Embed Size (px)
Citation preview

AGU Fall Meeting Page 1 / 7Presentation G61A-04
CHAMP Scientific Payload and its Contribution to aStable Attitude Control System
Ralf Bock, Hermann Lühr, Ludwig GrunwaldtGeoForschungsZentrum Potsdam, Telegrafenberg, D-14473 Potsdam, Germany
http://op.gfz-potsdam.de/champ
AGU Fall Meeting 2000Poster presentation G61A-04

AGPre
to thruster
0:27:00
00:28:00
2000)
A by attitude a boom oscillations which decayw t radial component is depicted.T bout 10-6 m/s²) exceeds thei 1000. Such periods of thrusterf luded from the science datap tivations has to be kept at am s example are due to a speciala
ntific satellite CHAMP has been launched into a near-at 460 km altitude. Throughout its anticipated 5-year to 300 km. This mission profile has been chosen tod to resolve temporal variations.
d is dedicated to recover the global gravity field, the atmospheric sounding measurements. In addition to
GPS receiver, star cameras and vector magnetometers for the attitude and orbit control system (AOCS).
tional from non-gravitational orbit perturbations anAMP. The non-gravitational perturbations include air
drag, solar radiation pressure and attitude control actuator operation. Therefore anattitude control system is needed that sparsely performs thruster firing butpredominantly uses magnetic torquing instead. The reason for this is that the latterproduce significantly lower angular accelerations and no linear accelerations thusproviding a quiet measurement platform.
While the Fluxgate Magnetometer delivers undisturbed input for magnetic torquing,outages of the GPS receiver and star cameras have occasionally affected the CHAMPAOCS performance.
I orsOptical Bench with
Fluxgate Magnetometersand Star Sensors
PS POD Ante
inside ther of gravity)
Digital Ion Driftmeterand Langmuir Probe Overhauser
Magnetometer
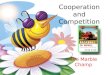
Response of the accelerometer
-1.2e-06
-1.0e-06
-8.0e-07
-6.0e-07
-4.0e-07
-2.0e-07
0.0e+00
2.0e-07
00:22:00
00:23:00
00:24:00
00:25:00
00:26:00
0
Time, UTC (Nov. 10,
Acc
eler
atio
n, m
/s²
ccelerometer measurements are affected nd subsequently triggered magnetometry ithin a few tens of seconds. Here the orbihe maximum amplitude of the spikes (a
nstrument resolution by nearly a factor of irings / boom oscillations have to be excrocessing, thus the number of thruster acinimum. The frequent thruster pulses in thi
ttitude maneuver.
ntroduction G
Accelerometer (spacecraft at cente
U Fall Meetingsentation G61A-04
firings
00:29:00
00:30:00
thruster activation
On July 15, 2000 the geosciepolar, circular low earth orbit mission the altitude will decayprovide full global coverage an
The CHAMP scientific payloamagnetic field and to performthese scientific objectives the are also used as input sensors
In order to separate gravitaaccelerometer is flown on CH
Star Sensnna
Page 2 / 7

