Embed Size (px)
DESCRIPTION
Calculus (11 ed.Text Book) by Thomas (Ch16+Appendixes) for BSSE
Citation preview

Bismillah hir Rehman nir Raheem ------------------------------------Assalat o Wasalam o Allika Ya RasoolALLAH
To Read Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN
Calculus (11th Ed. Text Book)
Thomas, Weir, Hass, Giordano
Ch�� � Appendixes
Published By: Muhammad Hassan Riaz Yousufi

Muhammad
Hassan
Riaz You
sufi
INTEGRATION IN
VECTOR FIELDS
OVERVIEW This chapter treats integration in vector fields. It is the mathematics thatengineers and physicists use to describe fluid flow, design underwater transmission cables,explain the flow of heat in stars, and put satellites in orbit. In particular, we define lineintegrals, which are used to find the work done by a force field in moving an object along apath through the field. We also define surface integrals so we can find the rate that a fluidflows across a surface. Along the way we develop key concepts and results, such as con-servative force fields and Green’s Theorem, to simplify our calculations of these new inte-grals by connecting them to the single, double, and triple integrals we have already studied.
1143
C h a p t e r
16
Line Integrals
In Chapter 5 we defined the definite integral of a function over a finite closed interval [a, b]on the x-axis. We used definite integrals to find the mass of a thin straight rod, or the workdone by a variable force directed along the x-axis. Now we would like to calculate themasses of thin rods or wires lying along a curve in the plane or space, or to find the workdone by a variable force acting along such a curve. For these calculations we need a moregeneral notion of a “line” integral than integrating over a line segment on the x-axis. Insteadwe need to integrate over a curve C in the plane or in space. These more general integralsare called line integrals, although “curve” integrals might be more descriptive. We makeour definitions for space curves, remembering that curves in the xy-plane are just a specialcase with z-coordinate identically zero.
Suppose that ƒ(x, y, z) is a real-valued function we wish to integrate over the curvelying within the domain of ƒ. The values of ƒ
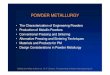
along the curve are given by the composite function ƒ(g(t), h(t), k(t)). We are going to inte-grate this composite with respect to arc length from to To begin, we firstpartition the curve into a finite number n of subarcs (Figure 16.1). The typical subarc haslength In each subarc we choose a point and form the sum
If ƒ is continuous and the functions g, h, and k have continuous first derivatives, then thesesums approach a limit as n increases and the lengths approach zero. We call this limitthe line integral of ƒ over the curve from a to b. If the curve is denoted by a single letter,C for example, the notation for the integral is
(1)LC ƒsx, y, zd ds “The integral of ƒ over C”
¢sk
Sn = an
k = 1ƒsxk, yk, zkd ¢sk .
sxk, yk, zkd¢sk.
t = b.t = a
rstd = gstdi + hstdj + kstdk, a … t … b,
16.1
z
y
x
r(t)
t � b
t � a
(xk, yk, zk)
�sk
FIGURE 16.1 The curve r(t) partitionedinto small arcs from to Thelength of a typical subarc is ¢sk.
t = b.t = a
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1143
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
If ƒ has the constant value 1, then the integral of ƒ over C gives the length of C.
EXAMPLE 1 Evaluating a Line Integral
Integrate over the line segment C joining the origin to the point(1, 1, 1) (Figure 16.2).
Solution We choose the simplest parametrization we can think of:
The components have continuous first derivatives and
is never 0, so the parametrization is smooth. The integral of ƒover C is
= 23L1
0 s2t - 3t2d dt = 23 C t 2
- t3 D01 = 0.
= L1
0 st - 3t 2
+ td23 dt
LC ƒsx, y, zd ds = L
1
0 ƒst, t, td A23 B dt
212+ 12
+ 12= 23
ƒ i + j + k ƒ =ƒ vstd ƒ =
rstd = t i + tj + tk, 0 … t … 1.
ƒsx, y, zd = x - 3y2+ z
If r(t) is smooth for ( is continuous and never 0), we can use theequation
to express ds in Equation (1) as A theorem from advanced calculus saysthat we can then evaluate the integral of ƒ over C as
Notice that the integral on the right side of this last equation is just an ordinary (single)definite integral, as defined in Chapter 5, where we are integrating with respect to theparameter t. The formula evaluates the line integral on the left side correctly no matterwhat parametrization is used, as long as the parametrization is smooth.
LC ƒsx, y, zd ds = L
b
a ƒsgstd, hstd, kstdd ƒ vstd ƒ dt.
ds = ƒ vstd ƒ dt.
sstd = Lb
a ƒ vstd ƒ dt
v = dr>dta … t … b
1144 Chapter 16: Integration in Vector Fields
Equation (3) of Section 13.3with t0 = a
How to Evaluate a Line IntegralTo integrate a continuous function ƒ(x, y, z) over a curve C:
1. Find a smooth parametrization of C,
2. Evaluate the integral as
(2)LC ƒsx, y, zd ds = L
b
a ƒsgstd, hstd, kstdd ƒ vstd ƒ dt.
rstd = gstdi + hstdj + kstdk, a … t … b
z
x
C
(1, 1, 0)
(1, 1, 1)
y
FIGURE 16.2 The integration path inExample 1. Equation (2)
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1144
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiAdditivity
Line integrals have the useful property that if a curve C is made by joining a finite numberof curves end to end, then the integral of a function over C is the sum of theintegrals over the curves that make it up:
(3)
EXAMPLE 2 Line Integral for Two Joined Paths
Figure 16.3 shows another path from the origin to (1, 1, 1), the union of line segments and Integrate over
Solution We choose the simplest parametrizations for and we can think of,checking the lengths of the velocity vectors as we go along:
With these parametrizations we find that
Notice three things about the integrations in Examples 1 and 2. First, as soon as thecomponents of the appropriate curve were substituted into the formula for ƒ, the integra-tion became a standard integration with respect to t. Second, the integral of ƒ over was obtained by integrating ƒ over each section of the path and adding the results. Third,the integrals of ƒ over C and had different values. For most functions, the value ofthe integral along a path joining two points changes if you change the path between them.For some functions, however, the value remains the same, as we will see in Section 16.3.
Mass and Moment Calculations
We treat coil springs and wires like masses distributed along smooth curves in space. Thedistribution is described by a continuous density function (mass per unit length).The spring’s or wire’s mass, center of mass, and moments are then calculated with the for-mulas in Table 16.1. The formulas also apply to thin rods.
dsx, y, zd
C1 ´ C2
C1 ´ C2
= 22 ct 2
2- t 3 d
0
1
+ ct 2
2- 2t d
0
1
= -
222
-
32
.
= L1
0 st - 3t 2
+ 0d22 dt + L1
0 s1 - 3 + tds1d dt
= L1
0 ƒst, t, 0d22 dt + L
1
0 ƒs1, 1, tds1d dt
LC1´C2
ƒsx, y, zd ds = LC1
ƒsx, y, zd ds + LC2
ƒsx, y, zd ds
C2: rstd = i + j + tk, 0 … t … 1; ƒ v ƒ = 202+ 02
+ 12= 1.
C1: rstd = ti + tj, 0 … t … 1; ƒ v ƒ = 212+ 12
= 22
C2C1
C1 ´ C2.ƒsx, y, zd = x - 3y2+ zC2.
C1
LC ƒ ds = LC1
ƒ ds + LC2
ƒ ds +Á
+ LCn
ƒ ds.
C1, C2, Á , Cn
16.1 Line Integrals 1145
z
x
(0, 0, 0)
(1, 1, 0)
(1, 1, 1)
C1
C2y
FIGURE 16.3 The path of integration inExample 2.
Equation (3)
Equation (2)
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1145
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
EXAMPLE 3 Finding Mass, Center of Mass, Moment of Inertia, Radius of Gyration
A coil spring lies along the helix
The spring’s density is a constant, Find the spring’s mass and center of mass, and itsmoment of inertia and radius of gyration about the z-axis.
Solution We sketch the spring (Figure 16.4). Because of the symmetries involved, thecenter of mass lies at the point on the z-axis.
For the remaining calculations, we first find
We then evaluate the formulas from Table 16.1 using Equation (2):
Rz = 2Iz >M = 22p117>s2p117d = 1.
= L2p
0217 dt = 2p217
Iz = 3Helix
sx 2+ y 2dd ds = L
2p
0scos2 4t + sin2 4tds1d217 dt
M = 3Helix
d ds = L2p
0s1d217 dt = 2p217
= 2s -4 sin 4td2+ s4 cos 4td2
+ 1 = 217 .
ƒ vstd ƒ = B adxdtb2
+ adydtb2
+ adzdtb2
ƒ vstd ƒ:s0, 0, pd
d = 1.
rstd = scos 4tdi + ssin 4tdj + tk, 0 … t … 2p.
1146 Chapter 16: Integration in Vector Fields
TABLE 16.1 Mass and moment formulas for coil springs, thin rods, and wires lyingalong a smooth curve C in space
density)
First moments about the coordinate planes:
Coordinates of the center of mass:
Moments of inertia about axes and other lines:
Radius of gyration about a line L: RL = 2IL >M rsx, y, zd = distance from the point sx, y, zd to line L
Iz = LC sx 2
+ y 2d d ds, IL = LC r 2 d ds
Ix = LC s y 2
+ z 2d d ds, Iy = LC sx 2
+ z 2d d ds
x = Myz >M, y = Mxz >M, z = Mxy >M
Myz = LC x d ds, Mxz = LC
y d ds, Mxy = LC z d ds
Mass: M = LC dsx, y, zd ds sd = d(x, y, z) =
y
z
x
(1, 0, 0)
c.m. (0, 0, �)
(1, 0, 2�)
2�
FIGURE 16.4 The helical spring inExample 3.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1146
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiNotice that the radius of gyration about the z-axis is the radius of the cylinder aroundwhich the helix winds.
EXAMPLE 4 Finding an Arch’s Center of Mass
A slender metal arch, denser at the bottom than top, lies along the semicirclein the yz-plane (Figure 16.5). Find the center of the arch’s mass if the
density at the point (x, y, z) on the arch is
Solution We know that and because the arch lies in the yz-plane with itsmass distributed symmetrically about the z-axis. To find we parametrize the circle as
For this parametrization,
The formulas in Table 16.1 then give
With to the nearest hundredth, the center of mass is (0, 0, 0.57).z
z =
Mxy
M=
8 - p2
# 12p - 2
=
8 - p4p - 4
L 0.57.
= Lp
0s2 sin t - sin2 td dt =
8 - p2
Mxy = LC zd ds = LC
zs2 - zd ds = Lp
0ssin tds2 - sin td dt
M = LC d ds = LC
s2 - zd ds = Lp
0s2 - sin tds1d dt = 2p - 2
ƒ vstd ƒ = B adxdtb2
+ adydtb2
+ adzdtb2
= 2s0d2+ s -sin td2
+ scos td2= 1.
rstd = scos tdj + ssin tdk, 0 … t … p.
z ,y = 0x = 0
dsx, y, zd = 2 - z.y2
+ z2= 1, z Ú 0,
16.1 Line Integrals 1147
z
yx
1
1
c.m.
y2 � z2 � 1, z � 0
–1
FIGURE 16.5 Example 4 shows how tofind the center of mass of a circular arch ofvariable density.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1147
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi16.1 Line Integrals 1147
EXERCISES 16.1
Graphs of Vector EquationsMatch the vector equations in Exercises 1–8 with the graphs (a)–(h)given here.a. b.
y
z
x
2
1
y
z
x
1
–1
c. d.
y
z
x
2
2
(2, 2, 2)
y
z
x
1 1
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1147
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufie. f.
g. h.
1.
2.
3.
4.
5.
6.
7.
8.
Evaluating Line Integrals over Space Curves9. Evaluate where C is the straight-line segment
from (0, 1, 0) to (1, 0, 0).
10. Evaluate where C is the straight-linesegment from (0, 1, 1) to (1, 0, 1).
11. Evaluate along the curve
12. Evaluate along the curve
13. Find the line integral of over the straight-line segment from (1, 2, 3) to
14. Find the line integral of overthe curve
15. Integrate over the path from (0, 0, 0)to (1, 1, 1) (Figure 16.6a) given by
C2: rstd = i + j + tk, 0 … t … 1
C1: rstd = ti + t 2j, 0 … t … 1
ƒsx, y, zd = x + 1y - z2
rstd = ti + tj + tk, 1 … t … q.ƒsx, y, zd = 23>sx2
+ y2+ z2d
s0, -1, 1d.ƒsx, y, zd = x + y + z
s4 sin tdj + 3tk, -2p … t … 2p.rstd = s4 cos tdi +1C 2x2
+ y2 ds
t j + s2 - 2tdk, 0 … t … 1.rstd = 2ti +1C sxy + y + zd ds
x = t, y = s1 - td, z = 1,1C sx - y + z - 2d ds
x = t, y = s1 - td, z = 0,1C sx + yd ds
rstd = s2 cos tdi + s2 sin tdk, 0 … t … p
rstd = st2- 1dj + 2tk, -1 … t … 1
rstd = t j + s2 - 2tdk, 0 … t … 1
rstd = ti + tj + tk, 0 … t … 2
rstd = ti, -1 … t … 1
rstd = s2 cos tdi + s2 sin tdj, 0 … t … 2p
rstd = i + j + tk, -1 … t … 1
rstd = ti + s1 - tdj, 0 … t … 1
y
z
x
2
2
–2
y
z
x
2
2
y
z
x
2
–2
–1
y
z
x
11
(1, 1, 1)
(1, 1, –1)
16. Integrate over the path from (0, 0, 0)to (1, 1, 1) (Figure 16.6b) given by
17. Integrate over the path
18. Integrate over the circle
Line Integrals over Plane CurvesIn Exercises 19–22, integrate ƒ over the given curve.
19.
20. from (1, 1 2) to(0, 0)
21. in the first quadrant from(2, 0) to (0, 2)
22. in the first quadrant from(0, 2) to
Mass and Moments23. Mass of a wire Find the mass of a wire that lies along the curve
if the density is
24. Center of mass of a curved wire A wire of densitylies along the curve
Find its center of mass. Then sketch the curveand center of mass together.
25. Mass of wire with variable density Find the mass of a thinwire lying along the curve
if the density is (a) and (b) d = 1.d = 3t0 … t … 1,rstd = 22ti + 22tj + s4 - t2dk,
2tk, -1 … t … 1.rstd = st2
- 1dj +dsx, y, zd = 152y + 2
d = s3>2dt.rstd = st2- 1dj + 2tk, 0 … t … 1,
s12, 12dƒsx, yd = x2
- y, C: x2+ y2
= 4
ƒsx, yd = x + y, C: x2+ y2
= 4
>ƒsx, yd = sx + y2d>21 + x2, C: y = x2>2ƒsx, yd = x3>y, C: y = x2>2, 0 … x … 2
rstd = sa cos tdj + sa sin tdk, 0 … t … 2p.
ƒsx, y, zd = -2x2+ z2
rstd = ti + tj + tk, 0 6 a … t … b.ƒsx, y, zd = sx + y + zd>sx2
+ y2+ z2d
C3: rstd = ti + j + k, 0 … t … 1
C2: rstd = tj + k, 0 … t … 1
C1: rstd = tk, 0 … t … 1
ƒsx, y, zd = x + 1y - z2
1148 Chapter 16: Integration in Vector Fields
z
y
x
(a)(1, 1, 0)
(1, 1, 1)(0, 0, 0)
z
yx
(b)
(0, 0, 0)(1, 1, 1)
(0, 0, 1)(0, 1, 1)
C1
C1
C2
C2
C3
FIGURE 16.6 The paths of integration for Exercises 15 and 16.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1148
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi26. Center of mass of wire with variable density Find the centerof mass of a thin wire lying along the curve
if the density is
27. Moment of inertia and radius of gyration of wire hoop Acircular wire hoop of constant density lies along the circle
in the xy-plane. Find the hoop’s moment of inertiaand radius of gyration about the z-axis.
28. Inertia and radii of gyration of slender rod A slender rod ofconstant density lies along the line segment
in the yz-plane. Find the moments of iner-tia and radii of gyration of the rod about the three coordinate axes.
29. Two springs of constant density A spring of constant density lies along the helix
a. Find and
b. Suppose that you have another spring of constant density that is twice as long as the spring in part (a) and lies along thehelix for Do you expect and for the longerspring to be the same as those for the shorter one, or shouldthey be different? Check your predictions by calculating and for the longer spring.
30. Wire of constant density A wire of constant density liesalong the curve
Find and
31. The arch in Example 4 Find and for the arch in Example 4.RxIx
Rz.z, Iz,
rstd = st cos tdi + st sin tdj + A222>3 B t3>2k, 0 … t … 1.
d = 1
Rz
Iz
RzIz0 … t … 4p.
d
Rz.Iz
rstd = scos tdi + ssin tdj + tk, 0 … t … 2p.
d
s2 - 2tdk, 0 … t … 1,rstd = tj +
x 2+ y 2
= a 2d
d = 315 + t.s2>3dt3>2k, 0 … t … 2,rstd = ti + 2tj +
32. Center of mass, moments of inertia, and radii of gyration forwire with variable density Find the center of mass, and themoments of inertia and radii of gyration about the coordinate axesof a thin wire lying along the curve
if the density is
COMPUTER EXPLORATIONS
Evaluating Line Integrals NumericallyIn Exercises 33–36, use a CAS to perform the following steps to eval-uate the line integrals.
a. Find for the path
b. Express the integrand as a function ofthe parameter t.
c. Evaluate using Equation (2) in the text.
33.
34.
35.
36.
0 … t … 2pt5>2k,
ƒsx, y, zd = a1 +
94
z1>3b1>4; rstd = scos 2tdi + ssin 2tdj +
0 … t … 2pƒsx, y, zd = x1y - 3z2 ; rstd = scos 2tdi + ssin 2tdj + 5tk,
0 … t … 2ƒsx, y, zd = 21 + x3
+ 5y3 ; rstd = ti +
13
t 2j + 1tk, 0 … t … 2ƒsx, y, zd = 21 + 30x2
+ 10y ; rstd = ti + t 2j + 3t 2k, 1C ƒ ds
ƒsgstd, hstd, kstdd ƒ vstd ƒ
kstdk.rstd = gstdi + hstdj +ds = ƒ vstd ƒ dt
d = 1>st + 1d
rstd = ti +
2223
t3>2j +
t2
2 k, 0 … t … 2,
1149
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1149
16.1 Line Integrals
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi16.2 Vector Fields, Work, Circulation, and Flux 1149
Vector Fields, Work, Circulation, and Flux
When we study physical phenomena that are represented by vectors, we replace integralsover closed intervals by integrals over paths through vector fields. We use such integralsto find the work done in moving an object along a path against a variable force (such as avehicle sent into space against Earth’s gravitational field) or to find the work done by avector field in moving an object along a path through the field (such as the work done byan accelerator in raising the energy of a particle). We also use line integrals to find therates at which fluids flow along and across curves.
Vector Fields
Suppose a region in the plane or in space is occupied by a moving fluid such as air or water.Imagine that the fluid is made up of a very large number of particles, and that at any instantof time a particle has a velocity v. If we take a picture of the velocities of some particles at
16.2
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1149
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufidifferent position points at the same instant, we would expect to find that these velocitiesvary from position to position. We can think of a velocity vector as being attached to eachpoint of the fluid. Such a fluid flow exemplifies a vector field. For example, Figure 16.7shows a velocity vector field obtained by attaching a velocity vector to each point of airflowing around an airfoil in a wind tunnel. Figure 16.8 shows another vector field of veloc-ity vectors along the streamlines of water moving through a contracting channel. In additionto vector fields associated with fluid flows, there are vector force fields that are associatedwith gravitational attraction (Figure 16.9), magnetic force fields, electric fields, and evenpurely mathematical fields.
Generally, a vector field on a domain in the plane or in space is a function that assignsa vector to each point in the domain. A field of three-dimensional vectors might have aformula like
The field is continuous if the component functions M, N, and P are continuous,differentiable if M, N, and P are differentiable, and so on. A field of two-dimensional vec-tors might have a formula like
If we attach a projectile’s velocity vector to each point of the projectile’s trajectory in theplane of motion, we have a two-dimensional field defined along the trajectory. If we attachthe gradient vector of a scalar function to each point of a level surface of the function, wehave a three-dimensional field on the surface. If we attach the velocity vector to each pointof a flowing fluid, we have a three-dimensional field defined on a region in space. Theseand other fields are illustrated in Figures 16.10–16.15. Some of the illustrations give for-mulas for the fields as well.
To sketch the fields that had formulas, we picked a representative selection of do-main points and sketched the vectors attached to them. The arrows representing the vec-tors are drawn with their tails, not their heads, at the points where the vector functions are
Fsx, yd = Msx, ydi + Nsx, ydj.
Fsx, y, zd = Msx, y, zdi + Nsx, y, zdj + Psx, y, zdk.
1150 Chapter 16: Integration in Vector Fields
FIGURE 16.8 Streamlines in acontracting channel. The water speeds upas the channel narrows and the velocityvectors increase in length.
FIGURE 16.7 Velocity vectors of a flowaround an airfoil in a wind tunnel. Thestreamlines were made visible by kerosenesmoke.
z
y
x
0
FIGURE 16.9 Vectors in agravitational field point towardthe center of mass that gives thesource of the field.
y
x0
FIGURE 16.10 Thevelocity vectors v(t) of aprojectile’s motion make avector field along thetrajectory.
f (x, y, z) � c
FIGURE 16.11 The field ofgradient vectors on asurface ƒsx, y, zd = c.
§ƒ
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1150
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16.2 Vector Fields, Work, Circulation, and Flux 1151
z
y
x
x2 � y2 � a2
z � a2 � r2
0
FIGURE 16.12 The flow of fluidin a long cylindrical pipe. Thevectors inside thecylinder that have their bases inthe xy-plane have their tips on theparaboloid z = a2
- r2.
v = sa2- r2dk
y
x
FIGURE 16.13 The radial fieldof position vectors of points in
the plane. Notice the convention that anarrow is drawn with its tail, not its head, atthe point where F is evaluated.
F = xi + yj
x
y
FIGURE 16.14 The circumferential or“spin” field of unit vectors
in the plane. The field is not defined at theorigin.
F = s -yi + xjd>sx2+ y2d1>2
WIND SPEED, M/S
0 2 4 6 8 10 12 14 16+
FIGURE 16.15 NASA’s Seasat used radar to take 350,000 wind measurements over theworld’s oceans. The arrows show wind direction; their length and the color contouringindicate speed. Notice the heavy storm south of Greenland.
4100 AWL/Thomas_ch16p1143-1228 9/2/04 3:11 PM Page 1151
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufievaluated. This is different from the way we draw position vectors of planets and projec-tiles, with their tails at the origin and their heads at the planet’s and projectile’s locations.
Gradient Fields
1152 Chapter 16: Integration in Vector Fields
DEFINITION Gradient FieldThe gradient field of a differentiable function ƒ(x, y, z) is the field of gradientvectors
§ƒ =
0ƒ0x i +
0ƒ0y j +
0ƒ0z k.
EXAMPLE 1 Finding a Gradient Field
Find the gradient field of
Solution The gradient field of ƒ is the field
As we will see in Section 16.3, gradient fields are of special importance in engineering,mathematics, and physics.
Work Done by a Force over a Curve in Space
Suppose that the vector field represents aforce throughout a region in space (it might be the force of gravity or an electromagneticforce of some kind) and that
is a smooth curve in the region. Then the integral of the scalar component of F in thedirection of the curve’s unit tangent vector, over the curve is called the work done by Fover the curve from a to b (Figure 16.16).
F # T,
rstd = gstdi + hstdj + kstdk, a … t … b,
F = Msx, y, zdi + Nsx, y, zdj + Psx, y, zdk
F = §ƒ = yzi + xzj + xyk.
ƒsx, y, zd = xyz.
DEFINITION Work over a Smooth CurveThe work done by a force over a smooth curve r(t) from
to is
(1)W = Lt = b
t = a F # T ds.
t = bt = aF = Mi + Nj + Pk
We motivate Equation (1) with the same kind of reasoning we used in Chapter 6 toderive the formula for the work done by a continuous force of magnitudeF(x) directed along an interval of the x-axis. We divide the curve into short segments, applythe (constant-force) formula for work to approximate the work over eachcurved segment, add the results to approximate the work over the entire curve, and calculate
* (distance)
W = 1ba F(x) dx
T
F
A
B t � b
t � a
FIGURE 16.16 The work done by a forceF is the line integral of the scalarcomponent over the smooth curvefrom A to B.
F # T
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1152
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufithe work as the limit of the approximating sums as the segments become shorter and morenumerous. To find exactly what the limiting integral should be, we partition the parameterinterval [a, b] in the usual way and choose a point in each subinterval Thepartition of [a, b] determines (“induces,” we say) a partition of the curve, with the point being the tip of the position vector and being the length of the curve segment
(Figure 16.17).Pk Pk + 1
¢skrstkdPk
[tk, tk + 1].ck
16.2 Vector Fields, Work, Circulation, and Flux 1153
a btk
ck
tk � 1
t � a
Pk(g(tk), h(tk), k(tk))
Pk � 1(g(tk � 1), h(tk � 1), k(tk � 1))
t � ck
t � b
�sk
FIGURE 16.17 Each partition of [a, b] induces a partition ofthe curve rstd = gstdi + hstdj + kstdk.
If the value of F at the point on the curve corresponding to and denotes the curve’s unit tangent vector at this point, then is the scalar component ofF in the direction of T at (Figure 16.18). The work done by F along the curve seg-ment is approximately
The work done by F along the curve from to is approximately
As the norm of the partition of [a, b] approaches zero, the norm of the induced partition ofthe curve approaches zero and these sums approach the line integral
The sign of the number we calculate with this integral depends on the direction in whichthe curve is traversed as t increases. If we reverse the direction of motion, we reverse thedirection of T and change the sign of and its integral.
Table 16.2 shows six ways to write the work integral in Equation (1). Despite their va-riety, the formulas in Table 16.2 are all evaluated the same way. In the table,
is a smooth curve, and
is its differential.
dr =
drdt
dt = dgi + dhj + dkk
hstdj + kstdk = xi + yj + zkrstd = gstdi +
F # T
Lt = b
t = a F # T ds.
an
k = 1Fk
# Tk ¢sk.
t = bt = a
aForce component indirection of motion
b * adistanceapplied
b = Fk# Tk ¢sk.
Pk Pk + 1
t = ck
Fk# Tk
Tkt = ckFk denotes
t � ck
Pk
Tk
Fk . Tk
FkPk�1
FIGURE 16.18 An enlarged view of thecurve segment in Figure 16.17,showing the force and unit tangent vectorsat the point on the curve where t = ck.
Pk Pk + 1
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1153
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
EXAMPLE 2 Finding Work Done by a Variable Force over a Space Curve
Find the work done by over the curve from (0, 0, 0) to (1, 1, 1) (Figure 16.19).
Solution First we evaluate F on the curve:
Then we find dr dt,
Finally, we find and integrate from to
= st3- t4ds2td + st - t6ds3t2d = 2t4
- 2t5+ 3t3
- 3t8 ,
F # drdt
= [st3- t4dj + st - t6dk] # si + 2tj + 3t2kd
t = 1 :t = 0F # dr>dt
drdt
=
ddt
sti + t2j + t3kd = i + 2tj + 3t2k
>(')'*
= st2- t2di + st3
- t4dj + st - t6dk
F = s y - x2di + sz - y2dj + sx - z2dk
ti + t2j + t3k, 0 … t … 1,rstd =F = sy - x2di + sz - y2dj + sx - z2dk
1154 Chapter 16: Integration in Vector Fields
Evaluating a Work IntegralTo evaluate the work integral along a smooth curve r(t), take these steps:
1. Evaluate F on the curve as a function of the parameter t.
2. Find dr dt
3. Integrate from to t = b.t = aF # dr>dt
>
y
z
x
(0, 0, 0)
(1, 1, 0)
(1, 1, 1)
r(t) � ti � t2j � t3k
FIGURE 16.19 The curve in Example 2.
TABLE 16.2 Six different ways to write the work integral
The definition
Compact differential form
Expanded to include dt; emphasizesthe parameter t and velocity vector dr dt
Emphasizes the component functions
Abbreviates the components of r
dt’s canceled; the most common form = Lb
a M dx + N dy + P dz
= Lb
a aM
dxdt
+ N dydt
+ P dzdtb dt
= Lb
a aM
dgdt
+ N dhdt
+ P dkdtb dt
> = Lb
a F # dr
dt dt
= Lt = b
t = a F # dr
W = Lt = b
t = a F # T ds
0
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1154
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiso
Flow Integrals and Circulation for Velocity Fields
Instead of being a force field, suppose that F represents the velocity field of a fluid flow-ing through a region in space (a tidal basin or the turbine chamber of a hydroelectric gen-erator, for example). Under these circumstances, the integral of along a curve in theregion gives the fluid’s flow along the curve.
F # T
= c25 t 5-
26
t 6+
34
t 4-
39
t 9 d0
1
=
2960
.
Work = L1
0 s2t 4
- 2t 5+ 3t 3
- 3t 8d dt
16.2 Vector Fields, Work, Circulation, and Flux 1155
DEFINITIONS Flow Integral, CirculationIf r(t) is a smooth curve in the domain of a continuous velocity field F, the flowalong the curve from to is
(2)
The integral in this case is called a flow integral. If the curve is a closed loop, theflow is called the circulation around the curve.
Flow = Lb
a F # T ds.
t = bt = a
We evaluate flow integrals the same way we evaluate work integrals.
EXAMPLE 3 Finding Flow Along a Helix
A fluid’s velocity field is Find the flow along the helix
Solution We evaluate F on the curve,
and then find dr dt:
Then we integrate from to
= -sin t cos t + t cos t + sin t
F # drdt
= scos tds -sin td + stdscos td + ssin tds1d
t =p2
:t = 0F # sdr>dtd
drdt
= s -sin tdi + scos tdj + k.
>F = xi + zj + yk = scos tdi + tj + ssin tdk
ssin tdj + tk, 0 … t … p>2.rstd = scos tdi +F = xi + zj + yk.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1155
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiso,
EXAMPLE 4 Finding Circulation Around a Circle
Find the circulation of the field around the circle
Solution On the circle, and
Then
gives
Flux Across a Plane Curve
To find the rate at which a fluid is entering or leaving a region enclosed by a smooth curveC in the xy-plane, we calculate the line integral over C of the scalar component ofthe fluid’s velocity field in the direction of the curve’s outward-pointing normal vector.The value of this integral is the flux of F across C. Flux is Latin for flow, but many fluxcalculations involve no motion at all. If F were an electric field or a magnetic field, for in-stance, the integral of would still be called the flux of the field across C.F # n
F # n ,
= ct -
sin2 t2d
0
2p
= 2p .
Circulation = L2p
0 F #
drdt
dt = L2p
0 s1 - sin t cos td dt
-sin t cos t + sin2 t + cos2 tF # drdt
=
drdt
= s -sin tdi + scos tdj .
F = sx - ydi + xj = scos t - sin tdi + scos tdj ,
ssin tdj, 0 … t … 2p.rstd = scos tdi +F = sx - ydi + xj
= ccos2 t2
+ t sin t d0
p>2= a0 +
p2b - a1
2+ 0b =
p2
-12
.
Flow = Lt = b
t = a F #
drdt
dt = Lp>2
0 s -sin t cos t + t cos t + sin td dt
1156 Chapter 16: Integration in Vector Fields
DEFINITION Flux Across a Closed Curve in the PlaneIf C is a smooth closed curve in the domain of a continuous vector field
in the plane and if n is the outward-pointing unit nor-mal vector on C, the flux of F across C is
(3)Flux of F across C = LC F # n ds.
F = Msx, ydi + Nsx, ydj
Notice the difference between flux and circulation. The flux of F across C is the lineintegral with respect to arc length of the scalar component of F in the direction of theF # n,
1(''')'''*
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1156
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
�
outward normal. The circulation of F around C is the line integral with respect to arclength of the scalar component of F in the direction of the unit tangent vector. Fluxis the integral of the normal component of F; circulation is the integral of the tangentialcomponent of F.
To evaluate the integral in Equation (3), we begin with a smooth parametrization
that traces the curve C exactly once as t increases from a to b. We can find the outwardunit normal vector n by crossing the curve’s unit tangent vector T with the vector k. Butwhich order do we choose, or Which one points outward? It depends onwhich way C is traversed as t increases. If the motion is clockwise, points outward;if the motion is counterclockwise, points outward (Figure 16.20). The usual choiceis the choice that assumes counterclockwise motion. Thus, although the valueof the arc length integral in the definition of flux in Equation (3) does not depend onwhich way C is traversed, the formulas we are about to derive for evaluating the integral inEquation (3) will assume counterclockwise motion.
In terms of components,
If then
Hence,
We put a directed circle on the last integral as a reminder that the integration aroundthe closed curve C is to be in the counterclockwise direction. To evaluate this integral, weexpress M, dy, N, and dx in terms of t and integrate from to We do not needto know either n or ds to find the flux.
t = b .t = a
~
LC F # n ds = LC
aM dyds
- N dxdsb ds = FC
M dy - N dx.
F # n = Msx, yd dyds
- Nsx, yd dxds
.
F = Msx, ydi + Nsx, ydj,
n = T * k = adxds
i +
dyds
jb * k =
dyds
i -
dxds
j.
n = T * k,T * k
k * Tk * T?T * k
x = gstd, y = hstd, a … t … b,
F # T,
16.2 Vector Fields, Work, Circulation, and Flux 1157
T
z
y
xk
C
T
z
y
xk
C
For clockwise motion,k � T points outward.
For counterclockwisemotion, T � k pointsoutward.
k � T
T � k
FIGURE 16.20 To find an outward unitnormal vector for a smooth curve C in thexy-plane that is traversed counterclockwiseas t increases, we take Forclockwise motion, we take n = k * T.
n = T * k.
Calculating Flux Across a Smooth Closed Plane Curve
(4)
The integral can be evaluated from any smooth parametrization that traces C counterclockwise exactly once.a … t … b,
x = gstd, y = hstd,
sFlux of F = Mi + Nj across Cd = FC M dy - N dx
EXAMPLE 5 Finding Flux Across a Circle
Find the flux of across the circle in the xy-plane.x2+ y2
= 1F = sx - ydi + xj
4100 AWL/Thomas_ch16p1143-1228 9/2/04 3:11 PM Page 1157
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSolution The parametrization traces the circlecounterclockwise exactly once. We can therefore use this parametrization in Equation (4). With
We find
The flux of F across the circle is Since the answer is positive, the net flow across thecurve is outward. A net inward flow would have given a negative flux.
p.
= L2p
0 cos2 t dt = L
2p
0 1 + cos 2t
2 dt = c t
2+
sin 2t4d
0
2p
= p.
Flux = LC M dy - N dx = L
2p
0 scos2 t - sin t cos t + cos t sin td dt
N = x = cos t, dx = dscos td = -sin t dt,
M = x - y = cos t - sin t, dy = dssin td = cos t dt
rstd = scos tdi + ssin tdj, 0 … t … 2p ,
1158 Chapter 16: Integration in Vector Fields
Equation (4)
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1158
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufi1158 Chapter 16: Integration in Vector Fields
EXERCISES 16.2
Vector and Gradient FieldsFind the gradient fields of the functions in Exercises 1–4.
1.
2.
3.
4.
5. Give a formula for the vector field inthe plane that has the property that F points toward the origin withmagnitude inversely proportional to the square of the distancefrom (x, y) to the origin. (The field is not defined at (0, 0).)
6. Give a formula for the vector field inthe plane that has the properties that at (0, 0) and that atany other point (a, b), F is tangent to the circle
and points in the clockwise direction with magnitude
WorkIn Exercises 7–12, find the work done by force F from (0, 0, 0) to(1, 1, 1) over each of the following paths (Figure 16.21):
a. The straight-line path
b. The curved path
c. The path consisting of the line segment from (0, 0, 0)to (1, 1, 0) followed by the segment from (1, 1, 0) to (1, 1, 1)
7. 8.
9. 10.
11.
12. F = s y + zdi + sz + xdj + sx + ydkF = s3x2
- 3xdi + 3zj + k
F = xyi + yzj + xzkF = 1zi - 2xj + 1yk
F = [1>sx2+ 1d]jF = 3yi + 2xj + 4zk
C3 ´ C4
rstd = ti + t2j + t4k, 0 … t … 1C2:
rstd = ti + tj + tk, 0 … t … 1C1:
ƒ F ƒ = 2a2+ b2.
a2+ b2
x 2+ y 2
=
F = 0F = Msx, ydi + Nsx, ydj
F = Msx, ydi + Nsx, ydjgsx, y, zd = xy + yz + xz
gsx, y, zd = ez- ln sx2
+ y2dƒsx, y, zd = ln2x2
+ y2+ z2
ƒsx, y, zd = sx2+ y2
+ z2d-1>2
In Exercises 13–16, find the work done by F over the curve in thedirection of increasing t.
13.
14.
15.
16.
Line Integrals and Vector Fields in the Plane17. Evaluate along the curve from
to (2, 4).
18. Evaluate counterclockwise aroundthe triangle with vertices (0, 0), (1, 0), and (0, 1).
1C sx - yd dx + sx + yd dy
s -1, 1dy = x21C xy dx + sx + yd dy
rstd = ssin tdi + scos tdj + st>6dk, 0 … t … 2pF = 6zi + y2j + 12xk rstd = ssin tdi + scos tdj + tk, 0 … t … 2pF = zi + xj + yk rstd = scos tdi + ssin tdj + st>6dk, 0 … t … 2pF = 2yi + 3xj + sx + ydk rstd = ti + t2j + tk, 0 … t … 1F = xyi + yj - yzk
z
y
x
(0, 0, 0)
(1, 1, 0)
(1, 1, 1)C1
C2
C3
C4
FIGURE 16.21 The paths from (0, 0, 0)to (1, 1, 1).
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1158
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi19. Evaluate for the vector field along the
curve from (4, 2) to
20. Evaluate for the vector field counter-
clockwise along the unit circle from (1, 0) to (0, 1).
21. Work Find the work done by the force over the straight line from (1, 1) to (2, 3).
22. Work Find the work done by the gradient of counterclockwise around the circle from (2, 0) toitself.
23. Circulation and flux Find the circulation and flux of the fields
around and across each of the following curves.
a. The circle
b. The ellipse
24. Flux across a circle Find the flux of the fields
across the circle
Circulation and FluxIn Exercises 25–28, find the circulation and flux of the field F aroundand across the closed semicircular path that consists of the semicircu-lar arch followed by theline segment
25. 26.
27. 28.
29. Flow integrals Find the flow of the velocity field along each of the following paths from
(1, 0) to in the xy-plane.
a. The upper half of the circle
b. The line segment from (1, 0) to
c. The line segment from (1, 0) to followed by the linesegment from to
30. Flux across a triangle Find the flux of the field F in Exercise 29outward across the triangle with vertices (1, 0), (0, 1),
Sketching and Finding Fields in the Plane31. Spin field Draw the spin field
(see Figure 16.14) along with its horizontal and vertical compo-nents at a representative assortment of points on the circlex2
+ y2= 4.
F = -
y2x2+ y2
i +
x2x2+ y2
j
s -1, 0d.
s -1, 0d.s0, -1ds0, -1ds -1, 0d
x2+ y2
= 1
s -1, 0dsx2
+ y2djsx + ydi -
F =
F = -y2i + x2jF = -yi + xj
F = x2i + y2jF = xi + yj
r2std = ti, -a … t … a.r1std = sa cos tdi + sa sin tdj, 0 … t … p,
rstd = sa cos tdi + sa sin tdj, 0 … t … 2p.
F1 = 2xi - 3yj and F2 = 2xi + sx - ydj
rstd = scos tdi + s4 sin tdj, 0 … t … 2p
rstd = scos tdi + ssin tdj, 0 … t … 2p
F1 = xi + yj and F2 = -yi + xj
x2+ y2
= 4ƒsx, yd = sx + yd2
F = xyi + sy - xdjx2
+ y2= 1
F = yi - xj1C F # dr
s1, -1d .x = y2
F = x2i - yj1C F # T ds 32. Radial field Draw the radial field
(see Figure 16.13) along with its horizontal and vertical compo-nents at a representative assortment of points on the circle
33. A field of tangent vectors
a. Find a field in the xy-plane with theproperty that at any point G is a vector of
magnitude tangent to the circle and pointing in the counterclockwise direction. (The field isundefined at (0, 0).)
b. How is G related to the spin field F in Figure 16.14?
34. A field of tangent vectors
a. Find a field in the xy-plane with theproperty that at any point G is a unit vectortangent to the circle and pointing in theclockwise direction.
b. How is G related to the spin field F in Figure 16.14?
35. Unit vectors pointing toward the origin Find a field in the xy-plane with the property that at each
point F is a unit vector pointing toward the ori-gin. (The field is undefined at (0, 0).)
36. Two “central” fields Find a field inthe xy-plane with the property that at each point F points toward the origin and is (a) the distance from (x, y)to the origin, (b) inversely proportional to the distance from (x, y)to the origin. (The field is undefined at (0, 0).)
Flow Integrals in SpaceIn Exercises 37–40, F is the velocity field of a fluid flowing through aregion in space. Find the flow along the given curve in the direction ofincreasing t.
37.
38.
39.
40.
41. Circulation Find the circulation of around the closed path consisting of the following three curvestraversed in the direction of increasing t:
C3: rstd = ti + s1 - tdj, 0 … t … 1
C2: rstd = j + sp>2ds1 - tdk, 0 … t … 1
C1: rstd = scos tdi + ssin tdj + tk, 0 … t … p>2
F = 2xi + 2zj + 2yk
0 … t … 2prstd = s -2 cos tdi + s2 sin tdj + 2tk, F = -yi + xj + 2k
rstd = scos tdi + ssin tdk, 0 … t … p
F = sx - zdi + xk rstd = 3tj + 4tk, 0 … t … 1
F = x2i + yzj + y2k rstd = ti + t2j + k, 0 … t … 2
F = -4xyi + 8yj + 2k
ƒ F ƒ
sx, yd Z s0, 0d ,F = Msx, ydi + Nsx, ydj
sx, yd Z s0, 0d ,
Msx, ydi + Nsx, ydjF =
x2+ y2
= a2+ b2
sa, bd Z s0, 0d,G = Psx, ydi + Qsx, ydj
x2+ y2
= a2+ b22a2
+ b2
sa, bd Z s0, 0d,G = Psx, ydi + Qsx, ydj
x2+ y2
= 1.
F = xi + yj
16.2 Vector Fields, Work, Circulation, and Flux 1159
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1159
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
42. Zero circulation Let C be the ellipse in which the planemeets the cylinder Show, with-
out evaluating either line integral directly, that the circulation ofthe field around C in either direction is zero.
43. Flow along a curve The field is thevelocity field of a flow in space. Find the flow from (0, 0, 0) to (1, 1, 1) along the curve of intersection of the cylinder andthe plane (Hint: Use as the parameter.)
44. Flow of a gradient field Find the flow of the field
a. Once around the curve C in Exercise 42, clockwise as viewedfrom above
b. Along the line segment from (1, 1, 1) to
Theory and Examples45. Work and area Suppose that ƒ(t) is differentiable and positive for
Let C be the path andIs there any relation between the value of the work integral
LC F # dr
F = yi.a … t … b,rstd = ti + ƒstdj,a … t … b .
s2, 1, -1d,
F = §sxy2z3d:
y
z
x
(1, 1, 1)
y � x2
z � x
t = xz = x .y = x2
F = xyi + yj - yzk
F = xi + yj + zk
x2+ y2
= 12.2x + 3y - z = 0
y
z
x
(1, 0, 0) (0, 1, 0)
0, 1,
C1 C2
C3
�2
and the area of the region bounded by the t-axis, the graph of ƒ,and the lines and Give reasons for your answer.
46. Work done by a radial force with constant magnitude A par-ticle moves along the smooth curve from (a, ƒ(a)) to(b, ƒ(b)). The force moving the particle has constant magnitude kand always points away from the origin. Show that the work doneby the force is
COMPUTER EXPLORATIONS
Finding Work NumericallyIn Exercises 47–52, use a CAS to perform the following steps forfinding the work done by force F over the given path:
a. Find dr for the path
b. Evaluate the force F along the path.
c. Evaluate
47.
48.
49.
50.
51.
52.
0 … t … 2ps2 sin2 t - 1dk, F = sx2ydi +
13
x3j + xyk; rstd = scos tdi + ssin tdj +
rstd = ssin tdi + scos tdj + ssin 2tdk, -p>2 … t … p>2F = s2y + sin xdi + sz2
+ s1>3dcos ydj + x4 k; 1 … t … 4F = 2xyi - y2j + zex k; rstd = - ti + 1tj + 3tk, 0 … t … 2p
rstd = (2 cos t)i + (3 sin t)j + k, sz + xy cos xyzdk; F = s y + yz cos xyzdi + sx2
+ xz cos xyzdj +
0 … t … p
F =
31 + x2 i +
21 + y2 j; rstd = scos tdi + ssin tdj,
0 … t … 2pF = xy6 i + 3xsxy5
+ 2dj; rstd = s2 cos tdi + ssin tdj, LC
F # dr.
rstd = gstdi + hstdj + kstdk.
LC F # T ds = k C sb2
+ sƒsbdd2d1>2- sa2
+ sƒsadd2d1>2 D .
y = ƒsxd
t = b?t = a
1160 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1160
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi1160 Chapter 16: Integration in Vector Fields
Path Independence, Potential Functions, and Conservative Fields
In gravitational and electric fields, the amount of work it takes to move a mass or a chargefrom one point to another depends only on the object’s initial and final positions and noton the path taken in between. This section discusses the notion of path independence ofwork integrals and describes the properties of fields in which work integrals are pathindependent. Work integrals are often easier to evaluate if they are path independent.
16.3
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1160
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiPath Independence
If A and B are two points in an open region D in space, the work done in moving aparticle from A to B by a field F defined on D usually depends on the path taken. For somespecial fields, however, the integral’s value is the same for all paths from A to B.
1 F # dr
16.3 Path Independence, Potential Functions, and Conservative Fields 1161
DEFINITIONS Path Independence, Conservative FieldLet F be a field defined on an open region D in space, and suppose that for any
two points A and B in D the work done in moving from A to B is the same over all paths from A to B. Then the integral is path independentin D and the field F is conservative on D.
