Embed Size (px)
Citation preview

CEE 610 / SCAS 660Other systems
• CODAR - Coastal Ocean Dynamics Applications Radar• Gravity measurements (GRACE)• Laser Fluorosensing• Fraunhofer Line Discrimination (high spectral res.)
• Terraherz radiation• Low light level cameras• Side Scan Sonar

CODAR
http://rucool.marine.rutgers.edu/COOL-Data/what-is-codar-and-how-it-works
Coastal Ocean Dynamics Applications Radar
http://www.codaros.com/intro_hf_radar.htm
• Land-based, bistatic, radar
• Uses a broadband, high-frequency (HF) pulse 3-50 MHz (6-100 m)
• A vertically polarized HF signal is broadcast with a wide beamwidth.
• The beam can travel well beyond the line-of-site over the electrically conductive ocean water surface.
• Unaffected by rain or fog.
Radar Systems 2CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018

CODAR Coastal Ocean Dynamics Applications Radar
BASIC SIGNAL• The radar signal scatters efficiently off the waves when the wavelengths
are exactly half the transmitted signal wavelength (3-50m) AND the waves are traveling in a radial path either directly away from or towards the radar.
• The scattered radar waves add coherently (Bragg scattering) resulting in a strong return of energy at a very precise wavelength.
• At the CODAR SeaSonde's frequencies (4-50 MHz), the periods of these Bragg scattering short ocean waves are between 1.5 and 5 seconds. (Such waves are almost always present.)
25 MHz transmission 12m EM wave 6m ocean wave12 MHz transmission 25m EM wave 12.5m ocean wave
5 MHz transmission 60m EM wave 30m ocean wave
4. The wave speed is known from the deep water dispersion relation.Thus, the wavelength, direction and wave speed
of the ocean waves are all known.
Radar Systems 3CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018

CODAR Coastal Ocean Dynamics Applications Radar
DOPPLER SIGNAL1. The returning signal exhibits a Doppler-frequency shift. 2. In the absence of ocean currents, the Doppler frequency
shift would always arrive at a known position in the frequency spectrum based on the wave velocity.
3. The difference between the observed Doppler shift and the shift due to the theoretical speed wave speed is the radial component of the underlying ocean current.
4. The current influencing the Bragg waves falls within the upper meter of the water column (or upper 2.5 meters when transmitting between 4-6 MHz).
5. With 2 radar stations, a surface velocity vector field can be derived.
Radar Systems 4CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018

CODAR Antennas
RESOLUTION:For 4-6 MHz: 3-12 kmFor 12-14 MHz: 2-3 kmFor 24-27 MHz: 1-2 km; (high-res.: 300 m - 1 km)For 40-44 MHz: 300 m - 1 km
RANGE:For 4-6 MHz: 160-220 km (day only) For 12-14 MHz: 50-70 kmFor 24-27 MHz: 30-50 kmFor 40-44 MHz: 10-20 km
Omnidirectional, vertically polarized
transmitterOmnidirectional receiver: 3 dipole antennas, oriented
perpendicular to one another
Radar Systems 6CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018

North Carolina Coastal Ocean Observing System (NCCOOS)
CODAR 7CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018
http://152.2.92.42:9080/VirtualHostBase/http/nccoos.org:80/nccoos/VirtualHostRoot/mapshttp://152.2.92.42:9080/VirtualHostBase/http/nccoos.org:80/nccoos/VirtualHostRoot/platforms/hfradar/

GRACE: Gravity Recovery And Climate Experiment
Radar Systems 8CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018
March 2002 – October 2017
GRACE-Follow on mission (GRACE-FO) October 2018
When the first satellite passes over a region of slightly stronger gravity, a gravity anomaly, it is pulled slightly ahead of the trailing satellite. The following spacecraft accelerates, then decelerates over the same point. By measuring the constantly changing distance between the two satellites and combining that data with precise positioning measurements one may construct a detailed map of Earth's gravity anomalies.

