Upload
tsuoscaradrian
View
231
Download
0
Embed Size (px)
Citation preview
8/13/2019 CARRO ELECTRICO.pdf
1/90
i
UNIVERSIDAD TECNOLGICA DE LAMIXTECA
Diseo y construccin de un vehculo elctrico
con variador de velocidad mediante un convertidor
CD CD
Tesis para obtener el ttulo de:
Ingeniero en Electrnica
Presenta:
Gerardo Israel Palafox Alvarado
Director de tesis:
M.C. Jacob J. Vsquez Sanjun
Huajuapan de Len, Oaxaca, diciembre de 2009.
8/13/2019 CARRO ELECTRICO.pdf
2/90
vi
ndice
ndice .................................................................................................................................................... viindice de figuras y tablas .................................................................................................................... xiResumen .............................................................................................................................................. xvIntroduccin ...................................................................................................................................... xviiObjetivos ............................................................................................................................................ xxi
General ........................................................................................................................................... xxiEspecficos ..................................................................................................................................... xxi
Contenido de la tesis ....................................................................................................................... xxiiiCaptulo 1 .............................................................................................................................................. 1Marco Terico ...................................................................................................................................... 1
1. 1 Estado del arte .......................................................................................................................... 11. 1. 1 Introduccin ..................................................................................................................... 11.1.2 Bateras ................................................................................................................................ 21.1.3 Propulsin elctrica ........................................................................................................... 31.1.4 Propulsin de los vehculos elctricos ............................................................................ 31. 1. 5 Motores ............................................................................................................................. 4
1. 2 Antecedentes ............................................................................................................................. 61. 2. 1 Historia de la electrnica de potencia ........................................................................... 61. 2. 2 Dispositivos semiconductores de potencia ................................................................. 61. 2. 3 Caractersticas de control de dispositivos de potencia ............................................. 101. 2. 4 Tipos de circuitos electrnicos de potencia ............................................................... 10
1. 3 Pulsadores de CD ................................................................................................................... 111. 3. 1 Clasificacin de pulsadores .......................................................................................... 11
1. 3. 1. 1 Pulsador de clase E ............................................................................................... 12
8/13/2019 CARRO ELECTRICO.pdf
3/90
viii
1. 3. 2 Diseo de un circuito pulsador ................................................................................... 13 1. 4 Importancia del uso de motores elctricos ........................................................................ 141. 5 Necesidad del aumento de control de potencia ................................................................ 151. 6 Importancia del uso de controles de motor ....................................................................... 151. 7 Disponibilidad de nuevas tecnologas ................................................................................. 17
1. 7. 1 Circuitos integrados para el control de motores....................................................... 18 1. 8 Traccin elctrica ................................................................................................................... 19
1. 8. 1. 1 Tipos de motores para automviles elctricos ................................................. 191. 8. 1. 2 Ventajas y desventajas de los diferentes tipos de motores ............................. 20
1.9 Modelado matemtico de motores de CD de imn permanente ..................................... 21Capitulo 2 ............................................................................................................................................ 27Diseo del Sistema............................................................................................................................. 27
2.1 Caractersticas especficas ...................................................................................................... 272.2 Requerimientos y especificaciones ....................................................................................... 30
2.2.1 Diseo de la etapa lgica ................................................................................................ 312.2.2 Diseo de la etapa de acoplamiento ............................................................................. 392.2.3 Diseo de la etapa de Potencia ...................................................................................... 43
Capitulo 3 ............................................................................................................................................ 45Implementacin del sistema ............................................................................................................. 45
3.1 Implementacin del sistema digital ...................................................................................... 453.2 Implementacin del sistema de acoplamiento .................................................................... 463.3 Implementacin del sistema de potencia ............................................................................. 49 3.4 Elaboracin del circuito impreso y el montaje en placa .................................................... 523.5 Implementacin del sistema mvil de pruebas ................................................................... 55
Capitulo 4 ............................................................................................................................................ 59Pruebas y resultados .......................................................................................................................... 59
8/13/2019 CARRO ELECTRICO.pdf
4/90
ix
4.1 Sistema digital .......................................................................................................................... 594.2 Sistema de acoplamiento ........................................................................................................ 614.3 Sistema de potencia ................................................................................................................. 63
Conclusiones ....................................................................................................................................... 69Trabajos futuros ................................................................................................................................. 71Referencias bibliogrficas .................................................................................................................. 73Pginas web ......................................................................................................................................... 75Anexo 1 ................................................................................................................................................ 77Anexo 2 ................................................................................................................................................ 81
8/13/2019 CARRO ELECTRICO.pdf
5/90
xi
ndice de figuras y tablas
Figura 1.1. Diagrama a bloques funcional del sistema de propulsin de los VE. ....................... 3Tabla 1.1. Aplicacin de motores de VEs ....................................................................................... 4Figura 1.2. Clasificacin de los motores de VE. .............................................................................. 5Figura 1.3. Historia de la electrnica de potencia. .......................................................................... 6Tabla 1.2. Especificaciones de los dispositivos semiconductores de potencia. .......................... 7Figura 1.4. Resistencia de canal para MOSFET. ............................................................................. 8Tabla 1.3. Comparacin entre IGBT y MOSFET .......................................................................... 9Figura 1.5. Evolucin de los dispositivos de potencia. ................................................................... 9Figura 1.6. Clasificacin de los pulsadores. .................................................................................... 12Figura 1.7. Circuito pulsador clase E. .............................................................................................. 12Figura 1.8. Polaridades y dispositivos del circuito pulsador clase E. .......................................... 13Figura 1.9. Ganancias en USA por la automatizacin de fbricas con controles de motores.17Figura 1.10. Modelado elctrico de un motor de cd de imn permanente. ............................... 21Figura 1.11. Diagrama de estado de un motor de cd. ................................................................... 23Figura 1.12. Diagrama a bloques de un sistema de motor de cd. ................................................ 24Figura 2.1. Diagrama a bloques del sistema propulsor. ................................................................ 27Figura 2.2. Medidor de corriente comercial.................................................................................... 28Figura 2.3. SHUNT. ........................................................................................................................... 29Figura 2.4. Diagrama de conexiones para medir la corriente consumida por el sistema
electrnico. .......................................................................................................................................... 29Figura 2.5. Diagrama a bloques del sistema de control del sistema propulsor. ......................... 30Figura 2.6. Seales de PWM con variacin de ciclos de trabajo. ................................................. 32Figura 2.7. Seal de PWM generada a partir de amplificadores operacionales. ........................ 32
8/13/2019 CARRO ELECTRICO.pdf
6/90
xii
Figura 2.8. Seales de entrada y salida del microcontrolador. ..................................................... 33Figura 2.9. Diagrama de flujo. .......................................................................................................... 36Figura 2.10. Fuentes de alimentacin. ............................................................................................. 37Figura 2.11. Seales de reinicio y pedal de aceleracin. ................................................................ 38Figura 2.12 Interruptor de principal, seal de direccin y pines de programacin. ................. 38Figura 2.13 seales de ajuste de corriente y shunt. ....................................................................... 39Figura 2.14. Seales de PMW mejoradas. ....................................................................................... 40Figura 2.15. Diagrama de conexiones de la etapa de acoplamiento. .......................................... 41Figura 2.16. Aplicacin de los MOSFET S de potencia. ............................................................. 43Figura 2.17. Diagrama de conexiones de los MOSFETS en paralelo. ....................................... 44Figura 3.1. Ventana principal del software ARV Studio 4. .......................................................... 45Figura 3.2. Diagrama general de conexiones. ................................................................................ 47Figura 3.3. Encapsulado del MOSFET IRFPS3810. .................................................................... 49Figura 3.4. Encapsulado y diagrama esquemtico interno del MOSFET STE250NS10. ....... 50Figura 3.5. Encapsulado y diagrama esquemtico interno del DIODO STPS200170TV1. ... 50Figura 3.6. Diagrama de conexiones del circuito electrnico de potencia. ............................... 51Figura 3.7. Cara superior de la placa del circuito impreso. .......................................................... 52Figura 3.8. Cara inferior de la placa del circuito impreso. ............................................................ 52Figura 3.9. Circuito impreso en la placa de cobre. ........................................................................ 53Figura 3.10. Circuito impreso de dos caras. ................................................................................... 54Figura 3.11. Circuito electrnico de control. ................................................................................. 54 Figura 3.12. Chasis del vehculo elctrico. ...................................................................................... 55Figura 3.13. Motor conectado directamente al eje de traccin. .................................................. 56 Figura 3.14. Juego de engranes. ....................................................................................................... 56Figura 3.15. Sistema de frenado del vehculo elctrico. ................................................................ 57Figura 3.16. Adaptacin del potencimetro al pedal de aceleracin. ......................................... 57
8/13/2019 CARRO ELECTRICO.pdf
7/90
xi
Figura 4.1. Seales de activacin H1 y L1 generadas por el microcontrolador. ....................... 59Figura 4.2. Seales de activacin H2 y L2 generadas por el microcontrolador. ....................... 60Figura 4.3. Seales mejoradas Hout1 y Lout1 obtenidas del IR21110. ...................................... 61Figura 4.4. Seales mejoradas Hout2 y Lout2 obtenidas del IR21110. ...................................... 61Figura 4.5. Comparacin de seales de entrada y salida del IR2110. .......................................... 62Figura 4.6. Seal obtenida en las terminales del motor con una punta de osciloscopio normal.