1 F # dr1B
A F # dr
DEFINITION Potential FunctionIf F is a field defined on D and for some scalar function ƒ on D, then ƒis called a potential function for F.
F = §ƒ
The word conservative comes from physics, where it refers to fields in which the principleof conservation of energy holds (it does, in conservative fields).
Under differentiability conditions normally met in practice, a field F is conservative ifand only if it is the gradient field of a scalar function ƒ; that is, if and only if forsome ƒ. The function ƒ then has a special name.
F = §ƒ
An electric potential is a scalar function whose gradient field is an electric field. Agravitational potential is a scalar function whose gradient field is a gravitational field, andso on. As we will see, once we have found a potential function ƒ for a field F, we canevaluate all the work integrals in the domain of F over any path between A and B by
(1)
If you think of for functions of several variables as being something like the deriv-ative for functions of a single variable, then you see that Equation (1) is the vectorcalculus analogue of the Fundamental Theorem of Calculus formula
Conservative fields have other remarkable properties we will study as we go along.For example, saying that F is conservative on D is equivalent to saying that the integral ofF around every closed path in D is zero. Naturally, certain conditions on the curves, fields,and domains must be satisfied for Equation (1) to be valid. We discuss these conditionsbelow.
Assumptions in Effect from Now On: Connectivityand Simple Connectivity
We assume that all curves are piecewise smooth, that is, made up of finitely manysmooth pieces connected end to end, as discussed in Section 13.1. We also assume that
Lb
a ƒ¿sxd dx = ƒsbd - ƒsad.
ƒ¿
§ƒ
LB
A F # dr = L
B
A §ƒ # dr = ƒsBd - ƒsAd.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1161
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufithe components of F have continuous first partial derivatives. When thiscontinuity requirement guarantees that the mixed second derivatives of the potentialfunction ƒ are equal, a result we will find revealing in studying conservative fields F.
We assume D to be an open region in space. This means that every point in D is thecenter of an open ball that lies entirely in D. We assume D to be connected, which in anopen region means that every point can be connected to every other point by a smoothcurve that lies in the region. Finally, we assume D is simply connected, which meansevery loop in D can be contracted to a point in D without ever leaving D. (If D consisted ofspace with a line segment removed, for example, D would not be simply connected. Therewould be no way to contract a loop around the line segment to a point without leaving D.)
Connectivity and simple connectivity are not the same, and neither implies the other.Think of connected regions as being in “one piece” and simply connected regions as nothaving any “holes that catch loops.” All of space itself is both connected and simply con-nected. Some of the results in this chapter can fail to hold if applied to domains wherethese conditions do not hold. For example, the component test for conservative fields,given later in this section, is not valid on domains that are not simply connected.
Line Integrals in Conservative Fields
The following result provides a convenient way to evaluate a line integral in a conservativefield. The result establishes that the value of the integral depends only on the endpointsand not on the specific path joining them.
F = §ƒ,
1162 Chapter 16: Integration in Vector Fields
THEOREM 1 The Fundamental Theorem of Line Integrals
1. Let be a vector field whose components are continu-ous throughout an open connected region D in space. Then there exists a dif-ferentiable function ƒ such that
if and only if for all points A and B in D the value of is independentof the path joining A to B in D.
2. If the integral is independent of the path from A to B, its value is
LB
A F # dr = ƒsBd - ƒsAd.
1BA F # dr
F = §ƒ =
0ƒ0x i +
0ƒ0y j +
0ƒ0z k
F = Mi + Nj + Pk
Proof that Implies Path Independence of the Integral Suppose that A and Bare two points in D and that is a smoothcurve in D joining A and B. Along the curve, ƒ is a differentiable function of t and
= §ƒ # adxdt
i +
dydt
j +
dzdt
kb = §ƒ # drdt
= F # drdt
.
dƒdt
=
0ƒ0x
dxdt
+
0ƒ0y
dydt
+
0ƒ0z
dzdt
C: rstd = gstdi + hstdj + kstdk, a … t … b,F = §ƒ
Chain Rule with y = hstd, z = kstd
x = gstd,
Because F = §ƒ
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1162
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTherefore,
Thus, the value of the work integral depends only on the values of ƒ at A and B and not onthe path in between. This proves Part 2 as well as the forward implication in Part 1. Weomit the more technical proof of the reverse implication.
EXAMPLE 1 Finding Work Done by a Conservative Field
Find the work done by the conservative field
along any smooth curve C joining the point A to B
Solution With we have
= -24 + 27 = 3.
= s1ds6ds -4d - s -1ds3ds9d
= xyz ƒ s1,6, -4d - xyz ƒ s-1,3,9d
= ƒsBd - ƒsAd
LB
A F # dr = L
B
A §ƒ # dr
ƒsx, y, zd = xyz,
s1, 6, -4d.s -1, 3, 9d
F = yzi + xzj + xyk = §sxyzd
= ƒsgstd, hstd, kstdd da
b
= ƒsBd - ƒsAd.
LC F # dr = L
t = b
t = a F # dr
dt dt = L
b
a dƒdt
dt
16.3 Path Independence, Potential Functions, and Conservative Fields 1163
F = §ƒ
Fundamental Theorem, Part 2
THEOREM 2 Closed-Loop Property of Conservative FieldsThe following statements are equivalent.
1. around every closed loop in D.
2. The field F is conservative on D.
1 F # dr = 0
Proof that Part 1 Part 2 We want to show that for any two points A and B in D, theintegral of has the same value over any two paths and from A to B. We reversethe direction on to make a path from B to A (Figure 16.22). Together, and make a closed loop C, and
Thus, the integrals over and give the same value. Note that the definition of lineintegral shows that changing the direction along a curve reverses the sign of the lineintegral.
C2C1
LC1
F # dr - LC2
F # dr = LC1
F # dr + L-C2
F # dr = LC F # dr = 0.
-C2C1-C2C2
C2C1F # drQ
A
B
A
B
C1C1
C2
–C2
FIGURE 16.22 If we have two paths fromA to B, one of them can be reversed tomake a loop.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1163
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiProof that Part 2 Part 1 We want to show that the integral of is zero over anyclosed loop C. We pick two points A and B on C and use them to break C into two pieces:
from A to B followed by from B back to A (Figure 16.23). Then
The following diagram summarizes the results of Theorems 1 and 2.
Theorem 1 Theorem 2
Now that we see how convenient it is to evaluate line integrals in conservative fields,two questions remain.
1. How do we know when a given field F is conservative?
2. If F is in fact conservative, how do we find a potential function ƒ (so that )?
Finding Potentials for Conservative Fields
The test for being conservative is the following. Keep in mind our assumption that the do-main of F is connected and simply connected.
F = §f
F = §ƒ on D 3 F conservative 3 FCF # dr = 0
on Dover any closedpath in D
FC F # dr = LC1
F # dr + LC2
F # dr = LB
A F # dr - L
B
A F # dr = 0.
C2C1
F # drQ
1164 Chapter 16: Integration in Vector Fields
A
B
A
B
C2
C1
–C2
C1
FIGURE 16.23 If A and B lie on a loop,we can reverse part of the loop to maketwo paths from A to B.
Component Test for Conservative FieldsLet be a field whose componentfunctions have continuous first partial derivatives. Then, F is conservative if andonly if
(2)0P0y =
0N0z , 0M
0z =
0P0x , and 0N
0x =
0M0y .
F = Msx, y, zdi + Nsx, y, zdj + Psx, y, zdk
Proof that Equations (2) hold if F is conservative There is a potential function ƒ suchthat
Hence,
The others in Equations (2) are proved similarly.
The second half of the proof, that Equations (2) imply that F is conservative, is aconsequence of Stokes’ Theorem, taken up in Section 16.7, and requires our assumptionthat the domain of F be simply connected.
=0
0z a0ƒ0y b =
0N0z .
=
02ƒ
0z 0y
0P0y =
0
0y a0ƒ0z b =
02ƒ
0y 0z
F = Mi + Nj + Pk =
0ƒ0x i +
0ƒ0y j +
0ƒ0z k.
Continuity implies that the mixedpartial derivatives are equal.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1164
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiOnce we know that F is conservative, we usually want to find a potential function forF. This requires solving the equation or
for ƒ. We accomplish this by integrating the three equations
as illustrated in the next example.
EXAMPLE 2 Finding a Potential Function
Show that is conservative and finda potential function for it.
Solution We apply the test in Equations (2) to
and calculate
Together, these equalities tell us that there is a function ƒ with We find ƒ by integrating the equations
(3)
We integrate the first equation with respect to x, holding y and z fixed, to get
We write the constant of integration as a function of y and z because its value may changeif y and z change. We then calculate from this equation and match it with the expres-sion for in Equations (3). This gives
so Therefore, g is a function of z alone, and
We now calculate from this equation and match it to the formula for inEquations (3). This gives
so
hszd =z2
2+ C.
xy +
dhdz
= xy + z, or dhdz
= z,
0ƒ>0z0ƒ>0z
ƒsx, y, zd = ex cos y + xyz + hszd.
0g>0y = 0.
-ex sin y + xz +
0g0y = xz - ex sin y,
0ƒ>0y0ƒ>0y
ƒsx, y, zd = ex cos y + xyz + gsy, zd.
0ƒ0x = ex cos y + yz, 0ƒ
0y = xz - ex sin y, 0ƒ0z = xy + z .
§ƒ = F.
0P0y = x =
0N0z , 0M
0z = y =
0P0x , 0N
0x = -ex sin y + z =
0M0y .
M = ex cos y + yz, N = xz - ex sin y, P = xy + z
F = sex cos y + yzdi + sxz - ex sin ydj + sxy + zdk
0ƒ0x = M, 0ƒ
0y = N, 0ƒ0z = P,
0ƒ0x i +
0ƒ0y j +
0ƒ0z k = Mi + Nj + Pk
§ƒ = F
16.3 Path Independence, Potential Functions, and Conservative Fields 1165
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1165
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiHence,
We have infinitely many potential functions of F, one for each value of C.
EXAMPLE 3 Showing That a Field Is Not Conservative
Show that is not conservative.
Solution We apply the component test in Equations (2) and find immediately that
The two are unequal, so F is not conservative. No further testing is required.
Exact Differential Forms
As we see in the next section and again later on, it is often convenient to express work andcirculation integrals in the “differential” form
mentioned in Section 16.2. Such integrals are relatively easy to evaluate ifis the total differential of a function ƒ. For then
Thus,
just as with differentiable functions of a single variable.
LB
A df = ƒsBd - ƒsAd,
= ƒsBd - ƒsAd.
= LB
A §ƒ # dr
LB
A M dx + N dy + P dz = L
B
A 0ƒ0x dx +
0ƒ0y dy +
0ƒ0z dz
M dx + N dy + P dz
LB
A M dx + N dy + P dz
0P0y =
0
0y scos zd = 0, 0N0z =
0
0z s -zd = -1.
F = s2x - 3di - zj + scos zdk
ƒsx, y, zd = ex cos y + xyz +z2
2+ C.
1166 Chapter 16: Integration in Vector Fields
Theorem 1
DEFINITIONS Exact Differential FormAny expression is a differentialform. A differential form is exact on a domain D in space if
for some scalar function ƒ throughout D.
M dx + N dy + P dz =
0f0x dx +
0ƒ0y dy +
0ƒ0z dz = dƒ
Msx, y, zd dx + Nsx, y, zd dy + Psx, y, zd dz
Notice that if on D, then is the gra-dient field of ƒ on D. Conversely, if then the form is exact.The test for the form’s being exact is therefore the same as the test for F’s being conservative.
M dx + N dy + P dzF = §ƒ,F = Mi + Nj + PkM dx + N dy + P dz = dƒ
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1166
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
EXAMPLE 4 Showing That a Differential Form Is Exact
Show that is exact and evaluate the integral
over the line segment from (1, 1, 1) to
Solution We let and apply the Test for Exactness:
These equalities tell us that is exact, so
for some function ƒ, and the integral’s value is We find ƒ up to a constant by integrating the equations
(4)
From the first equation we get
The second equation tells us that
Hence, g is a function of z alone, and
The third of Equations (4) tells us that
Therefore,
The value of the integral is
ƒs2, 3, -1d - ƒs1, 1, 1d = 2 + C - s5 + Cd = -3.
ƒsx, y, zd = xy + 4z + C.
0ƒ0z = 0 +
dhdz
= 4, or hszd = 4z + C.
ƒsx, y, zd = xy + hszd.
0ƒ0y = x +
0g0y = x, or 0g
0y = 0.
ƒsx, y, zd = xy + gsy, zd.
0ƒ0x = y, 0ƒ
0y = x, 0ƒ0z = 4.
ƒs2, 3, -1d - ƒs1, 1, 1d.
y dx + x dy + 4 dz = dƒ
y dx + x dy + 4 dz
0P0y = 0 =
0N0z , 0M
0z = 0 =
0P0x , 0N
0x = 1 =
0M0y .
M = y, N = x, P = 4
s2, 3, -1d .
Ls2,3, -1d
s1,1,1dy dx + x dy + 4 dz
y dx + x dy + 4 dz
16.3 Path Independence, Potential Functions, and Conservative Fields 1167
Component Test for Exactness of The differential form is exact if and only if
This is equivalent to saying that the field is conservative.F = Mi + Nj + Pk
0P0y =
0N0z , 0M
0z =0P0x , and 0N
0x =0M0y .
M dx + N dy + P dzM dx + N dy + P dz
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1167
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
1168 Chapter 16: Integration in Vector Fields
EXERCISES 16.3
Testing for Conservative FieldsWhich fields in Exercises 1–6 are conservative, and which are not?
1.
2.
3.
4.
5.
6.
Finding Potential FunctionsIn Exercises 7–12, find a potential function ƒ for the field F.
7.
8.
9.
10.
11.
12.
Evaluating Line IntegralsIn Exercises 13–17, show that the differential forms in the integralsare exact. Then evaluate the integrals.
13.
14.
15.
16.
17.
Although they are not defined on all of space the fields associatedwith Exercises 18–22 are simply connected and the Component Testcan be used to show they are conservative. Find a potential functionfor each field and evaluate the integrals as in Example 4.
18. Ls1,p>2,2d
s0,2,1d 2 cos y dx + a1y - 2x sin yb dy +
1z dz
R3,
Ls0,1,1d
s1,0,0d sin y cos x dx + cos y sin x dy + dz
Ls3,3,1d
s0,0,0d 2x dx - y2 dy -
41 + z2 dz
Ls1,2,3d
s0,0,0d 2xy dx + sx2
- z2d dy - 2yz dz
Ls3,5,0d
s1,1,2d yz dx + xz dy + xy dz
Ls2,3, -6d
s0,0,0d 2x dx + 2y dy + 2z dz
a y21 - y2 z2+
1z bk
F =
y
1 + x2 y2 i + a x
1 + x2 y2 +
z21 - y2 z2b j +
asec2sx + yd +
y
y2+ z2 bj +
zy2
+ z2 k
F = sln x + sec2sx + yddi +
F = s y sin zdi + sx sin zdj + sxy cos zdkF = ey + 2zsi + xj + 2xkdF = s y + zdi + sx + zdj + sx + ydkF = 2xi + 3yj + 4zk
F = sex cos ydi - sex sin ydj + zk
F = sz + ydi + zj + sy + xdkF = -yi + xj
F = yi + sx + zdj - yk
F = s y sin zdi + sx sin zdj + sxy cos zdkF = yzi + xzj + xyk
19.
20.
21.
22.
23. Revisiting Example 4 Evaluate the integral
from Example 4 by finding parametric equations for the line seg-ment from (1, 1, 1) to and evaluating the line integralof along the segment. Since F is conservative,the integral is independent of the path.
24. Evaluate
along the line segment C joining (0, 0, 0) to (0, 3, 4).
Theory, Applications, and ExamplesIndependence of path Show that the values of the integrals in Exer-cises 25 and 26 do not depend on the path taken from A to B.
25.
26.
In Exercises 27 and 28, find a potential function for F.
27.
28.
29. Work along different paths Find the work done by over the following paths from
(1, 0, 0) to (1, 0, 1).
a. The line segment
b. The helix
c. The x-axis from (1, 0, 0) to (0, 0, 0) followed by the parabolafrom (0, 0, 0) to (1, 0, 1)
30. Work along different paths Find the work done by over the following
paths from (1, 0, 1) to s1, p>2, 0d.e yzi + sxze yz
+ z cos ydj + sxye yz+ sin ydk
F =
z = x2, y = 0
rstd = scos tdi + ssin tdj + st>2pdk, 0 … t … 2p
x = 1, y = 0, 0 … z … 1
sx2+ ydi + s y2
+ xdj + zezkF =
F = se x lnydi + ae x
y + sin zbj + s y cos zdk
F =
2xy i + a1 - x2
y2 b j
LB
A x dx + y dy + z dz2x2
+ y2+ z2
LB
A z2 dx + 2y dy + 2xz dz
LC x2 dx + yz dy + s y2>2d dz
F = yi + xj + 4ks2, 3, -1d
Ls2,3, -1d
s1,1,1d y dx + x dy + 4 dz
Ls2,2,2d
s-1, -1, -1d 2x dx + 2y dy + 2z dz
x2+ y2
+ z2
Ls2,2,2d
s1,1,1d 1y dx + a1z -
x
y2 b dy -
y
z2 dz
Ls2,1,1d
s1,2,1d s2x ln y - yzd dx + ax2
y - xzb dy - xy dz
Ls1,2,3d
s1,1,1d 3x2 dx +
z2
y dy + 2z ln y dz
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1168
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufia. The line segment
b. The line segment from (1, 0, 1) to the origin followed by theline segment from the origin to
c. The line segment from (1, 0, 1) to (1, 0, 0), followed by thex-axis from (1, 0, 0) to the origin, followed by the parabola
from there to
31. Evaluating a work integral two ways Let and letC be the path in the xy-plane from to (1, 1) that consistsof the line segment from to (0, 0) followed by the linesegment from (0, 0) to (1, 1). Evaluate in two ways.
a. Find parametrizations for the segments that make up C andevaluate the integral.
b. Using as a potential function for F.
32. Integral along different paths Evaluate along the following paths C in the xy-plane.
a. The parabola from (1, 0) to (0, 1)
b. The line segment from to (1, 0)
c. The x-axis from to (1, 0)
d. The astroid counterclockwise from (1, 0) back to (1, 0)
33. a. Exact differential form How are the constants a, b, and crelated if the following differential form is exact?
b. Gradient field For what values of b and c will
be a gradient field?
F = s y2+ 2czxdi + ysbx + czdj + s y2
+ cx2dk
say2+ 2czxd dx + ysbx + czd dy + say2
+ cx2d dz
rstd = scos3 tdi + ssin3 tdj, 0 … t … 2p,
s -1, 0ds -1, pd
y = sx - 1d2
sin y dy1C 2x cos y dx - x2
ƒsx, yd = x3y2
1C F # drs -1, 1d
s -1, 1dF = §sx3y2d
s1, p>2, 0dy = px2>2, z = 0
s1, p>2, 0d
x = 1, y = pt>2, z = 1 - t, 0 … t … 1 34. Gradient of a line integral Suppose that is a conserva-tive vector field and
Show that
35. Path of least work You have been asked to find the path alongwhich a force field F will perform the least work in moving aparticle between two locations. A quick calculation on your partshows F to be conservative. How should you respond? Givereasons for your answer.
36. A revealing experiment By experiment, you find that a forcefield F performs only half as much work in moving an objectalong path from A to B as it does in moving the object alongpath from A to B. What can you conclude about F? Givereasons for your answer.
37. Work by a constant force Show that the work done by a con-stant force field in moving a particle along any
path from A to B is
38. Gravitational field
a. Find a potential function for the gravitational field
b. Let and be points at distance and from the origin.Show that the work done by the gravitational field in part (a)in moving a particle from to is
GmM a 1s2
-
1s1b .
P2P1
s2s1P2P1
F = -GmM xi + yj + zk
sx2+ y2
+ z2d3>2 sG, m, and M are constantsd.
W = F # AB1
.
F = ai + bj + ck
C2
C1
§g = F.
gsx, y, zd = Lsx,y,zd
s0,0,0d F # dr.
F = §ƒ
1169
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1169
16.3 Path Independence, Potential Functions, and Conservative Fields
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi16.4 Green’s Theorem in the Plane 1169
Green’s Theorem in the Plane
From Table 16.2 in Section 16.2, we know that every line integral can be
written as a flow integral If the integral is independent of path, so the field Fis conservative (over a domain satisfying the basic assumptions), we can evaluate theintegral easily from a potential function for the field. In this section we consider how toevaluate the integral if it is not associated with a conservative vector field, but is a flow orflux integral across a closed curve in the xy-plane. The means for doing so is a resultknown as Green’s Theorem, which converts the line integral into a double integral over theregion enclosed by the path.
We frame our discussion in terms of velocity fields of fluid flows because they areeasy to picture. However, Green’s Theorem applies to any vector field satisfying certainmathematical conditions. It does not depend for its validity on the field’s having a partic-ular physical interpretation.
1ba F # T ds.
1C M dx + N dy
16.4
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1169
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiDivergence
We need two new ideas for Green’s Theorem. The first is the idea of the divergence of avector field at a point, sometimes called the flux density of the vector field by physicistsand engineers. We obtain it in the following way.
Suppose that is the velocity field of a fluid flow in theplane and that the first partial derivatives of M and N are continuous at each point of aregion R. Let (x, y) be a point in R and let A be a small rectangle with one corner at (x, y)that, along with its interior, lies entirely in R (Figure 16.24). The sides of the rectangle,parallel to the coordinate axes, have lengths of and The rate at which fluid leavesthe rectangle across the bottom edge is approximately
This is the scalar component of the velocity at (x, y) in the direction of the outward normaltimes the length of the segment. If the velocity is in meters per second, for example, theexit rate will be in meters per second times meters or square meters per second. The ratesat which the fluid crosses the other three sides in the directions of their outward normalscan be estimated in a similar way. All told, we have
Exit Rates: Top:
Bottom:
Right:
Left:
Combining opposite pairs gives
Adding these last two equations gives
We now divide by to estimate the total flux per unit area or flux density for therectangle:
Finally, we let and approach zero to define what we call the flux density of F at thepoint (x, y). In mathematics, we call the flux density the divergence of F. The symbol for itis div F, pronounced “divergence of F” or “div F.”
¢y¢x
Flux across rectangle boundaryrectangle area
L a0M0x +
0N0y b .
¢x¢y
Flux across rectangle boundary L a0M0x +
0N0y b¢x¢y.
Top and bottom: sNsx, y + ¢yd - Nsx, ydd¢x L a0N0y ¢yb¢x
Right and left: sMsx + ¢x, yd - Msx, ydd¢y L a0M0x ¢xb¢y.
Fsx, yd # s - id ¢y = -Msx, yd¢y.
Fsx + ¢x, yd # i ¢y = Msx + ¢x, yd¢y
Fsx, yd # s -jd ¢x = -Nsx, yd¢x
Fsx, y + ¢yd # j ¢x = Nsx, y + ¢yd¢x
Fsx, yd # s -jd ¢x = -Nsx, yd¢x.
¢y.¢x
Fsx, yd = Msx, ydi + Nsx, ydj
1170 Chapter 16: Integration in Vector Fields
A
(x, y � �y) (x � �x, y � �y)�x
�x
�y�y
(x, y) (x � �x, y)
FIGURE 16.24 The rectangle fordefining the divergence (flux density) of a vector field at a point (x, y).
DEFINITION Divergence (Flux Density)The divergence (flux density) of a vector field at the point (x, y) is
(1)div F =0M0x +
0N0y .
F = Mi + Nj
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1170
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiIntuitively, if a gas is expanding at the point the lines of flow would divergethere (hence the name) and, since the gas would be flowing out of a small rectangle about
the divergence of F at would be positive. If the gas were compressing in-stead of expanding, the divergence would be negative (see Figure 16.25).
EXAMPLE 1 Finding Divergence
Find the divergence of
Solution We use the formula in Equation (1):
Spin Around an Axis: The k-Component of Curl
The second idea we need for Green’s Theorem has to do with measuring how a paddlewheel spins at a point in a fluid flowing in a plane region. This idea gives some sense ofhow the fluid is circulating around axes located at different points and perpendicular to theregion. Physicists sometimes refer to this as the circulation density of a vector field F at apoint. To obtain it, we return to the velocity field
and the rectangle A. The rectangle is redrawn here as Figure 16.26.The counterclockwise circulation of F around the boundary of A is the sum of flow
rates along the sides. For the bottom edge, the flow rate is approximately
This is the scalar component of the velocity F(x, y) in the direction of the tangent vector itimes the length of the segment. The rates of flow along the other sides in the counter-clockwise direction are expressed in a similar way. In all, we have
We add opposite pairs to get
Top and bottom:
Right and left:
Adding these last two equations and dividing by gives an estimate of the circulationdensity for the rectangle:
Circulation around rectanglerectangle area
L
0N0x -
0M0y .
¢x¢y
sNsx + ¢x, yd - Nsx, ydd¢y L a0N0x ¢xb¢y.
-sMsx, y + ¢yd - Msx, ydd¢x L - a0M0y ¢yb¢x
Top: Fsx, y + ¢yd # s - id ¢x = -Msx, y + ¢yd¢x
Bottom: Fsx, yd # i ¢x = Msx, yd¢x
Right: Fsx + ¢x, yd # j ¢y = Nsx + ¢x, yd¢y
Left: Fsx, yd # s -jd ¢y = -Nsx, yd¢y.
Fsx, yd # i ¢x = Msx, yd¢x.
Fsx, yd = Msx, ydi + Nsx, ydj
= 2x + x - 2y = 3x - 2y.
div F =0M0x +
0N0y =
0
0x sx2- yd +
0
0y sxy - y2d
Fsx, yd = sx2- ydi + sxy - y2dj.
sx0, y0dsx0, y0d
sx0, y0),
16.4 Green’s Theorem in the Plane 1171
Source:
Sink:
div F (x0, y0) � 0
div F (x0, y0) � 0
A gas expandingat the point (x0, y0).
A gas compressingat the point (x0, y0).
FIGURE 16.25 If a gas is expanding at apoint the lines of flow havepositive divergence; if the gas iscompressing, the divergence is negative.
sx0, y0d,
A
(x, y � �y) (x � �x, y � �y)�x
�x
�y�y
(x, y) (x � �x, y)
FIGURE 16.26 The rectangle fordefining the curl (circulation density) of avector field at a point (x, y).
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1171
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
If water is moving about a region in the xy-plane in a thin layer, then the k-componentof the circulation, or curl, at a point gives a way to measure how fast and in whatdirection a small paddle wheel will spin if it is put into the water at with its axisperpendicular to the plane, parallel to k (Figure 16.27).
EXAMPLE 2 Finding the k-Component of the Curl
Find the k-component of the curl for the vector field
Solution We use the formula in Equation (2):
Two Forms for Green’s Theorem
In one form, Green’s Theorem says that under suitable conditions the outward flux of avector field across a simple closed curve in the plane (Figure 16.28) equals the doubleintegral of the divergence of the field over the region enclosed by the curve. Recall theformulas for flux in Equations (3) and (4) in Section 16.2.
scurl Fd # k =
0N0x -
0M0y =
0
0x sxy - y2d -
0
0y sx2- yd = y + 1.
Fsx, yd = sx2- ydi + sxy - y2dj.
sx0, y0dsx0, y0d
We let and approach zero to define what we call the circulation density of F at thepoint (x, y).
The positive orientation of the circulation density for the plane is the counter-clockwise rotation around the vertical axis, looking downward on the xy-plane from the tipof the (vertical) unit vector k (Figure 16.27). The circulation value is actually the k-component of a more general circulation vector we define in Section 16.7, called the curlof the vector field F. For Green’s Theorem, we need only this k-component.
¢y¢x
1172 Chapter 16: Integration in Vector Fields
k
k
Vertical axis
Vertical axis
(x0, y0)
(x0, y0)
Curl F (x0, y0) . k � 0Counterclockwise circulation
Curl F (x0, y0) . k � 0Clockwise circulation
FIGURE 16.27 In the flow of anincompressible fluid over a plane region,the k-component of the curl measures therate of the fluid’s rotation at a point. The k-component of the curl is positive at pointswhere the rotation is counterclockwise andnegative where the rotation is clockwise.
DEFINITION k-Component of Curl (Circulation Density)The k-component of the curl (circulation density) of a vector field
at the point (x, y) is the scalar
(2)scurl Fd # k =
0N0x -
0M0y .
F = Mi + Nj
Simple
Not simple
Simple
FIGURE 16.28 In proving Green’sTheorem, we distinguish between two kindsof closed curves, simple and not simple.Simple curves do not cross themselves. Acircle is simple but a figure 8 is not.
THEOREM 3 Green’s Theorem (Flux-Divergence or Normal Form)The outward flux of a field across a simple closed curve C equalsthe double integral of div F over the region R enclosed by C.
(3)
Outward flux Divergence integral
FC
F # n ds = FC
M dy - N dx = 6R
a0M0x +
0N0y b dx dy
F = Mi + Nj
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1172
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiIn another form, Green’s Theorem says that the counterclockwise circulation of avector field around a simple closed curve is the double integral of the k-component of thecurl of the field over the region enclosed by the curve. Recall the defining Equation (2)for circulation in Section 16.2.
16.4 Green’s Theorem in the Plane 1173
THEOREM 4 Green’s Theorem (Circulation-Curl or Tangential Form)The counterclockwise circulation of a field around a simpleclosed curve C in the plane equals the double integral of over the re-gion R enclosed by C.
(4)
Counterclockwise circulation Curl integral
FC
F # T ds = FC
M dx + N dy = 6R
a0N0x -
0M0y b dx dy
scurl Fd # kF = Mi + Nj
The two forms of Green’s Theorem are equivalent. Applying Equation (3) to the fieldgives Equation (4), and applying Equation (4) to gives
Equation (3).
Mathematical Assumptions
We need two kinds of assumptions for Green’s Theorem to hold. First, we need conditionson M and N to ensure the existence of the integrals. The usual assumptions are that M, N,and their first partial derivatives are continuous at every point of some open region con-taining C and R. Second, we need geometric conditions on the curve C. It must be simple,closed, and made up of pieces along which we can integrate M and N. The usual assump-tions are that C is piecewise smooth. The proof we give for Green’s Theorem, however,assumes things about the shape of R as well. You can find proofs that are less restrictive inmore advanced texts. First let’s look at examples.
EXAMPLE 3 Supporting Green’s Theorem
Verify both forms of Green’s Theorem for the field
and the region R bounded by the unit circle
Solution We have
0M0x = 1, 0M
0y = -1, 0N0x = 1, 0N
0y = 0.
N = cos t, dy = dssin td = cos t dt,
M = cos t - sin t, dx = dscos td = -sin t dt,
C: rstd = scos tdi + ssin tdj, 0 … t … 2p.
Fsx, yd = sx - ydi + xj
G2 = -Ni + MjG1 = Ni - Mj
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1173
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe two sides of Equation (3) are
The two sides of Equation (4) are
Using Green’s Theorem to Evaluate Line Integrals
If we construct a closed curve C by piecing a number of different curves end to end, theprocess of evaluating a line integral over C can be lengthy because there are so many differentintegrals to evaluate. If C bounds a region R to which Green’s Theorem applies, however, wecan use Green’s Theorem to change the line integral around C into one double integral over R.
EXAMPLE 4 Evaluating a Line Integral Using Green’s Theorem
Evaluate the integral
where C is the square cut from the first quadrant by the lines and
Solution We can use either form of Green’s Theorem to change the line integral into adouble integral over the square.
1. With the Normal Form Equation (3): Taking and C and R as thesquare’s boundary and interior gives
= L1
0 c3xy d
x = 0
x = 1
dy = L1
0 3y dy =
32
y2 d0
1
=
32
.
FC
xy dy - y2 dx = 6R
sy + 2yd dx dy = L1
0 L
1
0 3y dx dy
M = xy, N = y2,
y = 1.x = 1
FC
xy dy - y2 dx,
6R
a0N0x -
0Mdyb dx dy = 6
R
s1 - s -1dd dx dy = 26R
dx dy = 2p.
= L2p
0 s -sin t cos t + 1d dt = 2p
FC
M dx + N dy = Lt = 2p
t = 0 scos t - sin tds -sin t dtd + scos tdscos t dtd
= 6R
dx dy = area inside the unit circle = p.
6R
a0M0x +
0N0y b dx dy = 6
R
s1 + 0d dx dy
= L2p
0 cos2 t dt = p
FC
M dy - N dx = Lt = 2p
t = 0 scos t - sin tdscos t dtd - scos tds -sin t dtd
1174 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1174
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi2. With the Tangential Form Equation (4): Taking and gives the sameresult:
EXAMPLE 5 Finding Outward Flux
Calculate the outward flux of the field across the square bounded bythe lines and
Solution Calculating the flux with a line integral would take four integrations, onefor each side of the square. With Green’s Theorem, we can change the line integral toone double integral. With C the square, and R the square’s interior, wehave
Proof of Green’s Theorem for Special Regions
Let C be a smooth simple closed curve in the xy-plane with the property that lines parallelto the axes cut it in no more than two points. Let R be the region enclosed by C andsuppose that M, N, and their first partial derivatives are continuous at every point of someopen region containing C and R. We want to prove the circulation-curl form of Green’sTheorem,
(5)
Figure 16.29 shows C made up of two directed parts:
For any x between a and b, we can integrate with respect to y from toand obtain
Lƒ2sxd
ƒ1sxd 0M0y dy = Msx, yd d
y = ƒ1sxd
y = ƒ2sxd
= Msx, ƒ2sxdd - Msx, ƒ1sxdd.
y = ƒ2sxdy = ƒ1sxd0M>0y
C1: y = ƒ1sxd, a … x … b, C2: y = ƒ2sxd, b Ú x Ú a.
FC
M dx + N dy = 6R
a0N0x -
0M0y b dx dy.
= L1
-1 s2 + 4yd dy = c2y + 2y2 d
-1
1
= 4.
= L1
-1 L
1
-1 s1 + 2yd dx dy = L
1
-1 cx + 2xy d
x = -1
x = 1
dy
= 6R
a0M0x +
0N0y b dx dy
Flux = FC
F # n ds = FC
M dy - N dx
M = x, N = y2 ,
y = ;1 .x = ;1Fsx, yd = xi + y2j
FC
- y2 dx + xy dy = 6R
s y - s -2ydd dx dy =
32
.
N = xyM = -y2
16.4 Green’s Theorem in the Plane 1175
Green’s Theorem
x
y
a0 x b
R
P2(x, f2(x))C2: y � f2(x)
C1: y � f1(x)P1(x, f1(x))
FIGURE 16.29 The boundary curve C ismade up of the graph of and the graph of y = ƒ2sxd.C2 ,
y = ƒ1sxd,C1 ,
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1175
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWe can then integrate this with respect to x from a to b:
Therefore
(6)
Equation (6) is half the result we need for Equation (5). We derive the other half by integrat-ing first with respect to x and then with respect to y, as suggested by Figure 16.30. Thisshows the curve C of Figure 16.29 decomposed into the two directed parts
and The result of this double integration is
(7)
Summing Equations (6) and (7) gives Equation (5). This concludes the proof.
Extending the Proof to Other Regions
The argument we just gave does not apply directly to the rectangular region in Figure 16.31because the lines and meet the region’s boundary in morethan two points. If we divide the boundary C into four directed line segments, however,
we can modify the argument in the following way.Proceeding as in the proof of Equation (7), we have
(8) = LC2
N dy + LC4
N dy.
= Ld
c Nsb, yd dy + L
c
d Nsa, yd dy
Ld
c L
b
a 0N0x dx dy = L
d
c sNsb, yd - Nsa, ydd dy
C3: y = d, b Ú x Ú a, C4: x = a, d Ú y Ú c,
C1: y = c, a … x … b, C2: x = b, c … y … d
y = dx = a, x = b, y = c ,
FC
N dy = 6R
0N0x dx dy.
C œ
2: x = g2s yd, c … y … d.d Ú y Ú cC œ
1: x = g1s yd, 0N>0x
FC
M dx = 6R
a- 0M0y b dx dy.
= -FC
M dx.
= -LC2
M dx - LC1
M dx
= -La
b Msx, ƒ2sxdd dx - L
b
a Msx, ƒ1sxdd dx
Lb
a L
ƒ2sxd
ƒ1sxd 0M0y dy dx = L
b
a [Msx, ƒ2sxdd - Msx, ƒ1sxdd] dx
1176 Chapter 16: Integration in Vector Fields
R
x
y
c
0
y
d
C'2: x � g2(y)
C'1: x � g1(y)
Q2(g2( y), y)Q1(g1( y), y)
FIGURE 16.30 The boundary curve C ismade up of the graph of and the graph of x = g2syd.C2
œ ,x = g1syd,C1
œ ,
y
x0 a b
c
d
R
C3: y � d
C2C4x � a x � b
C1: y � c
FIGURE 16.31 To prove Green’sTheorem for a rectangle, we divide theboundary into four directed line segments.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1176
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiBecause y is constant along and so we can addto the right-hand side of Equation (8) without changing the equality.
Doing so, we have
(9)
Similarly, we can show that
(10)
Subtracting Equation (10) from Equation (9), we again arrive at
Regions like those in Figure 16.32 can be handled with no greater difficulty. Equation (5)still applies. It also applies to the horseshoe-shaped region R shown in Figure 16.33, as wesee by putting together the regions and and their boundaries. Green’s Theorem ap-plies to and to yielding
When we add these two equations, the line integral along the y-axis from b to a for cancels the integral over the same segment but in the opposite direction for Hence,
where C consists of the two segments of the x-axis from to and from a to b and ofthe two semicircles, and where R is the region inside C.
The device of adding line integrals over separate boundaries to build up an integral overa single boundary can be extended to any finite number of subregions. In Figure 16.34a let
be the boundary, oriented counterclockwise, of the region in the first quadrant.Similarly, for the other three quadrants, is the boundary of the region ByGreen’s Theorem,
(11)
We sum Equation (11) over and get (Figure 16.34b):
(12)Fr=b
sM dx + N dyd + Ir=a
sM dx + N dyd = 6hRi
a0N0x -
0M0y b dx dy.
i = 1, 2, 3, 4,
FCi
M dx + N dy = 6Ri
a0N0x -
0M0y b dx dy.
Ri, i = 2, 3, 4.Ci
R1C1
-a-b
FC
M dx + N dy = 6R
a0N0x -
0M0y b dx dy,
C2.C1
LC2
M dx + N dy = 6R2
a0N0x -
0M0y b dx dy.
LC1
M dx + N dy = 6R1
a0N0x -
0M0y b dx dy
C2, R2,C1, R1
R2R1
FC
M dx + N dy = 6R
a0N0x -
0M0y b dx dy.
Lb
a L
d
c 0M0y dy dx = -F
C
M dx.
Ld
c L
b
a 0N0x dx dy = F
C
N dy.
1C1 N dy = 1C3 N dyC3, 1C1 N dy = 1C3 N dy = 0,C1
16.4 Green’s Theorem in the Plane 1177
y
x0
R
(a)
C
y
x0
R
(b)
C
a b
a
b
FIGURE 16.32 Other regions to whichGreen’s Theorem applies.
y
x0 a b
a
b
C2
C2
R2 R1
C1
C1C2
C1C1C2
–a–b
FIGURE 16.33 A region R that combinesregions and R2.R1
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1177
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEquation (12) says that the double integral of over the annular ring Requals the line integral of over the complete boundary of R in the directionthat keeps R on our left as we progress (Figure 16.34b).
EXAMPLE 6 Verifying Green’s Theorem for an Annular Ring
Verify the circulation form of Green’s Theorem (Equation 4) on the annular ring(Figure 16.35), if
Solution The boundary of R consists of the circle
traversed counterclockwise as t increases, and the circle
traversed clockwise as increases. The functions M and N and their partial derivatives arecontinuous throughout R. Moreover,
so
The integral of over the boundary of R is
The functions M and N in Example 6 are discontinuous at (0, 0), so we cannot applyGreen’s Theorem to the circle and the region inside it. We must exclude the origin. Wedo so by excluding the points interior to
We could replace the circle in Example 6 by an ellipse or any other simple closedcurve K surrounding (Figure 16.36). The result would still be
FK
sM dx + N dyd + ICh
sM dx + N dyd = 6R
a0N0x -
0M0y b dy dx = 0,
Ch
C1
Ch.C1
= 2p - 2p = 0.
= L2p
0 scos2 t + sin2 td dt - L
2p
0 h2scos2 u + sin2 ud
h2 du
3C
M dx + N dy = FC1
x dy - y dx
x2+ y2 + I
Ch
x dy - y dx
x2+ y2
M dx + N dy
6R
a0N0x -
0M0y b dx dy = 6
R
0 dx dy = 0.
=
y2- x2
sx2+ y2d2 =
0N0x ,
0M0y =
sx2+ y2ds -1d + ys2yd
sx2+ y2d2
u
Ch: x = h cos u, y = -h sin u, 0 … u … 2p,
C1: x = cos t, y = sin t, 0 … t … 2p,
M =
-y
x2+ y2 , N =
xx2
+ y2 .
R: h2… x2
+ y2… 1, 0 6 h 6 1
M dx + N dys0N>0xd - s0M>0yd
1178 Chapter 16: Integration in Vector Fields
x
y
a b
R
x
y
(a)
a b
Boundaryof R
(b)
C3
C3
C2
C3
C1
C4
R3 R4
R2 R1
C4
C4
C4C3
C1 C1
C1
C2
C2
C2
0
0
FIGURE 16.34 The annular region Rcombines four smaller regions. In polarcoordinates, for the inner circle,
for the outer circle, and for the region itself.
a … r … br = br = a
x
y
h 1
R
Ch
C1
0
FIGURE 16.35 Green’s Theorem may be applied to the annular region R byintegrating along the boundaries as shown(Example 6).
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1178
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwhich leads to the conclusion that
for any such curve K. We can explain this result by changing to polar coordinates. With
we have
and increases by as we traverse K once counterclockwise.2pu
x dy - y dx
x2+ y2 =
r2scos2 u + sin2 ud dur2 = du,
dx = -r sin u du + cos u dr, dy = r cos u du + sin u dr,
x = r cos u, y = r sin u,
FK
sM dx + N dyd = 2p
16.4 Green’s Theorem in the Plane 1179
x
y
K
Ch
�
0
FIGURE 16.36 The region bounded bythe circle and the curve K.Ch
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1179
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufi16.4 Green’s Theorem in the Plane 1179
EXERCISES 16.4
Verifying Green’s TheoremIn Exercises 1–4, verify the conclusion of Green’s Theorem by evalu-ating both sides of Equations (3) and (4) for the field Take the domains of integration in each case to be the disk
and its bounding circle
1. 2.
3. 4.
Counterclockwise Circulation and Outward FluxIn Exercises 5–10, use Green’s Theorem to find the counterclockwisecirculation and outward flux for the field F and curve C.
5.
C: The square bounded by
6.
C: The square bounded by
7.
C: The triangle bounded by and
8.
C: The triangle bounded by and
9.
C: The right-hand loop of the lemniscate
10.
C: The boundary of the region defined by the polar coordinateinequalities
11. Find the counterclockwise circulation and outward flux of thefield around and over the boundary of the regionenclosed by the curves and in the first quadrant.y = xy = x2
F = xyi + y2j
1 … r … 2, 0 … u … p
F = atan-1 yx b i + ln sx2
+ y2dj
r2= cos 2u
F = sx + ex sin ydi + sx + ex cos ydjy = xy = 0, x = 1 ,
F = sx + ydi - sx2+ y2dj
y = xy = 0, x = 3 ,
F = s y2- x2di + sx2
+ y2djx = 0, x = 1, y = 0, y = 1
F = sx2+ 4ydi + sx + y2dj
x = 0, x = 1, y = 0, y = 1
F = sx - ydi + sy - xdj
F = -x2yi + xy2jF = 2xi - 3yj
F = yiF = -yi + xj
C: r = sa cos tdi + sa sin tdj, 0 … t … 2p.a2R: x2
+ y2…
F = Mi + Nj.
12. Find the counterclockwise circulation and the outward flux of thefield around and over the square cutfrom the first quadrant by the lines and
13. Find the outward flux of the field
across the cardioid
14. Find the counterclockwise circulation of around the boundary of the region that is bounded above
by the curve and below by the curve
WorkIn Exercises 15 and 16, find the work done by F in moving a particleonce counterclockwise around the given curve.
15.
C: The boundary of the “triangular” region in the first quadrantenclosed by the x-axis, the line and the curve
16.
C: The circle
Evaluating Line Integrals in the PlaneApply Green’s Theorem to evaluate the integrals in Exercises 17–20.
17.
C: The triangle bounded by
18.
C: The boundary of 0 … x … p, 0 … y … sin x
FC
s3y dx + 2x dyd
x = 0, x + y = 1, y = 0
FC
sy2 dx + x2 dyd
sx - 2d2+ s y - 2d2
= 4
F = s4x - 2ydi + s2x - 4ydjy = x3x = 1 ,
F = 2xy3i + 4x2y2j
y = x4+ 1.y = 3 - x2
sex>ydjF = s y + ex ln ydi +
r = as1 + cos ud, a 7 0 .
F = a3xy -
x
1 + y2 b i + sex+ tan-1 ydj
y = p>2 .x = p>2F = s -sin ydi + sx cos ydj
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1179
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi19.
C: The circle
20.
C: Any simple closed curve in the plane for which Green’s Theoremholds
Calculating Area with Green’s TheoremIf a simple closed curve C in the plane and the region R it enclosessatisfy the hypotheses of Green’s Theorem, the area of R is given by
FC
s2x + y2d dx + s2xy + 3yd dy
sx - 2d2+ sy - 3d2
= 4
FC
s6y + xd dx + s y + 2xd dy Theory and Examples25. Let C be the boundary of a region on which Green’s Theorem
holds. Use Green’s Theorem to calculate
a.
b.
26. Integral dependent only on area Show that the value of
around any square depends only on the area of the square and noton its location in the plane.
27. What is special about the integral
Give reasons for your answer.
28. What is special about the integral
Give reasons for your answer.
