-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
PowerPoint® Lectures forUniversity Physics, Twelfth Edition
– Hugh D. Young and Roger A. Freedman
Lectures by James Pazun
Chapter 13
Periodic Motion
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Goals for Chapter 13
• To outline periodic motion
• To quantify simple harmonic motion
• To explore the energy in simple harmonic motion
• To consider angular simple harmonic motion
• To study the simple pendulum
• To examine the physical pendulum
• To explore damped oscillations
• To consider driven oscillations and resonance
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Homework
Read 476 to 486
�3, 5, 9, 15
Read 486 to 494
�25, 27
Read 495 to 505 (Skip Molecular Vibration)
�31, 35, 45, 49, 51, 61, 69
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Introduction
• If you look to the right, you’ll see a time-lapse photograph
of a simple pendulum. It’s far from simple, but it is a great
example of the regular oscillatory motion we’re about to study.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Describing oscillations
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Describing oscillations
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Describing oscillations
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
In Oscillations . . . Displacement: the distance the body is
from its equilibrium position.Restoring Force: the force that tends
to restore the body to its equilibrium position.Amplitude : the
maximum displacement from equilibriumPeriod: (T) the time for one
cycle.Frequency: ( ) the number of cycles per unit of time.Angular
Frequency: (ω) 2π times the frequency.
(13.1)
(13.2)
f
Tfππω 22 ==
Tf1= fT 1=
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
13.1 SummaryPERIODIC MOTION: PERIODIC MOTION IS MOTION THAT
REPEATS
ITSELF IN A DEFINITE CYCLE. IT OCCURS WHENEVER A BODY HAS A
STABLE EQUILIBRIUM POSITION AND A RESTORING FORCE THAT ACTS
WHEN IT IS DISPLACED FROM EQUILIBRIUM. PERIOD T IS THE TIME
FOR
ONE CYCLE. FREQUENCY IS THE NUMBER OF CYCLES PER UNIT TIME.
ANGULAR FREQUENCY IS TIMES THE FREQUENCY.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Period, Frequency, and Angular FrequencyAn ultrasonic transducer
(loudspeaker) used for medical diagnosis oscillates at a frequency
of 6.7 MHz = 6.7 x 106 Hz. How much time does each oscillation
take, and what is the angular frequency?
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Simple harmonic motion
• An ideal spring responds to stretch and compression linearly,
obeying Hooke’s Law.
• For a real spring,Hookes’ Law is a goodapproximation.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Definition of Simple Harmonic Motion
The easiest way to view SHM is with a mass on a spring. It obeys
Hooke’s Law: Fx = -kx (13.3)
When the restoring force is directly proportional to the
displacement from equilibrium, as given by Eq. (13.3), the
oscillation is called simple harmonic motion abbreviated SHM.
The acceleration ax = d2x/dt2 = Fx/m of a body in SHM is given
by:
(13.4)xm
k
dt
xdax −== 2
2
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Simple harmonic motion viewed as a projectionIf you illuminate
uniform circular motion (say by shining a flashlight on a ball
placed on a rotating lazy-Susan spice rack), the shadow projection
that will be cast will be undergoing simple harmonic motion, like
in figures 13.4 below.The SHM and circular motion analogy should
hold true if the amplitude, A, equals the disk radius and the
angular frequency equals the disk’s angular velocity.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Comparing acceleration of shadow at P to SHMThe circle the ball
moves in so that its shadow matches SHM is called the circle of
reference as we call Q the reference point.At a certain time, t,
the vector OQ makes an angle,θ, with the horizontal. As the point Q
moves around the reference circle with a constant angular speed ω,
the vector rotates with the same speed, called a phasor.
The x-component of the phasor at time t is just the x-coordinate
of the point Q:x = A cos θ
This position also refers to the position of the shadow at P,
which is the projection of Q onto the x-axis. The acceleration of P
is just the x-component of the acceleration of Q.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Comparing acceleration of shadow at P to SHMFrom centripetal
acceleration, the acceleration of Q is aQ = ω2A, directed toward O,
as shown below.The x-component is just ax = -aQ cos θCombining
these two equations gives ax = - ω2A cos θFrom before x = A cos θ,
so ax = - ω2x
This gives exactly what is to be expected from equation 13.4, if
the angular speed of the reference point Q is related to the force
constant k and mass m of the oscillating body by
or
m
k=2ωm
k=ω
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Equations on 481
Both omegas, one for angular velocity and one for angular
frequency are the same thing.
k
m
fT
m
kf
mk
πωπ
ππω
ω
221
2
1
2
===
==
=
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Angular frequency, frequency, and period in SHMA spring is
mounted horizontally, with its left end held stationary. By
attaching a spring balance to the free end and pulling toward the
right, we determine that the stretching forceis proportional to the
displacement and that a force of 6.0 N causes a displacement of
0.030 m. We remove the spring balance and attach a 0.50 kg body to
the end, pull it a distance of 0.020 m, release it, and watch it
oscillate. Find the:
Force constant of the spring.
