Embed Size (px)
Citation preview
500
Standards
Certification
Education & Training
Publishing
Conferences & Exhibits
INSTRUMENTACIINSTRUMENTACIÓÓN N BBÁÁSICA DE PROCESOS SICA DE PROCESOS INDUSTRIALESINDUSTRIALES
CAPCAPÍÍTULO 8TULO 8
EQUIPOS AUXILIARESEQUIPOS AUXILIARES
M. en C. Armando Morales Sánchez16, 17 y 18 de mayo del 2007
501#
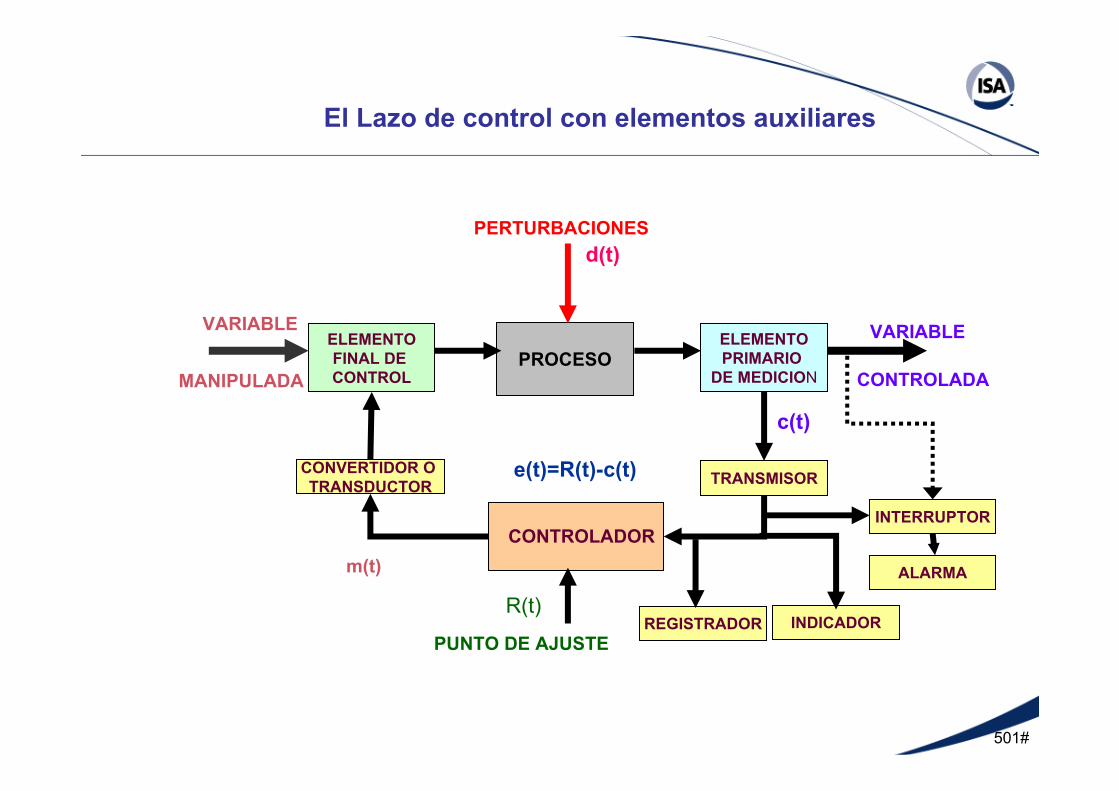
El Lazo de control con elementos auxiliares
ELEMENTOFINAL DE CONTROL
PROCESOELEMENTOPRIMARIO
DE MEDICION
CONVERTIDOR O TRANSDUCTOR TRANSMISOR
PERTURBACIONES
PUNTO DE AJUSTE
VARIABLE
CONTROLADA
VARIABLE
MANIPULADA
CONTROLADORm(t)
c(t)
d(t)
e(t)=R(t)-c(t)
R(t)INDICADORREGISTRADOR
INTERRUPTOR
ALARMA
502#
Transmisores
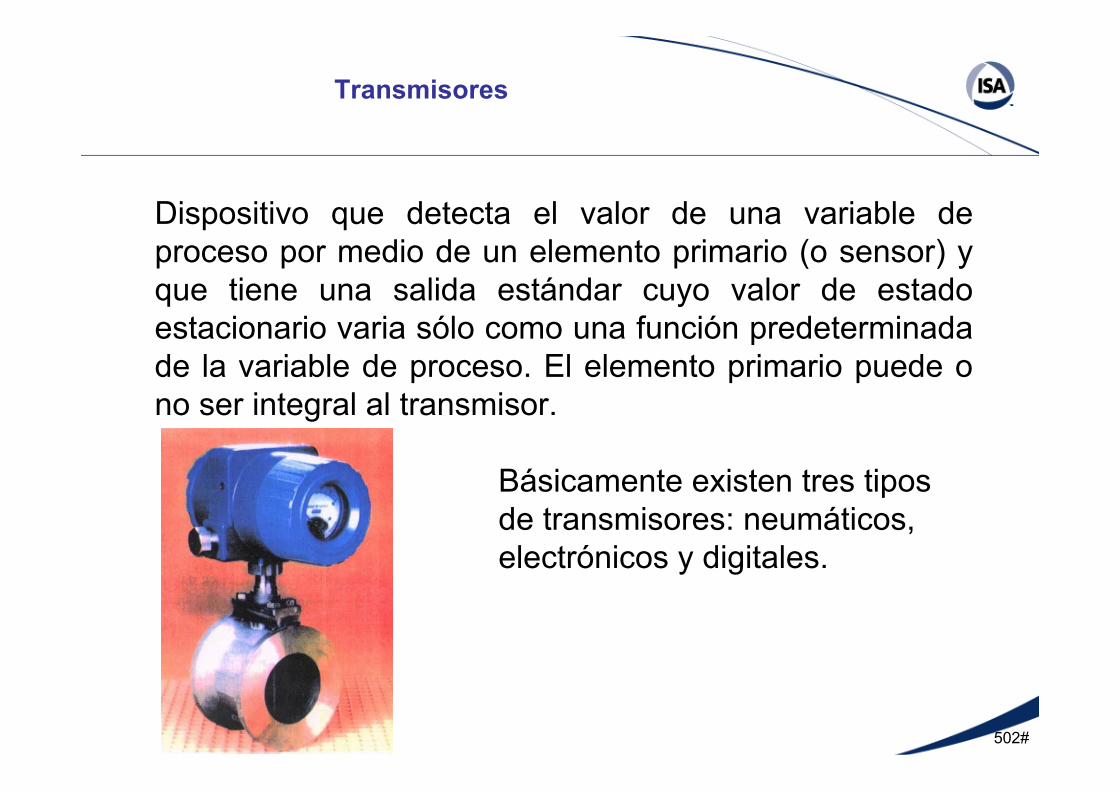
Dispositivo que detecta el valor de una variable de proceso por medio de un elemento primario (o sensor) y que tiene una salida estándar cuyo valor de estado estacionario varia sólo como una función predeterminada de la variable de proceso. El elemento primario puede o no ser integral al transmisor.
Básicamente existen tres tipos de transmisores: neumáticos, electrónicos y digitales.
503#
Transmisores
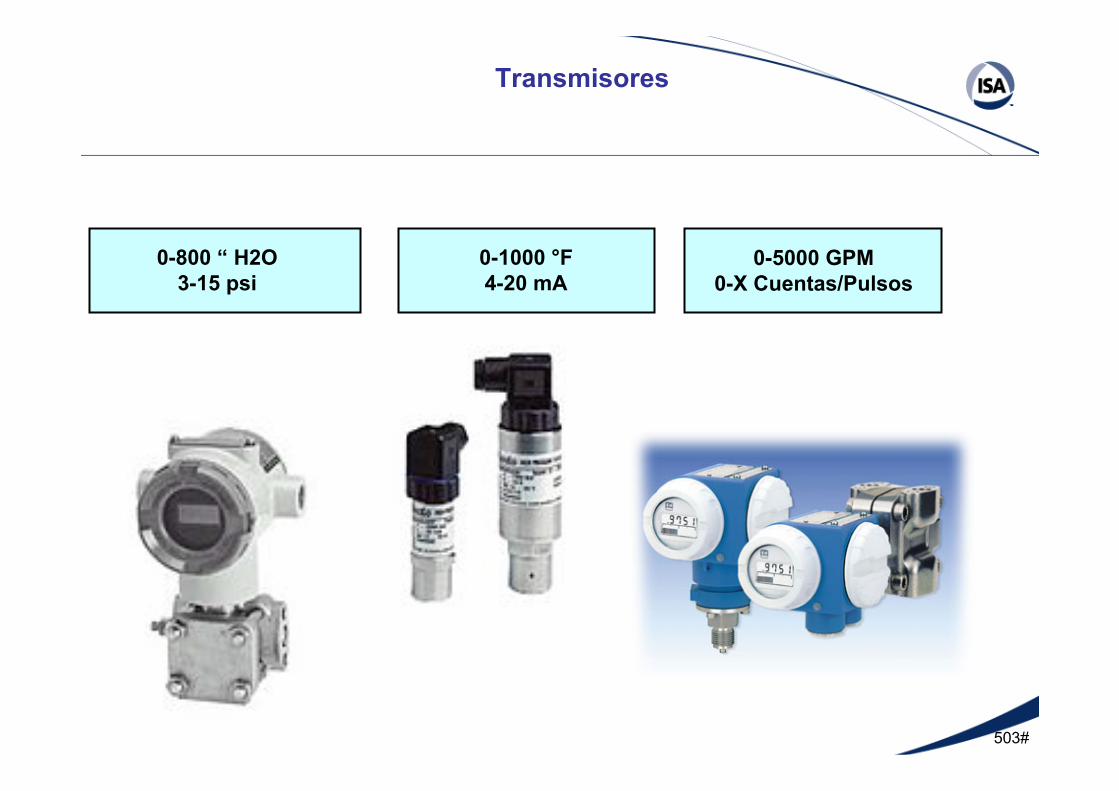
0-800 “ H2O3-15 psi
0-1000 °F4-20 mA
0-5000 GPM0-X Cuentas/Pulsos
504#
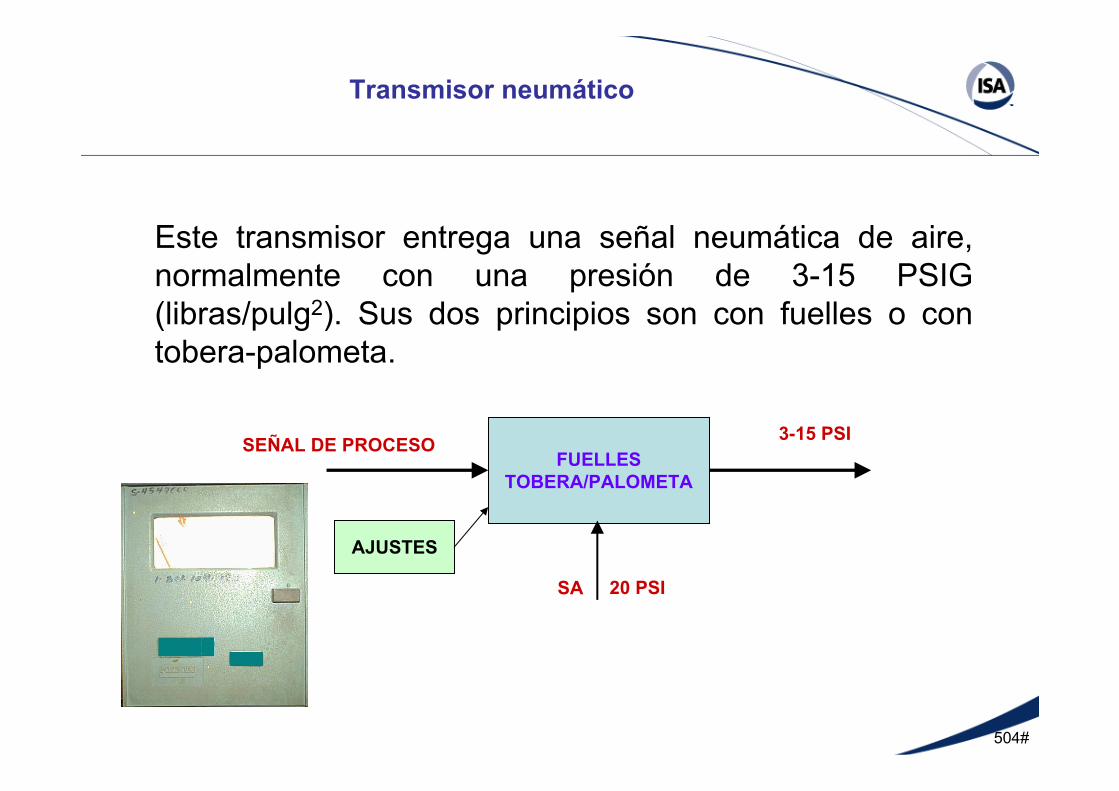
Transmisor neumático
FUELLESTOBERA/PALOMETA
SA
SEÑAL DE PROCESO 3-15 PSI
AJUSTES
Este transmisor entrega una señal neumática de aire, normalmente con una presión de 3-15 PSIG (libras/pulg2). Sus dos principios son con fuelles o con tobera-palometa.
20 PSI
505#
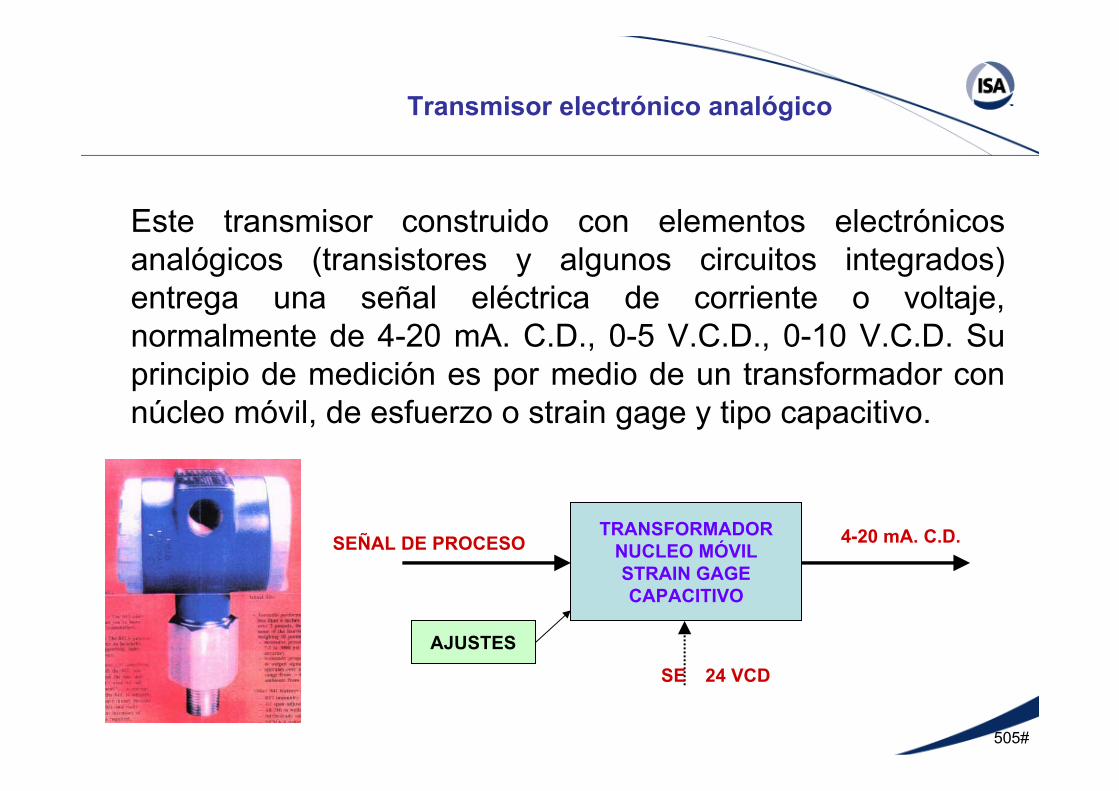
Transmisor electrónico analógico
TRANSFORMADORNUCLEO MÓVILSTRAIN GAGECAPACITIVO
SE
SEÑAL DE PROCESO 4-20 mA. C.D.
AJUSTES
Este transmisor construido con elementos electrónicos analógicos (transistores y algunos circuitos integrados) entrega una señal eléctrica de corriente o voltaje, normalmente de 4-20 mA. C.D., 0-5 V.C.D., 0-10 V.C.D. Su principio de medición es por medio de un transformador con núcleo móvil, de esfuerzo o strain gage y tipo capacitivo.
24 VCD
506#
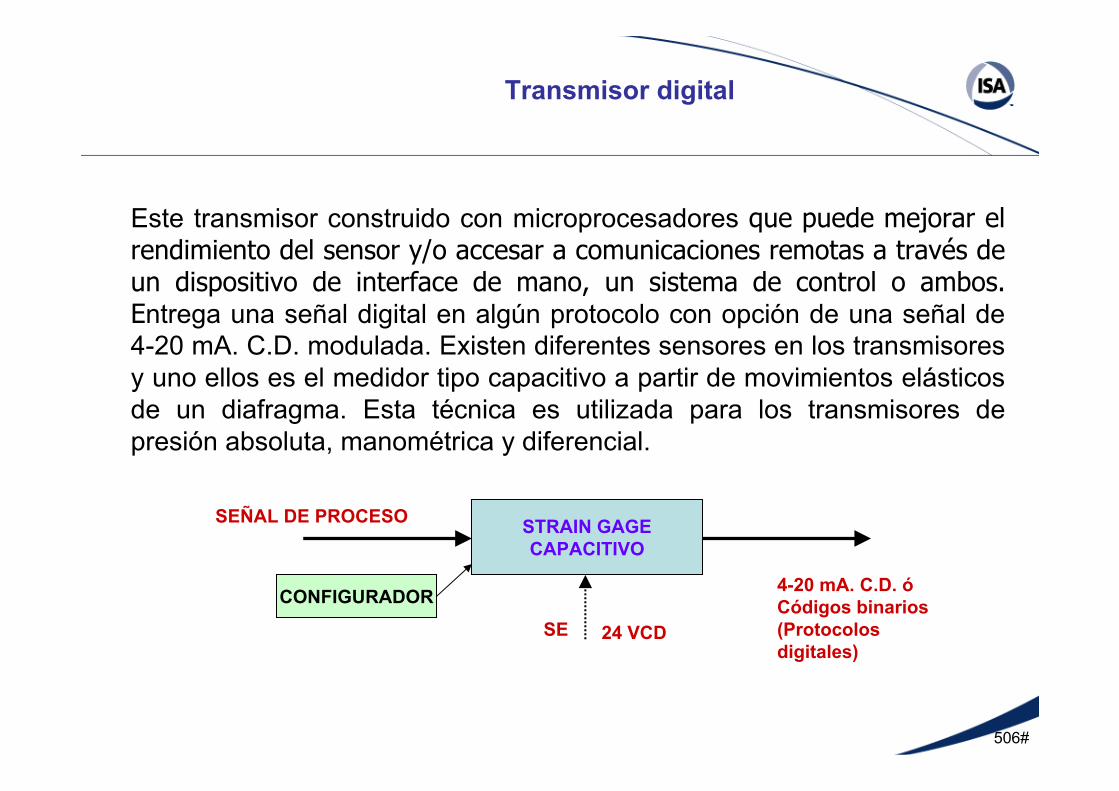
Transmisor digital
STRAIN GAGECAPACITIVO
SE
4-20 mA. C.D. óCódigos binarios (Protocolos digitales)
SEÑAL DE PROCESO
CONFIGURADOR
24 VCD
Este transmisor construido con microprocesadores que puede mejorar el rendimiento del sensor y/o accesar a comunicaciones remotas a través de un dispositivo de interface de mano, un sistema de control o ambos. Entrega una señal digital en algún protocolo con opción de una señal de 4-20 mA. C.D. modulada. Existen diferentes sensores en los transmisores y uno ellos es el medidor tipo capacitivo a partir de movimientos elásticos de un diafragma. Esta técnica es utilizada para los transmisores de presión absoluta, manométrica y diferencial.