GRACE: Gravity Recovery and Climate Experiment
Radar Systems 9CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018
"gravity anomaly" maps show where models of the Earth's gravity field based on GRACE data differ from a simplified mathematical model that assumes the Earth is perfectly smooth and featureless.
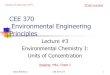
Change in gravity:simulated water storage retrievals from GRACE (blue line) match up with actual hydrological model data (gray line) for an aquifer in northern Kansas, southern Nebraska, and eastern Colorado (area shown in blue on map inset).
-12 0 12centimeters
Equivalent Gravity Anomaly

GRACE: Gravity Recovery and Climate Experiment
Radar Systems 10CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018
https://gracefo.jpl.nasa.gov/resources/33/greenland-ice-loss-2002-2016/

GOCE: Gravity Field and Steady-State Ocean Circulation Explorer (Mar 2009-Nov 2013)
Radar Systems 11CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018
European Space Agency
Three pairs of ultra-sensitive accelerometers arranged to responded to tiny variations in the three-dimensional 'gravitational tug' of the Earth as it travelled along its orbital path. Because of their different position in the gravitational field they all experienced the gravitational acceleration of the Earth slightly differently.
https://en.wikipedia.org/w/index.php?curid=40758547

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 12
Fluoresence
ThermoFisher Scientific

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 13
Laser FluorosensingVegetation fluorescence
http://www.ipgp.fr/~jacquemoud/publications/pedros2008.pdf http://www.eufar.net/document/publi/Meroni_etal_RSE2009_20111219182643.pdf

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 14
Laser FluorosensingVegetation fluorescence: species dependence.
Takahasi K., et al. (1993) Laser induced fluorescence of tree leaves: spectral changes with plant species and seasonsProceedings of IGARSS '93 - IEEE International Geoscience and Remote Sensing Symposium, pp: 1985-1987 Doi: 10.1109/IGARSS.1993.322367

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 15
Laser FluorosensingOrganic matter (in water)
http://www.hutton.ac.uk/research/themes/managing-catchments-and-coasts/national-waters-inventory
Figure 2: Excitation-emission spectra for natural organic matter to be used as a typing rapid screening method for identifying potential of organic matter for interactions with water treatment chemicals and transport of contaminants

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 16
Laser Fluorosensing
http://lms.seos-project.eu/learning_modules/marinepollution/marinepollution-c02-s19-p01.html
Detection and classification of oil spills
Fluorescence spectra of different oil types with excitation at 308 nm. The curves are normalized to the same total fluorescence in order to highlight the shape of the spectra. The absolute fluorescence intensity of heavy oils is much weaker than that of light oils and could not be visualized on the graph without normalization.

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 17
Laser Fluorosensing
http://lms.seos-project.eu/learning_modules/marinepollution/marinepollution-c02-s19-p01.html
Detection and classification of oil spills
• A thin film of lubricating oil on a water surface is illuminated with 355 nm laser radiation and emits blue fluorescence.
• The oil-free water does not fluoresce and remains dark on the image.

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 18
Laser Fluorosensinghttp://lms.seos-project.eu/learning_modules/marinepollution/marinepollution-c02-s19-p01.html
Thickness of oil on water
Fluorescence emission from a pure water sample from the North Sea.
water
Raman scattering of purified (i.e., non-fluorescent) water with the 308 nm fluorescence lidar. The Raman intensity decreases with increasing thickness of an oil film on the water surface. At the same time, fluorescence of the oil increases.

CEE 6100/CSS 6600 Remote Sensing Fundamentals © W. Philpot, Cornell University Fa 2018 Other Systems 19
Laser Fluorosensinghttp://lms.seos-project.eu/learning_modules/marinepollution/marinepollution-c02-s19-p01.htmlThickness of oil on water
Oil thickness map obtained by combining laser fluorosensorand multispectral scanner data.
Individual multispectral scanner images were geometrically and radiometrically corrected and calibrated with respect to oil film thickness by using the laser fluorosensor data.