29. Area as a line integral Show that if R is a region in the planebounded by a piecewise-smooth simple closed curve C, then
30. Definite integral as a line integral Suppose that a nonnegativefunction has a continuous first derivative on [a, b]. LetC be the boundary of the region in the xy-plane that is boundedbelow by the x-axis, above by the graph of ƒ, and on the sides bythe lines and Show that
31. Area and the centroid Let A be the area and the x-coordinateof the centroid of a region R that is bounded by a piecewise-smooth simple closed curve C in the xy-plane. Show that
32. Moment of inertia Let be the moment of inertia about they-axis of the region in Exercise 31. Show that
13
FC
x3 dy = -FC
x2y dx =
14
FC
x3 dy - x2y dx = Iy .
Iy
12
FC
x2 dy = -FC
xy dx =
13
FC
x2 dy - xy dx = Ax.
x
Lb
a ƒsxd dx = -F
C
y dx.
x = b.x = a
y = ƒsxd
Area of R = FC
x dy = -FC
y dx.
FC
- y3 dy + x3 dx?
FC
4x3y dx + x4 dy?
FC
xy2 dx + sx2y + 2xd dy
FC
ky dx + hx dy sk and h constantsd.
FC
ƒsxd dx + gsyd dy
1180 Chapter 16: Integration in Vector Fields
Green’s Theorem Area Formula
(13)Area of R =
12F
C
x dy - y dx
The reason is that by Equation (3), run backward,
Use the Green’s Theorem area formula (Equation 13) to find theareas of the regions enclosed by the curves in Exercises 21–24.
21. The circle
22. The ellipse
23. The astroid
24. The curve (seeaccompanying figure).
x
y
0
1
–1
1 2 4
t � 0
t � 0
t � ;�3
t � 0
rstd = t2i + sst3>3d - tdj, -23 … t … 23
rstd = scos3 tdi + ssin3 tdj, 0 … t … 2p
rstd = sa cos tdi + sb sin tdj, 0 … t … 2p
rstd = sa cos tdi + sa sin tdj, 0 … t … 2p
= FC
12
x dy -
12
y dx .
Area of R = 6R
dy dx = 6R
a12
+
12b dy dx
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1180
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi33. Green’s Theorem and Laplace’s equation Assuming that allthe necessary derivatives exist and are continuous, show that ifƒ(x, y) satisfies the Laplace equation
then
for all closed curves C to which Green’s Theorem applies. (Theconverse is also true: If the line integral is always zero, then ƒ sat-isfies the Laplace equation.)
34. Maximizing work Among all smooth simple closed curves inthe plane, oriented counterclockwise, find the one along whichthe work done by
is greatest. (Hint: Where is positive?)
35. Regions with many holes Green’s Theorem holds for a regionR with any finite number of holes as long as the bounding curvesare smooth, simple, and closed and we integrate over each com-ponent of the boundary in the direction that keeps R on our imme-diate left as we go along (Figure 16.37).
scurl Fd # k
F = a14
x2y +
13
y3b i + xj
FC
0ƒ0y dx -
0ƒ0x dy = 0
02ƒ
0x2 +
02ƒ
0y2 = 0,
that does not pass through (0, 0). Use Green’s Theorem toshow that
has two possible values, depending on whether (0, 0) liesinside K or outside K.
36. Bendixson’s criterion The streamlines of a planar fluid floware the smooth curves traced by the fluid’s individual particles.The vectors of the flow’s velocity fieldare the tangent vectors of the streamlines. Show that if the flowtakes place over a simply connected region R (no holes or miss-ing points) and that if throughout R, then none ofthe streamlines in R is closed. In other words, no particle of fluidever has a closed trajectory in R. The criterion iscalled Bendixson’s criterion for the nonexistence of closedtrajectories.
37. Establish Equation (7) to finish the proof of the special case ofGreen’s Theorem.
38. Establish Equation (10) to complete the argument for the exten-sion of Green’s Theorem.
39. Curl component of conservative fields Can anything be saidabout the curl component of a conservative two-dimensional vec-tor field? Give reasons for your answer.
40. Circulation of conservative fields Does Green’s Theorem giveany information about the circulation of a conservative field?Does this agree with anything else you know? Give reasons foryour answer.
COMPUTER EXPLORATIONS
Finding CirculationIn Exercises 41–44, use a CAS and Green’s Theorem to find the coun-terclockwise circulation of the field F around the simple closed curveC. Perform the following CAS steps.
a. Plot C in the xy-plane.
b. Determine the integrand for the curlform of Green’s Theorem.
c. Determine the (double integral) limits of integration fromyour plot in part (a) and evaluate the curl integral for thecirculation.
41. The ellipse
42. The ellipse
43.
C: The boundary of the region defined by (below)and (above)
44.
C: The triangle with vertices (0, 0), (2, 0), and (0, 4)
F = xe y i + 4x2 ln y j, y = 2
y = 1 + x4
F = x-1eyi + sey ln x + 2xdj,
x2
4+
y2
9= 1F = s2x3
- y3di + sx3+ y3dj, C:
x2+ 4y2
= 4F = s2x - ydi + sx + 3ydj, C:
s0N>0xd - s0M>0yd
Mx + Ny Z 0
Mx + Ny Z 0
F = Msx, ydi + Nsx, ydj
FK
§ƒ # n ds
16.4 Green’s Theorem in the Plane 1181
FIGURE 16.37 Green’sTheorem holds forregions with more thanone hole (Exercise 35).
a. Let and let C be the circleEvaluate the flux integral
b. Let K be an arbitrary smooth simple closed curve in the plane
FC
§ƒ # n ds.
x2+ y2
= a2 .ƒsx, yd = ln sx2
+ y2d
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1181
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
1182 Chapter 16: Integration in Vector Fields
Surface Area and Surface Integrals
We know how to integrate a function over a flat region in a plane, but what if the functionis defined over a curved surface? To evaluate one of these so-called surface integrals, werewrite it as a double integral over a region in a coordinate plane beneath the surface(Figure 16.38). Surface integrals are used to compute quantities such as the flow of liquidacross a membrane or the upward force on a falling parachute.
Surface Area
Figure 16.39 shows a surface S lying above its “shadow” region R in a plane beneath it.The surface is defined by the equation If the surface is smooth ( is con-tinuous and never vanishes on S ), we can define and calculate its area as a double integralover R. We assume that this projection of the surface onto its shadow R is one-to-one. Thatis, each point in R corresponds to exactly one point (x, y, z) satisfying
The first step in defining the area of S is to partition the region R into small rectanglesof the kind we would use if we were defining an integral over R. Directly above eachlies a patch of surface that we may approximate by a parallelogram in the
tangent plane to S at a point in This parallelogram in the tangent planeprojects directly onto To be specific, we choose the point lying directlyabove the back corner of as shown in Figure 16.39. If the tangent plane is parallelto R, then will be congruent to Otherwise, it will be a parallelogram whose areais somewhat larger than the area of
Figure 16.40 gives a magnified view of and showing the gradient vectorat and a unit vector p that is normal to R. The figure also shows the angle
between and p. The other vectors in the picture, and lie along the edges of thepatch in the tangent plane. Thus, both and are normal to the tangent plane.
We now need to know from advanced vector geometry that is the areaof the projection of the parallelogram determined by and onto any plane whosenormal is p. (A proof is given in Appendix 8.) In our case, this translates into the statement
To simplify the notation in the derivation that follows, we are now denoting the area of thesmall rectangular region by as well. Likewise, will also denote the area of theportion of the tangent plane directly above this small region.
Now, itself is the area (standard fact about cross products) so this lastequation becomes
1 Same as because andare both normal to the tangent plane
or
or
¢Pk =
¢Ak
ƒ cos gk ƒ
,
¢Pk ƒ cos gk ƒ = ¢Ak
uk * vk§ƒƒ cos gk ƒ¢Pk
('''''''')''''''''*()*('')'*
ƒ uk * vk ƒ ƒ p ƒ ƒ cos sangle between uk * vk and pd ƒ = ¢Ak
¢Pkƒ uk * vk ƒ
¢Pk¢Ak
ƒ suk * vkd # p ƒ = ¢Ak.
vkuk
ƒ suk * vkd # p ƒ
§ƒuk * vk¢Pk
vk,uk§ƒgk
Tk§ƒsxk, yk, zkd¢Pk,¢sk
¢Ak.¢Ak.¢Pk
¢Ak,Ck
Tksxk, yk, zkd¢Ak.¢sk.Tksxk, yk, zkd
¢Pk¢sk¢Ak
¢Ak
ƒsx, y, zd = c.
§ƒƒsx, y, zd = c.
16.5
R
S
The vertical projectionor “shadow” of S on acoordinate plane
Surface f (x, y, z) � c
FIGURE 16.38 As we soon see, theintegral of a function g(x, y, z) over asurface S in space can be calculated byevaluating a related double integral overthe vertical projection or “shadow” of Son a coordinate plane.
S
R
∆Pk
∆�k
f (x, y, z) � c
Tk(xk, yk, zk)
Ck
∆Ak
FIGURE 16.39 A surface S and itsvertical projection onto a plane beneath it.You can think of R as the shadow of S onthe plane. The tangent plane approximates the surface patch above ¢Ak.
¢sk
¢Pk
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1182
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiprovided We will have as long as is not parallel to the groundplane and
Since the patches approximate the surface patches that fit together to makeS, the sum
(1)
looks like an approximation of what we might like to call the surface area of S. It also looksas if the approximation would improve if we refined the partition of R. In fact, the sums onthe right-hand side of Equation (1) are approximating sums for the double integral
(2)
We therefore define the area of S to be the value of this integral whenever it exists. For anysurface we have so
This combines with Equation (2) to give a practical formula for surface area.
1ƒ cos g ƒ
=
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
.
ƒ §ƒ # p ƒ = ƒ §ƒ ƒ ƒ p ƒ ƒ cos g ƒ ,ƒsx, y, zd = c,
6R
1
ƒ cos g ƒ
dA.
a¢Pk = a ¢Ak
ƒ cos gk ƒ
¢sk¢Pk
§ƒ # p Z 0.§ƒcos gk Z 0cos gk Z 0.
16.5 Surface Area and Surface Integrals 1183
p
p
∆ Ak
Ck
vk
uk
Tk
�k�f (xk, yk, zk)
∆Pk
∆�k
FIGURE 16.40 Magnified view from thepreceding figure. The vector (notshown) is parallel to the vector becauseboth vectors are normal to the plane of¢Pk .
§ƒuk * vk
Formula for Surface AreaThe area of the surface over a closed and bounded plane region R is
(3)
where p is a unit vector normal to R and §ƒ # p Z 0.
Surface area = 6R
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA,
ƒsx, y, zd = c
Thus, the area is the double integral over R of the magnitude of divided by themagnitude of the scalar component of normal to R.
We reached Equation (3) under the assumption that throughout R and thatis continuous. Whenever the integral exists, however, we define its value to be the area
of the portion of the surface that lies over R. (Recall that the projection is as-sumed to be one-to-one.)
In the exercises (see Equation 11), we show how Equation (3) simplifies if the surfaceis defined by
EXAMPLE 1 Finding Surface Area
Find the area of the surface cut from the bottom of the paraboloid by theplane
Solution We sketch the surface S and the region R below it in the xy-plane (Figure16.41). The surface S is part of the level surface and R isthe disk in the xy-plane. To get a unit vector normal to the plane of R, we cantake p = k.
x2+ y2
… 4ƒsx, y, zd = x2
+ y2- z = 0,
z = 4.x2
+ y2- z = 0
z = ƒsx, yd.
ƒsx, y, zd = c§f
§ƒ # p Z 0§ƒ
§ƒ
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1183
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiAt any point (x, y, z) on the surface, we have
In the region Therefore,
EXAMPLE 2 Finding Surface Area
Find the area of the cap cut from the hemisphere by the cylin-der (Figure 16.42).
Solution The cap S is part of the level surface It pro-jects one-to-one onto the disk in the xy-plane. The unit vector isnormal to the plane of R.
At any point on the surface,
Therefore,
(4)
What do we do about the z?Since z is the z-coordinate of a point on the sphere, we can express it in terms of x and
y as
z = 22 - x2- y2.
Surface area = 6R
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA = 6R
222
2z dA = 226
R
dAz .
ƒ §ƒ # p ƒ = ƒ §ƒ # k ƒ = ƒ 2z ƒ = 2z .
ƒ §ƒ ƒ = 22x2+ y2
+ z2= 222
§ƒ = 2xi + 2yj + 2zk
ƒsx, y, zd = x2+ y2
+ z2
p = kR: x2+ y2
… 1ƒsx, y, zd = x2
+ y2+ z2
= 2.
x2+ y2
= 1x2
+ y2+ z2
= 2, z Ú 0,
= L2p
0
112
s173>2- 1d du =
p6
A17217 - 1 B . = L
2p
0 c 1
12 s4r2
+ 1d3>2 d0
2
du
= L2p
0 L
2
0 24r2
+ 1 r dr du
= 6x2
+y2…4
24x2+ 4y2
+ 1 dx dy
Surface area = 6R
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA
R, dA = dx dy.
ƒ §ƒ # p ƒ = ƒ §ƒ # k ƒ = ƒ -1 ƒ = 1.
= 24x2+ 4y2
+ 1
ƒ §ƒ ƒ = 2s2xd2+ s2yd2
+ s -1d2
§ƒ = 2xi + 2yj - k
ƒsx, y, zd = x2+ y2
- z
1184 Chapter 16: Integration in Vector Fields
y
z
x
4
S
R0
z � x2 � y2
x2 � y2 � 4
FIGURE 16.41 The area of this parabolicsurface is calculated in Example 1.
Equation (3)
Polar coordinates
z
y
x
S
R0
11
x2 � y2 � z2 � 2
x2 � y2 � 1
FIGURE 16.42 The cap cut from thehemisphere by the cylinder projectsvertically onto the disk in the xy-plane (Example 2).
R: x2+ y2
… 1
Because at points of Sz2
= 2x2
+ y2+
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1184
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWe continue the work of Equation (4) with this substitution:
Surface Integrals
We now show how to integrate a function over a surface, using the ideas just developed forcalculating surface area.
Suppose, for example, that we have an electrical charge distributed over a surfacelike the one shown in Figure 16.43 and that the function g(x, y, z) gives the
charge per unit area (charge density) at each point on S. Then we may calculate the totalcharge on S as an integral in the following way.
We partition the shadow region R on the ground plane beneath the surface intosmall rectangles of the kind we would use if we were defining the surface area of S.Then directly above each lies a patch of surface that we approximate with aparallelogram-shaped portion of tangent plane, (See Figure 16.43.)
Up to this point the construction proceeds as in the definition of surface area, butnow we take an additional step: We evaluate g at and approximate the totalcharge on the surface path by the product The rationale is thatwhen the partition of R is sufficiently fine, the value of g throughout is nearlyconstant and is nearly the same as The total charge over S is then approxi-mated by the sum
If ƒ, the function defining the surface S, and its first partial derivatives are continuous,and if g is continuous over S, then the sums on the right-hand side of the last equation ap-proach the limit
(5)
as the partition of R is refined in the usual way. This limit is called the integral of g overthe surface S and is calculated as a double integral over R. The value of the integral is thetotal charge on the surface S.
As you might expect, the formula in Equation (5) defines the integral of any functiong over the surface S as long as the integral exists.
6R
gsx, y, zd dA
ƒ cos g ƒ
= 6R
g sx, y, zd ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA
Total charge L ag sxk, yk, zkd ¢Pk = a g sxk, yk, zkd ¢Ak
ƒ cos gk ƒ
.
¢sk.¢Pk
¢sk
g sxk, yk, zkd ¢Pk.¢sk
sxk, yk, zkd
¢Pk .¢sk¢Ak
ƒsx, y, zd = c
= 22L2p
0 A22 - 1 B du = 2p A2 - 22 B .
= 22L2p
0 c-s2 - r 2d1>2 d
r = 0
r = 1
du
= 22L2p
0 L
1
0
r dr du22 - r 2
Surface area = 226R
dAz = 22 6
x2+y2
…1
dA22 - x2
- y2
16.5 Surface Area and Surface Integrals 1185
Polar coordinates
S
R
∆Pk
∆�k
f (x, y, z) � c
(xk, yk, zk)
∆Ak
FIGURE 16.43 If we know how anelectrical charge g(x, y, z) is distributedover a surface, we can find the total chargewith a suitably modified surface integral.
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1185
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
The integral in Equation (6) takes on different meanings in different applications. If ghas the constant value 1, the integral gives the area of S. If g gives the mass density of athin shell of material modeled by S, the integral gives the mass of the shell.
We can abbreviate the integral in Equation (6) by writing for s ƒ §ƒ ƒ > ƒ §ƒ # p ƒ d dA.ds
1186 Chapter 16: Integration in Vector Fields
DEFINITION Surface IntegralIf R is the shadow region of a surface S defined by the equation and g is a continuous function defined at the points of S, then the integral of gover S is the integral
(6)
where p is a unit vector normal to R and The integral itself is called asurface integral.
§ƒ # p Z 0.
6R
gsx, y, zd ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA,
ƒsx, y, zd = c,
The Surface Area Differential and the Differential Form for Surface Integrals
(7)
Surface area Differential formuladifferential for surface integrals
ds =
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA 6S
g ds
Surface integrals behave like other double integrals, the integral of the sum of twofunctions being the sum of their integrals and so on. The domain Additivity Property takesthe form
The idea is that if S is partitioned by smooth curves into a finite number of nonoverlappingsmooth patches (i.e., if S is piecewise smooth), then the integral over S is the sum of theintegrals over the patches. Thus, the integral of a function over the surface of a cube is thesum of the integrals over the faces of the cube. We integrate over a turtle shell of weldedplates by integrating one plate at a time and adding the results.
EXAMPLE 3 Integrating Over a Surface
Integrate over the surface of the cube cut from the first octant by theplanes and (Figure 16.44).
Solution We integrate xyz over each of the six sides and add the results. Since onthe sides that lie in the coordinate planes, the integral over the surface of the cube reduces to
6Cube
surface
xyz ds = 6Side A
xyz ds + 6Side B
xyz ds + 6Side C
xyz ds.
xyz = 0
z = 1x = 1, y = 1,g sx, y, zd = xyz
6S
g ds = 6S1
g ds + 6S2
g ds +Á
+ 6Sn
g ds.
1
1
1
0
z
y
xSide B
Side C
Side A
FIGURE 16.44 The cube in Example 3.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1186
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSide A is the surface over the square region in the xy-plane. For this surface and region,
and
Symmetry tells us that the integrals of xyz over sides B and C are also 1 4. Hence,
Orientation
We call a smooth surface S orientable or two-sided if it is possible to define a field n ofunit normal vectors on S that varies continuously with position. Any patch or subportion ofan orientable surface is orientable. Spheres and other smooth closed surfaces in space(smooth surfaces that enclose solids) are orientable. By convention, we choose n on aclosed surface to point outward.
Once n has been chosen, we say that we have oriented the surface, and we call thesurface together with its normal field an oriented surface. The vector n at any point iscalled the positive direction at that point (Figure 16.45).
The Möbius band in Figure 16.46 is not orientable. No matter where you start toconstruct a continuous-unit normal field (shown as the shaft of a thumbtack in the figure),moving the vector continuously around the surface in the manner shown will return it tothe starting point with a direction opposite to the one it had when it started out. The vectorat that point cannot point both ways and yet it must if the field is to be continuous. Weconclude that no such field exists.
Surface Integral for Flux
Suppose that F is a continuous vector field defined over an oriented surface S and that nis the chosen unit normal field on the surface. We call the integral of over S the fluxof F across S in the positive direction. Thus, the flux is the integral over S of the scalarcomponent of F in the direction of n.
F # n
6Cube
surface
xyz ds =14
+14
+14
=
34
.
>6
Side A
xyz ds = 6Rxy
xy dx dy = L1
0 L
1
0 xy dx dy = L
1
0 y2
dy =14
.
xyz = xys1d = xy
ds =
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA =11
dx dy = dx dy
p = k, §ƒ = k, ƒ §ƒ ƒ = 1, ƒ §ƒ # p ƒ = ƒ k # k ƒ = 1
0 … y … 1,Rxy: 0 … x … 1, ƒsx, y, zd = z = 1
16.5 Surface Area and Surface Integrals 1187
n Positivedirection
FIGURE 16.45 Smooth closed surfacesin space are orientable. The outward unitnormal vector defines the positivedirection at each point.
d c
a bStart
Finishd b
ca
FIGURE 16.46 To make a Möbius band,take a rectangular strip of paper abcd, givethe end bc a single twist, and paste theends of the strip together to match a with cand b with d. The Möbius band is anonorientable or one-sided surface.
DEFINITION FluxThe flux of a three-dimensional vector field F across an oriented surface S in thedirection of n is
(8)Flux = 6S
F # n ds.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1187
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe definition is analogous to the flux of a two-dimensional field F across a planecurve C. In the plane (Section 16.2), the flux is
the integral of the scalar component of F normal to the curve.If F is the velocity field of a three-dimensional fluid flow, the flux of F across S is the
net rate at which fluid is crossing S in the chosen positive direction. We discuss such flowsin more detail in Section 16.7.
If S is part of a level surface then n may be taken to be one of the twofields
(9)
depending on which one gives the preferred direction. The corresponding flux is
(8)
(10)
EXAMPLE 4 Finding Flux
Find the flux of outward through the surface S cut from the cylinderby the planes and
Solution The outward normal field on S (Figure 16.47) may be calculated from thegradient of to be
With we also have
We can drop the absolute value bars because on S.The value of on the surface is
Therefore, the flux of F outward through S is
6S
F # n ds = 6S
szd a1z dAb = 6Rxy
dA = areasRxyd = 2.
= z.
= y 2z + z 3= zs y 2
+ z 2d
F # n = syzj + z2kd # s yj + zkd
F # nz Ú 0
ds =
ƒ §g ƒ
ƒ §g # k ƒ
dA =2
ƒ 2z ƒ
dA =1z dA.
p = k,
n = +
§g
ƒ §g ƒ
=
2yj + 2zk24y2+ 4z2
=
2yj + 2zk
221= yj + zk.
gsx, y, zd = y2+ z2
x = 1.x = 0y2+ z2
= 1, z Ú 0,F = yzj + z2k
= 6R
F #; §g
ƒ §g # p ƒ
dA.
= 6R
aF #; §g
ƒ §g ƒ
b ƒ §g ƒ
ƒ §g # p ƒ
dA
Flux = 6S
F # n ds
n = ;
§g
ƒ §g ƒ
,
gsx, y, zd = c,
3C
F # n ds,
1188 Chapter 16: Integration in Vector Fields
Equations (9) and (7)
y2+ z2
= 1 on S
(1, 1, 0)x
y
z
n
1
(1, –1, 0)
Rxy
y2 � z2 � 1
FIGURE 16.47 Calculating the flux of avector field outward through this surface.The area of the shadow region is 2(Example 4).
Rxy
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1188
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiMoments and Masses of Thin Shells
Thin shells of material like bowls, metal drums, and domes are modeled with surfaces.Their moments and masses are calculated with the formulas in Table 16.3.
16.5 Surface Area and Surface Integrals 1189
TABLE 16.3 Mass and moment formulas for very thin shells
Mass:
First moments about the coordinate planes:
Coordinates of center of mass:
Moments of inertia about coordinate axes:
Radius of gyration about a line L: RL = 2IL >Mrsx, y, zd = distance from point sx, y, zd to line L
Iz = 6S
sx2+ y 2d d ds, IL = 6
S
r 2d ds,
Ix = 6S
s y2+ z2d d ds, Iy = 6
S
sx 2+ z 2d d ds,
x = Myz >M, y = Mxz >M, z = Mxy >M
Myz = 6S
x d ds, Mxz = 6S
y d ds, Mxy = 6S
z d ds
M = 6S
dsx, y, zd ds sdsx, y, zd = density at sx, y, zd,
EXAMPLE 5 Finding Center of Mass
Find the center of mass of a thin hemispherical shell of radius a and constant density
Solution We model the shell with the hemisphere
(Figure 16.48). The symmetry of the surface about the z-axis tells us that It re-mains only to find from the formula
The mass of the shell is
To evaluate the integral for we take and calculate
ds =
ƒ §ƒ ƒ
ƒ §ƒ # p ƒ
dA =
az dA.
ƒ §ƒ # p ƒ = ƒ §ƒ # k ƒ = ƒ 2z ƒ = 2z
ƒ §ƒ ƒ = ƒ 2xi + 2yj + 2zk ƒ = 22x2+ y2
+ z2= 2a
p = kMxy,
M = 6S
d ds = d6S
ds = sddsarea of Sd = 2pa2d.
z = Mxy >M.zx = y = 0.
ƒsx, y, zd = x2+ y2
+ z2= a2, z Ú 0
d.
z
x
y
c.m. S
Ra
a
x2 � y2 � z2 � a2
x2 � y2 � a2
0, 0,
a2
FIGURE 16.48 The center of mass of athin hemispherical shell of constant densitylies on the axis of symmetry halfway fromthe base to the top (Example 5).
mass per unit area)
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1189
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThen
The shell’s center of mass is the point (0, 0, a 2).> z =
Mxy
M=
pa3d
2pa2d=
a2
.
Mxy = 6S
zd ds = d6R
z az dA = da6
R
dA = daspa2d = dpa3
1190 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1190
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufi1190 Chapter 16: Integration in Vector Fields
EXERCISES 16.5
Surface Area1. Find the area of the surface cut from the paraboloid
by the plane
2. Find the area of the band cut from the paraboloid by the planes and
3. Find the area of the region cut from the plane by the cylinder whose walls are and
4. Find the area of the portion of the surface that liesabove the triangle bounded by the lines and
in the xy-plane.
5. Find the area of the surface that lies above thetriangle bounded by the lines and in the xy-plane.
6. Find the area of the cap cut from the sphere by
the cone
7. Find the area of the ellipse cut from the plane (c a con-stant) by the cylinder
8. Find the area of the upper portion of the cylinder that lies between the planes and
9. Find the area of the portion of the paraboloid that lies above the ring in the yz-plane.
10. Find the area of the surface cut from the paraboloid by the plane
11. Find the area of the surface abovethe square in the xy-plane.
12. Find the area of the surface above thesquare in the xy-plane.
Surface Integrals13. Integrate over the surface of the cube cut
from the first octant by the planes x = a, y = a, z = a.gsx, y, zd = x + y + z
R: 0 … x … 1, 0 … y … 1,2x3>2
+ 2y3>2- 3z = 0
R: 1 … x … 2, 0 … y … 1,x2
- 2 ln x + 215y - z = 0
y = 0.2x2
+ y + z2=
1 … y2+ z2
… 4x = 4 - y2
- z2
y = ;1>2.x = ;1>2x2
+ z2= 1
x2+ y2
= 1.z = cx
z = 2x2+ y2.
x2+ y2
+ z2= 2
y = 3xx = 2, y = 0,x2
- 2y - 2z = 0
y = xx = 23, y = 0,x2
- 2z = 0
x = 2 - y2.x = y2x + 2y + 2z = 5
z = 6.z = 20x2
+ y2- z =
z = 2.0x2
+ y2- z =
14. Integrate over the surface of the wedge in thefirst octant bounded by the coordinate planes and the planes
and
15. Integrate over the surface of the rectangular solidcut from the first octant by the planes and
16. Integrate over the surface of the rectangular solidbounded by the planes and
17. Integrate over the portion of the planethat lies in the first octant.
18. Integrate over the surface cut from theparabolic cylinder by the planes and
Flux Across a SurfaceIn Exercises 19 and 20, find the flux of the field F across the portionof the given surface in the specified direction.
19.
S: rectangular surfacedirection k
20.
S: rectangular surfacedirection
In Exercises 21–26, find the flux of the field F across the portion ofthe sphere in the first octant in the direction awayfrom the origin.
21. 22.
23. 24.
25.
26. Fsx, y, zd =
xi + yj + zk2x2+ y2
+ z2
Fsx, y, zd = xi + yj + zk
Fsx, y, zd = zxi + zyj + z2kFsx, y, zd = yi - xj + k
Fsx, y, zd = -yi + xjFsx, y, zd = zk
x2+ y2
+ z2= a2
-jy = 0, -1 … x … 2, 2 … z … 7,
Fsx, y, zd = yx2i - 2j + xzk
z = 0, 0 … x … 2, 0 … y … 3,
Fsx, y, zd = - i + 2j + 3k
z = 0.x = 0, x = 1,y2
+ 4z = 16gsx, y, zd = x2y2
+ 4
2x + 2y + z = 2gsx, y, zd = x + y + z
z = ;c.x = ;a, y = ;b,gsx, y, zd = xyz
z = c.x = a, y = b,gsx, y, zd = xyz
y + z = 1.x = 2
gsx, y, zd = y + z
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1190
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi27. Find the flux of the field outwardthrough the surface cut from the parabolic cylinder by the planes and
28. Find the flux of the field outward(away from the z-axis) through the surface cut from the bottom ofthe paraboloid by the plane
29. Let S be the portion of the cylinder in the first octant thatprojects parallel to the x-axis onto the rectangle
in the yz-plane (see the accompanying figure). Let nbe the unit vector normal to S that points away from the yz-plane.Find the flux of the field across Sin the direction of n.
30. Let S be the portion of the cylinder in the first octantwhose projection parallel to the y-axis onto the xz-plane is the rec-tangle Let n be the unit vector nor-mal to S that points away from the xz-plane. Find the flux of
through S in the direction of n.
31. Find the outward flux of the field across the surface of the cube cut from the first octant by theplanes
32. Find the outward flux of the field across thesurface of the upper cap cut from the solid sphere
by the plane
Moments and Masses33. Centroid Find the centroid of the portion of the sphere
that lies in the first octant.
34. Centroid Find the centroid of the surface cut from the cylinderby the planes and (resembles
the surface in Example 4).
35. Thin shell of constant density Find the center of mass and themoment of inertia and radius of gyration about the z-axis of a thinshell of constant density cut from the cone by the planes and
36. Conical surface of constant density Find the moment of iner-tia about the z-axis of a thin shell of constant density cut fromthe cone by the circular cylinder
(see the accompanying figure).x2+ y2
= 2x4x2
+ 4y2- z2
= 0, z Ú 0,d
z = 2,z = 1x2
+ y2- z2
= 0d
x = 3x = 0y2+ z2
= 9, z Ú 0,
x2+ y2
+ z2= a2
z = 3.x2+ y2
+ z2… 25
F = xzi + yzj + k
x = a, y = a, z = a.
F = 2xyi + 2yzj + 2xzk
F = 2yj + zk
Rxz: 1 … x … e, 0 … z … 1.
y = ln x
z
yx
1
1
2Sy � e x
Ryz
Fsx, y, zd = -2i + 2yj + zk
0 … z … 1Ryz: 1 … y … 2,
y = ex
z = 1.z = x2+ y2
Fsx, y, zd = 4xi + 4yj + 2k
z = 0.x = 0, x = 1,z = 4 - y2
Fsx, y, zd = z2i + xj - 3zk
37. Spherical shells
a. Find the moment of inertia about a diameter of a thinspherical shell of radius a and constant density (Work witha hemispherical shell and double the result.)
b. Use the Parallel Axis Theorem (Exercises 15.5) and the resultin part (a) to find the moment of inertia about a line tangentto the shell.
38. a. Cones with and without ice cream Find the centroid of thelateral surface of a solid cone of base radius a and height h(cone surface minus the base).
b. Use Pappus’s formula (Exercises 15.5) and the result in part(a) to find the centroid of the complete surface of a solid cone(side plus base).
c. A cone of radius a and height h is joined to a hemisphere ofradius a to make a surface S that resembles an ice creamcone. Use Pappus’s formula and the results in part (a) andExample 5 to find the centroid of S. How high does the conehave to be to place the centroid in the plane shared by thebases of the hemisphere and cone?
Special Formulas for Surface AreaIf S is the surface defined by a function that has continu-ous first partial derivatives throughout a region in the xy-plane(Figure 16.49), then S is also the level surface of thefunction Taking the unit normal to to be
then gives
and
(11)6Rxy
ƒ §F ƒ
ƒ §F # p ƒ
dA = 6Rxy
2ƒx2
+ ƒy2
+ 1 dx dy,
ƒ §F # p ƒ = ƒ sƒxi + ƒy j - kd # k ƒ = ƒ -1 ƒ = 1
ƒ §F ƒ = ƒ ƒxi + ƒy j - k ƒ = 2ƒx2
+ ƒy2
+ 1
p = kRxyFsx, y, zd = ƒsx, yd - z .
Fsx, y, zd = 0Rxy
z = ƒsx, yd
d .
z
y
x 2
4x2 � 4y2 � z2 � 0
z � 0
x2 � y2 � 2xor
r � 2 cos �
16.5 Surface Area and Surface Integrals 1191
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1191
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSimilarly, the area of a smooth surface over a region inthe yz-plane is
(12)
and the area of a smooth over a region in the xz-planeis
(13)
Use Equations (11)–(13) to find the area of the surfaces in Exercises39–44.
39. The surface cut from the bottom of the paraboloid by the plane
40. The surface cut from the “nose” of the paraboloid by the yz-plane
41. The portion of the cone that lies over the regionbetween the circle and the ellipse in the xy-plane. (Hint: Use formulas from geometry to find thearea of the region.)
42. The triangle cut from the plane by the bound-ing planes of the first octant. Calculate the area three ways, oncewith each area formula
2x + 6y + 3z = 6
9x2+ 4y2
= 36x2+ y2
= 1z = 2x2
+ y2
x = 1 - y2- z2
z = 3z = x2
+ y2
A = 6Rxz
2ƒx2
+ ƒz2
+ 1 dx dz.
Rxzy = ƒsx, zd
A = 6Ryz
2ƒy2
+ ƒz2
+ 1 dy dz,
Ryzx = ƒsy, zd
43. The surface in the first octant cut from the cylinder by the planes and
44. The portion of the plane that lies above the region cutfrom the first quadrant of the xz-plane by the parabolax = 4 - z2
y + z = 4
y = 16>3x = 1y = s2>3dz3>2
1192 Chapter 16: Integration in Vector Fields
S
Surface z � f (x, y)
FIGURE 16.49 For a surfacethe surface area
formula in Equation (3) takes the form
A = 6Rxy
2ƒx2
+ ƒy2
+ 1 dx dy.
z = ƒsx, yd,
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1192
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi1192 Chapter 16: Integration in Vector Fields
Parametrized Surfaces
We have defined curves in the plane in three different ways:
Explicit form:
Implicit form:
Parametric vector form:
We have analogous definitions of surfaces in space:
Explicit form:
Implicit form:
There is also a parametric form that gives the position of a point on the surface as a vectorfunction of two variables. The present section extends the investigation of surface area andsurface integrals to surfaces described parametrically.
Parametrizations of Surfaces
Let(1)
be a continuous vector function that is defined on a region R in the uy-plane and one-to-one on the interior of R (Figure 16.50). We call the range of r the surface S defined ortraced by r. Equation (1) together with the domain R constitute a parametrization ofthe surface. The variables u and y are the parameters, and R is the parameter domain.
rsu, yd = ƒsu, ydi + gsu, ydj + hsu, ydk
Fsx, y, zd = 0.
z = ƒsx, yd
rstd = ƒstdi + gstdj, a … t … b.
Fsx, yd = 0
y = ƒsxd
16.6
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1192
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTo simplify our discussion, we take R to be a rectangle defined by inequalities of the formThe requirement that r be one-to-one on the interior of R ensures
that S does not cross itself. Notice that Equation (1) is the vector equivalent of threeparametric equations:
EXAMPLE 1 Parametrizing a Cone
Find a parametrization of the cone
Solution Here, cylindrical coordinates provide everything we need. A typical point
(x, y, z) on the cone (Figure 16.51) has and with and Taking and in Equation (1) gives theparametrization
EXAMPLE 2 Parametrizing a Sphere
Find a parametrization of the sphere
Solution Spherical coordinates provide what we need. A typical point (x, y, z) on thesphere (Figure 16.52) has and
Taking and in Equation (1) gives theparametrization
EXAMPLE 3 Parametrizing a Cylinder
Find a parametrization of the cylinder
Solution In cylindrical coordinates, a point (x, y, z) has andFor points on the cylinder (Figure 16.53), the equation is the
same as the polar equation for the cylinder’s base in the xy-plane:
or
A typical point on the cylinder therefore has
z = z.
y = r sin u = 6 sin2 u
x = r cos u = 6 sin u cos u = 3 sin 2u
r = 6 sin u, 0 … u … p.
r2- 6r sin u = 0
x2+ s y2
- 6y + 9d = 9
x2+ s y - 3d2
= 9z = z.x = r cos u, y = r sin u,
x2+ sy - 3d2
= 9, 0 … z … 5.
0 … u … 2p.0 … f … p,
rsf, ud = sa sin f cos udi + sa sin f sin udj + sa cos fdk,
y = uu = f0 … u … 2p.0 … f … p,z = a cos f,x = a sin f cos u, y = a sin f sin u,
x2+ y2
+ z2= a2.
rsr, ud = sr cos udi + sr sin udj + rk, 0 … r … 1, 0 … u … 2p.
y = uu = r0 … u … 2p .0 … r … 1z = 2x2
+ y2= r,x = r cos u, y = r sin u,
z = 2x2+ y2, 0 … z … 1.
x = ƒsu, yd, y = gsu, yd, z = hsu, yd.
a … u … b, c … y … d.
16.6 Parametrized Surfaces 1193
y
0u
R
z
x
y
Parametrization
S P
u � constant
y � constant(u, y)
Curve y � constant
Curve u � constant
r(u, y) � f (u, y)i � g(u, y)j � h(u, y)k,Position vector to surface point
FIGURE 16.50 A parametrized surface Sexpressed as a vector function of twovariables defined on a region R.
z
x yr
1
(x, y, z) �(r cos �, r sin �, r)
�
r(r, �) � (r cos �)i� (r sin �) j � rk
Cone:z � �x2 � y2
� r
FIGURE 16.51 The cone in Example 1can be parametrized using cylindricalcoordinates.
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1193
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTaking and in Equation (1) gives the parametrization
Surface Area
Our goal is to find a double integral for calculating the area of a curved surface S based onthe parametrization
We need S to be smooth for the construction we are about to carry out. The definition ofsmoothness involves the partial derivatives of r with respect to u and y:
ry =
0r0y
=
0ƒ0y
i +
0g0y
j +
0h0y
k.
ru =0r0u =
0ƒ0u i +
0g0u j +
0h0u k
rsu, yd = ƒsu, ydi + gsu, ydj + hsu, ydk, a … u … b, c … y … d.
rsu, zd = s3 sin 2udi + s6 sin2 udj + zk, 0 … u … p, 0 … z … 5.
y = zu = u
1194 Chapter 16: Integration in Vector Fields
z
xy
a
a
�(�, �)
�
�
(x, y, z) � (a sin � cos �, a sin � sin �, a cos �)
FIGURE 16.52 The sphere in Example 2can be parametrized using sphericalcoordinates.
z
x
y
z
r � 6 sin �
�(x, y, z)�(3 sin 2�, 6 sin2 �, z)
r(�, z)
Cylinder: x2 � ( y � 3)2 � 9orr � 6 sin �
FIGURE 16.53 The cylinder in Example3 can be parametrized using cylindricalcoordinates.
DEFINITION Smooth Parametrized SurfaceA parametrized surface is smooth if
and are continuous and is never zero on the parameter domain.ru * ryryru
rsu, yd = ƒsu, ydi + gsu, ydj + hsu, ydk
The condition that is never the zero vector in the definition of smoothnessmeans that the two vectors and are nonzero and never lie along the same line, so theyalways determine a plane tangent to the surface.
Now consider a small rectangle in R with sides on the lines and (Figure 16.54). Each side of maps to a curve on the sur-
face S, and together these four curves bound a “curved area element” In the notationof the figure, the side maps to curve the side maps to and theircommon vertex maps to P0.su0, y0d
C2,u = u0C1,y = y0
¢suy.¢Auyy = y0 + ¢yy = y0
u = u0, u = u0 + ¢u,¢Auy
ryru
ru * ry
0u
z
x
y
Parametrization
d
c
a b
R
S
u0 u0 � ∆u
∆Auy
y0 � ∆y
y0u � u0 � ∆u
y � y0 � ∆y∆�uy
P0C1: y � y0 C2: u � u0
y
FIGURE 16.54 A rectangular area element in the uy-plane maps onto a curvedarea element on S.¢suy
¢Auy
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1194
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiFigure 16.55 shows an enlarged view of The vector is tangent to atLikewise, is tangent to at The cross product is normal to the
surface at (Here is where we begin to use the assumption that S is smooth. We want tobe sure that )
We next approximate the surface element by the parallelogram on the tangentplane whose sides are determined by the vectors and (Figure 16.56). The areaof this parallelogram is
(2)
A partition of the region R in the uy-plane by rectangular regions generates a partitionof the surface S into surface area elements We approximate the area of each surfaceelement by the parallelogram area in Equation (2) and sum these areas together toobtain an approximation of the area of S:
(3)
As and approach zero independently, the continuity of and guarantees that thesum in Equation (3) approaches the double integral This doubleintegral defines the area of the surface S and agrees with previous definitions of area,though it is more general.
1dc 1b
a ƒ ru * ry ƒ du dy.ryru¢y¢u
auay
ƒ ru * ry ƒ ¢u ¢y.
¢suy
¢suy.¢Auy
ƒ ¢uru * ¢yry ƒ = ƒ ru * ry ƒ ¢u ¢y.
¢yry¢uru
¢suy
ru * ry Z 0.P0.
ru * ryP0.C2rysu0, y0dP0.C1rusu0, y0d¢suy.
16.6 Parametrized Surfaces 1195
yx
z
ru � ry
ru ry
P0
C1: y � y0
∆�uy
C2: u � u0
FIGURE 16.55 A magnified view of asurface area element ¢suy.
z
x y∆�uy
C2
C1∆yry
P0
∆uru
FIGURE 16.56 The parallelogramdetermined by the vectors and approximates the surface area element¢suy.
¢yry¢uru
DEFINITION Area of a Smooth SurfaceThe area of the smooth surface
is
(4)A = Ld
c L
b
a ƒ ru * ry ƒ du dy.
rsu, yd = ƒsu, ydi + gsu, ydj + hsu, ydk, a … u … b, c … y … d
As in Section 16.5, we can abbreviate the integral in Equation (4) by writing forƒ ru * ry ƒ du dy.
ds
Surface Area Differential and Differential Formula for Surface Area
(5)
Surface area Differential formuladifferential for surface area
ds = ƒ ru * ry ƒ du dy 6S
ds
EXAMPLE 4 Finding Surface Area (Cone)
Find the surface area of the cone in Example 1 (Figure 16.51).
Solution In Example 1, we found the parametrization
rsr, ud = sr cos udi + sr sin udj + rk, 0 … r … 1, 0 … u … 2p.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1195
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTo apply Equation (4), we first find
r
Thus, The area of the coneis
EXAMPLE 5 Finding Surface Area (Sphere)
Find the surface area of a sphere of radius a.
Solution We use the parametrization from Example 2:
For we get
Thus,
since for Therefore, the area of the sphere is
This agrees with the well-known formula for the surface area of a sphere.
Surface Integrals
Having found a formula for calculating the area of a parametrized surface, we can nowintegrate a function over the surface using the parametrized form.
= L2p
0 c-a2 cos f d
0
p
du = L2p
0 2a2 du = 4pa2 units squared.
A = L2p
0 Lp
0 a2 sin f df du
0 … f … p .sin f Ú 0
= a22sin2 f = a2 sin f,
= 2a4 sin4 f + a4 sin2 f cos2 f = 2a4 sin2 f ssin2 f + cos2 fd
ƒ rf * ru ƒ = 2a4 sin4 f cos2 u + a4 sin4 f sin2 u + a4 sin2 f cos2 f
= sa2 sin2 f cos udi + sa2 sin2 f sin udj + sa2 sin f cos fdk.
rf * ru = 3 i j k
a cos f cos u a cos f sin u - a sin f
-a sin f sin u a sin f cos u 0
3rf * ru,
0 … u … 2p.0 … f … p,
rsf, ud = sa sin f cos udi + sa sin f sin udj + sa cos fdk,
= L2p
0 L
1
0 22 r dr du = L
2p
0 222
du =
222
s2pd = p22 units squared.
A = L2p
0 L
1
0 ƒ rr * ru ƒ dr du
ƒ rr * ru ƒ = 2r2 cos2 u + r2 sin2 u + r2= 22r2
= 22r.
('''')''''*
= -sr cos udi - sr sin udj + sr cos2 u + r sin2 udk.
rr * ru = 3 i j k
cos u sin u 1
-r sin u r cos u 0
3rr * ru :
1196 Chapter 16: Integration in Vector Fields
Equation (4) with u = r, y = u
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1196
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
EXAMPLE 6 Integrating Over a Surface Defined Parametrically
Integrate over the cone
Solution Continuing the work in Examples 1 and 4, we have and
EXAMPLE 7 Finding Flux
Find the flux of outward through the parabolic cylinder (Figure 16.57).
Solution On the surface we have and so we automatically havethe parametrization The cross productof tangent vectors is
The unit normal pointing outward from the surface is
On the surface, so the vector field there is
Thus,
=
2x3z - x24x 2+ 1
.
F # n =124x2
+ 1 ssx2zds2xd + sxds -1d + s -z2ds0dd
F = yzi + xj - z2k = x2zi + xj - z2k.
y = x2 ,
n =
rx * rz
ƒ rx * rz ƒ
=
2x i - j24x2+ 1
.
rx * rz = 3 i j k
1 2x 0
0 0 1
3 = 2x i - j.
rsx, zd = x i + x2j + zk, 0 … x … 1, 0 … z … 4.z = z,x = x, y = x2,
0 … x … 1, 0 … z … 4y = x2,F = yzi + xj - z2k
=
224
L2p
0 cos2 u du =
224
cu2
+14
sin 2u d0
2p
=
p224
.