507#
Transmisor digital inteligente
El microprocesador mejora el rendimiento del sensor de dos formas:Puede almacenar curvas de entrada/salida para compensar los
errores de salida del sensor originados por factores fuera del procesoPuede llevar a cabo cálculos matemáticos que condicionan la salida
del sensor

508#
Funciones del transmisor digital inteligente
• Auto-diagnósticos
• La compensación del sensor de temperatura proporcionando una linealización mejorada
• Se pueden programar remotamente el cero y el span
• Opciones de salida:
– Lineal
– Raíz cuadrada
– Por ciento
• Capaz de medir más de una variable de proceso (por ejemplo, flujo másico)

509#
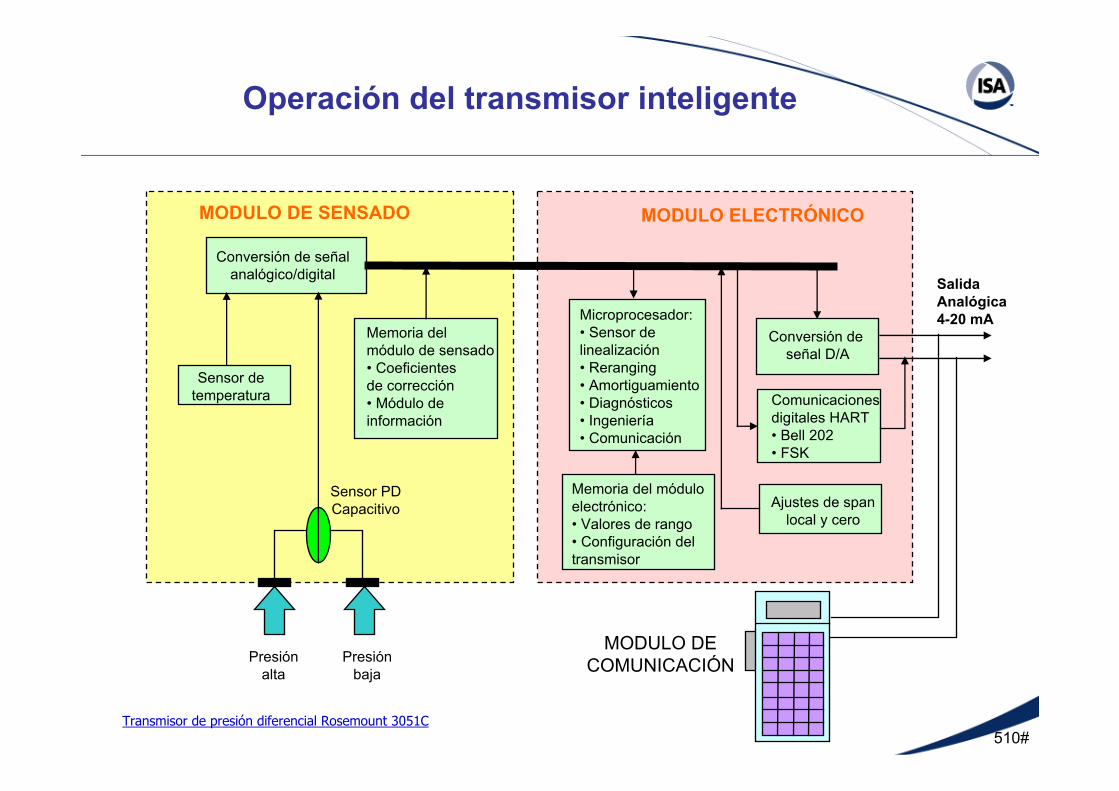
Operación del transmisor inteligente
VARIABLE DE PROCESO
SENSORACONDICIONAMIENTO
DE SEÑALACONDICIONAMIENTO
DE SALIDA
POT DE AJUSTE DE CERO
POT DE AJUSTE DE SPAN
SALIDA 4-20 mA CD
TRANSMISOR ANALÓGICO
VARIABLE DE PROCESO
SENSOR MICROPROCESADOR
MEMORIASALIDA
4-20 mA CD
TRANSMISOR INTELIGENTE
A/D
COMUNICACIONESDIGITALES
D/A
510#
MODULO DECOMUNICACIÓN
MODULO DE SENSADO
Conversión de señalanalógico/digital
Sensor detemperatura
Memoria delmódulo de sensado• Coeficientes de corrección• Módulo de información
Microprocesador:• Sensor de linealización• Reranging• Amortiguamiento• Diagnósticos• Ingeniería• Comunicación
Sensor PDCapacitivo
Presión baja
Presión alta
Memoria del módulo electrónico:• Valores de rango• Configuración del transmisor
Conversión de señal D/A
Comunicacionesdigitales HART• Bell 202• FSK
Salida Analógica4-20 mA
MODULO ELECTRÓNICO
Ajustes de spanlocal y cero
Transmisor de presión diferencial Rosemount 3051C
Operación del transmisor inteligente
511#
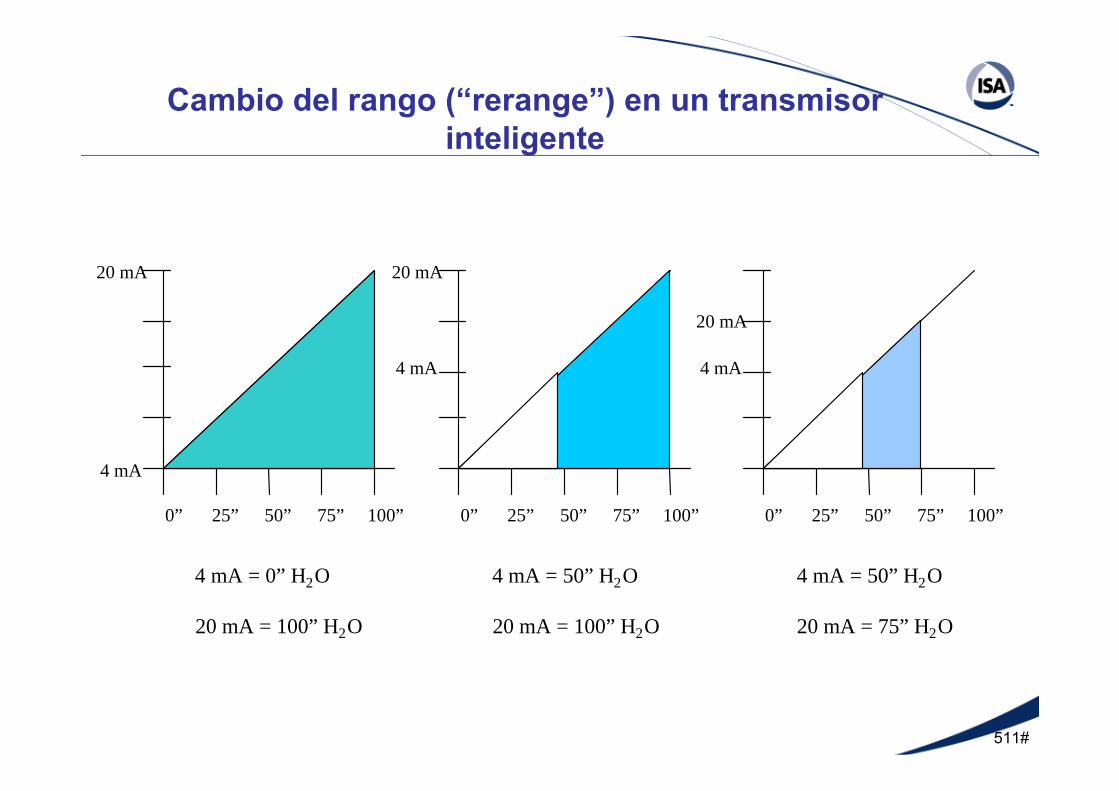
Cambio del rango (“rerange”) en un transmisor inteligente
20 mA
4 mA
0” 25” 50” 75” 100”
20 mA
4 mA
0” 25” 50” 75” 100”
4 mA
0” 25” 50” 75” 100”
20 mA
4 mA = 0” H2O
20 mA = 100” H2O
4 mA = 50” H2O
20 mA = 100” H2O
4 mA = 50” H2O
20 mA = 75” H2O
512#
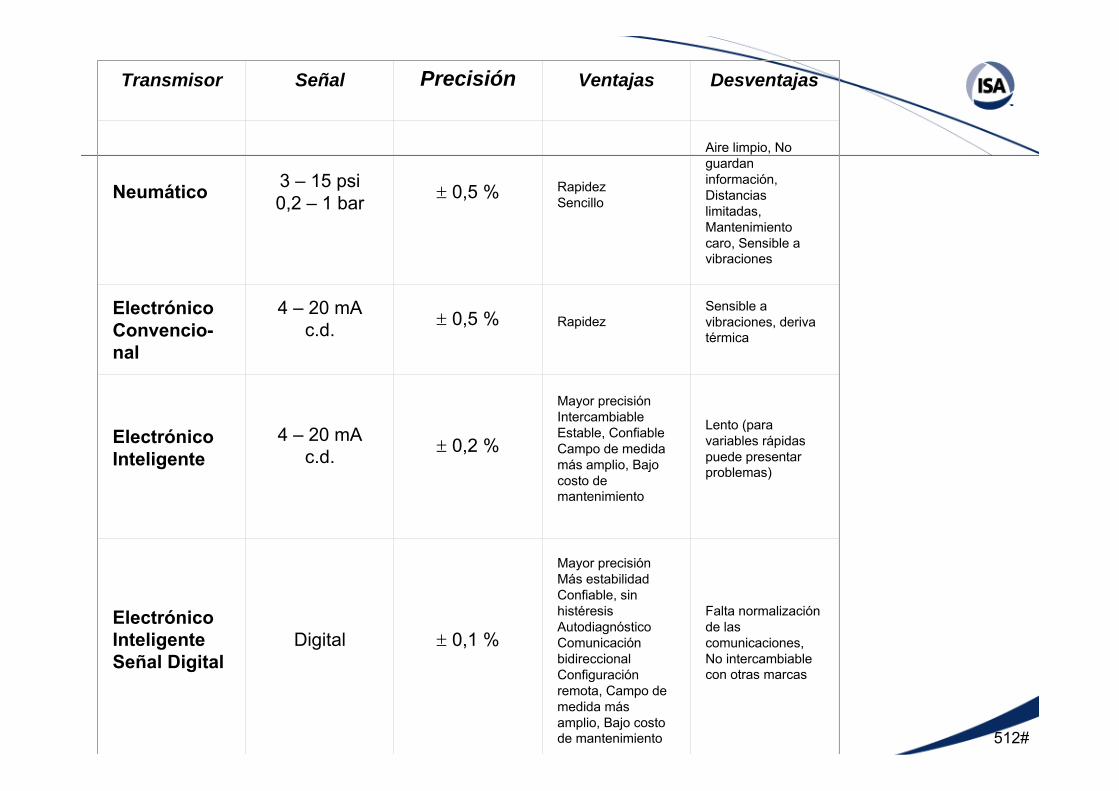
Transmisor Señal Precisión Ventajas Desventajas
Neumático 3 – 15 psi0,2 – 1 bar ± 0,5 % Rapidez
Sencillo
Aire limpio, No guardan información, Distancias limitadas, Mantenimiento caro, Sensible a vibraciones
Electrónico Convencio-nal
4 – 20 mA c.d. ± 0,5 % Rapidez
Sensible a vibraciones, deriva térmica
ElectrónicoInteligente
4 – 20 mA c.d. ± 0,2 %
Mayor precisión Intercambiable Estable, Confiable Campo de medida más amplio, Bajo costo de mantenimiento
Lento (para variables rápidas puede presentar problemas)
Electrónico Inteligente Señal Digital
Digital ± 0,1 %
Mayor precisión Más estabilidad Confiable, sin histéresis Autodiagnóstico Comunicación bidireccionalConfiguración remota, Campo de medida más amplio, Bajo costo de mantenimiento
Falta normalización de las comunicaciones, No intercambiable con otras marcas
513#
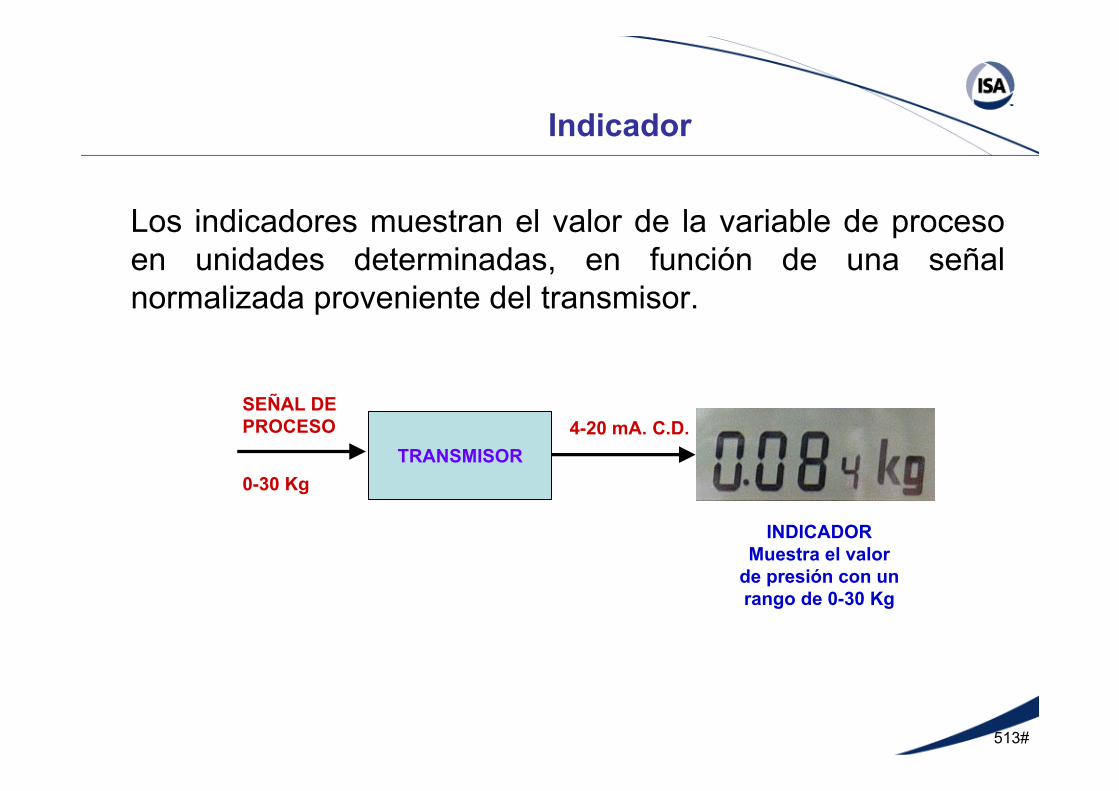
Indicador
Los indicadores muestran el valor de la variable de proceso en unidades determinadas, en función de una señal normalizada proveniente del transmisor.
TRANSMISOR
SEÑAL DE PROCESO 4-20 mA. C.D.
0-30 Kg
INDICADORMuestra el valor
de presión con un rango de 0-30 Kg
514#
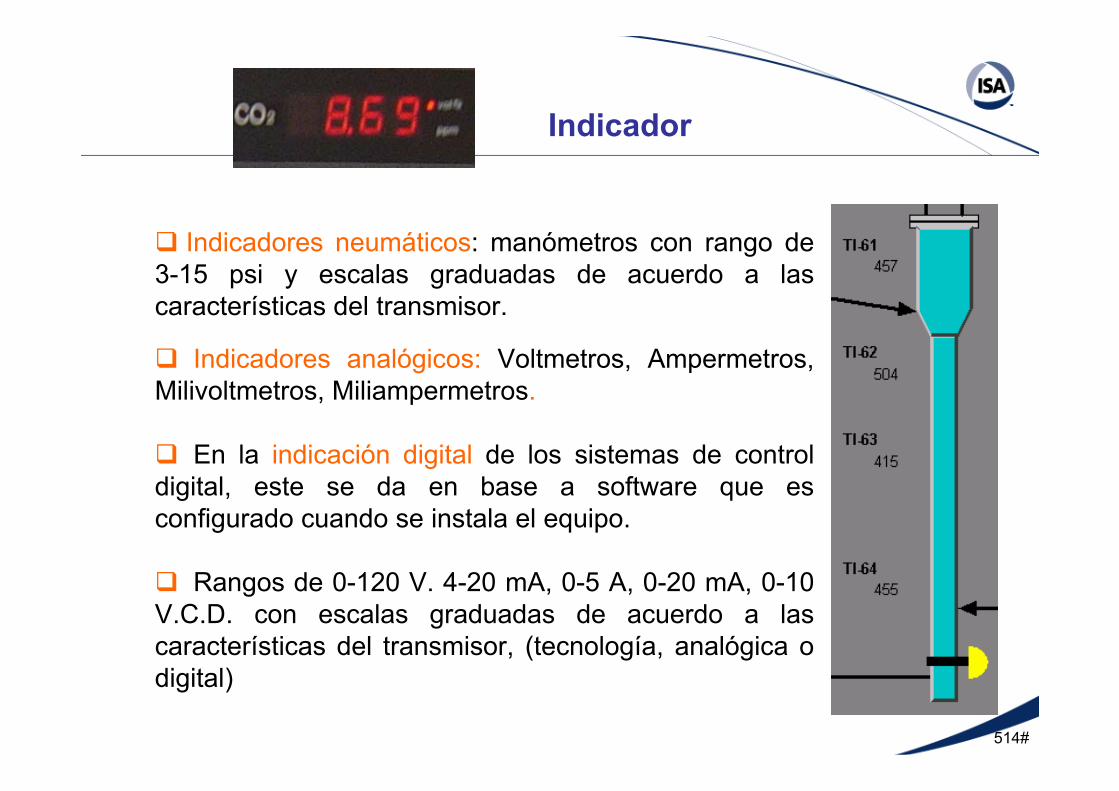
Indicador
Indicadores neumáticos: manómetros con rango de 3-15 psi y escalas graduadas de acuerdo a las características del transmisor.
Indicadores analógicos: Voltmetros, Ampermetros, Milivoltmetros, Miliampermetros.
En la indicación digital de los sistemas de control digital, este se da en base a software que es configurado cuando se instala el equipo.
Rangos de 0-120 V. 4-20 mA, 0-5 A, 0-20 mA, 0-10 V.C.D. con escalas graduadas de acuerdo a las características del transmisor, (tecnología, analógica o digital)
515#
Registrador
Es un instrumento que indica la tendencia gráfica de las variables de proceso.
En el caso de los registradores neumáticos se utilizan las gráficas graduadas de acuerdo al rango del transmisor, son del tipo circular o rollo de papel con registros múltiples. Existen registradores electrónicos que funcionan de la misma manera con rollos de papel.
En los sistemas de control digital, en el software se configuran las tendencias en rango y tiempo, e inclusive generan una base de datos histórica de los datos registrados.

516#
Registrador
517#
Convertidor
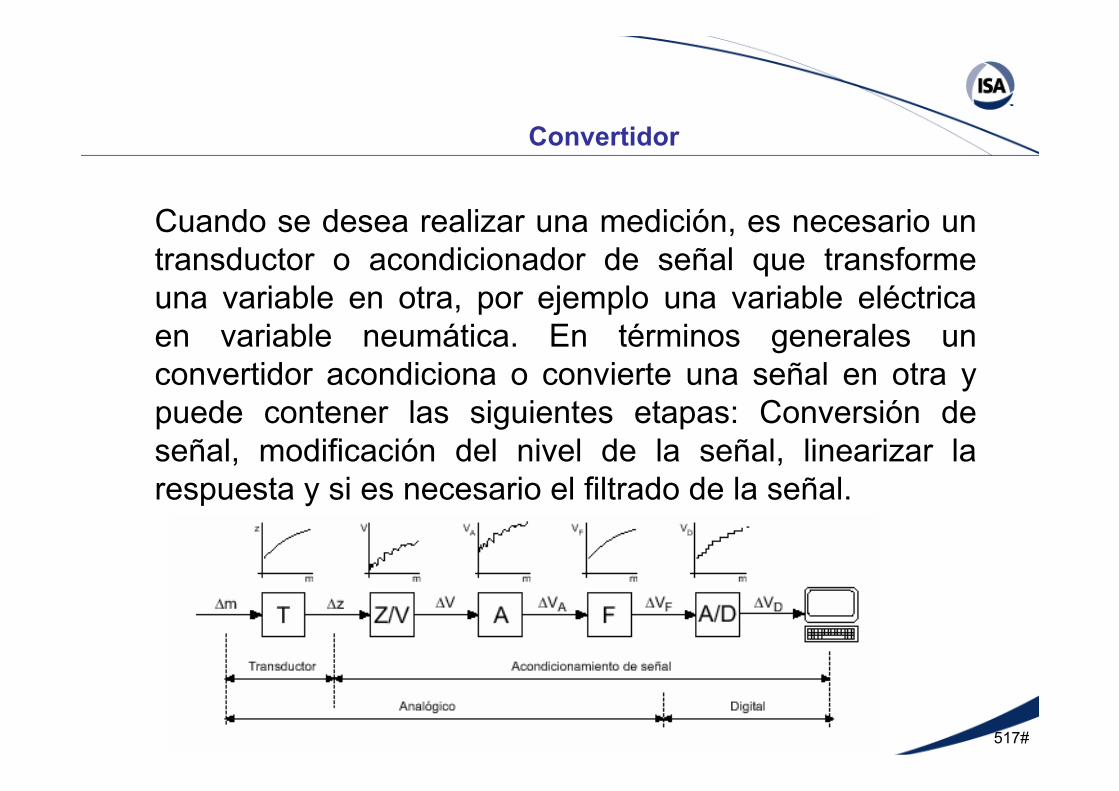
Cuando se desea realizar una medición, es necesario un transductor o acondicionador de señal que transforme una variable en otra, por ejemplo una variable eléctrica en variable neumática. En términos generales un convertidor acondiciona o convierte una señal en otra y puede contener las siguientes etapas: Conversión de señal, modificación del nivel de la señal, linearizar la respuesta y si es necesario el filtrado de la señal.
518#
Tipos de convertidores
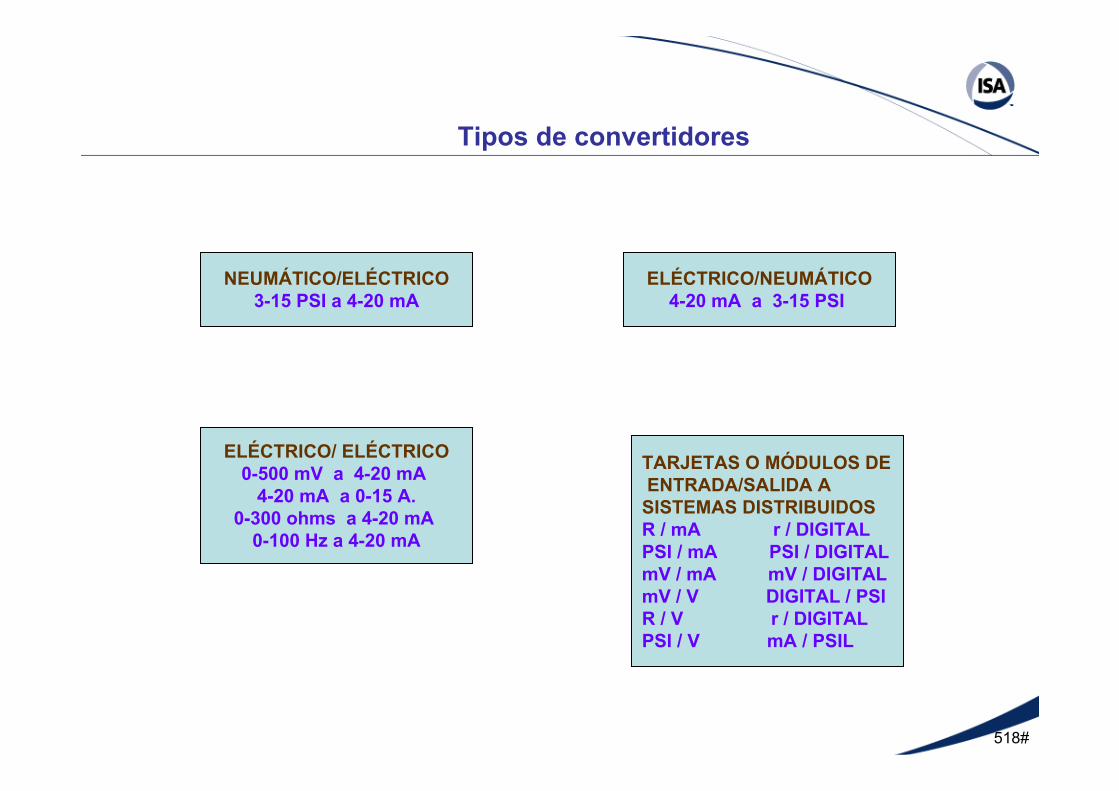
NEUMÁTICO/ELÉCTRICO3-15 PSI a 4-20 mA
ELÉCTRICO/NEUMÁTICO4-20 mA a 3-15 PSI
ELÉCTRICO/ ELÉCTRICO0-500 mV a 4-20 mA
4-20 mA a 0-15 A.0-300 ohms a 4-20 mA
0-100 Hz a 4-20 mA
TARJETAS O MÓDULOS DEENTRADA/SALIDA A
SISTEMAS DISTRIBUIDOSR / mA r / DIGITAL PSI / mA PSI / DIGITALmV / mA mV / DIGITAL mV / V DIGITAL / PSIR / V r / DIGITAL PSI / V mA / PSIL
519#
Convertidor electroneumático (4-20 mA. CD a 3-15 PSIG)
520#
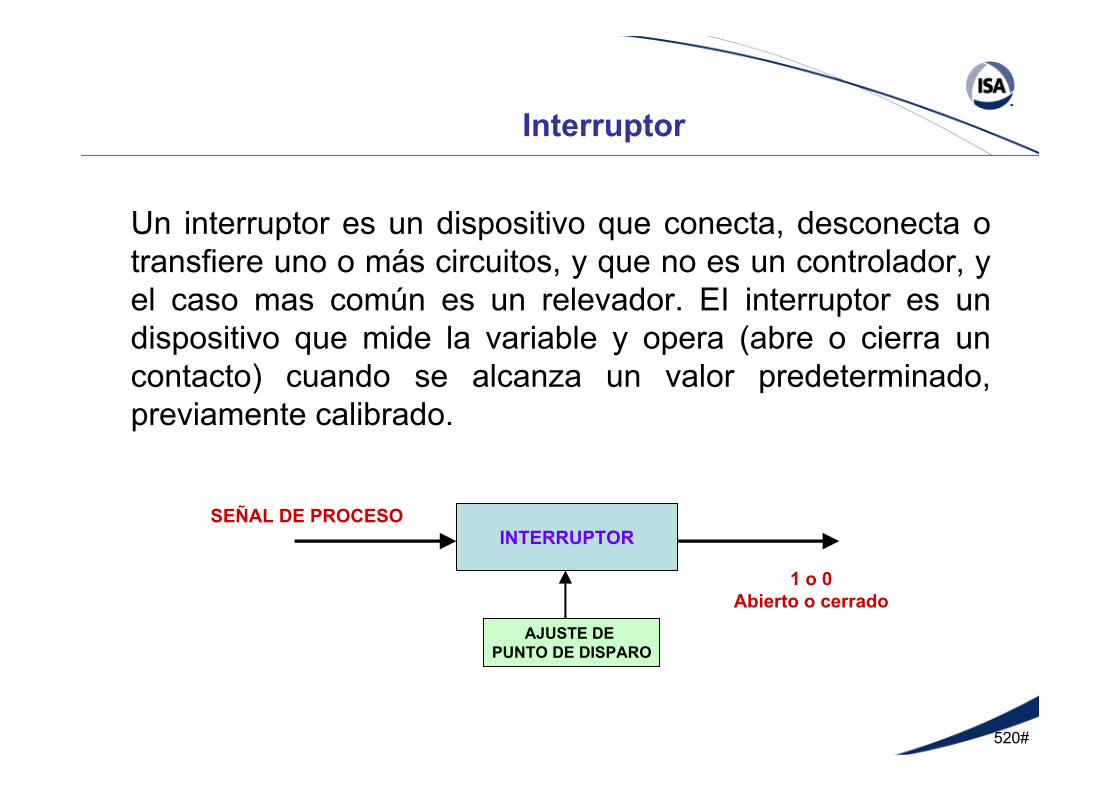
Interruptor
Un interruptor es un dispositivo que conecta, desconecta o transfiere uno o más circuitos, y que no es un controlador, y el caso mas común es un relevador. EI interruptor es un dispositivo que mide la variable y opera (abre o cierra un contacto) cuando se alcanza un valor predeterminado, previamente calibrado.