............................................................................................................................................................... 63Figura 4.7. Variacin de velocidad del motor con un ciclo de trabajo del 15%........................ 63Figura 4.8. Variacin de velocidad del motor con un ciclo de trabajo del 90%........................ 64Figura 4.9. Sistema electrnico montado en el vehculo elctrico. ............................................. 64
Figura 4.10. Corriente consumida por el sistema. ......................................................................... 65Figura 4.11. Variacin del ciclo de trabajo de la seal de PWM. ................................................ 65Figura 4.12. Tacmetro. .................................................................................................................... 66Figura 4.13. Adaptacin de tacmetro al eje de traccin del vehculo elctrico. ...................... 67Figura 4.14. Grfica de las RPM obtenidas por el tacmetro. ..................................................... 67
Figura 4.15. Grfica de las RPM obtenidas por el tacmetro en una segunda prueba. ........... 68
Figura 4.16. Voltaje obtenido en el motor. ..................................................................................... 68
8/13/2019 CARRO ELECTRICO.pdf
8/90
xv
Resumen
En este trabajo de tesis se disea y se construye un vehculo elctrico monoplaza
accionado por un sistema electrnico de potencia con el cual se regula la velocidad de un
motor de corriente directa (CD).
Se construy el chasis de un vehculo elctrico para probar el sistema electrnico, sus
dimensiones son 90 cm de ancho por 140 cm de largo, y se realizaron pruebas con una carga
de ms de 200 Kg. de peso.
Se dise e implement un convertidor CD CD basado en dispositivos
semiconductores de potencia, el cual consta principalmente de tres partes: la primera es una
etapa lgica formada por un microcontrolador que en funcin de una comparacin entre una
seal de entrada de referencia y una seal triangular fija, se generan diferentes seales PWM;
la segunda es la de potencia, que recibe las seales de PWM generadas en la etapa lgica y
proporciona la energa suficiente para controlar la velocidad del motor de CD; la ltima es la
encargada del acoplamiento entre la etapa lgica y la etapa de potencia. La corriente mxima
de pico que se le puede demandar al convertidor es de 220A.
8/13/2019 CARRO ELECTRICO.pdf
9/90
xv
Introduccin
A principios del siglo XX, tres tipos de automviles competan por el mercado:
elctricos, a vapor y gasolina; sin embargo, en poco ms de una dcada los autos a gasolinadominaron los prximos 100 aos.
En la actualidad, los medios de transporte son los responsables del 50% de la
contaminacin total del planeta, esta cifra muestra el gran problema que presenta la
contaminacin ambiental [URL 7]. Con el uso de medios alternativos de energa para el
sistema de transporte se pueden reducir notablemente los ndices de contaminacin [URL 9].
A principios de 1990 se inici una dcada de inters de la sociedad por los vehculos
elctricos, debido al incremento de los costos de la gasolina y su dependencia en otras
naciones, junto con la reciente atencin sobre el dao climtico creado por las mquinas de
combustin. Los vehculos a gasolina han sido etiquetados como la mayor fuente de
emisiones que crean la contaminacin del aire, 43 % de gases orgnicos (NMOG), 57% de
oxido de nitrgeno (NOX) y 82% de monxido de carbono (CO) [7]. Recientes
investigaciones, sitan a Mxico con una contaminacin superior a Hong Kong, India,
Vietnam e Indonesia [8].
La gran mayora de los vehculos en uso actualmente estn diseados para ser
alimentados por un determinado combustible, con el inconveniente que esta limitacin
implica que cuando ese combustible escasee o se agote, el vehculo no se podr usar ms; sin
embargo existen posibles sustitutos para el petrleo, pero por ahora son relativamente caros.
Los vehculos que se desarrollen de ahora en adelante debern ser propulsados por
una forma de energa de fcil distribucin y que pueda provenir de distintas fuentes. La nica
forma de energa que rene todas estas condiciones es la electricidad. En efecto, cualquiera
dispone de energa elctrica en su propio domicilio, especialmente en reas urbanas y
suburbanas.
8/13/2019 CARRO ELECTRICO.pdf
10/90
xviii
En la actualidad la mayor parte de la electricidad proviene del empleo de
combustibles no renovables, que se obtienen de diversas fuentes (hidroelctrica,
termoelctrica, nuclear, etc.). De esta manera se podra reservar al gas y al petrleo para usos
en los que su sustitucin an es compleja (fundamentalmente lapetro-qumica).
Utilizar medios de transporte con motores elctricos es una opcin para ayudar a
combatir el problema de la contaminacin; su funcionamiento es conveniente porque son
silenciosos y no utilizan gasolina y aceite [URL 8].
El uso masivo de los vehculos elctricos (VE) en principio no obligara a
incrementar rpidamente la capacidad de generacin elctrica, ya que sus bateras se podran
cargar de noche, cuando la demanda de energa elctrica disminuye considerablemente. Parainducir al usuario a esta costumbre, en algunos pases ya existe la legislacin que establece
tarifas de electricidad ms econmicas para los horarios nocturnos [24].
Durante el da las bateras se pueden cargar usando energa solar, es decir, mediante
celdas solares que conviertan la energa solar en energa elctrica, las cuales pueden estar
acopladas al VE o bien, si el vehculo permanece estacionado durante el da, podran ubicarse
en el techo del estacionamiento y as tener una mayor superficie de captacin de energa
solar.
Actualmente en los pases de Suiza, Alemania, Austria, Francia e Italia existe una red
de energa solar llamada Park & Charge que utiliza el concepto de estaciones pblicas
para cargar los vehculos elctricos. [23]
En 1899 el francs Jnatzy con su vehculo elctrico Jamais Contente super por
primera vez la barrera de los cien kilmetros por hora. Los transportes de carcter colectivocomo trenes, tranvas, trolebuses y subterrneos, fueron los primeros en hacer la
transformacin de motor de combustin a elctrico de forma masiva.
8/13/2019 CARRO ELECTRICO.pdf
11/90
xi
Como se mencion anteriormente, el vehculo elctrico presenta un nmero
significativo de ventajas con respecto al de combustin interna. Entre las principales se
pueden mencionar:
Contaminacin nula de gases de escape, Sustantiva simplificacin mecnica, Par-motor constante (incluso en el arranque), Alta eficiencia, Bajo ruido, Bajo costo de operacin y mantenimiento. Adems presenta una amplia variedad de fuentes de energa.
Como se puede apreciar, los vehculos elctricos son hoy una realidad en marcha.
Por lo tanto, constituyen un desafo para:
Las instituciones pblicas, que deben comprender la importancia estratgica del temay producir las condiciones propicias que conduzcan al fortalecimiento de su
desarrollo tecnolgico.
Los tcnicos, que deben capacitarse en especialidades como mecnica estructural yde traccin (fabricacin de chasis, carroceras, ejes, etc.), la electrnica de potencia, lamicroelectrnica, la electricidad industrial, etc.
El planificador ambiental, que atento a la actual degradacin del medio ambiente,especialmente en sectores de alta densidad de poblacin, encuentra en el vehculo
elctrico un medio altamente efectivo para contrarrestar la peligrosa contaminacin
causada por los motores de combustin interna.
Y en general, para todo hombre preocupado por el medioambiente.
A continuacin se plantean los principales objetivos, en los cuales se bas el
desarrollo de este trabajo.
8/13/2019 CARRO ELECTRICO.pdf
12/90
xx
Objetivos
A continuacin se plantea el objetivo general del trabajo, y posteriormente de forma
detallada los objetivos especficos.
General
Disear e implementar un sistema de variacin de velocidad de un motor de CD
empleando un convertidor de CD CD puente completo tipo reductor y aplicarlo en la
construccin de un vehculo elctrico.
Especficos
Disear una etapa lgica con un microcontrolador para que en funcin de una sealde entrada de referencia, genere diferentes seales PWM, las cuales controlan los
dispositivos semiconductores de potencia.
Disear una etapa de potencia formada por circuitos semiconductores que recibanlas seales PWM generadas en la etapa lgica, logrando un control tanto de velocidad
como de sentido del giro del motor.
Implementar una etapa de acoplamiento entre las etapas lgica y de potencia. Elaborar una estructura metal-mecnica para probar el sistema accionador en un
vehculo monoplaza de tamao 90 x 140 cm (ancho y largo).
8/13/2019 CARRO ELECTRICO.pdf
13/90
xx
Contenido de la tesis
Este documento se divide en cinco captulos. A continuacin se hace una brevedescripcin de su contenido.
Captulo I: Contiene el marco terico que consiste en una recopilacin de datos de
diferentes fuentes bibliogrficas e informacin relacionada con la solucin del problema.
Captulo II: Se describe el diseo del sistema, en el cual se selecciona la solucin del
problema que emerge del captulo anterior y muestra las diferentes partes que lo componen
con una explicacin detallada de cada una de estas.
Captulo III: En este captulo se implementa el sistema electrnico, y se hace
mencin de los problemas que se tuvieron durante su desarrollo y se presenta la solucin de
los mismos.
Captulo IV: Se describen las pruebas y resultados obtenidos durante la
implementacin del sistema electrnico; se muestran las respuestas de las etapas delprototipo final y resultados finales.
Captulo V: Por ltimo se presentan las conclusiones del proyecto y los comentarios
del trabajo acerca de los objetivos planteados, as como algunas propuestas para trabajos
futuros y mejoras del mismo.
8/13/2019 CARRO ELECTRICO.pdf
14/90
1
Captulo 1
Marco Terico
Durante muchos aos ha existido la necesidad de adecuar la potencia elctrica de los
sistemas de traccin y de los sistemas industriales impulsados por motores elctricos.
La electrnica de potencia es una combinacin de la energa, la electrnica y el
control; la energa tiene que ver con el equipo de potencia esttica y rotativa (giratoria) para
la generacin, transmisin y distribucin de energa elctrica; la electrnica se ocupa de los
dispositivos y circuitos de estado slido para el control deseado; y el control se encarga del
rgimen permanente y de las caractersticas dinmicas de los sistemas de lazo cerrado.
Por lo anterior, la electrnica de potencia puede definirse como la aplicacin de la
electrnica de estado slido para el control y la conversin de la energa elctrica [4].
