors in the next iteration
We also noticed the complete absence of any considera-tion about the coherence time of theCR In the STAalgorithmthe parameter 120574 is constant and independent of the vehiclespeed and the recursive estimation of the CRs intrinsicallyconsiders the channel to be time correlated even for infinitetime lapses In the CDP algorithm there is no theoreticalanalysis about the coherence time and the time correlationis only implicitly exploited during the comparison of theequalization results
4 Proposed Scheme
A first improvement to the aforementioned methods is toinclude the decoding and recoding steps in the cycle ofpseudopilot channel estimation
As well known the decoder introduces a delay which is atleast equal to the constraint length of the transmitter encoderso for every incoming OFDM symbol we only have at mostthe first 119863 = 119873 minus 119871CC symbols the computation of the CRas in (6) then becomes impossible since the matrix X(119896) isonly partially available with uncertainties on the number andplacements of the missing values
As showed in [17] channel reconstruction techniques likespline or linear interpolation are error prone in case of widespaced or not equally spaced pilot tones
Thanks to sparse vector estimation and the algorithmdescribed in [18] we can overcome this problem
The expression (3) can be rewritten (omitting the additivenoise) as
Y (119896) = X (119896) sdotW sdot h (119896) (12)
where vector h(119896) has length 119871ch and W is the 119873 times 119871chtruncated DFT matrix In fact we fairly suppose the impulseresponse to have only the first 119871ch coefficients to be nonnullas confirmed in [7 19 20] where the authors state that thevehicular CIR typically never last more than 1000 ns (ieexactly 10 samples at 10MHz sampling rate) So we removethe null coefficients from the h(119896) vector and the last119873minus119871chcolumns from theW DFT matrix
We must also take into account the fact that the X(119896)matrix contains only 119863 lt 119873 valid data so we build theselection matrix S with dimension119863times119873 which extracts thenonnull elements of the X(119896)matrix We rewrite (12) as
Y = X sdotW sdot h (13)
where
Y = S sdot Y X = S sdot X sdot S119879 W = S sdotW (14)
If 119863 ge 119871ch for every incoming OFDM symbol 119896 we canretrieve h(119896) using the normal equation
h (119896) = [(X (119896) sdotW)119867
sdot X (119896) sdotW]minus1
sdot (X (119896) sdotW)119867
sdot Y (119896) (15)
And finally we obtain the CR estimation in the frequencydomain as
H (119896) =W sdot h (119896) (16)
We called this modified version of the algorithm presented in[18] PP-MMSE to underline the fact that channel estimationis based on data-aided pilot tones also known as pseudopilot(PP) tones
The condition
119863 ge 119871ch (17)
International Journal of Vehicular Technology 5
is a necessary condition if not fulfilled the matrix
Z (119896) = (X(119896) sdotW)119867
sdot X (119896) sdotW (18)
would not be full rank and it can not be inverted Z(119896) is alsorelated to the variance of the estimation The LS estimatortheory [21 page 47] and the model parameters
120573 = (119883119867
119883)minus1
119883119867
119910 (19)
have variance equal to
var (120573) = 1205902 (119883119867119883)minus1
(20)
where 1205902 is the noise variance and the matrix (119883119867119883)minus1 canbe interpreted as the estimation of the covariance matrix ofthe input vector 119909 which in our case corresponds to thetransmitting symbolsWe can thus rewrite the final varianceof the estimated parameters 120573 as
var (120573) = 1205902
119873 cov (119909)(21)
and conclude that to reduce the variance and enhance theestimation reliability we can only act on the number 119873 ofthe input matrix119883This means in practice that the more thematrix 119883 in (12) is close to be a full rank 119873 times 119873 matrix theless the estimation error of the CR will be (16)
The choice of the trellis depth (depending on the con-strained length of the code) of the Viterbi decoder mustguarantee a number of valid symbols per OFDM frame 119863 ge119871CC minus 119871pp
For every incoming OFDM symbol the receiver decodesthe symbols with the extra Viterbi decoder and pads withzeroes the vector of length 119863 to obtain the right dimension119873 then data are reencoded and reinterleaved Based onthe interleaver shuffling pattern the pilot construction blockselects the subcarrier indexes which contain valid data It alsobuilds the DFT sparse matrixW used by the following blockto compute the H(119896) response according to (15) and (16)
As mentioned we also focus the receiver design onthe VANET scenario and exploit further information aboutvehicle status to improve performances in particular we areinterested in the vehicle speed provided by GPS receiver toestimate the Doppler effectsrsquo parameters
A nonzero speed between transmitter and receiver isthe principal cause of Doppler effects which gives rise tofrequency shift and frequency broadening of the receivedsignal [22 page 88] The Doppler spectrum describes thisphenomenon in terms of the probability density function(pdf) of the incident wavesrsquo magnitude at the differentfrequencies within the signal bandwidth In case of non-line-of-sight (NLOS) communication Rayleigh pdf is used andthe relative Doppler spectrum is the well known Jakesrsquo model
119863(119891) =
1
120587119891119863radic1 minus (119891119891
119863)2
10038161003816100381610038161198911003816100381610038161003816 le 119891119863
0 otherwise(22)
where 119891119863is the maximum frequency of the Doppler spread
On the contrary if there exists a Dominant component theRice process best suits the LOS communication scenarioHere we assume the communication to be in NLOS and wefollow the procedure described in [23] where the authorsapproximate every tap Doppler spectrum with the Jakesmodel Then we will show that for our purposes the errorwe are making in not considering a LOS communication isnegligible
From the Jakes spectrum the autocorrelation function ofthe channel impulse response in the continuous time domainis equal to [5 page 313]
119903 (Δ119905 120591) = int ℎ (119905 120591) ℎlowast
(119905 + Δ119905 120591) 119889119905 (23)
=
119871ch
sum
119899=1
1205902
120591119899
1198690(2120587119891119863Δ119905) 120575 (120591 minus 120591
119897) (24)
where1205902120591119899
is the energy associated to a given delay 120591119899and 1198690(119909)
is the zero-order Bessel functionIn the discrete time domain the CIR becomes
ℎ119899(119905) = ℎ (119905 119899119879119904) (25)
and the correlation function (23) becomes
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198690(2120587119891119863Δ119905) (26)
Thedifference between the tap coefficient at time 119905 and at time119905 + Δ119905 is
Δℎ119899(Δ119905) = ℎ
119899(119905) minus ℎ
119899(119905 + Δ119905) (27)
with statistical power equal to
119864 [1003817100381710038171003817Δℎ119899(Δ119905)
1003817100381710038171003817
2
] = 21205902
ℎ119899
(119903ℎ119899(0) minus 119903
ℎ119899(Δ119905)) (28)
Assuming the channel filter energy is equal to 1 we calculatethe variance of the error we would make if we do not updatethe channel response for a certain number of OFDM symbols119898
1205902
ℎ(119898119879) =
119871ch
sum
119897=0
2 (119903ℎ119899(0) minus 119903
ℎ119899(119898119879))
= 2 (1 minus 1198690(2120587119891119863119898119879))
(29)
Our key idea is to use the current vehicle speed to infer the119891119863parameter by using the formula
119891119863= 119891119888
V119888 (30)
where 119891119888is the carrier frequency 119888 is the speed of light and V
is the vehicle speed acquired from the GPS or in-car sensorWe also suppose that if we do not update the channel for agiven number of symbols we are implicitly considering theCR constant for that time period thus we can fairly averagethe estimated CRs to reduce the estimation variance
6 International Journal of Vehicular Technology
Equalizer
Channelresponseestimator
Channelresponse
estimationblock
Channelresponses
storageblock
Sparsechannel
estimator
Data pilotconstruction
block
Speed valuefrom GPS
FFT Decoder
DecoderEncoder
Demapper
Mapper
Deinterleaver
Interleaver
Figure 5 Structure of the proposed receiver
We conclude that a time-averaging operation of subse-quent CR estimations induces two opposite effects reductionof the additive noise power and increase of the estimationvariance due to CR changes For a certain SNR level wecalculate the experienced SNR value eSNR as
eSNR (119898) = 1
(1119898) (1SNR + sum119898119896=11205902
ℎ(119896119879))
(31)
In Figure 6 the eSNRwith respect to real SNR is shown for anupdate rate of119898 = 1 eSNR is almost equal to real SNR exceptfor high SNR values where the channel variability within thesingle OFDM symbol is noticeable
In practice for every incoming frame our receiver esti-mates the SNR level from the long training sequence symbolsas
SNR = 12119873
119873
sum
119899=1
10038171003817100381710038171003817119884(119899)
1198791
minus 119884(119899)
1198792
10038171003817100381710038171003817
2
(32)
as explained in [24] then using (31) with different value of119898 it seeks for the best channel updating rates that is theupdating ratewhich guarantees the highest value of the eSNR
To analyze the case of a LOS communication we have firstto change the per-tap autocorrelation function (26) The firstcoefficient ℎ
1includes a dominant component due to the LOS
path and the Rice distribution should be used (26) should besubstituted with the formula in [25]
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(33)
where 120581 represents the power ratio between the LOS compo-nents and the scatterers and it is easy to show that with 120581 = 0(33) becomes (26) Taking the real part of the autocorrelationfunction (33) and following the same procedure as for the
NLOS case the final formula for the error variance (29)becomes
1205902
ℎ(119898119879) = 2 [1 minus (1 minus 120590
2
ℎ1
) 1198690(2120587119891119863119898119879)]
minus 1205902
ℎ1
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(34)
where 1205902ℎ1
is the fraction of the energy of the first tap withrespect to the total channel energy Finally if we substitute1205902
ℎ(119898119879) in (31) we obtain the experienced eSNR in case of
NLOS communicationsEven though the second-order statistics of Rayleigh and
Rice processes are quite different in our case the error wemake by always considering a NLOS communication is stillmoderate and bounded in particular situations In fact we arenot interested in the value of eSNR but in the rate 119898 whichmaximizes (31) so the error we make is located only wherethe best update rates for NLOS and LOS communications aredifferent
In Figure 7 we show the locations of the error for 120581 = 10The grey areas evidence the SNR zones where we encountererrors and give an idea of the loss of SNR we face bybeing committed to the wrong value of 119898 Hence to avoidincreasing the complexity due to 120581 factor estimation [26 27]the receiver can always assume a non-LOS communicationand computes the channel update rate through (31)
The final receiver structure is shown in Figure 5 fromthe main receiver chain demodulated symbols are passed tothe extra Viterbi decoder The output is then padded withzeros to obtain the right length for the interleaver and symbolmapper The reconstructed OFDM symbol is then processedby the PP-MMSE algorithm which returns H(119896) and thevector is stored in a circular memory buffer which saves thelast 119898 vectors H(119896) The last block exploits the vehicle speed