INTERRUPTORSEÑAL DE PROCESO
1 o 0Abierto o cerrado
AJUSTE DE PUNTO DE DISPARO
521#
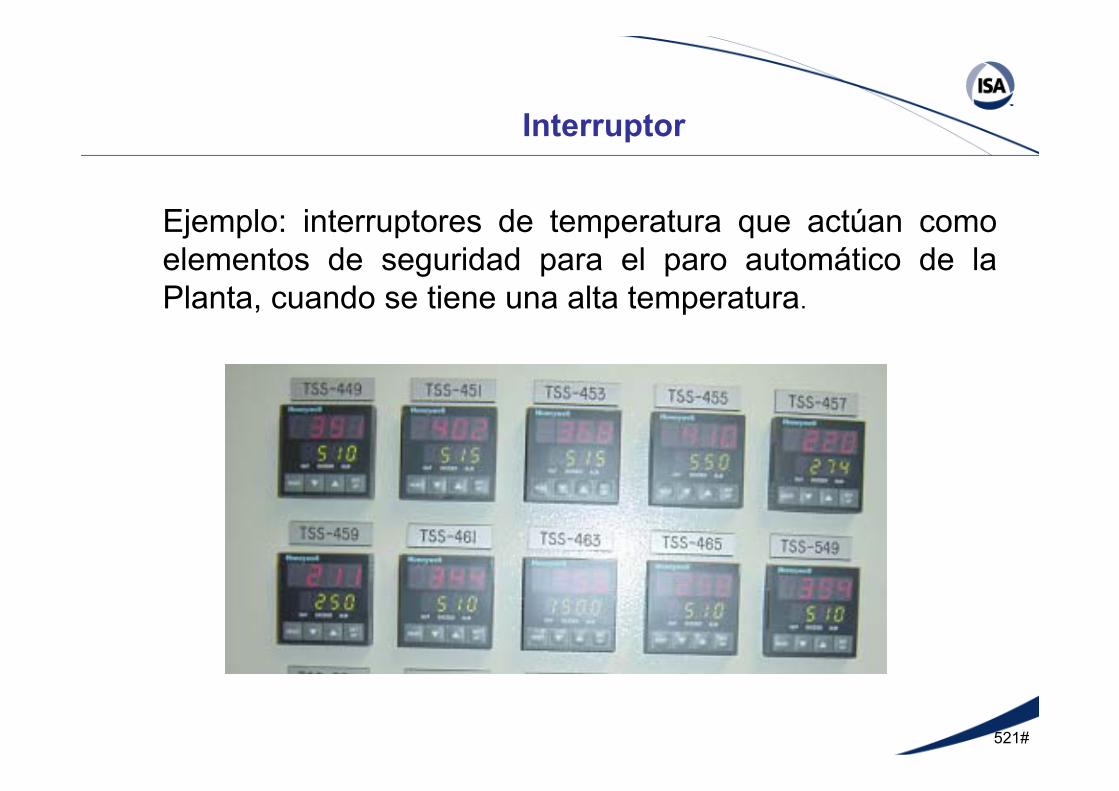
Interruptor
Ejemplo: interruptores de temperatura que actúan como elementos de seguridad para el paro automático de la Planta, cuando se tiene una alta temperatura.
522#
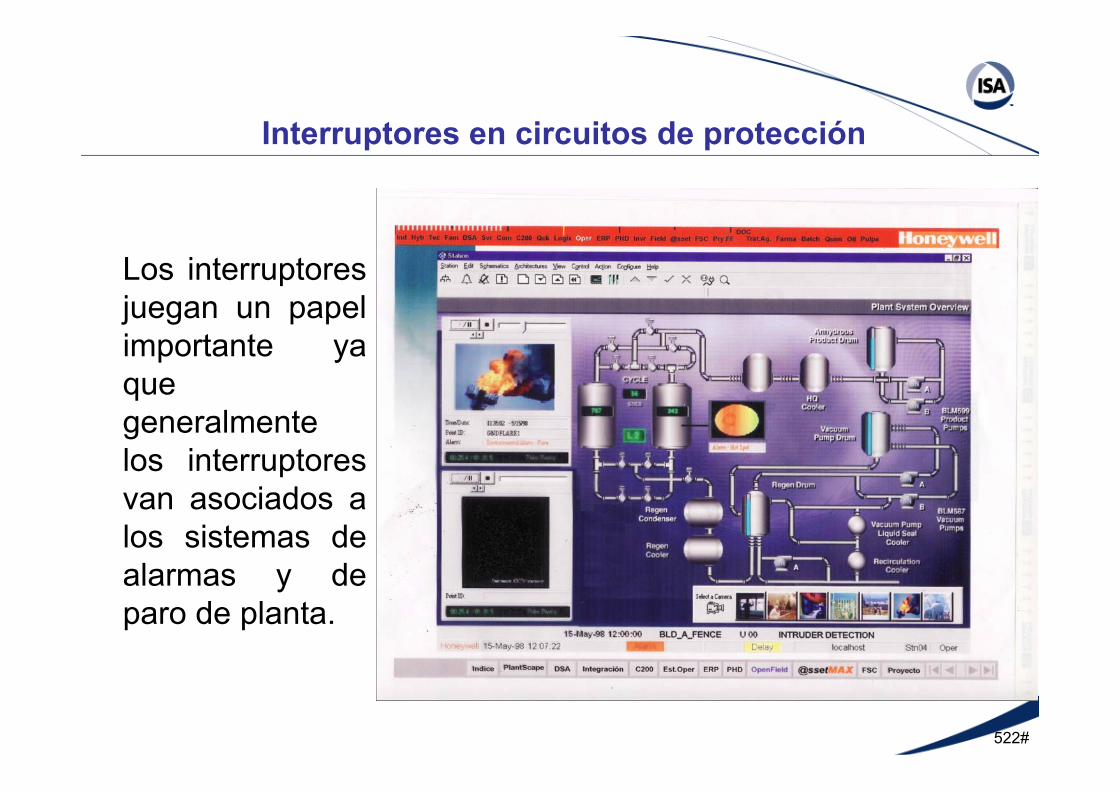
Interruptores en circuitos de protección
Los interruptores juegan un papel importante ya que generalmente los interruptores van asociados a los sistemas de alarmas y de paro de planta.
523#
Alarmas
• Es una función de la interfase de operador quepermite detectar y reportaranormalidades en el proceso
• Estas pueden ser visualesy/o audibles
Tan solo avisandole al operador...
524#
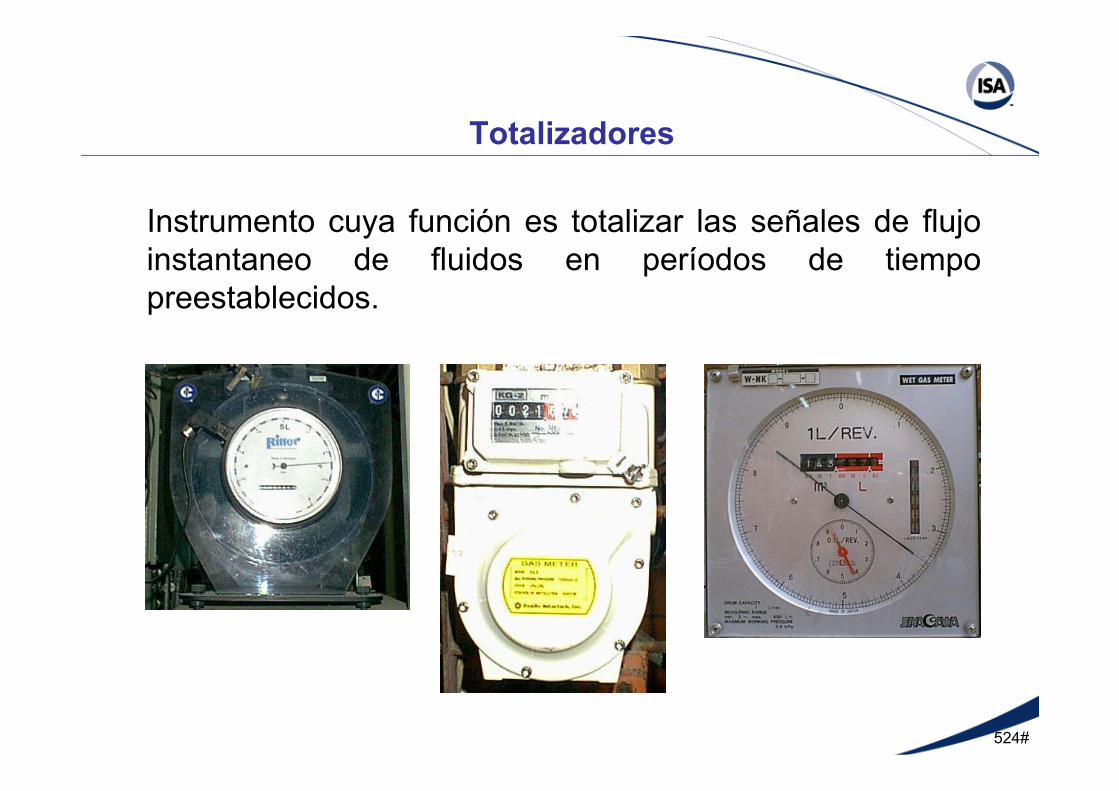
Totalizadores
Instrumento cuya función es totalizar las señales de flujo instantaneo de fluidos en períodos de tiempo preestablecidos.
525#
Buses de campo
Un bus de campo es un término genérico que describe un conjunto de redes de comunicación para uso industrial cuyo objetivo es sustituir las conexiones punto a punto entre los elementos de campo y el sistema de control a través del tradicional lazo de 4-20 mA.
El objetivo es reemplazar los sistemas de control centralizados por redes para control distribuidos con el fin de mejorar la calidad del producto, reducir costos y mejorar la eficiencia del sistema.
526#
Buses de campo
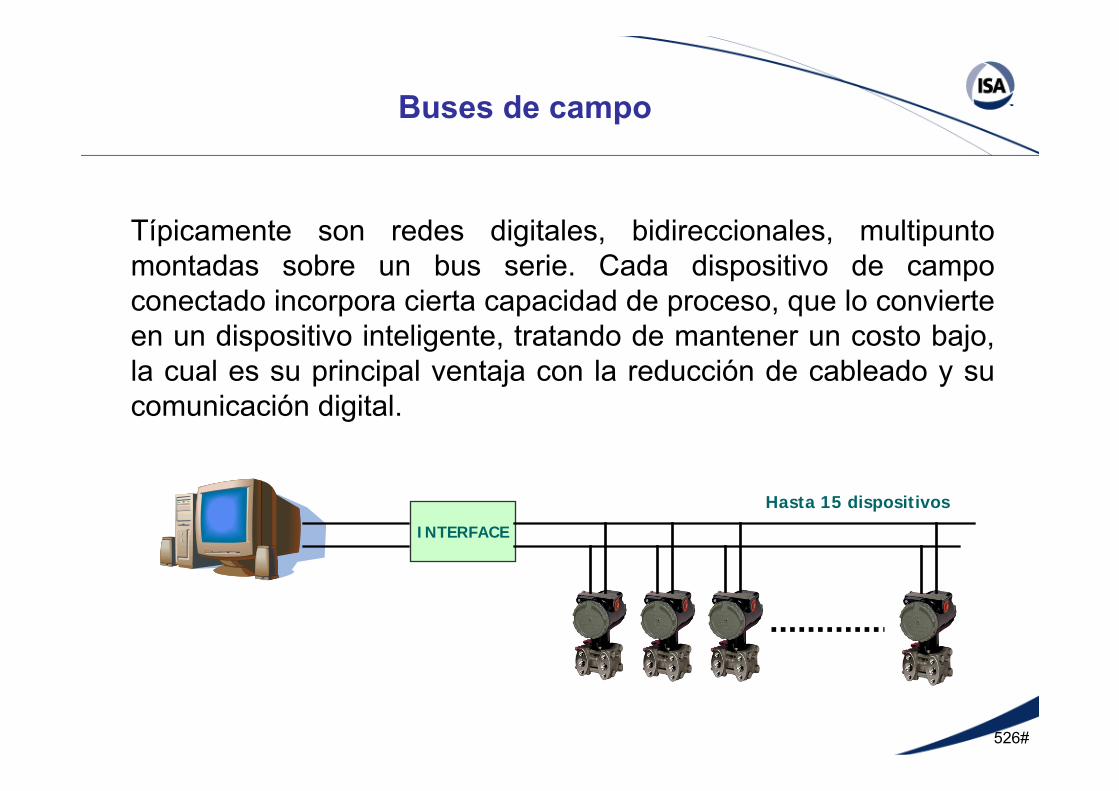
Típicamente son redes digitales, bidireccionales, multipunto montadas sobre un bus serie. Cada dispositivo de campo conectado incorpora cierta capacidad de proceso, que lo convierte en un dispositivo inteligente, tratando de mantener un costo bajo, la cual es su principal ventaja con la reducción de cableado y su comunicación digital.
INTERFACE
Hasta 15 dispositivos

527#
Buses de campo
Cada uno de estos elementos es capaz de ejecutar funciones simples de autodiagnóstico, control o mantenimiento, así como comunicarse bidireccionalmente a través del bus.
La señal aloja tanto a la variable de medición y a la señal de control además de que puede proporcionar información adicional, como por ejemplo:
- Mediciones secundarias- Parámetros de Proceso - Configuración del Dispositivo- Calibración - Diagnósticos- Identificación o Tag
528#
Buses de campo
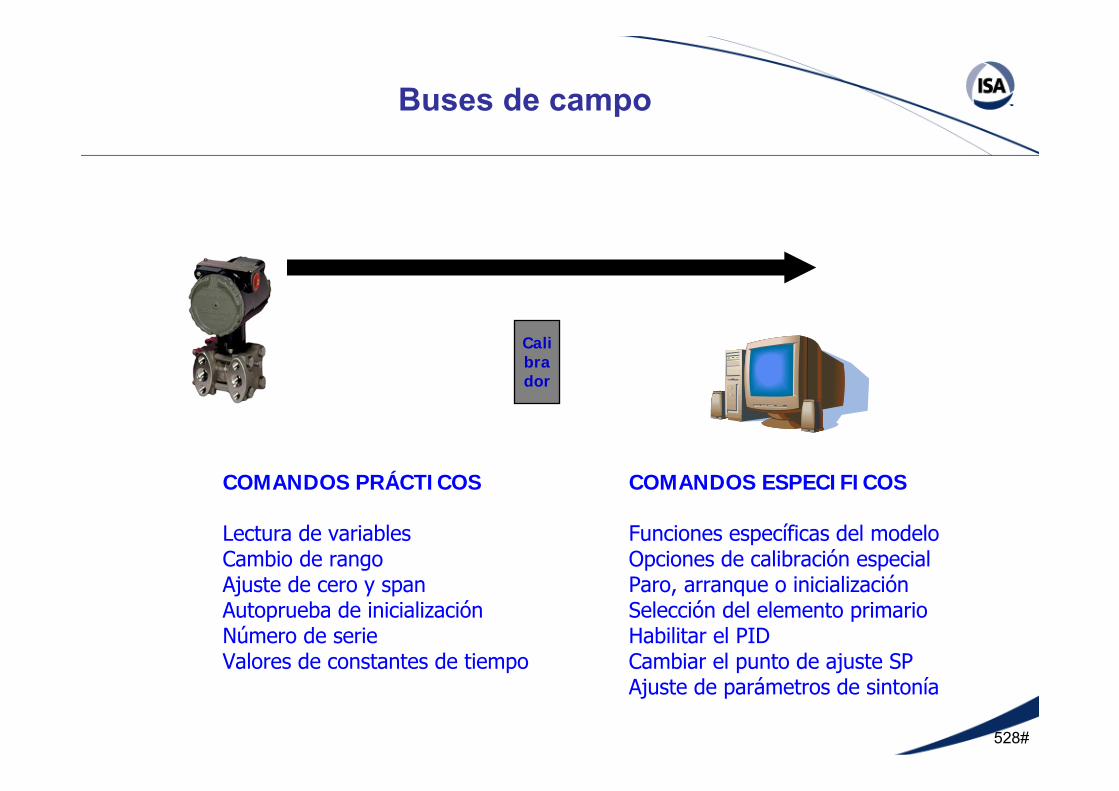
COMANDOS PRÁCTICOS
Lectura de variablesCambio de rangoAjuste de cero y spanAutoprueba de inicializaciónNúmero de serieValores de constantes de tiempo
COMANDOS ESPECIFICOS
Funciones específicas del modeloOpciones de calibración especialParo, arranque o inicializaciónSelección del elemento primarioHabilitar el PIDCambiar el punto de ajuste SPAjuste de parámetros de sintonía
Calibrador
529#
Tipos de buses de campo
Debido a la falta de normas, algunas compañías han desarrollado soluciones y cada una de ellas con diferentes características.
Se pueden dividir en los siguientes grupos:
a) Buses de alta velocidad y baja funcionalidad.b) Buses de alta velocidad y funcionalidad media.c) Buses de altas características.
530#
Buses de altas velocidad y baja funcionalidad
Están diseñados para integrar dispositivos simples como finales de carrera, fotoceldas, relevadores y actuadores simples, funcionando en tiempo real y agrupados en una pequeña zona de la planta, típicamente en una PC. Algunos ejemplos son:
CAN: Diseñado originalmente para aplicación en vehículos.
SDS: Bus para la integración de sensores y actuadores basado en CAN.
ASI: Bus serie diseñado por Siemens para la integración de sensores y actuadores.
531#
Buses de alta velocidad y funcionalidad media
Se basan en el diseño de una capa de enlace para el envío eficiente de bloques de datos de tamaño medio, permitiendo al dispositivo mayor funcionalidad incluyendo aspectos de configuración, calibración o programación del dispositivo. Algunos ejemplos son:
DeviceNet: utiliza como base el bus CAN con una capa de aplicación orientada a objetos (Allen-Bradley).
LONWorks: Red desarrollada por Echelon.BitBus: Red desarrollada por Intel.DIN MessBus: Norma alemana de bus de instrumentación basado
en comunicación RS-232.BitBus: Norma alemana de bus usado en aplicaciones
medias.