Fraunhofer Line Descriminator• Makes use of the Fraunhofer lines in the solar spectrum
– Fraunhofer lines are the absorption lines in the solar spectrum– No radiation reaches the earth in these narrow (~0.1 nm) bands– Any radiation sensed in these bands is produced (emitted) by the target
(fluorescence, Raman scattering, etc.)
Observations are made within a Fraunhofer line in a region where fluorescence would be expected from a particular molecule.
Chlorophyll fluorescence (~685 nm, ~730 nm)

Fraunhofer Line DescriminatorJoiner et al. (2011) First observations of global and seasonal terrestrial chlorophyll fluorescence from space. Biogeosciences, 8, 637-651
"Fluorescence estimated from high-spectral resolution data from the Thermal And Near-infrared Sensor for carbon Observation – Fourier Transform Spectrometer (TANSO-FTS) on the Japanese Greenhouse gases Observing SATellite (GOSAT). We use filling-in of the potassium (K) I solar Fraunhofer line near 770 nm to derive chlorophyll fluorescence and related parameters such as the fluorescence yield at that wavelength."
PAR = Photosynthetically Active Radiation is radiation from 400-700nm that is available to plants in photosynthesis.
fPAR = the fraction of PAR that is used by plants.

Fraunhofer Line DescriminatorSatellite instruments: designed to measure atmospheric constituents . e.g., 𝑂𝑂3, 𝑁𝑁𝑂𝑂𝑥𝑥, 𝐶𝐶𝑂𝑂2, 𝐶𝐶𝐶𝐶4, aerosols, formaldehyde, ….GOSAT: Jan 2009 – operational• Fourier Transform Spectrometer (FTS) • Cloud and Aerosol Imager (CAI).
GOSAT FTS GOMESpecies 𝐶𝐶𝑂𝑂2, 𝐶𝐶𝐶𝐶4 𝑂𝑂3, formaldehyde, water vapor, 𝑆𝑆𝑂𝑂2,
𝑁𝑁𝑂𝑂2, aerosols,
Spect. bands 758-775 nm, 1560-1720 nm, 1920-2080 nm, 5560-14300 nm
240-790 nm
Spect. res. 0.27 𝑐𝑐𝑐𝑐 −1 (~0.3 nm @ 1 micron) 0.2-0.4 nm;
Swath ~ 10.5 km 1920 km
Spatial. res. ~10.5 km 800 x 40 lm
Conversion of wavenumber shift to wavelength shift.
GOME-1: Oct 2006 - operationalGOME-2: Sep 2012 - operational

Terahertz radiationTHz spans the range between the thermal and the μ-wave ranges.
• Strongly absorbed by atmospheric moisture.• No strong THz sources
300μ 150μ 100μµ-wave TIR
13,500 ft

Terahertz imaging: security
Spot the knife? Millimeter waves, close to terahertz, show their ability to see through clothes and paper. Science Vol. 297, 2 Aug. 2002.
THz has the potential to spectrally identify explosives through clothing.http://teraview.com/terahertz/id/13

Terahertz imaging: medical applications
Left: human tooth. Centre: Image of the tooth demonstrating THz absorption reveals cavities in red. Right: time of flight THz data shows enamel and dentine, which have different refraction indices. http://www.frascati.enea.it/THz-BRIDGE/descr_gen2.htm
Oesophagus cancer from a horse.left: visible image; middle: THz-image recorded at 16 cm-1
(480 GHz) in the far field; right: image recorded with a solid immersion lens (SIL). The circles mark the metastasis, which can be very clearly identified as dark regionshttp://www.pi1.uni-stuttgart.de/research/Methoden/THzMikroSpektrometer_e.php

Terahertz imaging: construction/inspection
Transmission imaging of water diffusion into concrete through a crack.The strong absorption of THz radiation by water is one of the disadvantages for long-range propagation, however, it is an advantage for highly sensitive detection of water diffusion. The figure shows the sub-THz imaging of cracks in concrete, in which the supplied water diffuses along the cracks and then the diffused water enhances the detection sensitivity of cracks.

Terahertz imaging: industrial inspection
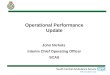
Top surface External pins = 1mm depth
Transistor = 3mm depth Pads on bottom surface = 4mm
3D images of different layers at different depths within an integrated circuit device.
http://www.teraview.com/terahertz/id/37

• Typically operate in the VNIR range
• Typically rated in photometric units• foot-candle: the light intensity from a candle at a distance of one foot.
• lux: A unit of illumination equal to the illumination of a surface all of which is one metrefrom a uniform point source of light of unit intensity (one candela = one lumen per square meter).
Low Light Level Cameras
Daylight Range Foot-candles Lux
SunlightFull DaylightOvercast DayVery Dark DayTwilightDeep Twilight
10,0001,000100101.1
107,52710,752.71,075.3107.5310.751.08
Low Light Level Range
Full MoonQuarter MoonStarlightOvercast Night
.01
.001
.0001
.00001
.108
.0108
.0011
.0001