International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Vehicular Technology
OFDM modMapper IFFTCP
insertionInterleaverEncoder +
Channela(i) (kT) tx(nTs)
h (kT nTs)rx(nTs)
W
Figure 1 IEEE 80211p reference system model
a GPS sensor to acquire universal time reference moreoverfor safety purposes they should have direct links with in-carsensors and electronic control units
In this paper we firstly cope with the problem of pilottones deficiencies by using a parametric channel model andthe least square error estimator in the CR estimation processWe then aim to improve the channel tracking process byexploiting information from the in-car sensors and improvethe efficiency of the OFDM receiver in particular we try andestimate the Doppler effect from the information on vehiclespeed provided by GPS or speedometer sensors We focusedon road to vehicle (RTV) in highway scenario where vehiclespeed and Doppler effect have a more direct relationship andwe show that considerable improvements in terms of receiverefficiency can be obtained
2 System Model
The IEEE 80211p protocol physical layer is a frame-basedOFDM transmission with 119873 = 64 subcarriers and a cyclicprefix (CP) of length119873CP = 16
To mitigate the Doppler effects due to the fast-movingenvironment the bandwidth has been halved (with regard toIEEE 80211a) to 119861 = 10MHz thus the sampling period is119879119904= 1119861 = 64 120583s and the OFDM symbol time period is
119879 = (119873 + 119873CP)119879119904 = 8 120583sThe frame structure is presented in Figures 2 and 3 every
frame starts with a sequence of fixed symbols the tenfoldrepetition of the short sequence t
119894 119894 = 1 10 t
119894≜ t119904 is used
by the receiver to detect the frame while the long sequencesymbols T
1= T2≜ T119871are used by the receiver to perform
channel response estimation (CRE)The IEEE 80211p transmitter is presented in Figure 1
the convolutional encoder with constraint length 119871CC theinterleaver and the symbolmodulator have different configu-rations to allow different transmission rates [1]
In our model the received signal is obtained by filteringthe transmitted signal 119905
119909(119899119879119904) with the time-varying channel
impulse response (CIR) ℎ(119896119879 119899119879119904) and adding white Gaus-
sian noise (WGN) with statistical power such that the signalto noise ratio (SNR) equals
SNR =119875119905119909
1205902119908
(1)
We focus in the case where perfect time and frequencysynchronization between transmitter and receiver is alreadyachieved we also assume the time-varying CIR to last nomore than the CP time
119899119879119904ge 119873CP119879119904 997904rArr ℎ (119896119879 119899119879119904) = 0 forall119896 gt 0 (2)
In this case neglecting changes in the ℎ(119896119879 119899119879119904) during
the symbol reception the OFDM demodulated signal can beexpressed in the frequency domain as
Y (119896) = H (119896) sdot X (119896) +W (119896) (3)
whereH(119896) is the discrete Fourier transform (DFT) of the119873-element vector h(119896) which is the sampled CIR ℎ(119905 119899119879
119904) 119899 =
1 119873 at the time instant 119896119879 X(119896) is an 119873 times 119873 diagonalmatrix with data symbols 119886(119894)(119896) in its diagonal and W(119896) isthe additive noise vector
The most common CRE algorithm is based on leastsquare estimation (LSE) the long training sequence symbolsT1and T
2can be expressed as
YT1
= H (0) sdot XT1
YT2
= H (2) sdot XT2
(4)
and applying the zero-forcing criterion [5 page 776] thechannel response is estimated as
H (0) = 12(YT1
+ YT2
) sdot Xminus1T119871
(5)
As mentioned before in WLANs receivers use H(0) toequalize the whole frame since the CR can be assumed to beconstant for the entire frame reception time
The header symbol denoted in Figures 2 and 3 with thename SIGNAL contains information on the frame lengthmodulation and coding schemes used in the subsequentpayload symbols it is encoded with the most robust codeand modulated using BPSK constellation The receiver mustdecode and parse this information before starting to decodethe first payload symbol
In Figure 3 the entire IEEE 80211p frame structure isshown Within the payload symbols 119871pp = 4 subcarriers arefilled with a predefined sequence of pilot symbols 119901
119894(119896) 119894 =
1 119871pp The purpose of these symbols is to track drifts inthe receiver internal oscillator
21 Channel Model Many efforts have been made to charac-terize the vehicular channel in different scenarios and manymodels have been presented In [6] the authors describe howto build a geometric and stochastic mixture model valid onlyfor vehicle to vehicle (VTV) communications in highwaysscenario
In this paper we use the model described in [7] wherespecific model parameters are described for several vehicularcommunication scenarios The model is presented for singleantenna systems it is based on the tapped delay line withthe WSSUS assumption and the Doppler parameters areinferred from vehicles speed We use the implementationprovided in [8] built upon the IT++ framework [9] where
International Journal of Vehicular Technology 3
Signal detectAGC diversity
selection
Coarse frequencyoffset estimation
timing synchronization
GI2
Channel and fine frequencyoffset estimation
GI SIGNAL
Ratelength
GI Data 1 GI Data 2
DataService + data
10 times 16 = 16120583s 2 times 16 + 2 times 64 = 16120583s
16 + 16 = 32120583s
16 + 64 = 8120583s16 + 64 = 8120583s 16 + 64 = 8120583s
1198531 1198532 1198533 1198534 1198535 1198536 1198537 1198538 1198539 11985310 1198271 1198272
Figure 2 IEEE 80211p frame structure
Freq
uenc
y
Time
PreambleHeader (SIGNAL)Pilot
Figure 3 IEEE 80211p frame structure in frequency and timedomain
vehicles speed can be set Hence even if in [7] modelsrsquoparameters are provided for a specific vehicle speed and noreal measurements support it we think this is a reasonablemethod to simulate channels with different vehicle speedscenarios
3 Related Works
Many channel tracking mechanisms have been proposedmost of them cope with the problem of channel estimationand tracking by proposing new transmission schemes
In [10] authors suggest modifying the standard andadding a mid-amble OFDM symbol every 119872 payload sym-bols (where 119872 is fixed and depends on the modulationscheme) so the receiver can recompute the CRE periodicallyAlthough it seems the most reasonable solution to thechannel tracking problem it introduces a strongmodificationto the standard which implies backward compatibility issues
In [11] authors show the benefits given by a differentapproach to classical OFDM scheme using the differentialOFDM (DOFDM) transmission where the demodulationprocess does not need equalization any more Assuming thechannel impulse response to have small variations betweensubsequent OFDM symbols data symbols are demodulatedby taking the difference with the previous one in the samesubcarrier This approach shows good performances how-ever the authors do not explain the transition among the
FFT Equalizer Demapper
Mapper
Deinterleaver
PP-channelestimator
rx(nTs)
PP(k)
119831PP(k)
Figure 4 Pseudopilot channel estimation block scheme
BPSK constellation of the header symbol and the subsequentsymbols
In [12] the authors propose a new algorithm based onthe discrete prolate spheroidal (DPS) sequences Knowing thechannel characteristics the domain of the CR can be tight-ened to a smaller subset leading to the definition of a newtransfer function whose model can be thought of as a con-volutional code iteratively decoded by a BCJR decoder [13]Although this algorithm theoretically works whatever theframe structure authors show that the current IEEE 80211ppreamble and pilot tones structures are not sufficient to letthe decoder converge within a feasible time the pilot tonesdistribution does not satisfy the sampling theorem conditionand thus the BCJR decoder must carry out a lot of iterationsto reach satisfactory performances forcing the system to veryhigh computational efforts Authors conclude by suggestinga backward compatible modification to the standard whichconsists in adding a postamble symbol to the IEEE 80211pframe to be used to increase initial information for thedecoding algorithm Even if this solution can be seen as abackward compatible improvement of the standard addinga postamble symbol increases transmission inefficiency
Proposals which do not require modifications to thestandard came up with the common idea to use data-aidedpilot tones to solve the problem of the lack of pilot tonesthe so-called pseudopilot tones (PP tones) construction Asin Figure 4 after the demodulator the OFDM symbols of theframe payload are brought back to the original values of theconstellation and used to fill the119883PP(119896)matrix and assess thenewer CR estimate with LS estimator
HPP (119896) = Y (119896) sdot Xminus1
PP (119896) (6)
In [14] the authors propose the ldquochannel smoothingrdquo tech-nique exploiting (2) they use the truncated discrete Fouriertransform DFT (DFTTR) matrix to shrink the last coefficient
4 International Journal of Vehicular Technology
of the h(119896) vector H(119896) is computed as a double Fouriertransformation of the vector HPP(119896)
H (119896) = DFT [IDFTTR (HPP (119896))] (7)
where IDFTTR is the truncated inverse DFTIn [15] the correlation of the evolving CR is exploited
to mitigate errors coming from the PP-tones algorithm andthe hard symbol demodulation process With an algorithmsimilar to the recursive least square filter authors update theCR by averaging the old estimation with the newer one Tocope with the noise in low SNR conditions an extra cycle offrequency-domain averaging ismade before the time-domainaveraging step They average the per-subchannel coefficientsof the estimated CR with the adjacent ones
H(119894)119906119901(119896) =
1
2120573 + 1
119894+120573
sum
119905=119894minus120573
H(119905)PP (119896) (8)
and thenmake the final step the recursive average in the timedomain
HSTA (119896) = (1 minus 120574) HSTA (119896 minus 1) + 120574H119906119901 (119896) (9)
Since the averaging is made in both frequency and timedomain they call the method ldquospectral temporal averagingrdquo(STA)
In [16] the authors present ldquoconstructed data pilotrdquo(CDP) method where a heuristic algorithm exploits the timecorrelation of the channel The first CRE HCDP(0) is obtainedby (5)
The subsequent CREs are computed by comparing theequalization results on the same receivedOFDMsymbolY(119896)of the vectors HCDP(119896 minus 1) and the vector HPP(119896) (6) if thedemodulator decides for the same symbol in both cases then
H(119894)CDP (119896) = H(119894)
PP (119896) (10)
otherwise
H(119894)CDP (119896) = H(119894)
CDP (119896 minus 1) (11)
The previously mentioned data-aided estimation algorithmsare based on the demodulator performance which is heavilyinfluenced by the SNR level of the received signal Thecatastrophic effects due to errors in symbol demodulationbring the channel estimators to compute matrix X(119896) withmistaken symbols generating a wrong CRE which as aconsequence brings the symbol demodulator to make manyerrors in the next iteration
We also noticed the complete absence of any considera-tion about the coherence time of theCR In the STAalgorithmthe parameter 120574 is constant and independent of the vehiclespeed and the recursive estimation of the CRs intrinsicallyconsiders the channel to be time correlated even for infinitetime lapses In the CDP algorithm there is no theoreticalanalysis about the coherence time and the time correlationis only implicitly exploited during the comparison of theequalization results
