Embed Size (px)
Citation preview

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 1/31
Under the guidance of
Mr. T. VENUGOPAL
Assoc. Prof. ECE Department
BY1. 09J81A0424
2. 09J81A0431
3. 09J81A0450

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 2/31
BRIEF OVERVIEW :
Objective
Existing system
Embedded system
What is CAS?
Block Diagram
Power supply
ATmega16 Controller
Obstacle sensor
CAN, MCP2515 and MCP2551
LCD
DC Motor and L293D
Software Requirements
Operation
Advantages, Disadvantages
Future Scope
Conclusion

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 3/31
Objective of the Project :
• This project CAN BASED COLLISION AVOIDANCE
SYSTEM is intended for secure and smooth journey.
• If the driver himself is not concentrating on driving or any
other parameters, which may cause damage to vehicle
as well a life, this intelligent car/ vehicle warn the driver
regarding the danger ahead.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 4/31
Existing system :
• Power train management system
• Antilock braking system (ABS)
• Acceleration skid control (ASC) system, etc,
• The functionality and wiring of these electric control units
(ECU) are getting more complicated.
• A high-level protocol CAN is adopted to interconnect those
CAN nodes with reliable communications among sensors.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 5/31
Embedded system :
An Embedded System is one that has computer
hardware with software embedded in it as one of its
important components.
Its software embeds in ROM (Read Only Memory).
It does not need secondary memories as in a
computer .
SOFTWARE PROGRAM

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 6/31
What is CAS ?
A collision avoidance system is that which is placedwithin a car to warn its driver of any dangers that may lie
ahead on the road.
• how close the car is to other cars surrounding it
• how much its speed needs to be reduced while
going around the curve
• how close the car is to going off the road
• uses visual and audio warnings to prompt the driver
• initiates braking if the driver fails to respond to the
warnings

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 7/31
Block Diagram :
GP2D1
2
ATMEG
A
32
LCD
MCP 2515 MCP 2551
L293D
DC
MOTOR
ATMEG
A
32
LCD
MCP 2515 MCP 2551
NODE 1
NODE 2

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 8/31
Power Supply :
Transformer Rectifier Filter Regulator
230V
AC
Mains
Regulated
5V
DC

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 9/31
ATMEGA 32 CONTROLLER :
• High-performance, Low-power AVR 8 - bit Microcontroller
• Advanced RISC Architecture
• High Endurance Non-volatile Memory segments
• JTAG Interface
• Peripheral Features
• Special Microcontroller Features
• I/O and Packages - 40-pin
• Operating Voltages - 4.5-5.5V
• Speed Grades - 0-16 MHz
• Power Consumption - 1.1mA

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 10/31
Pin Diagram :
7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 11/31
GP2D12 :
• It is an Analog distance sensor that uses infrared to
detect an object between 10 cm and 80 cm away.
• Consists of PSD and infrared emitting diode and
signal processing circuit.
• High immunity to ambient light and colour of object
• No external control circuitry required

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 12/31
GP2D12 :

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 13/31
CONTROL AREA NETWORK :
• CAN is a multi-master broadcast serial bus standard for
connecting electronic control units (ECUs)
• CAN is one of the best choices for embedded networking
applications.
• Each node is able to send and receive messages, but not
simultaneously.
• A message consists primarily of an ID (identifier), which
represents the priority of the message, and up to eight data
bytes.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 14/31
• The devices that are connected by a CAN network are
typically sensors, actuators and other control devices.
• These devices are not connected directly to the bus, but
through a host processor and a CAN controller.
• Bit rates up to 1 Mbit/s are possible at network lengthsbelow
40 m.
• Each node requires a Host processor
CAN controller
Transceiver

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 15/31
MCP2515 :
• It is a stand-alone Controller Area Network (CAN) controller that implements
the CAN specification, version 2.0B
• MCP2515 has two acceptance masks and six acceptance filters that are use
filter out unwanted messages, thereby reducing the host MCUs overhead.
• It is capable of transmitting and receiving both standard and extended data a
remote frames.
• Operates from 2.7V – 5.5V
• It interfaces with microcontrollers (MCUs) via an industry standard Serial
Peripheral Interface ( 10MHz)
• The device consists of three main blocks:
CAN Module ---- Control logic --- SPI Protocol block