= 22L2p
0 L
1
0 r3 cos2 u dr du
6S
x2 ds = L2p
0 L
1
0 Ar2 cos2 u B A22r B dr du
ƒ rr * ru ƒ = 22r
z = 2x2+ y2, 0 … z … 1.Gsx, y, zd = x2
16.6 Parametrized Surfaces 1197
DEFINITION Parametric Surface IntegralIf S is a smooth surface defined parametrically as
and G(x, y, z) is a continuous function definedon S, then the integral of G over S is
6S
Gsx, y, zd ds = Ld
c L
b
a Gsƒsu, yd, gsu, yd, hsu, ydd ƒ ru * ry ƒ du dy.
hsu, ydk, a … u … b, c … y … d,rsu, yd = ƒsu, ydi + gsu, ydj +
x = r cos u
z
x
y
n
1
1
4
(1, 0, 4) y � x2
FIGURE 16.57 Finding the flux throughthe surface of a parabolic cylinder(Example 7).
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1197
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe flux of F outward through the surface is
EXAMPLE 8 Finding a Center of Mass
Find the center of mass of a thin shell of constant density cut from the coneby the planes and (Figure 16.58).
Solution The symmetry of the surface about the z-axis tells us that Wefind Working as in Examples 1 and 4, we have
and
Therefore,
The shell’s center of mass is the point (0, 0, 14 9).> z =
Mxy
M=
14pd22
3 A3pd22 B =149
.
= d22L2p
0 73
du =143
pd22
= d22L2p
0 L
2
1 r 2 dr du = d22L
2p
0 cr 3
3d
1
2
du
Mxy = 6S
dz ds = L2p
0 L
2
1 dr22r dr du
= d22 c3u2d
0
2p
= 3pd22
= d22L2p
0 cr 2
2d
1
2
du = d22L2p
0 a2 -
12b du
M = 6S
d ds = L2p
0 L
2
1 d22r dr du
ƒ rr * ru ƒ = 22r.
rsr, ud = r cos ui + r sin uj + rk, 1 … r … 2, 0 … u … 2p,
z = Mxy >M .x = y = 0 .
z = 2z = 1z = 2x2+ y2
d
=14
s9d -14
s1d = 2.
= L4
0 12
sz - 1d dz =14
sz - 1d2 d0
4
= L4
0 L
1
0 s2x3z - xd dx dz = L
4
0 c1
2 x4z -
12
x2 dx = 0
x = 1
dz
= L4
0 L
1
0
2x3z - x24x2+ 124x2
+ 1 dx dz
6S
F # n ds = L4
0 L
1
0
2x3z - x24x2+ 1
ƒ rx * rz ƒ dx dz
1198 Chapter 16: Integration in Vector Fields
y
z
x
1
2z � �x2 � y2
FIGURE 16.58 The cone frustum formedwhen the cone is cut bythe planes and (Example 8).z = 2z = 1
z = 2x2+ y2
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1198
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16.6 Parametrized Surfaces 1199
EXERCISES 16.6
Finding Parametrizations for SurfacesIn Exercises 1–16, find a parametrization of the surface. (There aremany correct ways to do these, so your answers may not be the sameas those in the back of the book.)
1. The paraboloid
2. The paraboloid
3. Cone frustum The first-octant portion of the cone between the planes and
4. Cone frustum The portion of the cone between the planes and
5. Spherical cap The cap cut from the sphere by the cone
6. Spherical cap The portion of the sphere inthe first octant between the xy-plane and the cone
7. Spherical band The portion of the sphere
between the planes and
8. Spherical cap The upper portion cut from the sphereby the plane
9. Parabolic cylinder between planes The surface cut from theparabolic cylinder by the planes and
10. Parabolic cylinder between planes The surface cut from theparabolic cylinder by the planes and
11. Circular cylinder band The portion of the cylinder between the planes and
12. Circular cylinder band The portion of the cylinder above the xy-plane between the planes and
13. Tilted plane inside cylinder The portion of the plane
a. Inside the cylinder
b. Inside the cylinder
14. Tilted plane inside cylinder The portion of the plane
a. Inside the cylinder
b. Inside the cylinder
15. Circular cylinder band The portion of the cylinder between the planes and
16. Circular cylinder band The portion of the cylinder between the planes and
Areas of Parametrized SurfacesIn Exercises 17–26, use a parametrization to express the area of thesurface as a double integral. Then evaluate the integral. (There are
x = 10x = 0sz - 5d2= 25
y2+
y = 3y = 0z2= 4
sx - 2d2+
y2+ z2
= 2
x2+ z2
= 3
x - y + 2z = 2
y2+ z2
= 9
x2+ y2
= 9
z = 1x + y +
y = 2y = -2x2
+ z2= 4
x = 3x = 0y2
+ z2= 9
y = 2z = 0, z = 3y = x2
z = 0x = 0, x = 2 ,z = 4 - y2
z = -2x2+ y2
+ z2= 8
z = -23>2z = 23>2x2
+ y2+ z2
= 3
z = 2x2+ y2
x2+ y2
+ z2= 4
z = 2x2+ y2
x2+ y2
+ z2= 9
z = 4z = 2z = 22x2
+ y2
z = 3z = 02x2+ y2>2
z =
z = 9 - x2- y2, z Ú 0
z = x2+ y2, z … 4
many correct ways to set up the integrals, so your integrals may not bethe same as those in the back of the book. They should have the samevalues, however.)
17. Titled plane inside cylinder The portion of the planeinside the cylinder
18. Plane inside cylinder The portion of the plane insidethe cylinder
19. Cone frustum The portion of the cone between the planes and
20. Cone frustum The portion of the cone between the planes and
21. Circular cylinder band The portion of the cylinder between the planes and
22. Circular cylinder band The portion of the cylinder between the planes and
23. Parabolic cap The cap cut from the paraboloid
by the cone
24. Parabolic band The portion of the paraboloid between the planes and
25. Sawed-off sphere The lower portion cut from the sphereby the cone
26. Spherical band The portion of the sphere
between the planes and
Integrals Over Parametrized SurfacesIn Exercises 27–34, integrate the given function over the given sur-face.
27. Parabolic cylinder over the parabolic cylinder
28. Circular cylinder over the cylindrical surface
29. Sphere over the unit sphere
30. Hemisphere over the hemisphere
31. Portion of plane over the portion of the planethat lies above the square
in the xy-plane
32. Cone over the cone
33. Parabolic dome over the parabolicdome
34. Spherical cap over the part of the spherethat lies above the cone z = 2x2
+ y2x2+ y2
+ z2= 4
Hsx, y, zd = yz,
z = 1 - x2- y2, z Ú 0Hsx, y, zd = x225 - 4z,
0 … z … 1z = 2x2
+ y2,Fsx, y, zd = z - x,
0 … y … 1,0 … x … 1, x + y + z = 4
Fsx, y, zd = z,
z2= a2, z Ú 0
x2+ y2
+Gsx, y, zd = z2,
x2+ y2
+ z2= 1Gsx, y, zd = x2,
y2+ z2
= 4, z Ú 0, 1 … x … 4Gsx, y, zd = z,
y = x2, 0 … x … 2, 0 … z … 3Gsx, y, zd = x,
z = 23z = -1
x2+ y2
+ z2= 4
z = 2x2+ y2x2
+ y2+ z2
= 2
z = 4z = 1z = x2
+ y2
z = 2x2+ y2
z = 2 - x2- y2
y = 1y = -110x2
+ z2=
z = 4z = 1x2
+ y2= 1
z = 4>3z = 1z = 2x2
+ y2>3z = 6z = 2
z = 22x2+ y2
x2+ y2
= 4z = -x
x2+ y2
= 1y + 2z = 2
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:26 AM Page 1199
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiFlux Across Parametrized SurfacesIn Exercises 35–44, use a parametrization to find the flux across the surface in the given direction.
35. Parabolic cylinder outward (normal awayfrom the x-axis) through the surface cut from the parabolic cylinder
by the planes and
36. Parabolic cylinder outward (normal awayfrom the yz-plane) through the surface cut from the paraboliccylinder by the planes and
37. Sphere across the portion of the sphere in the first octant in the direction away from the origin
38. Sphere across the sphere in the direction away from the origin
39. Plane upward across the portion ofthe plane that lies above the square
in the xy-plane
40. Cylinder outward through the portion of thecylinder cut by the planes and
41. Cone outward (normal away from the z-axis)through the cone
42. Cone outward (normal away from the z-axis) through the cone
43. Cone frustum outward (normal away
from the z-axis) through the portion of the cone between the planes and
44. Paraboloid outward (normal way fromthe z-axis) through the surface cut from the bottom of the parabo-loid by the plane
Moments and Masses45. Find the centroid of the portion of the sphere
that lies in the first octant.
46. Find the center of mass and the moment of inertia and radius ofgyration about the z-axis of a thin shell of constant density cutfrom the cone by the planes and
47. Find the moment of inertia about the z-axis of a thin sphericalshell of constant density
48. Find the moment of inertia about the z-axis of a thin conical shellof constant density
Planes Tangent to Parametrized SurfacesThe tangent plane at a point on aparametrized surface is theplane through normal to the vector thecross product of the tangent vectors and InExercises 49–52, find an equation for the plane tangent to the surfaceat Then find a Cartesian equation for the surface and sketch thesurface and tangent plane together.
P0.
rysu0, y0d at P0.rusu0, y0drusu0, y0d * rysu0, y0d,P0
rsu, yd = ƒsu, ydi + gsu, ydj + hsu, ydkP0sƒsu0, y0d, gsu0, y0d, hsu0, y0dd
d.z = 2x2+ y2, 0 … z … 1,
d.x2+ y2
+ z2= a2
z = 2.z = 1x2+ y2
- z2= 0
d
x2+ y2
+ z2= a2
z = 1z = x2+ y2
F = 4xi + 4yj + 2k
z = 2z = 1z = 2x2
+ y2
F = -xi - yj + z2k
z = 22x2+ y2, 0 … z … 2
F = y2i + xzj - k
z = 2x2+ y2, 0 … z … 1
F = xyi - zk
z = az = 0x2+ y2
= 1F = xi + yj + zk
0 … x … a, 0 … y … a ,x + y + z = 2a
F = 2xyi + 2yzj + 2xzk
x2+ y2
+ z2= a2F = xi + yj + zk
z2= a2
x2+ y2
+F = zk
z = 2z = 0y = x2, -1 … x … 1 ,
F = x2j - xzk
z = 0x = 0, x = 1 ,z = 4 - y2
F = z2i + xj - 3zk
4S F # n ds
49. Cone The cone at the point corresponding to
50. Hemisphere The hemisphere surface at
the point corresponding to
51. Circular cylinder The circular cylinder at the point
corresponding to (See Example 3.)
52. Parabolic cylinder The parabolic cylinder surface at the point
corresponding to
Further Examples of Parametrizations53. a. A torus of revolution (doughnut) is obtained by rotating a circle
C in the xz-plane about the z-axis in space. (See the accompa-nying figure.) If C has radius and center (R, 0, 0), showthat a parametrization of the torus is
where and are the angles in thefigure.
b. Show that the surface area of the torus is
x
z
0
C
ur
R
z
uy
x
y
r(u, y)
A = 4p2Rr.
0 … y … 2p0 … u … 2p
+ ssR + r cos udsin ydj + sr sin udk,
rsu, yd = ssR + r cos udcos ydi
r 7 0
sx, yd = s1, 2dP0s1, 2, -1dxi + yj - x2k, - q 6 x 6 q , - q 6 y 6 q ,
rsx, yd =
su, zd = sp>3, 0dP0 A323>2, 9>2, 0 Bs6 sin2 udj + zk, 0 … u … p,
rsu, zd = s3 sin 2udi +
sp>6, p>4dsf, ud =P0 A22, 22, 223 B+ s4 sin f sin udj + s4 cos fdk, 0 … f … p>2, 0 … u … 2p,
rsf, ud = s4 sin f cos udisr, ud = s2, p>4d
P0 A22, 22, 2 B0 … u … 2prsr, ud = sr cos udi + sr sin udj + rk, r Ú 0,
1200 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1200
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi54. Parametrization of a surface of revolution Suppose that theparametrized curve C: (ƒ(u), g(u)) is revolved about the x-axis,where for
a. Show that
is a parametrization of the resulting surface of revolution,where is the angle from the xy-plane to the pointr(u, y) on the surface. (See the accompanying figure.) Noticethat ƒ(u) measures distance along the axis of revolution andg(u) measures distance from the axis of revolution.
y
x
z
C
( f (u), g(u), 0)
g(u)
r(u, y)
f (u)
y
0 … y … 2p
rsu, yd = ƒsudi + sgsudcos ydj + sgsudsin ydk
a … u … b .gsud 7 0
b. Find a parametrization for the surface obtained by revolvingthe curve about the x-axis.
55. a. Parametrization of an ellipsoid Recall the parametrizationfor the ellipse
(Section 3.5, Example 13). Using theangles and in spherical coordinates, show that
is a parametrization of the ellipsoid
b. Write an integral for the surface area of the ellipsoid, but donot evaluate the integral.
56. Hyperboloid of one sheet
a. Find a parametrization for the hyperboloid of one sheetin terms of the angle associated with
the circle and the hyperbolic parameter uassociated with the hyperbolic function (SeeSection 7.8, Exercise 84.)
b. Generalize the result in part (a) to the hyperboloid
57. (Continuation of Exercise 56.) Find a Cartesian equation for theplane tangent to the hyperboloid at the point
where
58. Hyperboloid of two sheets Find a parametrization of thehyperboloid of two sheets sz2>c2d - sx2>a2d - sy2>b2d = 1.
x02
+ y02
= 25.sx0, y0, 0d,x2
+ y2- z2
= 25
sx2>a2d + sy2>b2d - sz2>c2d = 1.
r2- z2
= 1.x2
+ y2= r2
ux2+ y2
- z2= 1
sz2>c2d = 1.sx2>a2d + s y2>b2d +
rsu, fd = sa cos u cos fdi + sb sin u cos fdj + sc sin fdk
fu
sx2>a2d + sy2>b2d = 1x = a cos u, y = b sin u, 0 … u … 2p
x = y2, y Ú 0 ,
1201
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1201
16.6 Parametrized Surfaces
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi16.7 Stokes’ Theorem 1201
Stokes’ Theorem
As we saw in Section 16.4, the circulation density or curl component of a two-dimensionalfield at a point (x, y) is described by the scalar quantity In three dimensions, the circulation around a point P in a plane is described with a vector.This vector is normal to the plane of the circulation (Figure 16.59) and points in thedirection that gives it a right-hand relation to the circulation line. The length of the vectorgives the rate of the fluid’s rotation, which usually varies as the circulation plane is tiltedabout P. It turns out that the vector of greatest circulation in a flow with velocity field
is the curl vector
(1)
We get this information from Stokes’ Theorem, the generalization of the circulation-curlform of Green’s Theorem to space.
Notice that is consistent with our definition inSection 16.4 when The formula for curl F in Equation (1) isoften written using the symbolic operator
(2)§ = i 0
0x + j 0
0y + k 0
0z .
F = Msx, ydi + Nsx, ydj.scurl Fd # k = s0N>0x - 0M>0yd
curl F = a0P0y -
0N0z b i + a0M
0z -
0P0x b j + a0N
0x -
0M0y bk.
F = Mi + Nj + Pk
s0N>0x - 0M>0yd.F = Mi + Nj
16.7
P
Curl F
FIGURE 16.59 The circulation vector ata point P in a plane in a three-dimensionalfluid flow. Notice its right-hand relation tothe circulation line.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1201
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi(The symbol is pronounced “del.”) The curl of F is
= curl F.
= a0P0y -
0N0z b i + a0M
0z -0P0x bj + a0N
0x -0M0y bk
§ * F = 4 i j k
0
0x0
0y0
0z
M N P
4§ * F :§
1202 Chapter 16: Integration in Vector Fields
(3)curl F = § * F
EXAMPLE 1 Finding Curl F
Find the curl of
Solution
As we will see, the operator has a number of other applications. For instance, whenapplied to a scalar function ƒ(x, y, z), it gives the gradient of ƒ:
This may now be read as “del ƒ” as well as “grad ƒ.”
Stokes’ Theorem
Stokes’ Theorem says that, under conditions normally met in practice, the circulation of avector field around the boundary of an oriented surface in space in the direction counter-clockwise with respect to the surface’s unit normal vector field n (Figure 16.60) equals theintegral of the normal component of the curl of the field over the surface.
§ƒ =
0ƒ0x i +
0ƒ0y j +
0ƒ0z k.
§
= -4i - 2xj + k
= s0 - 4di - s2x - 0dj + s0 + 1dk
+ a 0
0x s4zd -
0
0y sx2- ydbk
= a 0
0y sx2d -
0
0z s4zdb i - a 0
0x sx2d -
0
0z sx2- ydb j
= 4 i j k
0
0x0
0y0
0z
x2- y 4z x2
4 curl F = § * F
F = sx2- ydi + 4zj + x2k.
Equation (3)
nS
C
FIGURE 16.60 The orientation of thebounding curve C gives it a right-handedrelation to the normal field n.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1202
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
Notice from Equation (4) that if two different oriented surfaces and have thesame boundary C, their curl integrals are equal:
Both curl integrals equal the counterclockwise circulation integral on the left side ofEquation (4) as long as the unit normal vectors and correctly orient the surfaces.
Naturally, we need some mathematical restrictions on F, C, and S to ensure the existenceof the integrals in Stokes’ equation. The usual restrictions are that all functions, vector fields,and their derivatives be continuous.
If C is a curve in the xy-plane, oriented counterclockwise, and R is the region in thexy-plane bounded by C, then and
Under these conditions, Stokes’ equation becomes
which is the circulation-curl form of the equation in Green’s Theorem. Conversely, byreversing these steps we can rewrite the circulation-curl form of Green’s Theorem fortwo-dimensional fields in del notation as
(5)
See Figure 16.61.
EXAMPLE 2 Verifying Stokes’ Equation for a Hemisphere
Evaluate Equation (4) for the hemisphere its bounding circleand the field F = yi - xj.C: x2
+ y2= 9, z = 0,
S: x2+ y2
+ z2= 9, z Ú 0,
FC
F # dr = 6R
§ * F # k dA.
FC
F # dr = 6R
a0N0x -
0M0y b dx dy,
s§ * Fd # n = s§ * Fd # k = a0N0x -
0M0y b .
ds = dx dy
n2n1
6S1
§ * F # n1 ds = 6S2
§ * F # n2 ds.
S2S1
16.7 Stokes’ Theorem 1203
THEOREM 5 Stokes’ TheoremThe circulation of a vector field around the boundary C ofan oriented surface S in the direction counterclockwise with respect to the sur-face’s unit normal vector n equals the integral of over S.
(4)
Counterclockwise Curl integralcirculation
FC
F # dr = 6S
§ * F # n ds
§ * F # n
F = Mi + Nj + Pk
Circulation
Curl
Curl
k
n
S
R
Circulation
Green:
Stokes:
FIGURE 16.61 Comparison of Green’sTheorem and Stokes’ Theorem.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1203
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSolution We calculate the counterclockwise circulation around C (as viewed fromabove) using the parametrization
For the curl integral of F, we have
and
The circulation around the circle equals the integral of the curl over the hemisphere, as itshould.
EXAMPLE 3 Finding Circulation
Find the circulation of the field around the curve C in which
the plane meets the cone counterclockwise as viewed from above(Figure 16.62).
Solution Stokes’Theorem enables us to find the circulation by integrating over the surfaceof the cone. Traversing C in the counterclockwise direction viewed from above correspondsto taking the inner normal n to the cone, the normal with a positive z-component.
We parametrize the cone as
We then have
=122
Q-scos udi - ssin udj + kR
n =
rr * ruƒ rr * ru ƒ
=
-sr cos udi - sr sin udj + rk
r22
rsr, ud = sr cos udi + sr sin udj + rk, 0 … r … 2, 0 … u … 2p.
z = 2x2+ y2 ,z = 2
F = sx2- ydi + 4zj + x2k
6S
§ * F # n ds = 6x2
+y2…9
-2 dA = -18p.
§ * F # n ds = -2z3
3z dA = -2 dA
ds =
3z dA
n =
xi + yj + zk2x2+ y2
+ z2=
xi + yj + zk3
= s0 - 0di + s0 - 0dj + s -1 - 1dk = -2k
§ * F = a0P0y -
0N0z b i + a0M
0z -0P0x bj + a0N
0x -0M0y bk
FC
F # dr = L2p
0-9 du = -18p.
F # dr = -9 sin2 u du - 9 cos2 u du = -9 du
F = yi - xj = s3 sin udi - s3 cos udj
dr = s -3 sin u dudi + s3 cos u dudj
rsud = s3 cos udi + s3 sin udj, 0 … u … 2p:
1204 Chapter 16: Integration in Vector Fields
Outer unit normal
Section 16.5, Example 5,with a = 3
y
z
x
n
S: r(t) � (r cos �)i � (r sin �) j � rk
C: x2 � y2 � 4, z � 2
FIGURE 16.62 The curve C and cone Sin Example 3.
Section 16.6,Example 4
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1204
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
Accordingly,
and the circulation is
Paddle Wheel Interpretation of
Suppose that v(x, y, z) is the velocity of a moving fluid whose density at (x, y, z) isand let Then
is the circulation of the fluid around the closed curve C. By Stokes’Theorem, the circulationis equal to the flux of through a surface S spanning C:
Suppose we fix a point Q in the domain of F and a direction u at Q. Let C be a circle ofradius with center at Q, whose plane is normal to u. If is continuous at Q, theaverage value of the u-component of over the circular disk S bounded by Capproaches the u-component of at Q as
If we replace the surface integral in this last equation by the circulation, we get
(6)
The left-hand side of Equation (6) has its maximum value when u is the direction ofWhen is small, the limit on the right-hand side of Equation (6) is approximately
1pr2F
C
F # dr,
r§ * F.
s§ * F # udQ = limp:0
1pr2F
C
F # dr.
s§ * F # udQ = limp:0
1pr26
S
§ * F # u ds.
r: 0:§ * F§ * F
§ * Fr ,
FC
F # dr = 6S
§ * F # n ds.
§ * F
FC
F # dr
F = dv .dsx, y, zd
§ * F
= L2p
0 L
2
0
122 a4 cos u + r sin 2u + 1b Ar22 dr du B = 4p.
FC
F # dr = 6S
§ * F # n ds
=122
a4 cos u + r sin 2u + 1b § * F # n =
122 a4 cos u + 2r cos u sin u + 1b
= -4i - 2r cos uj + k.
§ * F = -4i - 2xj + k
ds = r22 dr du
16.7 Stokes’ Theorem 1205
Section 16.6, Example 4
Example 1
x = r cos u
Stokes’ Theorem, Equation (4)
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1205
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwhich is the circulation around C divided by the area of the disk (circulation density).Suppose that a small paddle wheel of radius is introduced into the fluid at Q, with its axledirected along u. The circulation of the fluid around C will affect the rate of spin of the paddlewheel. The wheel will spin fastest when the circulation integral is maximized; therefore it willspin fastest when the axle of the paddle wheel points in the direction of (Figure 16.63).
EXAMPLE 4 Relating to Circulation Density
A fluid of constant density rotates around the z-axis with velocity where is a positive constant called the angular velocity of the rotation (Figure 16.64). If
find and relate it to the circulation density.
Solution With
By Stokes’Theorem, the circulation of F around a circle C of radius bounding a disk S ina plane normal to say the xy-plane, is
Thus,
consistent with Equation (6) when
EXAMPLE 5 Applying Stokes’ Theorem
Use Stokes’ Theorem to evaluate if and C is the bound-ary of the portion of the plane in the first octant, traversed counterclock-wise as viewed from above (Figure 16.65).
Solution The plane is the level surface of the function The unit normal vector
is consistent with the counterclockwise motion around C. To apply Stokes’Theorem, we find
On the plane, z equals so
§ * F = sx - 3s2 - 2x - yddj + yk = s7x + 3y - 6dj + yk
2 - 2x - y,
curl F = § * F = 4 i j k
0
0x0
0y0
0z
xz xy 3xz
4 = sx - 3zdj + yk.
n =
§ƒ
ƒ §ƒ ƒ
=
s2i + j + kdƒ 2i + j + k ƒ
=126
a2i + j + kby + z.
ƒsx, y, zd = 2x +ƒsx, y, zd = 2
2x + y + z = 2F = xzi + xyj + 3xzk1C F # dr,
u = k.
s§ * Fd # k = 2v =1pr2F
C
F # dr,
FC
F # dr = 6S
§ * F # n ds = 6S
2vk # k dx dy = s2vdspr2d.
§ * F ,r
= s0 - 0di + s0 - 0dj + sv - s -vddk = 2vk.
§ * F = a0P0y -
0N0z b i + a0M
0z -0P0x bj + a0N
0x -0M0y bk
F = v = -vyi + vxj,
§ * FF = v,v
v = vs -yi + xjd,
§ * F
§ * F
r
1206 Chapter 16: Integration in Vector Fields
Q
Curl F
FIGURE 16.63 The paddle wheelinterpretation of curl F.
x
y
r
O
z
P(x, y, z)
�
P(x, y, 0)
v � �(–yi � xj)
FIGURE 16.64 A steady rotational flowparallel to the xy-plane, with constantangular velocity in the positive(counterclockwise) direction (Example 4).
v
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1206
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiand
The surface area element is
The circulation is
Proof of Stokes’ Theorem for Polyhedral Surfaces
Let S be a polyhedral surface consisting of a finite number of plane regions. (See Figure 16.66for an example.) We apply Green’s Theorem to each separate panel of S. There are two typesof panels:
1. Those that are surrounded on all sides by other panels
2. Those that have one or more edges that are not adjacent to other panels.
The boundary of S consists of those edges of the type 2 panels that are not adjacent toother panels. In Figure 16.66, the triangles EAB, BCE, and CDE represent a part of S, withABCD part of the boundary Applying Green’s Theorem to the three triangles in turnand adding the results, we get
(7)
The three line integrals on the left-hand side of Equation (7) combine into a single lineintegral taken around the periphery ABCDE because the integrals along interior segmentscancel in pairs. For example, the integral along segment BE in triangle ABE is opposite insign to the integral along the same segment in triangle EBC. The same holds for segmentCE. Hence, Equation (7) reduces to
When we apply Green’s Theorem to all the panels and add the results, we get
F¢
F # dr = 6S
§ * F # n ds.
FABCDE
F # dr = 6ABCDE
§ * F # n ds.
£ FEAB
+ FBCE
+ FCDE
≥F # dr = £6EAB
+ 6BCE
+ 6CDE
≥§ * F # n ds.
¢.
¢
= L1
0 L
2 - 2x
0 s7x + 4y - 6d dy dx = -1.
= L1
0 L
2 - 2x
0
126 a7x + 4y - 6b26 dy dx
FC
F # dr = 6S
§ * F # n ds
ds =
ƒ §ƒ ƒ
ƒ §ƒ # k ƒ
dA =
261
dx dy.
§ * F # n =126
a7x + 3y - 6 + yb =126
a7x + 4y - 6b .
16.7 Stokes’ Theorem 1207
y
z
x
R(1, 0, 0)
(0, 2, 0)
(0, 0, 2)
C
n
2x � y � z � 2
y � 2 � 2x
FIGURE 16.65 The planar surface inExample 5.
Stokes’ Theorem, Equation (4)
A
B C
D
E
FIGURE 16.66 Part of a polyhedralsurface.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1207
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThis is Stokes’ Theorem for a polyhedral surface S. You can find proofs for more generalsurfaces in advanced calculus texts.
Stokes’ Theorem for Surfaces with Holes
Stokes’ Theorem can be extended to an oriented surface S that has one or more holes(Figure 16.67), in a way analogous to the extension of Green’s Theorem: The surfaceintegral over S of the normal component of equals the sum of the line integralsaround all the boundary curves of the tangential component of F, where the curves are tobe traced in the direction induced by the orientation of S.
An Important Identity
The following identity arises frequently in mathematics and the physical sciences.
§ * F
1208 Chapter 16: Integration in Vector Fields
S
n
FIGURE 16.67 Stokes’ Theorem alsoholds for oriented surfaces with holes.
(8)curl grad ƒ = 0 or § * §f = 0
This identity holds for any function ƒ(x, y, z) whose second partial derivatives arecontinuous. The proof goes like this:
If the second partial derivatives are continuous, the mixed second derivatives in parenthe-ses are equal (Theorem 2, Section 14.3) and the vector is zero.
Conservative Fields and Stokes’ Theorem
In Section 16.3, we found that a field F is conservative in an open region D in space isequivalent to the integral of F around every closed loop in D being zero. This, in turn, isequivalent in simply connected open regions to saying that § * F = 0.
§ * §ƒ = 5 i j k
0
0x0
0y0
0z
0ƒ0x
0ƒ0y
0ƒ0z
5 = sƒzy - ƒyzdi - sƒzx - ƒxzdj + sƒyx - ƒxydk.
THEOREM 6 Curl Related to the Closed-Loop PropertyIf at every point of a simply connected open region D in space, thenon any piecewise-smooth closed path C in D,
FC
F # dr = 0.
§ * F = 0
F = 0
Sketch of a Proof Theorem 6 is usually proved in two steps. The first step is for simpleclosed curves. A theorem from topology, a branch of advanced mathematics, states that
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1208
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufievery differentiable simple closed curve C in a simply connected open region D is theboundary of a smooth two-sided surface S that also lies in D. Hence, by Stokes’ Theorem,
The second step is for curves that cross themselves, like the one in Figure 16.68. Theidea is to break these into simple loops spanned by orientable surfaces, apply Stokes’Theorem one loop at a time, and add the results.
The following diagram summarizes the results for conservative fields defined onconnected, simply connected open regions.
FC
F # dr = 6S
§ * F # n ds = 0.
16.7 Stokes’ Theorem 1209
FIGURE 16.68 In a simply connectedopen region in space, differentiable curvesthat cross themselves can be divided intoloops to which Stokes’ Theorem applies.
Theorem 1,Section 16.3
Theorem 6Domain's simpleconnectivity andStokes' theorem
over any closedpath in D
F � �f on DF conservativeon D
� � F � 0 throughout DEC F • dr � 0
Vector identity (Eq. 8)(continuous secondpartial derivatives)
Theorem 2,Section 13.3
�
�
�
�
���
4100 AWL/Thomas_ch16p1143-1228 9/17/04 1:50 PM Page 1209
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi16.7 Stokes’ Theorem 1209
EXERCISES 16.7
Using Stokes’ Theorem to Calculate CirculationIn Exercises 1–6, use the surface integral in Stokes’ Theorem tocalculate the circulation of the field F around the curve C in theindicated direction.
1.
C: The ellipse in the xy-plane, counterclockwisewhen viewed from above
2.
C: The circle in the xy-plane, counterclockwisewhen viewed from above
3.
C: The boundary of the triangle cut from the plane by the first octant, counterclockwise when viewed from above
4.
C: The boundary of the triangle cut from the planeby the first octant, counterclockwise when
viewed from above
5.
C: The square bounded by the lines and in thexy-plane, counterclockwise when viewed from above
y = ;1x = ;1
F = s y2+ z2di + sx2
+ y2dj + sx2+ y2dk
x + y + z = 1
F = sy2+ z2di + sx2
+ z2dj + sx2+ y2dk
z = 1x + y +
F = yi + xzj + x2k
x2+ y2
= 9
F = 2yi + 3xj - z2k
4x2+ y2
= 4
F = x2i + 2xj + z2k
6.
C: The intersection of the cylinder and thehemisphere , counterclockwisewhen viewed from above.
Flux of the Curl7. Let n be the outer unit normal of the elliptical shell
and let
Find the value of
(Hint: One parametrization of the ellipse at the base of the shell is)
8. Let n be the outer unit normal (normal away from the origin) ofthe parabolic shell
S: 4x2+ y + z2
= 4, y Ú 0,
x = 3 cos t, y = 2 sin t, 0 … t … 2p.
6S
§ * F # n ds.
F = yi + x2j + sx2+ y4d3>2 sin e2xyz k.
S: 4x2+ 9y2
+ 36z2= 36, z Ú 0,
x2+ y2
+ z2= 16, z Ú 0
x2+ y2
= 4
F = x2y3i + j + zk
4100 AWL/Thomas_ch16p1143-1228 9/17/04 1:50 PM Page 1209
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiand let
Find the value of
9. Let S be the cylinder together with itstop, Let Use Stokes’Theorem to find the flux of outward through S.
10. Evaluate
where S is the hemisphere
11. Flux of curl F Show that
has the same value for all oriented surfaces S that span C and thatinduce the same positive direction on C.
12. Let F be a differentiable vector field defined on a region containinga smooth closed oriented surface S and its interior. Let n be the unitnormal vector field on S. Suppose that S is the union of twosurfaces and joined along a smooth simple closed curve C.Can anything be said about
Give reasons for your answer.
Stokes’ Theorem for Parametrized SurfacesIn Exercises 13–18, use the surface integral in Stokes’ Theorem tocalculate the flux of the curl of the field F across the surface S in thedirection of the outward unit normal n.
13.
14.
15.
16.
0 … r … 5, 0 … u … 2pS: rsr, ud = sr cos udi + sr sin udj + s5 - rdk, F = sx - ydi + s y - zdj + sz - xdk0 … r … 1, 0 … u … 2pS: rsr, ud = sr cos udi + sr sin udj + rk, F = x2yi + 2y3zj + 3zk
0 … r … 3, 0 … u … 2pS: rsr, ud = sr cos udi + sr sin udj + s9 - r2dk, F = sy - zdi + sz - xdj + sx + zdk0 … r … 2, 0 … u … 2pS: rsr, ud = sr cos udi + sr sin udj + s4 - r2dk, F = 2zi + 3xj + 5yk
6S
§ * F # n ds?
S2S1
6S
§ * F # n ds
x2+ y2
+ z2= 1, z Ú 0.
6S
§ * s yid # n ds,
§ * FF = -yi + xj + x2k.x2
+ y2… a2, z = h.
x2+ y2
= a2, 0 … z … h,
6S
§ * F # n ds.
F = a-z +
12 + x
b i + stan-1 ydj + ax +
14 + z
bk.
17.
18.
Theory and Examples19. Zero circulation Use the identity (Equation (8) in
the text) and Stokes’ Theorem to show that the circulations of thefollowing fields around the boundary of any smooth orientablesurface in space are zero.
a.
b.
c.
d.
20. Zero circulation Let Showthat the clockwise circulation of the field around thecircle in the xy-plane is zero
a. by taking andintegrating over the circle.
b. by applying Stokes’ Theorem.
21. Let C be a simple closed smooth curve in the planeoriented as shown here. Show that
depends only on the area of the region enclosed by C and not onthe position or shape of C.
22. Show that if then
23. Find a vector field with twice-differentiable components whosecurl is or prove that no such field exists.
24. Does Stokes’ Theorem say anything special about circulation in afield whose curl is zero? Give reasons for your answer.
25. Let R be a region in the xy-plane that is bounded by a piecewise-smooth simple closed curve C and suppose that the moments of
xi + yj + zk
§ * F = 0.F = xi + yj + zk,
y
z
O a
x
C
11
22x � 2y � z � 2
FC
2y dx + 3z dy - x dz
2x + 2y + z = 2 ,
F # drr = sa cos tdi + sa sin tdj, 0 … t … 2p,
x2+ y2
= a2F = §ƒ
ƒsx, y, zd = sx2+ y2
+ z2d-1>2.F = §ƒ
F = § * sxi + yj + zkdF = §sxy2z3dF = 2xi + 2yj + 2zk
§ * §ƒ = 0
0 … f … p>2, 0 … u … 2pS: rsf, ud = s2 sin f cos udi + s2 sin f sin udj + s2 cos fdk,
F = y2i + z2j + xk
0 … f … p>2, 0 … u … 2pA23 cos f Bk, S: rsf, ud = A23 sin f cos u B i + A23 sin f sin u B j +
F = 3yi + s5 - 2xdj + sz2- 2dk
1210 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1210
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiinertia of R about the x- and y-axes are known to be and Evaluate the integral
where in terms of and
26. Zero curl, yet field not conservative Show that the curl of
F =
-y
x2+ y2 i +
x
x2+ y2 j + zk
Iy.Ixr = 2x2+ y2,
FC
§sr4d # n ds,
Iy.Ix is zero but that
is not zero if C is the circle in the xy-plane. (Theo-rem 6 does not apply here because the domain of F is not simplyconnected. The field F is not defined along the z-axis so there isno way to contract C to a point without leaving the domain of F.)
x2+ y2
= 1
FC
F # dr
1211
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1211
16.7 Stokes’ Theorem
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufi16.8 The Divergence Theorem and a Unified Theory 1211
The Divergence Theorem and a Unified Theory
The divergence form of Green’s Theorem in the plane states that the net outward flux of avector field across a simple closed curve can be calculated by integrating the divergence ofthe field over the region enclosed by the curve. The corresponding theorem in threedimensions, called the Divergence Theorem, states that the net outward flux of a vector fieldacross a closed surface in space can be calculated by integrating the divergence of the fieldover the region enclosed by the surface. In this section, we prove the Divergence Theoremand show how it simplifies the calculation of flux. We also derive Gauss’s law for flux in anelectric field and the continuity equation of hydrodynamics. Finally, we unify the chapter’svector integral theorems into a single fundamental theorem.
Divergence in Three Dimensions
The divergence of a vector field is the scalarfunction
(1)
The symbol “div F” is read as “divergence of F” or “div F.” The notation is read “deldot F.”
Div F has the same physical interpretation in three dimensions that it does in two. If Fis the velocity field of a fluid flow, the value of div F at a point (x, y, z) is the rate at whichfluid is being piped in or drained away at (x, y, z). The divergence is the flux per unit volumeor flux density at the point.
EXAMPLE 1 Finding Divergence
Find the divergence of
Solution The divergence of F is
§# F =
0
0x s2xzd +
0
0y s -xyd +
0
0z s -zd = 2z - x - 1.
F = 2xzi - xyj - zk.
§# F
div F = §# F =
0M0x +
0N0y +
0P0z .
F = Msx, y, zdi + Nsx, y, zdj + Psx, y, zdk
16.8
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1211
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiDivergence Theorem
The Divergence Theorem says that under suitable conditions, the outward flux of a vectorfield across a closed surface (oriented outward) equals the triple integral of the divergenceof the field over the region enclosed by the surface.
1212 Chapter 16: Integration in Vector Fields
THEOREM 7 Divergence TheoremThe flux of a vector field F across a closed oriented surface S in the direction ofthe surface’s outward unit normal field n equals the integral of over theregion D enclosed by the surface:
(2)
Outward Divergenceflux integral
6S
F # n ds = 9D
§# F dV.
§# F
EXAMPLE 2 Supporting the Divergence Theorem
Evaluate both sides of Equation (2) for the field over the sphere
Solution The outer unit normal to S, calculated from the gradient of is
Hence,
because on the surface. Therefore,
The divergence of F is
so
EXAMPLE 3 Finding Flux
Find the flux of outward through the surface of the cube cut fromthe first octant by the planes and z = 1.x = 1, y = 1,
F = xyi + yzj + xzk
9D
§
# F dV = 9D
3 dV = 3 a4
3 pa3b = 4pa3.
§# F =
0
0x sxd +
0
0y s yd +
0
0z szd = 3,
6S
F # n ds = 6S
a ds = a6S
ds = as4pa2d = 4pa3.
x2+ y2
+ z2= a2
F # n ds =
x2+ y2
+ z2
a ds =
a2
a ds = a ds
n =
2sxi + yj + zkd24sx2+ y2
+ z2d=
xi + yj + zka .
y2+ z2
- a2,ƒsx, y, zd = x2
+
x2+ y2
+ z2= a2.
F = xi + yj + zk
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1212
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSolution Instead of calculating the flux as a sum of six separate integrals, one for eachface of the cube, we can calculate the flux by integrating the divergence
over the cube’s interior:
Proof of the Divergence Theorem for Special Regions
To prove the Divergence Theorem, we assume that the components of F have continuousfirst partial derivatives. We also assume that D is a convex region with no holes or bubbles,such as a solid sphere, cube, or ellipsoid, and that S is a piecewise smooth surface. Inaddition, we assume that any line perpendicular to the xy-plane at an interior point of theregion that is the projection of D on the xy-plane intersects the surface S in exactly twopoints, producing surfaces
with We make similar assumptions about the projection of D onto the othercoordinate planes. See Figure 16.69.
The components of the unit normal vector are the cosines ofthe angles and that n makes with i, j, and k (Figure 16.70). This is true because allthe vectors involved are unit vectors. We have
Thus,
and
In component form, the Divergence Theorem states that
6S
sM cos a + N cos b + P cos gd ds = 9D
a0M0x +
0N0y +
0P0z b dx dy dz.
F # n = M cos a + N cos b + P cos g.
n = scos adi + scos b dj + scos gdk
n3 = n # k = ƒ n ƒ ƒ k ƒ cos g = cos g
n2 = n # j = ƒ n ƒ ƒ j ƒ cos b = cos b
n1 = n # i = ƒ n ƒ ƒ i ƒ cos a = cos a
ga, b,n = n1i + n2j + n3k
ƒ1 … ƒ2.
S2: z = ƒ2sx, yd, sx, yd in Rxy,
S1: z = ƒ1sx, yd, sx, yd in Rxy
Rxy
= L1
0 L
1
0 L
1
0 sx + y + zd dx dy dz =
32
.
Flux = 6Cube
surface
F # n ds = 9Cube
interior
§
# F dV
§# F =
0
0x sxyd +0
0y s yzd +0
0z sxzd = y + z + x
16.8 The Divergence Theorem and a Unified Theory 1213
The DivergenceTheorem
Routine integration
y
z
x
D
Rxy
S2
S1
RyzRxz
FIGURE 16.69 We first prove theDivergence Theorem for the kind of three-dimensional region shown here. We thenextend the theorem to other regions.
y
z
x
n
k
ji
n3
n2n1
�
�
�
(n1, n2, n3)
FIGURE 16.70 The scalar components ofthe unit normal vector n are the cosines ofthe angles and that it makes with i,j, and k.
ga, b,
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1213
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWe prove the theorem by proving the three following equalities:
(3)
(4)
(5)
Proof of Equation (5) We prove Equation (5) by converting the surface integral on theleft to a double integral over the projection of D on the xy-plane (Figure 16.71). Thesurface S consists of an upper part whose equation is and a lower part whose equation is On the outer normal n has a positive k-componentand
See Figure 16.72. On the outer normal n has a negative k-component and
Therefore,
This proves Equation (5).
The proofs for Equations (3) and (4) follow the same pattern; or just permutein order, and get those results from Equation (5).
Divergence Theorem for Other Regions
The Divergence Theorem can be extended to regions that can be partitioned into a finitenumber of simple regions of the type just discussed and to regions that can be defined aslimits of simpler regions in certain ways. For example, suppose that D is the regionbetween two concentric spheres and that F has continuously differentiable componentsthroughout D and on the bounding surfaces. Split D by an equatorial plane and apply the
x, y, z; M, N, P; a, b, g,
= 6Rxy
cLƒ2sx,yd
ƒ1sx,yd 0P0z dz d dx dy = 9
D
0P0z dz dx dy.
= 6Rxy
[Psx, y, ƒ2sx, ydd - Psx, y, ƒ1sx, ydd] dx dy
= 6Rxy
Psx, y, ƒ2sx, ydd dx dy - 6Rxy
Psx, y, ƒ1sx, ydd dx dy
6S
P cos g ds = 6S2
P cos g ds + 6S1
P cos g ds
cos g ds = -dx dy.
S1,
cos g ds = dx dy because ds =
dAƒ cos g ƒ
=
dx dycos g.
S2,z = ƒ1sx, yd.S1z = ƒ2sx, ydS2
Rxy
6S
P cos g ds = 9
D
0P0z dx dy dz
6S
N cos b ds = 9
D
0N0y dx dy dz
6S
M cos a ds = 9
D
0M0x dx dy dz
1214 Chapter 16: Integration in Vector Fields
y
z
x
O n
d�
d�
nD z � f2(x, y)
S2
S1
z � f1(x, y)
dA � dx dy
Rxy
FIGURE 16.71 The three-dimensionalregion D enclosed by the surfaces and shown here projects vertically onto a two-dimensional region in the xy-plane.Rxy
S2S1
dxdy
n
k
n
k
Here � is acute, sod� � dx dy/cos �.
Here � is obtuse, so d� � –dx dy/cos �.
�
�
FIGURE 16.72 An enlarged view of the area patches in Figure 16.71. Therelations are derivedin Section 16.5.
ds = ;dx dy>cos g
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1214
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiDivergence Theorem to each half separately. The bottom half, is shown in Figure 16.73.The surface that bounds consists of an outer hemisphere, a plane washer-shaped base,and an inner hemisphere. The Divergence Theorem says that
(6)
The unit normal that points outward from points away from the origin along theouter surface, equals k along the flat base, and points toward the origin along the inner sur-face. Next apply the Divergence Theorem to and its surface (Figure 16.74):
(7)
As we follow over pointing outward from we see that equals along thewasher-shaped base in the xy-plane, points away from the origin on the outer sphere, andpoints toward the origin on the inner sphere. When we add Equations (6) and (7), the inte-grals over the flat base cancel because of the opposite signs of and We thus arrive atthe result
with D the region between the spheres, S the boundary of D consisting of two spheres, andn the unit normal to S directed outward from D.
EXAMPLE 4 Finding Outward Flux
Find the net outward flux of the field
across the boundary of the region .
Solution The flux can be calculated by integrating over D. We have
and
Similarly,
Hence,
div F =
3r3 -
3r5 sx2
+ y2+ z2d =
3r3 -
3r2
r5 = 0
0N0y =
1r3 -
3y2
r5 and 0P0z =
1r3 -
3z2
r5 .
0M0x =
0
0x sxr-3d = r-3- 3xr-4
0r
0x =1r3 -
3x2
r5 .
0r
0x =12
sx2+ y2
+ z2d-1>2s2xd =
xr
§# F
D: 0 6 a2… x2
+ y2+ z2
… b2
F =
xi + yj + zk
r3 , r = 2x2+ y2
+ z2
6S
F # n ds = 9D
§ # F dV,
n2 .n1
-kn2D2 ,S2 ,n2
6S2
F # n2 ds2 = 9D2
§ # F dV2 .
S2D2,
D1n1
6S1
F # n1 ds1 = 9D1
§ # F dV1 .