4 Proposed Scheme
A first improvement to the aforementioned methods is toinclude the decoding and recoding steps in the cycle ofpseudopilot channel estimation
As well known the decoder introduces a delay which is atleast equal to the constraint length of the transmitter encoderso for every incoming OFDM symbol we only have at mostthe first 119863 = 119873 minus 119871CC symbols the computation of the CRas in (6) then becomes impossible since the matrix X(119896) isonly partially available with uncertainties on the number andplacements of the missing values
As showed in [17] channel reconstruction techniques likespline or linear interpolation are error prone in case of widespaced or not equally spaced pilot tones
Thanks to sparse vector estimation and the algorithmdescribed in [18] we can overcome this problem
The expression (3) can be rewritten (omitting the additivenoise) as
Y (119896) = X (119896) sdotW sdot h (119896) (12)
where vector h(119896) has length 119871ch and W is the 119873 times 119871chtruncated DFT matrix In fact we fairly suppose the impulseresponse to have only the first 119871ch coefficients to be nonnullas confirmed in [7 19 20] where the authors state that thevehicular CIR typically never last more than 1000 ns (ieexactly 10 samples at 10MHz sampling rate) So we removethe null coefficients from the h(119896) vector and the last119873minus119871chcolumns from theW DFT matrix
We must also take into account the fact that the X(119896)matrix contains only 119863 lt 119873 valid data so we build theselection matrix S with dimension119863times119873 which extracts thenonnull elements of the X(119896)matrix We rewrite (12) as
Y = X sdotW sdot h (13)
where
Y = S sdot Y X = S sdot X sdot S119879 W = S sdotW (14)
If 119863 ge 119871ch for every incoming OFDM symbol 119896 we canretrieve h(119896) using the normal equation
h (119896) = [(X (119896) sdotW)119867
sdot X (119896) sdotW]minus1
sdot (X (119896) sdotW)119867
sdot Y (119896) (15)
And finally we obtain the CR estimation in the frequencydomain as
H (119896) =W sdot h (119896) (16)
We called this modified version of the algorithm presented in[18] PP-MMSE to underline the fact that channel estimationis based on data-aided pilot tones also known as pseudopilot(PP) tones
The condition
119863 ge 119871ch (17)
International Journal of Vehicular Technology 5
is a necessary condition if not fulfilled the matrix
Z (119896) = (X(119896) sdotW)119867
sdot X (119896) sdotW (18)
would not be full rank and it can not be inverted Z(119896) is alsorelated to the variance of the estimation The LS estimatortheory [21 page 47] and the model parameters
120573 = (119883119867
119883)minus1
119883119867
119910 (19)
have variance equal to
var (120573) = 1205902 (119883119867119883)minus1
(20)
where 1205902 is the noise variance and the matrix (119883119867119883)minus1 canbe interpreted as the estimation of the covariance matrix ofthe input vector 119909 which in our case corresponds to thetransmitting symbolsWe can thus rewrite the final varianceof the estimated parameters 120573 as
var (120573) = 1205902
119873 cov (119909)(21)
and conclude that to reduce the variance and enhance theestimation reliability we can only act on the number 119873 ofthe input matrix119883This means in practice that the more thematrix 119883 in (12) is close to be a full rank 119873 times 119873 matrix theless the estimation error of the CR will be (16)
The choice of the trellis depth (depending on the con-strained length of the code) of the Viterbi decoder mustguarantee a number of valid symbols per OFDM frame 119863 ge119871CC minus 119871pp
For every incoming OFDM symbol the receiver decodesthe symbols with the extra Viterbi decoder and pads withzeroes the vector of length 119863 to obtain the right dimension119873 then data are reencoded and reinterleaved Based onthe interleaver shuffling pattern the pilot construction blockselects the subcarrier indexes which contain valid data It alsobuilds the DFT sparse matrixW used by the following blockto compute the H(119896) response according to (15) and (16)
As mentioned we also focus the receiver design onthe VANET scenario and exploit further information aboutvehicle status to improve performances in particular we areinterested in the vehicle speed provided by GPS receiver toestimate the Doppler effectsrsquo parameters
A nonzero speed between transmitter and receiver isthe principal cause of Doppler effects which gives rise tofrequency shift and frequency broadening of the receivedsignal [22 page 88] The Doppler spectrum describes thisphenomenon in terms of the probability density function(pdf) of the incident wavesrsquo magnitude at the differentfrequencies within the signal bandwidth In case of non-line-of-sight (NLOS) communication Rayleigh pdf is used andthe relative Doppler spectrum is the well known Jakesrsquo model
119863(119891) =
1
120587119891119863radic1 minus (119891119891
119863)2
10038161003816100381610038161198911003816100381610038161003816 le 119891119863
0 otherwise(22)
where 119891119863is the maximum frequency of the Doppler spread
On the contrary if there exists a Dominant component theRice process best suits the LOS communication scenarioHere we assume the communication to be in NLOS and wefollow the procedure described in [23] where the authorsapproximate every tap Doppler spectrum with the Jakesmodel Then we will show that for our purposes the errorwe are making in not considering a LOS communication isnegligible
From the Jakes spectrum the autocorrelation function ofthe channel impulse response in the continuous time domainis equal to [5 page 313]
119903 (Δ119905 120591) = int ℎ (119905 120591) ℎlowast
(119905 + Δ119905 120591) 119889119905 (23)
=
119871ch
sum
119899=1
1205902
120591119899
1198690(2120587119891119863Δ119905) 120575 (120591 minus 120591
119897) (24)
where1205902120591119899
is the energy associated to a given delay 120591119899and 1198690(119909)
is the zero-order Bessel functionIn the discrete time domain the CIR becomes
ℎ119899(119905) = ℎ (119905 119899119879119904) (25)
and the correlation function (23) becomes
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198690(2120587119891119863Δ119905) (26)
Thedifference between the tap coefficient at time 119905 and at time119905 + Δ119905 is
Δℎ119899(Δ119905) = ℎ
119899(119905) minus ℎ
119899(119905 + Δ119905) (27)
with statistical power equal to
119864 [1003817100381710038171003817Δℎ119899(Δ119905)
1003817100381710038171003817
2
] = 21205902
ℎ119899
(119903ℎ119899(0) minus 119903
ℎ119899(Δ119905)) (28)
Assuming the channel filter energy is equal to 1 we calculatethe variance of the error we would make if we do not updatethe channel response for a certain number of OFDM symbols119898
1205902
ℎ(119898119879) =
119871ch
sum
119897=0
2 (119903ℎ119899(0) minus 119903
ℎ119899(119898119879))
= 2 (1 minus 1198690(2120587119891119863119898119879))
(29)
Our key idea is to use the current vehicle speed to infer the119891119863parameter by using the formula
119891119863= 119891119888
V119888 (30)
where 119891119888is the carrier frequency 119888 is the speed of light and V
is the vehicle speed acquired from the GPS or in-car sensorWe also suppose that if we do not update the channel for agiven number of symbols we are implicitly considering theCR constant for that time period thus we can fairly averagethe estimated CRs to reduce the estimation variance
6 International Journal of Vehicular Technology
Equalizer
Channelresponseestimator
Channelresponse
estimationblock
Channelresponses
storageblock
Sparsechannel
estimator
Data pilotconstruction
block
Speed valuefrom GPS
FFT Decoder
DecoderEncoder
Demapper
Mapper
Deinterleaver
Interleaver
Figure 5 Structure of the proposed receiver
We conclude that a time-averaging operation of subse-quent CR estimations induces two opposite effects reductionof the additive noise power and increase of the estimationvariance due to CR changes For a certain SNR level wecalculate the experienced SNR value eSNR as
eSNR (119898) = 1
(1119898) (1SNR + sum119898119896=11205902
ℎ(119896119879))
(31)
In Figure 6 the eSNRwith respect to real SNR is shown for anupdate rate of119898 = 1 eSNR is almost equal to real SNR exceptfor high SNR values where the channel variability within thesingle OFDM symbol is noticeable
In practice for every incoming frame our receiver esti-mates the SNR level from the long training sequence symbolsas
SNR = 12119873
119873
sum
119899=1
10038171003817100381710038171003817119884(119899)
1198791
minus 119884(119899)
1198792
10038171003817100381710038171003817
2
(32)
as explained in [24] then using (31) with different value of119898 it seeks for the best channel updating rates that is theupdating ratewhich guarantees the highest value of the eSNR
To analyze the case of a LOS communication we have firstto change the per-tap autocorrelation function (26) The firstcoefficient ℎ
1includes a dominant component due to the LOS
path and the Rice distribution should be used (26) should besubstituted with the formula in [25]
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(33)
where 120581 represents the power ratio between the LOS compo-nents and the scatterers and it is easy to show that with 120581 = 0(33) becomes (26) Taking the real part of the autocorrelationfunction (33) and following the same procedure as for the
NLOS case the final formula for the error variance (29)becomes
1205902
ℎ(119898119879) = 2 [1 minus (1 minus 120590
2
ℎ1
) 1198690(2120587119891119863119898119879)]
minus 1205902
ℎ1
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(34)
where 1205902ℎ1
is the fraction of the energy of the first tap withrespect to the total channel energy Finally if we substitute1205902
ℎ(119898119879) in (31) we obtain the experienced eSNR in case of
NLOS communicationsEven though the second-order statistics of Rayleigh and
Rice processes are quite different in our case the error wemake by always considering a NLOS communication is stillmoderate and bounded in particular situations In fact we arenot interested in the value of eSNR but in the rate 119898 whichmaximizes (31) so the error we make is located only wherethe best update rates for NLOS and LOS communications aredifferent
In Figure 7 we show the locations of the error for 120581 = 10The grey areas evidence the SNR zones where we encountererrors and give an idea of the loss of SNR we face bybeing committed to the wrong value of 119898 Hence to avoidincreasing the complexity due to 120581 factor estimation [26 27]the receiver can always assume a non-LOS communicationand computes the channel update rate through (31)
The final receiver structure is shown in Figure 5 fromthe main receiver chain demodulated symbols are passed tothe extra Viterbi decoder The output is then padded withzeros to obtain the right length for the interleaver and symbolmapper The reconstructed OFDM symbol is then processedby the PP-MMSE algorithm which returns H(119896) and thevector is stored in a circular memory buffer which saves thelast 119898 vectors H(119896) The last block exploits the vehicle speed
International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Vehicular Technology 3
Signal detectAGC diversity
selection
Coarse frequencyoffset estimation
timing synchronization
GI2
Channel and fine frequencyoffset estimation
GI SIGNAL
Ratelength
GI Data 1 GI Data 2
DataService + data
10 times 16 = 16120583s 2 times 16 + 2 times 64 = 16120583s
16 + 16 = 32120583s
16 + 64 = 8120583s16 + 64 = 8120583s 16 + 64 = 8120583s
1198531 1198532 1198533 1198534 1198535 1198536 1198537 1198538 1198539 11985310 1198271 1198272
