Embed Size (px)
Citation preview

1
MS5019 – FEM 1
MS5019 – FEM 2
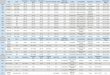
5.1. In-plane Problem and Plane ElementThe previous chapters have discussed 1-D elements (line elements) in the form of bar, truss, beam, and frame elements.One order higher than one-dimensional elements are plane elements, or 2-D elements. The simplest two-dimensional element is the membrane element, which can transfer only in-plane loads; there are no out-of-plane loads. Consequently, membrane elements can carry only in-plane stress but cannot transfer bending moments or torsion. Figure 5-1 shows structures which can be modelled by membrane elements.The simplest of membrane elements is so-called constant strain triangle (CST). The assumption for this element is that the element displacement field is linear, which thus yields constant strains within the element. This chapter will discuss the derivation of the CST element equations using POMPE.

2
MS5019 – FEM 3
Figure 5-1 Structures which can be modelled by membrane elements
(b) Spanner under line-pressure load
(a) Plate with hole under in-plane axial load
MS5019 – FEM 4
5.2. Plane Stress and Plane StrainPlane problem can be categorized either as plane stress or plane strain. Consider the in-plane loaded plate shown in Figure 5-2.
x
z y
Figure 5-2 A plate under in-plane loading
The plane stress condition dictates that the stress component in the z-direction is equal to zero. This situation occurs if the thickness of the plate (in z-direction) is very small.The plane strain condition prevails if the strain in z-direction is very small (zero). Thick structures are normally treated as plane strain problems.

3
MS5019 – FEM 5
{ }
)4.2.5(][}{
)3.2.5(}]{[}{
)2.2.5(}]{[}{
)1.2.5()(
Txyyx
xv
yu
yvxu
xy
y
x
D
yvxu
dB
τσσσ
εσ
ε
γεε
ε
=
=
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
∂∂
∂∂
∂∂∂∂
as written becan components stress thewhere
bygiven is iprelationshstrain -stress Thedirection.- in thent displaceme
theis anddirection - in thent displaceme theis where
or
bygiven is plate for the iprelationshplacement strain/dis The
MS5019 – FEM 6
)7.2.5(}]{][[}{
obtain we(5.2.3), Eq. into (5.2.2) Eq. ngsubstitutiby case,any In
)6.2.5(00
0101
)21)(1(][
:problems For
)5.2.5(00
0101
1][
:problems For strain. planeor stress
plane as dcategorize is problem theon whether depends ][ of valueThe
221
21
2
dBD
ED
ED
D
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−
−+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
−
−
σ
νννν
νν
νν
ν
ν
ν
strain plane
stress plane

4
MS5019 – FEM 7
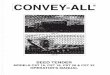
Figure 5-3 Basic triangular element
5.3. Derivation of CST Element Stiffness MatrixStep 1 Select Element TypeConsider the basic triangular element shown in Figure 5-3, with nodes i, j, and m labeled in a CCW manner. Here, all information are based on this CCW system of labelling. It is important that a consistent labelling system for the whole body is used to avoid problems in the calculations such as negative element areas.
),( ii yxi
),( mm yxm
),( jj yxj
Here (xi, yi), (xj, yj), and (xm, ym) are the known nodal coordinates of nodes i, j, and m respectively. The nodal displacement of nodes i, j, and m are (ui, vi),(uj, vj), and (um, vm) respectively.
iuju
mu
jviv
mv
MS5019 – FEM 8
)1.3.5(}{}{}{
}{
bygiven ismatrix nt displaceme nodal The
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
m
m
j
j
i
i
m
j
i
vuvuvu
ddd
d
Step 2 Select Displacement FunctionsWe select a linear displacement function for each element as.
)2.3.5(),(),(
654
321
yaxaayxvyaxaayxu
++=++=
The linear function ensures that compatibility will be satisfied.