1. 1 Estado del arte
1. 1. 1 IntroduccinLas emisiones de contaminacin asociadas con Vehculos elctricos (VE) vienen de
la generacin de la electricidad para recargar las bateras, ms que de su operacin como
medio de transporte. En el peor de los casos, una generacin de energa que emplea
solamente carbn, generar emisiones contaminantes mucho menores que las emisiones
asociadas a vehculos que trabajan con gasolina. Una simulacin en 1995 que remplazaba los
vehculos a gasolina por elctricos (en el peor escenario) podran reducir enormemente las
emisiones: NMOG 98%, NOX 92%, CO 99%. Ya que la generacin elctrica se ubica enzonas no urbanas, las personas de las ciudades no son expuestas a estas emisiones [9].
La conversin de potencia y control forman las bases del campo conocido como
electrnica de potencia [10]. Recientemente la tecnologa de la electrnica de potencia ha
sido impulsada por las necesidades de controles eficientes en aplicaciones industriales, y el
8/13/2019 CARRO ELECTRICO.pdf
15/90
2
desarrollo de fuentes de alimentacin conmutadas de menor peso y tamao, para equipo de
computacin y comunicaciones [11]. En respuesta a las necesidades tecnolgicas de los VEs,
el desarrollo de la tecnologa en electrnica de potencia se ha acelerado.
Algunas compaas como GM, Nissan, BMW, Honda, Toyota, Mitsubishi y REVA
han desarrollado VEs [12]-[14]. Algunos vehculos elctricos emplean dispositivos
semiconductores de potencia llamados MOSFETs/IGBTs [URL 1].
1.1.2 Bateras
La energa y potencia especificas de bateras electroqumicas son mucho menores a
las entregadas empleando gasolina. Por esa razn, un nmero grande de bateras son
requeridas para asegurar un nivel de potencia aceptable. Sin embargo, un VE con muchasbateras presenta varios inconvenientes: La reduccin de espacio disponible en el interior, el
incremento del peso y costo del vehculo y la degradacin del rendimiento del vehculo. As,
el desarrollo de tecnologas de bateras se ha visto acelerado en los siguientes aspectos:
eficiencia, razn de carga, ciclo de vida, entorno operativo, seguridad, costo, reciclaje. Los
tipos de batera principalmente empleados han sido de cido de plomo (Pb-Acid). Otras se
basan en Nickel (Ni), presentando resultados interesantes en cuanto al peso. Otro tipo de
bateras Zinc-Halgeno tales como Zinc-Bromino (Zn-Br), y bateras de alta temperatura
tales como Sodio-Sulfuro (Na-S) son tambin atractivas [15]-[19].
Avances recientes emplean Ion-Litio (Io-Li), sin embargo requieren cobalto, que es
un material caro y trmicamente inestable. Una alternativa es sustituir el cobalto con
manganeso, ya que los electrodos de xido de manganeso son ms estables y ms baratos.
Compaq power ha desarrollado un nuevo material, estable a altas temperaturas, para
mantener separados los electrodos. Las clulas de las bateras de Continental, utilizan un
ctodo de hierro que es ms estable trmicamente que el xido de manganeso, adems debarato y abundante, los electrodos son de fosfatos [URL 2].
8/13/2019 CARRO ELECTRICO.pdf
16/90
3
1.1.3 Propulsin elctrica
La propulsin elctrica es la interfaz entre las bateras y las ruedas del vehculo,
transfiriendo energa en la direccin requerida, con alta eficiencia y controlando la etapa de
potencia todo el tiempo. Desde el punto de vista funcional, un sistema de propulsin
elctrico puede ser dividido en 2 partes: elctrico y mecnico. La parte elctrica incluye el
motor, el convertidor de potencia, y el controlador electrnico. La parte mecnica se forma
por el dispositivo de transmisin y las ruedas. Algunas veces el dispositivo de transmisin es
opcional. El lmite entre las partes elctrica y mecnica es el ncleo del motor, donde la
conversin de energa electromecnica toma lugar.
La propulsin elctrica, principalmente la electrnica de potencia, juega un rol muy
importante en los VEs, algunas veces esto se describe como el corazn de los VEs.
1.1.4 Propulsin de los vehculos elctricos
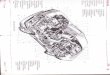
La figura 1.1 ilustra el diagrama a bloques funcional de un sistema de propulsin de un VE,
donde las flechas delgadas son seales, y las gruesas representan el flujo de potencia.
Figura 1.1. Diagrama a bloques funcional del sistema de propulsin de los VE.
Debido a la posibilidad de frenado regenerativo el flujo de potencia es reversible.
Dependiendo de la estrategia de control del motor y los datos obtenidos de los sensores, se
proporcionan al controlador electrnico las seales que se envan al convertidor de potencia.
Estas seales son amplificadas para activar los dispositivos de potencia. Finalmente, el motor
8/13/2019 CARRO ELECTRICO.pdf
17/90
8/13/2019 CARRO ELECTRICO.pdf
18/90
5
Figura 1.2. Clasificacin de los motores de VE.
Los imanes permanentes proveen de una larga vida al motor. El nico inconveniente
es el costo inicial reflejado en el precio de los motores. Adems de ferritas, se han
introducido nuevos materiales como el neodimio-acero-boro (Nd-Fe-B), Alnico, Samario-
Cobalto (Sm-Co). Debido a su alta induccin magntica y fuerza electromagntica y a su bajo
costo, el Nd-Fe-B promete aplicaciones en motores. Con estos nuevos super-imanes, un
nuevo nmero de topologas de motores con alta densidad y eficiencia, han sido
recientemente desarrolladas [21].
Tradicionalmente los motores de CD (con materiales con mejores caractersticas) se
han empleado en vehculos elctricos, sin embargo, el problema principal es el
mantenimiento en estos motores (conmutadores y escobillas).
Recientes desarrollos tecnolgicos han posicionado mejor a los motores de corriente
alterna (CA) con respecto de los de CD con las siguientes ventajas: alta eficiencia, altadensidad de potencia, bajo costo, mayor confiabilidad, y libres de mantenimiento. Ya que la
alta confiabilidad y la operacin libre de mantenimiento son consideraciones principales en la
propulsin de los vehculos elctricos, los motores de CA son ms atractivos [22].
8/13/2019 CARRO ELECTRICO.pdf
19/90
6
1. 2 Antecedentes
1. 2. 1 Historia de la electrnica de potencia
La primera revolucin electrnica inici en 1948 con la invencin del transistor de silicio; la
mayor parte de las tecnologas electrnicas avanzadas actuales tienen su origen en estainvencin. A travs de los aos, la microelectrnica moderna ha evolucionado a partir de los
semiconductores de silicio [4].
La segunda revolucin electrnica empez en 1958 con el desarrollo del tiristor
comercial. Ese fue el comienzo de la era de la electrnica de potencia. Y desde entonces, se
han introducido diversos tipos de dispositivos semiconductores de potencia y nuevas
tcnicas de conversin [4].
La revolucin de la microelectrnica dio la capacidad de procesar una gran cantidad
de informacin a grandes velocidades. La revolucin de la electrnica de potencia est dando
la capacidad de dar forma y controlar grandes cantidades de energa con una eficiencia cada
vez mayor.
A finales de los aos 80 y principios de los 90, la revolucin de la electrnica de
potencia tuvo un gran auge dentro de los avances tecnolgicos. La figura 1.3 muestra lahistoria de la electrnica de potencia [4].
Figura 1.3. Historia de la electrnica de potencia.
1. 2. 2 Dispositivos semiconductores de potencia
Desde que se desarroll el primer tiristor (SCR) a fines de 1957, han surgido grandes
adelantos en los dispositivos semiconductores de potencia. Hasta 1970, los tiristores
convencionales se haban utilizado en forma exclusiva para el control de la energa en
8/13/2019 CARRO ELECTRICO.pdf
20/90
8/13/2019 CARRO ELECTRICO.pdf
21/90
8
El transistor MOSFET de potencia presenta como principales ventajas la sencillez de
control (por voltaje) y rpida frecuencia de conmutacin (>300 KHz); su principal
inconveniente es que en conduccin se comporta como una resistencia (Ron), cuyo valor
aumenta considerablemente con el voltaje mximo del semiconductor (la variacin es
proporcional a VDS, figura 1.4). Su uso queda limitado para aplicaciones de bajo voltaje
(150 KHz), los MOSFET siguen siendo la mejor opcin [4]. En la tabla 1.3 se
presenta una comparacin entre ambos dispositivos semiconductores.
8/13/2019 CARRO ELECTRICO.pdf
22/90
9
Caractersticas MOSFET IGBT
Mtodo de control Voltaje Voltaje
Control del circuito Simple Simple
Impedancia de entrada Alto Alto
Potencia de control Bajo BajoVelocidad de transicin Rpido(ns) Medio
Frecuencia de operacinRpido
(
8/13/2019 CARRO ELECTRICO.pdf
23/90
10
1. 2. 3 Caractersticas de control de dispositivos de potencia
Los dispositivos semiconductores de potencia se pueden operar como interruptores
mediante la aplicacin de seales de control a la terminal de compuerta de los tiristores (y a
la base de los transistores bipolares). La salida se controla mediante la variacin del tiempo
de conduccin de estos dispositivos de conmutacin [4].
Los dispositivos semiconductores de potencia se pueden clasificar a partir de:
Activacin y desactivacin sin control (diodo). Activacin controlada y desactivacin sin control (SCR). Caractersticas de activacin y desactivacin controladas (BJT, MOSFET, GTO,
SITH, IGBT, SIT, MCT).
Requisito de seal continua en la compuerta (BJT, MOSFET, IGBT, SIT). Requisito de pulso en la compuerta (SCR, GTO, MCT). Capacidad de soportar voltajes bipolares (SCR, GTO). Capacidad de soportar voltajes unipolares (BJT, MOSFET, GTO, IGBT, MCT). Capacidad de corriente bidireccional (TRIAC, RCT). Capacidad de corriente unidireccional (SCR, GTO, BJT, MOSFET, MCT, IGBT,
SITH, SIT, diodo).
1. 2. 4 Tipos de circuitos electrnicos de potencia
Para el control de la potencia elctrica o del acondicionamiento de la misma, es
necesario convertir la potencia de una forma a otra; las caractersticas de conmutacin de los
dispositivos semiconductores de potencia permiten dicha conversin. Los convertidores de
potencia estticos llevan a cabo estas funciones [4].