Figure 2 IEEE 80211p frame structure
Freq
uenc
y
Time
PreambleHeader (SIGNAL)Pilot
Figure 3 IEEE 80211p frame structure in frequency and timedomain
vehicles speed can be set Hence even if in [7] modelsrsquoparameters are provided for a specific vehicle speed and noreal measurements support it we think this is a reasonablemethod to simulate channels with different vehicle speedscenarios
3 Related Works
Many channel tracking mechanisms have been proposedmost of them cope with the problem of channel estimationand tracking by proposing new transmission schemes
In [10] authors suggest modifying the standard andadding a mid-amble OFDM symbol every 119872 payload sym-bols (where 119872 is fixed and depends on the modulationscheme) so the receiver can recompute the CRE periodicallyAlthough it seems the most reasonable solution to thechannel tracking problem it introduces a strongmodificationto the standard which implies backward compatibility issues
In [11] authors show the benefits given by a differentapproach to classical OFDM scheme using the differentialOFDM (DOFDM) transmission where the demodulationprocess does not need equalization any more Assuming thechannel impulse response to have small variations betweensubsequent OFDM symbols data symbols are demodulatedby taking the difference with the previous one in the samesubcarrier This approach shows good performances how-ever the authors do not explain the transition among the
FFT Equalizer Demapper
Mapper
Deinterleaver
PP-channelestimator
rx(nTs)
PP(k)
119831PP(k)
Figure 4 Pseudopilot channel estimation block scheme
BPSK constellation of the header symbol and the subsequentsymbols
In [12] the authors propose a new algorithm based onthe discrete prolate spheroidal (DPS) sequences Knowing thechannel characteristics the domain of the CR can be tight-ened to a smaller subset leading to the definition of a newtransfer function whose model can be thought of as a con-volutional code iteratively decoded by a BCJR decoder [13]Although this algorithm theoretically works whatever theframe structure authors show that the current IEEE 80211ppreamble and pilot tones structures are not sufficient to letthe decoder converge within a feasible time the pilot tonesdistribution does not satisfy the sampling theorem conditionand thus the BCJR decoder must carry out a lot of iterationsto reach satisfactory performances forcing the system to veryhigh computational efforts Authors conclude by suggestinga backward compatible modification to the standard whichconsists in adding a postamble symbol to the IEEE 80211pframe to be used to increase initial information for thedecoding algorithm Even if this solution can be seen as abackward compatible improvement of the standard addinga postamble symbol increases transmission inefficiency
Proposals which do not require modifications to thestandard came up with the common idea to use data-aidedpilot tones to solve the problem of the lack of pilot tonesthe so-called pseudopilot tones (PP tones) construction Asin Figure 4 after the demodulator the OFDM symbols of theframe payload are brought back to the original values of theconstellation and used to fill the119883PP(119896)matrix and assess thenewer CR estimate with LS estimator
HPP (119896) = Y (119896) sdot Xminus1
PP (119896) (6)
In [14] the authors propose the ldquochannel smoothingrdquo tech-nique exploiting (2) they use the truncated discrete Fouriertransform DFT (DFTTR) matrix to shrink the last coefficient
4 International Journal of Vehicular Technology
of the h(119896) vector H(119896) is computed as a double Fouriertransformation of the vector HPP(119896)
H (119896) = DFT [IDFTTR (HPP (119896))] (7)
where IDFTTR is the truncated inverse DFTIn [15] the correlation of the evolving CR is exploited
to mitigate errors coming from the PP-tones algorithm andthe hard symbol demodulation process With an algorithmsimilar to the recursive least square filter authors update theCR by averaging the old estimation with the newer one Tocope with the noise in low SNR conditions an extra cycle offrequency-domain averaging ismade before the time-domainaveraging step They average the per-subchannel coefficientsof the estimated CR with the adjacent ones
H(119894)119906119901(119896) =
1
2120573 + 1
119894+120573
sum
119905=119894minus120573
H(119905)PP (119896) (8)
and thenmake the final step the recursive average in the timedomain
HSTA (119896) = (1 minus 120574) HSTA (119896 minus 1) + 120574H119906119901 (119896) (9)
Since the averaging is made in both frequency and timedomain they call the method ldquospectral temporal averagingrdquo(STA)
In [16] the authors present ldquoconstructed data pilotrdquo(CDP) method where a heuristic algorithm exploits the timecorrelation of the channel The first CRE HCDP(0) is obtainedby (5)
The subsequent CREs are computed by comparing theequalization results on the same receivedOFDMsymbolY(119896)of the vectors HCDP(119896 minus 1) and the vector HPP(119896) (6) if thedemodulator decides for the same symbol in both cases then
H(119894)CDP (119896) = H(119894)
PP (119896) (10)
otherwise
H(119894)CDP (119896) = H(119894)
CDP (119896 minus 1) (11)
The previously mentioned data-aided estimation algorithmsare based on the demodulator performance which is heavilyinfluenced by the SNR level of the received signal Thecatastrophic effects due to errors in symbol demodulationbring the channel estimators to compute matrix X(119896) withmistaken symbols generating a wrong CRE which as aconsequence brings the symbol demodulator to make manyerrors in the next iteration
We also noticed the complete absence of any considera-tion about the coherence time of theCR In the STAalgorithmthe parameter 120574 is constant and independent of the vehiclespeed and the recursive estimation of the CRs intrinsicallyconsiders the channel to be time correlated even for infinitetime lapses In the CDP algorithm there is no theoreticalanalysis about the coherence time and the time correlationis only implicitly exploited during the comparison of theequalization results
4 Proposed Scheme
A first improvement to the aforementioned methods is toinclude the decoding and recoding steps in the cycle ofpseudopilot channel estimation
As well known the decoder introduces a delay which is atleast equal to the constraint length of the transmitter encoderso for every incoming OFDM symbol we only have at mostthe first 119863 = 119873 minus 119871CC symbols the computation of the CRas in (6) then becomes impossible since the matrix X(119896) isonly partially available with uncertainties on the number andplacements of the missing values
As showed in [17] channel reconstruction techniques likespline or linear interpolation are error prone in case of widespaced or not equally spaced pilot tones
Thanks to sparse vector estimation and the algorithmdescribed in [18] we can overcome this problem
The expression (3) can be rewritten (omitting the additivenoise) as
Y (119896) = X (119896) sdotW sdot h (119896) (12)
where vector h(119896) has length 119871ch and W is the 119873 times 119871chtruncated DFT matrix In fact we fairly suppose the impulseresponse to have only the first 119871ch coefficients to be nonnullas confirmed in [7 19 20] where the authors state that thevehicular CIR typically never last more than 1000 ns (ieexactly 10 samples at 10MHz sampling rate) So we removethe null coefficients from the h(119896) vector and the last119873minus119871chcolumns from theW DFT matrix
We must also take into account the fact that the X(119896)matrix contains only 119863 lt 119873 valid data so we build theselection matrix S with dimension119863times119873 which extracts thenonnull elements of the X(119896)matrix We rewrite (12) as
Y = X sdotW sdot h (13)
where
Y = S sdot Y X = S sdot X sdot S119879 W = S sdotW (14)
If 119863 ge 119871ch for every incoming OFDM symbol 119896 we canretrieve h(119896) using the normal equation
h (119896) = [(X (119896) sdotW)119867
sdot X (119896) sdotW]minus1
sdot (X (119896) sdotW)119867
sdot Y (119896) (15)
And finally we obtain the CR estimation in the frequencydomain as
H (119896) =W sdot h (119896) (16)
We called this modified version of the algorithm presented in[18] PP-MMSE to underline the fact that channel estimationis based on data-aided pilot tones also known as pseudopilot(PP) tones
The condition
119863 ge 119871ch (17)
International Journal of Vehicular Technology 5
is a necessary condition if not fulfilled the matrix
Z (119896) = (X(119896) sdotW)119867
sdot X (119896) sdotW (18)
would not be full rank and it can not be inverted Z(119896) is alsorelated to the variance of the estimation The LS estimatortheory [21 page 47] and the model parameters
120573 = (119883119867
119883)minus1
119883119867
119910 (19)
have variance equal to
var (120573) = 1205902 (119883119867119883)minus1
(20)
where 1205902 is the noise variance and the matrix (119883119867119883)minus1 canbe interpreted as the estimation of the covariance matrix ofthe input vector 119909 which in our case corresponds to thetransmitting symbolsWe can thus rewrite the final varianceof the estimated parameters 120573 as
var (120573) = 1205902
119873 cov (119909)(21)
and conclude that to reduce the variance and enhance theestimation reliability we can only act on the number 119873 ofthe input matrix119883This means in practice that the more thematrix 119883 in (12) is close to be a full rank 119873 times 119873 matrix theless the estimation error of the CR will be (16)
The choice of the trellis depth (depending on the con-strained length of the code) of the Viterbi decoder mustguarantee a number of valid symbols per OFDM frame 119863 ge119871CC minus 119871pp
For every incoming OFDM symbol the receiver decodesthe symbols with the extra Viterbi decoder and pads withzeroes the vector of length 119863 to obtain the right dimension119873 then data are reencoded and reinterleaved Based onthe interleaver shuffling pattern the pilot construction blockselects the subcarrier indexes which contain valid data It alsobuilds the DFT sparse matrixW used by the following blockto compute the H(119896) response according to (15) and (16)
As mentioned we also focus the receiver design onthe VANET scenario and exploit further information aboutvehicle status to improve performances in particular we areinterested in the vehicle speed provided by GPS receiver toestimate the Doppler effectsrsquo parameters
A nonzero speed between transmitter and receiver isthe principal cause of Doppler effects which gives rise tofrequency shift and frequency broadening of the receivedsignal [22 page 88] The Doppler spectrum describes thisphenomenon in terms of the probability density function(pdf) of the incident wavesrsquo magnitude at the differentfrequencies within the signal bandwidth In case of non-line-of-sight (NLOS) communication Rayleigh pdf is used andthe relative Doppler spectrum is the well known Jakesrsquo model
119863(119891) =
1
120587119891119863radic1 minus (119891119891
119863)2
10038161003816100381610038161198911003816100381610038161003816 le 119891119863
0 otherwise(22)
where 119891119863is the maximum frequency of the Doppler spread
On the contrary if there exists a Dominant component theRice process best suits the LOS communication scenarioHere we assume the communication to be in NLOS and wefollow the procedure described in [23] where the authorsapproximate every tap Doppler spectrum with the Jakesmodel Then we will show that for our purposes the errorwe are making in not considering a LOS communication isnegligible