532#
Buses de altas características
Son capaces de soportar comunicaciones a nivel planta industrial. Aunque se basan en buses de alta velocidad, algunas presentan problemas debido a la sobrecarga excesiva para alcanzar las características funcionales y de seguridad que les exigen. Algunos ejemplos son:
- Profibus
- FIP
- Fieldbus Foundation
533#
Protocolo Hart
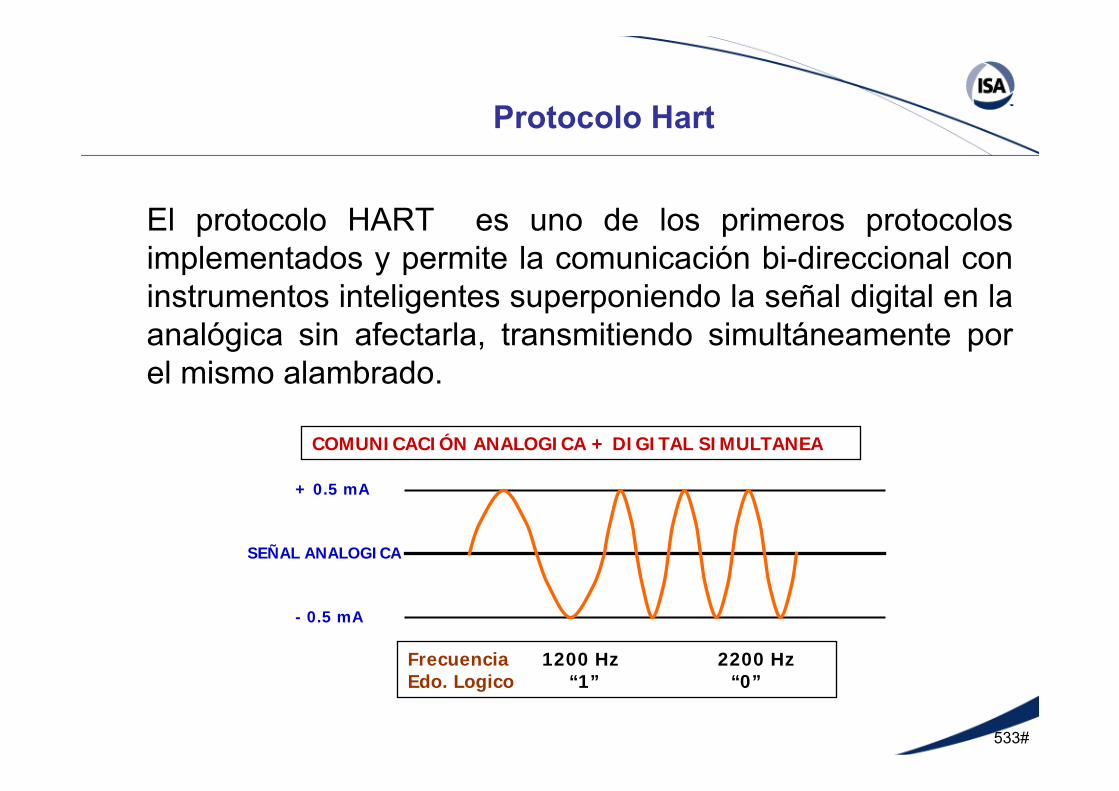
El protocolo HART es uno de los primeros protocolos implementados y permite la comunicación bi-direccional con instrumentos inteligentes superponiendo la señal digital en la analógica sin afectarla, transmitiendo simultáneamente por el mismo alambrado.
SEÑAL ANALOGICA
+ 0.5 mA
- 0.5 mA
Frecuencia 1200 Hz 2200 HzEdo. Logico “1” “0”
COMUNICACIÓN ANALOGICA + DIGITAL SIMULTANEA
534#
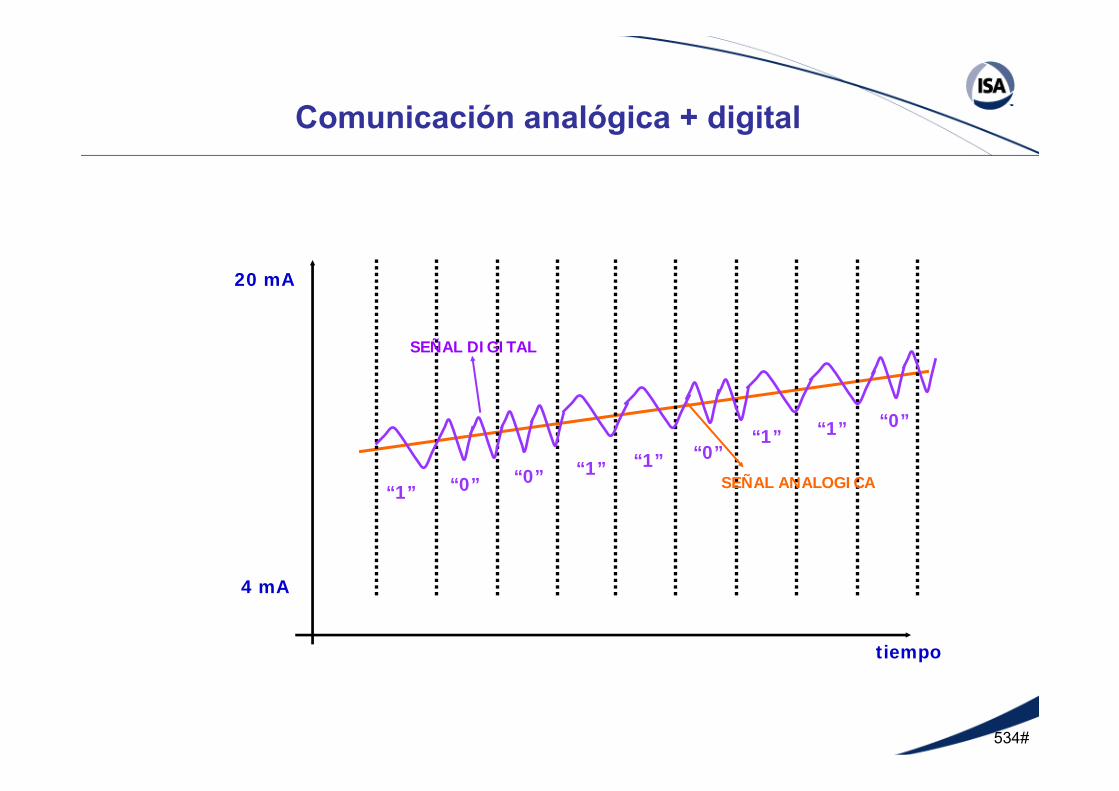
Comunicación analógica + digital
SEÑAL ANALOGICA
20 mA
4 mA
SEÑAL DIGITAL
tiempo
“1”“1” “1”
“1” “1”
“0” “0”“0”
“0”
535#
Protocolo HART (Highway Addressable Remote Transducer)
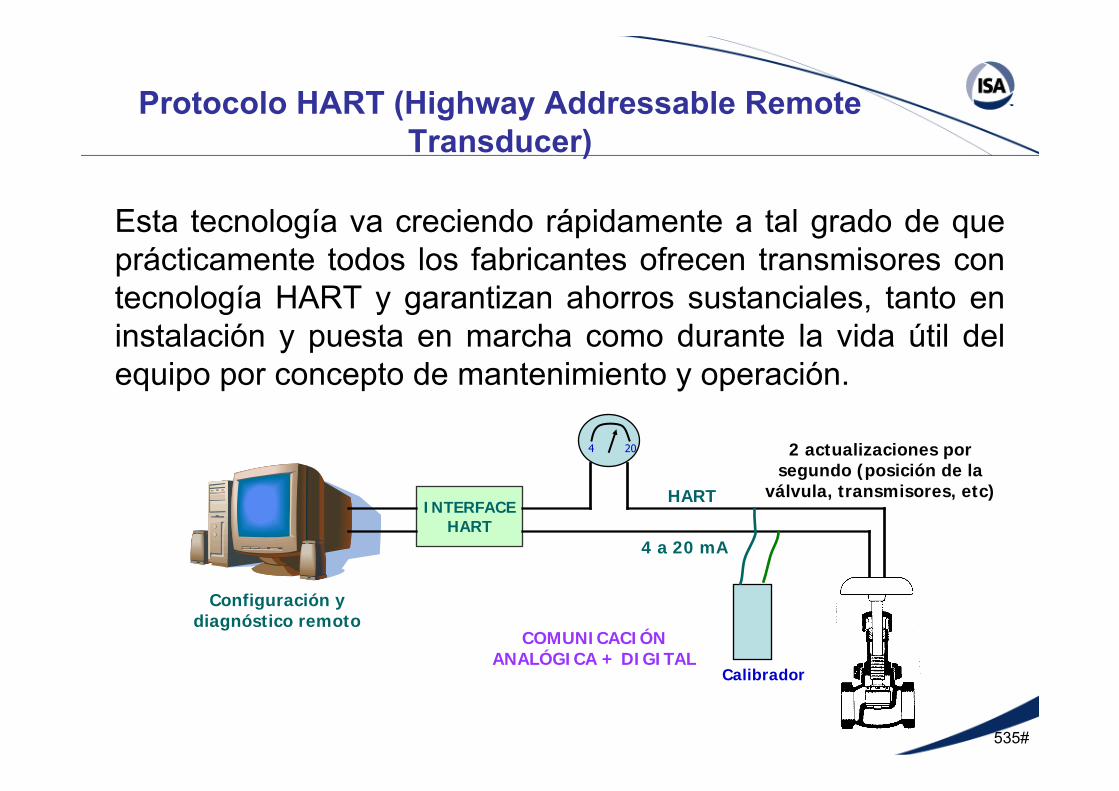
Esta tecnología va creciendo rápidamente a tal grado de que prácticamente todos los fabricantes ofrecen transmisores con tecnología HART y garantizan ahorros sustanciales, tanto en instalación y puesta en marcha como durante la vida útil del equipo por concepto de mantenimiento y operación.
INTERFACEHART
Configuración y diagnóstico remoto
4 20
COMUNICACIÓN ANALÓGICA + DIGITAL
4 a 20 mA
HART
2 actualizaciones por segundo (posición de la
válvula, transmisores, etc)
Calibrador
536#
Transmisor como controlador
El transmisor HART tiene internamente una opción de actuar como controlador. El dispositivo se configura de tal manera que el lazo de 4-20 mA es proporcional a la salida del algoritmo de control PID para mandar una señal sobre la válvula de control.
537#
Bus de campo Modbus
Modbus (1979) es un protocolo que trabaja en la capa de aplicación nivel 7 del modelo OSI que proporciona comunicación cliente servidor entre dispositivos conectados en diferentes tipos de buses o redes.
Modbus es un protocolo de petición/respuesta y comúnmente se utiliza en:
- TCP/IP sobre Ethernet. Internet puede accesar Modbus en un puerto de sistema reservado 502 en el stack o pila TCP/IP.
- Transmisión asíncrona serie sobre una amplia variedad de medios(EIT/TIA-232-E, EIA-422, EIA/TIA-485-A, fibra óptica, radio, etc).
- Modbus plus, una red token passing de alta velocidad.
538#
Bus de campo Modbus
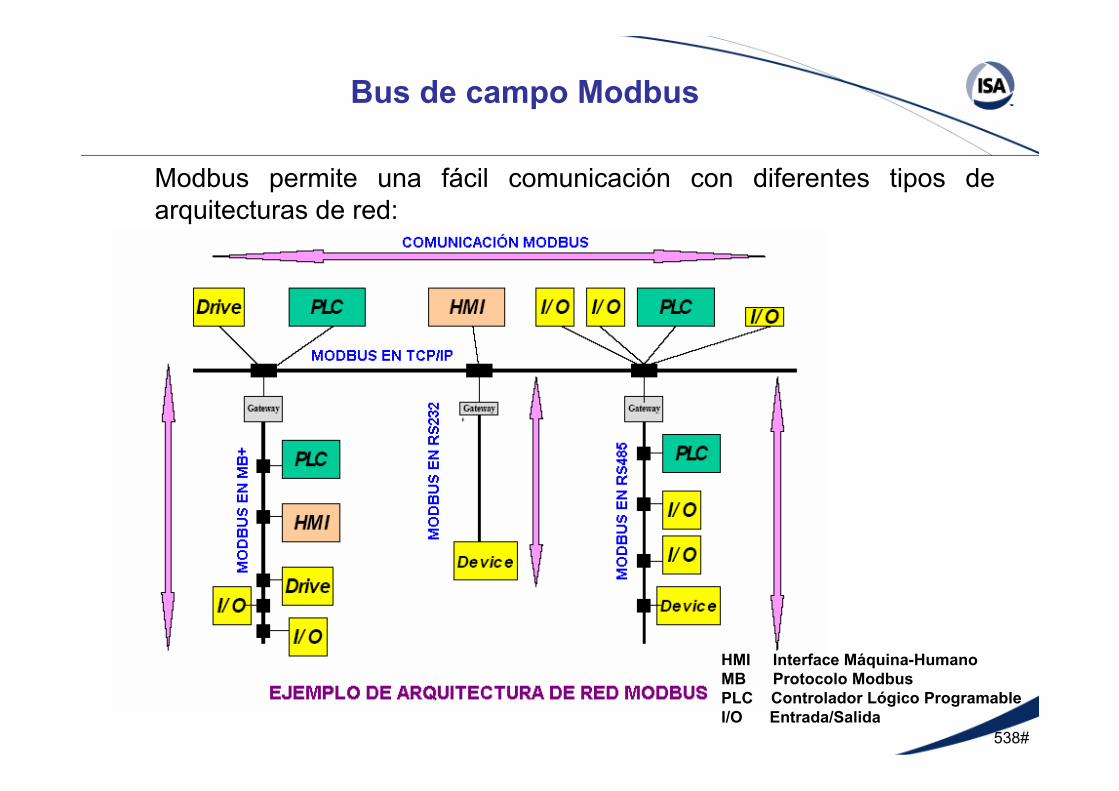
Modbus permite una fácil comunicación con diferentes tipos de arquitecturas de red:
HMI Interface Máquina-HumanoMB Protocolo ModbusPLC Controlador Lógico ProgramableI/O Entrada/Salida
539#
Bus de campo Fieldbus
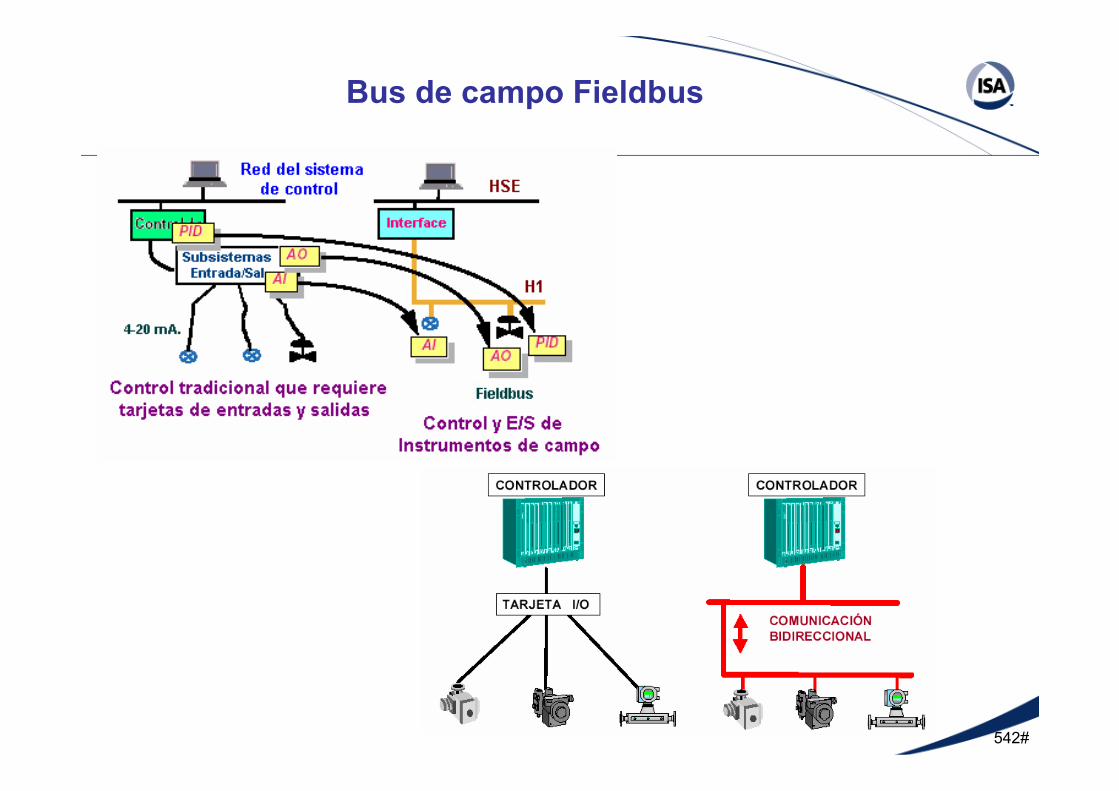
Foundation Fieldbus es una arquitectura total y abierta para la integración de información que funciona bajo un sistema de comunicación digital bidireccional serie.
- El bus H1, con una velocidad de 31.25 kbits/s, interconecta equipos de campo como, sensores, actuadores y dispositivos de E/S.
- El bus HSE, con una velocidad de 100 Mbit/s, sirve para la integración de controladores de alta velocidad (como PLC’s), subsistemas H1, servidores de datos y estaciones de trabajo.
Foundation Fieldbus es el único protocolo con la capacidad de distribuir las aplicaciones de control a través de la red.

540#
Bus de campo Fieldbus
541#
Ventajas de Fieldbus
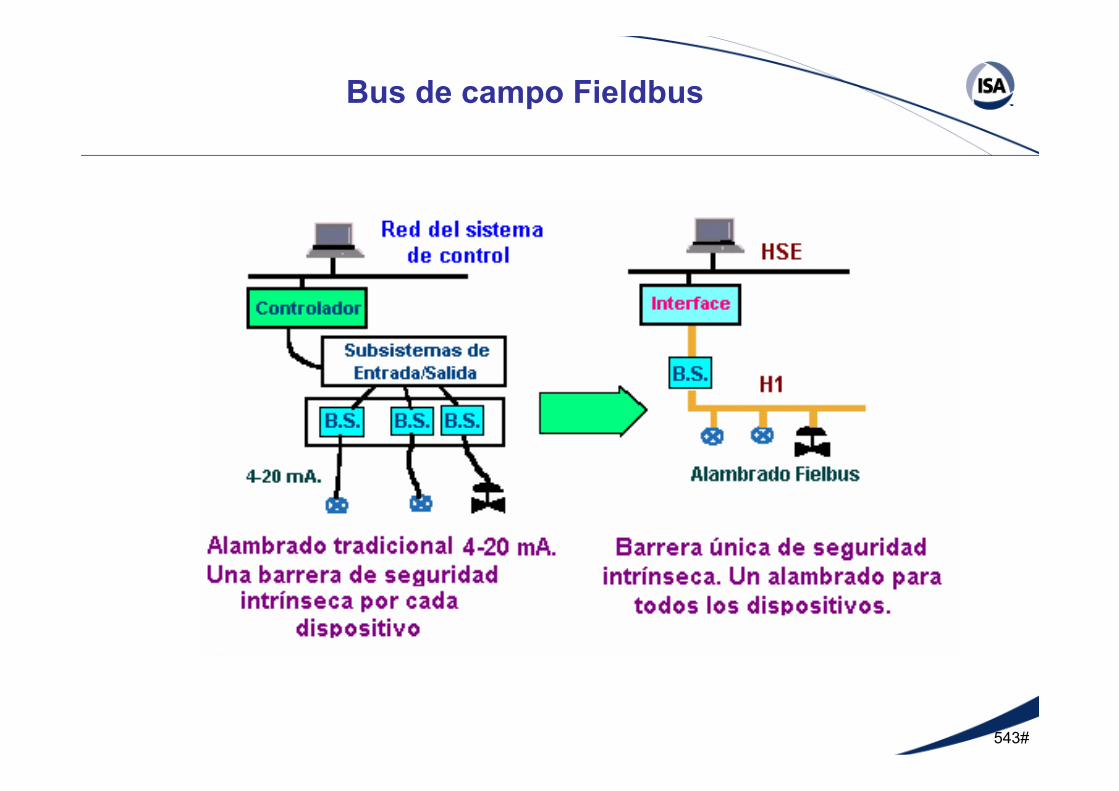
- Incrementa la capacidad debido a la comunicación digital completa.- Reduce el número de alambrado y de tableros de conexión.- Reduce el número de barreras intrínsecas de seguridad.- Reduce el número de convertidores de entrada y salida.- Reduce el número de fuentes de alimentación y gabinetes.,- Reduce el tamaño del cuarto de control.- Reduce la configuración de dispositivos.- Incrementa la exactitud de las mediciones.- Incrementa la sofisticación y la flexibilidad de la instrumentación.- Mejora el autodiagnóstico y los diagnósticos remotos.
542#
Bus de campo Fieldbus
543#
Bus de campo Fieldbus
544#
Bus de campo Profibus
La base del especificación del estándar Profibus fue un proyecto de investigación (1987-1990) llevado a cabo por: ABB, AEG, Bosch, Honeywell, Moeller, Landis & Gyr, Phoenix Contact, Rheinmetall, RMP, Sauter-cumulus, Schleicher, Siemens y cinco institutos alemanes de investigación.
El resultado de este proyecto fue el primer borrador de la norma DIN 19245 (DIN= Deutsches Institut für Normung e.V. “Instituto alemán de normas”), el estándar Profibus, partes 1 y 2. La parte 3, Profibus-DP, se definió en 1993.
Recientes estudios de mercado llevados a cabo por empresas ajenas a la Organización de Usuarios de Profibus señalan a éste como el bus con más futuro en el campo de los procesos industriales.
545#
Bus de campo Profibus
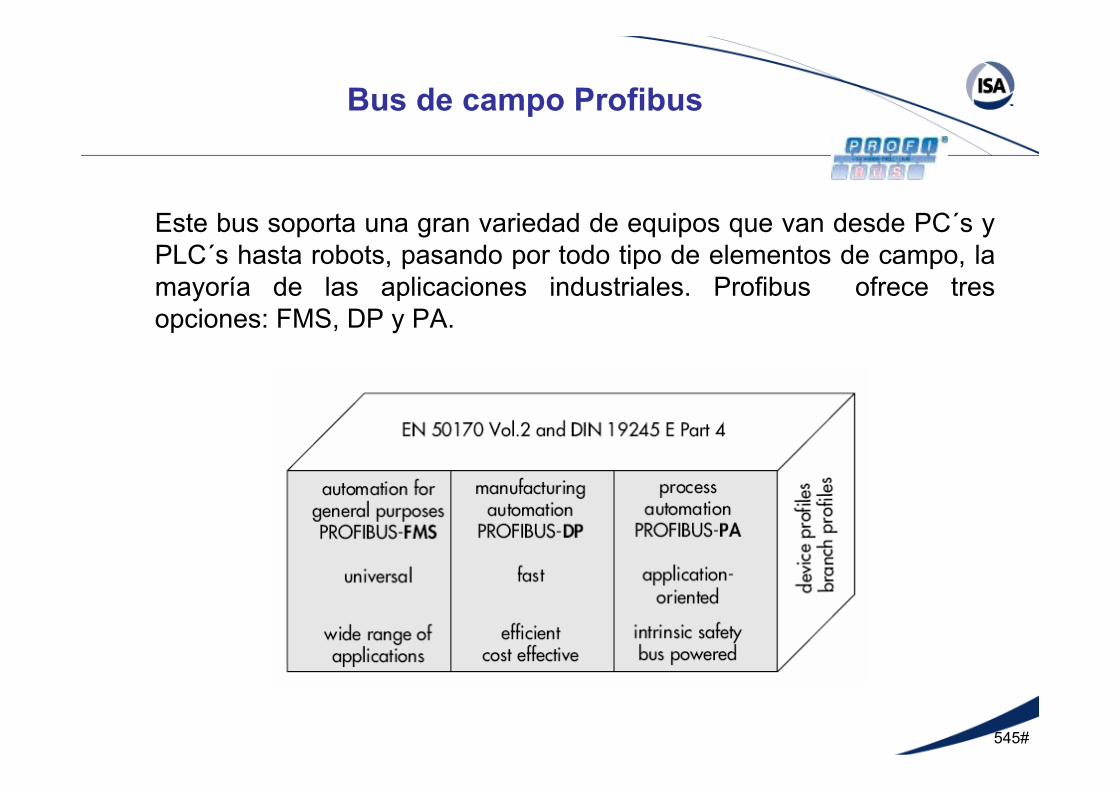
Este bus soporta una gran variedad de equipos que van desde PC´s y PLC´s hasta robots, pasando por todo tipo de elementos de campo, la mayoría de las aplicaciones industriales. Profibus ofrece tres opciones: FMS, DP y PA.