Los circuitos electrnicos de potencia se pueden clasificar en seis tipos:
Rectificadores de diodos. Convertidores de CA-CD (rectificadores controlados). Convertidores de CA-CA (controladores de voltaje de CA). Convertidores de CD-CD (pulsadores de CD).
8/13/2019 CARRO ELECTRICO.pdf
24/90
11
Convertidores de CD-CA (inversores). Interruptores estticos.
La seleccin de un dispositivo depender del voltaje, la corriente y los requisitos de
velocidad del convertidor.
El trabajo realizado se basa en un convertidor de CD CD, para entenderlo mejor, a
continuacin se explica cmo funcionan estos dispositivos [4].
1. 3 Pulsadores de CD
Los pulsadores de CD tambin conocidos como convertidores de CD a CD, se
pueden considerar como un equivalente a un transformador de CA con una relacin de
vueltas que vara en forma continua; al igual que un transformador, pueden utilizarse como
una fuente reductora o elevadora [4].
Los pulsadores de CD se utilizan ampliamente en el control de los motores de
traccin para automviles, tranvas elctricos, gras marinas, montacargas y elevadores de
minas. Proporcionan control en aceleraciones continuas, alta eficiencia, respuesta rpida y
dinmica. Los pulsadores se pueden utilizar para el frenado regenerativo de motores de CD,para devolver la energa a la alimentacin, caracterstica que permiten un ahorro de energa
en aquellos sistemas de transporte que hacen paradas frecuentes [4].
1. 3. 1 Clasificacin de pulsadores
Dependiendo de la direccin en la que fluyan la corriente y el voltaje (ver figura 1.6),
los pulsadores se clasifican en cinco tipos, estos son [4]: pulsador de clase A, clase B, clase C,
clase D, y clase E.
8/13/2019 CARRO ELECTRICO.pdf
25/90
12
Figura 1.6. Clasificacin de los pulsadores.
1. 3. 1. 1 Pulsador de clase E
La corriente de carga puede ser positiva o negativa, como se observa en la figura 1.6-
e; el voltaje de carga tambin puede ser positivo o negativo, ste se conoce como pulsador de
cuatro cuadrantes. Se pueden combinar dos pulsadores de clase C para formar un pulsador
de clase E (ver figura 1.7). Las polaridades de voltaje de la carga y de la corriente se muestran
en la figura 1.8-a; los dispositivos que operan en los diferentes cuadrantes aparecen en la
figura 1.8-b. Para operar en el cuarto cuadrante, deber invertirse la operacin de la batera E[4].
Figura 1.7. Circuito pulsador clase E.
a) Clase A b) Clase B c) Clase C
d) Clase D e) clase E
0 IL iL
vLVL
0 IL iL
vLVL
-IL 0 iL
vLVL
-IL 0 iL
vLVL
-IL 0 IL iL
vLVL
-IL 0 IL iL
vLVL
0 IL iL
vLVL
-VL
0 IL iL
vLVL
-VL
IL 0 IL iL
vLVL
-VL
IL 0 IL iL
vLVL
-VL
+
iL
D2
-
E
VL
Vs
RL
S2
S1S3
S4
D1D3
D4
8/13/2019 CARRO ELECTRICO.pdf
26/90
13
Figura 1.8. Polaridades y dispositivos del circuito pulsador clase E.
1. 3. 2 Diseo de un circuito pulsador
El requisito principal para el diseo de los circuitos de conmutacin es proporcionar
un tiempo adecuado de desactivacin, a fin de poder desconectar el dispositivo
semiconductor principal [4].
Es ms sencillo disear el circuito de conmutacin si la inductancia de la
alimentacin se puede despreciar o si la corriente de la carga no es alta. Pero en el caso de
una corriente ms alta en la carga, las inductancias dispersas siempre presentes en los
sistemas reales, juegan un papel significativo en el diseo del circuito. Los esfuerzos queimponen los voltajes sobre los dispositivos semiconductores de potencia dependen de la
inductancia de la fuente y de la corriente de la carga [4].
En general el diseo incluye los siguientes pasos:
Identificar los modos de operacin del circuito pulsador. Determinar los circuitos equivalentes para los diversos modos de operacin.
Determinar las corrientes y los voltajes de estos modos y sus formas de onda. Evaluar los valores de los componentes de conmutacin que satisfagan los lmites del
diseo.
Determinar los requisitos de especificacin de voltaje de todos los componentes ydispositivos.
a) Polaridades b) dispositivos en conduccin
IL
VL
Inversin Rectificacin
Rectificacin Inversin
VL +Ve
iL -Ve
VL +Ve
iL +Ve
VL -Ve
iL -Ve
VL -Ve
iL +Ve
IL
VL
Inversin Rectificacin
Rectificacin Inversin
VL +Ve
iL -Ve
VL +Ve
iL +Ve
VL -Ve
iL -Ve
VL -Ve
iL +Ve
IL
VL
S2, D4
D4, D1
S1, S4
D2, D4
S3, S2
S2, D4
S4, D2
D2, D3
IL
VL
S2, D4
D4, D1
S1, S4
D2, D4
S3, S2
S2, D4
S4, D2
D2, D3
8/13/2019 CARRO ELECTRICO.pdf
27/90
14
Una alta frecuencia de pulsacin reduce el tamao de los elementos del filtro de
entrada. Pero las frecuencias de las armnicas generadas por el pulsador tambin se
incrementan en la lnea de alimentacin, esto puede causar problemas de interferencia con
las seales de control y de comunicaciones [4].
1. 4 Importancia del uso de motores elctricos
Avances recientes en bateras de alta energa, combinados con el desarrollo de
motores ms pequeos y ms potentes, han abierto nuevos mercados para un amplio rango
de nuevos productos, incluyendo aplicaciones porttiles, equipo de entretenimiento y
vehculos elctricos. La conveniencia de dispositivos tales como taladros porttiles,
podadoras, y otras herramientas han resultado del rpido crecimiento del control de motores.
Un nuevo nfasis en el diseo de motores se ha concentrado en un bajo consumo de energapara extender la vida til de las bateras, proporcionando as ms horas de duracin [3].
Las preocupaciones de los diseadores, para un funcionamiento mejorado y mayor
eficiencia de operacin no se limitan a aplicaciones porttiles. La siguiente generacin de
motores, en muchas aplicaciones industriales, tomar ventaja de los cambios que puedan
ocurrir tanto en los motores como en los sistemas electrnicos que los controlarn y
protegern. Los controladores electrnicos de motores estn teniendo mejoras en su
empaque, control y potencia, adems de que la interconexin y comunicacin permite a los
motores trabajar ms eficientemente, adaptndose rpidamente a las nuevas aplicaciones [6].
El tamao de un motor puede ser pequeo, desde una pequea fraccin de Watt
hasta varios kilowatts, dependiendo de la aplicacin. Las tcnicas de control han cambiado
de analgicas a digitales. La mejora de la tecnologa en los semiconductores y los esquemas
de control pueden ser implementados por un avance en los circuitos integrados,
incrementando as la eficiencia de los dispositivos de potencia. Los motores estncambiando debido a los nuevos materiales magnticos, laminaciones y embobinados [2].
Los motores elctricos tienen directamente un gran impacto en la calidad de vida,
esencialmente en calentadores y enfriadores de agua, aspiradoras, lavadoras de ropa, lava
trastes, herramientas, as como en distintas formas de entretenimiento. El nmero de
8/13/2019 CARRO ELECTRICO.pdf
28/90
15
motores que se pueden encontrar en casa, fcilmente pueden ser ms de 50, mientras
algunos automviles fcilmente pueden exceder los 60 motores, stos pueden estar en los
limpia parabrisas, vidrios, espejos elctricos, etc. [5].
1. 5 Necesidad del aumento de control de potencia
Los motores consumen aproximadamente el 50% de la electricidad generada en
USA, cuando no se est realizando algn tipo de trabajo til, se llega a consumir un 10% de
esa energa; debido a esto los motores requieren un control ms eficiente [5].
Los motores funcionan con mayor eficiencia a altas velocidades, el ruido producido
por las altas velocidades es determinante para el desempeo de los trabajadores. El ruido
excesivo de los motores, puede ser reducido haciendo una disminucin en la velocidad delcontrolador del motor evitando los puntos de operacin resonantes. Las unidades de
operacin en velocidades ptimas pueden producir menor ruido, previendo as un entorno
agradable de trabajo. Como resultado, los motores con velocidad variable son atractivos para
muchas aplicaciones nuevas. Los controladores de frecuencia variable proveen un ilimitado
nmero de puntos de operacin y una reduccin considerable del ruido [5].
La calidad de aire en el interior de los edificios cerrados es una preocupacin
creciente, el incremento del aire acondicionado en pases en desarrollo ha creado un mercado
potencial para los controladores de motores. Un ejemplo claro es China, que increment al
doble su consumo, de 5 millones a 10 millones de unidades en el ao 2000 [5].
1. 6 Importancia del uso de controles de motor
Los beneficios de utilizar controles de motores no ocurren sin algunas implicaciones
controversiales, incluyendo la necesidad de compatibilidad electromagntica, y la
disminucin de la interferencia electromagntica, deteriorando la calidad de potencia basada
en el incremento del uso de controles digitales, la preocupacin por la descarga electrosttica
como principal problema para los componentes semiconductores y nuevos aspectos de
seguridad. No importa que terminologa sea utilizada para la conmutacin del control digital
del motor controlador de velocidad variable (CVV), controlador de frecuencia variable
8/13/2019 CARRO ELECTRICO.pdf
29/90
16
(CFV) , o controlador de velocidad ajustable (CVA) la conmutacin del voltaje puede
causar interferencia electromagntica [5].
Las descargas electrostticas pueden causar daos en los dispositivos
semiconductores de potencia y en los circuitos integrados. Afortunadamente, en los
controles electrnicos, incluyendo la circuitera y los componentes semiconductores, pueden
tratar los campos electromagnticos, la calidad de potencia y las descargas electroestticas.