From the Jakes spectrum the autocorrelation function ofthe channel impulse response in the continuous time domainis equal to [5 page 313]
119903 (Δ119905 120591) = int ℎ (119905 120591) ℎlowast
(119905 + Δ119905 120591) 119889119905 (23)
=
119871ch
sum
119899=1
1205902
120591119899
1198690(2120587119891119863Δ119905) 120575 (120591 minus 120591
119897) (24)
where1205902120591119899
is the energy associated to a given delay 120591119899and 1198690(119909)
is the zero-order Bessel functionIn the discrete time domain the CIR becomes
ℎ119899(119905) = ℎ (119905 119899119879119904) (25)
and the correlation function (23) becomes
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198690(2120587119891119863Δ119905) (26)
Thedifference between the tap coefficient at time 119905 and at time119905 + Δ119905 is
Δℎ119899(Δ119905) = ℎ
119899(119905) minus ℎ
119899(119905 + Δ119905) (27)
with statistical power equal to
119864 [1003817100381710038171003817Δℎ119899(Δ119905)
1003817100381710038171003817
2
] = 21205902
ℎ119899
(119903ℎ119899(0) minus 119903
ℎ119899(Δ119905)) (28)
Assuming the channel filter energy is equal to 1 we calculatethe variance of the error we would make if we do not updatethe channel response for a certain number of OFDM symbols119898
1205902
ℎ(119898119879) =
119871ch
sum
119897=0
2 (119903ℎ119899(0) minus 119903
ℎ119899(119898119879))
= 2 (1 minus 1198690(2120587119891119863119898119879))
(29)
Our key idea is to use the current vehicle speed to infer the119891119863parameter by using the formula
119891119863= 119891119888
V119888 (30)
where 119891119888is the carrier frequency 119888 is the speed of light and V
is the vehicle speed acquired from the GPS or in-car sensorWe also suppose that if we do not update the channel for agiven number of symbols we are implicitly considering theCR constant for that time period thus we can fairly averagethe estimated CRs to reduce the estimation variance
6 International Journal of Vehicular Technology
Equalizer
Channelresponseestimator
Channelresponse
estimationblock
Channelresponses
storageblock
Sparsechannel
estimator
Data pilotconstruction
block
Speed valuefrom GPS
FFT Decoder
DecoderEncoder
Demapper
Mapper
Deinterleaver
Interleaver
Figure 5 Structure of the proposed receiver
We conclude that a time-averaging operation of subse-quent CR estimations induces two opposite effects reductionof the additive noise power and increase of the estimationvariance due to CR changes For a certain SNR level wecalculate the experienced SNR value eSNR as
eSNR (119898) = 1
(1119898) (1SNR + sum119898119896=11205902
ℎ(119896119879))
(31)
In Figure 6 the eSNRwith respect to real SNR is shown for anupdate rate of119898 = 1 eSNR is almost equal to real SNR exceptfor high SNR values where the channel variability within thesingle OFDM symbol is noticeable
In practice for every incoming frame our receiver esti-mates the SNR level from the long training sequence symbolsas
SNR = 12119873
119873
sum
119899=1
10038171003817100381710038171003817119884(119899)
1198791
minus 119884(119899)
1198792
10038171003817100381710038171003817
2
(32)
as explained in [24] then using (31) with different value of119898 it seeks for the best channel updating rates that is theupdating ratewhich guarantees the highest value of the eSNR
To analyze the case of a LOS communication we have firstto change the per-tap autocorrelation function (26) The firstcoefficient ℎ
1includes a dominant component due to the LOS
path and the Rice distribution should be used (26) should besubstituted with the formula in [25]
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(33)
where 120581 represents the power ratio between the LOS compo-nents and the scatterers and it is easy to show that with 120581 = 0(33) becomes (26) Taking the real part of the autocorrelationfunction (33) and following the same procedure as for the
NLOS case the final formula for the error variance (29)becomes
1205902
ℎ(119898119879) = 2 [1 minus (1 minus 120590
2
ℎ1
) 1198690(2120587119891119863119898119879)]
minus 1205902
ℎ1
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(34)
where 1205902ℎ1
is the fraction of the energy of the first tap withrespect to the total channel energy Finally if we substitute1205902
ℎ(119898119879) in (31) we obtain the experienced eSNR in case of
NLOS communicationsEven though the second-order statistics of Rayleigh and
Rice processes are quite different in our case the error wemake by always considering a NLOS communication is stillmoderate and bounded in particular situations In fact we arenot interested in the value of eSNR but in the rate 119898 whichmaximizes (31) so the error we make is located only wherethe best update rates for NLOS and LOS communications aredifferent
In Figure 7 we show the locations of the error for 120581 = 10The grey areas evidence the SNR zones where we encountererrors and give an idea of the loss of SNR we face bybeing committed to the wrong value of 119898 Hence to avoidincreasing the complexity due to 120581 factor estimation [26 27]the receiver can always assume a non-LOS communicationand computes the channel update rate through (31)
The final receiver structure is shown in Figure 5 fromthe main receiver chain demodulated symbols are passed tothe extra Viterbi decoder The output is then padded withzeros to obtain the right length for the interleaver and symbolmapper The reconstructed OFDM symbol is then processedby the PP-MMSE algorithm which returns H(119896) and thevector is stored in a circular memory buffer which saves thelast 119898 vectors H(119896) The last block exploits the vehicle speed
International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Vehicular Technology
of the h(119896) vector H(119896) is computed as a double Fouriertransformation of the vector HPP(119896)
H (119896) = DFT [IDFTTR (HPP (119896))] (7)
where IDFTTR is the truncated inverse DFTIn [15] the correlation of the evolving CR is exploited
to mitigate errors coming from the PP-tones algorithm andthe hard symbol demodulation process With an algorithmsimilar to the recursive least square filter authors update theCR by averaging the old estimation with the newer one Tocope with the noise in low SNR conditions an extra cycle offrequency-domain averaging ismade before the time-domainaveraging step They average the per-subchannel coefficientsof the estimated CR with the adjacent ones
H(119894)119906119901(119896) =
1
2120573 + 1
119894+120573
sum
119905=119894minus120573
H(119905)PP (119896) (8)
and thenmake the final step the recursive average in the timedomain
HSTA (119896) = (1 minus 120574) HSTA (119896 minus 1) + 120574H119906119901 (119896) (9)
Since the averaging is made in both frequency and timedomain they call the method ldquospectral temporal averagingrdquo(STA)
In [16] the authors present ldquoconstructed data pilotrdquo(CDP) method where a heuristic algorithm exploits the timecorrelation of the channel The first CRE HCDP(0) is obtainedby (5)
The subsequent CREs are computed by comparing theequalization results on the same receivedOFDMsymbolY(119896)of the vectors HCDP(119896 minus 1) and the vector HPP(119896) (6) if thedemodulator decides for the same symbol in both cases then
H(119894)CDP (119896) = H(119894)
PP (119896) (10)
otherwise
H(119894)CDP (119896) = H(119894)
CDP (119896 minus 1) (11)
The previously mentioned data-aided estimation algorithmsare based on the demodulator performance which is heavilyinfluenced by the SNR level of the received signal Thecatastrophic effects due to errors in symbol demodulationbring the channel estimators to compute matrix X(119896) withmistaken symbols generating a wrong CRE which as aconsequence brings the symbol demodulator to make manyerrors in the next iteration
We also noticed the complete absence of any considera-tion about the coherence time of theCR In the STAalgorithmthe parameter 120574 is constant and independent of the vehiclespeed and the recursive estimation of the CRs intrinsicallyconsiders the channel to be time correlated even for infinitetime lapses In the CDP algorithm there is no theoreticalanalysis about the coherence time and the time correlationis only implicitly exploited during the comparison of theequalization results
4 Proposed Scheme
A first improvement to the aforementioned methods is toinclude the decoding and recoding steps in the cycle ofpseudopilot channel estimation
As well known the decoder introduces a delay which is atleast equal to the constraint length of the transmitter encoderso for every incoming OFDM symbol we only have at mostthe first 119863 = 119873 minus 119871CC symbols the computation of the CRas in (6) then becomes impossible since the matrix X(119896) isonly partially available with uncertainties on the number andplacements of the missing values
As showed in [17] channel reconstruction techniques likespline or linear interpolation are error prone in case of widespaced or not equally spaced pilot tones
Thanks to sparse vector estimation and the algorithmdescribed in [18] we can overcome this problem
The expression (3) can be rewritten (omitting the additivenoise) as
Y (119896) = X (119896) sdotW sdot h (119896) (12)
where vector h(119896) has length 119871ch and W is the 119873 times 119871chtruncated DFT matrix In fact we fairly suppose the impulseresponse to have only the first 119871ch coefficients to be nonnullas confirmed in [7 19 20] where the authors state that thevehicular CIR typically never last more than 1000 ns (ieexactly 10 samples at 10MHz sampling rate) So we removethe null coefficients from the h(119896) vector and the last119873minus119871chcolumns from theW DFT matrix
We must also take into account the fact that the X(119896)matrix contains only 119863 lt 119873 valid data so we build theselection matrix S with dimension119863times119873 which extracts thenonnull elements of the X(119896)matrix We rewrite (12) as
Y = X sdotW sdot h (13)
where
Y = S sdot Y X = S sdot X sdot S119879 W = S sdotW (14)
If 119863 ge 119871ch for every incoming OFDM symbol 119896 we canretrieve h(119896) using the normal equation
h (119896) = [(X (119896) sdotW)119867
sdot X (119896) sdotW]minus1
sdot (X (119896) sdotW)119867
sdot Y (119896) (15)
And finally we obtain the CR estimation in the frequencydomain as
H (119896) =W sdot h (119896) (16)
We called this modified version of the algorithm presented in[18] PP-MMSE to underline the fact that channel estimationis based on data-aided pilot tones also known as pseudopilot(PP) tones
The condition
119863 ge 119871ch (17)
International Journal of Vehicular Technology 5
is a necessary condition if not fulfilled the matrix
Z (119896) = (X(119896) sdotW)119867
sdot X (119896) sdotW (18)
would not be full rank and it can not be inverted Z(119896) is alsorelated to the variance of the estimation The LS estimatortheory [21 page 47] and the model parameters
120573 = (119883119867
119883)minus1
119883119867
119910 (19)
have variance equal to
var (120573) = 1205902 (119883119867119883)minus1
(20)
where 1205902 is the noise variance and the matrix (119883119867119883)minus1 canbe interpreted as the estimation of the covariance matrix ofthe input vector 119909 which in our case corresponds to thetransmitting symbolsWe can thus rewrite the final varianceof the estimated parameters 120573 as
var (120573) = 1205902
119873 cov (119909)(21)
and conclude that to reduce the variance and enhance theestimation reliability we can only act on the number 119873 ofthe input matrix119883This means in practice that the more thematrix 119883 in (12) is close to be a full rank 119873 times 119873 matrix theless the estimation error of the CR will be (16)