561
Standards
Certification
Education & Training
Publishing
Conferences & Exhibits
INSTRUMENTACIINSTRUMENTACIÓÓN N BBÁÁSICA DE PROCESOS SICA DE PROCESOS INDUSTRIALESINDUSTRIALES
CAPCAPÍÍTULO 9TULO 9
ELEMENTOS FINALES DE CONTROL ELEMENTOS FINALES DE CONTROL
M. en C. Armando Morales Sánchez16, 17 y 18 de mayo del 2007
562#
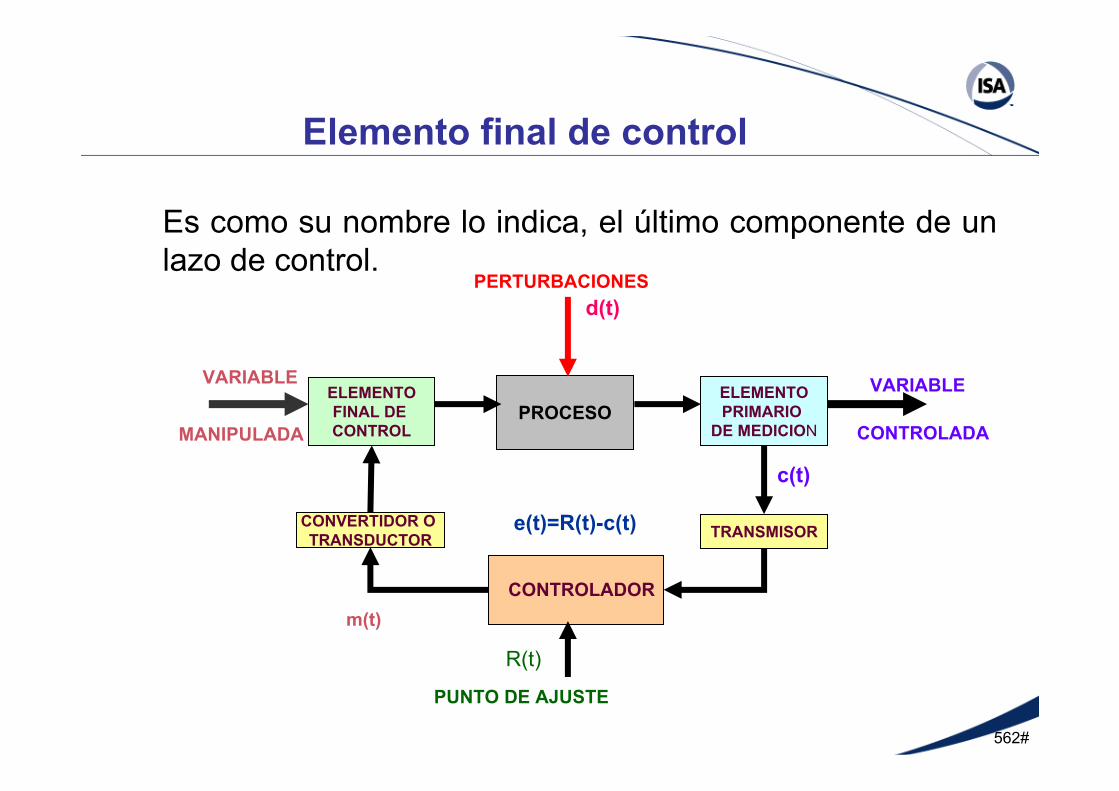
Es como su nombre lo indica, el último componente de un lazo de control.
Elemento final de control
ELEMENTOFINAL DE CONTROL
PROCESOELEMENTOPRIMARIO
DE MEDICION
CONVERTIDOR O TRANSDUCTOR TRANSMISOR
PERTURBACIONES
PUNTO DE AJUSTE
VARIABLE
CONTROLADA
VARIABLE
MANIPULADA
CONTROLADORm(t)
c(t)
d(t)
e(t)=R(t)-c(t)
R(t)
563#
En conjunto con el actuador que lo opera, recibe señales del sistema de control para modificar el flujo de masa o energía al proceso. Los elementos finales de control más comunes son:
Elemento final de control
- Válvulas de Control.- Reguladores de energía eléctrica.- Reguladores de velocidad.- Bombas y alimentadores.
De todos estos tipos, las válvulas de control representan un 95% o más de todas las aplicaciones en que interviene un elemento final de control.
564#
Válvulas de control
Una válvula de control interactúa directamente sobre las corrientes del proceso con la finalidad de absorber una cantidad adecuada de caída de presión para así mantener al sistema total en balance bajo todas las condiciones de operación. Mediante la regulación de caídas de presión se logra el control inferencial de flujo, nivel, presión, temperatura, p.H., es decir todas las variables vistas anteriormente de ahí su importancia. Su aplicación ha avanzado desde sus comienzos en los 30´s, a ser un arte en los 50´s y casi una ciencia en los 70´s. La selección de la válvula adecuada requiere la consideración de muchos factores, para cubrir las demandas del proceso en lo referente a características de control y confiabilidad mecánica.
565#
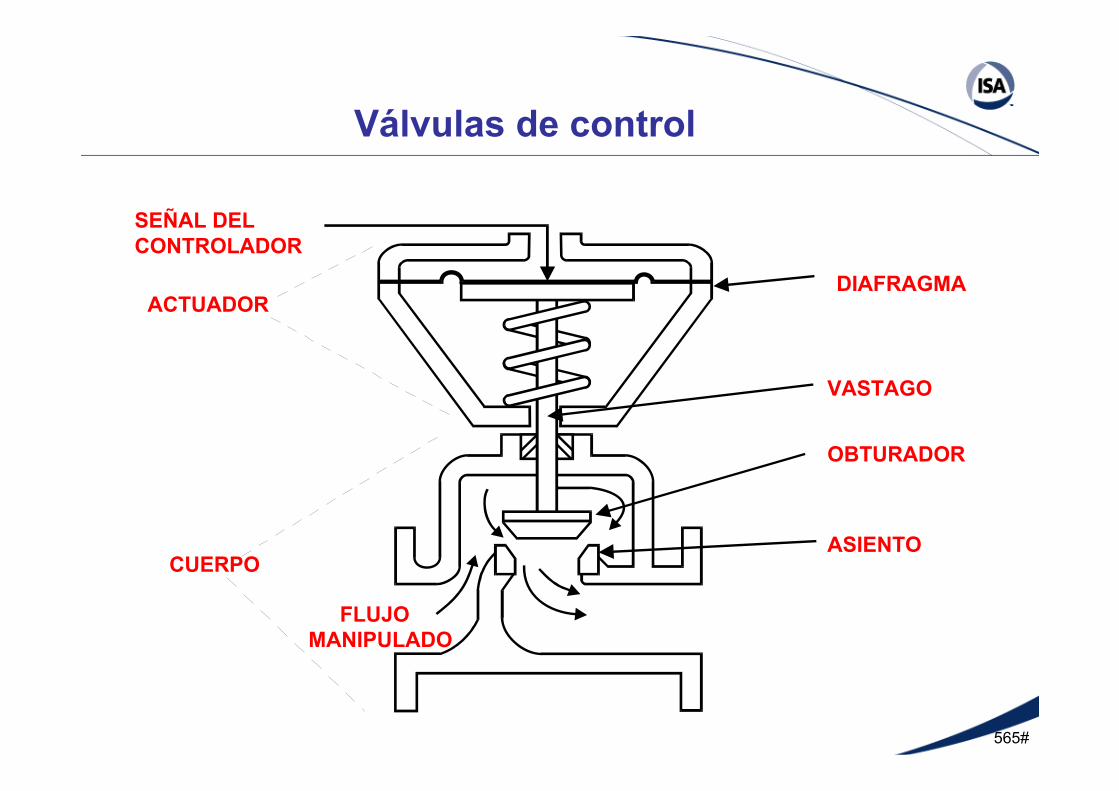
Válvulas de control
SIGNAL FROMCONTROLLER
ASIENTO
OBTURADOR
VASTAGO
DIAPHRAGMACTUADOR
CUERPO
FLUJOMANIPULADO
SEÑAL DELCONTROLADOR
DIAFRAGMA
566#
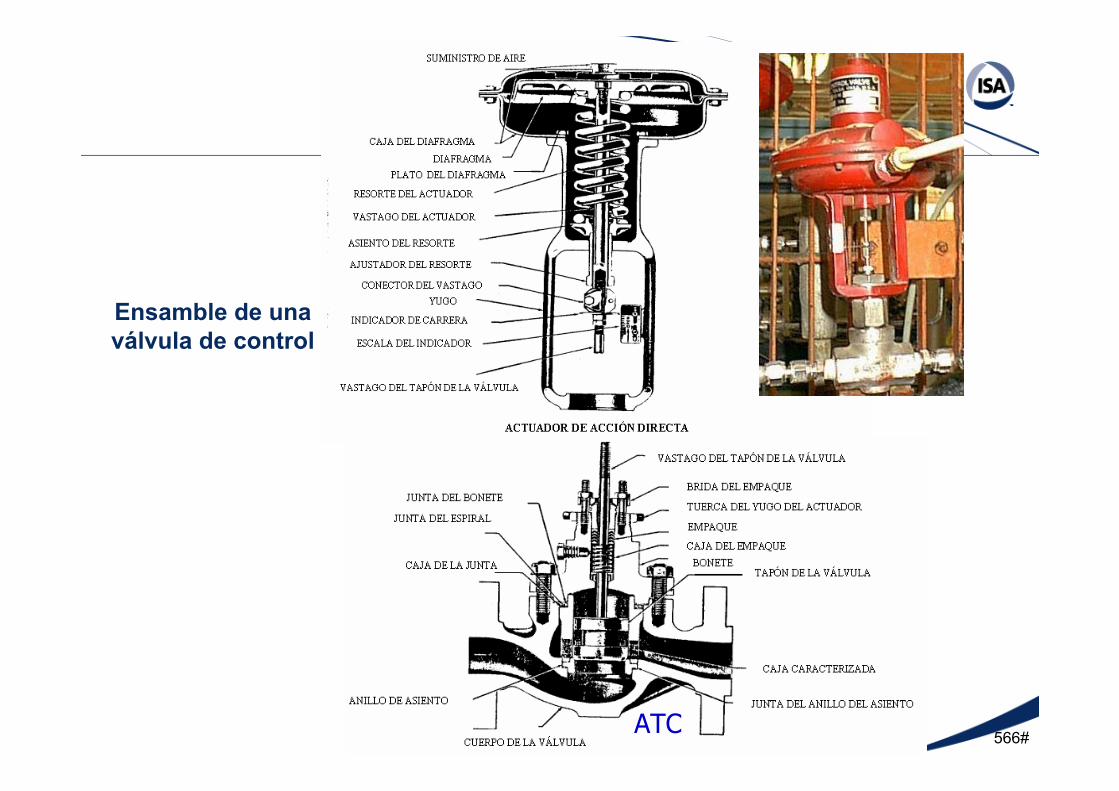
Ensamble de una válvula de control
ATC
567#
Características de control
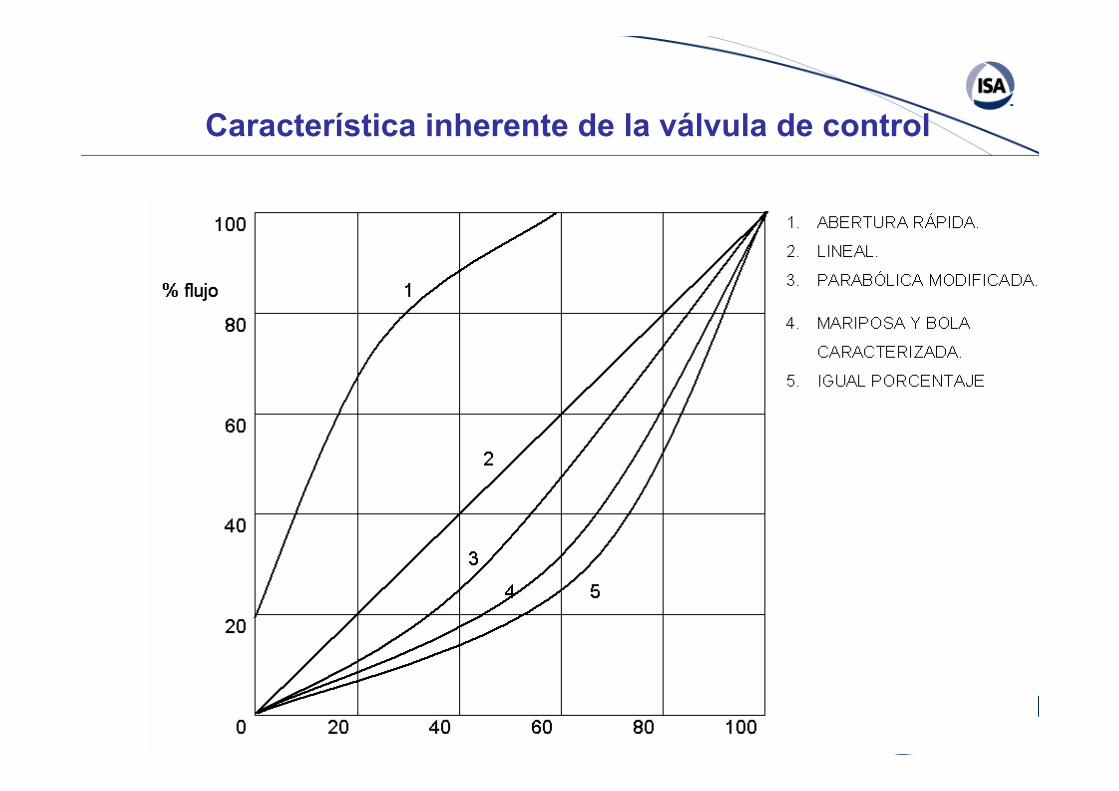
Se refiere a la verificación del flujo que pasa a través de una válvula como una función del viaje del tapón de la válvula y cubre dos casos; el primero, cuando se considera a la válvula como un elemento aislado y a este comportamiento se le conoce como característica inherente, ésta dependerá únicamente del diseño de los interiores de la válvula, los principales tipos de características inherentes son:
- Abertura rápida- Lineal- Parabólica modificada- Mariposa y bola caracterizada- Igual porcentaje
568#
Característica inherente de la válvula de control
569#
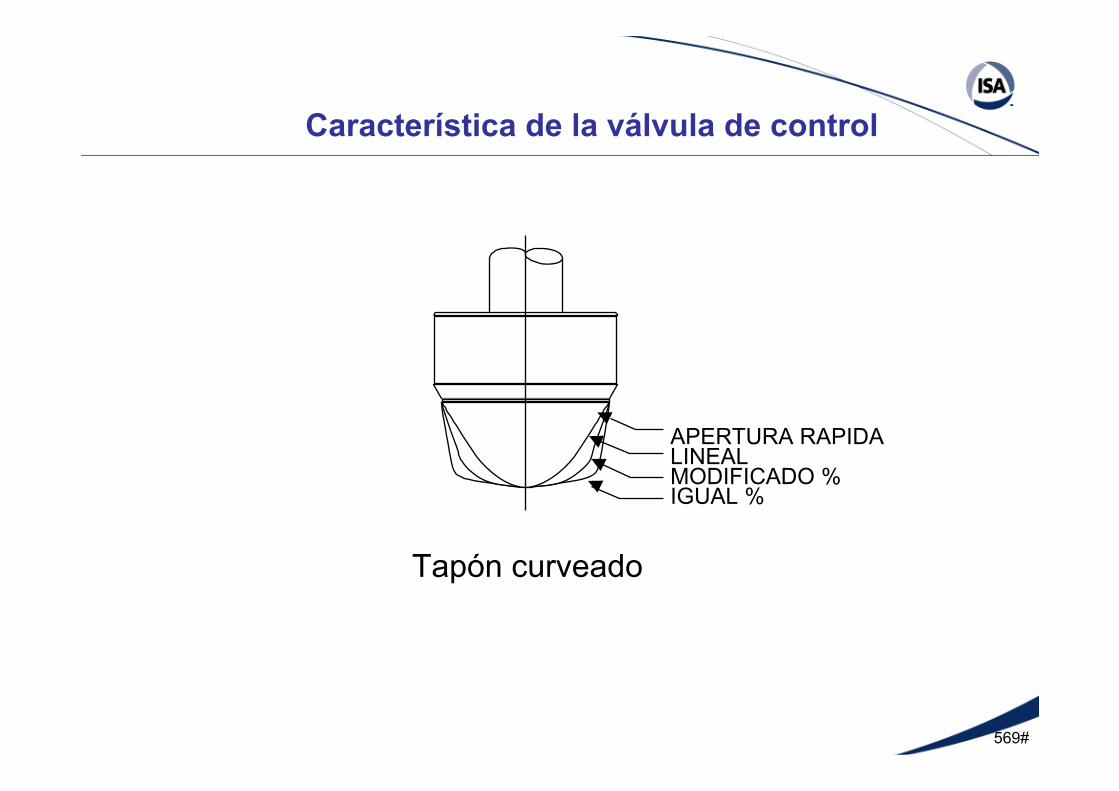
Característica de la válvula de control
Tapón curveado
APERTURA RAPIDALINEALMODIFICADO %IGUAL %
570#
Características instaladas de la válvula de control
El segundo Cuando la válvula ha sido instalada, su comportamiento cambiará, de acuerdo con el sistema y al porcentaje de caída de presión de la válvula con respecto a la caída de presión total del sistema.Ahora esta característica se conoce como instalada y es la que definirá el comportamiento de la válvula en el sistema. Si los cambios en la carga son poco apreciables, la selección de la característica de la válvula es de poca importancia debido a que las variaciones en el punto de control serán pequeñas. Pero cuando grandes variaciones en la presión y en la carga ocurran, que es lo más común, se requerirán respuestas rápidas de la válvula, siendo esta respuesta función de la característica inherente de la válvula
571#
Válvula de control Lineal
La relación entre la abertura de la válvula y el flujo a caída de presión constante es una línea recta. Son usadas en las siguientes aplicaciones:- En procesos lentos.- Cuando más del cuarenta por ciento de la caída de presión del sistema ocurre en la válvula.- Cuando la mayoría de los cambios en el proceso sean resultado de carga.- Como primer alternativa en las aplicaciones de control de nivel.
572#
Válvula de control de igual porcentaje
En este caso la relación es exponencial. La principal propiedad de esta característica es que a igual incremento en el movimiento del vástago de la válvula, producirá un cambio de igual porcentaje en el flujo a caída de presión constante, basado en el flujo antes que el cambio sea hecho. Se utiliza en: - En procesos rápidos.- Cuando alta rangeabilidad es requerida.- Cuando la dinámica del proceso no sea bien conocida.-
573#
Válvula de control de igual porcentaje
- En cambiadores de calor cuando un incremento en el flujo del producto, requiere mucho mayor incremento en el medio de enfriamiento o calentamiento.- Para cierre rápido.Como primera alternativa en aplicaciones de control de
flujo y Presión.
574#
Válvula de control de igual porcentaje
Una válvula con característica de igual porcentaje pierde su característica inherente a medida que esta absorba menos de la caída de presión dinámica del sistema, tendiendo hacia la característica lineal. Ésta es aún la mejor elección cuando la dinámica del sistema no es bien conocida, para esto mantiene una característica deseable de control sobre un amplio rango de las caídas de presión dinámicas. Tiene también amplia rangeabilidad, la cual es deseable cuando las cargas del sistema no son bien conocidas.
575#
Válvula de control de abertura rápida
No es común asignarle una definición matemática a esta característica. Su comportamiento es aproximadamente lineal en un 25% del viaje del tapón desde que éste se encuentra cerrado, y en este intervalo se maneja del 60% al 70% del flujo total. Si se usa en este rango se puede considerar como lineal, su uso fuera del mismo es raro excepto en servicio abierto-cerrado. Son usadas en:
- Control de dos posiciones.- Cuando la máxima capacidad de la válvula debe ser obtenida rápidamente.

576#
Consideraciones mecánicas de una válvula de control
Las consideraciones mecánicas de una válvula de control se basan en la construcción física de la misma, que consta de dos partes: cuerpo y actuador.
El cuerpo es la parte de la válvula de control que maneja el fluido de proceso. Cuando éste se encuentra adecuadamente operado por un actuador, modulará el flujo del fluido del proceso para ayudar a regular la presión, flujo, temperatura, nivel o alguna otra variable, en un sistema de control en particular. El ensamble del cuerpo de la válvula consiste en un cuerpo resistente a la presión, un bonete o ensamble de cierre superior y los interiores.
577#
Cuerpo de la válvula de control
Generalmente el estilo y forma de la válvula depende del tipo de interiores que ésta contiene, además de los requerimientos de conexiones que necesita la tubería en particular.
Debido a las crecientes necesidades de los procesos se han desarrollado una extensa variedad de tipos de cuerpos de válvulas de control, sin embargo, con tres tipos de válvulas se puede satisfacer prácticamente la mayoría de las aplicaciones normales de control: bola, mariposa yglobo. Aunque existen otros tipos como: tapón, diafragma, compuerta y solenoide.