Estas soluciones se suman a otros elementos de complejidad para los sistemas de control de
motores [5].
8/13/2019 CARRO ELECTRICO.pdf
30/90
17
1. 7 Disponibilidad de nuevas tecnologas
El control de motores avanza a medida que mejoran las tecnologas motrices, nuevas
y revisadas tcnicas de control de motores, circuitos integrados diseados especficamente
para aplicaciones de control de motores, y mejoramientos en circuitos semiconductores depotencia. Muchas de estas mejoras permiten el uso de sistemas que anteriormente eran muy
caros o tcnicamente muy complejos. Como resultado, existe un cambio en el tipo de
motores empleados para diferentes aplicaciones [5].
La reduccin de costos es un importante aspecto del incremento en controladores
digitales de motores. Por ejemplo, el costo para un controlador de motor industrial de 750
Watts decremento de $685 dlares en 1981 a $465 dlares en 1994. La reduccin de costos
es similar para todos los niveles de potencia [5].
En la automatizacin de fbricas en Estados Unidos, los motores controlados
electrnicamente produjeron arriba de $3 billones de dlares en ventas en el ao de 1995
como se observa en la figura 1.9. La tecnologa est cambiando a favor de los motores
trifsicos de AC y los motores sin escobillas (brushless) de CD; para el ao 2000 las
ganancias rebasaron los $4.3 billones de dlares en ventas. En Norte Amrica, el 34% de los
motores de AC son utilizados para ventiladores y bombas de agua [5].
Figura 1.9. Ganancias en USA por la automatizacin de fbricas con controles de motores.
Pasos4 %
SinescobillasDC 16 %
DC conescobillas de
imnpermanente
35 %
ACInduccin
45 %
Pasos4 %
Sin escobillasDC 20 %
DC conescobillas de
imnpermanente
23 %
ACInduccin
53 %
1995Total = $3.1 billones 2000Total = $4.3 billones
Pasos4 %
SinescobillasDC 16 %
DC conescobillas de
imnpermanente
35 %
ACInduccin
45 %
Pasos4 %
Sin escobillasDC 20 %
DC conescobillas de
imnpermanente
23 %
ACInduccin
53 %
1995Total = $3.1 billones 2000Total = $4.3 billones
8/13/2019 CARRO ELECTRICO.pdf
31/90
18
1. 7. 1 Circuitos integrados para el control de motores
Uno de los esfuerzos iniciales para simplificar el control de motores fue la
introduccin de circuitos integrados especficos para el control de motores, los primeros
aparecieron a mediados de los 80s. Estos ejemplificaron algunos de los requerimientos
claves para la conmutacin y proteccin de transistores de potencia [3].
Uno de los primeros circuitos integrados para combinar controles de motor y
dispositivos de potencia en un solo encapsulado fue desarrollado para una aplicacin en una
cmara de video. La cmara requera de alta eficiencia en un espacio limitado y en un circuito
impreso flexible. Un puente H completo de MOSFETs fue integrado con una circuitera de
control de CMOS en un circuito integrado monoltico que poda ser utilizado para montajes
de superficie [3].
Los tres tipos principales de dispositivos semiconductores normalmente utilizados
para los controladores de motor son: Circuitos integrados analgicos, microcontroladores y
transistores de potencia [3].
Adems de variar la velocidad del motor o su fuerza de torsin, los controles
electrnicos del motor tambin se pueden utilizar para medir la temperatura, ruido, etc. y
para comunicarse con otros sistemas electrnicos [3].
Es importante que los sistemas a base de motores tengan la capacidad de
comunicarse con otros equipos electrnicos. Si varios motores encienden al mismo tiempo,
la corriente elctrica puede exigir altas demandas aumentando la infraestructura elctrica. Si
existiera un encargado de la carga que pueda comunicarse con las aplicaciones elctricas ms
grandes, un interruptor controlado ayudara a optimizar su operacin, as tambin se puede
proporcionar la informacin sobre el estado de cada unidad [3].
8/13/2019 CARRO ELECTRICO.pdf
32/90
19
1. 8 Traccin elctrica
La traccin se define como un sistema para obtener el movimiento de un vehculo
[URL 14]. Entonces, la traccin elctrica se puede definir como la obtencin del movimiento
de un vehculo mediante el uso de la energa elctrica, esto es, haciendo uso de motoreselctricos.
Se pueden distinguir tres periodos en los avances de la traccin elctrica:
El primer periodo llega hasta 1905 y se caracteriza por la aparicin del motorelctrico de corriente continua. La locomotora elctrica es entonces una mquina
autnoma semejante a la de vapor y su energa se obtiene mediante pilas o
acumuladores.
El segundo periodo est unido al desarrollo del transformador de corriente alterna, elcual posibilita corrientes de tensin elevadas. A partir de este momento la corriente
se va a producir en lugares alejados de la mquina, con lo cual sta va perdiendo su
autonoma. Aparecen diversos tipos de electrificaciones: de corriente continua o
alterna.
El tercer periodo comienza antes de la Segunda Guerra Mundial, con la aparicin deconvertidores que permitirn transformar la corriente alterna en corriente continua
en el interior de la locomotora [URL 15].
1. 8. 1 Motores de traccin elctrica1. 8. 1. 1 Tipos de motores para automviles elctricos
El tipo de motor elctrico ms empleado en traccin de automviles elctricos es el
de corriente continua, ya que es de fcil regulacin. La regulacin puede ser clsica con
resistencias, o por puente rectificador controlado. Esta ltima es electrnica y se emplea
segn el tipo de alimentacin. La mayor desventaja de los motores de corriente continua es
su elevado costo de mantenimiento [URL 16].
Dentro de los motores de corriente alterna, el ms usado es el asncrono, trifsico y
monofsico. Actualmente se regulan electrnicamente regulando la tensin y la frecuencia de
la alimentacin por medio de onduladores semicontrolados. Los motores sncronos
necesitan un ondulador totalmente controlado en el inducido y puente rectificador en el
8/13/2019 CARRO ELECTRICO.pdf
33/90
20
inductor. Al ser necesario controlar exactamente la frecuencia de alimentacin, su regulacin
es difcil, siendo poco usado [URL 16].
1. 8. 1. 2 Ventajas y desventajas de los diferentes tipos de motores
Corriente continua:
Ventajas:o Sencillez en electrnica de control.o Sistemas de control econmicos y precisos.
Inconvenientes:o No son libres de mantenimiento.o Mayor peso y volumen para misma potencia y par que su
correspondiente en corriente alterna.Corriente alterna:
Ventajas:o Robustez mecnica y elctrica.o Reducido peso.o Precio.
Inconvenientes:o Electrnica de potencia, control menos preciso.
8/13/2019 CARRO ELECTRICO.pdf
34/90
21
1.9 Modelado matemtico de motores de CD de imn
permanente
Ya que los motores de cd se usan en forma extensa en sistemas de control, para
propsitos de anlisis, es necesario establecer modelos matemticos para los motores de cdpara aplicaciones de control. Se utilizar el diagrama elctrico de la figura 1.10 para
representar un motor de cd de imn permanente [25].
Figura 1.10. Modelado elctrico de un motor de cd de imn permanente.
El circuito de armadura se modela con una resistencia Ra conectada en serie a una
inductancia La , y a una fuente de voltaje eb la cual representa la fuerza contraelectromotriz
en la armadura cuando el rotor gira [25]. Las variables y parmetros del motor se definen
como sigue:
iat= Corriente de armadura La = Inductancia de la armaduraRa = Resistencia de armadura eat = Voltaje aplicado
ebt= Fuerza contraelectromotriz Kb = Constante de la fuerza contraelectromotrizTLt= Par de carga = Flujo magntico en el entre hierro
Tm
t
= Par del motor m
t
= Velocidad angular del motor
mt= Desplazamiento del rotor Jm = Inercia del rotorKi = Constante del par Bm = Coeficiente de friccin viscosaCon referencia al diagrama del circuito de la figura 1.10, el control del motor de cd se
aplica a las terminales de la armadura en la forma del voltaje aplicado eat. Para un anlisis
8/13/2019 CARRO ELECTRICO.pdf
35/90
22
lineal, se supone que el par desarrollado por el motor es proporcional al flujo en el entre
hierro y a la corriente de la armadura [25]. Por lo tanto:
=
(1.1)
Debido a que es constante, la ecuacin (1.1) se escribe como: = i (1.2)
en donde ies la constante del par en N-m/A, Lb pie/A, u oz-plg/A [25].Mediante la ley de voltajes de Kirchhoff, se obtiene la dinmica elctrica del motor
de cd de la figura 1.10.
= 1 1 (1.3)donde la fuerza contraelectromotriz est dada por:
= = (1.4)Por otra parte, a travs de la segunda ley de newton se obtiene la dinmica mecnica
del motor de cd de la figura 1.10.
2
2
=1
1
(1.5)
en donde representa el par de carga del motor, y representa el par elctrico generadopor el circuito de armadura. = (1.6)
8/13/2019 CARRO ELECTRICO.pdf
36/90
23
Las ecuaciones (1.3) a (1.6) consideran a como la seal de entrada del sistema;entonces la ecuacin (1.3) considera que es el efecto inmediato de aplicar voltaje
, entonces en la ecuacin (1.6),
produce el par
, la ecuacin (1.4) define la
fuerza contraelectromotriz, y finalmente, la ecuacin (1.5), el par produce la velocidadangular y el desplazamiento [25].
Las variables de estado del sistema se pueden definir como , y . Alsustituir directamente y al eliminar las variables que no son de estado de las ecuaciones (1.3)
a (1.6), las ecuaciones de estado del sistema de motor de cd escritas en forma matricial son:
=
bb 0Ki
Jm Bm
Jm0
0 1 0
+
10
0
01Jm0
(1.7)
Observe que en este caso, las ecuaciones de estado, se tratan como unasegunda entrada [25].