D1S1
D1,
16.8 The Divergence Theorem and a Unified Theory 1215
z
x
y
k
O
n1D1
FIGURE 16.73 The lower half of thesolid region between two concentricspheres.
z
x
y
D2
n2
–k
FIGURE 16.74 The upper half of thesolid region between two concentricspheres.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1215
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiand
So the integral of over D is zero and the net outward flux across the boundary ofD is zero. There is more to learn from this example, though. The flux leaving D across theinner sphere is the negative of the flux leaving D across the outer sphere (becausethe sum of these fluxes is zero). Hence, the flux of F across in the direction away fromthe origin equals the flux of F across in the direction away from the origin. Thus, theflux of F across a sphere centered at the origin is independent of the radius of the sphere.What is this flux?
To find it, we evaluate the flux integral directly. The outward unit normal on thesphere of radius a is
Hence, on the sphere,
and
The outward flux of F across any sphere centered at the origin is
Gauss’s Law: One of the Four Great Lawsof Electromagnetic Theory
There is still more to be learned from Example 4. In electromagnetic theory, the electricfield created by a point charge q located at the origin is
where is a physical constant, r is the position vector of the point (x, y, z), andIn the notation of Example 4,
The calculations in Example 4 show that the outward flux of E across any spherecentered at the origin is but this result is not confined to spheres. The outward fluxof E across any closed surface S that encloses the origin (and to which the DivergenceTheorem applies) is also To see why, we have only to imagine a large sphere centered at the origin and enclosing the surface S. Since
§# E = §
#q
4pP0 F =
q4pP0
§# F = 0
Saq>P0.
q>P0,
E =
q4pP0
F.
r = ƒ r ƒ = 2x2+ y2
+ z2.P0
Esx, y, zd =1
4pP0
q
ƒ r ƒ2 a r
ƒ r ƒ
b =
q4pP0
r
ƒ r ƒ3 =
q4pP0
xi + yj + zk
r3 ,
4p.
6Sa
F # n ds =1a26
Sa
ds =1a2 s4pa2d = 4p.
F # n =
xi + yj + zk
a3#xi + yj + zk
a =
x2+ y2
+ z2
a4 =
a2
a4 =1a2
n =
xi + yj + zk2x2+ y2
+ z2=
xi + yj + zka .
Sb
Sa
SbSa
§# F
9D
§ # F dV = 0.
1216 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1216
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwhen the integral of over the region D between S and is zero. Hence, bythe Divergence Theorem,
and the flux of E across S in the direction away from the origin must be the same as theflux of E across in the direction away from the origin, which is This statement,called Gauss’s Law, also applies to charge distributions that are more general than the oneassumed here, as you will see in nearly any physics text.
Continuity Equation of Hydrodynamics
Let D be a region in space bounded by a closed oriented surface S. If v(x, y, z) is the velocityfield of a fluid flowing smoothly through is the fluid’s density at (x, y, z)at time t, and then the continuity equation of hydrodynamics states that
If the functions involved have continuous first partial derivatives, the equation evolvesnaturally from the Divergence Theorem, as we now see.
First, the integral
is the rate at which mass leaves D across S (leaves because n is the outer normal). To seewhy, consider a patch of area on the surface (Figure 16.75). In a short time interval the volume of fluid that flows across the patch is approximately equal to the volume ofa cylinder with base area and height where v is a velocity vector rooted at apoint of the patch:
The mass of this volume of fluid is about
so the rate at which mass is flowing out of D across the patch is about
This leads to the approximation
a¢m
¢tL adv # n ¢s
¢m¢t
L dv # n ¢s.
¢m L dv # n ¢s ¢t,
¢V L v # n ¢s ¢t.
sv¢td # n,¢s
¢V¢t,¢s
6S
F # n ds
§# F +
0d0t = 0.
F = dv,D, d = dst, x, y, zd
Gauss’s law: 6S
E # n ds =
qP0
q>P0.Sa
6Boundary
of D
E # n ds = 0,
Sa§# Er 7 0 ,
16.8 The Divergence Theorem and a Unified Theory 1217
n
S
h � (v ∆ t) . nv ∆ t
��
FIGURE 16.75 The fluid that flowsupward through the patch in a shorttime fills a “cylinder” whose volume isapproximately v # n ¢s ¢t.
base * height =
¢t¢s
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1217
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufias an estimate of the average rate at which mass flows across S. Finally, letting and gives the instantaneous rate at which mass leaves D across S as
which for our particular flow is
Now let B be a solid sphere centered at a point Q in the flow. The average value ofover B is
It is a consequence of the continuity of the divergence that actually takes on thisvalue at some point P in B. Thus,
(8)
The fraction on the right describes decrease in mass per unit volume.Now let the radius of B approach zero while the center Q stays fixed. The left side of
Equation (8) converges to the right side to The equality of these twolimits is the continuity equation
The continuity equation “explains” The divergence of F at a point is the rate atwhich the density of the fluid is decreasing there.
The Divergence Theorem
now says that the net decrease in density of the fluid in region D is accounted for by themass transported across the surface S. So, the theorem is a statement about conservation ofmass (Exercise 31).
Unifying the Integral Theorems
If we think of a two-dimensional field as a three-dimensionalfield whose k-component is zero, then and the normal formof Green’s Theorem can be written as
FC
F # n ds = 6R
a0M0x +
0N0y b dx dy = 6
R
§ # F dA.
§# F = s0M>0xd + s0N>0yd
F = Msx, ydi + Nsx, ydj
6S
F # n ds = 9D
§ # F dV
§# F:
§# F = -
0d0t .
s -0d>0tdQ.s§# FdQ,
=
rate at which mass leaves B across its surface Svolume of B
s§# FdP =
1volume of B
9B
§ # F dV =
6S
F # n ds
volume of B
§# F
1volume of B
9B
§ # F dV.
§# F
dmdt
= 6S
F # n ds.
dmdt
= 6S
dv # n ds,
¢t : 0¢s: 0
1218 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1218
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSimilarly, so the tangential form of Green’s Theoremcan be written as
With the equations of Green’s Theorem now in del notation, we can see their relationshipsto the equations in Stokes’ Theorem and the Divergence Theorem.
FC
F # dr = 6R
a0N0x -
0M0y b dx dy = 6
R
§ * F # k dA.
§ * F # k = s0N>0xd - s0M>0yd,
16.8 The Divergence Theorem and a Unified Theory 1219
Green’s Theorem and Its Generalization to Three Dimensions
Normal form of Green’s Theorem:
Divergence Theorem:
Tangential form of Green’s Theorem:
Stokes’Theorem: FC
F # dr = 6S
§ * F # n ds
FC
F # dr = 6R
§ * F # k dA
6S
F # n ds = 9D
§ # F dV
FC
F # n ds = 6R
§ # F dA
Notice how Stokes’Theorem generalizes the tangential (curl) form of Green’s Theoremfrom a flat surface in the plane to a surface in three-dimensional space. In each case, theintegral of the normal component of curl F over the interior of the surface equals the circu-lation of F around the boundary.
Likewise, the Divergence Theorem generalizes the normal (flux) form of Green’sTheorem from a two-dimensional region in the plane to a three-dimensional region inspace. In each case, the integral of over the interior of the region equals the totalflux of the field across the boundary.
There is still more to be learned here. All these results can be thought of as forms of asingle fundamental theorem. Think back to the Fundamental Theorem of Calculus inSection 5.3. It says that if ƒ(x) is differentiable on (a, b) and continuous on [a, b], then
If we let throughout [a, b], then If we define the unit vectorfield n normal to the boundary of [a, b] to be i at b and at a (Figure 16.76), then
The Fundamental Theorem now says that
Fsbd # n + Fsad # n = 3[a,b]
§ # F dx.
= total outward flux of F across the boundary of [a, b].
= Fsbd # n + Fsad # n
ƒsbd - ƒsad = ƒsbdi # sid + ƒsadi # s - id
- isdƒ>dxd = §
# F.F = ƒsxdi
Lb
a dƒdx
dx = ƒsbd - ƒsad.
§# F
xa b
n � –i n � i
FIGURE 16.76 The outward unit normalsat the boundary of [a, b] in one-dimensionalspace.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1219
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe Fundamental Theorem of Calculus, the normal form of Green’s Theorem, and the Di-vergence Theorem all say that the integral of the differential operator operating on afield F over a region equals the sum of the normal field components over the boundary ofthe region. (Here we are interpreting the line integral in Green’s Theorem and the surfaceintegral in the Divergence Theorem as “sums” over the boundary.)
Stokes’ Theorem and the tangential form of Green’s Theorem say that, when thingsare properly oriented, the integral of the normal component of the curl operating on a fieldequals the sum of the tangential field components on the boundary of the surface.
The beauty of these interpretations is the observance of a single unifying principle,which we might state as follows.
§#
1220 Chapter 16: Integration in Vector Fields
The integral of a differential operator acting on a field over a region equals thesum of the field components appropriate to the operator over the boundary of theregion.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1220
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufi1220 Chapter 16: Integration in Vector Fields
EXERCISES 16.8
Calculating DivergenceIn Exercises 1–4, find the divergence of the field.
1. The spin field in Figure 16.14.
2. The radial field in Figure 16.13.
3. The gravitational field in Figure 16.9.
4. The velocity field in Figure 16.12.
Using the Divergence Theorem to CalculateOutward FluxIn Exercises 5–16, use the Divergence Theorem to find the outwardflux of F across the boundary of the region D.
5. Cube
D: The cube bounded by the planes and
6.
a. Cube D: The cube cut from the first octant by the planesand
b. Cube D: The cube bounded by the planes and
c. Cylindrical can D: The region cut from the solid cylinderby the planes and
7. Cylinder and paraboloid
D: The region inside the solid cylinder between theplane and the paraboloid z = x2
+ y2z = 0x2
+ y2… 4
F = yi + xyj - zk
z = 1z = 0x2
+ y2… 4
z = ;1y = ;1 ,x = ;1,
z = 1x = 1, y = 1 ,
F = x2i + y2j + z2k
z = ;1x = ;1, y = ;1 ,
F = s y - xdi + sz - ydj + s y - xdk
8. Sphere
D: The solid sphere
9. Portion of sphere
D: The region cut from the first octant by the sphere
10. Cylindrical can
D: The region cut from the first octant by the cylinder and the plane
11. Wedge
D: The wedge cut from the first octant by the plane and the elliptical cylinder
12. Sphere
D: The solid sphere
13. Thick sphere
D: The region
14. Thick sphere
D: The region
15. Thick sphere
D: The solid region between the spheres and
16. Thick cylinder
D: The thick-walled cylinder 1 … x2+ y2
… 2, -1 … z … 2
z2x 2+ y 2 k
F = ln sx 2+ y 2di - a2z
x tan-1 yx b j +
x2+ y2
+ z2= 2
x2+ y2
+ z2= 1
s5z3+ e y cos zdk
F = s5x3+ 12xy2di + s y3
+ ey sin zdj +
1 … x2+ y2
+ z2… 4
F = sxi + yj + zkd>2x2+ y2
+ z2
1 … x2+ y2
+ z2… 2
F = 2x2+ y2
+ z2 sxi + yj + zkdx2
+ y2+ z2
… a2
F = x3i + y3j + z3k
4x2+ y2
= 16y + z = 4
F = 2xzi - xyj - z2k
z = 34x2
+ y2=
F = s6x2+ 2xydi + s2y + x2zdj + 4x2y3k
z2= 4
x2+ y2
+
F = x2i - 2xyj + 3xzk
x2+ y2
+ z2… 4
F = x2i + xzj + 3zk
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1220
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiProperties of Curl and Divergence17. div (curl G ) is zero
a. Show that if the necessary partial derivatives of the compo-nents of the field are continuous, then
b. What, if anything, can you conclude about the flux of thefield across a closed surface? Give reasons for youranswer.
18. Let and be differentiable vector fields and let a and b bearbitrary real constants. Verify the following identities.
a.
b.
c.
19. Let F be a differentiable vector field and let g(x, y, z) be a differ-entiable scalar function. Verify the following identities.
a.
b.
20. If is a differentiable vector field, we definethe notation to mean
For differentiable vector fields and verify the followingidentities.
a.
b.
Theory and Examples21. Let F be a field whose components have continuous first partial
derivatives throughout a portion of space containing a region Dbounded by a smooth closed surface S. If can anybound be placed on the size of
Give reasons for your answer.
22. The base of the closed cubelike surface shown here is the unitsquare in the xy-plane. The four sides lie in the planes
and The top is an arbitrary smoothsurface whose identity is unknown. Let and suppose the outward flux of F through side A is 1 and throughside B is Can you conclude anything about the outward fluxthrough the top? Give reasons for your answer.
-3 .
F = xi - 2yj + sz + 3dky = 1 .x = 0, x = 1, y = 0 ,
9D
§ # F dV ?
ƒ F ƒ … 1 ,
F2 * s§ * F1d§sF1
# F2d = sF1#§dF2 + sF2
#§dF1 + F1 * s§ * F2d +
s§# F1dF2
s§# F2dF1 -§ * sF1 * F2d = sF2
#§dF1 - sF1
#§dF2 +
F2 ,F1
M 0
0x + N 0
0y + P 0
0z .
F #§
F = Mi + Nj + Pk
§ * sgFd = g§ * F + §g * F
§# sgFd = g§
# F + §g # F
§# sF1 * F2d = F2
#§ * F1 - F1
#§ * F2
§ * saF1 + bF2d = a§ * F1 + b§ * F2
§# saF1 + bF2d = a§
# F1 + b§# F2
F2F1
§ * G
§#§ * G = 0 .
G = Mi + Nj + Pk
23. a. Show that the flux of the position vector field outward through a smooth closed surface S is
three times the volume of the region enclosed by the surface.
b. Let n be the outward unit normal vector field on S. Show thatit is not possible for F to be orthogonal to n at every point ofS.
24. Maximum flux Among all rectangular solids defined by theinequalities find the onefor which the total flux of outward through the six sides is greatest. What is the greatestflux?
25. Volume of a solid region Let and supposethat the surface S and region D satisfy the hypotheses of theDivergence Theorem. Show that the volume of D is given by theformula
26. Flux of a constant field Show that the outward flux of aconstant vector field across any closed surface to whichthe Divergence Theorem applies is zero.
27. Harmonic functions A function ƒ(x, y, z) is said to be har-monic in a region D in space if it satisfies the Laplace equation
throughout D.
a. Suppose that ƒ is harmonic throughout a bounded region Denclosed by a smooth surface S and that n is the chosen unitnormal vector on S. Show that the integral over S of the derivative of ƒ in the direction of n, is zero.
b. Show that if ƒ is harmonic on D, then
6S
ƒ §ƒ # n ds = 9D
ƒ §ƒ ƒ2 dV.
§ƒ # n,
§2ƒ = §
#§ƒ =
02ƒ
0x2 +
02ƒ
0y2 +
02ƒ
0z2 = 0
F = C
Volume of D =
13
6S
F # n ds.
F = xi + yj + zk
F = s -x2- 4xydi - 6yzj + 12zk
0 … x … a, 0 … y … b, 0 … z … 1 ,
xi + yj + zkF =
z
x
y
(1, 1, 0)
1
1
Top
Side BSide A
16.8 The Divergence Theorem and a Unified Theory 1221
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1221
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi28. Flux of a gradient field Let S be the surface of the portion ofthe solid sphere that lies in the first octantand let Calculate
( is the derivative of ƒ in the direction of n.)
29. Green’s first formula Suppose that ƒ and g are scalar functionswith continuous first- and second-order partial derivativesthroughout a region D that is bounded by a closed piecewise-smooth surface S. Show that
(9)
Equation (9) is Green’s first formula. (Hint: Apply the Diver-gence Theorem to the field )
30. Green’s second formula (Continuation of Exercise 29.) Inter-change ƒ and g in Equation (9) to obtain a similar formula. Thensubtract this formula from Equation (9) to show that
(10)
This equation is Green’s second formula.
31. Conservation of mass Let v(t, x, y, z) be a continuously differ-entiable vector field over the region D in space and let p(t, x, y, z)be a continuously differentiable scalar function. The variable trepresents the time domain. The Law of Conservation of Massasserts that
where S is the surface enclosing D.
ddt
9D
pst, x, y, zd dV = -6S
pv # n ds,
6S
sƒ §g - g§ƒd # n ds = 9D
sƒ §2g - g§2ƒd dV.
F = ƒ §g.
6S
ƒ §g # n ds = 9D
sƒ §2g + §ƒ #§gd dV.
§ƒ # n
6S
§ƒ # n ds.
ƒsx, y, zd = ln2x2+ y2
+ z2.x2
+ y2+ z2
… a2a. Give a physical interpretation of the conservation of mass law
if v is a velocity flow field and p represents the density of thefluid at point (x, y, z) at time t.
b. Use the Divergence Theorem and Leibniz’s Rule,
to show that the Law of Conservation of Mass is equivalent to thecontinuity equation,
(In the first term the variable t is held fixed, and in thesecond term it is assumed that the point (x, y, z) in D isheld fixed.)
32. The heat diffusion equation Let T(t, x, y, z) be a function withcontinuous second derivatives giving the temperature at time t atthe point (x, y, z) of a solid occupying a region D in space. If thesolid’s heat capacity and mass density are denoted by the con-stants c and respectively, the quantity is called the solid’sheat energy per unit volume.
a. Explain why points in the direction of heat flow.
b. Let denote the energy flux vector. (Here the constantk is called the conductivity.) Assuming the Law ofConservation of Mass with and inExercise 31, derive the diffusion (heat) equation
where is the diffusivity constant. (Noticethat if T(t, x) represents the temperature at time t at position xin a uniform conducting rod with perfectly insulated sides,then and the diffusion equation reduces to theone-dimensional heat equation in Chapter 14’s AdditionalExercises.)
§2T = 0
2T>0x2
K = k>scrd 7 0
0T0t = K§
2T,
crT = p-k§T = v
-k§T
- §T
crTr ,
0p>0t ,§
# pv,
§# pv +
0p0t = 0.
ddt
9D
pst, x, y, zd dV = 9D
0p0t dV,
1222 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1222
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Yousufi1222 Chapter 16: Integration in Vector Fields
Chapter 16 Questions to Guide Your Review
1. What are line integrals? How are they evaluated? Give examples.
2. How can you use line integrals to find the centers of mass ofsprings? Explain.
3. What is a vector field? A gradient field? Give examples.
4. How do you calculate the work done by a force in moving a particlealong a curve? Give an example.
5. What are flow, circulation, and flux?
6. What is special about path independent fields?
7. How can you tell when a field is conservative?
8. What is a potential function? Show by example how to find a po-tential function for a conservative field.
9. What is a differential form? What does it mean for such a form tobe exact? How do you test for exactness? Give examples.
10. What is the divergence of a vector field? How can you interpret it?
11. What is the curl of a vector field? How can you interpret it?
12. What is Green’s theorem? How can you interpret it?
13. How do you calculate the area of a curved surface in space? Givean example.
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1222
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi14. What is an oriented surface? How do you calculate the flux of athree-dimensional vector field across an oriented surface? Givean example.
15. What are surface integrals? What can you calculate with them?Give an example.
16. What is a parametrized surface? How do you find the area of sucha surface? Give examples.
17. How do you integrate a function over a parametrized surface?Give an example.
18. What is Stokes’ Theorem? How can you interpret it?
19. Summarize the chapter’s results on conservative fields.
20. What is the Divergence Theorem? How can you interpret it?
21. How does the Divergence Theorem generalize Green’s Theorem?
22. How does Stokes’ Theorem generalize Green’s Theorem?
23. How can Green’s Theorem, Stokes’ Theorem, and the DivergenceTheorem be thought of as forms of a single fundamental theorem?
Chapter 16 1223
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1223
Questions to Guide Your Review
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hass
an Riaz Yousufi
Chapter 16 Practice Exercises 1223
Chapter 16 Practice Exercises
Evaluating Line Integrals1. The accompanying figure shows two polygonal paths in space
joining the origin to the point (1, 1, 1). Integrate over each path.
2. The accompanying figure shows three polygonal paths joining theorigin to the point (1, 1, 1). Integrate over each path.
3. Integrate over the circle
rstd = sa cos tdj + sa sin tdk, 0 … t … 2p.
ƒsx, y, zd = 2x2+ z2
z
y
x
(0, 0, 0) (1, 1, 1)
(1, 1, 0)
(1, 0, 0)
z
y
x
(0, 0, 0) (1, 1, 1)
(1, 1, 0)
z
y
x
(0, 0, 0)(1, 1, 1)
(0, 1, 1)(0, 0, 1) C6
C5 C7
C2
C1 C3 C3C4
ƒsx, y, zd = x2+ y - z
z
y
x
(0, 0, 0) (1, 1, 1)
(1, 1, 0)
Path 1
z
y
x
(0, 0, 0) (1, 1, 1)
(1, 1, 0)
Path 2
3y2- 2z + 3
ƒsx, y, zd = 2x -
4. Integrate over the involute curve
Evaluate the integrals in Exercises 5 and 6.
5.
6.
7. Integrate around thecircle cut from the sphere by the plane
clockwise as viewed from above.
8. Integrate around the circle cutfrom the sphere by the plane
Evaluate the integrals in Exercises 9 and 10.
9.
C is the square cut from the first quadrant by the lines and
10.
C is the circle
Evaluating Surface Integrals11. Area of an elliptical region Find the area of the elliptical
region cut from the plane by the cylinder
12. Area of a parabolic cap Find the area of the cap cut from theparaboloid by the plane
13. Area of a spherical cap Find the area of the cap cut from thetop of the sphere by the plane z = 22>2.x2
+ y2+ z2
= 1
x = 1.y2+ z2
= 3x
x2+ y2
= 1.x + y + z = 1
x2+ y2
= 4.LC
y2 dx + x2 dy
y = p>2 .x = p>2
LC 8x sin y dx - 8y cos x dy
x = 2.x2+ y2
+ z2= 9
F = 3x2yi + sx3+ 1dj + 9z2k
z = -1,x2
+ y2+ z2
= 5F = -s y sin zdi + sx sin zdj + sxy cos zdk
Ls10,3,3d
s1,1,1d dx - A z
y dy - Ayz dz
Ls4,-3,0d
s-1,1,1d dx + dy + dz2x + y + z
rstd = scos t + t sin tdi + ssin t - t cos tdj, 0 … t … 23.
ƒsx, y, zd = 2x2+ y2
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1223
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi14. a. Hemisphere cut by cylinder Find the area of the surfacecut from the hemisphere by thecylinder
b. Find the area of the portion of the cylinder that lies inside thehemisphere. (Hint: Project onto the xz-plane. Or evaluate theintegral where h is the altitude of the cylinder and dsis the element of arc length on the circle in thexy-plane.)
15. Area of a triangle Find the area of the triangle in which theplane intersects thefirst octant. Check your answer with an appropriate vector calcula-tion.
16. Parabolic cylinder cut by planes Integrate
a. b.
over the surface cut from the parabolic cylinder bythe planes and
17. Circular cylinder cut by planes Integrate over the portion of the cylinder that
lies in the first octant between the planes and andabove the plane
18. Area of Wyoming The state of Wyoming is bounded by themeridians and west longitude and by the circles41° and 45° north latitude. Assuming that Earth is a sphere of ra-dius find the area of Wyoming.
Parametrized SurfacesFind the parametrizations for the surfaces in Exercises 19–24. (Thereare many ways to do these, so your answers may not be the same asthose in the back of the book.)
19. Spherical band The portion of the sphere between the planes and
20. Parabolic cap The portion of the paraboloid above the plane z = -2
-sx2+ y2d>2z =
z = 323z = -3x2
+ y2+ z2
= 36
R = 3959 mi,
104°3¿111°3¿
z = 3.x = 1x = 0
y2+ z2
= 25x4ysy2+ z2d
gsx, y, zd =
z = 0.x = 0, x = 3 ,y2
- z = 1
gsx, y, zd =
z24y2+ 1
gsx, y, zd =
yz24y2+ 1
sx>ad + sy>bd + sz>cd = 1 sa, b, c 7 0d
z
x
yCylinder r � 2 cos �
Hemisphere
z � �4 � r2
0
x2+ y2
= 2x1h ds,
x2+ y2
= 2x.x2
+ y2+ z2
= 4, z Ú 0,21. Cone The cone
22. Plane above square The portion of the plane that lies above the square in the first
quadrant
23. Portion of paraboloid The portion of the paraboloid that lies above the xy-plane
24. Portion of hemisphere The portion of the hemisphere in the first octant
25. Surface area Find the area of the surface
26. Surface integral Integrate over thesurface in Exercise 25.
27. Area of a helicoid Find the surface area of the helicoid
in the accompanying figure.
28. Surface integral Evaluate the integral where S is the helicoid in Exercise 27.
Conservative FieldsWhich of the fields in Exercises 29–32 are conservative, and whichare not?
29.
30.
31.
32.
Find potential functions for the fields in Exercises 33 and 34.
33.
34.
Work and CirculationIn Exercises 35 and 36, find the work done by each field along thepaths from (0, 0, 0) to (1, 1, 1) in Exercise 1.
F = sz cos xzdi + eyj + sx cos xzdkF = 2i + s2y + zdj + sy + 1dk
F = si + zj + ykd>sx + yzdF = xeyi + yezj + zexk
F = sxi + yj + zkd>sx2+ y2
+ z2d3>2F = xi + yj + zk
4S 2x2+ y2
+ 1 ds,
y
z
x
(1, 0, 0)
(1, 0, 2�)
2�
rsr, ud = (r cos u)i + (r sin u)j + uk, 0 … u … 2p, 0 … r … 1,
ƒsx, y, zd = xy - z2
0 … y … 1.0 … u … 1, rsu, yd = su + ydi + su - ydj + yk,
z2= 10, y Ú 0,
x2+ y2
+
y … 2,2sx2+ z2d,
y =
0 … x … 2, 0 … y … 2124x + 2y + 4z =
z = 1 + 2x2+ y2, z … 3
1224 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 9/2/04 11:18 AM Page 1224
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi35. 36.
37. Finding work in two ways Find the work done by
over the plane curve from the point(1, 0) to the point in two ways:
a. By using the parametrization of the curve to evaluate thework integral
b. By evaluating a potential function for F.
38. Flow along different paths Find the flow of the field
a. Once around the ellipse C in which the plane intersects the cylinder clockwise as viewedfrom the positive y-axis
b. Along the curved boundary of the helicoid in Exercise 27from (1, 0, 0) to
In Exercises 39 and 40, use the surface integral in Stokes’ Theorem tofind the circulation of the field F around the curve C in the indicateddirection.
39. Circulation around an ellipse
C: The ellipse in which the plane meets thecylinder counterclockwise as viewed from above
40. Circulation around a circle
C: The circle in which the plane meets the spherecounterclockwise as viewed from above
Mass and Moments41. Wire with different densities Find the mass of a thin wire
lying along the curve if the density at t is (a) and (b)
42. Wire with variable density Find the center of mass of a thin wirelying along the curve if the density at t is
43. Wire with variable density Find the center of mass and themoments of inertia and radii of gyration about the coordinate axesof a thin wire lying along the curve
if the density at t is
44. Center of mass of an arch A slender metal arch lies along thesemicircle in the xy-plane. The density at the point(x, y) on the arch is Find the center of mass.
45. Wire with constant density A wire of constant density lies along the curve
Find and Rz.z, Iz,ln 2.t …
0 …rstd = set cos tdi + set sin tdj + et k,d = 1
dsx, yd = 2a - y.y = 2a2
- x2
d = 1>st + 1d .
rstd = ti +
2223
t3>2j +
t2
2 k, 0 … t … 2,
d = 325 + t .rstd = ti + 2tj + s2>3dt3>2k, 0 … t … 2 ,
d = 1.d = 3t0 … t … 1,rstd = 22ti + 22tj + s4 - t2dk,
x2+ y2
+ z2= 4,
z = -y
s4y2- zdk
F = sx2+ ydi + sx + ydj +
x2+ y2
= 1,2x + 6y - 3z = 6
F = y2i - yj + 3z2k
s1, 0, 2pd.
x2+ z2
= 25,x + y + z = 1
§sx2zeydF =
se2p, 0drstd = set cos tdi + set sin tdj
F =
xi + yj
sx2+ y2d3>2
F = 2xyi + x2j + kF = 2xyi + j + x2k 46. Helical wire with constant density Find the mass and center ofmass of a wire of constant density that lies along the helix
47. Inertia, radius of gyration, center of mass of a shell Findand the center of mass of a thin shell of density
cut from the upper portion of the sphereby the plane
48. Moment of inertia of a cube Find the moment of inertiaabout the z-axis of the surface of the cube cut from the firstoctant by the planes and if the density is
Flux Across a Plane Curve or SurfaceUse Green’s Theorem to find the counterclockwise circulation andoutward flux for the fields and curves in Exercises 49 and 50.
49. Square
C: The square bounded by
50. Triangle
C: The triangle made by the lines and
51. Zero line integral Show that
for any closed curve C to which Green’s Theorem applies.
52. a. Outward flux and area Show that the outward flux of theposition vector field across any closed curve towhich Green’s Theorem applies is twice the area of the regionenclosed by the curve.
b. Let n be the outward unit normal vector to a closed curveto which Green’s Theorem applies. Show that it is notpossible for to be orthogonal to n at everypoint of C.
In Exercises 53–56, find the outward flux of F across the boundaryof D.
53. Cube
D: The cube cut from the first octant by the planes
54. Spherical cap
D: The entire surface of the upper cap cut from the solid sphereby the plane
55. Spherical cap
D: The upper region cut from the solid sphere by the paraboloid
56. Cone and cylinder
D: The region in the first octant bounded by the cone
the cylinder and the coordinateplanes
x2+ y2
= 1,z = 2x2+ y2,
F = s6x + ydi - sx + zdj + 4yzk
z = x2+ y2
z2… 2x2
+ y2+
F = -2xi - 3yj + zk
z = 3x2+ y2
+ z2… 25
F = xzi + yzj + k
z = 1x = 1, y = 1,
F = 2xyi + 2yzj + 2xzk
F = xi + yj
F = xi + yj
FC
ln x sin y dy -
cos yx dx = 0
x = 1y = 0, y = x ,
F = sy - 6x2di + sx + y2djx = 0, x = 1, y = 0, y = 1
F = s2xy + xdi + sxy - ydj
d = 1.z = 1x = 1, y = 1,
z = 3.x2+ y2
+ z2= 25
dsx, y, zd = zIz, Rz,
rstd = s2 sin tdi + s2 cos tdj + 3tk, 0 … t … 2p.d
Chapter 16 Practice Exercises 1225
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1225
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi57. Hemisphere, cylinder, and plane Let S be the surface that isbounded on the left by the hemisphere in the middle by the cylinder and onthe right by the plane Find the flux of outward across S.
58. Cylinder and planes Find the outward flux of the fieldacross the surface of the solid in the first
octant that is bounded by the cylinder and theplanes and z = 0.y = 2z, x = 0 ,
x2+ 4y2
= 16F = 3xz2i + yj - z3k
F = yi + zj + xky = a.x2
+ z2= a2, 0 … y … a,
x2+ y2
+ z2= a2, y … 0,
59. Cylindrical can Use the Divergence Theorem to find the fluxof outward through the surface of theregion enclosed by the cylinder and the planes
and
60. Hemisphere Find the flux of upward across thehemisphere (a) with the DivergenceTheorem and (b) by evaluating the flux integral directly.
x2+ y2
+ z2= a2, z Ú 0
F = s3z + 1dkz = -1.z = 1
x2+ y2
= 1F = xy2i + x2yj + yk
1226 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1226
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufi1226 Chapter 16: Integration in Vector Fields
Chapter 16 Additional and Advanced Exercises
Finding Areas with Green’s TheoremUse the Green’s Theorem area formula, Equation (13) in Exercises 16.4,to find the areas of the regions enclosed by the curves in Exercises 1–4.
1. The limaçon
2. The deltoid
y
x0 3
t … 2p0 …
y = 2 sin t - sin 2t,x = 2 cos t + cos 2t,
y
x0 1
t … 2p0 …
y = 2 sin t - sin 2t,x = 2 cos t - cos 2t,
3. The eight curve (one loop)
4. The teardrop
Theory and Applications5. a. Give an example of a vector field F (x, y, z) that has value 0
at only one point and such that curl F is nonzero everywhere.Be sure to identify the point and compute the curl.
y
x0
b
2a
x = 2a cos t - a sin 2t, y = b sin t, 0 … t … 2p
y
x
1
�1
0
x = s1>2d sin 2t, y = sin t, 0 … t … p
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1226
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufib. Give an example of a vector field F (x, y, z) that has value 0on precisely one line and such that curl F is nonzeroeverywhere. Be sure to identify the line and compute the curl.
c. Give an example of a vector field F (x, y, z) that has value 0on a surface and such that curl F is nonzero everywhere. Besure to identify the surface and compute the curl.
6. Find all points (a, b, c) on the sphere wherethe vector field is normal to thesurface and
7. Find the mass of a spherical shell of radius R such that at eachpoint (x, y, z) on the surface the mass density is itsdistance to some fixed point (a, b, c) of the surface.
8. Find the mass of a helicoid
if the density function is
See Practice Exercise 27 for a figure.
9. Among all rectangular regions find theone for which the total outward flux of across the four sides is least. What is the least flux?
10. Find an equation for the plane through the origin such that the cir-culation of the flow field around the circle ofintersection of the plane with the sphere is amaximum.
11. A string lies along the circle from (2, 0) to (0, 2) inthe first quadrant. The density of the string is
a. Partition the string into a finite number of subarcs to showthat the work done by gravity to move the string straightdown to the x-axis is given by
where g is the gravitational constant.
b. Find the total work done by evaluating the line integral in part(a).
c. Show that the total work done equals the work required tomove the string’s center of mass straight down to thex-axis.
12. A thin sheet lies along the portion of the plane inthe first octant. The density of the sheet is
a. Partition the sheet into a finite number of subpieces to showthat the work done by gravity to move the sheet straight downto the xy-plane is given by
where g is the gravitational constant.
b. Find the total work done by evaluating the surface integral inpart (a).
Work = limn: q
an
k = 1 g xk yk zk ¢sk = 6
S
g xyz ds,
d sx, y, zd = xy .x + y + z = 1
sx, yd
Work = limn: q
an
k = 1 g xk yk
2¢sk = LC
g xy2 ds,
r sx, yd = xyx2
+ y2= 4
x2+ y2
+ z2= 4
F = zi + xj + yk
F = sx2+ 4xydi - 6yj
0 … x … a, 0 … y … b ,
22x 2+ y 2.
dsx, y, zd =0 … r … 1, 0 … u … 2p ,
rsr, ud = sr cos udi + sr sin udj + uk,
dsx, y, zd
Fsa, b, cd Z 0.F = yz2i + xz2j + 2xyzk
x2+ y2
+ z2= R2
c. Show that the total work done equals the work required to movethe sheet’s center of mass straight down to the xy-plane.
13. Archimedes’ principle If an object such as a ball is placed in aliquid, it will either sink to the bottom, float, or sink a certain dis-tance and remain suspended in the liquid. Suppose a fluid hasconstant weight density w and that the fluid’s surface coincideswith the plane A spherical ball remains suspended in thefluid and occupies the region
a. Show that the surface integral giving the magnitude of thetotal force on the ball due to the fluid’s pressure is
b. Since the ball is not moving, it is being held up by thebuoyant force of the liquid. Show that the magnitude of thebuoyant force on the sphere is
where n is the outer unit normal at (x, y, z). This illustratesArchimedes’ principle that the magnitude of the buoyant forceon a submerged solid equals the weight of the displaced fluid.
c. Use the Divergence Theorem to find the magnitude of thebuoyant force in part (b).
14. Fluid force on a curved surface A cone in the shape of thesurface is filled with a liquid ofconstant weight density w. Assuming the xy-plane is “groundlevel,” show that the total force on the portion of the cone from
to due to liquid pressure is the surface integral
Evaluate the integral.
15. Faraday’s Law If E(t, x, y, z) and B(t, x, y, z) represent theelectric and magnetic fields at point (x, y, z) at time t, a basicprinciple of electromagnetic theory says that In this expression is computed with t held fixed and
is calculated with (x, y, z) fixed. Use Stokes’ Theorem toderive Faraday’s Law
where C represents a wire loop through which current flowscounterclockwise with respect to the surface’s unit normal n,giving rise to the voltage
around C. The surface integral on the right side of the equation iscalled the magnetic flux, and S is any oriented surface withboundary C.
FCE # dr
FCE # dr = -
0
0t 6S
B # n ds,
0B>0t§ * E
§ * E = -0B>0t.
F = 6S
ws2 - zd ds.
z = 2z = 1
z = 2x2+ y2, 0 … z … 2
Buoyant force = 6S
wsz - 4dk # n ds,
Force = limn: q a
n
k = 1ws4 - zkd ¢sk = 6
S
ws4 - zd ds.
x2+ y2
+ sz - 2d2… 1.
z = 4 .
sx, y, zd
Chapter 16 Additional and Advanced Exercises 1227
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1227
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi16. Let
be the gravitational force field defined for Use Gauss’sLaw in Section 16.8 to show that there is no continuously differ-entiable vector field H satisfying
17. If ƒ(x, y, z) and g(x, y, z) are continuously differentiable scalarfunctions defined over the oriented surface S with boundary curveC, prove that
18. Suppose that and over aregion D enclosed by the oriented surface S with outward unitnormal n and that on S. Prove that throughout D.
F1 = F2F1# n = F2
# n
§ * F1 = § * F2§# F1 = §
# F2
6S
s§ƒ * §gd # n ds = FC ƒ §g # dr.
F = § * H.
r Z 0.
F = -
GmM
ƒ r ƒ3 r
19. Prove or disprove that if and then
20. Let S be an oriented surface parametrized by r(u, y). Define thenotation so that is a vector normal to thesurface. Also, the magnitude is the element ofsurface area (by Equation 5 in Section 16.6). Derive the identity
where
21. Show that the volume V of a region D in space enclosed by theoriented surface S with outward normal n satisfies the identity
where r is the position vector of the point (x, y, z) in D.
V =
13
6S
r # n ds,
E = ƒ ru ƒ2, F = ru
# ry , and G = ƒ ry ƒ2.
ds = sEG - F2d1>2 du dy
ds = ƒ dS ƒ
dSdS = ru du * ry dy
F = 0.§ * F = 0,§# F = 0
1228 Chapter 16: Integration in Vector Fields
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1228
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
1228 Chapter 16: Integration in Vector Fields
Chapter 16 Technology Application Projects
Mathematica Maple ModuleWork in Conservative and Nonconservative Force FieldsExplore integration over vector fields and experiment with conservative and nonconservative force functions along different paths in the field.
Mathematica Maple ModuleHow Can You Visualize Green’s Theorem?Explore integration over vector fields and use parametrizations to compute line integrals. Both forms of Green’s Theorem are explored.
Mathematica Maple ModuleVisualizing and Interpreting the Divergence TheoremVerify the Divergence Theorem by formulating and evaluating certain divergence and surface integrals.
/
/
/
4100 AWL/Thomas_ch16p1143-1228 8/27/04 7:27 AM Page 1228
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
OVERVIEW In Section 4.8 we introduced differential equations of the form ,where is given and y is an unknown function of . When is continuous over some inter-val, we found the general solution by integration, . In Section 6.5 wesolved separable differential equations. Such equations arise when investigating exponen-tial growth or decay, for example. In this chapter we study some other types of first-orderdifferential equations. They involve only first derivatives of the unknown function.
y = 1ƒ(x) dx y(x)ƒxƒ
dy>dx = ƒ(x)
15-1
FIRST-ORDER
DIFFERENTIAL EQUATIONS
C h a p t e r
15
Solutions, Slope Fields, and Picard’s Theorem
We begin this section by defining general differential equations involving first derivatives.We then look at slope fields, which give a geometric picture of the solutions to such equa-tions. Finally we present Picard’s Theorem, which gives conditions under which first-orderdifferential equations have exactly one solution.
General First-Order Differential Equations and Solutions
A first-order differential equation is an equation
(1)
in which ƒ(x, y) is a function of two variables defined on a region in the xy-plane. Theequation is of first order because it involves only the first derivative dy dx (and nothigher-order derivatives). We point out that the equations
are equivalent to Equation (1) and all three forms will be used interchangeably in the text.A solution of Equation (1) is a differentiable function defined on an interval
I of x-values (perhaps infinite) such that
on that interval. That is, when y(x) and its derivative are substituted into Equation (1),the resulting equation is true for all x over the interval I. The general solution to a first-order differential equation is a solution that contains all possible solutions. The general
y¿sxd
ddx
ysxd = ƒsx, ysxdd
y = ysxd
y¿ = ƒsx, yd and ddx
y = ƒsx, yd ,
>
dydx
= ƒsx, yd
15.1
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufisolution always contains an arbitrary constant, but having this property doesn’t mean asolution is the general solution. That is, a solution may contain an arbitrary constant with-out being the general solution. Establishing that a solution is the general solution may re-quire deeper results from the theory of differential equations and is best studied in a moreadvanced course.
EXAMPLE 1 Show that every member of the family of functions
is a solution of the first-order differential equation
on the interval , where C is any constant.
Solution Differentiating gives
Thus we need only verify that for all
This last equation follows immediately by expanding the expression on the right-hand side:
Therefore, for every value of C, the function is a solution of the differentialequation.
As was the case in finding antiderivatives, we often need a particular rather than thegeneral solution to a first-order differential equation The particular solutionsatisfying the initial condition is the solution whose value is when
Thus the graph of the particular solution passes through the point in thexy-plane. A first-order initial value problem is a differential equation whose solution must satisfy an initial condition
EXAMPLE 2 Show that the function
is a solution to the first-order initial value problem
Solution The equation
is a first-order differential equation with ƒsx, yd = y - x.
dydx
= y - x
dydx
= y - x, ys0d = 23
.
y = sx + 1d - 13
ex
ysx0d = y0.y¿ = ƒsx, yd
sx0 , y0dx = x0.y0y = ysxdysx0d = y0
y¿ = ƒsx, yd.
y = C>x + 2
1x c2 - aCx + 2b d = 1
x a- Cx b = - C
x2 .
- Cx2 = 1
x c2 - aCx + 2b d .x H s0, q d ,
dydx
= C ddx
a1x b + 0 = - Cx2 .
y = C>x + 2
s0, q d
dydx
= 1x s2 - yd
y = Cx + 2
15-2 Chapter 15: First-Order Differential Equations
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiOn the left side of the equation:
On the right side of the equation:
The function satisfies the initial condition because
The graph of the function is shown in Figure 15.1.
Slope Fields: Viewing Solution Curves
Each time we specify an initial condition for the solution of a differential equa-tion the solution curve (graph of the solution) is required to pass through thepoint and to have slope there. We can picture these slopes graphically bydrawing short line segments of slope ƒ(x, y) at selected points (x, y) in the region of thexy-plane that constitutes the domain of ƒ. Each segment has the same slope as the solutioncurve through (x, y) and so is tangent to the curve there. The resulting picture is called aslope field (or direction field) and gives a visualization of the general shape of the solu-tion curves. Figure 15.2a shows a slope field, with a particular solution sketched into it inFigure 15.2b. We see how these line segments indicate the direction the solution curvetakes at each point it passes through.
ƒsx0 , y0dsx0 , y0dy¿ = ƒsx, yd,
ysx0d = y0
ys0d = csx + 1d - 13
ex dx = 0
= 1 - 13
= 23
.
y - x = sx + 1d - 13
ex - x = 1 - 13
ex .
dydx
= ddx
ax + 1 - 13
exb = 1 - 13
ex .
15.1 Solutions, Slope Fields, and Picard’s Theorem 15-3
–4 –2 2 4
–4
–3
–2
–1
1
2
x
y
0, 2
3
y � (x � 1) � ex13
FIGURE 15.1 Graph of the solution
to the differential
equation with initial
condition (Example 2).ys0d = 23
dy>dx = y - x ,
y = sx + 1d - 13
ex
0 2–2–4 4
2
4
–2
–4
0, 2
3
0 2–2–4 4
2
4
–2
–4
(a) (b)
x x
y y
FIGURE 15.2 (a) Slope field for (b) The particular solution
curve through the point (Example 2).a0, 23b
dy
dx= y - x .
Figure 15.3 shows three slope fields and we see how the solution curves behave byfollowing the tangent line segments in these fields.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
Constructing a slope field with pencil and paper can be quite tedious. All our exam-ples were generated by a computer.
The Existence of Solutions
A basic question in the study of first-order initial value problems concerns whether a solu-tion even exists. A second important question asks whether there can be more than one so-lution. Some conditions must be imposed to assure the existence of exactly one solution,as illustrated in the next example.
EXAMPLE 3 The initial value problem
has more than one solution. One solution is the constant function for which thegraph lies along the x-axis. A second solution is found by separating variables and inte-grating, as we did in Section 6.5. This leads to
.
The two solutions and both satisfy the initial condition (Figure 15.4).
We have found a differential equation with multiple solutions satisfying the same ini-tial condition. This differential equation has even more solutions. For instance, two addi-tional solutions are
y = •0, for x … 0
ax5 b
5
, for x 7 0
y(0) = 0y = (x>5)5y = 0
y = ax5 b
5
y(x) = 0
y(0) = 0dydx
= y4>5,
15-4 Chapter 15: First-Order Differential Equations
y
x
(–5, –1)
(5, 1)
(7, 5.4)
–1
–5
1
5
–5 5
FIGURE 15.4 The graph of the solutionto the initial value problem in
Example 3. Another solution is y = 0.y = (x>5)5
(a) y' � y � x2 (b) y' � –1 � x2
2xy(c) y' � (1 � x)y � x
2
FIGURE 15.3 Slope fields (top row) and selected solution curves (bottom row). In computerrenditions, slope segments are sometimes portrayed with arrows, as they are here. This is not tobe taken as an indication that slopes have directions, however, for they do not.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiand
.
In many applications it is desirable to know that there is exactly one solution to an ini-tial value problem. Such a solution is said to be unique. Picard’s Theorem gives conditionsunder which there is precisely one solution. It guarantees both the existence and unique-ness of a solution.
y = • ax5 b
5
, for x … 0
0, for x 7 0
15.1 Solutions, Slope Fields, and Picard’s Theorem 15-5
THEOREM 1—Picard’s Theorem Suppose that both and its partialderivative are continuous on the interior of a rectangle R, and that isan interior point of R. Then the initial value problem
, (2)
has a unique solution y � y(x) for x in some open interval containing x0.
y(x0) = y0dydx
= ƒ(x, y)
(x0, y0)0ƒ>0yƒ(x, y)
The differential equation in Example 3 fails to satisfy the conditions of Picard’s Theorem.Although the function from Example 3 is continuous in the entire xy-plane,the partial derivative fails to be continuous at the point (0, 0) speci-fied by the initial condition. Thus we found the possibility of more than one solution to thegiven initial value problem. Moreover, the partial derivative is not even definedwhere . However, the initial value problem of Example 3 does have unique solutionswhenever the initial condition has .