578#
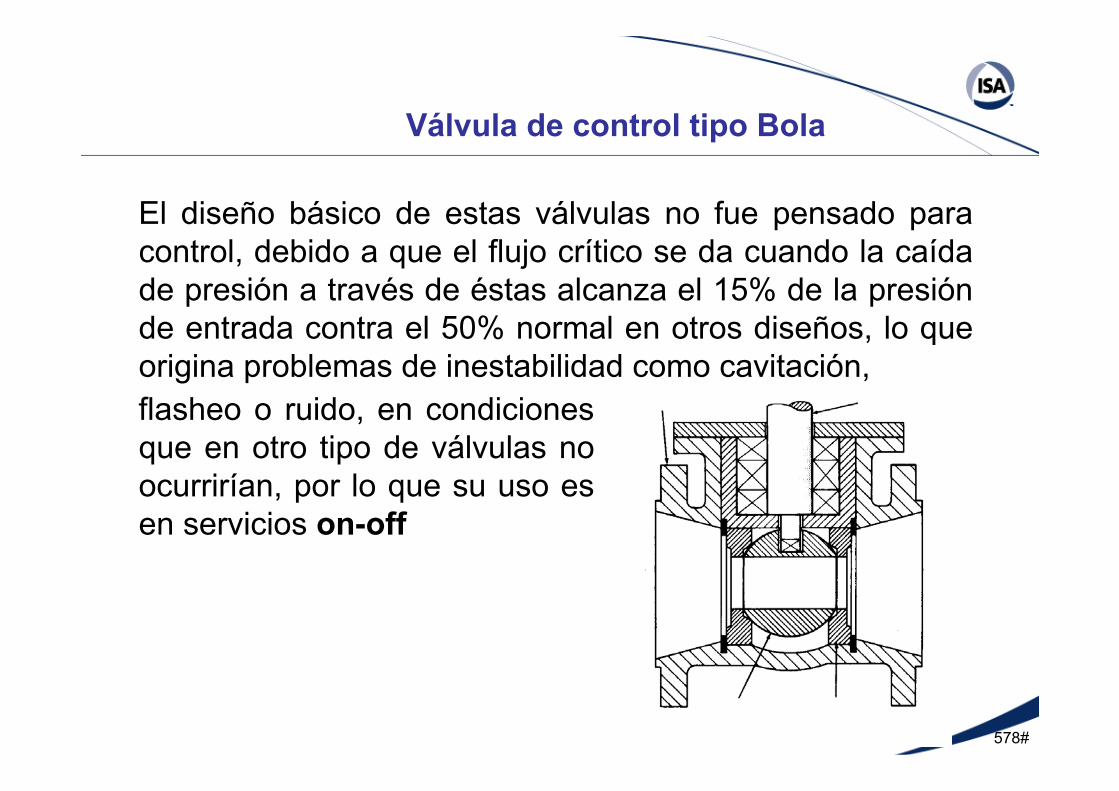
Válvula de control tipo Bola
El diseño básico de estas válvulas no fue pensado para control, debido a que el flujo crítico se da cuando la caída de presión a través de éstas alcanza el 15% de la presión de entrada contra el 50% normal en otros diseños, lo que origina problemas de inestabilidad como cavitación,flasheo o ruido, en condiciones que en otro tipo de válvulas no ocurrirían, por lo que su uso es en servicios on-off
579#
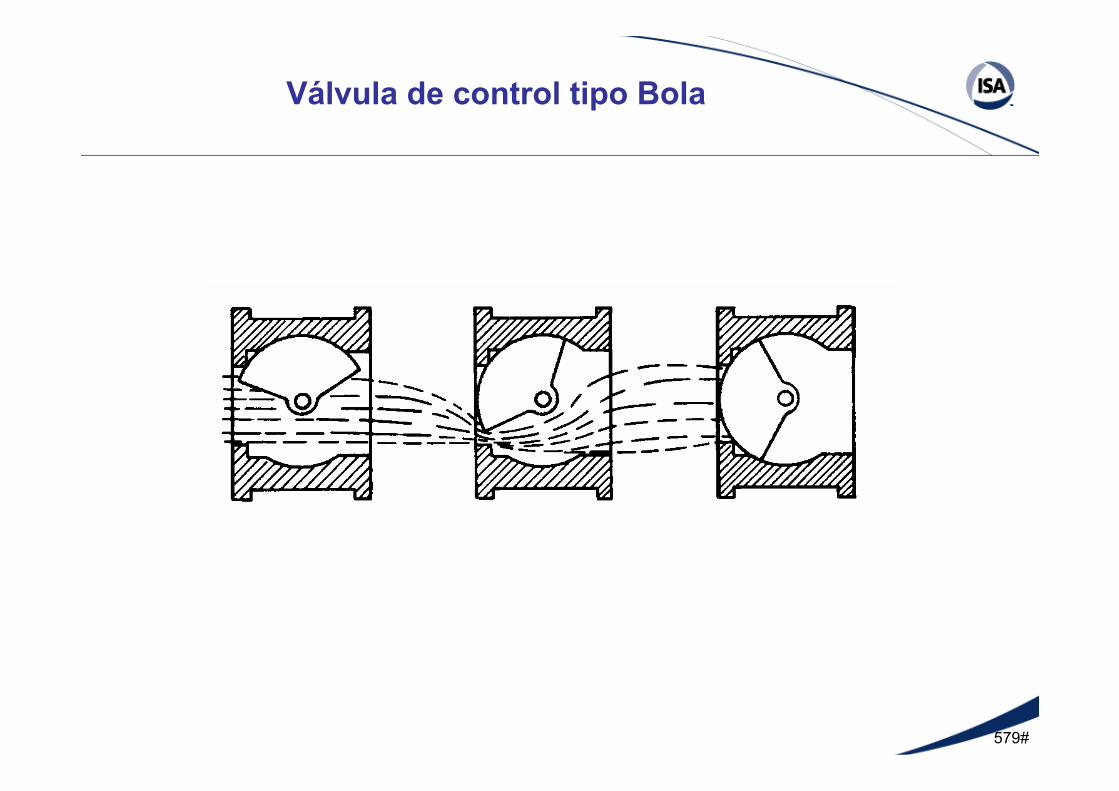
Válvula de control tipo Bola
580#
Válvula de control tipo Bola
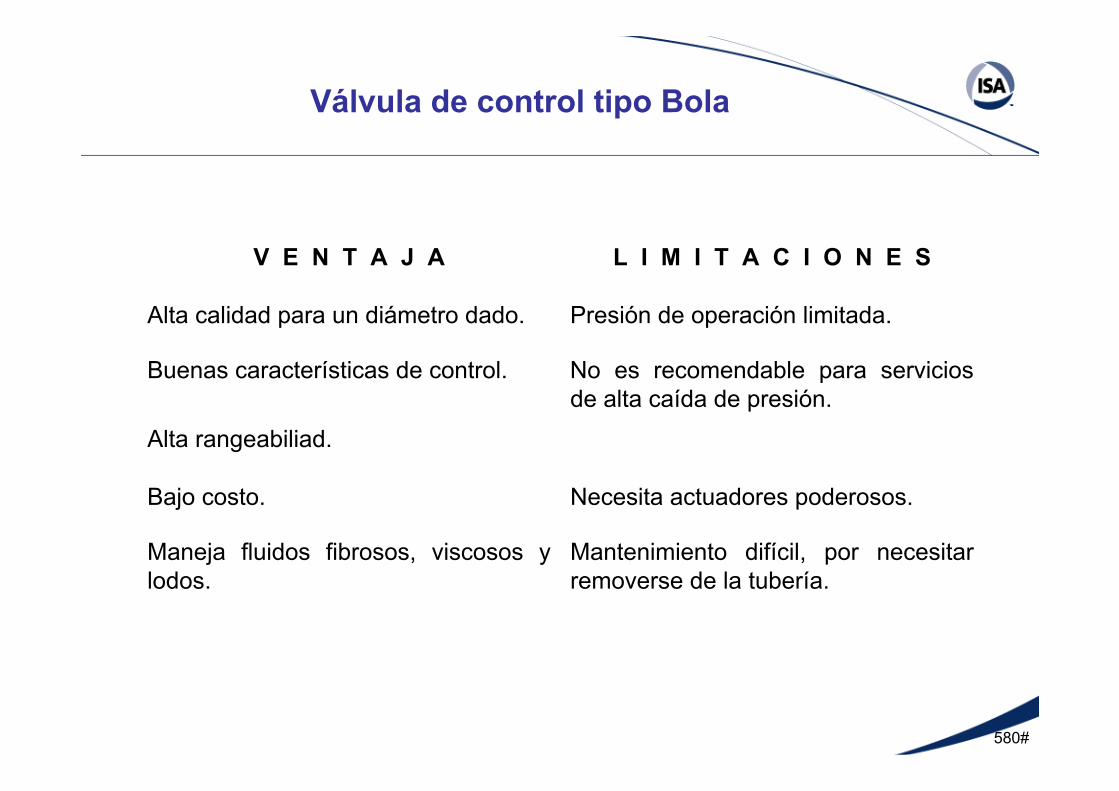
V E N T A J A L I M I T A C I O N E S
Alta calidad para un diámetro dado. Presión de operación limitada.
Buenas características de control. No es recomendable para servicios de alta caída de presión.
Alta rangeabiliad.
Bajo costo. Necesita actuadores poderosos.
Maneja fluidos fibrosos, viscosos y lodos.
Mantenimiento difícil, por necesitar removerse de la tubería.
581#
Válvula de control tipo Mariposa
Este tipo de válvulas es probablemente uno de los diseños más antiguos aún en uso, originalmente fue usada en muchos de los primeros hornos de tiro natural, el regulador de tiro usado en las estufas de cocinas antiguas es una válvula de mariposa. Esta válvula fue ampliamente aceptada solo a partir de los 20´s, y es a partir de entonces cuando su diseño original ha experimentado grandes variaciones y mejoras hasta llegar a ser un dispositivo de control confiable, capaz de producir altas caídas de presión y asegurar cierre firme, además, sus características de auto limpieza y su patrón de flujo lineal son adecuados para algunos servicios sólidos-líquidos.
582#
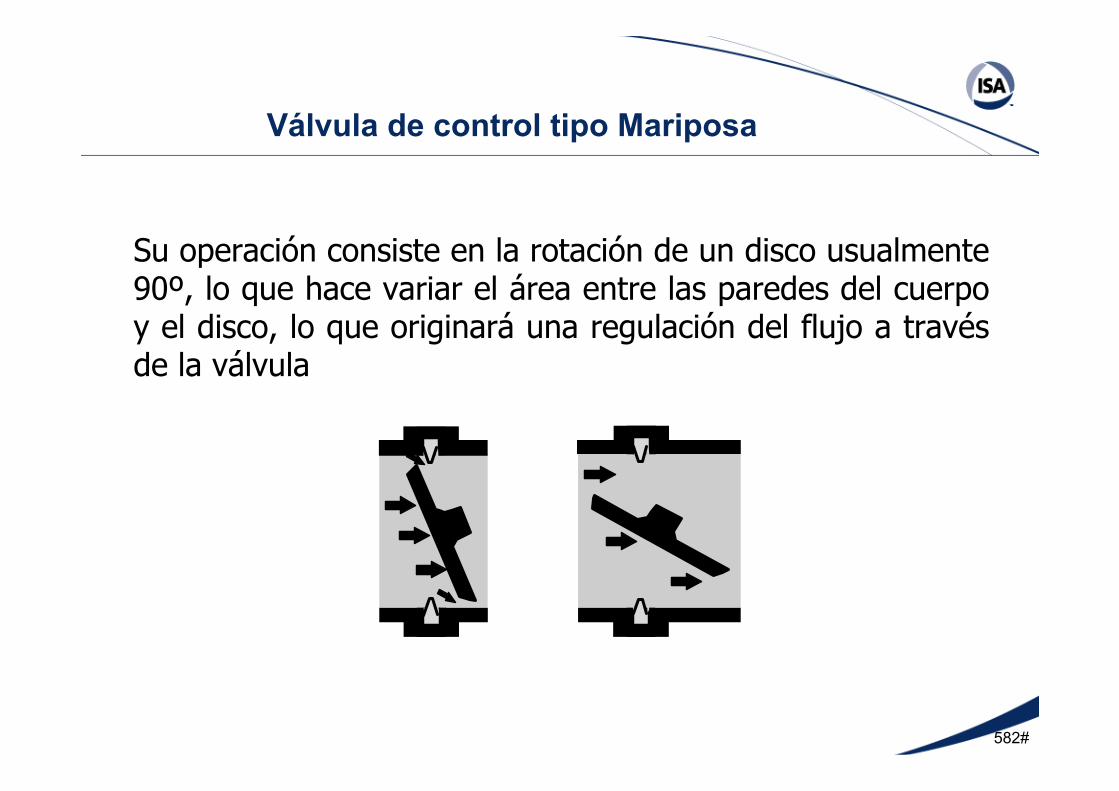
Válvula de control tipo Mariposa
Su operación consiste en la rotación de un disco usualmente 90º, lo que hace variar el área entre las paredes del cuerpo y el disco, lo que originará una regulación del flujo a través de la válvula
583#
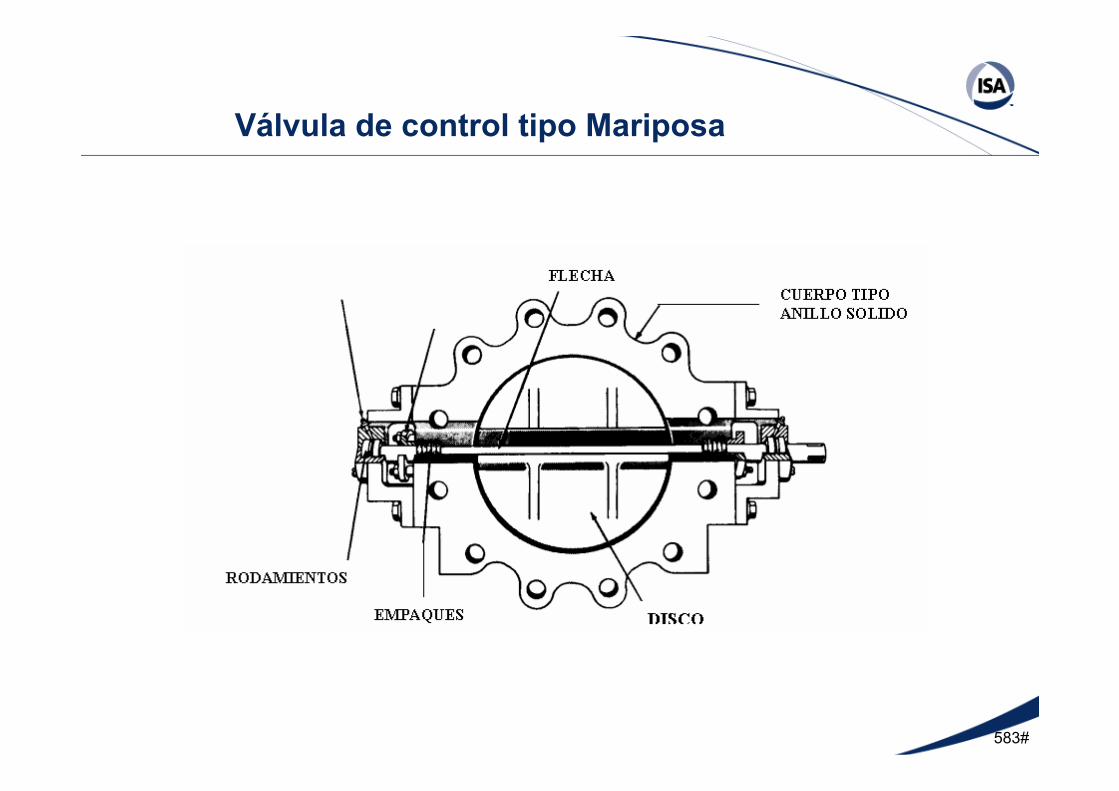
Válvula de control tipo Mariposa
584#
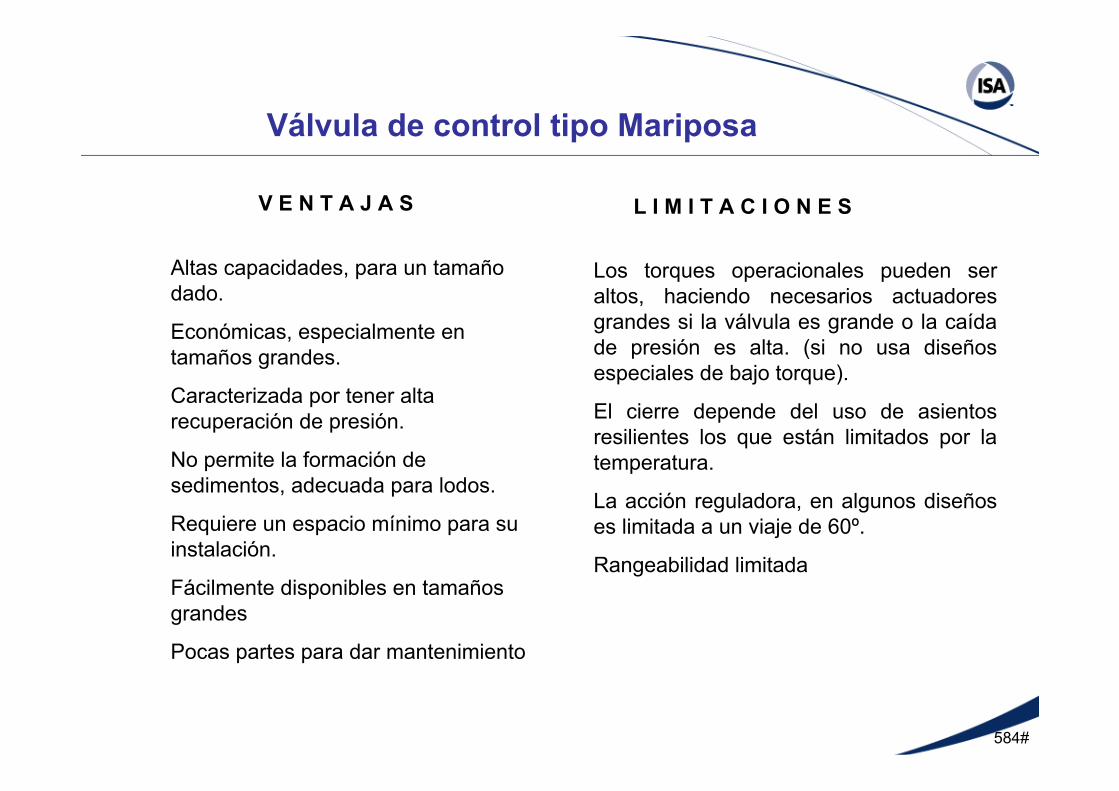
Válvula de control tipo Mariposa
Altas capacidades, para un tamaño dado.
Económicas, especialmente en tamaños grandes.
Caracterizada por tener alta recuperación de presión.
No permite la formación de sedimentos, adecuada para lodos.
Requiere un espacio mínimo para su instalación.
Fácilmente disponibles en tamaños grandes
Pocas partes para dar mantenimiento
Los torques operacionales pueden ser altos, haciendo necesarios actuadores grandes si la válvula es grande o la caída de presión es alta. (si no usa diseños especiales de bajo torque).
El cierre depende del uso de asientos resilientes los que están limitados por la temperatura.
La acción reguladora, en algunos diseños es limitada a un viaje de 60º.
Rangeabilidad limitada
V E N T A J A S L I M I T A C I O N E S
585#
Válvula de control tipo globo
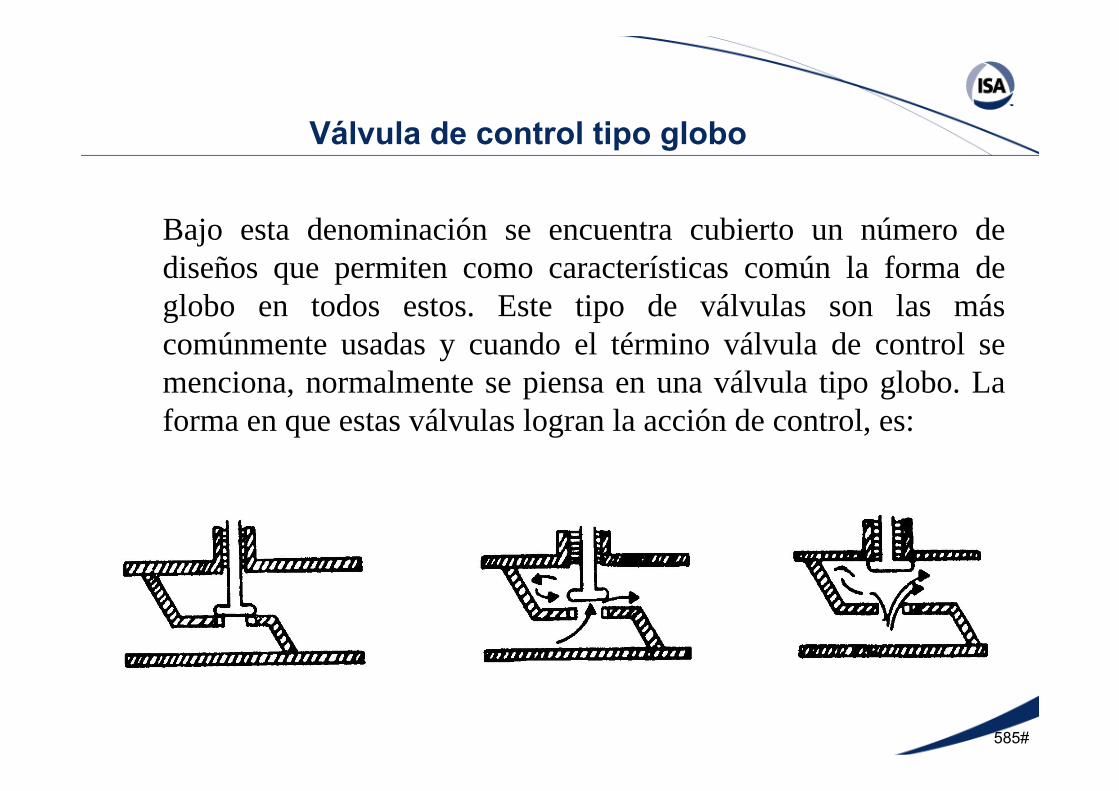
Bajo esta denominación se encuentra cubierto un número de diseños que permiten como características común la forma de globo en todos estos. Este tipo de válvulas son las más comúnmente usadas y cuando el término válvula de control se menciona, normalmente se piensa en una válvula tipo globo. La forma en que estas válvulas logran la acción de control, es:
586#
Tipos de válvulas de control tipo globo
Válvulas de puerto sencillo.
Válvulas de puerto doble.
Válvulas de caja.
Válvulas de ángulo.
Válvulas de tres vías.