5
MS5019 – FEM 9
)3.3.5(1000
000133
}{
as expressed becan , and functions thestoreswhich ,}{function nt displaceme general The
6
5
4
3
2
1
321
321
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
++++
=Ψ
Ψ
aaaaaa
yxyx
yxaayxaa
vu
MS5019 – FEM 10
)5.3.5(111
as formmatrix in expressed (5.3.4) Eqs. of efirst thre the withbeginning s'for solvecan Weetc. ),,(),,( where
)4.3.5(
yield to(5.3.2) Eq. into dsubstituteare scoordinate nodal thefirstly, (5.3.2), Eq.in toof valuesobtain the To
3
2
1
654
654
654
321
321
321
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
==++=++=++=++=++=++=
aaa
yxyxyx
uuu
ayxuuyxuuyaxaavyaxaavyaxaavyaxaauyaxaauyaxaau
mm
jj
ii
m
j
i
iiiiii
mmm
mjj
iii
mmm
jjj
iii

6
MS5019 – FEM 11
becomes formexpansion on which ],[ oft determinan theis
)8.3.5(111
2
where
)7.3.5(21][
as found becan ][ of inverse themethod,cofactor Using(5.3.5). Eq. of sideright on thematrix 33 theis ][ where
)6.3.5(}{][}{obatin wes,a'for solvingor
1
1
xyxyxyx
A
Ax
xx
uxa
mm
jj
ii
mji
mji
mji
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
×=
−
−
γγγβββααα
MS5019 – FEM 12
obtaincan we(5.3.6), Eqs. of last three theusing Similarly,
)11.3.5(21
as formmatrix in expressed becan (5.3.6) Eq. known, ][With
)10.3.5(
and triangle, theof area theis Here
)9.3.5()()()(2
3
2
1
1-
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=−=−=−=−=−=
−=−=−=
−+−+−=
m
j
i
mji
mji
mji
ijmmijjmi
jimimjmji
jijimimimjmjmji
jimimjmji
uuu
Aaaa
x
xxxxxxyyyyyy
xyyxxyyxxyyx
A
yyxyyxyyxA
γγγβββααα
γγγβββααα

7
MS5019 – FEM 13
obtain we(5.3.13), Eq. into (5.3.11) Eq. ngSubstituti
)13.3.5(]1[}{
have weform,matrix in expressed(5.3.2) Eq. begin with We. and,, ntsdisplaceme nodalunknown
theand ,,,, variablescoordinateknown the, and variablescoordinate theof in term manner) analogousan in derived becan ( }{ of
),( function,nt displaceme general thederive ready to are weNow
)12.3.5(21
3
2
1
i
i
6
5
4
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
Ψ
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
aaa
yxu
uuyx
vyxux
vvv
Aaaa
mj
mj
m
j
i
mji
mji
mji
γγαα
γγγβββααα
L
MS5019 – FEM 14
)14.3.5()(
)()(21)},({
as obtained becan ),(function nt displaceme theSimilarly,
)13.3.5()(
)()(21)},({
as written becan grearrangin andtion multiplicaafter which
)12.3.5(]1[21}{
⎭⎬⎫
⎩⎨⎧
+++
+++++=
⎭⎬⎫
⎩⎨⎧
+++
+++++=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
mmmm
jjjjiiii
mmmm
jjjjiiii
m
j
i
mji
mji
mji
vyxvyxvyx
Ayxv
yxv
uyxuyxuyx
Ayxu
uuu
yxA
u
γβαγβαγβα
γβαγβαγβα
γγγβββααα

8
MS5019 – FEM 15
)17.3.5(),(),(
}{
)16.3.5(),(),(
)15.3.5(
)(21
)(21
)(21
⎭⎬⎫
⎩⎨⎧
++++
=⎭⎬⎫
⎩⎨⎧
=Ψ
++=++=
++=
++=
++=
mmjjii
mmjjii
mmjjii
mmjjii
mmmm
jjjj
iiii
vNvNvNuNuNuN
yxvyxu
vNvNvNyxvuNuNuNyxu
yxA
N
yxA
N
yxA
N
vu
obtain weform,matrix in (5.3.16) Eqs. Expressing
as (5.3.14) and (5.3.13) Eqs. rewritecan we(5.3.15), Eqs. using Thus,
define weform,simpler in andfor (5.3.14) and (5.3.13) Eq. express To
γβα
γβα
γβα
MS5019 – FEM 16
)20.3.5(000
000][
bygiven is ][ where
)19.3.5(}]{[}{
have weform,matrix dabbreviatein (5.3.18) Eq. expressing Finally,
)18.3.5(000
000}{
or
⎥⎦
⎤⎢⎣
⎡=
=Ψ
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡=Ψ
mji
mji
m
m
j
j
i
i
mji
mji
NNNNNN
N
N
dN
vuvuvu
NNNNNN