Picard’s Iteration Scheme
Picard’s Theorem is proved by applying Picard’s iteration scheme, which we now intro-duce. We begin by noticing that any solution to the initial value problem of Equations (2)must also satisfy the integral equation
(3)
because
The converse is also true: If satisfies Equation (3), then and So Equations (2) may be replaced by Equation (3). This sets the stage for Picard’s interation
y(x0) = y0.y¿ = ƒ(x, y(x))y(x)
Lx
x0
dydt
dt = y(x) - y(x0).
y(x) = y0 + Lx
x0
ƒ(t, y(t)) dt
y0 Z 0y(x0) = y0
y = 00ƒ>0y
0ƒ>0y = (4>5) y -1>5ƒ(x, y) = y4>5
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufimethod: In the integrand in Equation (3), replace by the constant , then integrate andcall the resulting right-hand side of Equation (3)
(4)
This starts the process. To keep it going, we use the iterative formulas
(5)
The proof of Picard’s Theorem consists of showing that this process produces a sequence offunctions that converge to a function that satisfies Equations (2) and (3) forvalues of x sufficiently near (The proof also shows that the solution is unique; that is,no other method will lead to a different solution.)
The following examples illustrate the Picard iteration scheme, but in most practicalcases the computations soon become too burdensome to continue.
EXAMPLE 4 Illustrate the Picard iteration scheme for the initial value problem
Solution For the problem at hand, , and Equation (4) becomes
If we now use Equation (5) with we get
Substitute for in
The next iteration, with gives
Substitute for in
In this example it is possible to find the exact solution because
dydx
+ y = x
= 1 - x + x2 - x3
3+ x4
4!.
ƒ(t, y).yy2 y3(x) = 1 + Lx
0 at - 1 + t - t2 + t3
6b dt
n = 2,
= 1 - x + x2 - x3
6.
ƒ(t, y).yy1 y2(x) = 1 + Lx
0 at - 1 - t2
2+ tb dt
n = 1,
= 1 + x2
2- x.
y0 = 1 y1(x) = 1 + Lx
0 (t - 1) dt
ƒ(x, y) = x - y
y(0) = 1.y¿ = x - y,
x0.y(x){yn(x)}
yn + 1(x) = y0 + Lx
x0
ƒ(t, yn(t)) dt.
y1(x) = y0 + Lx
x0
ƒ(t, y0) dt.
y1(x):y0y(t)
15-6 Chapter 15: First-Order Differential Equations
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiis a first-order differential equation that is linear in y. You will learn how to find the gen-eral solution
in the next section. The solution of the initial value problem is then
If we substitute the Maclaurin series for in this particular solution, we get
and we see that the Picard scheme producing has given us the first four terms of thisexpansion.
In the next example we cannot find a solution in terms of elementary functions. ThePicard scheme is one way we could get an idea of how the solution behaves near the initialpoint.
EXAMPLE 5 Find for and 3 for the initial value problem
Solution By definition, The other functions are generated by theintegral representation
We successively calculate
In Section 15.4 we introduce numerical methods for solving initial value problemslike those in Examples 4 and 5.
y3(x) = x3
3+ x7
63+ 2x11
2079+ x15
59535 .
y2(x) = x3
3+ x7
63 ,
y1(x) = x3
3 ,
= x3
3+ L
x
0 (yn(t))
2 dt.
yn + 1(x) = 0 + Lx
0 C t2 + (yn(t))
2 D dt
yn(x)y0(x) = y(0) = 0.
y(0) = 0.y¿ = x2 + y2,
n = 0, 1, 2,yn(x)
y3(x)
= 1 - x + x2 - x3
3+ 2 ax4
4!- x5
5!+ Á b ,
y = x - 1 + 2 a1 - x + x2
2!- x3
3!+ x4
4!- Á b
e-x
y = x - 1 + 2e-x.
y = x - 1 + Ce-x
15.1 Solutions, Slope Fields, and Picard’s Theorem 15-7
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
15-8 Chapter 15: First-Order Differential Equations
EXERCISES 15.1
In Exercises 1–4, match the differential equations with their slopefields, graphed here.
2
–2
–2 2 4–4
–4
4
(d)
x
y
2
–2
–2 2 4–4
–4
4
(c)
x
y
2
–2
–4
4
–2 2 4–4
(b)
x
y
–2
2
4
–4
2–2–4 4
(a)
x
y
1. 2.
3. 4.
In Exercises 5 and 6, copy the slope fields and sketch in some of thesolution curves.
5.
6.
In Exercises 7–10, write an equivalent first-order differential equationand initial condition for y.
7.
8.
9.
10.
Use Picard’s iteration scheme to find for in Exer-cises 11–16.
11.
12. y(0) = 1y¿ = y,
y(1) = 2y¿ = x,
n = 0, 1, 2, 3yn(x)
y = 1 + Lx
0 y (t) dt
y = 2 - Lx
0 (1 + y (t)) sin t dt
y = Lx
1 1t dt
y = -1 + Lx
1 (t - y (t)) dt
2
–2
–2 2 4–4
–4
4
x
y
y¿ = y(y + 1)(y - 1)
2
–2
–2 2 4–4
–4
4
x
y
y¿ = (y + 2)(y - 2)
y¿ = y2 - x2y¿ = - xy
y¿ = y + 1y¿ = x + y
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi13.
14.
15.
16.
17. Show that the solution of the initial value problem
is
18. What integral equation is equivalent to the initial value problem
COMPUTER EXPLORATIONS
In Exercises 19–24, obtain a slope field and add to it graphs of the so-lution curves passing through the given points.
19. with
a. (0, 1) b. (0, 2) c.
20. with
a. (0, 1) b. (0, 4) c. (0, 5)
21. with
a. (0, 1) b. (0, �2) c. (0, ) d.
22. with
a. (0, 1) b. (0, 2) c. d. (0, 0)
23. with
a. b. (0, 1) c. (0, 3) d. (1, �1)
24. with
a. (0, 2) b. c. A -223, -4 Bs0, -6d
y¿ =xy
x2 + 4
s0, -1d
y¿ = s y - 1dsx + 2d
s0, -1d
y¿ = y2
s -1, -1d1>4y¿ = ysx + yd
y¿ = 2s y - 4d
s0, -1d
y¿ = y
y¿ = ƒ(x), y(x0) = y0?
y = -1 - x + (1 + x0 + y0) ex - x0.
y(x0) = y0y¿ = x + y,
y(-1) = 1y¿ = 2x - y,
y(0) = 1y¿ = x + y,
y(0) = 0y¿ = x + y,
y(1) = 1y¿ = xy, In Exercises 25 and 26, obtain a slope field and graph the particularsolution over the specified interval. Use your CAS DE solver to findthe general solution of the differential equation.
25. A logistic equation
26.
Exercises 27 and 28 have no explicit solution in terms of elementaryfunctions. Use a CAS to explore graphically each of the differentialequations.
27.
28. A Gompertz equation
29. Use a CAS to find the solutions of subject to theinitial condition if ƒ(x) is
a. 2x b. sin 2x c. d.
Graph all four solutions over the interval to com-pare the results.
30. a. Use a CAS to plot the slope field of the differential equation
over the region and
b. Separate the variables and use a CAS integrator to find thegeneral solution in implicit form.
c. Using a CAS implicit function grapher, plot solution curvesfor the arbitrary constant values
d. Find and graph the solution that satisfies the initial conditionys0d = -1.
C = -6, -4, -2, 0, 2, 4, 6 .
-3 … y … 3.-3 … x … 3
y¿ = 3x2 + 4x + 22s y - 1d
-2 … x … 6
2e-x>2 cos 2x .3ex>2ys0d = 0,
y¿ + y = ƒsxd
0 … x … 4, 0 … y … 3y¿ = ys1>2 - ln yd, ys0d = 1>3;
y¿ = cos s2x - yd, ys0d = 2; 0 … x … 5, 0 … y … 5
y¿ = ssin xdssin yd, ys0d = 2; -6 … x … 6, -6 … y … 6
0 … y … 30 … x … 4, ys0d = 1>2;y¿ = ys2 - yd,
15.2 First-Order Linear Equations 15-9
First-Order Linear Equations
A first-order linear differential equation is one that can be written in the form
(1)
where P and Q are continuous functions of x. Equation (1) is the linear equation’sstandard form. Since the exponential growth decay equation (Section 6.5)can be put in the standard form
we see it is a linear equation with and Equation (1) is linear (in y)because y and its derivative dy dx occur only to the first power, are not multiplied together,
nor do they appear as the argument of a function such as or 2dy>dx B .sin y, ey ,A> Qsxd = 0.Psxd = -k
dydx
- ky = 0,
dy>dx = ky>
dydx
+ Psxdy = Qsxd ,
15.2
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 1 Put the following equation in standard form:
Solution
Divide by x
Notice that P(x) is not The standard form is so the mi-nus sign is part of the formula for P(x).
Solving Linear Equations
We solve the equation
(2)
by multiplying both sides by a positive function y(x) that transforms the left-hand side intothe derivative of the product We will show how to find y in a moment, but first wewant to show how, once found, it provides the solution we seek.
Here is why multiplying by y(x) works:
(3)
Equation (3) expresses the solution of Equation (2) in terms of the function y(x) and Q(x).We call y(x) an integrating factor for Equation (2) because its presence makes the equa-tion integrable.
Why doesn’t the formula for P(x) appear in the solution as well? It does, but indi-rectly, in the construction of the positive function y(x). We have
Condition imposed on y
Product Rule for derivatives
The terms cancel.y dy
dx y
dydx
= Pyy
y dydx
+ y dydx
= y dydx
+ Pyy
ddx
syyd = y dydx
+ Pyy
y = 1ysxd
L ysxdQsxd dx
ysxd # y = L ysxdQsxd dx
ddx
sysxd # yd = ysxdQsxd
ysxd dydx
+ Psxdysxdy = ysxdQsxd
dydx
+ Psxdy = Qsxd
ysxd # y .
dydx
+ Psxdy = Qsxd
y¿ + Psxdy = Qsxd ,+3>x .-3>x ,
dydx
- 3x y = x
dydx
= x + 3x y
x dydx
= x2 + 3y
x dydx
= x2 + 3y, x 7 0.
15-10 Chapter 15: First-Order Differential Equations
and Qsxd = xStandard form with Psxd = -3>x
Original equation isin standard form.
Multiply by positive y(x).
Integrate with respectto x.
y dy
dx+ Pyy = d
dx sy # yd .
ysxd is chosen to make
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThis last equation will hold if
(4)
Thus a formula for the general solution to Equation (1) is given by Equation (3), wherey(x) is given by Equation (4). However, rather than memorizing the formula, just remem-ber how to find the integrating factor once you have the standard form so P(x) is correctlyidentified.
y = e1 P dx
e ln y = e1 P dx
ln y = L P dx
L dyy = L P dx
dyy = P dx
dydx
= Py
15.2 First-Order Linear Equations 15-11
Variables separated, y 7 0
Integrate both sides.
Since we do not need absolutevalue signs in ln y.
y 7 0 ,
Exponentiate both sides to solve for y.
To solve the linear equation multiply both sides by theintegrating factor and integrate both sides.ysxd = e1 Psxd dx
y¿ + Psxdy = Qsxd ,
When you integrate the left-hand side product in this procedure, you always obtain theproduct y(x)y of the integrating factor and solution function y because of the way y isdefined.
EXAMPLE 2 Solve the equation
Solution First we put the equation in standard form (Example 1):
so is identified.The integrating factor is
= e ln x-3
= 1x3 .
= e-3 ln x
= e-3 ln ƒ x ƒ
ysxd = e1 Psxd dx = e1s-3>xd dx
Psxd = -3>xdydx
- 3x y = x ,
x dydx
= x2 + 3y, x 7 0.
HISTORICAL BIOGRAPHY
Adrien Marie Legendre(1752–1833)
x 7 0
Constant of integration is 0,so y is as simple as possible.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiNext we multiply both sides of the standard form by y(x) and integrate:
Solving this last equation for y gives the general solution:
EXAMPLE 3 Find the particular solution of
satisfying
Solution With we write the equation in standard form:
Then the integrating factor is given by
Thus
Left-hand side is yy.
Integration by parts of the right-hand side gives
Therefore
or, solving for y,
When and this last equation becomes
-2 = -s0 + 4d + C ,
y = -2x = 1
y = -sln x + 4d + Cx1>3 .
x-1>3y = -x-1>3sln x + 1d - 3x-1>3 + C
x-1>3y = -x-1>3sln x + 1d + L x-4>3 dx + C .
x-1>3y = 13Lsln x + 1dx-4>3 dx .
x 7 0y = e1- dx>3x = e s-1>3dln x = x-1>3 .
y¿ - 13x
y = ln x + 13x
.
x 7 0,
ys1d = -2.
3xy¿ - y = ln x + 1, x 7 0,
y = x3 a- 1x + Cb = -x2 + Cx3, x 7 0.
1x3 y = - 1
x + C .
1x3 y = L
1x2 dx
ddx
a 1x3 yb = 1
x2
1x3
dydx
- 3x4 y = 1
x2
1x3
# adydx
- 3x yb = 1
x3# x
15-12 Chapter 15: First-Order Differential Equations
Left-hand side is ddx
sy # yd.
Integrate both sides.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiso
Substitution into the equation for y gives the particular solution
In solving the linear equation in Example 2, we integrated both sides of the equationafter multiplying each side by the integrating factor. However, we can shorten the amountof work, as in Example 3, by remembering that the left-hand side always integrates intothe product of the integrating factor times the solution function. From Equation (3)this means that
We need only integrate the product of the integrating factor y(x) with the right-hand sideQ(x) of Equation (1) and then equate the result with y(x)y to obtain the general solution.Nevertheless, to emphasize the role of y(x) in the solution process, we sometimes followthe complete procedure as illustrated in Example 2.
Observe that if the function Q(x) is identically zero in the standard form given byEquation (1), the linear equation is separable:
Separating the variables
We now present two applied problems modeled by a first-order linear differentialequation.
RL Circuits
The diagram in Figure 15.5 represents an electrical circuit whose total resistance is a con-stant R ohms and whose self-inductance, shown as a coil, is L henries, also a constant.There is a switch whose terminals at a and b can be closed to connect a constant electricalsource of V volts.
Ohm’s Law, has to be modified for such a circuit. The modified form is
(5)
where i is the intensity of the current in amperes and t is the time in seconds. By solvingthis equation, we can predict how the current will flow after the switch is closed.
EXAMPLE 4 The switch in the RL circuit in Figure 15.5 is closed at time Howwill the current flow as a function of time?
Solution Equation (5) is a first-order linear differential equation for i as a function of t.Its standard form is
(6)didt
+ RL
i = VL
,
t = 0.
L didt
+ Ri = V ,
V = RI ,
dy = -Psxd dx
Qsxd K 0 dydx
+ Psxdy = 0
dydx
+ Psxdy = Qsxd
ysxdy = L ysxdQsxd dx .
ysxd # y
y = 2x1>3 - ln x - 4.
C = 2.
15.2 First-Order Linear Equations 15-13
Switch
R L
a b
i
V� �
FIGURE 15.5 The RL circuit inExample 4.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiand the corresponding solution, given that when is
(7)
(Exercise 32). Since R and L are positive, is negative and as Thus,
At any given time, the current is theoretically less than V R, but as time passes, the currentapproaches the steady-state value V R. According to the equation
is the current that will flow in the circuit if either (no inductance) or(steady current, ) (Figure 15.6).
Equation (7) expresses the solution of Equation (6) as the sum of two terms: asteady-state solution V R and a transient solution that tends to zero as
Mixture Problems
A chemical in a liquid solution (or dispersed in a gas) runs into a container holding the liq-uid (or the gas) with, possibly, a specified amount of the chemical dissolved as well. Themixture is kept uniform by stirring and flows out of the container at a known rate. In thisprocess, it is often important to know the concentration of the chemical in the container atany given time. The differential equation describing the process is based on the formula
(8)
If y(t) is the amount of chemical in the container at time t and V(t) is the total volume ofliquid in the container at time t, then the departure rate of the chemical at time t is
(9)
Accordingly, Equation (8) becomes
(10)
If, say, y is measured in pounds, V in gallons, and t in minutes, the units in Equation (10) are
poundsminutes
=poundsminutes
-poundsgallons
# gallonsminutes
.
dydt
= schemical’s arrival rated -ystdVstd
# soutflow rated .
= a concentration incontainer at time tb # soutflow rated .
Departure rate =ystdVstd
# soutflow rated
Rate of changeof amount
in container= £rate at which
chemicalarrives
≥ - £rate at whichchemicaldeparts.
≥
t : q.-sV>Rde-sR>Ldt>
i = constantdi>dt = 0L = 0I = V>R
L didt
+ Ri = V ,
> >lim
t: q i = lim
t: q aV
R- V
R e-sR>Ldtb = V
R- V
R# 0 = V
R.
t : q.e-sR>Ldt : 0-sR>Ld
i = VR
- VR
e-sR>Ldt
t = 0,i = 0
15-14 Chapter 15: First-Order Differential Equations
i
t0 432
i � (1 � e�Rt/L)VR
I � VR I
e
LR
LR
LR
LR
FIGURE 15.6 The growth of the currentin the RL circuit in Example 4. I is thecurrent’s steady-state value. The number
is the time constant of the circuit.The current gets to within 5% of itssteady-state value in 3 time constants(Exercise 31).
t = L>R
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 5 In an oil refinery, a storage tank contains 2000 gal of gasoline that ini-tially has 100 lb of an additive dissolved in it. In preparation for winter weather, gasolinecontaining 2 lb of additive per gallon is pumped into the tank at a rate of 40 gal min. Thewell-mixed solution is pumped out at a rate of 45 gal min. How much of the additive is inthe tank 20 min after the pumping process begins (Figure 15.7)?
> >
15.2 First-Order Linear Equations 15-15
40 gal/min containing 2 lb/gal
45 gal/min containing y lb/gal V
FIGURE 15.7 The storage tank in Example 5 mixes inputliquid with stored liquid to produce an output liquid.
Solution Let y be the amount (in pounds) of additive in the tank at time t. We know thatwhen The number of gallons of gasoline and additive in solution in the
tank at any time t is
Therefore,
Also,
Eq. (10)
The differential equation modeling the mixture process is
in pounds per minute.
dydt
= 80 -45y
2000 - 5t
= 80 lb
min.
Rate in = a2 lbgalb a40
galminb
=45y
2000 - 5t
lbmin
.
= a y2000 - 5t
b 45
Rate out =ystdVstd
# outflow rate
= s2000 - 5td gal .
Vstd = 2000 gal + a40 galmin
- 45 galminb st mind
t = 0.y = 100
Outflow rate is 45 gal minand y = 2000 - 5t .
>
Eq. (9)
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTo solve this differential equation, we first write it in standard form:
Thus, and The integrating factor is
Multiplying both sides of the standard equation by y(t) and integrating both sides gives
The general solution is
Because when we can determine the value of C:
The particular solution of the initial value problem is
The amount of additive 20 min after the pumping begins is
ys20d = 2[2000 - 5s20d] - 3900s2000d9 [2000 - 5s20d]9 L 1342 lb .
y = 2s2000 - 5td - 3900s2000d9 s2000 - 5td9 .
C = - 3900s2000d9 .
100 = 2s2000 - 0d + Cs2000 - 0d9
t = 0,y = 100
y = 2s2000 - 5td + Cs2000 - 5td9 .
s2000 - 5td-9y = 80 # s2000 - 5td-8
s -8ds -5d+ C .
s2000 - 5td-9y = L80s2000 - 5td-9 dt
ddt
C s2000 - 5td-9y D = 80s2000 - 5td-9
s2000 - 5td-9 dydt
+ 45s2000 - 5td-10 y = 80s2000 - 5td-9
s2000 - 5td-9 # adydt
+ 452000 - 5t
yb = 80s2000 - 5td-9
= s2000 - 5td-9 .
2000 - 5t 7 0 = e-9 ln s2000 - 5td
ystd = e1 P dt = e1 452000 - 5t dt
Qstd = 80.Pstd = 45>s2000 - 5td
dydt
+ 452000 - 5t
y = 80.
15-16 Chapter 15: First-Order Differential Equations
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
15.2 First-Order Linear Equations 15-17
EXERCISES 15.2
Solve the differential equations in Exercises 1–14.
1. 2.
3.
4.
5.
6. 7.
8. 9.
10.
11.
12.
13.
14.
Solve the initial value problems in Exercises 15–20.
15.
16.
17.
18.
19.
20.
21. Solve the exponential growth decay initial value problem for y asa function of t thinking of the differential equation as a first-orderlinear equation with and
22. Solve the following initial value problem for u as a function of t:
dudt
+ km u = 0 sk and m positive constantsd, us0d = u0
dy
dt= ky sk constantd, ys0d = y0
Qsxd = 0:Psxd = -k
>dy
dx+ xy = x, ys0d = -6
sx + 1d dy
dx- 2sx2 + xdy = ex 2
x + 1, x 7 -1, ys0d = 5
u dy
du- 2y = u3 sec u tan u, u 7 0, ysp>3d = 2
u dy
du+ y = sin u, u 7 0, ysp>2d = 1
t dy
dt+ 2y = t3, t 7 0, ys2d = 1
dy
dt+ 2y = 3, ys0d = 1
tan u drdu
+ r = sin2 u, 0 6 u 6 p>2sin u
drdu
+ scos udr = tan u, 0 6 u 6 p>2st + 1d
dsdt
+ 2s = 3st + 1d + 1st + 1d2, t 7 -1
st - 1d3 dsdt
+ 4st - 1d2s = t + 1, t 7 1
x dy
dx= cos x
x - 2y, x 7 0
xy¿ - y = 2x ln xe2x y¿ + 2e2x y = 2x
2y¿ = ex>2 + ys1 + xdy¿ + y = 2x
x dy
dx+ 2y = 1 - 1
x , x 7 0
y¿ + stan xdy = cos2 x, -p>2 6 x 6 p>2xy¿ + 3y = sin x
x2 , x 7 0
ex dy
dx+ 2ex y = 1x
dy
dx+ y = ex, x 7 0
a. as a first-order linear equation.
b. as a separable equation.
23. Is either of the following equations correct? Give reasons for youranswers.
a. b.
24. Is either of the following equations correct? Give reasons for youranswers.
a.
b.
25. Salt mixture A tank initially contains 100 gal of brine in which50 lb of salt are dissolved. A brine containing 2 lb gal of salt runsinto the tank at the rate of 5 gal min. The mixture is kept uniformby stirring and flows out of the tank at the rate of 4 gal min.
a. At what rate (pounds per minute) does salt enter the tank attime t ?
b. What is the volume of brine in the tank at time t ?
c. At what rate (pounds per minute) does salt leave the tank attime t ?
d. Write down and solve the initial value problem describing themixing process.
e. Find the concentration of salt in the tank 25 min after theprocess starts.
26. Mixture problem A 200-gal tank is half full of distilled water.At time a solution containing 0.5 lb gal of concentrate en-ters the tank at the rate of 5 gal min, and the well-stirred mixtureis withdrawn at the rate of 3 gal min.
a. At what time will the tank be full?
b. At the time the tank is full, how many pounds of concentratewill it contain?
27. Fertilizer mixture A tank contains 100 gal of fresh water. A so-lution containing 1 lb gal of soluble lawn fertilizer runs into thetank at the rate of 1 gal min, and the mixture is pumped out of thetank at the rate of 3 gal min. Find the maximum amount of fertil-izer in the tank and the time required to reach the maximum.
28. Carbon monoxide pollution An executive conference room ofa corporation contains of air initially free of carbonmonoxide. Starting at time cigarette smoke containing4% carbon monoxide is blown into the room at the rate of
A ceiling fan keeps the air in the room well circulatedand the air leaves the room at the same rate of Findthe time when the concentration of carbon monoxide in the roomreaches 0.01%.
0.3 ft3>min.0.3 ft3>min.
t = 0,4500 ft3
>>>
>>>t = 0,
>> >
1cos xL cos x dx = tan x + C
cos x
1cos xL cos x dx = tan x + C
xL 1x dx = x ln ƒ x ƒ + CxxL
1x dx = x ln ƒ x ƒ + C
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi29. Current in a closed RL circuit How many seconds after theswitch in an RL circuit is closed will it take the current i to reachhalf of its steady-state value? Notice that the time depends on Rand L and not on how much voltage is applied.
30. Current in an open RL circuit If the switch is thrown openafter the current in an RL circuit has built up to its steady-statevalue the decaying current (graphed here) obeys theequation
which is Equation (5) with
a. Solve the equation to express i as a function of t.
b. How long after the switch is thrown will it take the current tofall to half its original value?
c. Show that the value of the current when is . (Thesignificance of this time is explained in the next exercise.)
31. Time constants Engineers call the number the time con-stant of the RL circuit in Figure 15.6. The significance of the timeconstant is that the current will reach 95% of its final value within3 time constants of the time the switch is closed (Figure 15.6).Thus, the time constant gives a built-in measure of how rapidly anindividual circuit will reach equilibrium.
a. Find the value of i in Equation (7) that corresponds toand show that it is about 95% of the steady-state
value
b. Approximately what percentage of the steady-state currentwill be flowing in the circuit 2 time constants after the switchis closed (i.e., when )?
32. Derivation of Equation (7) in Example 4
a. Show that the solution of the equation
didt
+ RL
i = VL
t = 2L>R
I = V>R .t = 3L>R
L>R
i
t0
32
VR
Ie
LR
LR
LR
I>et = L>R
V = 0.
L didt
+ Ri = 0,
I = V>R ,
is
b. Then use the initial condition to determine the valueof C. This will complete the derivation of Equation (7).
c. Show that is a solution of Equation (6) and thatsatisfies the equation
didt
+ RL
i = 0.
i = Ce-sR>Ldti = V>R
is0d = 0
i = VR
+ Ce-sR>Ldt .
15-18 Chapter 15: First-Order Differential Equations
HISTORICAL BIOGRAPHY
James Bernoulli(1654–1705)
A Bernoulli differential equation is of the form
Observe that, if or 1, the Bernoulli equation is linear.For other values of n, the substitution transformsthe Bernoulli equation into the linear equation
For example, in the equation
we have so that and Then
Substitution into the original equation gives
or, equivalently,
This last equation is linear in the (unknown) dependentvariable u.
Solve the differential equations in Exercises 33–36.
33. 34.
35. 36. x2y¿ + 2xy = y3xy¿ + y = y -2
y¿ - y = xy2y¿ - y = -y2
dudx
+ u = -e-x .
-u-2 dudx
- u-1 = e-x u-2
dy>dx = -y2 du>dx = -u-2 du>dx .-y -2 dy>dx .du>dx =u = y1 - 2 = y -1n = 2,
dy
dx- y = e-x y2
dudx
+ s1 - ndPsxdu = s1 - ndQsxd .
u = y1 - nn = 0
dy
dx+ Psxdy = Qsxdyn .
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
15.3 Applications 15-19
Applications
We now look at three applications of first-order differential equations. The first applicationanalyzes an object moving along a straight line while subject to a force opposing its motion.The second is a model of population growth. The last application considers a curve or curvesintersecting each curve in a second family of curves orthogonally (that is, at right angles).
Resistance Proportional to Velocity
In some cases it is reasonable to assume that the resistance encountered by a moving object,such as a car coasting to a stop, is proportional to the object’s velocity. The faster the objectmoves, the more its forward progress is resisted by the air through which it passes. Picturethe object as a mass m moving along a coordinate line with position function s and velocityy at time t. From Newton’s second law of motion, the resisting force opposing the motion is
If the resisting force is proportional to velocity, we have
This is a separable differential equation representing exponential change. The solution tothe equation with initial condition at is (Section 6.5)
(1)
What can we learn from Equation (1)? For one thing, we can see that if m is somethinglarge, like the mass of a 20,000-ton ore boat in Lake Erie, it will take a long time for thevelocity to approach zero (because t must be large in the exponent of the equation in orderto make kt m large enough for y to be small). We can learn even more if we integrateEquation (1) to find the position s as a function of time t.
Suppose that a body is coasting to a stop and the only force acting on it is a resistanceproportional to its speed. How far will it coast? To find out, we start with Equation (1) andsolve the initial value problem
Integrating with respect to t gives
Substituting when gives
The body’s position at time t is therefore
(2)sstd = -y0 m
k e-sk>mdt +
y0 mk
=y0 m
k s1 - e-sk/mdtd .
0 = -y0 m
k+ C and C =
y0 mk
.
t = 0s = 0
s = -y0 m
k e-sk>mdt + C .
dsdt
= y0 e-sk>mdt , ss0d = 0.
>
y = y0 e-sk>mdt .
t = 0y = y0
m dydt
= -ky or dydt
= - km y sk 7 0d .
Force = mass * acceleration = m dydt
.
15.3
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTo find how far the body will coast, we find the limit of s(t) as Since we know that as so that
Thus,
(3)
The number is only an upper bound (albeit a useful one). It is true to life in onerespect, at least: if m is large, it will take a lot of energy to stop the body.
EXAMPLE 1 For a 192-lb ice skater, the k in Equation (1) is about 1 3 slug sec andHow long will it take the skater to coast from 11 ft sec (7.5 mph)
to 1 ft sec? How far will the skater coast before coming to a complete stop?
Solution We answer the first question by solving Equation (1) for t:
We answer the second question with Equation (3):
Modeling Population Growth
In Section 6.5 we modeled population growth with the Law of Exponential Change:
where P is the population at time t, is a constant growth rate, and is the size of thepopulation at time In Section 6.5 we found the solution to this model.
To assess the model, notice that the exponential growth differential equation says that
(4)
is constant. This rate is called the relative growth rate. Now, Table 15.1 gives the worldpopulation at midyear for the years 1980 to 1989. Taking and we seefrom the table that the relative growth rate in Equation (4) is approximately the constant0.017. Thus, based on the tabled data with representing 1980, representing1981, and so forth, the world population could be modeled by the initial value problem,
dPdt
= 0.017P, Ps0d = 4454.
t = 1t = 0
dP L ¢P,dt = 1
dP>dtP
= k
P = P0 ektt = 0.P0k 7 0
dPdt
= kP, Ps0d = P0
= 198 ft .
Distance coasted =y0 m
k= 11 # 6
1>3
t = 18 ln 11 L 43 sec.
- t>18 = ln s1>11d = - ln 11
e-t>18 = 1>11
11e-t>18 = 1
> >6 slugs.m = 192>32 =>>
y0 m>kDistance coasted =
y0 mk
.
=y0 m
k s1 - 0d =
y0 mk
.
limt: q
sstd = limt: q
y0 m
k s1 - e-sk>mdtd
t : q ,e-sk>mdt : 0-sk>md 6 0,t : q .
15-20 Chapter 15: First-Order Differential Equations
In the English system, where weight ismeasured in pounds, mass is measured inslugs. Thus,
assuming the gravitational constant is32 ft/sec2.
Pounds = slugs * 32,
Eq. (1) with
m = 6, y0 = 11, y = 1
k = 1>3,
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
The solution to this initial value problem gives the population function Inyear 1999 (so ), the solution predicts the world population in midyear to be about6152 million, or 6.15 billion (Figure 15.8), which is more than the actual population of6001 million from the U.S. Bureau of the Census. In Section 15.5 we propose a more real-istic model considering environmental factors affecting the growth rate.
Orthogonal Trajectories
An orthogonal trajectory of a family of curves is a curve that intersects each curve of thefamily at right angles, or orthogonally (Figure 15.9). For instance, each straight linethrough the origin is an orthogonal trajectory of the family of circles cen-tered at the origin (Figure 15.10). Such mutually orthogonal systems of curves are of par-ticular importance in physical problems related to electrical potential, where the curves inone family correspond to flow of electric current and those in the other family correspondto curves of constant potential. They also occur in hydrodynamics and heat-flow problems.
EXAMPLE 2 Find the orthogonal trajectories of the family of curves whereis an arbitrary constant.
Solution The curves form a family of hyperbolas with asymptotes Firstwe find the slopes of each curve in this family, or their dy dx values. Differentiating
implicitly gives
Thus the slope of the tangent line at any point (x, y) on one of the hyperbolas isOn an orthogonal trajectory the slope of the tangent line at this same pointy¿ = -y>x .
xy = a
x dydx
+ y = 0 or dydx
= -yx .
xy = a> y = ; x .xy = a
a Z 0xy = a ,
x2 + y2 = a2 ,
t = 19P = 4454e0.017t .
15.3 Applications 15-21
TABLE 15.1 World population (midyear)
PopulationYear (millions)
1980 4454
1981 4530
1982 4610
1983 4690
1984 4770
1985 4851
1986 4933
1987 5018
1988 5105
1989 5190
85>5105 L 0.0167
87>5018 L 0.0173
85>4933 L 0.0172
82>4851 L 0.0169
81>4770 L 0.0170
80>4690 L 0.0171
80>4610 L 0.0174
80>4530 L 0.0177
76>4454 L 0.0171
≤P>P
Source: U.S. Bureau of the Census (Sept., 1999): www.census.govipc www worldpop.html.>> >
t
P
0 10 20
6000
5000
4000
World population (1980–99)
P � 4454e0.017t
FIGURE 15.8 Notice that the value of thesolution is 6152.16 when
which is slightly higher than theactual population in 1999.t = 19,
P = 4454e0.017t
Orthogonal trajectory
FIGURE 15.9 An orthogonal trajectoryintersects the family of curves at rightangles, or orthogonally.
x
y
FIGURE 15.10 Every straight linethrough the origin is orthogonal to thefamily of circles centered at the origin.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufimust be the negative reciprocal, or x y. Therefore, the orthogonal trajectories must satisfythe differential equation
This differential equation is separable and we solve it as in Section 6.5:
Separate variables.
Integrate both sides.
(5)
where is an arbitrary constant. The orthogonal trajectories are the family of hyper-bolas given by Equation (5) and sketched in Figure 15.11.
b = 2C
y2 - x2 = b,
12
y2 = 12
x2 + C
L y dy = L x dx
y dy = x dx
dydx
= xy .
>15-22 Chapter 15: First-Order Differential Equations
x
y
x2 � y2 � bb � 0
xy � a,a � 0
0
FIGURE 15.11 Each curve is orthogonalto every curve it meets in the other family(Example 2).
EXERCISES 15.3
1. Coasting bicycle A 66-kg cyclist on a 7-kg bicycle starts coast-ing on level ground at 9 m sec. The k in Equation (1) is about3.9 kg sec.
a. About how far will the cyclist coast before reaching acomplete stop?
b. How long will it take the cyclist’s speed to drop to 1 m sec?
2. Coasting battleship Suppose that an Iowa class battleship hasmass around 51,000 metric tons (51,000,000 kg) and a k value inEquation (1) of about 59,000 kg sec. Assume that the ship losespower when it is moving at a speed of 9 m sec.
a. About how far will the ship coast before it is dead in thewater?
b. About how long will it take the ship’s speed to drop to 1 m sec?
3. The data in Table 15.2 were collected with a motion detector and aCBL™ by Valerie Sharritts, a mathematics teacher at St. FrancisDeSales High School in Columbus, Ohio. The table shows the dis-tance s (meters) coasted on in-line skates in t sec by her daughterAshley when she was 10 years old. Find a model for Ashley’s posi-tion given by the data in Table 15.2 in the form of Equation (2).Her initial velocity was her mass (she weighed 88 lb), and her total coasting distance was 4.91 m.
4. Coasting to a stop Table 15.3 shows the distance s (meters)coasted on in-line skates in terms of time t (seconds) by KellySchmitzer. Find a model for her position in the form of Equation (2).
m = 39.92 kgy0 = 2.75 m>sec ,
>
>>
>
> >TABLE 15.2 Ashley Sharritts skating data
t (sec) s (m) t (sec) s (m) t (sec) s (m)
0 0 2.24 3.05 4.48 4.77
0.16 0.31 2.40 3.22 4.64 4.82
0.32 0.57 2.56 3.38 4.80 4.84
0.48 0.80 2.72 3.52 4.96 4.86
0.64 1.05 2.88 3.67 5.12 4.88
0.80 1.28 3.04 3.82 5.28 4.89
0.96 1.50 3.20 3.96 5.44 4.90
1.12 1.72 3.36 4.08 5.60 4.90
1.28 1.93 3.52 4.18 5.76 4.91
1.44 2.09 3.68 4.31 5.92 4.90
1.60 2.30 3.84 4.41 6.08 4.91
1.76 2.53 4.00 4.52 6.24 4.90
1.92 2.73 4.16 4.63 6.40 4.91
2.08 2.89 4.32 4.69 6.56 4.91
Her initial velocity was her mass (110 lb), and her total coasting distance was 1.32 m.
m = 49.90 kgy0 = 0.80 m>sec ,
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
15.4 Euler’s Method 15-23
In Exercises 5–10, find the orthogonal trajectories of the family ofcurves. Sketch several members of each family.
5. 6.
7. 8.
9. 10.
11. Show that the curves and are orthogonal.
12. Find the family of solutions of the given differential equation andthe family of orthogonal trajectories. Sketch both families.
a. b.
13. Suppose a and b are positive numbers. Sketch the parabolas
in the same diagram. Show that they intersect at and that each “a-parabola” is orthogonal to every “b-parabola.”
Aa - b, ;22ab B ,y2 = 4a2 - 4ax and y2 = 4b2 + 4bx
x dy - 2y dx = 0x dx + y dy = 0
y2 = x32x2 + 3y2 = 5
y = ek xy = ce-x
2x2 + y2 = c2kx2 + y2 = 1
y = cx2y = mx
TABLE 15.3 Kelly Schmitzer skating data
t (sec) s (m) t (sec) s (m) t (sec) s (m)
0 0 1.5 0.89 3.1 1.30
0.1 0.07 1.7 0.97 3.3 1.31
0.3 0.22 1.9 1.05 3.5 1.32
0.5 0.36 2.1 1.11 3.7 1.32
0.7 0.49 2.3 1.17 3.9 1.32
0.9 0.60 2.5 1.22 4.1 1.32
1.1 0.71 2.7 1.25 4.3 1.32
1.3 0.81 2.9 1.28 4.5 1.32
Euler’s Method
If we do not require or cannot immediately find an exact solution for an initial value prob-lem we can often use a computer to generate a table of approxi-mate numerical values of y for values of x in an appropriate interval. Such a table is calleda numerical solution of the problem, and the method by which we generate the table iscalled a numerical method. Numerical methods are generally fast and accurate, and theyare often the methods of choice when exact formulas are unnecessary, unavailable, oroverly complicated. In this section, we study one such method, called Euler’s method,upon which many other numerical methods are based.
Euler’s Method
Given a differential equation and an initial condition we canapproximate the solution by its linearization
The function L(x) gives a good approximation to the solution y(x) in a short interval about(Figure 15.12). The basis of Euler’s method is to patch together a string of linearizations
to approximate the curve over a longer stretch. Here is how the method works.We know the point lies on the solution curve. Suppose that we specify a new
value for the independent variable to be (Recall that in the defini-tion of differentials.) If the increment dx is small, then
is a good approximation to the exact solution value So from the point which lies exactly on the solution curve, we have obtained the point which liesvery close to the point on the solution curve (Figure 15.13).
Using the point and the slope of the solution curve through we take a second step. Setting we use the linearization of the solution curvethrough to calculate
y2 = y1 + ƒsx1, y1d dx .
sx1, y1dx2 = x1 + dx,
sx1, y1d,ƒsx1, y1dsx1, y1dsx1, ysx1dd
sx1, y1d,sx0 , y0d,y = ysx1d.
y1 = Lsx1d = y0 + ƒsx0 , y0d dx
dx = ¢xx1 = x0 + dx .sx0 , y0d
x0
Lsxd = ysx0d + y¿sx0dsx - x0d or Lsxd = y0 + ƒsx0 , y0dsx - x0d .
y = ysxdysx0d = y0 ,dy>dx = ƒsx, yd
y¿ = ƒsx, yd, ysx0d = y0 ,
15.4HISTORICAL BIOGRAPHY
Leonhard Euler(1703–1783)
0
yy � L(x) � y0 � f (x0, y0)(x � x0)
y � y (x)
(x0, y0)y0
x0x
FIGURE 15.12 The linearization L(x) ofat x = x0 .y = ysxd
0
y
y � y(x)
(x1, y(x1))
(x1, L(x1))
x0 x1 � x0 � dxdx x
(x0, y0)
FIGURE 15.13 The first Euler stepapproximates with y1 = Lsx1d .ysx1d
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThis gives the next approximation to values along the solution curve (Figure 15.14). Continuing in this fashion, we take a third step from the point withslope to obtain the third approximation
and so on. We are literally building an approximation to one of the solutions by followingthe direction of the slope field of the differential equation.
The steps in Figure 15.14 are drawn large to illustrate the construction process, so theapproximation looks crude. In practice, dx would be small enough to make the red curvehug the blue one and give a good approximation throughout.
EXAMPLE 1 Find the first three approximations using Euler’s method for theinitial value problem
starting at with
Solution We have and
The step-by-step process used in Example 1 can be continued easily. Using equallyspaced values for the independent variable in the table and generating n of them, set
Then calculate the approximations to the solution,
The number of steps n can be as large as we like, but errors can accumulate if n is toolarge.
yn = yn - 1 + ƒsxn - 1, yn - 1d dx .
o y2 = y1 + ƒsx1, y1d dx
y1 = y0 + ƒsx0 , y0d dx
xn = xn - 1 + dx .
o x2 = x1 + dx
x1 = x0 + dx
= 1.42 + s1 + 1.42ds0.1d = 1.662
= y2 + s1 + y2d dx
Third: y3 = y2 + ƒsx2 , y2d dx
= 1.2 + s1 + 1.2ds0.1d = 1.42
= y1 + s1 + y1d dx
Second: y2 = y1 + ƒsx1, y1d dx
= 1 + s1 + 1ds0.1d = 1.2
= y0 + s1 + y0d dx
First: y1 = y0 + ƒsx0 , y0d dx
x3 = x0 + 3 dx = 0.3.x0 = 0, y0 = 1, x1 = x0 + dx = 0.1, x2 = x0 + 2dx = 0.2,
dx = 0.1.x0 = 0
y¿ = 1 + y, ys0d = 1,
y1, y2 , y3
y3 = y2 + ƒsx2, y2d dx ,
ƒsx2 , y2dsx2 , y2d
y = ysxdsx2 , y2d
15-24 Chapter 15: First-Order Differential Equations
x
y
0
Euler approximation
Error
(x0, y0)
(x1, y1)
(x2, y2)(x3, y3)
x0 x1 x2 x3
dx dx dx
True solution curvey � y(x)
FIGURE 15.14 Three steps in the Eulerapproximation to the solution of the initialvalue problem As we take more steps, the errors involvedusually accumulate, but not in theexaggerated way shown here.
y¿ = ƒsx, yd, y sx0d = y0 .
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEuler’s method is easy to implement on a computer or calculator. A computer programgenerates a table of numerical solutions to an initial value problem, allowing us to input and the number of steps n, and the step size dx. It then calculates the approximate solu-tion values in iterative fashion, as just described.
Solving the separable equation in Example 1, we find that the exact solution to theinitial value problem is We use this information in Example 2.
EXAMPLE 2 Use Euler’s method to solve
on the interval starting at and taking (a) , (b)Compare the approximations with the values of the exact solution
Solution
(a) We used a computer to generate the approximate values in Table 15.4. The “error”column is obtained by subtracting the unrounded Euler values from the unroundedvalues found using the exact solution. All entries are then rounded to four decimalplaces.
y = 2ex - 1.dx = 0.05.dx = 0.1x0 = 00 … x … 1,
y¿ = 1 + y, ys0d = 1,
y = 2ex - 1.
y1, y2 , Á , yn
y0 ,x0
15.4 Euler’s Method 15-25
TABLE 15.4 Euler solution of step size
x y (Euler) y (exact) Error
0 1 1 0
0.1 1.2 1.2103 0.0103
0.2 1.42 1.4428 0.0228
0.3 1.662 1.6997 0.0377
0.4 1.9282 1.9836 0.0554
0.5 2.2210 2.2974 0.0764
0.6 2.5431 2.6442 0.1011
0.7 2.8974 3.0275 0.1301
0.8 3.2872 3.4511 0.1639
0.9 3.7159 3.9192 0.2033
1.0 4.1875 4.4366 0.2491
dx = 0.1y¿ = 1 + y, ys0d = 1 ,
By the time we reach (after 10 steps), the error is about 5.6% of the exactsolution. A plot of the exact solution curve with the scatterplot of Euler solutionpoints from Table 15.4 is shown in Figure 15.15.
(b) One way to try to reduce the error is to decrease the step size. Table 15.5 shows the re-sults and their comparisons with the exact solutions when we decrease the step size to0.05, doubling the number of steps to 20. As in Table 15.4, all computations are per-formed before rounding. This time when we reach the relative error is onlyabout 2.9%.
x = 1,
x = 1
10
1
2
3
4
x
y
y � 2ex � 1
FIGURE 15.15 The graph of superimposed on a scatterplot of the Eulerapproximations shown in Table 15.4(Example 2).
y = 2ex - 1
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiIt might be tempting to reduce the step size even further in Example 2 to obtain
greater accuracy. Each additional calculation, however, not only requires additional com-puter time but more importantly adds to the buildup of round-off errors due to the approx-imate representations of numbers inside the computer.
The analysis of error and the investigation of methods to reduce it when making nu-merical calculations are important but are appropriate for a more advanced course. Thereare numerical methods more accurate than Euler’s method, as you can see in a furtherstudy of differential equations. We study one improvement here.