El diagrama de estado del sistema se muestra en la figura 1.11 empleando la ecuacin
(1.7).
Figura 1.11. Diagrama de estado de un motor de cd.
8/13/2019 CARRO ELECTRICO.pdf
37/90
24
La funcin de transferencia entre el desplazamiento del motor y el voltaje de entrada
se obtiene del diagrama de estado como:
= 3 + + 2 + + (1.8)
en donde se igual a cero.La figura 1.12 muestra la representacin en diagrama de bloques del sistema de un
motor de cd. La ventaja de utilizar el diagrama de bloques es que proporciona una visin
clara de la relacin de funciones de transferencia entre cada bloque del sistema. Ya que se
puede factorizar en el denominador de la ecuacin (1.8), el significado de la funcin de transferencia es que el motor de cd es esencialmente un dispositivo integrador entre estas dos variables.Eso ya se esperaba puesto que, si es una entrada constante, el desplazamiento de salidadel motor ser la salida de un integrador; esto es, se incrementar linealmente con el tiempo
[25].
Figura 1.12. Diagrama a bloques de un sistema de motor de cd.
Aunque un motor de cd es por si mismo un sistema de lazo abierto, el diagrama de
estado de la figura 1.11 y el diagrama a bloques de la figura 1.12 muestran que el motor tiene
interconstruido un lazo retroalimentado provocado por la fuerza contraelectromotriz.
Fsicamente, la fuerza contraelectromotriz representa la realimentacin de la seal que es
proporcional al negativo de la velocidad del motor. Como se observa en la ecuacin (1.7), la
constante de la fuerza contraelectromotriz representa un trmino que se aade a la
8/13/2019 CARRO ELECTRICO.pdf
38/90
25
resistencia y al coheiciente de friccin viscosa . Por lo tanto, la fuerza contraelectromotrizes equivalente a una friccin elctrica que tiende a mejorar la estabilidad del motor, y en general, la
estabilidad del sistema[25].
8/13/2019 CARRO ELECTRICO.pdf
39/90
27
Capitulo 2
Diseo del Sistema
Antes de empezar el diseo de cualquier sistema electrnico, lo primero que se tiene
que hacer es plantear el problema, investigar, determinar y seleccionar los componentes
necesarios para generar un diagrama a bloques general. A continuacin se describen los
requerimientos del sistema, para despus determinar los elementos que lo formarn.
Lo que se requiere es un variador de velocidad y direccin de un motor de CD, que
servir para crear un vehculo elctrico, las variaciones de velocidad resultarn en una
aceleracin y desaceleracin del mismo.
2.1 Caractersticas especficas
El convertidor CD CD clase E, es un sistema electrnico que consta de tres
bloques importantes que son el de etapa lgica, etapa de acoplamiento y etapa de potencia.
Estos se muestran en el diagrama de la figura 2.1.
Figura 2.1. Diagrama a bloques del sistema propulsor.
8/13/2019 CARRO ELECTRICO.pdf
40/90
28
El variador de voltaje proporciona un voltaje entre 0 5 V al sistema de control,
dependiendo del voltaje recibido se generan las seales correspondientes de la etapa lgica.
El banco de bateras es un arreglo de 3 bateras de 12 V colocadas en serie, las cuales
proporcionan 36 V, mismos que son necesarios para alimentar el motor de CD. Debido a la
aplicacin que se desarroll, la corriente necesaria es muy elevada, por tal razn se utilizaron
bateras de aplicacin solar; las cuales son parecidas a las utilizadas en los vehculos de uso
diario, la diferencia es que son de ciclado profundo y estn especialmente diseadas para
soportar un alto nmero de descargas, y pueden ser recargados sin afectar su desempeo, a
diferencia de las bateras automotrices, que al ser sometidos a condiciones de descargas
profundas, pierden ms rpidamente su capacidad [URL 3].
El motor de CD tiene una potencia de 1.5 hp, el voltaje con el que trabaja es de 36 V
y consume una corriente de 35 A. Tericamente estos son los valores a considerar para hacer
el diseo de nuestro sistema electrnico, pero para tener valores reales, la corriente se midi
de forma prctica.
Para medir una corriente elevada se pens en los ampermetros que utilizan los
automviles, puesto que son fciles de conseguir y de un costo muy bajo (figura 2.2); el
problema que surgi al utilizar este tipo de medidor es que no ofrece una lectura exacta de
corriente, y sta era mayor a 60 A, lo que complic an ms la situacin.
Figura 2.2. Medidor de corriente comercial.
8/13/2019 CARRO ELECTRICO.pdf
41/90
29
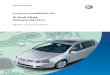
Para poder medir una corriente elevada se utiliz un SHUNT el cual se define
como una carga resistiva a travs de la cual se deriva una corriente elctrica [URL 4], (ver
figura 2.3) la cual tiene una relacin de 50 mV 300 A, es decir, por cada 10 mV se estarn
midiendo 60 A.
Figura 2.3. SHUNT.
La figura 2.4 muestra el diagrama de conexiones y la forma en la que se midi la
corriente consumida por el motor.
Figura 2.4. Diagrama de conexiones para medir la corriente consumida por el sistema electrnico.
Debido a que el motor es de 36 volts, este voltaje se obtiene haciendo un arreglo de 3
bateras de 12 volts en serie, tambin se coloca el SHUNT en serie; para hacer la medicin
de la corriente que consume el sistema, se mide el voltaje con un multmetro.
8/13/2019 CARRO ELECTRICO.pdf
42/90
30
El voltaje medido fue de 34 mV, haciendo una relacin de voltajes y corrientes se
puede notar que la corriente con la que se debe hacer el diseo del sistema es de 204 A, para
no forzar los circuitos se har el diseo de la etapa de potencia para 220 A. Con esto ya se
tienen los parmetros necesarios para iniciar el diseo.
Regresando nuevamente al diagrama a bloques de la figura 2.1 se puede observar que
el sistema de control est constituido por tres bloques importantes los cuales se describen a
continuacin, as como los componentes electrnicos utilizados.
2.2 Requerimientos y especificaciones
El sistema de control transformar un voltaje variable de entrada (0 5V) en un
voltaje variable de salida (0 - 36V) con una corriente mxima de 220 Amperes; el voltaje deentrada ser modificado con un potencimetro. Para controlar la direccin y la velocidad del
motor de CD se implementar un convertidor de CD a CD clase E que manipula tanto las
corrientes como los voltajes de carga.
El sistema de control se realiz a partir de tres bloques importantes que se muestran
en el diagrama de la figura 2.5.
Figura 2.5. Diagrama a bloques del sistema de control del sistema propulsor.
A continuacin se explica el desarrollo de las partes que componen al sistema.
EtapaLgica
Etapa dePotencia
Etapa deacoplamiento
8/13/2019 CARRO ELECTRICO.pdf
43/90
31
2.2.1 Diseo de la etapa lgica
Esta etapa es de suma importancia ya que tiene la funcin de recibir seales de
entrada, interpretarlas y generar seales de salida de control, las cuales ayudaran a manipular
la etapa de potencia y as tener un buen control tanto de la velocidad, como de la direccin
del motor.
Este bloque genera seales de control PWM (Pulse Wide Modulation) que realizan la
activacin y desactivacin de dispositivos semiconductores de potencia y su modulacin
estar en funcin de un voltaje variable de entrada de 0 a 5 V; que viene del variador de
voltaje.
La modulacin de ancho de pulso (PWM) se obtiene al variar el ciclo de trabajo deuna seal peridica, de manera que el tiempo de encendido aumente o disminuya en
proporcin inversa al tiempo de apagado [1]. Matemticamente se expresa as:
TD
funcinladeperiodoT
pulsodelanchopositivaesfuncinlaqueentiempo
trabajodecicloD
La figura 2.6 muestra tres seales de PWM diferentes. La figura 2.6a muestra una
seal de PWM con un ciclo de trabajo del 10%, es decir que la seal est encendido 10% del
periodo y apagado el otro 90%. La figura 2.6b y 2.6c muestran seales de PWM con ciclos
de trabajo del 50% y del 90% respectivamente.
8/13/2019 CARRO ELECTRICO.pdf
44/90
32
Figura 2.6. Seales de PWM con variacin de ciclos de trabajo.
La generacin de seales de PWM se puede hacer a partir de diferentes mtodos, ya
sean de tipo analgico o digital.
Para generar una seal de PWM de forma analgica se pueden utilizar amplificadores
operacionales (figura 2.7) [1]. Pero esta opcin es descartada ya que, como puede observarse,se necesitan varios circuitos integrados para generar una sola seal, en la aplicacin que se
est desarrollando se necesitan 2 seales PWM para poder manipular el convertidor CDCD
clase E (puente H).
Figura 2.7. Seal de PWM generada a partir de amplificadores operacionales.
t
A
0
t
A
0
t
A
0
Ciclo de trabajo
al 10 %
Ciclo de trabajo
al 50 %
Ciclo de trabajo
al 90 %
T
T
T
a)
b)
c)
t
A
0
t
A
0
t
A
0
Ciclo de trabajo
al 10 %
Ciclo de trabajo
al 50 %
Ciclo de trabajo
al 90 %
T
T
T
a)
b)
c)
+3
-2
V+7
V-4
OUT6
OS11
OS25
U1
LM741
+3
-2
V+7
V-4
OUT6
OS1 1
OS25
U2
LM741
+3
-2
V+7
V-4
OUT6
OS1 1
OS25
U3
LM741
R1 1k
R2 1k
R3 10k
R4
1k
R5
22kR6
1kR7 10k
R8
1k
+15V
+15V +15V
-15V
-15V -15V
-5V
Q1 2N5458
Q2
2N5458
C1 1n
+15V
+5V
+15V
Salida de PWM
8/13/2019 CARRO ELECTRICO.pdf
45/90
33
Otra opcin para generar la seal deseada es utilizando un microcontrolador; por las
caractersticas con las que cuenta, ya que adems de que se generan seales de PWM, se
pueden medir corrientes, voltajes, y generar distintas seales.