9
MS5019 – FEM 17
Matrix [N] is the shape function matrix of the CST. This is the same in concept as the shape matrix of the previous 1-D elements. Eq. (5.3.19) express the general displacements as functions of {d} in terms of the shape functions Ni, Nj, and Nm. As the shape functions are linear, the displacement field, within the element, is also linear. A linear displacement field yields a constant strain field in the element.For instance, Ni represents the shape of the variable u when plotted over the surface of the element for ui = 1 and all other d.o.f. Equal to zero, that is, uj = um = vi = vj = vm = 0. In addition, u(xi,yi) must equal to ui. Therefore, we must have Ni = 1, Nj = 0, and Nm = 0 at (xi,yi). Similarly, u(xj,yj) = uj. Therefore, Ni = 0, Nj = 1, and Nm = 0 at (xj,yj).Finally, Ni + Nj + Nm = 1 for all x and y locations on the surface of the element. The proof of this relationship follows that given for the bar element in Section 3.2.
MS5019 – FEM 18
Step 3 Define the Strain/Displacement & Stress/Strain RelationshipsWe express the element strains and stresses in terms of the unknown nodal displacements.
( )
)23.3.5(, or
)22.3.5(,
have wents,displaceme for the (5.3.16) Eqs. Using
)21.3.5()(
}{
bygiven areelement 2D with theassociatedstrain The
,,, mxmjxjixix
mmjjiix
yv
xu
yvxu
xy
y
x
uNuNuNu
uNuNuNx
uxu
++=
++∂∂
==∂∂
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
∂∂
∂∂
∂∂∂∂
γεε
ε
StrainsElement

10
MS5019 – FEM 19
( )
( ) )26.3.5(21
have we(5.3.23), Eq.in (5.3.25) and (5.3.24) Eqs. using Therefore,
)25.3.5(2
and 2
similarly, and,
)24.3.5(22
1expressed becan (5.3.23) Eq.
in functions shape theof sderivative the(5.3.15), Eq. Using.0 and 0 similarly, alue;constant v a is ),( cause-be 0 used have We . e.g. able, that varirespect to
ation withdifferentiindicatesvariableaby followed coma thewhere
,,
,
,,
,,
mmjjii
mxm
jxj
iiiixi
xmxjiii
xiixi
uuuAx
u
AN
AN
Ayx
AN
uuyxuuuxNN
βββ
ββ
βγβα
++=∂∂
==
=++=
====∂∂=
MS5019 – FEM 20
( )
( )
)28.3.5(000000
2A1}{
yields (5.3.21) Eq.in (5.3.27) and (5.3.26) Eq. ngSubstituti
)27.3.5(
21
21
obtain weSimilarly,
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
+++++=∂∂
+∂∂
++=∂∂
m
m
j
j
i
i
mmjjii
mji
mji
mmjjiimmjjii
mmjjii
vuvuvu
vvvuuuAy
vxu
vvvAy
v
βγβγβγγγγ
βββε
βββγγγ
γγγ

11
MS5019 – FEM 21
[ ]
(CST). anglestrain triconstant a callediselement thehence, constant; be will(5.3.31) Eq.in strains The
)32.3.5(][ ][ where)31.3.5(}]{[}{
as written becan (5.3.29) Eq. form, simplifiedIn
)30.3.5(][][][
where
)29.3.5(}{}{}{
}{ or
00
2
10
0
2
10
0
2
1
mji
mm
m
m
m
jj
j
j
j
ii
i
i
i
m
j
i
mji
BBBBdB
BBB
ddd
BBB
AAA
==
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
ε
ε
βγγ
β
βγγ
β
βγγ
β
MS5019 – FEM 22
)34.3.5(}]{][[}{
)33.3.5(][
dBD
D
D
xy
y
x
xy
y
x
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
σ
γεε
τσσ
written becan iprelationshain stress/str the(5.3.33), Eq.in (5.3.31) Eq. ngSubstituti problems.strain planefor 6) (5.2. Eq.by
and problems stress planefor 5) (5.2. Eq.by given is ][ where
bygiven is iprelationshain stress/str plane-in thegeneral,In ipRelationsh ainsStress/Str