Improved Euler’s Method
We can improve on Euler’s method by taking an average of two slopes. We first estimate as in the original Euler method, but denote it by We then take the average of and in place of in the next step. Thus, we calculate the next approxi-mation using
yn = yn - 1 + cƒsxn - 1, yn - 1d + ƒsxn , znd2
d dx .
zn = yn - 1 + ƒsxn - 1, yn - 1d dx
yn
ƒsxn - 1, yn - 1dƒsxn , zndƒsxn - 1, yn - 1dzn .
yn
15-26 Chapter 15: First-Order Differential Equations
HISTORICAL BIOGRAPHY
Carl Runge(1856–1927)
TABLE 15.5 Euler solution of step size
x y (Euler) y (exact) Error
0 1 1 0
0.05 1.1 1.1025 0.0025
0.10 1.205 1.2103 0.0053
0.15 1.3153 1.3237 0.0084
0.20 1.4310 1.4428 0.0118
0.25 1.5526 1.5681 0.0155
0.30 1.6802 1.6997 0.0195
0.35 1.8142 1.8381 0.0239
0.40 1.9549 1.9836 0.0287
0.45 2.1027 2.1366 0.0340
0.50 2.2578 2.2974 0.0397
0.55 2.4207 2.4665 0.0458
0.60 2.5917 2.6442 0.0525
0.65 2.7713 2.8311 0.0598
0.70 2.9599 3.0275 0.0676
0.75 3.1579 3.2340 0.0761
0.80 3.3657 3.4511 0.0853
0.85 3.5840 3.6793 0.0953
0.90 3.8132 3.9192 0.1060
0.95 4.0539 4.1714 0.1175
1.00 4.3066 4.4366 0.1300
dx = 0.05y¿ = 1 + y, ys0d = 1,
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 3 Use the improved Euler’s method to solve
on the interval starting at and taking Compare the approxi-mations with the values of the exact solution
Solution We used a computer to generate the approximate values in Table 15.6. The “error”column is obtained by subtracting the unrounded improved Euler values from the unroundedvalues found using the exact solution. All entries are then rounded to four decimal places.
y = 2ex - 1.dx = 0.1.x0 = 00 … x … 1,
y¿ = 1 + y, ys0d = 1,
15.4 Euler’s Method 15-27
TABLE 15.6 Improved Euler solution of step size
y (improvedx Euler) y (exact) Error
0 1 1 0
0.1 1.21 1.2103 0.0003
0.2 1.4421 1.4428 0.0008
0.3 1.6985 1.6997 0.0013
0.4 1.9818 1.9836 0.0018
0.5 2.2949 2.2974 0.0025
0.6 2.6409 2.6442 0.0034
0.7 3.0231 3.0275 0.0044
0.8 3.4456 3.4511 0.0055
0.9 3.9124 3.9192 0.0068
1.0 4.4282 4.4366 0.0084
dx = 0.1 ys0d = 1 ,y¿ = 1 + y,
By the time we reach (after 10 steps), the relative error is about 0.19%.
By comparing Tables 15.4 and 15.6, we see that the improved Euler’s method is con-siderably more accurate than the regular Euler’s method, at least for the initial value prob-lem y¿ = 1 + y, ys0d = 1.
x = 1
EXERCISES 15.4
In Exercises 1–6, use Euler’s method to calculate the first three ap-proximations to the given initial value problem for the specified incre-ment size. Calculate the exact solution and investigate the accuracy ofyour approximations. Round your results to four decimal places.
1.
2.
3. y¿ = 2xy + 2y, ys0d = 3, dx = 0.2
y¿ = xs1 - yd, ys1d = 0, dx = 0.2
y¿ = 1 -yx, ys2d = -1, dx = 0.5
4.
5.
6.
7. Use the Euler method with to estimate y(1) if and What is the exact value of y(1)?
8. Use the Euler method with to estimate y(2) if and What is the exact value of y(2)?ys1d = 2.
y¿ = y>xdx = 0.2
ys0d = 1.y¿ = ydx = 0.2
y¿ = y + ex - 2, ys0d = 2, dx = 0.5
y¿ = 2xex2
, ys0d = 2, dx = 0.1
y¿ = y2s1 + 2xd, ys -1d = 1, dx = 0.5
T
T
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi9. Use the Euler method with to estimate y(5) ifand What is the exact value of y(5)?
10. Use the Euler method with to estimate y(2) ifand What is the exact value of y(2)?
In Exercises 11 and 12, use the improved Euler’s method to calculatethe first three approximations to the given initial value problem. Com-pare the approximations with the values of the exact solution.
11.(See Exercise 3 for the exact solution.)
12.(See Exercise 2 for the exact solution.)
COMPUTER EXPLORATIONS
In Exercises 13–16, use Euler’s method with the specified step size toestimate the value of the solution at the given point Find the valueof the exact solution at
13.
14.
15.
16.
In Exercises 17 and 18, (a) find the exact solution of the initial valueproblem. Then compare the accuracy of the approximation with using Euler’s method starting at with step size (b) 0.2, (c) 0.1, and(d) 0.05.
17.
18.
In Exercises 19 and 20, compare the accuracy of the approximationwith using the improved Euler’s method starting at with stepsize
a. 0.2 b. 0.1 c. 0.05
d. Describe what happens to the error as the step size decreases.
x0ysx*d
y¿ = y - 1, ys0d = 3, x0 = 0, x* = 1
y¿ = 2y2sx - 1d, ys2d = -1>2, x0 = 2, x* = 3
x0
ysx*d
y¿ = 1 + y2, ys0d = 0, dx = 0.1, x* = 1
y¿ = 2x>y, y 7 0, ys0d = 1, dx = 0.1, x* = 1
y¿ = y + ex - 2, ys0d = 2, dx = 0.5, x* = 2
y¿ = 2xex2
, ys0d = 2, dx = 0.1, x* = 1
x* .x*.
y¿ = xs1 - yd, ys1d = 0, dx = 0.2
y¿ = 2ysx + 1d, ys0d = 3, dx = 0.2
ys0d = 1.y¿ = y - e2xdx = 1>3
ys1d = -1.y¿ = y2>2xdx = 0.5 19.
(See Exercise 17 for the exact solution.)
20.(See Exercise 18 for the exact solution.)
Use a CAS to explore graphically each of the differential equations inExercises 21–24. Perform the following steps to help with your explo-rations.
a. Plot a slope field for the differential equation in the givenxy-window.
b. Find the general solution of the differential equation usingyour CAS DE solver.
c. Graph the solutions for the values of the arbitrary constantsuperimposed on your slope field plot.
d. Find and graph the solution that satisfies the specified initialcondition over the interval [0, b].
e. Find the Euler numerical approximation to the solution of theinitial value problem with 4 subintervals of the x-interval andplot the Euler approximation superimposed on the graphproduced in part (d).
f. Repeat part (e) for 8, 16, and 32 subintervals. Plot these threeEuler approximations superimposed on the graph from part (e).
g. Find the error at the specified pointfor each of your four Euler approximations. Discuss
the improvement in the percentage error.
21.
22.
23. A logistic equation
24.b = 3p>2y¿ = ssin xdssin yd, ys0d = 2; -6 … x … 6, -6 … y … 6;
0 … y … 3; b = 30 … x … 4,ys0d = 1>2; y¿ = ys2 - yd,
b = 2y¿ = -x>y, ys0d = 2; -3 … x … 3, -3 … y … 3;
b = 1y¿ = x + y, ys0d = -7>10; -4 … x … 4, -4 … y … 4;
x = bs y sexactd - y sEulerdd
C = -2, -1, 0, 1, 2
y¿ = y - 1, ys0d = 3, x0 = 0, x* = 1
y¿ = 2y2sx - 1d, ys2d = -1>2, x0 = 2, x* = 3
15-28 Chapter 15: First-Order Differential Equations
T
T
Graphical Solutions of Autonomous Equations
In Chapter 4 we learned that the sign of the first derivative tells where the graph of a func-tion is increasing and where it is decreasing. The sign of the second derivative tells theconcavity of the graph. We can build on our knowledge of how derivatives determine theshape of a graph to solve differential equations graphically. The starting ideas for doing soare the notions of phase line and equilibrium value. We arrive at these notions by investi-gating what happens when the derivative of a differentiable function is zero from a point ofview different from that studied in Chapter 4.
15.5
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEquilibrium Values and Phase Lines
When we differentiate implicitly the equation
we obtain
Solving for we find In this case the derivative is a function of y only (the dependent variable) and is zero when
A differential equation for which dy dx is a function of y only is called anautonomous differential equation. Let’s investigate what happens when the derivative inan autonomous equation equals zero. We assume any derivatives are continuous.
> y = 3.y¿y¿ = 5y - 15 = 5s y - 3d.y¿ = dy>dx
15 a 5
5y - 15b
dydx
= 1.
15 ln s5y - 15d = x + 1
15.5 Graphical Solutions of Autonomous Equations 15-29
DEFINITION If is an autonomous differential equation, thenthe values of y for which are called equilibrium values or rest points.dy>dx = 0
dy>dx = gs yd
Thus, equilibrium values are those at which no change occurs in the dependent vari-able, so y is at rest. The emphasis is on the value of y where not the value of x,as we studied in Chapter 4. For example, the equilibrium values for the autonomous differ-ential equation
are and To construct a graphical solution to an autonomous differential equation, we first
make a phase line for the equation, a plot on the y-axis that shows the equation’s equilib-rium values along with the intervals where dy dx and are positive and negative.Then we know where the solutions are increasing and decreasing, and the concavity of thesolution curves. These are the essential features we found in Section 4.4, so we can deter-mine the shapes of the solution curves without having to find formulas for them.
EXAMPLE 1 Draw a phase line for the equation
and use it to sketch solutions to the equation.
Solution
1. Draw a number line for y and mark the equilibrium values and where
–1 2y
dy>dx = 0.y = 2,y = -1
dydx
= s y + 1ds y - 2d
d2y>dx2>
y = 2.y = -1
dydx
= s y + 1ds y - 2d
dy>dx = 0,
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi2. Identify and label the intervals where and This step resembles whatwe did in Section 4.3, only now we are marking the y-axis instead of the x-axis.
We can encapsulate the information about the sign of on the phase line itself.Since on the interval to the left of a solution of the differential equa-tion with a y-value less than will increase from there toward We displaythis information by drawing an arrow on the interval pointing to
Similarly, between and so any solution with a value inthis interval will decrease toward
For we have so a solution with a y-value greater than 2 will in-crease from there without bound.
In short, solution curves below the horizontal line in the xy-plane risetoward Solution curves between the lines and fall away from
toward Solution curves above rise away from and keepgoing up.
3. Calculate and mark the intervals where and To find we differ-entiate with respect to x, using implicit differentiation.
Formula for . . .
From this formula, we see that changes sign at and Weadd the sign information to the phase line.
y = 2.y = -1, y = 1>2,y–
= s2y - 1ds y + 1ds y - 2d .
= s2y - 1dy¿
= 2yy¿ - y¿
y– = ddx
s y¿d = ddx
s y2 - y - 2d
y¿ y¿ = s y + 1ds y - 2d = y2 - y - 2
y¿y–,y– 6 0.y– 7 0y–
y = 2y = 2y = -1.y = 2y = 2y = -1y = -1.
y = -1
y¿ 7 0,y 7 2,y = -1.
y = 2,y = -1y¿ 6 0
–1 2y
-1.y = -1.-1
y = -1,y¿ 7 0y¿
–1 2y
y' � 0 y' � 0 y' � 0
y¿ 6 0.y¿ 7 0
15-30 Chapter 15: First-Order Differential Equations
differentiated implicitlywith respect to x.
–1 2y
y' � 0 y' � 0 y' � 0 y' � 0y'' � 0 y'' � 0 y'' � 0 y'' � 0
12
4. Sketch an assortment of solution curves in the xy-plane. The horizontal linesand partition the plane into horizontal bands in which we
know the signs of and In each band, this information tells us whether the solu-tion curves rise or fall and how they bend as x increases (Figure 15.16).
The “equilibrium lines” and are also solution curves. (The con-stant functions and satisfy the differential equation.) Solution curvesy = 2y = -1
y = 2y = -1
y– .y¿y = 2y = -1, y = 1>2,
y
x
–1
2
0
y' � 0
y' � 0
y' � 0
y' � 0
y'' � 0
y'' � 0
y'' � 0
y'' � 0
12
FIGURE 15.16 Graphical solutions fromExample 1 include the horizontal lines
and through theequilibrium values. From Theorem 1, notwo solution curves will ever cross ortouch each other.
y = 2y = -1
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufithat cross the line have an inflection point there. The concavity changes fromconcave down (above the line) to concave up (below the line).
As predicted in Step 2, solutions in the middle and lower bands approach theequilibrium value as x increases. Solutions in the upper band rise steadilyaway from the value
Stable and Unstable Equilibria
Look at Figure 15.16 once more, in particular at the behavior of the solution curves near theequilibrium values. Once a solution curve has a value near it tends steadily towardthat value; is a stable equilibrium. The behavior near is just the opposite:all solutions except the equilibrium solution itself move away from it as x increases.We call an unstable equilibrium. If the solution is at that value, it stays, but if it isoff by any amount, no matter how small, it moves away. (Sometimes an equilibrium value isunstable because a solution moves away from it only on one side of the point.)
Now that we know what to look for, we can already see this behavior on the initialphase line. The arrows lead away from and, once to the left of toward
We now present several applied examples for which we can sketch a family of solu-tion curves to the differential equation models using the method in Example 1.
In Section 6.5 we solved analytically the differential equation
modeling Newton’s law of cooling. Here H is the temperature (amount of heat) of an ob-ject at time t and is the constant temperature of the surrounding medium. Our first ex-ample uses a phase line analysis to understand the graphical behavior of this temperaturemodel over time.
EXAMPLE 2 What happens to the temperature of the soup when a cup of hot soup isplaced on a table in a room? We know the soup cools down, but what does a typical tem-perature curve look like as a function of time?
Solution Suppose that the surrounding medium has a constant Celsius temperature of15°C. We can then express the difference in temperature as Assuming H is adifferentiable function of time t, by Newton’s law of cooling, there is a constant of propor-tionality such that
(1)
(minus k to give a negative derivative when ).Since at the temperature 15°C is an equilibrium value. If
Equation (1) tells us that and If the object is hotterthan the room, it will get cooler. Similarly, if then and
An object cooler than the room will warm up. Thus, the behavior described byEquation (1) agrees with our intuition of how temperature should behave. These observa-tions are captured in the initial phase line diagram in Figure 15.17. The value is astable equilibrium.
H = 15
dH>dt 7 0.sH - 15d 6 0H 6 15,
dH>dt 6 0.sH - 15d 7 0H 7 15,H = 15,dH>dt = 0
H 7 15
dHdt
= -ksH - 15d
k 7 0
Hstd - 15.
HS
dHdt
= -ksH - HSd, k 7 0
y = -1.y = 2,y = 2
y = 2y = 2
y = 2y = -1y = -1,
y = 2.y = -1
y = 1>215.5 Graphical Solutions of Autonomous Equations 15-31
15H
� 0 � 0dHdt
dHdt
FIGURE 15.17 First step in constructingthe phase line for Newton’s law of coolingin Example 2. The temperature tendstowards the equilibrium (surrounding-medium) value in the long run.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWe determine the concavity of the solution curves by differentiating both sides ofEquation (1) with respect to t:
Since is negative, we see that is positive when and negative whenFigure 15.18 adds this information to the phase line.
The completed phase line shows that if the temperature of the object is above theequilibrium value of 15°C, the graph of H(t) will be decreasing and concave upward. If thetemperature is below 15°C (the temperature of the surrounding medium), the graph of H(t)will be increasing and concave downward. We use this information to sketch typical solu-tion curves (Figure 15.19).
From the upper solution curve in Figure 15.19, we see that as the object cools down,the rate at which it cools slows down because dH dt approaches zero. This observation isimplicit in Newton’s law of cooling and contained in the differential equation, but theflattening of the graph as time advances gives an immediate visual representation of thephenomenon. The ability to discern physical behavior from graphs is a powerful tool inunderstanding real-world systems.
EXAMPLE 3 Galileo and Newton both observed that the rate of change in momentumencountered by a moving object is equal to the net force applied to it. In mathematicalterms,
(2)
where F is the force and m and y the object’s mass and velocity. If m varies with time, as itwill if the object is a rocket burning fuel, the right-hand side of Equation (2) expands to
using the Product Rule. In many situations, however, m is constant, and Equa-tion (2) takes the simpler form
(3)
known as Newton’s second law of motion (see Section 15.3).In free fall, the constant acceleration due to gravity is denoted by g and the one force
acting downward on the falling body is
the propulsion due to gravity. If, however, we think of a real body falling through the air—say, a penny from a great height or a parachutist from an even greater height—we knowthat at some point air resistance is a factor in the speed of the fall. A more realistic modelof free fall would include air resistance, shown as a force in the schematic diagram inFigure 15.20.
Fr
Fp = mg ,
F = m dydt or F = ma ,
dm>dt = 0,
m dydt
+ y dmdt
F = ddt
smyd
>
dH>dt 7 0.dH>dt 6 0d2H>dt2-k
d2Hdt2 = -k
dHdt
.
ddt
adHdtb = d
dt s -ksH - 15dd
15-32 Chapter 15: First-Order Differential Equations
15H
� 0dHdt� 0dH
dt
� 0d2Hdt2 � 0d2H
dt2
FIGURE 15.18 The complete phase linefor Newton’s law of cooling (Example 2).
H
Initialtemperature
t
15
Temperatureof surroundingmedium
Initialtemperature
FIGURE 15.19 Temperature versus time.Regardless of initial temperature, theobject’s temperature H(t) tends toward15°C, the temperature of the surroundingmedium.
my � 0
y positive
Fp � mg
Fr � ky
FIGURE 15.20 An object falling under theinfluence of gravity with a resistive forceassumed to be proportional to the velocity.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiFor low speeds well below the speed of sound, physical experiments have shown thatis approximately proportional to the body’s velocity. The net force on the falling body is
therefore
giving
(4)
We can use a phase line to analyze the velocity functions that solve this differential equation.The equilibrium point, obtained by setting the right-hand side of Equation (4) equal to
zero, is
If the body is initially moving faster than this, dy dt is negative and the body slows down.If the body is moving at a velocity below and the body speeds up.These observations are captured in the initial phase line diagram in Figure 15.21.
We determine the concavity of the solution curves by differentiating both sides ofEquation (4) with respect to t:
We see that when and when Figure 15.22adds this information to the phase line. Notice the similarity to the phase line for Newton’slaw of cooling (Figure 15.18). The solution curves are similar as well (Figure 15.23).
Figure 15.23 shows two typical solution curves. Regardless of the initial velocity, wesee the body’s velocity tending toward the limiting value This value, a stableequilibrium point, is called the body’s terminal velocity. Skydivers can vary their terminalvelocity from 95 mph to 180 mph by changing the amount of body area opposing the fall.
EXAMPLE 4 In Section 15.3 we examined population growth using the model of expo-nential change. That is, if P represents the number of individuals and we neglect depar-tures and arrivals, then
(5)
where is the birthrate minus the death rate per individual per unit time.Because the natural environment has only a limited number of resources to sustain
life, it is reasonable to assume that only a maximum population M can be accommodated.As the population approaches this limiting population or carrying capacity, resourcesbecome less abundant and the growth rate k decreases. A simple relationship exhibitingthis behavior is
k = rsM - Pd ,
k 7 0
dPdt
= kP ,
y = mg>k .
y 7 mg>k .d2y>dt2 7 0y 6 mg>kd2y>dt2 6 0
d2y
dt2 = ddt
ag - km yb = - k
m dydt
.
mg>k, then dy>dt 7 0>
y =mgk
.
dydt
= g - km y .
m dydt
= mg - ky
F = Fp - Fr ,
Fr
15.5 Graphical Solutions of Autonomous Equations 15-33
y
� 0 � 0dydt
dydt
mgk
FIGURE 15.21 Initial phase line forExample 3.
y
� 0dydt� 0dy
dt
� 0d2y
dt2 � 0d2y
dt2
mgk
FIGURE 15.22 The completed phase linefor Example 3.
Initialvelocity
Initialvelocity
y
t
mgk
mgk
y �
FIGURE 15.23 Typical velocity curves inExample 3. The value is theterminal velocity.
y = mg>k
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwhere is a constant. Notice that k decreases as P increases toward M and that k isnegative if P is greater than M. Substituting for k in Equation (5) gives the dif-ferential equation
(6)
The model given by Equation (6) is referred to as logistic growth.We can forecast the behavior of the population over time by analyzing the phase line
for Equation (6). The equilibrium values are and and we can see thatif and if These observations are recorded on
the phase line in Figure 15.24.We determine the concavity of the population curves by differentiating both sides of
Equation (6) with respect to t:
(7)
If then If then and dP dt are positive andIf then and If
then and dP dt are both negative and We add this infor-mation to the phase line (Figure 15.25).
The lines and divide the first quadrant of the tP-plane into hori-zontal bands in which we know the signs of both dP dt and In each band, weknow how the solution curves rise and fall, and how they bend as time passes. Theequilibrium lines and are both population curves. Population curvescrossing the line have an inflection point there, giving them a sigmoid shape(curved in two directions like a letter S). Figure 15.26 displays typical populationcurves.
P = M>2 P = MP = 0
d2P>dt2.>P = MP = M>2d2P>dt2 7 0.>sM - 2PdP 7 M,
d2P>dt2 6 0.sM - 2Pd 6 0, dP>dt 7 0,M>2 6 P 6 M,d2P>dt2 7 0.>sM - 2PdP 6 M>2,d2P>dt2 = 0.P = M>2,
= rsM - 2Pd dPdt
.
= rM dPdt
- 2rP dPdt
d2Pdt2 = d
dt srMP - rP2d
P 7 M.dP>dt 6 00 6 P 6 MdP>dt 7 0P = 0,P = M
dPdt
= rsM - PdP = rMP - rP2 .
rsM - Pdr 7 0
15-34 Chapter 15: First-Order Differential Equations
0 MP
� 0 � 0dPdt
dPdt
FIGURE 15.24 The initial phase line forEquation 6.
0 MP
� 0dPdt� 0dP
dt
� 0d2Pdt2 � 0d2P
dt2� 0d2Pdt2
M2
FIGURE 15.25 The completed phase linefor logistic growth (Equation 6).
Time
LimitingpopulationM
Popu
latio
n
t
P
M2
FIGURE 15.26 Population curves in Example 4.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
15.5 Graphical Solutions of Autonomous Equations 15-35
EXERCISES 15.5
In Exercises 1–8,
a. Identify the equilibrium values. Which are stable and whichare unstable?
b. Construct a phase line. Identify the signs of and
c. Sketch several solution curves.
1. 2.
3. 4.
5. 6.
7. 8.
The autonomous differential equations in Exercises 9–12 represent mod-els for population growth. For each exercise, use a phase line analysis tosketch solution curves for P(t), selecting different starting values P(0) (asin Example 4). Which equilibria are stable, and which are unstable?
9. 10.
11. 12.
13. Catastrophic continuation of Example 4 Suppose that a healthypopulation of some species is growing in a limited environmentand that the current population is fairly close to the carryingcapacity You might imagine a population of fish living in afreshwater lake in a wilderness area. Suddenly a catastrophe suchas the Mount St. Helens volcanic eruption contaminates the lakeand destroys a significant part of the food and oxygen on whichthe fish depend. The result is a new environment with a carryingcapacity considerably less than and, in fact, less than thecurrent population Starting at some time before the catastro-phe, sketch a “before-and-after” curve that shows how the fishpopulation responds to the change in environment.
14. Controlling a population The fish and game department in acertain state is planning to issue hunting permits to control thedeer population (one deer per permit). It is known that if the deerpopulation falls below a certain level m, the deer will become ex-tinct. It is also known that if the deer population rises above thecarrying capacity M, the population will decrease back to Mthrough disease and malnutrition.
a. Discuss the reasonableness of the following model for thegrowth rate of the deer population as a function of time:
where P is the population of the deer and r is a positiveconstant of proportionality. Include a phase line.
dPdt
= rPsM - PdsP - md ,
P0 .M0M1
M0 .P0
dPdt
= 3Ps1 - Pd aP - 12bdP
dt= 2PsP - 3d
dPdt
= Ps1 - 2PddPdt
= 1 - 2P
y¿ = y3 - y2y¿ = s y - 1ds y - 2ds y - 3d
y¿ = y - 2y, y 7 0y¿ = 2y, y 7 0
dy
dx= y2 - 2y
dy
dx= y3 - y
dy
dx= y2 - 4
dy
dx= s y + 2ds y - 3d
y–.y¿
b. Explain how this model differs from the logistic modelIs it better or worse than the logistic
model?
c. Show that if for all t, then
d. What happens if for all t ?
e. Discuss the solutions to the differential equation. What are theequilibrium points of the model? Explain the dependence ofthe steady-state value of P on the initial values of P. Abouthow many permits should be issued?
15. Skydiving If a body of mass m falling from rest under the ac-tion of gravity encounters an air resistance proportional to thesquare of velocity, then the body’s velocity t seconds into the fallsatisfies the equation.
where k is a constant that depends on the body’s aerodynamicproperties and the density of the air. (We assume that the fall istoo short to be affected by changes in the air’s density.)
a. Draw a phase line for the equation.
b. Sketch a typical velocity curve.
c. For a 160-lb skydiver and with time in secondsand distance in feet, a typical value of k is 0.005. What is thediver’s terminal velocity?
16. Resistance proportional to A body of mass m is projectedvertically downward with initial velocity Assume that the re-sisting force is proportional to the square root of the velocity andfind the terminal velocity from a graphical analysis.
17. Sailing A sailboat is running along a straight course with thewind providing a constant forward force of 50 lb. The only otherforce acting on the boat is resistance as the boat moves throughthe water. The resisting force is numerically equal to five timesthe boat’s speed, and the initial velocity is 1 ft sec. What is themaximum velocity in feet per second of the boat under this wind?
18. The spread of information Sociologists recognize a phenomenoncalled social diffusion, which is the spreading of a piece of informa-tion, technological innovation, or cultural fad among a population.The members of the population can be divided into two classes:those who have the information and those who do not. In a fixedpopulation whose size is known, it is reasonable to assume that therate of diffusion is proportional to the number who have the infor-mation times the number yet to receive it. If X denotes the number ofindividuals who have the information in a population of N people,then a mathematical model for social diffusion is given by
where t represents time in days and k is a positive constant.
dXdt
= kX sN - X d ,
>
y0 .2Ysmg = 160d
m dydt
= mg - ky2, k 7 0
P 6 m
lim t:q Pstd = M.P 7 M
dP>dt = rPsM - Pd.
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufia. Discuss the reasonableness of the model.
b. Construct a phase line identifying the signs of and
c. Sketch representative solution curves.
d. Predict the value of X for which the information is spreadingmost rapidly. How many people eventually receive theinformation?
19. Current in an RL-circuit The accompanying diagram repre-sents an electrical circuit whose total resistance is a constant Rohms and whose self-inductance, shown as a coil, is L henries,also a constant. There is a switch whose terminals at a and b canbe closed to connect a constant electrical source of V volts. FromSection 15.2, we have
where i is the intensity of the current in amperes and t is the timein seconds.
Switch
R L
a b
i
V� �
L didt
+ Ri = V ,
X–.X ¿
15-36 Chapter 15: First-Order Differential Equations
Use a phase line analysis to sketch the solution curve as-suming that the switch in the RL-circuit is closed at time What happens to the current as This value is called thesteady-state solution.
20. A pearl in shampoo Suppose that a pearl is sinking in a thickfluid, like shampoo, subject to a frictional force opposing its falland proportional to its velocity. Suppose that there is also a resis-tive buoyant force exerted by the shampoo. According toArchimedes’ principle, the buoyant force equals the weight of thefluid displaced by the pearl. Using m for the mass of the pearl andP for the mass of the shampoo displaced by the pearl as it de-scends, complete the following steps.
a. Draw a schematic diagram showing the forces acting on thepearl as it sinks, as in Figure 15.20.
b. Using y(t) for the pearl’s velocity as a function of time t, writea differential equation modeling the velocity of the pearl as afalling body.
c. Construct a phase line displaying the signs of and
d. Sketch typical solution curves.
e. What is the terminal velocity of the pearl?
y–.y¿
t : q ?t = 0.
Systems of Equations and Phase Planes
In some situations we are led to consider not one, but several first-order differential equa-tions. Such a collection is called a system of differential equations. In this section we pre-sent an approach to understanding systems through a graphical procedure known as aphase-plane analysis. We present this analysis in the context of modeling the populationsof trout and bass living in a common pond.
Phase Planes
A general system of two first-order differential equations may take the form
Such a system of equations is called autonomous because and do not dependon the independent variable time t, but only on the dependent variables x and y. A solution
dy>dtdx>dt
dydt
= G(x, y).
dxdt
= F(x, y),
15.6
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiof such a system consists of a pair of functions and that satisfies both of the dif-ferential equations simultaneously for every over some time interval (finite or infinite).
We cannot look at just one of these equations in isolation to find solutions or since each derivative depends on both x and y. To gain insight into the solutions, we look atboth dependent variables together by plotting the points in the xy-plane startingat some specified point. Therefore the solution functions are considered as parametricequations (with parameter ), and a corresponding solution curve through the specifiedpoint is called a trajectory of the system. The xy-plane itself, in which these trajectoriesreside, is referred to as the phase plane. Thus we consider both solutions together andstudy the behavior of all the solution trajectories in the phase plane. It can be proved thattwo trajectories can never cross or touch each other.
A Competitive-Hunter Model
Imagine two species of fish, say trout and bass, competing for the same limited resourcesin a certain pond. We let represent the number of trout and the number of bass liv-ing in the pond at time t. In reality and are always integer valued, but we will ap-proximate them with real-valued differentiable functions. This allows us to apply themethods of differential equations.
Several factors affect the rates of change of these populations. As time passes, eachspecies breeds, so we assume its population increases proportionally to its size. Taken by it-self, this would lead to exponential growth in each of the two populations. However, there isa countervailing effect from the fact that the two species are in competition. A large numberof bass tends to cause a decrease in the number of trout, and vice-versa. Our model takesthe size of this effect to be proportional to the frequency with which the two species inter-act, which in turn is proportional to , the product of the two populations. These consider-ations lead to the following model for the growth of the trout and bass in the pond:
(1a)
(1b)
Here represents the trout population, the bass population, and a, b, m, n are positiveconstants. A solution of this system then consists of a pair of functions and thatgives the population of each fish species at time t. Each equation in (1) contains both of theunknown functions x and y, so we are unable to solve them individually. Instead, we will usea graphical analysis to study the solution trajectories of this competitive-hunter model.
We now examine the nature of the phase plane in the trout-bass population model. Wewill be interested in the 1st quadrant of the xy-plane, where and since popu-lations cannot be negative. First, we determine where the bass and trout populations areboth constant. Noting that the values remain unchanged when and
, Equations (1a and 1b) then become
This pair of simultaneous equations has two solutions: and At these values, called equilibrium or rest points, the two populations
remain at constant values over all time. The point represents a pond containing nomembers of either fish species; the point corresponds to a pond with an un-changing number of each fish species.
(m>n, a>b)(0, 0)
(x, y)(m>n, a>b).(x, y) =(x, y) = (0, 0)
(m - nx)y = 0.
(a - by)x = 0,
dy>dt = 0dx>dt = 0(x(t), y(t))
y Ú 0,x Ú 0
y(t)x(t)y(t)x(t)
dydt
= (m - nx)y.
dxdt
= (a - by)x,
xy
y(t)x(t)y(t)x(t)
t
(x(t), y(t))
y(t)x(t)t
y(t)x(t)
15.6 Systems of Equations and Phase Planes 15-37
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
In setting up our competitive-hunter model, precise values of the constants a, b, m, nwill not generally be known. Nonetheless, we can analyze the system of Equations (1) tolearn the nature of its solution trajectories. We begin by determining the signs of and
throughout the phase plane. Although represents the number of trout and thenumber of bass at time t, we are thinking of the pair of values as a point tracingout a trajectory curve in the phase plane. When is positive, is increasing and thepoint is moving to the right in the phase plane. If is negative, the point is moving tothe left. Likewise, the point is moving upward where is positive and downward where
is negative.We saw that along the vertical line . To the left of this line,
is positive since and . So the trajectories on this side of theline are directed upward. To the right of this line, is negative and the trajectoriespoint downward. The directions of the associated trajectories are indicated in Figure 15.28.Similarly, above the horizontal line , we have and the trajectories headleftward; below this line they head rightward, as shown in Figure 15.29. Combining thisinformation gives four distinct regions in the plane A, B, C, D, with their respective trajec-tory directions shown in Figure 15.30.
Next, we examine what happens near the two equilibrium points. The trajectories nearpoint away from it, upward and to the right. The behavior near the equilibrium point
depends on the region in which a trajectory begins. If it starts in region B, forinstance, then it will move downward and leftward towards the equilibrium point. Depend-ing on where the trajectory begins, it may move downward into region D, leftward into re-gion A, or perhaps straight into the equilibrium point. If it enters into regions A or D, thenit will continue to move away from the rest point. We say that both rest points areunstable, meaning (in this setting) there are trajectories near each point that head awayfrom them. These features are indicated in Figure 15.31.
It turns out that in each of the half-planes above and below the line , there isexactly one trajectory approaching the equilibrium point (see Exercise 7).Above these two trajectories the bass population increases and below them it decreases.The two trajectories approaching the equilibrium point are suggested in Figure 15.32.
(m>n, a>b)y = a>b
(m>n, a>b)(0, 0)
dx>dt 6 0y = a>bdy>dt
x 6 m>ndy>dt = (m - nx)ydy>dtx = m>ndy>dt = 0
dy>dtdy>dt
dx>dtx(t)dx>dt
(x(t), y(t))y(t)x(t)dy>dt
dx>dt
15-38 Chapter 15: First-Order Differential Equations
FIGURE 15.27 Rest points in the competitive-hunter model given by Equations (1a and 1b).
FIGURE 15.28 To the leftof the line thetrajectories move upward, andto the right they movedownward.
x = m>n
FIGURE 15.29 Above theline the trajectoriesmove to the left, and below itthey move to the right.
y = a>b
FIGURE 15.30 Composite graphicalanalysis of the trajectory directions in thefour regions determined by andy = a>b.
x = m>n
Next, we note that if , then Equation (1a) implies , so the trout pop-ulation is constant. Similarly, if then Equation (1b) implies , andthe bass population is constant. This information is recorded in Figure 15.27.y(t)
dy>dt = 0x = m>n,x(t)dx>dt = 0y = a>b
Trout
Bassy
x
(a)
= 0dxdta
b
Bass
Trout
y
x
(c)
mn
ab
mn
ab( , )
Bass
Trout
y
x
(b)
= 0dydt
mn
Bass
Trout
y
xmn
Bass
Trout
y
x
ab
Bass
Trout(0, 0)
y
xmn
ab
A B
C D
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiAnother Type of Behavior
The system
(2a)
(2b)
can be shown to have only one equilibrium point at . Yet any trajectory starting on theunit circle traverses it clockwise because, when , we have (seeExercise 2). If a trajectory starts inside the unit circle, it spirals outward, asymptoticallyapproaching the circle as . If a trajectory starts outside the unit circle, it spirals in-ward, again asymptotically approaching the circle as . The circle iscalled a limit cycle of the system (Figure 15.35). In this system, the values of x and y even-tually become periodic.
x2 + y2 = 1t : qt : q
dy>dx = -x>yx2 + y2 = 1(0, 0)
dydt
= -x + y - y(x2 + y2)
dxdt
= y + x - x(x2 + y2),
Our graphical analysis leads us to conclude that, under the assumptions of thecompetitive-hunter model, it is unlikely that both species will reach equilibrium levels.This is because it would be almost impossible for the fish populations to move exactlyalong one of the two approaching trajectories for all time. Furthermore, the initial popula-tions point determines which of the two species is likely to survive over time, andmutual coexistence of the species is highly improbable.
Limitations of the Phase-Plane Analysis Method
Unlike the situation for the competitive-hunter model, it is not always possible to deter-mine the behavior of trajectories near a rest point. For example, suppose we know that thetrajectories near a rest point, chosen here to be the origin , behave as in Figure 15.33.The information provided by Figure 15.33 is not sufficient to distinguish between the threepossible trajectories shown in Figure 15.34. Even if we could determine that a trajectorynear an equilibrium point resembles that of Figure 15.34c, we would still not know howthe other trajectories behave. It could happen that a trajectory closer to the origin behaveslike the motions displayed in Figure 15.34a or 15.34b. The spiraling trajectory in Figure15.34b can never actually reach the rest point in a finite time period.
(0, 0)
(x0, y0)
15.6 Systems of Equations and Phase Planes 15-39
FIGURE 15.31 Motion along thetrajectories near the rest points (0, 0)and (m>n, a>b).
FIGURE 15.32 Qualitative results ofanalyzing the competitive-hunter model.There are exactly two trajectoriesapproaching the point (m>n, a>b).
FIGURE 15.33 Trajectory directionnear the rest point (0, 0).
y
x
y
x
y
x
(a) (b) (c)
(x0, y0) (x0, y0) (x0, y0)
FIGURE 15.34 Three possible trajectory motions: (a) periodic motion, (b) motiontoward an asymptotically stable rest point, and (c) motion near an unstable rest point.
FIGURE 15.35 The solutionis a limit cycle.x2 + y2 = 1
Bass
Trout(0, 0)
y
xmn
ab
A B
C D
Bass
Bass win
Trout
Trout win
(0, 0)
y
x
mn
ab( , )
y
x
(x0, y0)
x2 + y2 = 1
(x1, y1)
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
15-40 Chapter 15: First-Order Differential Equations
EXERCISES 15.6
1. List three important considerations that are ignored in thecompetitive-hunter model as presented in the text.
2. For the system (2a and 2b), show that any trajectory starting onthe unit circle will traverse the unit circle in a peri-odic solution. First introduce polar coordinates and rewrite thesystem as and
3. Develop a model for the growth of trout and bass assuming that inisolation trout demonstrate exponential decay [so that inEquations (1a and 1b)] and that the bass population grows logisti-cally with a population limit M. Analyze graphically the motion inthe vicinity of the rest points in your model. Is coexistence possible?
4. How might the competitive-hunter model be validated? Include adiscussion of how the various constants a, b, m, and n might beestimated. How could state conservation authorities use the modelto ensure the survival of both species?
5. Consider another competitive-hunter model defined by
where x and y represent trout and bass populations, respectively.
a. What assumptions are implicitly being made about the growthof trout and bass in the absence of competition?
b. Interpret the constants a, b, m, n, and in terms of thephysical problem.
c. Perform a graphical analysis:
i. Find the possible equilibrium levels.
ii. Determine whether coexistence is possible.
iii. Pick several typical starting points and sketch typicaltrajectories in the phase plane.
iv. Interpret the outcomes predicted by your graphicalanalysis in terms of the constants a, b, m, n, and
Note: When you get to part (iii), you should realize that five casesexist. You will need to analyze all five cases.
6. Consider the following economic model. Let P be the price of asingle item on the market. Let Q be the quantity of the item avail-able on the market. Both P and Q are functions of time. If oneconsiders price and quantity as two interacting species, the fol-lowing model might be proposed:
where a, b, c, and ƒ are positive constants. Justify and discuss theadequacy of the model.
dQ
dt= cQ(ƒP - Q),
dPdt
= aP a bQ
- Pb ,
k2.k1,
k2k1,
dy
dt= m a1 -
y
k2b y - nxy,
dxdt
= a a1 - xk1b x - bxy,
a 6 0
du>dt = 1.dr>dt = r(1 - r2)
x2 + y2 = 1
a. If and find theequilibrium points of this system. If possible, classify eachequilibrium point with respect to its stability. If a point cannotbe readily classified, give some explanation.
b. Perform a graphical stability analysis to determine what willhappen to the levels of P and Q as time increases.
c. Give an economic interpretation of the curves that determinethe equilibrium points.
7. Show that the two trajectories leading to shown inFigure 15.32 are unique by carrying out the following steps.
a. From system (1a and 1b) derive the following equation:
b. Separate variables, integrate, and exponentiate to obtain
where K is a constant of integration.
c. Let and Show that has aunique maximum of when as shown inFigure 15.36. Similarly, show that has a unique maximum
when also shown in Figure 15.36.
d. Consider what happens as ( ) approaches Takelimits in part (b) as and to show that eithery : a>bx : m>n (m>n, a>b).x, y
f (y)
y
My
ab
yae–by
g(x)
x
Mx
mn
xme–nx
x = m>n,Mx = (m>en)mg(x)
y = a>bMy = (a>eb)aƒ(y)g(x) = xm>enx.ƒ(y) = ya>eby
yae-by = Kxme-nx
dy
dx=
(m - nx)y
(a - by)x.
(m>n, a>b)
ƒ = 30,a = 1, b = 20,000, c = 1,
FIGURE 15.36 Graphs of the functionsand g(x) = xm>enx.ƒ(y) = ya>eby
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
or Thus any solution trajectory that approachesmust satisfy
e. Show that only one trajectory can approach frombelow the line Pick From Figure 15.36you can see that which implies that
This in turn implies that
Figure 15.36 tells you that for there is a unique valuesatisfying this last inequality. That is, for each
there is a unique value of x satisfying the equation inpart (d). Thus there can exist only one trajectory solutionapproaching from below, as shown in Figure 15.37.
f. Use a similar argument to show that the solution trajectoryleading to is unique if y0 7 a>b.(m>n, a>b)
(m>n, a>b)
y 6 a>bx0 6 m>n g(x)
xm
enx 6 Mx.
My
Mx axm
enx b = y0 a>eby0 6 My.
ƒ(y0) 6 My,y0 6 a>b.y = a>b.
(m>n, a>b)
ya
eby= aMy
Mxb axm
enx b .
(m>n, a>b)My>Mx = K.
limx:m>n c a ya
ebyb aenx
xm b d = K
15.6 Systems of Equations and Phase Planes 15-41
8. Show that the second-order differential equation can be reduced to a system of two first-order differential equations
Can something similar be done to the nth-order differential equa-
tion y (n) = F Ax, y, y¿, y–, Á , y (n - 1) B?
dzdx
= F(x, y, z).
dy
dx= z,
y– = F(x, y, y¿)
y
x
ab
mn
Unique x0
y0
Bass
Trout
y : a>b
FIGURE 15.37 For anyonly one solution
trajectory leads to the rest point(m>n, a>b).
y 6 a>b
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
OVERVIEW In this chapter we extend our study of differential equations to those of secondorder. Second-order differential equations arise in many applications in the sciences andengineering. For instance, they can be applied to the study of vibrating springs and electriccircuits. You will learn how to solve such differential equations by several methods in thischapter.
16-1
SECOND-ORDER
DIFFERENTIAL EQUATIONS
C h a p t e r
16
Second-Order Linear Equations
An equation of the form
(1)
which is linear in y and its derivatives, is called a second-order linear differential equa-tion. We assume that the functions , and are continuous throughout some openinterval I. If is identically zero on I, the equation is said to be homogeneous; other-wise it is called nonhomogeneous. Therefore, the form of a second-order linear homoge-neous differential equation is
(2)
We also assume that is never zero for any .Two fundamental results are important to solving Equation (2). The first of these says
that if we know two solutions and of the linear homogeneous equation, then anylinear combination is also a solution for any constants and .c2c1y = c1y1 + c2y2
y2y1
x H IP(x)
P(x)y– + Q(x)y¿ + R(x)y = 0.
G(x)GP, Q, R
P(x)y–(x) + Q(x)y¿(x) + R(x)y(x) = G(x),
16.1
THEOREM 1—The Superposition Principle If and are two solutionsto the linear homogeneous equation (2), then for any constants and , thefunction
is also a solution to Equation (2).
y(x) = c1y1(x) + c2y2(x)
c2c1
y2(x)y1(x)
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-1
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiProof Substituting y into Equation (2), we have
144442444443 144442444443is a solution � 0, is a solution
Therefore, is a solution of Equation (2).
Theorem 1 immediately establishes the following facts concerning solutions to thelinear homogeneous equation.
1. A sum of two solutions to Equation (2) is also a solution. (Choose .)
2. A constant multiple of any solution to Equation (2) is also a solution. (Chooseand .)
3. The trivial solution is always a solution to the linear homogeneous equa-tion. (Choose .)
The second fundamental result about solutions to the linear homogeneous equationconcerns its general solution or solution containing all solutions. This result says thatthere are two solutions and such that any solution is some linear combination of themfor suitable values of the constants and . However, not just any pair of solutions willdo. The solutions must be linearly independent, which means that neither nor is aconstant multiple of the other. For example, the functions and arelinearly independent, whereas and are not (so they are linearly de-pendent). These results on linear independence and the following theorem are proved inmore advanced courses.
g(x) = 7x2ƒ(x) = x2g(x) = xexƒ(x) = ex
y2y1
c2c1
y2y1
c1 = c2 = 0y(x) K 0
c2 = 0c1 = ky1ky1
c2 = 1c1 =y1 + y2
y = c1y1 + c2y2
= c1(0) + c2(0) = 0.
y2= 0, y1
(P(x)y2– + Q(x)y2¿ + R(x)y2)c2(P(x)y1– + Q(x)y1¿ + R(x)y1) += c1
= P(x)(c1y1– + c2 y2–) + Q(x)(c1y1¿ + c2 y2¿) + R(x)(c1y1 + c2 y2)
= P(x)(c1y1 + c2 y2)– + Q(x)(c1y1 + c2 y2)¿ + R(x)(c1y1 + c2 y2)
P(x)y– + Q(x)y¿ + R(x)y
16-2 Chapter 16: Second-Order Differential Equations
THEOREM 2 If and are continuous over the open interval I and isnever zero on I, then the linear homogeneous equation (2) has two linearlyindependent solutions and on I. Moreover, if and are any two linearlyindependent solutions of Equation (2), then the general solution is given by
where and are arbitrary constants.c2c1
y(x) = c1y1(x) + c2 y2(x),
y2y1y2y1
P(x)RP, Q,
We now turn our attention to finding two linearly independent solutions to the specialcase of Equation (2), where and are constant functions.