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 16/31
MCP2551 :• The MCP2551 is a high-speed CAN, fault-tolerant device that serves as
the
interface between a CAN protocol controller and the physical bus.
• It will operate at speeds of up to 1 Mb/s.
• It converts the digital signals generated by a CAN controller to signals
suitable
for transmission over the bus cabling.
• It also provides a buffer between the CAN controller and the high-voltage
spikes that can be generated on the CAN bus by outside sources.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 17/31
• Protection against damage due to short-circuit conditions (positive or negative battery voltage)
• Protection against high-voltage transients
• Automatic thermal shutdown protection
• Up to 112 nodes can be connected
• High noise immunity due to differential bus Implementation
Features :
7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 18/31
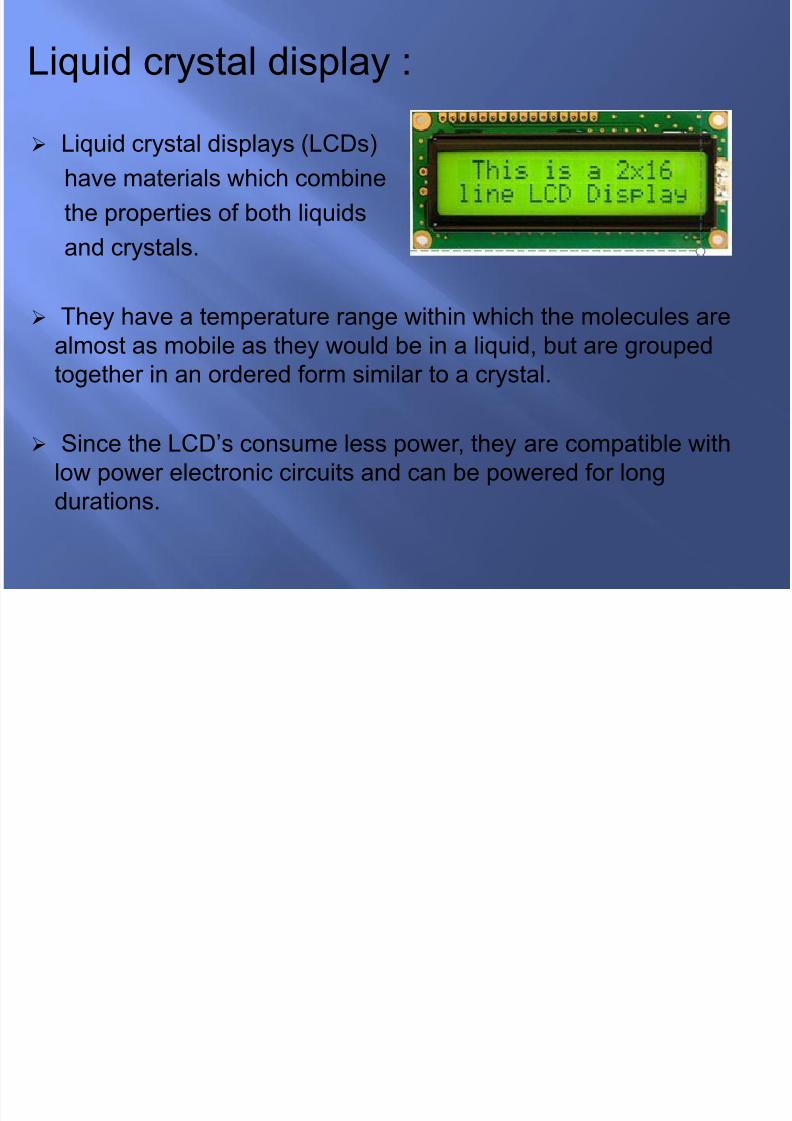
Liquid crystal display :
Liquid crystal displays (LCDs)have materials which combine
the properties of both liquids
and crystals.
They have a temperature range within which the molecules are
almost as mobile as they would be in a liquid, but are grouped
together in an ordered form similar to a crystal.
Since the LCD’s consume less power, they are compatible with
low power electronic circuits and can be powered for long
durations.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 19/31
DC Motor :
• A DC motor is electromechanical device that coverts
electrical
energy into mechanical energy
• Motor gives power to the MCU
• Power to do physical works - to move robot
• It can be controlled easily with microcontrollers
• But the MCUs port are not powerful enough to drive DC
motors directly , we need some kind of drivers.
• Very easy and safe is to use L293D chips