Standard techniques to increase the light collecting capacity:• large pixels• long integration times• cooled to reduce dark noise
– Liquid nitrogen (~70oK) or liquid helium (~2oK)– Peltier (thermoelectric) cooling
Peltier coolers are so called because they take advantage of the Peltier Effect. The Peltier Effect was discovered in 1834 by a French watchmaker and physicist by the name of Jean Charles Athanase Peltier. The Peltier Effect takes place when an electrical current is sent through two dissimilar materials that have been connected to one another at two junctions. One junction between the two materials is made to become warm while the other becomes cool, in what amounts to an electrically-driven transfer of heat from one side of the device to the other. This transfer can be so dramatic as to bring the cool side below freezing.
Low Light Level Cameras

Techniques to increase the light collecting capacity (cont'd):
•Back illuminated, thinned CCDsThe CCDs are mounted with the back side toward the light. The silicon is reduced in thickness (thinned) to allow incoming photons to easily reach the imaging portion of the CCD. This technique provides very high quantum efficiency over a wide spectral range.
Low Light Level Cameras

Low Light Level Cameras• Image intensifier tubes
• Photons from a low-light source enter the objective lens (on the left) and strike the photocathode (gray plate).
• The photocathode (which is negatively biased) releases electrons which are accelerated to the higher-voltage microchannel plate (red). Each electron causes multiple electrons to be released from the microchannel plate.
• The electrons are drawn to the higher-voltage phosphor screen (green). Electrons that strike the phosphor screen cause the phosphor to produce photons of light amplified many times.

Low Light Level Cameras• Electron-bombarded CCD (EBCCD)
The EBCCD sensor has a transparent glass window through which photons are focused onto a semiconductor photocathode. Photons striking the photocathode generate electrons which are emitted into a vacuum cavity. The electrons are then electrically accelerated into a CCD array that outputs a high resolution, low noise video signal. Gain is achieved through the electron bombarded semiconductor in silicon.

Low Light Level Cameras• Examples of Low light-level cameras:
http://www.adorama.com/alc/0012810/article/15-Low-Light-High-ISO-All-Stars
• There are also cameras that operate under conditions of "no light". These are generally infrared cameras that are equipped with IR light sources.

Single-beam side-scan sonar
Single-beam side-scan sonarSide scan sonar uses narrow beams of acoustic energy transmitted out
to the side of the towfish and across the bottom.
Sound is reflected back from the bottom and from objects to the towfish.
Hard objects reflect more energy producing a strong signal, soft objects that do not reflect acoustic energy as well show up as lower (darker) signals.
1. Depth to inside of acoustic path.2. Vertical beam angle.3. Range setting in software (maximum
acoustic range).4. Swath width across seafloor.5. Tow depth of side scan sonar.6. Port and starboard channel separation.7. Horizontal beam width.http://www.starfishsonar.com/technology/sidescan-sonar.htm

Singe-beam side-scan sonar
Single-Beam Side Scan Sonar

Single-beam side-scan sonar
Single-beam side-scan sonar

Singe-beam side-scan sonar
Single-Beam Side Scan Sonar
Swedish steamer S/S Nedjan
resting at 32 m depth. Built in 1893, sunk in 1954, found in 1996.

Mult-beam side-scan sonar
Multi-beam side-scan sonarMulti-beam side scan sonars use beam steering and
focusing techniques, allowing several simultaneous adjacent parallel beams to be generated per side.
This results in a higher resolution image and allows for faster towing speeds (> 5 knots)

Multi-beam side-scan sonar
Dynamically Focused Multi-Beam Side Scan Sonar
(Klein System 5000)

A 100 kHz, 150 Meter range side scan image.
Profile shows silt, some layering with hard contacts within the silt, and bedrock rising a little above the silt.
All data collected simultaneously, in rough sea conditions.

Multi-beam side-scan sonar
Multi-Beam Side Scan Sonar (Klein System 2000)
Bottom profiling
100 m
10 m