Angular frequency.
Frequency.
Period of the oscillation.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
X versus t for SHO
If at time t = 0 the phasor OQ makes an angle Φ with the x-axis
then at any later time t the angle is (ωt + Φ). The position of the
oscillating object can be found by the equation:
(13.13))cos( φω += tAx
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Variations on a theme—write equations on board
Changing either k or m changes the period of oscillation.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
SHM phase and motion• SHM can occur with
various phase angles, the angle at which t = 0.
• For a given phase we can examine position, velocity, and
acceleration.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
SHM equations
)cos(
)sin(
)cos(
2 φωωφωω
φω
+−=
+−=+=
tAa
tAv
tAx
x
x
Do these equations fit with equation 13.4:
xm
k
dt
xdax −== 2
2
When t = 0:
2
22
2 cos
sin
cos
ω
φω
φωφ
x
x
x
oo
o
o
o
vxA
Aa
Av
Ax
+=
−=
−==
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Watch variables change for a glider example Keep problems
solving strategy on 485 in mind when solving the following
problem.Let’s return to the system of mass and horizontal spring we
considered previously, with k = 200 N/m and m = 0.50 kg. This time
we give the body an initial displacement of +0.015 m and an initial
velocity of +0.40 m/s.
a) Find the period, amplitude, and phase angle of the motions.b)
Write equations for the displacement, velocity, and
accelerations as functions of time.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
13.2 SummarySimple harmonic motion: If the restoring force in
periodic motion is directly proportional to the displacement x, the
motion is called simple harmonic motion (SHM). In many cases this
condition is satisfied if the displacement from equilibrium is
small.
The angular frequency, frequency, and period in SHM do not
depend on the amplitude, but only on the mass m and force constant
k.
The displacement, velocity, and acceleration in SHM are
sinusoidal functions of time; the amplitude A and phase angle of
the oscillation are determined by the initial position and velocity
of the body. (See Examples 13.2, 13.3, 13.6, and 13.7.)
Homework: Read pages 486 to 492
On page 507: 3, 5, 9, 15
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
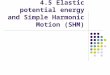
Energy in SHM
• Energy is conserved during SHM and the forms (potential and
kinetic) interconvert as the position of the object in motion
changes.
(13.21)
• Page 487 goes through a proof of this relationship.
• We can rewrite equation 13.21 for a velocity at any
displacement:
(13.22)
• Using this equation we can find the maximum velocity (when
displacement is zero):
(13.23)
2 2 21 1 12 2 2E= xmv kx kA+ =
2 2xv
kA x
m= ± −
2maxv
k kA A A
m mω= = =
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Energy in SHM
• You can use equation 13.22 to calculate the velocity at each
point in the figure below.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Energy in SHM II• Figure 13.13 shows the interconversion of
kinetic and potential energy
with an energy versus position graphic.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Energy in SHM II• Refer to Problem-Solving Strategy on
page 488 while solving the following problem.
• In the oscillation described in the previous example, k = 200
N/m, m = 0.50 kg, and the oscillating mass is released from rest at
x = 0.020 m.
a) Find the maximum and minimum velocities attained by the
oscillating body.
b) Compute the maximum acceleration.c) Determine the velocity
and acceleration
when the body has moved halfway to the center from its original
position.
d) Find the total energy, potential energy, and kinetic energy
at this position.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Energy and momentum are related in SHMA block with mass M
attached to a horizontal spring with force constant k is moving
with simple harmonic motion having amplitude A1. At the instant
when the block passes through its equilibrium position, a lump of
putty with mass m is dropped vertically onto the block from a very
small height and sticks to it.Find the new amplitude and
period.Find the amplitude and period of the putty is dropped onto
the block at its maximum displacement A1.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
13.3 SummaryEnergy in simple harmonic motion: Energy is
conserved in SHM. The total energy can be expressed in terms of the
force constant k and amplitude A. (See Examples 13.4 and 13.5.)
Homework: Read pages 495 to 505 (Skip molecular vibration)
On page 508: 25 and 27
2 2 21 1 12 2 2E= xmv kx kA+ =
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Applications of SHMWhen we have a mass hanging from a spring, or
a mass compressing a spring, the new equilibrium position is when
the spring’s restoring force balances out the force of gravity on
the mass: k∆l = mg
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Vertical SHM
We can set x = 0 at this new equilibrium position and the
equation for the new net force is:
Fnet = k(∆l – x) + (–mg) = –kx
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Vertical SHM in an old carThe shock absorbers in an old car with
mass 1000 kg are completely worn out. When a 980 N person climbs
slowly into the car to its center of gravity, the car sinks 2.8 cm.
When the car, with the person aboard, hits a bump, the car starts
oscillating up and down in SHM. Model the car and person as a
single body on a single spring, and find the period and frequency
of the oscillation.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Angular SHMWatches keep time based on regular oscillations of a
balance wheel initially set in motion by a spring.