587#
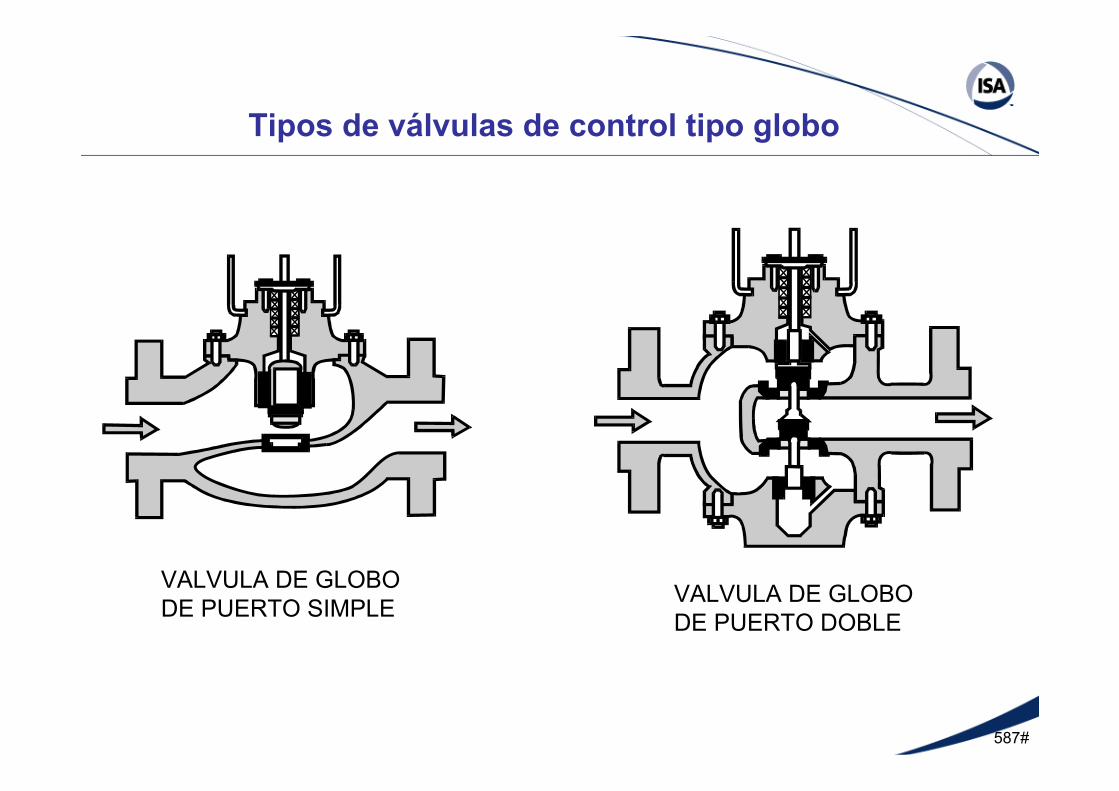
Tipos de válvulas de control tipo globo
VALVULA DE GLOBO DE PUERTO SIMPLE VALVULA DE GLOBO
DE PUERTO DOBLE

588#
Válvulas tipo globo de puerto sencillo
Esta válvula tiene un puerto único. Debido a su construcción simple, fácil accesibilidad y economía en su diseño básico, estas válvulas son de uso extenso y se puede considerar que intervienen en la inmensa mayoría de las aplicaciones que requiere una válvula de control. Proporcionan cierre hermético, pero debido a deficiencias en el diseño de tapón, este estará sujeto a fuerzas de desbalance por lo que se deben usar actuadores de mayor poder.
589#
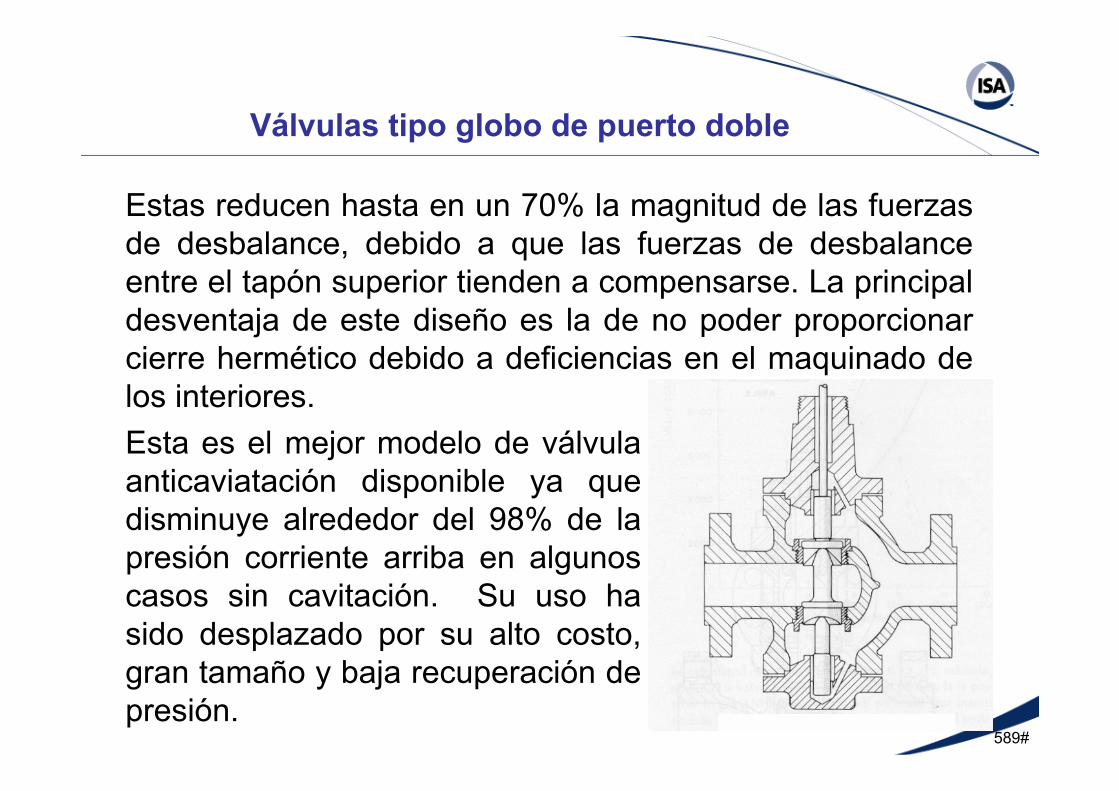
Válvulas tipo globo de puerto doble
Estas reducen hasta en un 70% la magnitud de las fuerzas de desbalance, debido a que las fuerzas de desbalanceentre el tapón superior tienden a compensarse. La principal desventaja de este diseño es la de no poder proporcionar cierre hermético debido a deficiencias en el maquinado de los interiores. Esta es el mejor modelo de válvula anticaviatación disponible ya que disminuye alrededor del 98% de la presión corriente arriba en algunos casos sin cavitación. Su uso ha sido desplazado por su alto costo, gran tamaño y baja recuperación de presión.
590#
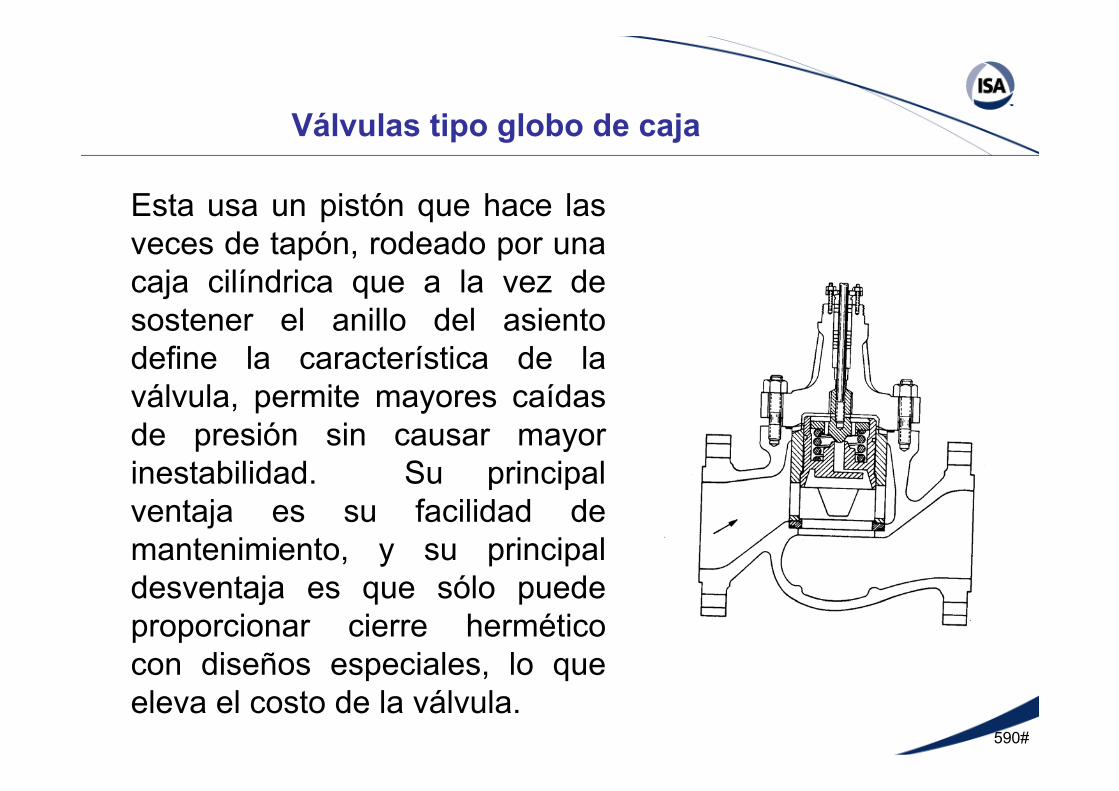
Válvulas tipo globo de caja
Esta usa un pistón que hace las veces de tapón, rodeado por una caja cilíndrica que a la vez de sostener el anillo del asiento define la característica de la válvula, permite mayores caídas de presión sin causar mayor inestabilidad. Su principal ventaja es su facilidad de mantenimiento, y su principal desventaja es que sólo puede proporcionar cierre hermético con diseños especiales, lo que eleva el costo de la válvula.
591#
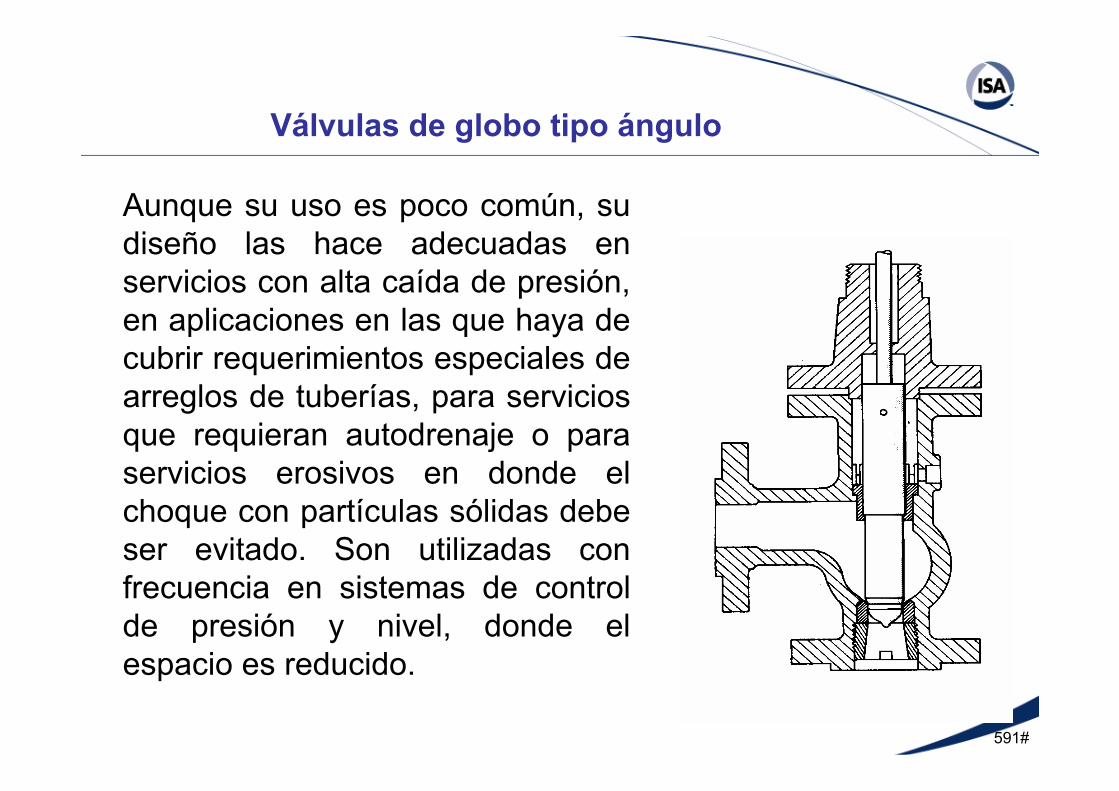
Válvulas de globo tipo ángulo
Aunque su uso es poco común, su diseño las hace adecuadas en servicios con alta caída de presión, en aplicaciones en las que haya de cubrir requerimientos especiales de arreglos de tuberías, para servicios que requieran autodrenaje o para servicios erosivos en donde el choque con partículas sólidas debe ser evitado. Son utilizadas con frecuencia en sistemas de control de presión y nivel, donde el espacio es reducido.
592#
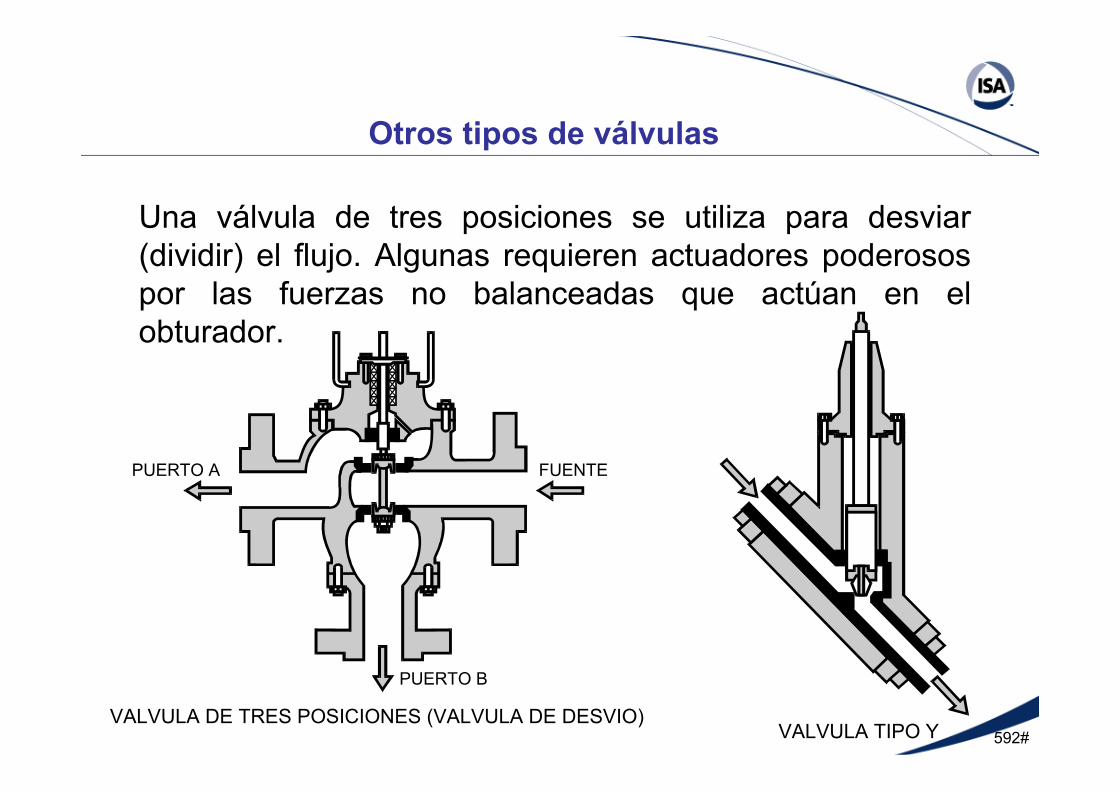
Otros tipos de válvulas
VALVULA TIPO Y
PUERTO A
PUERTO B
FUENTE
VALVULA DE TRES POSICIONES (VALVULA DE DESVIO)
Una válvula de tres posiciones se utiliza para desviar (dividir) el flujo. Algunas requieren actuadores poderosos por las fuerzas no balanceadas que actúan en el obturador.
593#
Dimensionamiento de una válvula
Al seleccionar una válvula se debe tener cuidado en:Datos de la aplicación:
Velocidad máxima y mínima del flujoCaída de presión Temperatura del fluido
Datos del fluidoNombre del fluidoFase (gas, líquido)Densidad (gravedad especifica, peso especifico, peso molecular)Viscosidad (líquidos)Presión de vapor (gases)
Influencia de la tuberíaPresencia de reductores u otras perturbaciones
594#
Dimensionamiento de una válvula
Influencia del sistemaDinámica del control (Es el sobredimensionamiento importante)Factor económicoSeguridad
Estilo de la válvula (basada en aplicación)Capacidadresistencia a la erosión y corrosión
Cálculos del dimensionamientoCoeficientes del tamaño Formulas de selección
595#
Capacidad Cv de una Válvula de control
La capacidad de una válvula referida en unidades de Cv, esto es el número de galones por minuto de agua que pasan a través de la válvula con una caída de presión de una lb/pulg2 a 60ºF, es función de su diseño y del diámetro del puerto de la válvula. Esta capacidad variarámucho de diseño a diseño y en caso extremos de flujo máximo y mínimo alguno de estos diseños será incapaz de manejarlos, la válvula de mariposa y la de bola caracterizada son capaces de manejar eficientemente flujos altos, mientras que una válvula de globo que manejará estos mismos flujos generalmente es muy voluminosa y pesada en comparación a las anteriores.
596#
Es la relación entre el flujo máximo y el flujo mínimo controlable, donde controlable implica que la desviación no exceda ciertos límites establecidos a partir de su característica inherente de flujo y es importante cuando:
- Indica el punto en que la válvula actuará como un dispositivo abierto-cerrado o pierde control completamente debido a fugas.- Establece el punto en el que la característica de empuje ascendente del flujo se desvía de lo separado.- Una válvula deberá manejar eficientemente varias condiciones de flujo alejadas entre sí.
Las válvulas de mariposa y bola caracterizada son las que mejores características de rangeabilidad ofrecen.
Rangeabilidad de una Válvula de control
597#
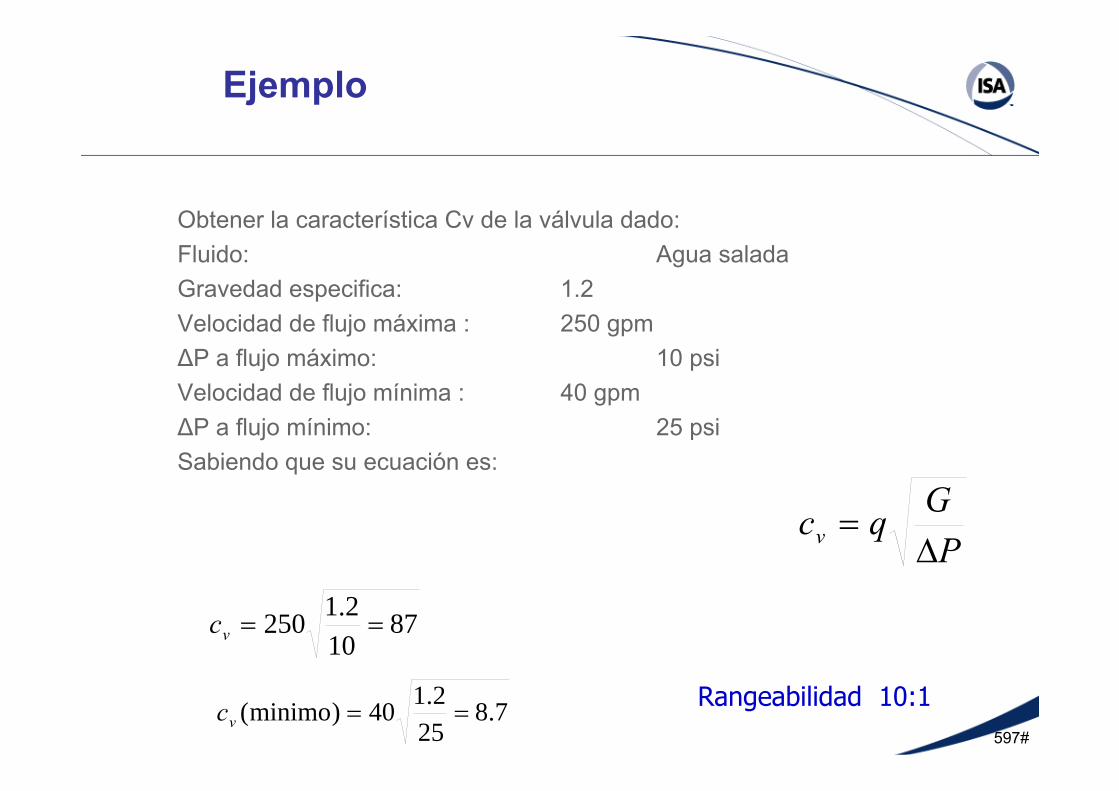
Ejemplo
Obtener la característica Cv de la válvula dado:Fluido: Agua saladaGravedad especifica: 1.2Velocidad de flujo máxima : 250 gpmΔP a flujo máximo: 10 psiVelocidad de flujo mínima : 40 gpmΔP a flujo mínimo: 25 psiSabiendo que su ecuación es:
PGqcv Δ
=
8710
2.1250 ==vc
7.825
2.140)minimo( ==vc Rangeabilidad 10:1
598#
Recomendación…
Existen muchos factores para seleccionar una válvula, el ejemplo anterior, solo aplica a líquidos incompresibles y con un numero de Reynolds mayor a 500, si se desea conocer más técnicas se recomienda el“ISA Handbook of control Valves” o “ISA standard S39.4”
599#
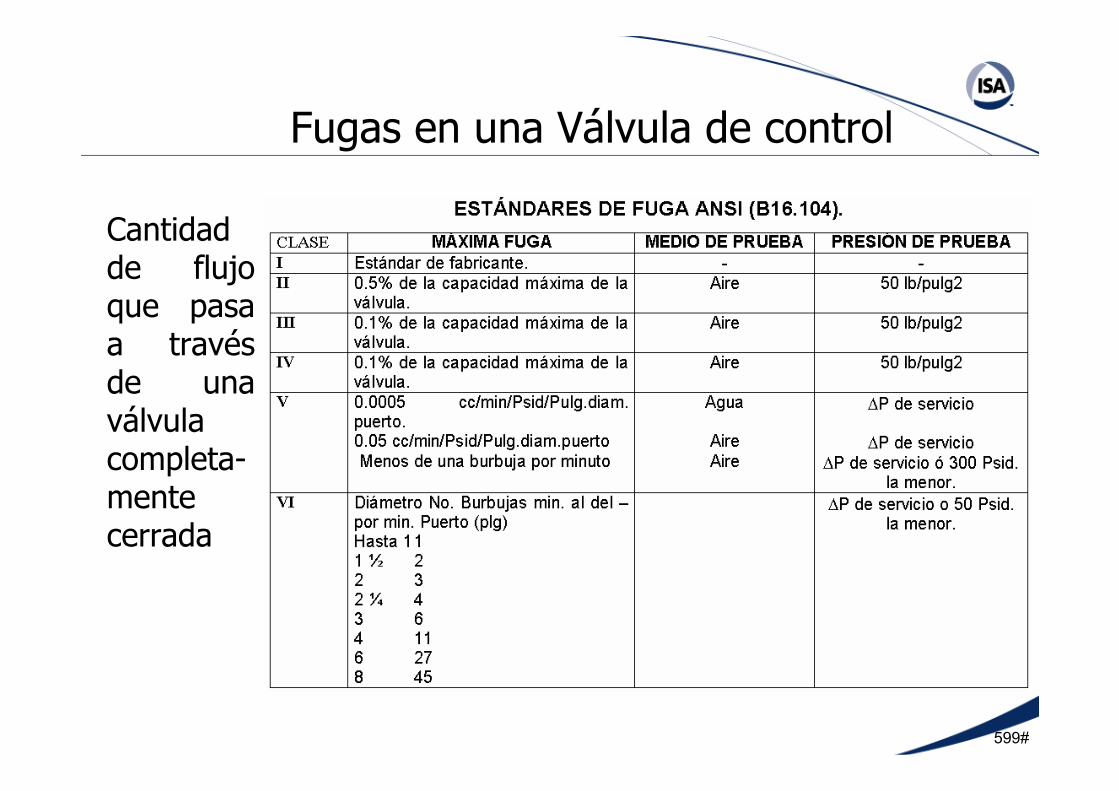
Cantidad de flujo que pasa a través de una válvula completa-mente cerrada
Fugas en una Válvula de control
600#
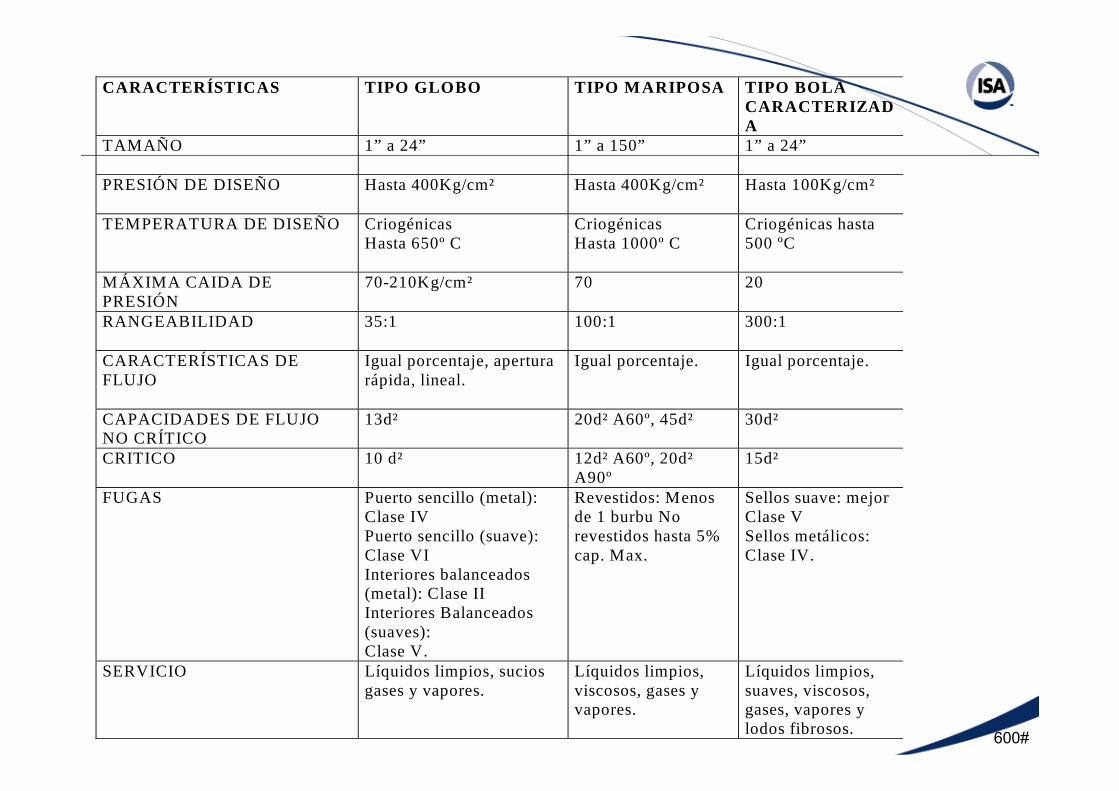
CARACTERÍSTICAS TIPO GLOBO TIPO M ARIPOSA TIPO BOLA CARACTERIZADA
TAMAÑO
1” a 24” 1” a 150” 1” a 24”
PRESIÓN DE DISEÑO
Hasta 400Kg/cm² Hasta 400Kg/cm² Hasta 100Kg/cm²
TEMPERATURA DE DISEÑO Criogénicas Hasta 650º C
Criogénicas Hasta 1000º C
Criogénicas hasta 500 ºC
MÁXIMA CAIDA DE PRESIÓN
70-210Kg/cm² 70 20
RANGEABILIDAD 35:1 100:1 300:1
CARACTERÍSTICAS DE FLUJO
Igual porcentaje, apertura rápida, lineal.