The choice of the trellis depth (depending on the con-strained length of the code) of the Viterbi decoder mustguarantee a number of valid symbols per OFDM frame 119863 ge119871CC minus 119871pp
For every incoming OFDM symbol the receiver decodesthe symbols with the extra Viterbi decoder and pads withzeroes the vector of length 119863 to obtain the right dimension119873 then data are reencoded and reinterleaved Based onthe interleaver shuffling pattern the pilot construction blockselects the subcarrier indexes which contain valid data It alsobuilds the DFT sparse matrixW used by the following blockto compute the H(119896) response according to (15) and (16)
As mentioned we also focus the receiver design onthe VANET scenario and exploit further information aboutvehicle status to improve performances in particular we areinterested in the vehicle speed provided by GPS receiver toestimate the Doppler effectsrsquo parameters
A nonzero speed between transmitter and receiver isthe principal cause of Doppler effects which gives rise tofrequency shift and frequency broadening of the receivedsignal [22 page 88] The Doppler spectrum describes thisphenomenon in terms of the probability density function(pdf) of the incident wavesrsquo magnitude at the differentfrequencies within the signal bandwidth In case of non-line-of-sight (NLOS) communication Rayleigh pdf is used andthe relative Doppler spectrum is the well known Jakesrsquo model
119863(119891) =
1
120587119891119863radic1 minus (119891119891
119863)2
10038161003816100381610038161198911003816100381610038161003816 le 119891119863
0 otherwise(22)
where 119891119863is the maximum frequency of the Doppler spread
On the contrary if there exists a Dominant component theRice process best suits the LOS communication scenarioHere we assume the communication to be in NLOS and wefollow the procedure described in [23] where the authorsapproximate every tap Doppler spectrum with the Jakesmodel Then we will show that for our purposes the errorwe are making in not considering a LOS communication isnegligible
From the Jakes spectrum the autocorrelation function ofthe channel impulse response in the continuous time domainis equal to [5 page 313]
119903 (Δ119905 120591) = int ℎ (119905 120591) ℎlowast
(119905 + Δ119905 120591) 119889119905 (23)
=
119871ch
sum
119899=1
1205902
120591119899
1198690(2120587119891119863Δ119905) 120575 (120591 minus 120591
119897) (24)
where1205902120591119899
is the energy associated to a given delay 120591119899and 1198690(119909)
is the zero-order Bessel functionIn the discrete time domain the CIR becomes
ℎ119899(119905) = ℎ (119905 119899119879119904) (25)
and the correlation function (23) becomes
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198690(2120587119891119863Δ119905) (26)
Thedifference between the tap coefficient at time 119905 and at time119905 + Δ119905 is
Δℎ119899(Δ119905) = ℎ
119899(119905) minus ℎ
119899(119905 + Δ119905) (27)
with statistical power equal to
119864 [1003817100381710038171003817Δℎ119899(Δ119905)
1003817100381710038171003817
2
] = 21205902
ℎ119899
(119903ℎ119899(0) minus 119903
ℎ119899(Δ119905)) (28)
Assuming the channel filter energy is equal to 1 we calculatethe variance of the error we would make if we do not updatethe channel response for a certain number of OFDM symbols119898
1205902
ℎ(119898119879) =
119871ch
sum
119897=0
2 (119903ℎ119899(0) minus 119903
ℎ119899(119898119879))
= 2 (1 minus 1198690(2120587119891119863119898119879))
(29)
Our key idea is to use the current vehicle speed to infer the119891119863parameter by using the formula
119891119863= 119891119888
V119888 (30)
where 119891119888is the carrier frequency 119888 is the speed of light and V
is the vehicle speed acquired from the GPS or in-car sensorWe also suppose that if we do not update the channel for agiven number of symbols we are implicitly considering theCR constant for that time period thus we can fairly averagethe estimated CRs to reduce the estimation variance
6 International Journal of Vehicular Technology
Equalizer
Channelresponseestimator
Channelresponse
estimationblock
Channelresponses
storageblock
Sparsechannel
estimator
Data pilotconstruction
block
Speed valuefrom GPS
FFT Decoder
DecoderEncoder
Demapper
Mapper
Deinterleaver
Interleaver
Figure 5 Structure of the proposed receiver
We conclude that a time-averaging operation of subse-quent CR estimations induces two opposite effects reductionof the additive noise power and increase of the estimationvariance due to CR changes For a certain SNR level wecalculate the experienced SNR value eSNR as
eSNR (119898) = 1
(1119898) (1SNR + sum119898119896=11205902
ℎ(119896119879))
(31)
In Figure 6 the eSNRwith respect to real SNR is shown for anupdate rate of119898 = 1 eSNR is almost equal to real SNR exceptfor high SNR values where the channel variability within thesingle OFDM symbol is noticeable
In practice for every incoming frame our receiver esti-mates the SNR level from the long training sequence symbolsas
SNR = 12119873
119873
sum
119899=1
10038171003817100381710038171003817119884(119899)
1198791
minus 119884(119899)
1198792
10038171003817100381710038171003817
2
(32)
as explained in [24] then using (31) with different value of119898 it seeks for the best channel updating rates that is theupdating ratewhich guarantees the highest value of the eSNR
To analyze the case of a LOS communication we have firstto change the per-tap autocorrelation function (26) The firstcoefficient ℎ
1includes a dominant component due to the LOS
path and the Rice distribution should be used (26) should besubstituted with the formula in [25]
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(33)
where 120581 represents the power ratio between the LOS compo-nents and the scatterers and it is easy to show that with 120581 = 0(33) becomes (26) Taking the real part of the autocorrelationfunction (33) and following the same procedure as for the
NLOS case the final formula for the error variance (29)becomes
1205902
ℎ(119898119879) = 2 [1 minus (1 minus 120590
2
ℎ1
) 1198690(2120587119891119863119898119879)]
minus 1205902
ℎ1
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(34)
where 1205902ℎ1
is the fraction of the energy of the first tap withrespect to the total channel energy Finally if we substitute1205902
ℎ(119898119879) in (31) we obtain the experienced eSNR in case of
NLOS communicationsEven though the second-order statistics of Rayleigh and
Rice processes are quite different in our case the error wemake by always considering a NLOS communication is stillmoderate and bounded in particular situations In fact we arenot interested in the value of eSNR but in the rate 119898 whichmaximizes (31) so the error we make is located only wherethe best update rates for NLOS and LOS communications aredifferent
In Figure 7 we show the locations of the error for 120581 = 10The grey areas evidence the SNR zones where we encountererrors and give an idea of the loss of SNR we face bybeing committed to the wrong value of 119898 Hence to avoidincreasing the complexity due to 120581 factor estimation [26 27]the receiver can always assume a non-LOS communicationand computes the channel update rate through (31)
The final receiver structure is shown in Figure 5 fromthe main receiver chain demodulated symbols are passed tothe extra Viterbi decoder The output is then padded withzeros to obtain the right length for the interleaver and symbolmapper The reconstructed OFDM symbol is then processedby the PP-MMSE algorithm which returns H(119896) and thevector is stored in a circular memory buffer which saves thelast 119898 vectors H(119896) The last block exploits the vehicle speed
International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Vehicular Technology 5
is a necessary condition if not fulfilled the matrix
Z (119896) = (X(119896) sdotW)119867
sdot X (119896) sdotW (18)
would not be full rank and it can not be inverted Z(119896) is alsorelated to the variance of the estimation The LS estimatortheory [21 page 47] and the model parameters
120573 = (119883119867
119883)minus1
119883119867
119910 (19)
have variance equal to
var (120573) = 1205902 (119883119867119883)minus1
(20)
where 1205902 is the noise variance and the matrix (119883119867119883)minus1 canbe interpreted as the estimation of the covariance matrix ofthe input vector 119909 which in our case corresponds to thetransmitting symbolsWe can thus rewrite the final varianceof the estimated parameters 120573 as
var (120573) = 1205902
119873 cov (119909)(21)
and conclude that to reduce the variance and enhance theestimation reliability we can only act on the number 119873 ofthe input matrix119883This means in practice that the more thematrix 119883 in (12) is close to be a full rank 119873 times 119873 matrix theless the estimation error of the CR will be (16)
The choice of the trellis depth (depending on the con-strained length of the code) of the Viterbi decoder mustguarantee a number of valid symbols per OFDM frame 119863 ge119871CC minus 119871pp
For every incoming OFDM symbol the receiver decodesthe symbols with the extra Viterbi decoder and pads withzeroes the vector of length 119863 to obtain the right dimension119873 then data are reencoded and reinterleaved Based onthe interleaver shuffling pattern the pilot construction blockselects the subcarrier indexes which contain valid data It alsobuilds the DFT sparse matrixW used by the following blockto compute the H(119896) response according to (15) and (16)
As mentioned we also focus the receiver design onthe VANET scenario and exploit further information aboutvehicle status to improve performances in particular we areinterested in the vehicle speed provided by GPS receiver toestimate the Doppler effectsrsquo parameters
A nonzero speed between transmitter and receiver isthe principal cause of Doppler effects which gives rise tofrequency shift and frequency broadening of the receivedsignal [22 page 88] The Doppler spectrum describes thisphenomenon in terms of the probability density function(pdf) of the incident wavesrsquo magnitude at the differentfrequencies within the signal bandwidth In case of non-line-of-sight (NLOS) communication Rayleigh pdf is used andthe relative Doppler spectrum is the well known Jakesrsquo model
119863(119891) =
1
120587119891119863radic1 minus (119891119891
119863)2
10038161003816100381610038161198911003816100381610038161003816 le 119891119863
0 otherwise(22)
where 119891119863is the maximum frequency of the Doppler spread
On the contrary if there exists a Dominant component theRice process best suits the LOS communication scenarioHere we assume the communication to be in NLOS and wefollow the procedure described in [23] where the authorsapproximate every tap Doppler spectrum with the Jakesmodel Then we will show that for our purposes the errorwe are making in not considering a LOS communication isnegligible
From the Jakes spectrum the autocorrelation function ofthe channel impulse response in the continuous time domainis equal to [5 page 313]
119903 (Δ119905 120591) = int ℎ (119905 120591) ℎlowast
(119905 + Δ119905 120591) 119889119905 (23)
=
119871ch
sum
119899=1
1205902
120591119899
1198690(2120587119891119863Δ119905) 120575 (120591 minus 120591
119897) (24)
where1205902120591119899
is the energy associated to a given delay 120591119899and 1198690(119909)
is the zero-order Bessel functionIn the discrete time domain the CIR becomes
ℎ119899(119905) = ℎ (119905 119899119879119904) (25)
and the correlation function (23) becomes
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198690(2120587119891119863Δ119905) (26)