Las variables de entrada y salida consideradas para este sistema electrnico se
muestran en la figura 2.8 y se explican a continuacin.
Figura 2.8. Seales de entrada y salida del microcontrolador.
A la entrada del microcontrolador se tiene un voltaje variable de 0 a 5 V. Este voltaje
se genera conectando un potencimetro de 15 K a la fuente de alimentacin de 5 V,
dependiendo de su valor se genera el ancho de pulso que sirve para la activacin y
desactivacin de los dispositivos semiconductores de potencia.
Como se mencion en la seccin 2.1, el voltaje generado por el SHUNTtiene una
relacin de voltaje/corriente de 50 mV/ 300 A, por lo tanto, se utiliza para proteccin, esto
es para evitar que los dispositivos semiconductores de potencia sean daados. El voltaje que
se mide en el SHUNTes proporcional a la corriente consumida por el sistema electrnico.
Primero se hace una comparacin de voltajes, esta comparacin funciona como un
limitador de corriente, y con esto se puede saber en qu momento debe de dejar de
funcionar el sistema.
8/13/2019 CARRO ELECTRICO.pdf
46/90
34
Para el cambio de direccin se emplea una seal digital, esta seal solo ser
interpretada como un 1 o un 0 lgico. Cuando se encuentre en 1 lgico el sentido de giro del
motor ser hacia la derecha, y cuando esta seal se encuentre en 0 lgico el sentido de giro
del motor ser hacia la izquierda.
Para tener el control de un convertidor CD CD de clase E se deben controlar 4
interruptores, tal como se observa en la figura 1.8, estos interruptores pueden ser transistores
de alta o de baja potencia, en este caso se utilizarn MOSFETS de potencia, para controlar
los interruptores de la parte alta S1 y S3 se crean las seales de control H1 y H2, y para
controlar los interruptores de la parte baja S2 y S4 se crean las seales de control L1 y L2.
A la salida del microcontrolador existen 5 seales que son H1, H2, L1, L2 y SD, acontinuacin se da una explicacin de su funcin:
H1 y H2 se encargan de la activacin de la parte alta del puente H, as mismo L1 y L2
se encargan de la activacin de la parte baja del puente H, estas 4 seales tienen un control
independiente entre s, pero son dependientes de los valores de los voltajes de entrada ya que
se generan a partir de los valores de voltajes de entrada generados por el potencimetro, del
voltaje que determina el sentido del giro del motor, y del voltaje generado por el SHUNT ya
que si excede el valor de 36 mV el sistema automticamente deja de funcionar para evitar el
dao de los componentes.
La seal SD sirve para la activacin y desactivacin de los controladores que se
utilizan en la etapa de acoplamiento, de esta seal se hablar en la seccin 2.2.2.
Una vez definidas las seales de entrada y de salida, es necesario hacer una correcta
seleccin de componentes electrnicos para realizar el sistema de control.
Lo que se necesita es la interpretacin correcta de las seales de entrada para poder
procesarlas y as obtener las seales control y de PWM a la salida. Se utiliz el microcontrolador
ATmega48V [URL 5], sus caractersticas ms relevantes se listan a continuacin:
Alto rendimiento, Microcontrolador de 8-Bits de baja potencia
8/13/2019 CARRO ELECTRICO.pdf
47/90
35
Segmentos de Alta resistencia de memoria no voltil 4, 8, y 16 Kb de memoria flash auto programable 256/512/512 Bytes de memoria EEPROM
512/1Kb de memoria interna SRAM Retencin de datos: 20 aos a 85C y 100 aos a 25C Caractersticas perifricas
o Seis canales de PWMo Comparador analgico
Caractersticas especialeso Oscilador internoo Fuentes de interrupcin internas y externas
Entradas y salidaso 23 lineas programables de entrada y salida
Voltaje de Operacin:o 1.8 - 5.5V para el ATmega48V/88V/168V
Rango de Temperatura:o -40C to 85C
Velocidad:o ATmega48V/88V/168V: 0 - 4 MHz a 1.8 - 5.5V, 0 - 10 MHz a 2.7 - 5.5V
Bajo consumo de energao Modo activo:
15 A at 32 kHz, 1.8V (incluyendo el oscilador)
Con estas caractersticas es posible satisfacer todos los requerimientos de diseo,
adems de que es un dispositivo econmico y est disponible en el mercado.
Una vez seleccionado el microcontrolador se debe programar, para tal fin se emplea
un diagrama de flujo, en el cual se muestran las diversas tareas que realizar (ver figura 2.9).
8/13/2019 CARRO ELECTRICO.pdf
48/90
36
Figura 2.9. Diagrama de flujo.
A continuacin se indican las tareas a realizar por el microcontrolador:
Primero se configuran las seales de PWM, ADC, los puertos de entrada y salida y elcomparador analgico.
Con el comparador analgico se revisa que no exista una sobre carga de corrientepara evitar el dao de componentes, si existe una sobre carga de corriente,inmediatamente se desactivan todos los circuitos integrados.
Si no existe sobre carga se contina con la lectura del voltaje en el potencimetro,esto es para generar las seales de PWM a cierto ciclo de trabajo con una frecuencia
de 15.7 KHZ, si el voltaje en el potencimetro es muy bajo, no se hace nada, pero si
el voltaje ledo supera el 5% se generan las seales de activacin de los IR2110.
8/13/2019 CARRO ELECTRICO.pdf
49/90
37
Finalmente se revisa en qu sentido se desea que gire el motor.
Con el microcontrolador realizando las tareas deseadas, se agregan dispositivos para
complementar la etapa lgica.
Como ya se mencion, la alimentacin del microcontrolador es de 1.8 V a 5.5 V,
pero la alimentacin general del sistema es de 36 V, por lo tanto se tiene que reducir el
voltaje para evitar el dao de algunos componentes. Tambin es necesario reducir el voltaje a
14 V, ya que algunos dispositivos requieren de este valor de alimentacin. La figura 2.10a
muestra el circuito para convertir de 36 V a 14 V, la figura 2.10b muestra la forma de regular
de 36 V a 5 V, otra opcin para obtener la fuente de 5 V es tomar la alimentacin de 14 V y
reducirla con un regulador LM7805, pero si se hace esto se puede llegar a exigir demasiadacorriente al regulador de 14 V y se toma el riesgo de daarlo.
Figura 2.10. Fuentes de alimentacin.
En la figura 2.11 observamos el diagrama de conexiones del microcontrolador, por
una parte se observa una seal de reinicio (reset) la cual sirve para reiniciar el sistema, por
otro lado est conectado el potencimetro (pedal de aceleracin), que sirve para regular el
ciclo de trabajo de la seal de PWM y de esta forma controlar la velocidad de giro del motor.
a) b)0
C11
1n
C1
1n
U2 LM7805C
1 3
2
IN OUTGND
U1
LM317K3 2
1
IN OUT
ADJ 5 V
C7
1n
R3
240
+ 36 V
C4
1n
C6
1n
D1
Led
14 V
0
C5
1n
R1
240
R2
1k
C9
1n
C10
1n
+ 36 V
C3
1n
C8
1n
C2
1n
8/13/2019 CARRO ELECTRICO.pdf
50/90
38
Figura 2.11. Seales de reinicio y pedal de aceleracin.
La figura 2.12 muestra el interruptor de direccin, que nos indicar el sentido en el
que girar el motor y tambin el interruptor de la alimentacin. Otra parte importante del
sistema es la programacin del microcontrolador, para esto es necesario hacer uso de los
pines MISO, MOSI, y SCK.
Figura 2.12 Interruptor de principal, seal de direccin y pines de programacin.
8/13/2019 CARRO ELECTRICO.pdf
51/90
39
En la figura 2.13 se muestran 2 seales que son de importancia:
Ajuste de corriente es un voltaje de referencia generado externamente con
potencimetros de precisin conectados en serie, los cuales permiten hacer un divisor de
voltaje para tener un voltaje de referencia de comparacin en el pin PD7/AIN1 que es la
entrada negativa del comparador analgico del microcontrolador, con este voltaje de
comparacin se hace una limitacin de corriente en el sistema.
La seal llamada Shuntes el voltaje generado por ste, el cual nos permite determinar
la corriente que est consumiendo el sistema, esta seal es conectada al pin PD7/AIN0 que
es la entrada positiva del comparador analgico del microcontrolador.
Figura 2.13 seales de ajuste de corriente y shunt.
Teniendo completo el diseo de la etapa lgica se hace el diseo para la etapa de
acoplamiento, esto se describe a continuacin.
2.2.2 Diseo de la etapa de acoplamiento
La etapa de acoplamiento tiene como funcin principal proporcionar las seales de
control de PWM acondicionadas al MOSFET, ya que no se pueden conectar directamente elMOSFET y el microcontrolador, debido a que los niveles de corriente y de voltaje que son
necesarios para su activacin son ms elevados de los que puede entregar un dispositivo
digital, en este caso el microcontrolador; es por eso que se utiliz un circuito acoplador que
acondiciona las seales generadas para una correcta activacin de los dispositivos
semiconductores de potencia (figura 2.14).
8/13/2019 CARRO ELECTRICO.pdf
52/90
8/13/2019 CARRO ELECTRICO.pdf
53/90
41
Fuente lgica separada con un rango de 3.3 V a 20 V Tierras lgica y de potencia con un desplazamiento de 5 V Entradas CMOS accionadas en flanco de bajada
Retardo de propagacin para ambos canales Salidas en fase con las entradas
Para el circuito de control se utilizan dos drivers IR2110 ya que solo cuenta con dos
canales. Estos circuitos integrados fueron escogidos porque tienen controladores
independientes en la parte alta y baja que son utilizados para la correcta activacin de los
MOSFETS de potencia que conforman el convertidor CD CD clase E. El diagrama de
conexiones se muestra en la Figura 2.15.
Figura 2.15. Diagrama de conexiones de la etapa de acoplamiento.