12
MS5019 – FEM 23
Step 4 Derive the Element Stiffness Matrix and Equations
Using the POMPE, we can generate the equations for a typical CSTelement. The total PE of the element is a function of the nodal displacements ui, vi, uj, ..., vm such that
)38.3.5(}}{{}{21
have we), (5.3.33 Eq. usingor
)37.3.5(}{}{21
bygiven isenergy strain thewhere)36.3.5(
bygiven is PE totalThe)35.3.5(),,,(
∫∫∫
∫∫∫
=
=
Ω+Ω+Ω+=
=
V
V
dVDU
dVU
U
vuvu
T
T
spbp
mjiipp
εε
σε
π
ππ L
MS5019 – FEM 24
act. }{ tractions theover which surface therepresents and )lb/inor N/min (typically tractionssurface therepresents }{ where
)41.3.5(}{}{bygiven is ) tractionssurface(or loads ddistribute theof PE The
loads. nodal edconcentrat the}{ and ntsdisplaceme nodal therepresents }{ where)40.3.5(}{}{
bygiven is loads edconcentrat theof PE The
).lb/inor N/min (typicallydensity or weight t volumeweight/unibody theis }{ and function,nt displaceme general again the is }{ where
)39.3.5(}{}{bygiven isforcesbody theof PE The
22
33
TST
dST
PdPd
X
dVX
S
Tp
Tp
Tb
V
∫∫
∫∫∫
Ψ−=Ω
−=Ω
Ψ
Ψ−=Ω

13
MS5019 – FEM 25
[ ]
is that element;an on }{ system load totaltherepresent (5.3.43) Eq. of termslast three that theseecan we(5.3.41), - (5.3.39) Eqs. From
)43.3.5(}{][}{}{}{
}{][}{}{]][[][}{
Therefore, (5.3.42). Eqs. of integral theofout taken becan }{ so s,coordinate general oft independen are }{nt displaceme nodal The
)42.3.5(}{][}{}{}{
}{][}{}]{][[][}{have we(5.3.41), Eq.
- (5.3.38) Eq.in strain for the (5.3.31) Eq. and }{for (5.3.19) Eq. g Usin
21
21
f
dSTNdPd
dVXNdddVBDBd
dx-yd
dSTNdPd
dVXNddVdBDBd
S
TTT
TTTTp
S
TTT
TTTTp
VV
VV
⎥⎦
⎤⎢⎣
⎡−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
−−
−=
Ψ
∫∫
∫∫∫∫∫∫
∫∫
∫∫∫∫∫∫
π
π
MS5019 – FEM 26
)46.3.5(0}{}{]][[][}{
obtain we4), and3 Chaptersin elements beam andbar for the done wasas ),( since
ntsdisplaceme nodal therespect to with of derivative partial theTaking
)45.3.5(}{}{}{]][[][}{21
obtain we(5.3.43), Eq.in (5.3.44) Eq. Usingly.respectivetractions,surface theand forces, nodal edconcentrat theforces,body epresent th
-re (5.3.44) Eq. of sideright on the terms thirdand second, first, thewhere
)44.3.5(}{][}{}{][}{
p
pp
p
p
=−⎥⎥⎦
⎤
⎢⎢⎣
⎡=
∂
∂
=
−⎥⎥⎦
⎤
⎢⎢⎣
⎡=
++=
∫∫∫
∫∫∫
∫∫∫∫∫
fddVBDBd
fdddVBDBd
dSTNPdVXNf
V
V
V
T
TTT
S
TT
π
πππ
π
d