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 20/31
L293D :
L293D is a motor driver integrated circuit (IC).
Motor drivers act as current amplifiers since they take a
low-
current control signal and provide a higher-current signal.
This
higher current signal is used to drive the motors.
This chip is designed to control 2 DC motors
L293D has output current of 600mA
The output supply has a wide range from 4.5V to 36V

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 21/31
Input logic 00 or 11 will
stop the corresponding
motor.
Logic 01 and 10 will
rotate it in clockwise
and anticlockwise
directions.
Enable pins 1 and 9
must be high for
motors to start
operating.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 22/31
PROGRAMMING IN EMBEDDED C
CODEVISION AVR C COMPILER
KEIL SOFTWARE

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 23/31
Embedded C : Embedded C is a set of language extensions for the C Programming language
by the C Standards committee to address commonality issues that existbetween C extensions for different embedded systems.
Historically, embedded C programming requires nonstandard extensions to the
C language in order to support exotic features such as fixed-point arithmetic,
multiple distinct memory banks, and basic I/O operations.
In 2008, the C Standards Committee extended the C language to includes a
number of features not available in normal C, such as, fixed-point arithmetic,
named address spaces, and basic I/O hardware addressing.
Embedded C use most of the syntax and semantics of standard C, e.g., main()
function, variable definition, data type declaration, conditional statements (if,
switch. case), loops (while, for), functions, arrays and strings, structures and
union, bit operations, macros, etc.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 24/31
Codevision AVR :
• CodeVisionAVR is a complete set of tools designed for rapid and
efficient
software development for the Atmel AVR microcontrollers.
Keil C cross compiler :
• Keil Software provides software development tools for the family of
microcontrollers, they are
• IDE (Integrated Development environment)
• Project Manager
• Simulator
• Debugger
• C Cross Compiler , Cross Assembler, Locator/Linker

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 25/31
Compilers are programs used to convert a High Level Language
toobject code i.e source code into object code.
A cross compiler is similar to the compilers but we write a
program
for the target processor (like 8051 and its derivatives) on the
host
processors (like computer)
It means being in one environment you are writing a code for
another
environment is called cross development.
•

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 26/31
OPERATION :•
Here we are having two nodes each node Contain
ATMEGA 16 (AVR CONTROLLER), MCP2515 (CAN CONTROLLER),
MCP2551 (CAN TRANSRECEVER).
• In first node we are interfacing GP2D12 to find the object,
second
node contains DC motor.
• Initially motor is rotating with maximum speed. If any object is
found in front of GP2D12 in node1 motor will stop in node2
by
using CAN protocol.
• For this we have to develop two different application
programs

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 27/31
Collision Mitigation by Braking
Crash avoidance
Road Safety
Injury and Accident Prevention
Commercially marketable technical systems
Low cost
Product Excellence due to MinimumRequirements
High Alert system

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 28/31
The technical challenges for current collision avoidance systemslie in achieving high detection rates given an acceptable falsealarm rate, under real-life driving situations.
The problem with curved roads is that sensors might mistake a carrunning in the opposite direction for a hazard on the lane wherethe CAS equipped vehicle is driving.
Cars Equipped with sensors running inthe opposite direction.

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 29/31
Real Time Applications :

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 30/31
• Future car collision-avoidance systems may be smart phone-
based
• You could stick your cell phone on the dashboard, and it would
use
[its onboard sensors] to provide the feedback needed by the
system
FUTURE SCOPE:

7/28/2019 CAN Based Collision Aviodance System for Automobiles (1) (1)
http://slidepdf.com/reader/full/can-based-collision-aviodance-system-for-automobiles-1-1 31/31
This briefly reviewed the automobile collision avoidance problem
in order to achieve safer transportation on highways.
Once achieved, this will not only save lives, but result in a
considerable amount of financial gains as well.
In order to develop the so-called smart highways and smart cars, it
is stated that the most importance difference from the old practice
is the fact that new design approach attempts to completely avoidcollision instead of minimizing the damage by over-designing
cars.