AGU Fall M Page 3 / 7Presentatio
Attitude and Orbit Control System
The CHAMP satellite is kept in a three-axis stabilizedearth-oriented attitude with the boom pointing in flightdirection to ensure minimum air drag. The AOCS employsa cold gas propulsion system for attitude and orbit changemaneuvers. A set of three magnetic torquers for pre-compensation of environmental disturbances supports thecold gas system. The payload instruments Star Cameras,GPS Receiver and Fluxgate Magnetometer are used asattitude sensors along with the Coarse Earth and SunSensors for the safe mode.
Attitude and Orbit Control System AOCS
Data Management Unit and Drive Electronics
MagnetorquersAttitude
ThrustersOrbit Thrusters
Fluxgate Magnetometers
Star Cameras (boom & body)
GPS ReceiverCoarse Earth &
Sun Sensors
The accelerometer measures rotational and linearaccelerations in the range of ±10-4 m/s² with a resolutionof ±10-9 m/s². This led to demanding requirements in thespacecraft and AOCS design, e.g. positioning theaccelerometer in the center of gravity, aligning thrusters toachieve force free torques and limit thruster activation to afew per orbit. Thruster firings disturb the accelerometermeasurements thus mainly magnetic torquing is used forattitude control. Missing or false AOCS data input by theinstruments leads to unnecessary thruster pulses.
Example of AOCS control activity
-3
-2
-1
0
1
2
3
Dev
iatio
n A
ng
le, d
eg
Roll
Pitch
Yaw
-400
-300
-200
-100
0
100
200
300
400
To
rqer
Cu
rren
t, m
A
MTx
MTy
MTz
-2000
-1000
0
1000
2000
20:00:00
20:23:15
20:46:30
21:09:45
21:33:00
21:56:15
22:19:30
22:42:45
23:06:00
23:29:15
23:52:30
Time, UTC (Aug. 7, 2000)
Th
rust
er P
uls
es ,
mse
c
THx
Thy
THz
These plots over 2.5 orbits (each scale mark represents a quarter orbit, starting at a northbound equatorpass at 20:00 UTC) show that the attitude is predominantly controlled by magnetic torquing and thatregional patterns of attitude deviation angles and torquer activities exist. For example the roll axis can notbe controlled by torquers over the equator (at 20:00, 20:46, 21:33 UTC etc.). If the deviation angles exceed2° or the estimated rates are above 0.004 deg/sec the thrusters are activated. Unnecessary thruster firingoccur due to false sensor input that lead to wrong rate estimates (e.g. 20:20 UTC).
eetingn G61A-04

AGU Fall Meeting Page 4 / 7Presentation G61A-04
GPS Receiver Effects
GPS outages
Available97.8 %
Not Available2.2 %
39.0 %
46.9 %
14.1 % < 6 min.
6 ... 9 min.
> 9 min.
The unavailability of GPS navigation solutions due to resetsis 2.2% (statistics over 622 hours). This graph shows thedistribution of those data gaps with respect to duration. Theupdated GPS software causes less resets but it requires theacquisition of 5 satellites in lock before the navigationsolution will be forwarded to the AOCS. While the number ofresets per day has decreased the overall time of data gaps isthe same but the distribution has shifted to longer periods.
Reaction of the AOCS to a failed GPS position fix
0
1000
2000
3000
4000
5000
6000
7000
14:16:00
14:18:00
14:20:00
14:22:00
14:24:00
14:26:00
14:28:00
14:30:00
14:32:00
14:34:00
14:36:00
14:38:00
14:40:00
14:42:00
14:44:00
14:46:00
Time, UTC
Th
rust
-tim
e, m
s-15
-12
-9
-6
-3
0
3
6
Att
itud
e D
evia
tion
An
gle
s, d
eg
GPS Current
Attitude Thrusters
Dev. Roll
Dev. Pitch
Dev. Yaw
GPS Reset GPS Reset
After a S/W reset, the GPS receiver performs an „open sky“ search for the navigation signals of theGPS constellation. The old S/W version started to output navigation solutions as soon as 4 satelliteswere in lock, but the quality check was insufficient. In case of a false solution, the AOCS on-boardorbit propagator assumes a sudden change in the orbital position of the spacecraft and tries to steerthe attitude according to this improper data. This causes excessive thruster firings and deviationsfrom the nominal attitude.The GPS receiver clears the erroneous situation by a self-induced reset after a few minutes andproduces good navigation data afterwards. The AOCS corrects for the improper attitude and bringsCHAMP back into nominal orientation within short time. No more GPS-triggered attitude deviationshave occurred since the software update.
Apart from the scientific objectives like precise orbitdetermination and occultation measurements, the GPS TRSR-IIspace receiver forwards its navigation solution to the AOCS.These position and velocity data are required to provide theAOCS with the attitude reference direction (aligned with velocityvector) and are needed to calculate the actual attitude from thestar sensor reading. During the first 3 months in orbit theCHAMP GPS receiver has experienced 4 software resets perday, but when navigation solutions are unavailable the AOCSpropagates the orbit based on latest inputs from GPS. Moreharmful were false navigation solutions that led to wrong attitudedeviations and caused thruster firings. The first shortcoming hasbeen significantly reduced while the latter has been eliminatedby a GPS software update on November 8, 2000.