Figure 13.18 illustrates the delicate inner mechanism of a clock
or watch.
The wheel has an moment of inertia I about its axis. A coil
spring exerts a restoring torque τ that is proportional to the
angular displacement θfrom the equilibrium position.
We write τz = -κθ where κ is called the torsion constant.
Using the rotational analog to Newton’s second law:
-κθ = Iα or
This is very similar to our definition of SHM.
2 2z zI Id dtτ α θ= =∑
2
2d
Idtθ κ θ= −
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Angular SHM
Angular simple harmonic motion: In angular SHM, the frequency
and angular frequency are related to the moment of inertia I and
the torsion constant .
Homework on 508: 31 and 37
( )
1
2
cos
I
fI
t
κω
κπ
θ ω φ
=
=
= Θ +
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
The Simple Pendulum A simple pendulum consists of a point mass m
at the end of a massless string of length L.
Its motion is approximately simple harmonic for sufficiently
small amplitude; the angular frequency, frequency, and period then
depend only on g and L, not on the mass or amplitude. (See Figure
13.20.)
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
The Simple Pendulum Equations
1
2 2
2 12
k mg L g
m m L
gf
L
LT
f g
ω
ωπ ππ π
ω
= = =
= =
= = =
The equations on the left are only true for small amplitude
oscillations, as shown in the graph on the right.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
A simple pendulumFind the frequency of a simple pendulum 1.000 m
long at a location where g = 9.800 m/s2.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Physical PendulumsLike a simple pendulum, the physical
pendulum’s angular frequency depends on the distance from the axis
of rotation to the mass.
With the physical pendulum, the mass is spread out. It is not a
point mass. The frequency (and hence period) depends on the
distance between the axis of rotation and the center of gravity, d,
and the moment of inertia of the body, I.
mgd
Iω = 2 IT
mgdπ=
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
The physical pendulum• A physical pendulum is any
real pendulum that uses an extended body in motion. Figure 13.22
illustrates a physical pendulum and you may wish to refer to it as
you consider the next example.
• Suppose the object to the right is a uniform rod with length L
pivoted at one end. Find the period of its motion.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Dinosaurs, long tails, and the physical pendulumAll walking
animals, including humans, have a natural walking pace, a number of
steps per minute that is more comfortable than a faster or slower
pace. Suppose this natural pace is equal to the period of the leg,
viewed as a uniform rod pivoted at the hip joint.
a) How does the natural walking pace depend on the length Lof
the leg, measured from hip to foot?
b) Fossil evidence shows that Tyrannosaurus rex, had a leg
length L = 3.1 m and a stride length of 4 m. Estimate the walking
speed of Tyrannosaurus rex.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Damped oscillations
Consider an oscillating system with a damping force due to
friction: Fx = -bvx where vx = dx/dt and b is constant that
describes the strength of the damping force.
The net force would include this damping force and the
oscillatory restoring force: -kx – bvx
From Newton’s second law: -kx – bvx = max
or
Solving with differential calculus yields:( ) ( )2
2
2
cos
4
b m tx Ae t
k b
m m
ω φ
ω
− ′= +
′ = −
2
2dx d xdt dt
kx b m− − =
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Kinds of Damping
The amplitude with damped oscillations decreases with time.
The angular frequency ω’is zero when
This situation is called critically damped.
( ) ( )22
2
cos
4
b m tx Ae t
k b
m m
ω φ
ω
− ′= +
′ = −2b km=
An oscillation is overdamped when
and underdamped when 2b km<
2b km>
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Damped oscillationsClassify either line as overdamped,
underdamped, or critically damped.
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
When a force Fx = -bvx proportional to velocity is added to a
simple harmonic oscillator, the motion is called a damped
oscillation. If (called underdamping), the system oscillates with a
decaying amplitude and an angular frequency ω’ that is lower than
it would be without damping. If (called critical damping) or
(called overdamping), when the system is displaced it returns to
equilibrium without oscillating.
Damped oscillations II
2b km<
2b km=2b km>
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Forced (driven) oscillations and resonanceA force applied “in
synch”with a motion already in progress will resonate and add
energy to the oscillation.
A singer can shatter a glass with a pure tone in tune with the
natural “ring” of a thin wine glass.
( )max
22 2 2
d d
FA
k m bω ω=
− +
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Forced (driven) oscillations and resonance II
• The Tacoma Narrows Bridge suffered spectacular
structuralfailure after absorbing too much resonant energy (refer
to Figure13.28).
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Homework
On Page 509:
45, 49, 51, 61, 69
-
Copyright © 2008 Pearson Education Inc., publishing as Pearson
Addison-Wesley
Homework
Read 476 to 486
�3, 5, 9, 15
Read 486 to 494
�25, 27
Read 495 to 505 (Skip Molecular Vibration)
�31, 35, 45, 49, 51, 61, 69