14
MS5019 – FEM 27
(5.3.6).or (5.3.5) Eq.bygiven is ][ and (5.3.32), Eq.by given is ][ (5.3.9), Eq.by given is where
)50.3.5(]][[][][ yield tointegral theof
outcan taken it element, CSTfor y and x offunction anot is integrand theAs
)49.3.5(]][[][][ becomes (5.3.48) Eq. , hicknessconstant t ofelement an For
)48.3.5(]][[][][ seen thatbeen can it (5.3.47) Eq. from },{}]{[ that Knowing
)47.3.5(}{}{]][[][
have we(5.3.46), Eq. Rewriting
DBABDBAtk
dydxBDBtkt
dVBDBkfdk
fddVBDB
T
A
T
T
T
V
V
=
=
=
=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡
∫∫
∫∫∫
∫∫∫
MS5019 – FEM 28
)51.3.5(
bygiven isequation element The
them).offunction a is ][ (as and properties mechanical theof ands)coordinate nodal of in terms defined are ][ and (because scoordinate nodal
theoffunction aisandmatrix 66ais][element, CST ofmatrix stiffness The
3
3
2
2
1
1
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
3
3
2
2
1
1
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
×
vuvuvu
kkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkk
ffffff
DEBA
k
y
x
y
x
y
x
ν

15
MS5019 – FEM 29
Step 5 Assembling of Element Stiffness Matrix and Introduce BC
We obtain the global structure stiffness matrix and equations by using the direct stiffness method as
(5.3.44). Eq. usingly consistentby or loads) nodal edconcentrat(including nodesproper at the loads ddistribute and forcesbody
lumpingby obtained forces nodal global equivalent of vector theis
)54.3.5(}{}{
and system, scoordinate global theof termsin defined are matrices stiffnesselement all (5.3.52), Eq.in where,
)53.3.5(}]{[}{and
)52.3.5(][][
1
)(
1
)(
∑
∑
=
=
=
=
=
N
e
e
N
e
e
fF
x-y
dKF
kK
MS5019 – FEM 30
In the formulation of the element stiffness matrix Eq. (5.3.50), the matrix has been derived for a general orientation in global coordinates. All element matrices are expressed in the global-coordinates orientation. Therefore, no transformation from local to global equations is necessary.
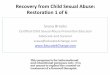
If the local axes for the triangular element are not parallel to the global axes, we must apply matrix transformation similar to those introduced in Chapter 3. We illustrate the transformation of axes for the triangular element shown in Figure 5-4. Local nodal forces are shown in the figure.
The transformation from local to global equations follows the procedure outlined in Section 3.4. We have the same general expressions, Eqs. (3.4.14), (3.4.16), and (3.4.22), to relate local to global displacements, forces, stiffness matrices, respectively; that is.
)55.3.5(ˆˆˆ TkTkTffTdd T===bemust (5.3.55) Eqs.in used matrix ation transformfor the (3.4.15) Eq. where T

16
MS5019 – FEM 31
Figure 5-4 Triangular element with local axes not parallel to the global axes
y
xi
m
j
myf
xyθ
mxf
jxf
jyf
ixfiyf
4.-5 Figurein shown is and,sin,cos where
)51.3.5(
toexpanded is (3.4.15) Thuselement. CST in thepresent are d.o.f. additional twobecause expanded
00000000
0000000000000000
θθθ ==
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
−
−
−
SCCSSC
CSSC
CSSC
T
MS5019 – FEM 32
Step 6 Solve for the Nodal Displacements
We determine the unknown global structure nodal displacement by solving the system of algebric equations given by Eq. (5.3.53).
Step 7 Solve for the Elements Forces (Stresses)
Having solved for the nodal displacements, we obtain the strains and stresses in the global x and y directions in the elements by using Eqs. (5.3.31) and (5.3.34). Finally, we determine the maximum and minimum in-plane principal stresses σ1 and σ2 by using Mohr circle formula, where these stresses are usually assumed to act at the centroid of the element.
EXAMPLE 7.1 and 7.2

17
MS5019 – FEM 33
Reference:1. Logan, D.L., 1992, A First Course in the Finite Element Method,
PWS-KENT Publishing Co., Boston.
2. Imbert, J.F.,1984, Analyse des Structures par Elements Finis, 2nd Ed., Cepadues.
3. Zienkiewics, O.C., 1977, The Finite Eelement Method, 3rd ed., McGraw-Hill, London.
4. Finlayson, B.A., 1972, The Method of Weighted Residuals and Variational Principles, Academic Press, New York.