Igual porcentaje. Igual porcentaje.
CAPACIDADES DE FLUJO NO CRÍTICO
13d² 20d² A60º, 45d² 30d²
CRITICO 10 d² 12d² A60º, 20d² A90º
15d²
FUGAS Puerto sencillo (metal): Clase IV Puerto sencillo (suave): Clase VI Interiores balanceados (metal): Clase II Interiores Balanceados (suaves): Clase V.
Revestidos: Menos de 1 burbu No revestidos hasta 5% cap. Max.
Sellos suave: mejor Clase V Sellos metálicos: Clase IV.
SERVICIO Líquidos limpios, sucios gases y vapores.
Líquidos limpios, viscosos, gases y vapores.
Líquidos limpios, suaves, viscosos, gases, vapores y lodos fibrosos.
601#
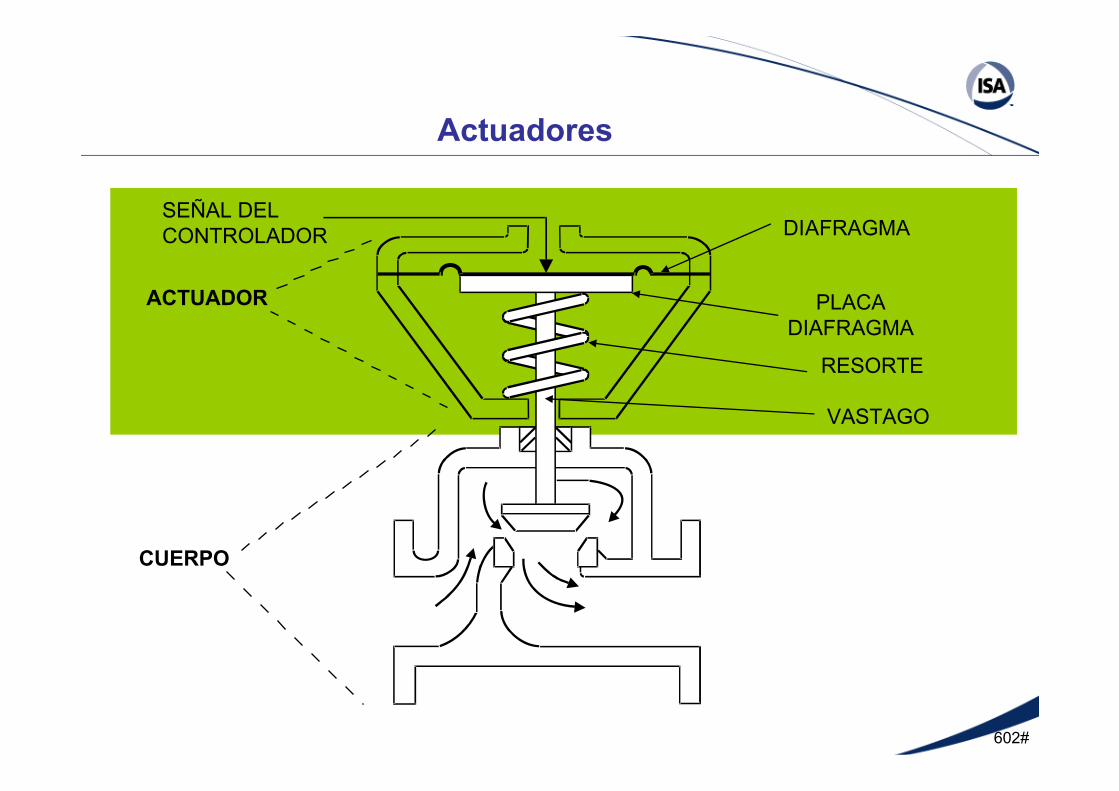
Actuadores
Las válvulas pueden ser accionadas neumáticamente, eléctricamente o hidráulicamente. El actuador neumático es el más ampliamente utilizado. Es simple, barato, no tiene fricción y su velocidad es limitada sólo por el índice con el cuál el aire puede ser mandado al actuador y retirado del mismo.La posición a falla de la válvula es la posición de la válvula cuando la energía (suministro de aire) falla. Puede estar abierta, cerrada en la última posición o desconocida. Aunque los actuadores de resorte-diafragma proporcionan una operación de falla segura por diseño, algunos actuadores de pistón requieren accesorios para proporcionar operación de falla segura.
602#
Actuadores
SEÑAL DELCONTROLADOR
VASTAGO
DIAFRAGMA
ACTUADOR
CUERPO
RESORTE
PLACADIAFRAGMA
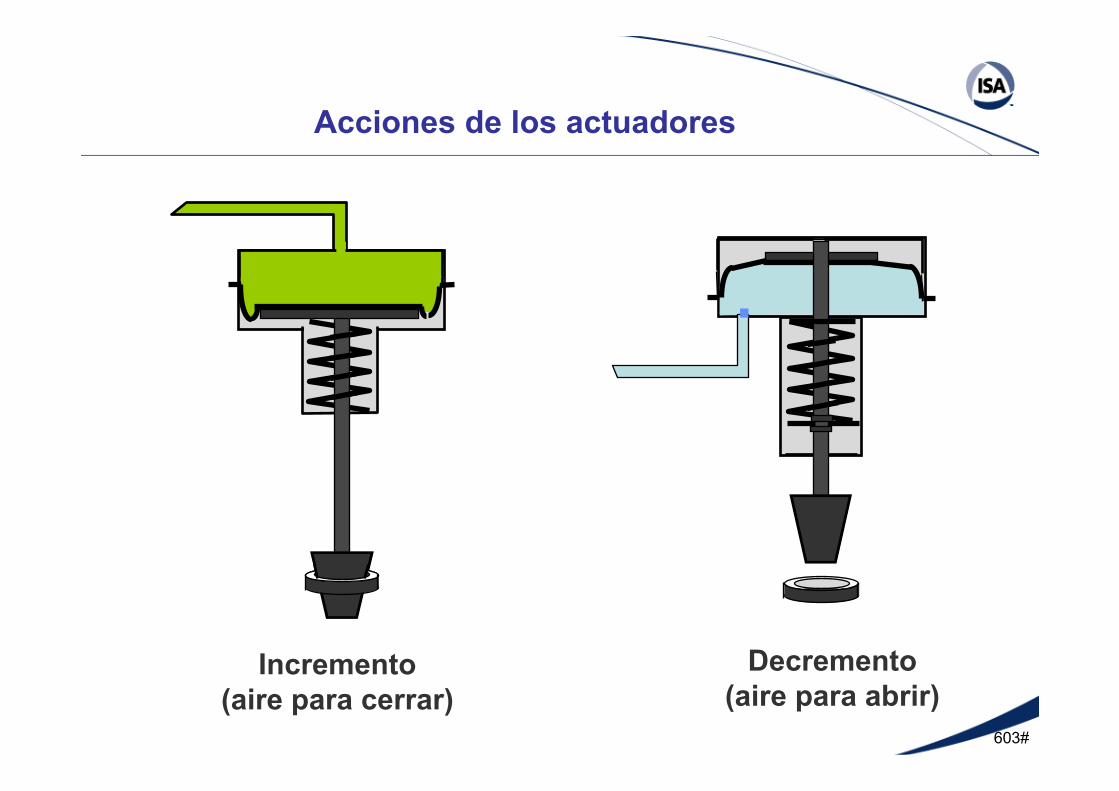
603#
Incremento(aire para cerrar)
Decremento (aire para abrir)
Acciones de los actuadores
604#
Posicionadores
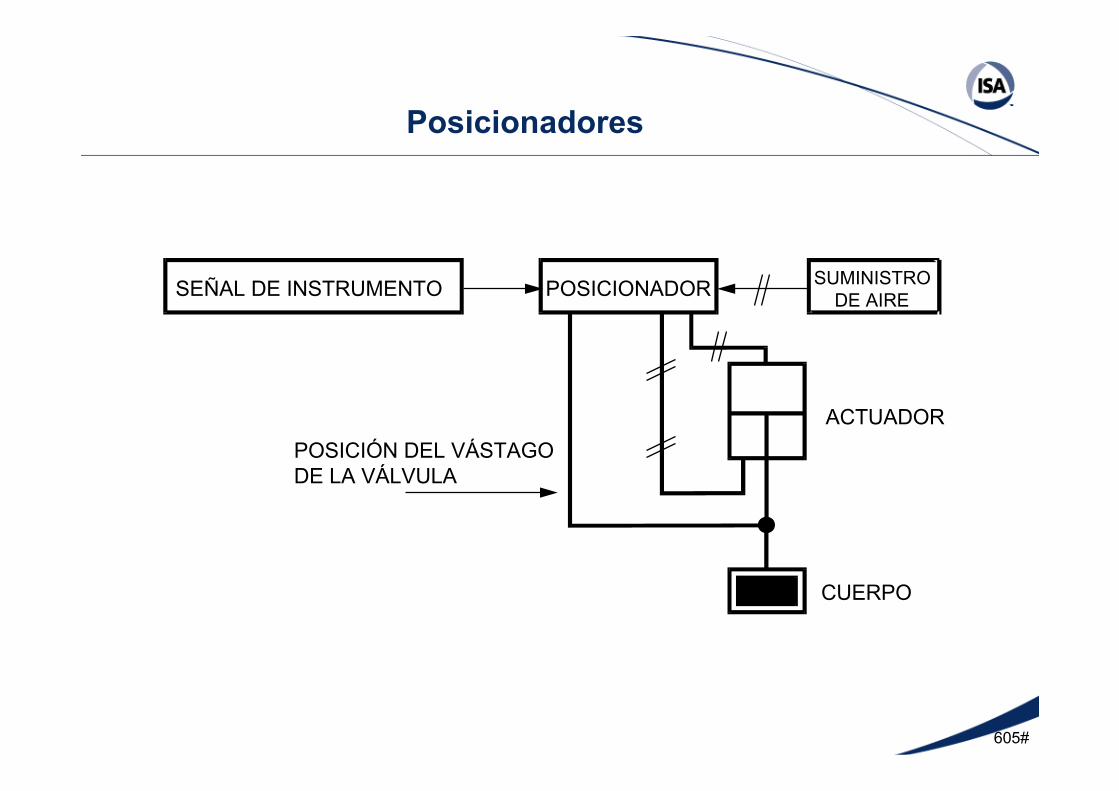
La función de un posicionador de válvula es sensar la señal del instrumento y la posición del vástago de la válvula y asegurar que la válvula se mueve en la posición correcta de acuerdo a la señal del controlador. Se considera como un controlador de lazo cerrado que tiene a la señal del instrumento como la entrada, el suministro de aire como la salida al actuador y retroalimentación desde la posición física del vástago de la válvula.
Los posicionadores pueden:• Incrementar la potencia disponible para mover la válvula.• Invertir la señal a la válvula.• Vencer las fuerzas dentro de una válvula provocadas por
la fricción o la presión alta a través de la válvula.
No todas las válvulas requieren posicionadores. Una válvula con un recipiente de diafragma con resorte puede regular sin él.
605#
SEÑAL DE INSTRUMENTO POSICIONADOR
POSICIÓN DEL VÁSTAGODE LA VÁLVULA
ACTUADOR
CUERPO
SUMINISTRO DE AIRE
Posicionadores
606#
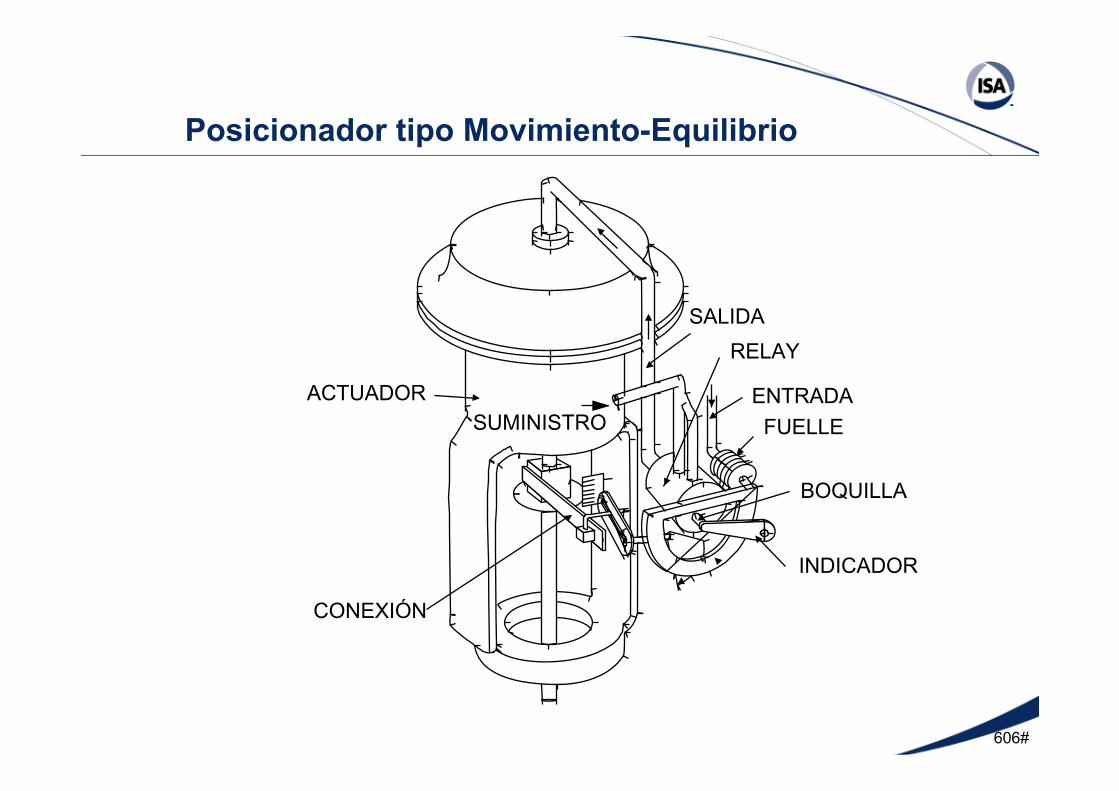
Posicionador tipo Movimiento-Equilibrio
ACTUADOR
CONEXIÓN
SUMINISTRO
SALIDARELAY
ENTRADAFUELLE
BOQUILLA
INDICADOR
607#
Otros elementos finales de control
• Variadores de velocidad• Servomotores• Bombas

608#
Variadores de velocidad
609#
Los convertidores de frecuencia son ideales para múltiples aplicaciones de accionamiento de velocidad variable, como bombas, ventiladores y sistemas de transporte (por ejemplo, bandas transportadoras), entre otras.
Aplicaciones de los variadores de velocidad
610#
1. Control basado en PWM o relación V/F2. Tecnología basada en dispositivos de estado solido (IGBT)3. Microprocesador de control digital 4. Control de corriente de flujo (FCC) para una mejor respuesta Dinámica y
control optimizado del motor 5. Rearranque automático siguiente a estado de falla o falta de red6. Controlador PI para control simple de procesos7. Aceleración/desaceleración programable de 0 s hasta 650 s8. Suavizado de rampa de aceleración/desaceleración 9. Límite de corriente rápido (FCL) para operación libre de fallas 10. Tiempo de respuesta de las entradas digitales rápido y repetitivo11. Ajuste fino de velocidad utilizando una entrada analógica de 10-bits
Características de los variadores de velocidad
611#
Servomotores
Los servos son un tipo especial de motor que se caracterizan por su capacidad para posicionarse de forma inmediata en cualquier posición dentro de su rango de operación. Para ello, el servo espera un tren de pulsos que corresponden con el movimiento a realizar.
Están generalmente formados por un amplificador, un motor, la reducción de engranaje y la retroalimentación, todo en un misma caja de pequeñas dimensiones. El resultado es un servo de posición con un margen de operación de 180° o 360º .
612#
Servomotores
Disponen de tres conexiones electricas: Vcc (roja), GND(negra) y entrada de control (amarilla). Estos colores de identificación y el orden de las conexiones dependen del fabricante del servo. Es importante identificar las conexiones ya que un voltaje de polaridad contraria podría dañar el servo.
613#
Funcionamiento de un Servomotor
El control de un servo se limita a indicar en que posición se debe situar. Estas "ordenes" consisten en una serie de pulsos. La duración del pulso indica el ángulo de giro del motor. Cada servo tiene sus márgenes de operación, que se corresponden con el ancho del pulso máximo y mínimo que el servo entiende. Los valores más generales corresponde con valores entre 1 ms y 2 ms, que dejarían al motor en ambos extremos.
El valor 1,5 ms indica la posición central, mientras que otros valores del pulso lo dejan en posiciones intermedias. Estos valores suelen ser los recomendados, sin embargo, es posible emplear pulsos menores de 1 mso mayores de 2 ms, pudiéndose conseguir ángulos mayores de 180°.

614#
Funcionamiento de un Servomotor
Si se sobrepasan los límites de movimiento del servo, éste comenzará a emitir un zumbido, indicando que se debe cambiar la longitud del pulso.
615#
Funcionamiento de un Servomotor
El periodo entre pulso y pulso no es crítico, e incluso puede ser distinto entre uno y otro pulso. Se suelen emplear valores entre 10 ms y 30 ms. Si el intervalo entre pulso y pulso es inferior al mínimo, puede interferir con la temporización interna del servo, causando un zumbido, y la vibración del brazo de salida. Si es mayor que el máximo, entonces el servo pasará a estado dormido, entre pulsos. Esto provoca que se mueva con intervalos pequeños.
Es importante destacar que para que un servo se mantenga en la misma posición durante un cierto tiempo, es necesario enviarle continuamente el pulso correspondiente. Si se deja de enviar pulsos (o el intervalo entre pulsos es mayor del máximo) entonces el servo perderá fuerza y dejará de intentar mantener su posición, de modo que cualquier fuerza externa podría desplazarlo.





