Thedifference between the tap coefficient at time 119905 and at time119905 + Δ119905 is
Δℎ119899(Δ119905) = ℎ
119899(119905) minus ℎ
119899(119905 + Δ119905) (27)
with statistical power equal to
119864 [1003817100381710038171003817Δℎ119899(Δ119905)
1003817100381710038171003817
2
] = 21205902
ℎ119899
(119903ℎ119899(0) minus 119903
ℎ119899(Δ119905)) (28)
Assuming the channel filter energy is equal to 1 we calculatethe variance of the error we would make if we do not updatethe channel response for a certain number of OFDM symbols119898
1205902
ℎ(119898119879) =
119871ch
sum
119897=0
2 (119903ℎ119899(0) minus 119903
ℎ119899(119898119879))
= 2 (1 minus 1198690(2120587119891119863119898119879))
(29)
Our key idea is to use the current vehicle speed to infer the119891119863parameter by using the formula
119891119863= 119891119888
V119888 (30)
where 119891119888is the carrier frequency 119888 is the speed of light and V
is the vehicle speed acquired from the GPS or in-car sensorWe also suppose that if we do not update the channel for agiven number of symbols we are implicitly considering theCR constant for that time period thus we can fairly averagethe estimated CRs to reduce the estimation variance
6 International Journal of Vehicular Technology
Equalizer
Channelresponseestimator
Channelresponse
estimationblock
Channelresponses
storageblock
Sparsechannel
estimator
Data pilotconstruction
block
Speed valuefrom GPS
FFT Decoder
DecoderEncoder
Demapper
Mapper
Deinterleaver
Interleaver
Figure 5 Structure of the proposed receiver
We conclude that a time-averaging operation of subse-quent CR estimations induces two opposite effects reductionof the additive noise power and increase of the estimationvariance due to CR changes For a certain SNR level wecalculate the experienced SNR value eSNR as
eSNR (119898) = 1
(1119898) (1SNR + sum119898119896=11205902
ℎ(119896119879))
(31)
In Figure 6 the eSNRwith respect to real SNR is shown for anupdate rate of119898 = 1 eSNR is almost equal to real SNR exceptfor high SNR values where the channel variability within thesingle OFDM symbol is noticeable
In practice for every incoming frame our receiver esti-mates the SNR level from the long training sequence symbolsas
SNR = 12119873
119873
sum
119899=1
10038171003817100381710038171003817119884(119899)
1198791
minus 119884(119899)
1198792
10038171003817100381710038171003817
2
(32)
as explained in [24] then using (31) with different value of119898 it seeks for the best channel updating rates that is theupdating ratewhich guarantees the highest value of the eSNR
To analyze the case of a LOS communication we have firstto change the per-tap autocorrelation function (26) The firstcoefficient ℎ
1includes a dominant component due to the LOS
path and the Rice distribution should be used (26) should besubstituted with the formula in [25]
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(33)
where 120581 represents the power ratio between the LOS compo-nents and the scatterers and it is easy to show that with 120581 = 0(33) becomes (26) Taking the real part of the autocorrelationfunction (33) and following the same procedure as for the
NLOS case the final formula for the error variance (29)becomes
1205902
ℎ(119898119879) = 2 [1 minus (1 minus 120590
2
ℎ1
) 1198690(2120587119891119863119898119879)]
minus 1205902
ℎ1
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(34)
where 1205902ℎ1
is the fraction of the energy of the first tap withrespect to the total channel energy Finally if we substitute1205902
ℎ(119898119879) in (31) we obtain the experienced eSNR in case of
NLOS communicationsEven though the second-order statistics of Rayleigh and
Rice processes are quite different in our case the error wemake by always considering a NLOS communication is stillmoderate and bounded in particular situations In fact we arenot interested in the value of eSNR but in the rate 119898 whichmaximizes (31) so the error we make is located only wherethe best update rates for NLOS and LOS communications aredifferent
In Figure 7 we show the locations of the error for 120581 = 10The grey areas evidence the SNR zones where we encountererrors and give an idea of the loss of SNR we face bybeing committed to the wrong value of 119898 Hence to avoidincreasing the complexity due to 120581 factor estimation [26 27]the receiver can always assume a non-LOS communicationand computes the channel update rate through (31)
The final receiver structure is shown in Figure 5 fromthe main receiver chain demodulated symbols are passed tothe extra Viterbi decoder The output is then padded withzeros to obtain the right length for the interleaver and symbolmapper The reconstructed OFDM symbol is then processedby the PP-MMSE algorithm which returns H(119896) and thevector is stored in a circular memory buffer which saves thelast 119898 vectors H(119896) The last block exploits the vehicle speed
International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Vehicular Technology
Equalizer
Channelresponseestimator
Channelresponse
estimationblock
Channelresponses
storageblock
Sparsechannel
estimator
Data pilotconstruction
block
Speed valuefrom GPS
FFT Decoder
DecoderEncoder
Demapper
Mapper
Deinterleaver
Interleaver
Figure 5 Structure of the proposed receiver
We conclude that a time-averaging operation of subse-quent CR estimations induces two opposite effects reductionof the additive noise power and increase of the estimationvariance due to CR changes For a certain SNR level wecalculate the experienced SNR value eSNR as
eSNR (119898) = 1
(1119898) (1SNR + sum119898119896=11205902
ℎ(119896119879))
(31)
In Figure 6 the eSNRwith respect to real SNR is shown for anupdate rate of119898 = 1 eSNR is almost equal to real SNR exceptfor high SNR values where the channel variability within thesingle OFDM symbol is noticeable
In practice for every incoming frame our receiver esti-mates the SNR level from the long training sequence symbolsas
SNR = 12119873
119873
sum
119899=1
10038171003817100381710038171003817119884(119899)
1198791
minus 119884(119899)
1198792
10038171003817100381710038171003817
2
(32)
as explained in [24] then using (31) with different value of119898 it seeks for the best channel updating rates that is theupdating ratewhich guarantees the highest value of the eSNR
To analyze the case of a LOS communication we have firstto change the per-tap autocorrelation function (26) The firstcoefficient ℎ
1includes a dominant component due to the LOS
path and the Rice distribution should be used (26) should besubstituted with the formula in [25]
119903ℎ119899(Δ119905) = 120590
2
ℎ119899
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(33)
where 120581 represents the power ratio between the LOS compo-nents and the scatterers and it is easy to show that with 120581 = 0(33) becomes (26) Taking the real part of the autocorrelationfunction (33) and following the same procedure as for the
NLOS case the final formula for the error variance (29)becomes
1205902
ℎ(119898119879) = 2 [1 minus (1 minus 120590
2
ℎ1
) 1198690(2120587119891119863119898119879)]
minus 1205902
ℎ1
1198680(radic1205812 minus 41205872119891
2
119863Δ1199052 + 1198954120587120581119891
119863Δ119905)
1198680(120581)
(34)
where 1205902ℎ1
is the fraction of the energy of the first tap withrespect to the total channel energy Finally if we substitute1205902
ℎ(119898119879) in (31) we obtain the experienced eSNR in case of
NLOS communicationsEven though the second-order statistics of Rayleigh and
Rice processes are quite different in our case the error wemake by always considering a NLOS communication is stillmoderate and bounded in particular situations In fact we arenot interested in the value of eSNR but in the rate 119898 whichmaximizes (31) so the error we make is located only wherethe best update rates for NLOS and LOS communications aredifferent
In Figure 7 we show the locations of the error for 120581 = 10The grey areas evidence the SNR zones where we encountererrors and give an idea of the loss of SNR we face bybeing committed to the wrong value of 119898 Hence to avoidincreasing the complexity due to 120581 factor estimation [26 27]the receiver can always assume a non-LOS communicationand computes the channel update rate through (31)
The final receiver structure is shown in Figure 5 fromthe main receiver chain demodulated symbols are passed tothe extra Viterbi decoder The output is then padded withzeros to obtain the right length for the interleaver and symbolmapper The reconstructed OFDM symbol is then processedby the PP-MMSE algorithm which returns H(119896) and thevector is stored in a circular memory buffer which saves thelast 119898 vectors H(119896) The last block exploits the vehicle speed
International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Vehicular Technology 7
0 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35048
121620242832
SNR
eSN
R
12
48
Figure 6 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates
68
10121416182022242628303234
eSN
R
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35SNR
Rayleigh m = 2Rayleigh m = 1
Rayleigh m = 4Rayleigh m = 8
Rice m = 1Rice m = 2Rice m = 4Rice m = 8
Figure 7 eSNR with respect to real SNR at a vehicle speed of100 kmh for different channel update rates Rice compared toRayleigh processes
and averages the responses and finally passes the current CRestimation to the equalizer
5 Simulation Setup
We used the channel model implementation provided by [8]We limited our simulations to RTV in highway scenarioconsidering a vehicle speed of 150 kmh
For such a scenario we simulated transmissions withdifferent modulation techniques adopting the most robustcoding scheme we build two frames with different payloadlengths the former with 200 OFDM symbols to simulate atypical IPv6 packet transmission for infotainment applica-tions and the latter with 50 OFDM symbols to reproduce thetransmission of packets for safety applications
We compared our solution to the aforementionedreceivers we simulated as well a common WLAN receiverwhere no tracking technique is used We set the STA [15] andCDP [16] parameters as suggested by the authors in order to
ensure the best performances We assume the receivers aresynchronised in both time and frequency
The extra Viterbi decoder trellis depth has been selectedto be a multiple of the inverse of all the possible codingrates to avoid problems in the zero padding process due tofractional bits As mentioned we have selected the longestdepth that guarantees the PP-MMSE algorithm to workin every transmission scheme (17) which turns out to be18 We set the available channel update rates to include atmost 8 symbols since a higher rate does not show relevantimprovements while costing more in terms of memory Wealso pruned the set to be 1 2 4 8 to simplify averagingoperations To highlight the improvement given by the speeddata exploitation we also simulated the receiver performancewithout the averaging step that is removing the channelstorage block showed in Figure 5
6 Results
As a first note in Figures 8 9 and 10 we can see that the clas-sical WLANs receiver does not work in the VANET environ-ment no matter the choice of the modulation or SNR level
In Figure 8 packet error rates (PER) results with BPSKmodulation are shown in this case the proposed receiverand the PP-MMSE receiver show very poor performancescompared to others this happens because of the channel esti-mation block This particular transmission scheme providesonly few valid subcarrier indexes 12 indexes worsening theperformances of the PP-MMSE channel estimator in thiscase the only possible solution would be to shorten the depthof the Viterbi decoder however we think that the rewardof improving the results in this scenario is not worth thedeteriorationwewould have in all othermodulation schemes