Las seales de entrada del IR2110 vienen del microcontrolador del circuito de la
parte lgica que son H1, H2, L1, L2, y se conectan a los pines 10 y 12 de cada circuito
integrado, estos trabajan de forma simultnea, controlando la parte alta y la parte baja del
Puente H como se muestra en la tabla de la figura 1.9b.
14 V
Sd
C29
22u
0
C28
104z
D6
MUR420
R18 47
0
Lout1
H2
R17 47
D8 D1N4148
HO1
0
U4
IR2110
1
2
3
4
5
6
7
14
13
12
11
10
9
8
LO
COM
VCC
NC
VS
VB
HO
NC
VSS
LIN
SD
HIN
VDD
NC
VS2
LO1
R16 47
Hout2
C34
22u
C33
104z
LO2
HO2
0
Lout2
H1
C20
22u
14 V
R19 47
VS1Sd
D2
MUR420 D4 D1N4148
C30
22u
5 V
C32
22u
0
0
C35
22u
D7 D1N4148
U5
IR2110
1
2
3
4
5
6
7
14
13
12
11
10
9
8
LO
COM
VCC
NC
VS
VB
HO
NC
VSS
LIN
SD
HIN
VDD
NC
L1
Hout1
5 V
D5 D1N4148
L2
8/13/2019 CARRO ELECTRICO.pdf
54/90
42
En el arreglo de MOSFETS M1 y M4 mostrado en la figura 2.17 tienen que trabajar
simultneamente, el IR2110 puede proveer una parte alta y una baja para ambos
interruptores y conmutar ambos MOSFETS al mismo tiempo. El IR2110 es alimentado con
+14V DC (a travs del pin 3). Para VDD, el voltaje debe ser menor a 14V as que fue
alimentado con 5V en el pin 9.
Las seales Hout y Lout son las que se encargan de la activacin de los dispositivos
semiconductores de potencia, y la seal SD es la encargada de la activacin del driver.
El IR2110 necesita de un circuito de arranque el cual consiste en el capacitor C30 y
C35, se utilizan diodos de recuperacin rpida MUR420 para minimizar voltajes pico en el
canal de la parte baja, debido a que esta es la nica que tiene referencia a tierra. El canal de laparte alta es flotado ya que no es referenciado. Los capacitores de arranque minimizan la
sobrecarga y los picos de voltaje que puedan existir entre VS y VB (pines 5 y 6
respectivamente), esto se puede observar en la figura 2.15.
Un resistor debe ser puesto en serie con la compuerta del MOSFET para reducir los
rizos de voltaje. Esos rizos de voltaje son causados por capacitancias e inductancias parsitas
de los MOSFETS, que a su vez forman un circuito resonante, el cual es causante de un
voltaje pico, por esta razn es puesto el resistor en serie, para amortiguar los rizos de voltaje
(figura 2.15).
Escoger el valor ideal de un resistor para la compuerta del MOSFET puede ser
difcil. Un resistor con un valor alto puede reducir el rizo de forma considerable, pero la
eficiencia en la conmutacin de la compuerta se reduce. La eficiencia es afectada debido a
que la resistencia causa que el voltaje en la compuerta del MOSFET sea menor. Con un
voltaje pico menor, la eficiencia de conmutacin disminuir.
Para la conmutacin de los MOSFETS, tanto en la parte alta (HO pin7) como en la
parte baja (LO pin1) del IR2110 se han conectado resistencias con un valor de 47 hacia las
compuertas de los MOSFETS, tambin se agregaron diodos en paralelo para eliminar los
picos negativos de voltaje, de este modo, se previenen rizos en la compuerta y se evita que la
8/13/2019 CARRO ELECTRICO.pdf
55/90
43
eficiencia de conmutacin sea afectada. Las seales vistas despus del resistor son llamadas
Hout y Lout y estas son las que se conectan a las terminales de compuerta (gate) de los
MOSFETs (figura 2.15).
VS que es el pin 5 es conectado a la terminal de fuente (source) de los MOSFETS,
as mismo todas las seales acondicionadas (Hout, Lout) van directo a un conector, en el
cual se harn las conexiones con el puente de potencia de manera manual (figura 2.15).
Una vez realizados los diseos de la etapa lgica y de acoplamiento, falta elaborar el
diseo de la etapa de potencia, esta ltima no es menos importante, pero debido a que se
necesita de las dos antes mencionadas se dejo para el final, a continuacin se describe como
se realiz el diseo.
2.2.3 Diseo de la etapa de Potencia
El dispositivo central del sistema son los MOSFETS de potencia, por lo tanto se
utilizarn conocimientos en electrnica de potencia; esta eleccin se hizo debido a los altos
niveles de corriente y voltaje que pueden manejar, adems cuentan con una conmutacin
rpida.
Existen mdulos de MOSFETS los cuales manejan corrientes hasta de 400 Amperes
pero su costo es elevado (aproximadamente 450 dlares), entonces para hacer una reduccin
de costos se hizo un arreglo de MOSFETS (figura 2.16) para que trabajen en paralelo y sean
capaces de controlar una corriente elevada (220 A).
Figura 2.16. Aplicacin de los MOSFET S de potencia.
ArreglodeMOSFETS
Velocidad y direccidel motor variables
Seales dePWM mejoradas
t
15 V
0
8/13/2019 CARRO ELECTRICO.pdf
56/90
8/13/2019 CARRO ELECTRICO.pdf
57/90
45
Capitulo 3
Implementacin del sistema
En este captulo se muestra la implementacin del sistema electrnico, y se explican a
detalle los pasos que se siguieron, desde la programacin del microcontrolador, hasta la
elaboracin de los circuitos impresos.
3.1 Implementacin del sistema digital
Basndose en el diseo del captulo anterior, se conectan los componentes en un
protoboard para hacer las pruebas necesarias de conexin y verificar un buen
funcionamiento.
Una vez ensamblado el sistema, se tiene que hacer la interpretacin del diagrama de
flujo mostrado en la figura 2.9, esto es para la elaboracin del programa que permita el
correcto funcionamiento del microcontrolador; para esto se emplea el software llamado
AVR Studio 4 (figura 3.1), el lenguaje de programacin utilizado es C (anexo 1).
Figura 3.1. Ventana principal del software ARV Studio 4.
8/13/2019 CARRO ELECTRICO.pdf
58/90
46
La programacin del microcontrolador se hace mediante los pines MISO(PD2, pin
5), MOSI(PD3, pin6), SCK(PD4, pin16), RESET(PE0, pin3), VCC(pin8) y GDN(pin9),
estos son los nicos que se necesitan para realizar esta operacin.
En primera instancia, la programacin se prueba en un protoboard independiente de
la etapa de acoplamiento, con la finalidad de evitar posibles daos a los componentes que se
encuentran inhabilitados al momento de conectar la alimentacin del microcontrolador para
su programacin.
Terminada y verificada la etapa lgica, se procede a la implementacin del sistema de
acoplamiento, esto se describe a continuacin.
3.2 Implementacin del sistema de acoplamiento
Para la etapa de acoplamiento se emplea el diagrama esquemtico de la figura 2.15.
Ya con los sistemas conectados y en perfecto funcionamiento se realiza el circuito impreso
para el montaje de los componentes en la placa. El diagrama esquemtico general se observa
en la figura 3.2.
8/13/2019 CARRO ELECTRICO.pdf
59/90
47
Figura 3.2. Diagrama general de conexiones.
8/13/2019 CARRO ELECTRICO.pdf
60/90
49
3.3 Implementacin del sistema de potencia
Para la implementacin de la etapa de potencia se parte de la Figura 2.15, la cual
muestra una conexin de MOSFETS en paralelo, al intentar hacer las conexiones se
encontr con un problema, este es el encapsulado (figura 3.3).
Figura 3.3. Encapsulado del MOSFET IRFPS3810.
Se quiere que la corriente de 220 A se divida en 3 MOSFETS, es decir un promedio
de 73 Amperes por cada uno. Por esta razn se debe colocar un buen disipador de calor para
evitar el calentamiento y el dao de los MOSFETS, as mismo se debe lograr que los pines
compuerta (gate, pin 1), drenaje (drain, pin2), y fuente (source, pin3) se conecten entre s.
Como podemos observar en la figura 3.3, el encapsulado de este MOSFET no tiene
orificio alguno con el cual se pueda sujetar a algn disipador de calor, tampoco se encontr
alguna base que soporte tanta corriente y en la que se puedan hacer las conexiones de los
pines de forma simple.
En total se hara una conexin de 12 MOSFETS y esto involucra un riesgo, ya que si
algn componente no hace bien contacto o tiene una mala conexin se pueden daar, o
incluso por la corriente manejada pueden explotar los dispositivos semiconductores
poniendo en riesgo la integridad de la persona que se encuentra implementando este sistema.
Para evitar ms riesgos se busc otra opcin de MOSFET que tuviera un
encapsulado ms viable para esta aplicacin, el que se eligi fue el STE250NS10 [URL 11] ya
que cuenta con un encapsulado el cual permite que las conexiones al sistema sean ms
fciles, tambin cuenta con caractersticas muy atractivas, las cuales son una baja resistencia
8/13/2019 CARRO ELECTRICO.pdf
61/90
50
de encendido de 4.5 m, soporta un voltaje de 100 V y tiene una alta capacidad de
manipulacin de corriente de hasta 220 A. En la figura 3.4 se muestra el encapsulado y el
diagrama esquemtico interno.
Figura 3.4. Encapsulado y diagrama esquemtico interno del MOSFET STE250NS10.
En el diseo de la etapa de potencia aparece un diodo, este es un diodo interno que
viene integrado con el MOSFET, pero para reforzarlo y evitar problemas se utiliz un diodo
que tiene el mismo encapsulado que el del MOSFET.
El diodo elegido fue el STPS200170TV1 [URL 12], adems del encapsulado se eligi
porque es un diodo doble, que soporta un voltaje de 170 V y trabaja a 100 A, como vienen
dos diodos en este encapsulado con estas caractersticas, si se c