AGU Fall Meeting Page 5 / 7Presentation G61A-04
Two independent star cam determine the orientation in space of the body-mountedaccelerometer sensor and a head units are flown for the first time in dual-headconfiguration and achieve a star cameras for AOCS purposes required to investigateand adjust its interaction wi
Star Camera Effec
0
50
100
150
200
250
300
350
400
190 195 200
Mag
net
ic A
ctiv
ity, a
p-v
alu
e
CHAMP was launched during anextremely severe magnetic storm onJuly 15, 2000. This has affected theASC CCD chips as depicted in thefirst image of the ASC downloaded toground. It shows the actual stars(green circles) and luminous non-stellar objects (red circles). Protonspassing through the camera chipcause the many non-stellar objects.Nominally only a few proton impactsare expected, but due to the extremegeomagnetic storm the number isvastly increased. On this image 143luminous objects were detected ofwhich 71 are stars. Decreasing thesensitivity and installing a hotspotrejector has cured this problem.
Solar proon the
era systems are flown on CHAMP. Each operates two camera heads. They serve to the Fluxgate magnetometry assembly on the boom. These non-magnetic camern attitude resolution in the arcsecond range. The novelty of also using these dual-headth the AOCS in flight.
ts
205 210 215 220 225 230 235 240
Day of Year 2000
CHAMP Launch15.07.2000 (DOY 197)
tons causing false stars star camera images

AGU Fall Meeting Page 6 / 7Presentation G61A-04
Tracks of the stars cameras on the sky
-90
-60
-30
0
30
60
90
0 60 120 180 240 300 360
Right Ascension , deg
Dec
linat
ion
, d
eg
Aug. 24 2000 , DOY 237
Sun
MoonLine of Sight
Star Camera Head 1
Line of SightStar Camera Head 2
Attitude data are not availablewhen the sun or the moon are inthe field of view. The line of sight inthe celestial reference frame of twocamera heads over several orbits isdepicted. The AOCS uses only oneof the 4 camera heads which ischosen according to its availabilityin a fixed order. The switch fromone camera head to another,especially from body- to boom-mounted heads may cause thrusteractivation in case the transfor-mation angles into the commonreference system are not properlyadjusted. Especially gracingincident sun light causes thefrequent switching between cameraheads. Software updates and angleadjustments have significantlyreduced this effect.

AGU Fall Meeting Page 7 / 7Presentation G61A-04
The lessons learned during theCHAMP commissioning phasehave led to improvements onthe interaction between thescientific payload instrumentsand AOCS. The cold gasconsumption has beenconsiderably lowered by variousadjustments and has reachedthe nominal value of 4g/dayaverage. Because the cold gasis the life limiting resource athorough analysis and goodunderstanding of the behavior isthe key to reach the planned 5years in-orbit time.
Further software updates andfunctional parameter adjust-ments are planned and give aprospect on a enhanced robust-ness of the attitude and controlsystem on CHAMP.
Conclusion
0
5
10
15
20
25
30
35
40
45
50
Gas
Co
nsu
mp
tio
n,
gra
ms/
day
202 207 212 217 222 227 232 237 242 247 252 257 262 267 272
Day of Year 2000
Safe Mode due to Improper ASC Operation After Corrupt Navdata
Star Camera Software Update and Parameter Adjustment
Reduced ASC Performance due to Gracing Incidents at 12°° Orbit
Safe Mode Test
ASC Software Update Completed, Hotspot Rejector Included
Nominal Gas C ion
Boom Slew Maneuvers
0
100
200
300
400
500
600
700
197
199
201
203
205
207
209
211
213
215
Improper Safe Mode due to CESS Sensor Head Degradation
AOCS and ASC Parameter Adjustments
Early Orbit Phase