The up-and-down slope of the proposed scheme in bothFigures 8(a) and 8(b) happens exactly at the point wherethe channel averaging rate changes from the current level tothe next one finally reaching as expected the same perfor-mances of the PP-MMSE receiver when the rate becomes 1
In Figure 9 performances of the reception of QPSK-modulated frames are shown the proposed receiver achievesthe best performances Here the Viterbi decoder provides 28valid subcarriers per OFDM symbol guaranteeing to the PP-MMSE algorithm enough data to compute a precise channelestimation The PER shows the improvement due to channelaveraging the gain is about 2 dB
Comparing Figure 9 with Figure 8 it can be noticed thatthe proposed receiver obtains better results with the QPSKtransmission than with the BPSK one Figure 8 shows thateven the STA and CDP receivers in the BPSK scenario haveworse performances than the proposed scheme with theQPSK
In Figure 10 a 16-QAM transmission has been used herethe number of valid subcarrier indexes reaches 32 and thegap between proposed receivers and the other ones becomesgreater On the contrary the enhancement due to channelaveraging keeps the same 2 dB as the PER curve starts todecrease
In Figures 9 and 10 improvements of the PP-MMSEalgorithm in data symbols reconstruction are shown As
8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Vehicular Technology
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
PP-MSEProposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
10minus5
(a)
GOMP
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30SNR
Pack
et er
ror r
ate
LS-notrackSTACDP
Proposed
12
4
8
Chan
nel u
pdat
e rat
e
100
10minus1
10minus2
10minus3
10minus4
(b)
Figure 8 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames BPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14SNR
PP-MSE
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
LS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 9 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames QPSK modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(a)
0 2 4 6 8 10 12 14 16 18 20 22SNR
12
4
8
Chan
nel u
pdat
e rat
e
Pack
et er
ror r
ate
100
10minus1
10minus2
10minus3
10minus4
10minus5
PP-MSELS-notrackSTACDP
Proposed
(b)
Figure 10 Packet error rates for (a) 50 and (b) 200 OFDM payload symbols frames 16-QAM modulation is used and the vehicle travels at150 kmh The piecewise constant line represents the selected channel update rates based on eSNR
International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Vehicular Technology 9
0 4 8 12 16 20 24 28 32 36 40SNR
MSE
GOMP
102
101
100
10minus1
LS-notrackSTACDP
Proposed
Figure 11 Channel estimation mean squared errors comparisonfor the proposed receiver schemes The transmission scheme usedis QPSK with code rate 12 as in Figure 9(a)
previouslymentioned hard demodulation showsweakness inlow SNR scenarios by including the decoder in the channelestimation process data-aided pseudopilot tones are lesserror prone As a consequence the PER of the PP-MMSE andproposed receivers start their descending slope at lower SNRvalues with respect to the STA and CDP receivers
In Figure 11 mean squared error ratios of channel esti-mates are compared Since all channel estimation algorithmsare based on the pseudopilot algorithm which assumes thatthe modulation scheme is known the error has been com-puted only on frames for which the frame headers have beendecoded correctly and the modulation scheme has been rec-ognized At low SNR values the STA receiver performancesare comparablewith the ones of the proposed receivers whileas the SNR increases the STA receiver reaches an asymptoticvalue and the error gets flat This trend compared with thePER performances seems to conflict the cause may lie inthe averaging process of the channel estimator even if thechannel estimation shows robustness to symbol errors in caseof low SNR it bounds the performances in case of high SNRvalues where channel variability is predominant
7 Conclusion and Future Work
A new receiver scheme for VANETs devices has been pro-posed in particular we focused on the channel responseestimator which plays an essential role in the overall receiverperformances in terms of bit error rate and packet error rateWe compared our solution to previous works using a wellestablished and widely used channel model
We showed a novel approach in which informationtaken from external sensors is used to improve the receiverefficiency We focused on a specific scenario the RTV wherechannel variance and Doppler effects are strictly connectedto vehicle speed The RTV scenario pays an important rolein vehicular networks especially regarding safety Improvingreceiver performances in such a scenario means warningdrivers more in advance providing more time to react
to dangers We simulated different transmission rates anddemonstrated that the channel update rate must be chosenbased on the Doppler spread and not on the modulationtechnique as previous proposals have done
In the future we aim to exploit these extra data to gatherinformation useful in every environment always keeping thefocus on the highways scenario where channel variability ismore relevant
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] ldquoIEEE standard for information technology-local and metro-politan area networks-specific requirementsmdashpart 11 wirelesslan medium access control (MAC) and physical layer (PHY)specifications amendment 6 wireless access in vehicular envi-ronmentsrdquo IEEE Std 80211p- 2010 (Amendment to IEEE Std80211-2007 as amended by IEEE Std 80211k-2008 IEEE Std80211r-2008 IEEE Std 80211y-2008 IEEE Std 80211n-2009and IEEE Std 80211w-2009) pp 1ndash51 15 2010
[2] IEEE IEEE Standard for Information Technology-Telecommu-nications and Information Exchange between Systems Localand Metropolitan Area Networks-Specific Requirements Part 11Wireless LAN Medium Access Control (MAC) and PhysicalLayer (PHY) Specifications IEEE P80211-REVmbD12 Novem-ber 2011 (Revision of IEEE Std 80211-2007 as Amended byIEEEs 80211k 2008 80211r-2008 80211y- 2008 80211w-200980211n-2009 80211p-2010 80211z-2010 80211v-2011 80211u-2011 and 80211s-2011) 2011
[3] H Abdulhamid K E Tepe and E Abdel-Raheem ldquoPerfor-mance of DSRC systems using conventional channel estimationat high velocitiesrdquo AEUmdashInternational Journal of Electronicsand Communications vol 61 no 8 pp 556ndash561 2007
[4] M Wellens B Westphal and P Mahonen ldquoPerformance eval-uation of IEEE 80211-based WLANs in vehicular scenariosrdquo inProceedings of the IEEE 65th Vehicular Technology ConferencemdashVTC2007-Spring pp 1167ndash1171 Dublin Ireland April 2007
[5] N Benvenuto and G Cherubini ldquoOrthogonal frequency divi-sion multiplexingrdquo in Algorithms for Communications Systemsand Their Applications chapter 9 John Wiley amp Sons Chich-ester UK 2002
[6] J Karedal F Tufvesson N Czink et al ldquoA geometry-basedstochastic MIMO model for vehicle-to-vehicle communica-tionsrdquo IEEE Transactions on Wireless Communications vol 8no 7 pp 3646ndash3657 2009
[7] G Acosta-Marum and M A Ingram ldquoSix time- and fre-quencymdashelective empirical channel models for vehicular wire-less LANsrdquo IEEE Vehicular Technology Magazine vol 2 no 4pp 4ndash11 2007
[8] httpsourceforgenetprojectsphyslayersim[9] httpitppsourceforgenet[10] S I Kim H S Oh and H-K Choi ldquoMid-amble aided OFDM
performance analysis in high mobility vehicular channelrdquo inProceedings of the IEEE Intelligent Vehicles Symposium pp 751ndash754 IEEE June 2008
[11] Y Zhang I L Tan C Chun K Laberteaux and A Bahai ldquoAdifferential OFDM approach to coherence time mitigation in
10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Vehicular Technology
DSRCrdquo in Proceedings of the 5th ACM International Workshopon VehiculAr Inter-NETworking (VANET rsquo08) pp 1ndash6 ACMSeptember 2008
[12] T Zemen L Bernado N Czink and A F Molisch ldquoIterativetime-variant channel estimation for 80211p using generalizeddiscrete prolate spheroidal sequencesrdquo IEEE Transactions onVehicular Technology vol 61 no 3 pp 1222ndash1233 2012
[13] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol 20 no 2 pp 284ndash287 1974
[14] A Bourdoux H Cappelle and A Dejonghe ldquoChannel track-ing for fast time-varying channels in IEEE80211p systemsrdquoin Proceedings of the Global Telecommunications Conference(GLOBECOM rsquo11) pp 1ndash6 IEEEHouston Tex USADecember2011
[15] J A Fernandez K Borries L Cheng B V K Vijaya KumarD D Stancil and F Bai ldquoPerformance of the 80211p physicallayer in vehicle-to-vehicle environmentsrdquo IEEE Transactions onVehicular Technology vol 61 no 1 pp 3ndash14 2012
[16] Z Zhao X Cheng M Wen B Jiao and C-X Wang ldquoChannelestimation schemes for IEEE 80211p standardrdquo IEEE IntelligentTransportation Systems Magazine vol 5 no 4 pp 38ndash49 2013
[17] C-JWu andD Lin ldquoSparse channel estimation for ofdm trans-mission based on representative subspace fittingrdquo inProceedingsof the IEEE 61st Vehicular Technology Conference (VTC rsquo05) vol1 pp 495ndash499 May 2005
[18] B Yang K B Letaief R S Cheng and Z Cao ldquoChannel esti-mation for OFDM transmission in multipath fading channelsbased on parametric channel modelingrdquo IEEE Transactions onCommunications vol 49 no 3 pp 467ndash479 2001
[19] A F Molisch F Tufvesson J Karedal and C F Meck-lenbrauker ldquoA survey on vehicle-to-vehicle propagation chan-nelsrdquo IEEE Wireless Communications vol 16 no 6 pp 12ndash222009
[20] T Abbas L Bernado A Thiel C Mecklenbrauker and FTufvesson ldquoRadio channel properties for vehicular communi-cation merging lanes versus urban intersectionsrdquo IEEE Vehicu-lar Technology Magazine vol 8 no 4 pp 27ndash34 2013
[21] T Hastie R Tibshirani and J Friedman The Elements ofStatistical Learning Springer Series in Statistics Springer NewYork NY USA 2001
[22] A MolischWireless Communications Wiley-IEEE Press 2005[23] M Siti A Agnoletto and A Assalini ldquoDoppler spread estima-
tion and channel update period tuning in OFDM-based vehic-ular communication systemsrdquo in Proceedings of the IEEE 73rdVehicular Technology Conference (VTC rsquo11) pp 1ndash5 May 2011
[24] G Ren Y Chang and H Zhang ldquoSNR estimation algorithmbased on the preamble for wireless OFDM systems in frequencyselective channelsrdquo IEEE Transactions on Communications vol57 no 8 pp 965ndash974 2008
[25] A Abdi J A Barger and M Kaveh ldquoA parametric model forthe distribution of the angle of arrival and the associated corre-lation function and power spectrum at themobile stationrdquo IEEETransactions onVehicular Technology vol 51 no 3 pp 425ndash4342002
[26] A Doukas and G Kalivas ldquoRician k factor estimation for wire-less communication systemsrdquo in Proceedings of the InternationalConference on Wireless and Mobile Communications (ICWMCrsquo06) p 69 July 2006
[27] G Azemi B Senadji and B Boashash ldquoRiceanK-factor estima-tion in mobile communication systemsrdquo IEEE CommunicationsLetters vol 8 no 10 pp 617ndash619 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of










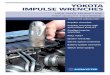






![Preliminary Estimation of Tsunami Hazards … · Web viewpersonal communications]. High-pass filter of Butterworth Infinite Impulse Response (IIR) digital filters [Mathworks, 2015]](https://img.pdfslide.us/doc/110x75/5cd7a3a888c9935d038d7151/preliminary-estimation-of-tsunami-hazards-web-viewpersonal-communications.jpg)