Constant-Coefficient Homogeneous Equations
Suppose we wish to solve the second-order homogeneous differential equation
(3)ay– + by¿ + cy = 0,
RP, Q,
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-2
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwhere a, b, and c are constants. To solve Equation (3), we seek a function which whenmultiplied by a constant and added to a constant times its first derivative plus a constanttimes its second derivative sums identically to zero. One function that behaves this way isthe exponential function , when r is a constant. Two differentiations of this expo-nential function give and , which are just constant multiples of theoriginal exponential. If we substitute into Equation (3), we obtain
Since the exponential function is never zero, we can divide this last equation through by. Thus, is a solution to Equation (3) if and only if r is a solution to the algebraic
equationy = erxerx
ar2erx + brerx + cerx = 0.
y = erxy– = r2erxy¿ = rerx
y = erx
16.1 Second-Order Linear Equations 16-3
(4)ar2 + br + c = 0.
Equation (4) is called the auxiliary equation (or characteristic equation) of the differen-tial equation . The auxiliary equation is a quadratic equation withroots
and
There are three cases to consider which depend on the value of the discriminant
Case 1: In this case the auxiliary equation has two real and unequal rootsand . Then and are two linearly independent solutions to Equation
(3) because is not a constant multiple of (see Exercise 61). From Theorem 2 weconclude the following result.
er1 xer2 xy2 = er2 xy1 = er1 xr2r1
b2 � 4ac>0.
b2 - 4ac.
r2 = -b - 2b2 - 4ac2a
.r1 = -b + 2b2 - 4ac2a
ay– + by¿ + cy = 0
THEOREM 3 If and are two real and unequal roots to the auxiliaryequation , then
is the general solution to .ay– + by¿ + cy = 0
y = c1er1 x + c2e
r2 x
ar2 + br + c = 0r2r1
EXAMPLE 1 Find the general solution of the differential equation
Solution Substitution of into the differential equation yields the auxiliaryequation
which factors as
The roots are and Thus, the general solution is
y = c1e3x + c2e
-2x.
r2 = -2.r1 = 3
(r - 3)(r + 2) = 0.
r2 - r - 6 = 0,
y = erx
y– - y¿ - 6y = 0.
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-3
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiCase 2: In this case To simplify the notation, let. Then we have one solution with . Since multiplication
of by a constant fails to produce a second linearly independent solution, suppose we trymultiplying by a function instead. The simplest such function would be , so let’ssee if is also a solution. Substituting into the differential equation gives
The first term is zero because ; the second term is zero because solves theauxiliary equation. The functions and are linearly independent (seeExercise 62). From Theorem 2 we conclude the following result.
y2 = xerxy1 = erxrr = -b>2a
= 0(erx) + (0)xerx = 0.
= (2ar + b)erx + (ar2 + br + c)xerx
ay2– + by2¿ + cy2 = a(2rerx + r2xerx) + b(erx + rxerx) + cxerx
y2y2 = xerxu(x) = x
erx2ar + b = 0y1 = erxr = -b>2a
r1 = r2 = -b>2a.b2 � 4ac � 0.
16-4 Chapter 16: Second-Order Differential Equations
THEOREM 4 If r is the only (repeated) real root to the auxiliary equation, then
is the general solution to .ay– + by¿ + cy = 0
y = c1erx + c2 xerx
ar2 + br + c = 0
EXAMPLE 2 Find the general solution to
Solution The auxiliary equation is
which factors into
Thus, is a double root. Therefore, the general solution is
Case 3: In this case the auxiliary equation has two complex rootsand , where and are real numbers and . (These real
numbers are and .) These two complex roots then giverise to two linearly independent solutions
and
(The expressions involving the sine and cosine terms follow from Euler’s identity in Sec-tion 8.9.) However, the solutions and are complex valued rather than real valued.Nevertheless, because of the superposition principle (Theorem 1), we can obtain fromthem the two real-valued solutions
and
The functions and are linearly independent (see Exercise 63). From Theorem 2 weconclude the following result.
y4y3
y4 = 12i
y1 - 12i
y2 = eax sin bx.y3 = 12
y1 + 12
y2 = eaxcos bx
y2y1
y2 = e (a- ib)x = eax(cos bx - i sin bx).y1 = e (a+ ib)x = eax(cos bx + i sin bx)
b = 24ac - b2>2aa = -b>2a
i2 = -1bar2 = a - ibr1 = a + ibb2�4ac<0.
y = c1e-2x + c2 xe-2x.
r = -2
(r + 2)2 = 0.
r2 + 4r + 4 = 0,
y– + 4y¿ + 4y = 0.
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-4
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
EXAMPLE 3 Find the general solution to the differential equation
Solution The auxiliary equation is
The roots are the complex pair or and Thus, and give the general solution
Initial Value and Boundary Value Problems
To determine a unique solution to a first-order linear differential equation, it was sufficientto specify the value of the solution at a single point. Since the general solution to a second-order equation contains two arbitrary constants, it is necessary to specify two conditions.One way of doing this is to specify the value of the solution function and the value of itsderivative at a single point: and . These conditions are called initialconditions. The following result is proved in more advanced texts and guarantees the exis-tence of a unique solution for both homogeneous and nonhomogeneous second-orderlinear initial value problems.
y¿(x0) = y1y(x0) = y0
y = e2x(c1 cos x + c2 sin x).
b = 1a = 2r2 = 2 - i.r1 = 2 + ir = (4 ; 216 - 20)>2
r2 - 4r + 5 = 0.
y– - 4y¿ + 5y = 0.
16.1 Second-Order Linear Equations 16-5
THEOREM 5 If and are two complex roots to theauxiliary equation , then
is the general solution to ay– + by¿ + cy = 0.
y = eax(c1 cos bx + c2 sin bx)
ar2 + br + c = 0r2 = a - ibr1 = a + ib
THEOREM 6 If and are continuous throughout an open interval I,then there exists one and only one function satisfying both the differentialequation
on the interval I, and the initial conditions
and
at the specified point .x0 H I
y¿(x0) = y1y(x0) = y0
P(x)y–(x) + Q(x)y¿(x) + R(x)y(x) = G(x)
y(x)GP, Q, R,
It is important to realize that any real values can be assigned to and and Theorem 6applies. Here is an example of an initial value problem for a homogeneous equation.
y1y0
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-5
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 4 Find the particular solution to the initial value problem
Solution The auxiliary equation is
.
The repeated real root is giving the general solution
Then,
From the initial conditions we have
Thus, and The unique solution satisfying the initial conditions is
The solution curve is shown in Figure 16.1.
Another approach to determine the values of the two arbitrary constants in the generalsolution to a second-order differential equation is to specify the values of the solutionfunction at two different points in the interval I. That is, we solve the differential equationsubject to the boundary values
and ,
where and both belong to I. Here again the values for and can be any realnumbers. The differential equation together with specified boundary values is called aboundary value problem. Unlike the result stated in Theorem 6, boundary value prob-lems do not always possess a solution or more than one solution may exist (see Exercise65). These problems are studied in more advanced texts, but here is an example for whichthere is a unique solution.
EXAMPLE 5 Solve the boundary value problem
.
Solution The auxiliary equation is , which has the complex roots .The general solution to the differential equation is
.
The boundary conditions are satisfied if
.
It follows that and . The solution to the boundary value problem is
.y = 2 sin 2x
c2 = 2c1 = 0
y ap12b = c1 cos ap
6b + c2 sin ap
6b = 1
y(0) = c1# 1 + c2
# 0 = 0
y = c1 cos 2x + c2 sin 2x
r = ;2ir2 + 4 = 0
y– + 4y = 0, y(0) = 0, y ap12b = 1
y2y1x2x1
y(x2) = y2y(x1) = y1
y = ex - 2xex.
c2 = -2.c1 = 1
1 = c1 + c2# 0 and -1 = c1 + c2
# 1.
y¿ = c1ex + c2(x + 1)ex.
y = c1ex + c2 xex.
r = 1,
r2 - 2r + 1 = (r - 1)2 = 0
y– - 2y¿ + y = 0, y(0) = 1, y¿(0) = -1.
16-6 Chapter 16: Second-Order Differential Equations
–4 –3 –2 –1 0 1
–6
–8
–4
–2
y
x
y = ex – 2xex
FIGURE 16.1 Particular solution curvefor Example 4.
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-6
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16.1 Second-Order Linear Equations 16-7
EXERCISES 16.1
In Exercises 1–30, find the general solution of the given equation.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11. 12.
13. 14.
15. 16.
17. 18.
19. 20.
21. 22.
23. 24.
25. 26.
27. 28.
29. 30.
In Exercises 31–40, find the unique solution of the second-orderinitial value problem.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40. 9d2y
dx2 - 12dy
dx+ 4y = 0, y(0) = -1,
dy
dx(0) = 1
4d2y
dx2 + 12dy
dx+ 9y = 0, y(0) = 2,
dy
dx(0) = 1
4y– - 4y¿ + y = 0, y(0) = 4, y¿(0) = 4
y– - 4y¿ + 4y = 0, y(0) = 1, y¿(0) = 0
y– + 4y¿ + 4y = 0, y(0) = 0, y¿(0) = 1
y– + 8y = 0, y(0) = -1, y¿(0) = 2
12y– + 5y¿ - 2y = 0, y(0) = 1, y¿(0) = -1
y– + 12y = 0, y(0) = 0, y¿(0) = 1
y– + 16y = 0, y(0) = 2, y¿(0) = -2
y– + 6y¿ + 5y = 0, y(0) = 0, y¿(0) = 3
9d2y
dx2 - 12dy
dx+ 4y = 09
d2y
dx2 + 6dy
dx+ y = 0
4d2y
dx2 - 4dy
dx+ y = 04
d2y
dx2 + 4dy
dx+ y = 0
4d2y
dx2 - 12dy
dx+ 9y = 0
d2y
dx2 + 6dy
dx+ 9y = 0
d2y
dx2 - 6dy
dx+ 9y = 0
d2y
dx2 + 4dy
dx+ 4y = 0
y– + 8y¿ + 16y = 0y– = 0
4y– - 4y¿ + 13y = 0y– + 4y¿ + 9y = 0
y– - 2y¿ + 3y = 0y– + 2y¿ + 4y = 0
y– + 16y = 0y– - 2y¿ + 5y = 0
y– + y = 0y– + 25y = 0
y– + 4y¿ + 5y = 0y– + 9y = 0
3y– - 20y¿ + 12y = 08y– - 10y¿ - 3y = 0
9y– - y = 02y– - y¿ - 3y = 0
y– - 64y = 0y– - 4y = 0
y– - 9y = 0y– + 3y¿ - 4y = 0
3y– - y¿ = 0y– - y¿ - 12y = 0
In Exercises 41–55, find the general solution.
41. 42.
43. 44.
45. 46.
47. 48.
49. 50.
51. 52.
53. 54.
55.
In Exercises 56–60, solve the initial value problem.
56.
57.
58.
59.
60.
61. Prove that the two solution functions in Theorem 3 are linearly in-dependent.
62. Prove that the two solution functions in Theorem 4 are linearly in-dependent.
63. Prove that the two solution functions in Theorem 5 are linearly in-dependent.
64. Prove that if and are linearly independent solutions to thehomogeneous equation (2), then the functions and
are also linearly independent solutions.
65. a. Show that there is no solution to the boundary value problem
b. Show that there are infinitely many solutions to the boundaryvalue problem
66. Show that if a, b, and c are positive constants, then all solutions ofthe homogeneous differential equation
approach zero as x : q .
ay– + by¿ + cy = 0
y– + 4y = 0, y(0) = 0, y(p) = 0.
y– + 4y = 0, y(0) = 0, y(p) = 1.
y4 = y1 - y2
y3 = y1 + y2
y2y1
4y– + 4y¿ + 5y = 0, y(p) = 1, y¿(p) = 0
3y– + y¿ - 14y = 0, y(0) = 2, y¿(0) = -1
4y– - 4y¿ + y = 0, y(0) = -1, y¿(0) = 2
y– + 2y¿ + y = 0, y(0) = 1, y¿(0) = 1
y– - 2y¿ + 2y = 0, y(0) = 0, y¿(0) = 2
6y– - 5y¿ - 4y = 0
4y– + 16y¿ + 52y = 09y– + 24y¿ + 16y = 0
6y– - 5y¿ - 6y = 016y– - 24y¿ + 9y = 0
y– + 4y¿ + 6y = 04y– + 4y¿ + 5y = 0
6y– + 13y¿ - 5y = 025y– + 10y¿ + y = 0
y– + 2y¿ + 2y = 04y– + 20y = 0
9y– + 12y¿ + 4y = 04y– + 4y¿ + y = 0
6y– - y¿ - y = 0y– - 2y¿ - 3y = 0
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-7
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16-8 Chapter 16: Second-Order Differential Equations
Nonhomogeneous Linear Equations
In this section we study two methods for solving second-order linear nonhomogeneousdifferential equations with constant coefficients. These are the methods of undeterminedcoefficients and variation of parameters. We begin by considering the form of the generalsolution.
Form of the General Solution
Suppose we wish to solve the nonhomogeneous equation
(1)
where a, b, and c are constants and G is continuous over some open interval I. Letbe the general solution to the associated complementary equation
(2)
(We learned how to find in Section 16.1.) Now suppose we could somehow come upwith a particular function that solves the nonhomogeneous equation (1). Then the sum
(3)
also solves the nonhomogeneous equation (1) because
Moreover, if is the general solution to the nonhomogeneous equation (1), it musthave the form of Equation (3). The reason for this last statement follows from the observa-tion that for any function satisfying Equation (1), we have
Thus, is the general solution to the homogeneous equation (2). We haveestablished the following result.
yc = y - yp
= G(x) - G(x) = 0.
= (ay– + by¿ + cy) - (ayp– + byp¿ + cyp)
a(y - yp)– + b(y - yp)¿ + c(y - yp)
yp
y = y(x)
= G(x).
= 0 + G(x)
= (ayc– + byc¿ + cyc) + (ayp– + byp¿ + cyp)
a(yc + yp)– + b(yc + yp)¿ + c(yc + yp)
y = yc + yp
yp
yc
ay– + by¿ + cy = 0.
yc = c1y1 + c2y2
ay– + by¿ + cy = G(x),
16.2
solves Eq. (2) and solves Eq. (1)ypyc
THEOREM 7 The general solution to the nonhomogeneous differen-tial equation (1) has the form
,
where the complementary solution is the general solution to the associatedhomogeneous equation (2) and is any particular solution to the nonhomoge-neous equation (1).
yp
yc
y = yc + yp
y = y(x)
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-8
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe Method of Undetermined Coefficients
This method for finding a particular solution to nonhomogeneous equation (1) appliesto special cases for which is a sum of terms of various polynomials multiplyingan exponential with possibly sine or cosine factors. That is, is a sum of terms of thefollowing forms:
For instance, and represent functions in this category.(Essentially these are functions solving homogeneous linear differential equations withconstant coefficients, but the equations may be of order higher than two.) We now presentseveral examples illustrating the method.
EXAMPLE 1 Solve the nonhomogeneous equation
Solution The auxiliary equation for the complementary equation is
It has the roots and giving the complementary solution
.
Now is a polynomial of degree 2. It would be reasonable to assume that aparticular solution to the given nonhomogeneous equation is also a polynomial of degree 2because if y is a polynomial of degree 2, then is also a polynomial of de-gree 2. So we seek a particular solution of the form
We need to determine the unknown coefficients A, B, and C. When we substitute the poly-nomial and its derivatives into the given nonhomogeneous equation, we obtain
or, collecting terms with like powers of x,
This last equation holds for all values of x if its two sides are identical polynomials ofdegree 2. Thus, we equate corresponding powers of x to get
and
These equations imply in turn that A � , B � , and C � Substituting thesevalues into the quadratic expression for our particular solution gives
By Theorem 7, the general solution to the nonhomogeneous equation is
13
x2 - 49
x + 527
.+c1e- x + c2e
3xy = yc + yp =
yp = 13
x2 - 49
x + 527
.
5>27.-4>91>32A - 2B - 3C = 1.-4A - 3B = 0,-3A = -1,
-3Ax2 + (-4A - 3B)x + (2A - 2B - 3C) = 1 - x2.
2A - 2(2Ax + B) - 3(Ax2 + Bx + C) = 1 - x2
yp
yp = Ax2 + Bx + C.
y– - 2y¿ - 3y
G(x) = 1 - x2
yc = c1e- x + c2e
3x
r = 3r = -1
r2 - 2r - 3 = (r + 1)(r - 3) = 0.
y– - 2y¿ - 3y = 0
y– - 2y¿ - 3y = 1 - x2.
5ex - sin 2x1 - x, e2x, xex, cos x,
p3(x)eax sin bx.p2(x)eax cos bx,p1(x)erx,
G(x)p(x)G(x)
yp
16.2 Nonhomogeneous Linear Equations 16-9
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-9
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 2 Find a particular solution of
Solution If we try to find a particular solution of the form
and substitute the derivatives of in the given equation, we find that A must satisfy theequation
for all values of x. Since this requires A to equal both 2 and 0 at the same time, we con-clude that the nonhomogeneous differential equation has no solution of the form .
It turns out that the required form is the sum
.
The result of substituting the derivatives of this new trial solution into the differentialequation is
or
.
This last equation must be an identity. Equating the coefficients for like terms on each sidethen gives
and .
Simultaneous solution of these two equations gives and . Our particularsolution is
.
EXAMPLE 3 Find a particular solution of .
Solution If we substitute
and its derivatives in the differential equation, we find that
or
.
However, the exponential function is never zero. The trouble can be traced to the fact thatis already a solution of the related homogeneous equation
.
The auxiliary equation is
which has as a root. So we would expect to become zero when substituted intothe left-hand side of the differential equation.
The appropriate way to modify the trial solution in this case is to multiply by x.Thus, our new trial solution is
.yp = Axex
Aex
Aexr = 1
r2 - 3r + 2 = (r - 1)(r - 2) = 0,
y– - 3y¿ + 2y = 0
y = ex
0 = 5ex
Aex - 3Aex + 2Aex = 5ex
yp = Aex
y– - 3y¿ + 2y = 5ex
yp = cos x - sin x
B = 1A = -1
A + B = 0B - A = 2
(B - A) sin x - (A + B) cos x = 2 sin x
-A sin x - B cos x - (A cos x - B sin x) = 2 sin x
yp = A sin x + B cos x
A sin x-
-A sin x + A cos x = 2 sin x
yp
yp = A sin x
y– - y¿ = 2 sin x.
16-10 Chapter 16: Second-Order Differential Equations
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-10
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe result of substituting the derivatives of this new candidate into the differential equation is
or
.
Thus, gives our sought-after particular solution
.
EXAMPLE 4 Find a particular solution of .
Solution The auxiliary equation for the complementary equation
has as a repeated root. The appropriate choice for in this case is neither norbecause the complementary solution contains both of those terms already. Thus, we
choose a term containing the next higher power of x as a factor. When we substitute
and its derivatives in the given differential equation, we get
or
.
Thus, , and the particular solution is
.
When we wish to find a particular solution of Equation (1) and the function is thesum of two or more terms, we choose a trial function for each term in and add them.
EXAMPLE 5 Find the general solution to .
Solution We first check the auxiliary equation
.
Its roots are and . Therefore, the complementary solution to the associated ho-mogeneous equation is
.
We now seek a particular solution . That is, we seek a function that will producewhen substituted into the left-hand side of the given differential equation.
One part of is to produce , the other .Since any function of the form is a solution of the associated homogeneous equa-
tion, we choose our trial solution to be the sum
,
including where we might otherwise have included only . When the derivatives of are substituted into the differential equation, the resulting equation is
- (Axex + Aex - 2B sin 2x + 2C cos 2x) = 5ex - sin 2x
(Axex + 2Aex - 4B cos 2x - 4C sin 2x)
ypexxex
yp = Axex + B cos 2x + C sin 2x
yp
c1ex
-sin 2x5exyp
5ex - sin 2xyp
yc = c1ex + c2
r = 0r = 1
r2 - r = 0
y– - y¿ = 5ex - sin 2x
G(x)G(x)
yp = 12
x2e3x
A = 1>22Ae3x = e3x
(9Ax2e3x + 12Axe3x + 2Ae3x) - 6(3Ax2e3x + 2Axe3x) + 9Ax2e3x = e3x
yp = Ax2e3x
Axe3xAe3xypr = 3
r2 - 6r + 9 = (r - 3)2 = 0
y– - 6y¿ + 9y = e3x
yp = -5xex
A = -5
-Aex = 5ex
(Axex + 2Aex) - 3(Axex + Aex) + 2Axex = 5ex
16.2 Nonhomogeneous Linear Equations 16-11
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-11
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufior
.
This equation will hold if
or and Our particular solution is
.
The general solution to the differential equation is
.
You may find the following table helpful in solving the problems at the end of thissection.
+ 5xex - 110
cos 2x + 15 sin 2xc1e
x + c2y = yc + yp =
yp = 5xex - 110
cos 2x + 15 sin 2x
C = 1>5.B = -1>10,A = 5,
2B - 4C = -1,4B + 2C = 0,A = 5,
Aex - (4B + 2C ) cos 2x + (2B - 4C ) sin 2x = 5ex - sin 2x
16-12 Chapter 16: Second-Order Differential Equations
TABLE 16.1 The method of undetermined coefficients for selected equationsof the form
.
If has a term Then include thisthat is a constant expression in themultiple of . . . And if trial function for
r is not a root ofthe auxiliary equation
r is a single root of theauxiliary equation
r is a double root of theauxiliary equation
sin kx, cos kx k is not a root ofthe auxiliary equation
0 is not a root of theauxiliary equation
0 is a single root of theauxiliary equation
0 is a double root of theauxiliary equation
Dx4 + Ex3 + Fx2
Dx3 + Ex2 + Fx
Dx2 + Ex + Fpx2 + qx + m
B cos kx + C sin kx
Ax2erx
Axerx
Aerxerx
yp.
G(x)
ay– + by¿ + cy = G(x)
The Method of Variation of Parameters
This is a general method for finding a particular solution of the nonhomogeneous equation(1) once the general solution of the associated homogeneous equation is known. Themethod consists of replacing the constants and in the complementary solution byfunctions and and requiring (in a way to be explained) that they2 = y2(x)y1 = y1(x)
c2c1
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-12
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiresulting expression satisfy the nonhomogeneous equation (1). There are two functions tobe determined, and requiring that Equation (1) be satisfied is only one condition. As a sec-ond condition, we also require that
. (4)
Then we have
If we substitute these expressions into the left-hand side of Equation (1), we obtain
The first two parenthetical terms are zero since and are solutions of the associatedhomogeneous equation (2). So the nonhomogeneous equation (1) is satisfied if, in additionto Equation (4), we require that
. (5)
Equations (4) and (5) can be solved together as a pair
for the unknown functions and . The usual procedure for solving this simple systemis to use the method of determinants (also known as Cramer’s Rule), which will be demon-strated in the examples to follow. Once the derivative functions and are known, thetwo functions and can be found by integration. Here is a summaryof the method.
y2 = y2(x)y1 = y1(x)y2¿y1¿
y2¿y1¿
y1¿y1¿ + y2¿y2¿ =G(x)
a
y1¿y1 + y2¿y2 = 0,
a(y1¿y1¿ + y2¿y2¿) = G(x)
y2y1
+ a(y1¿y1¿ + y2¿y2¿) = G(x).y1(ay1– + by1¿ + cy1) + y2(ay2– + by2¿ + cy2)
y– = y1y1– + y2y2– + y1¿y1¿ + y2¿y2¿. y¿ = y1y1¿ + y2y2¿, y = y1y1 + y2y2,
y1¿y1 + y2¿y2 = 0
16.2 Nonhomogeneous Linear Equations 16-13
Variation of Parameters Procedure
To use the method of variation of parameters to find a particular solution to thenonhomogeneous equation
,
we can work directly with the Equations (4) and (5). It is not necessary to re-derive them. The steps are as follows.
1. Solve the associated homogeneous equation
to find the functions and .2. Solve the equations
simultaneously for the derivative functions and .3. Integrate and to find the functions and .4. Write down the particular solution to nonhomogeneous equation (1) as
.yp = y1y1 + y2y2
y2 = y2(x)y1 = y1(x)y2¿y1¿y2¿y1¿
y1¿y1¿ + y2¿y2¿ =G(x)
a
y1¿y1 + y2¿y2 = 0,
y2y1
ay– + by¿ + cy = 0
ay– + by¿ + cy = G(x)
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-13
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 6 Find the general solution to the equation
Solution The solution of the homogeneous equation
is given by
.
Since and , the conditions to be satisfied in Equations (4) and(5) are
Solution of this system gives
Likewise,
After integrating and we have
,
and
.
Note that we have omitted the constants of integration in determining and . Theywould merely be absorbed into the arbitrary constants in the complementary solution.
Substituting and into the expression for in Step 4 gives
The general solution is
.y = c1 cos x + c2 sin x - (cos x) ln ƒ sec x + tan x ƒ
= (-cos x) ln ƒ sec x + tan x ƒ.
yp = [- ln ƒ sec x + tan x ƒ + sin x] cos x + (-cos x) sin x
ypy2y1
y2y1
y2(x) = Lsin x dx = -cos x
= - ln ƒ sec x + tan x ƒ + sin x
= -L(sec x - cos x) dx
y1(x) = L-sin2 x cos x dx
y2¿,y1¿
y2¿ =` cos x 0
-sin x tan x`
` cos x sin x
-sin x cos x`
= sin x.
y1¿ =` 0 sin x
tan x cos x`
` cos x sin x
-sin x cos x`
= - tan x sin xcos2 x + sin2 x
= -sin2 x cos x .
a = 1-y1¿ sin x + y2¿ cos x = tan x.
y1¿ cos x + y2¿ sin x = 0,
y2(x) = sin xy1(x) = cos x
yc = c1 cos x + c2 sin x
y– + y = 0
y– + y = tan x.
16-14 Chapter 16: Second-Order Differential Equations
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-14
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 7 Solve the nonhomogeneous equation
.
Solution The auxiliary equation is
giving the complementary solution
The conditions to be satisfied in Equations (4) and (5) are
Solving the above system for and gives
Likewise,
Integrating to obtain the parameter functions, we have
and
Therefore,
The general solution to the differential equation is
where the term in has been absorbed into the term in the complementarysolution.
c2exyp(1>27)ex
y = c1e-2x + c2e
x - 19
xex + 16
x2ex,
= 127
ex - 19
xex + 16
x2ex.
yp = c(1 - 3x)e3x
27de-2x + ax2
6bex
y2(x) = Lx3
dx = x2
6.
= 127
(1 - 3x)e3x,
= - 13axe3x
3- L
e3x
3 dxb
y1(x) = L - 13
xe3x dx
y2¿ =` e - 2x 0
-2e - 2x xex `3e-x = xe-x
3e-x = x3
.
y1¿ =` 0 ex
xex ex `` e - 2x ex
-2e - 2x ex `= -xe2x
3e - x = - 13
xe3x.
y2¿y1¿
a = 1-2y1¿e - 2x + y2¿ex = xex.
y1¿e - 2x + y2¿ex = 0,
yc = c1e- 2x + c2e
x.
r2 + r - 2 = (r + 2)(r - 1) = 0
y– + y¿ - 2y = xex
16.2 Nonhomogeneous Linear Equations 16-15
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-15
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16-16 Chapter 16: Second-Order Differential Equations
EXERCISES 16.2
Solve the equations in Exercises 1–16 by the method of undeterminedcoefficients.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11.
12.
13. 14.
15. 16.
Solve the equations in Exercises 17–28 by variation of parameters.
17.
18.
19. 20.
21. 22.
23. 24.
25. 26.
27.
28.
In each of Exercises 29–32, the given differential equation has a par-ticular solution of the form given. Determine the coefficients in Then solve the differential equation.
29.
30.
31.
32.
In Exercises 33–36, solve the given differential equations (a) byvariation of parameters, and (b) by the method of undeterminedcoefficients.
33. 34.
35. 36.d2y
dx2 - 9dy
dx= 9e9x
d2y
dx2 - 4dy
dx- 5y = ex + 4
d2y
dx2 - 4dy
dx+ 4y = 2e2x
d2y
dx2 -dy
dx= ex + e-x
y– + y¿ - 2y = xex, yp = Ax2ex + Bxex
y– + y = 2 cos x + sin x, yp = Ax cos x + Bx sin x
y– - y¿ = cos x + sin x, yp = A cos x + B sin x
y– - 5y¿ = xe5x, yp = Ax2e5x + Bxe5x
yp.yp
d2y
dx2 -dy
dx= ex cos x, x 7 0
d2y
dx2 + y = sec x, -p2
6 x 6 p2
y– - y¿ = 2xy– + 4y¿ + 5y = 10
y– - y = sin xy– - y = ex
y– - y = xy– + 2y¿ + y = e-x
y– + 2y¿ + y = exy– + y = sin x
y– + y = tan x, -p2
6 x 6 p2
y– + y¿ = x
d2y
dx2 + 7dy
dx= 42x2 + 5x + 1
d2y
dx2 - 3dy
dx= e3x - 12x
d2y
dx2 -dy
dx= -8x + 3
d2y
dx2 + 5dy
dx= 15x2
y– + 3y¿ + 2y = e-x + e-2x - x
y– - y¿ - 6y = e-x - 7 cos x
y– + 2y¿ + y = 6 sin 2xy– - y = ex + x2
y– + y = 2x + 3exy– - y¿ - 2y = 20 cos x
y– + y = e2xy– + y = cos 3x
y– + 2y¿ + y = x2y– - y¿ = sin x
y– - 3y¿ - 10y = 2x - 3y– - 3y¿ - 10y = -3
Solve the differential equations in Exercises 37–46. Some of the equa-tions can be solved by the method of undetermined coefficients, butothers cannot.
37.
38.
39. 40.
41. 42.
43. 44.
45.
46.
The method of undetermined coefficients can sometimes be used tosolve first-order ordinary differential equations. Use the method tosolve the equations in Exercises 47–50.
47. 48.
49. 50.
Solve the differential equations in Exercises 51 and 52 subject to thegiven initial conditions.
51.
52.
In Exercises 53–58, verify that the given function is a particular solu-tion to the specified nonhomogeneous equation. Find the general solu-tion and evaluate its arbitrary constants to find the unique solution sat-isfying the equation and the given initial conditions.
53.
54.
55.
56.
57.
58.
In Exercises 59 and 60, two linearly independent solutions and are given to the associated homogeneous equation of the variable-coefficient nonhomogeneous equation. Use the method of variation ofparameters to find a particular solution to the nonhomogeneous equa-tion. Assume in each exercise.
59.
60. x2y– + xy¿ - y = x, y1 = x - 1, y2 = x
x2y– + 2xy¿ - 2y = x2, y1 = x - 2, y2 = x
x 7 0
y2y1
yp = xex ln x, y(1) = e, y¿(1) = 0
y– - 2y¿ + y = x-1ex, x 7 0,
y– - 2y¿ + y = 2ex, yp = x2ex, y(0) = 1, y¿(0) = 0
y– - y¿ - 2y = 1 - 2x, yp = x - 1, y(0) = 0, y¿(0) = 1
yp = 2ex cos x, y(0) = 0, y¿(0) = 1
12
y– + y¿ + y = 4ex(cos x - sin x),
y– + y = x, yp = 2 sin x + x, y(0) = 0, y¿(0) = 0
y– + y¿ = x, yp = x2
2- x, y(0) = 0, y¿(0) = 0
d2y
dx2 + y = e2x; y(0) = 0, y¿(0) = 25
d2y
dx2 + y = sec2 x, -p2
6 x 6 p2
; y (0) = y¿(0) = 1
y¿ + y = sin xy¿ - 3y = 5e3x
y¿ + 4y = xy¿ - 3y = ex
y– - 3y¿ + 2y = ex - e2x
y– + y = sec x tan x, -p2
6 x 6 p2
y– + 9y = 9x - cos xy– + 2y¿ = x2 - ex
y– + 4y¿ + 5y = x + 2y– - y¿ = x3
y– + 4y = sin xy– - 8y¿ = e8x
y– + y = csc x, 0 6 x 6 py– + y = cot x, 0 6 x 6 p
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-16
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16.3 Applications 16-17
Applications
In this section we apply second-order differential equations to the study of vibratingsprings and electric circuits.
Vibrations
A spring has its upper end fastened to a rigid support, as shown in Figure 16.2. An objectof mass m is suspended from the spring and stretches it a length s when the spring comesto rest in an equilibrium position. According to Hooke’s Law (Section 6.6), the tensionforce in the spring is , where k is the spring constant. The force due to gravity pullingdown on the spring is , and equilibrium requires that
(1)
Suppose that the object is pulled down an additional amount beyond the equilibrium po-sition and then released. We want to study the object’s motion, that is, the vertical positionof its center of mass at any future time.
Let y, with positive direction downward, denote the displacement position of the ob-ject away from the equilibrium position at any time t after the motion has started.Then the forces acting on the object are (see Figure 16.3)
the propulsion force due to gravity,
the restoring force of the spring’s tension,
a frictional force assumed proportional to velocity.
The frictional force tends to retard the motion of the object. The resultant of these forces is, and by Newton’s second law , we must then have
.
By Equation (1), , so this last equation becomes
(2)
subject to the initial conditions and . (Here we use the prime notationto denote differentiation with respect to time t.)
You might expect that the motion predicted by Equation (2) will be oscillatory aboutthe equilibrium position and eventually damp to zero because of the retarding fric-tional force. This is indeed the case, and we will show how the constants m, , and k deter-mine the nature of the damping. You will also see that if there is no friction (so ),then the object will simply oscillate indefinitely.
Simple Harmonic Motion
Suppose first that there is no retarding frictional force. Then and there is no damp-ing. If we substitute to simplify our calculations, then the second-order equa-tion (2) becomes
with and .y¿(0) = 0y(0) = y0y– + v2y = 0,
v = 2k>m d = 0
d = 0d
y = 0
y¿(0) = 0y(0) = y0
md2y
dt2 + ddydt
+ ky = 0,
mg - ks = 0
md2y
dt2 = mg - ks - ky - ddydt
F = maF = Fp - Fs - Fr
Fr = ddydt
,
Fs = k(s + y),
Fp = mg,
y = 0
y0
ks = mg.
mgks
16.3
y
y � 0
s
mass mat equilibrium
FIGURE 16.2 Mass mstretches a spring bylength s to the equilibriumposition at y = 0.
y
y � 0
y
y0
s
Fs Fr
Fp
a positionafter release
startposition
FIGURE 16.3 The propulsionforce (weight) pulls the massdownward, but the springrestoring force and frictionalforce pull the mass upward.The motion starts at withthe mass vibrating up and down.
y = y0
Fr
Fs
Fp
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-17
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe auxiliary equation is
having the imaginary roots . The general solution to the differential equation in(2) is
(3)
To fit the initial conditions, we compute
and then substitute the conditions. This yields and . The particular solution
(4)
describes the motion of the object. Equation (4) represents simple harmonic motion ofamplitude and period .
The general solution given by Equation (3) can be combined into a single term byusing the trigonometric identity
.
To apply the identity, we take (see Figure 16.4)
and ,
where
and
Then the general solution in Equation (3) can be written in the alternative form
(5)
Here C and may be taken as two new arbitrary constants, replacing the two constants and . Equation (5) represents simple harmonic motion of amplitude C and period
. The angle is called the phase angle, and may be interpreted as itsinitial value. A graph of the simple harmonic motion represented by Equation (5) is givenin Figure 16.5.
fvt + fT = 2p>vc2
c1f
y = C sin (vt + f).
f = tan-1 c1c2
.C = 2c1 2 + c2 2
c2 = C cos fc1 = C sin f
sin (vt + f) = cos vt sin f + sin vt cos f
T = 2p>vy0
y = y0 cos vt
c2 = 0c1 = y0
y¿ = -c1v sin vt + c2v cos vt
y = c1 cos vt + c2 sin vt.
r = ;vi
r2 + v2 = 0,
16-18 Chapter 16: Second-Order Differential Equations
�
c2
c1
C = �c12 + c2
2
FIGURE 16.4 and.c2 = C cos f
c1 = C sin f
y
t
–C
C
0
C sin �
y = C sin(�t + �)
T = 2��
Period
FIGURE 16.5 Simple harmonic motion of amplitude Cand period T with initial phase angle (Equation 5).f
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-18
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiDamped Motion
Assume now that there is friction in the spring system, so . If we substituteand , then the differential equation (2) is
(6)
The auxiliary equation is
with roots . Three cases now present themselves, depending uponthe relative sizes of b and .
Case 1: . The double root of the auxiliary equation is real and equals . Thegeneral solution to Equation (6) is
.
This situation of motion is called critical damping and is not oscillatory. Figure 16.6ashows an example of this kind of damped motion.
Case 2: . The roots of the auxiliary equation are real and unequal, given by
and . The general solution to Equation (6)is given by
.
Here again the motion is not oscillatory and both and are negative. Thus y approacheszero as time goes on. This motion is referred to as overdamping (see Figure 16.6b).
Case 3: . The roots to the auxiliary equation are complex and given by. The general solution to Equation (6) is given by
This situation, called underdamping, represents damped oscillatory motion. It is analo-gous to simple harmonic motion of period except that the amplitudeis not constant but damped by the factor . Therefore, the motion tends to zero as tincreases, so the vibrations tend to die out as time goes on. Notice that the period
is larger than the period in the friction-free system.Moreover, the larger the value of in the exponential damping factor, the morequickly the vibrations tend to become unnoticeable. A curve illustrating underdamped mo-tion is shown in Figure 16.6c.
b = d>2mT0 = 2p>vT = 2p>2v2 - b2
e - btT = 2p>2v2 - b2
y = e - bt Ac1 cos2v2 - b2 t + c2 sin2v2 - b2 t B .r = -b ; i2v2 - b2
b<V
r2r1
y = c1e A- b +2b2 -v2Bt + c2e A- b -2b2 -v2Bt
r2 = -b - 2b2 - v2r1 = -b + 2b2 - v2
b>V
y = (c1 + c2t)e-vt
r = vb � V
v
r = -b ; 2b2 - v2
r2 + 2br + v2 = 0,
y– + 2by¿ + v2y = 0.
2b = d>mv = 2k>m d Z 0
16.3 Applications 16-19
y
t
y
t
y
t
(a) Critical damping (b) Overdamping (c) Underdamping
y = (1 + t)e–t y = 2e–2t – e–t y = e–t sin (5t + �/4)0 0 0
FIGURE 16.6 Three examples of damped vibratory motion for a spring system withfriction, so d Z 0.
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-19
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiAn external force can also be added to the spring system modeled by Equation(2). The forcing function may represent an external disturbance on the system. For in-stance, if the equation models an automobile suspension system, the forcing functionmight represent periodic bumps or potholes in the road affecting the performance of thesuspension system; or it might represent the effects of winds when modeling the verticalmotion of a suspension bridge. Inclusion of a forcing function results in the second-ordernonhomogeneous equation
(7)
We leave the study of such spring systems to a more advanced course.
Electric Circuits
The basic quantity in electricity is the charge q (analogous to the idea of mass). In an elec-tric field we use the flow of charge, or current , as we might use velocity in agravitational field. There are many similarities between motion in a gravitational field andthe flow of electrons (the carriers of charge) in an electric field.
Consider the electric circuit shown in Figure 16.7. It consists of four components:voltage source, resistor, inductor, and capacitor. Think of electrical flow as being like afluid flow, where the voltage source is the pump and the resistor, inductor, and capacitortend to block the flow. A battery or generator is an example of a source, producing a volt-age that causes the current to flow through the circuit when the switch is closed. An elec-tric light bulb or appliance would provide resistance. The inductance is due to a magneticfield that opposes any change in the current as it flows through a coil. The capacitance isnormally created by two metal plates that alternate charges and thus reverse the currentflow. The following symbols specify the quantities relevant to the circuit:
q: charge at a cross section of a conductor measured in coulombs (abbreviated c);
I: current or rate of change of charge dq/dt (flow of electrons) at a cross section of aconductor measured in amperes (abbreviated A);
E: electric (potential) source measured in volts (abbreviated V);
V: difference in potential between two points along the conductor measured in volts (V).
I = dq>dt
md2y
dt2 + ddydt
+ ky = F(t).
F(t)
16-20 Chapter 16: Second-Order Differential Equations
R, Resistor
C, Capacitor
L, InductorEVoltage
source
FIGURE 16.7 An electric circuit.
Ohm observed that the current I flowing through a resistor, caused by a potential dif-ference across it, is (approximately) proportional to the potential difference (voltage drop).He named his constant of proportionality and called R the resistance. So Ohm’s law is
I = 1R
V.
1>R
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-20
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16.3 Applications 16-21
Linear Second-Order Constant-Coefficient Models
Mechanical System Electrical System
y: displacement q: charge: velocity : current: acceleration : change in current
m: mass L: inductance: damping constant R: resistance
k: spring constant 1 C: where C is the capacitanceF(t): forcing function E(t): voltage source
>d
q–y–q¿y¿
Lq– + Rq¿ + 1C
q = E(t)my– + dy¿ + ky = F(t)
EXERCISES 16.3
1. A 16-lb weight is attached to the lower end of a coil spring sus-pended from the ceiling and having a spring constant of 1 lb ft.The resistance in the spring-mass system is numerically equal tothe instantaneous velocity. At the weight is set in motionfrom a position 2 ft below its equilibrium position by giving it adownward velocity of 2 ft sec. Write an initial value problem thatmodels the given situation.
>t = 0
> 2. An 8-lb weight stretches a spring 4 ft. The spring–mass system re-sides in a medium offering a resistance to the motion that is nu-merically equal to 1.5 times the instantaneous velocity. If theweight is released at a position 2 ft above its equilibrium positionwith a downward velocity of 3 ft sec, write an initial value prob-lem modeling the given situation.
>
Similarly, it is known from physics that the voltage drops across an inductor and a ca-pacitor are
and
where L is the inductance and C is the capacitance (with q the charge on the capacitor).The German physicist Gustav R. Kirchhoff (1824–1887) formulated the law that the
sum of the voltage drops in a closed circuit is equal to the supplied voltage . Symboli-cally, this says that
Since , Kirchhoff’s law becomes
(8)
The second-order differential equation (8), which models an electric circuit, has exactlythe same form as Equation (7) modeling vibratory motion. Both models can be solvedusing the methods developed in Section 16.2.
Summary
The following chart summarizes our analogies for the physics of motion of an object in aspring system versus the flow of charged particles in an electrical circuit.
L d2q
dt2 + R dqdt
+ 1C
q = E(t).
I = dq>dt
RI + L dIdt
+qC
= E(t).
E(t)
qC
,L dIdt
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-21
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi3. A 20-lb weight is hung on an 18-in. spring and stretches it 6 in.The weight is pulled down 5 in. and 5 lb are added to the weight. Ifthe weight is now released with a downward velocity of in. sec,write an initial value problem modeling the vertical displacement.
4. A 10-lb weight is suspended by a spring that is stretched 2 in. bythe weight. Assume a resistance whose magnitude is lbtimes the instantaneous velocity y in feet per second. If the weightis pulled down 3 in. below its equilibrium position and released,formulate an initial value problem modeling the behavior of thespring–mass system.
5. An (open) electrical circuit consists of an inductor, a resistor, anda capacitor. There is an initial charge of 2 coulombs on the capac-itor. At the instant the circuit is closed, a current of 3 amperes ispresent and a voltage of cos t is applied. In this circuitthe voltage drop across the resistor is 4 times the instantaneouschange in the charge, the voltage drop across the capacitor is 10 times the charge, and the voltage drop across the inductor is2 times the instantaneous change in the current. Write an initialvalue problem to model the circuit.
6. An inductor of 2 henrys is connected in series with a resistorof 12 ohms, a capacitor of 1 16 farad, and a 300 volt battery.Initially, the charge on the capacitor is zero and the current iszero. Formulate an initial value problem modeling this electricalcircuit.
Mechanical units in the British and metric systems may be helpfulin doing the following problems.
Unit British System MKS System
Distance Feet (ft) Meters (m)Mass Slugs Kilograms (kg)Time Seconds (sec) Seconds (sec)Force Pounds (lb) Newtons (N)g(earth) 32 ft sec2 9.81 m sec2
7. A 16-lb weight is attached to the lower end of a coil spring sus-pended from the ceiling and having a spring constant of 1 lb ft.The resistance in the spring–mass system is numerically equal tothe instantaneous velocity. At the weight is set in motionfrom a position 2 ft below its equilibrium position by giving it adownward velocity of 2 ft sec. At the end of sec, determinewhether the mass is above or below the equilibrium position andby what distance.
8. An 8-lb weight stretches a spring 4 ft. The spring–mass systemresides in a medium offering a resistance to the motion equal to1.5 times the instantaneous velocity. If the weight is released at aposition 2 ft above its equilibrium position with a downwardvelocity of 3 ft sec, find its position relative to the equilibriumposition 2 sec later.
9. A 20-lb weight is hung on an 18-in. spring stretching it 6 in. Theweight is pulled down 5 in. and 5 lb are added to the weight. If theweight is now released with a downward velocity of in. sec,find the position of mass relative to the equilibrium in terms of and valid for any time .t Ú 0
y0
>y0
>
p>t = 0
>
>>
>
Estd = 20
20>1g
>y0
10. A mass of 1 slug is attached to a spring whose constant is 25 4lb ft. Initially the mass is released 1 ft above the equilibrium posi-tion with a downward velocity of 3 ft sec, and the subsequentmotion takes place in a medium that offers a damping force nu-merically equal to 3 times the instantaneous velocity. An externalforce ƒ(t) is driving the system, but assume that initially .Formulate and solve an initial value problem that models thegiven system. Interpret your results.
11. A 10-lb weight is suspended by a spring that is stretched 2 in. bythe weight. Assume a resistance whose magnitude is lbtimes the instantaneous velocity in feet per second. If the weightis pulled down 3 in. below its equilibrium position and released,find the time required to reach the equilibrium position for thefirst time.
12. A weight stretches a spring 6 in. It is set in motion at a point 2 in. be-low its equilibrium position with a downward velocity of 2 in. sec.
a. When does the weight return to its starting position?
b. When does it reach its highest point?
c. Show that the maximum velocity is in. sec.
13. A weight of 10 lb stretches a spring 10 in. The weight is drawndown 2 in. below its equilibrium position and given an initial ve-locity of 4 in. sec. An identical spring has a different weight at-tached to it. This second weight is drawn down from its equilib-rium position a distance equal to the amplitude of the first motionand then given an initial velocity of 2 ft sec. If the amplitude ofthe second motion is twice that of the first, what weight is at-tached to the second spring?
14. A weight stretches one spring 3 in. and a second weight stretchesanother spring 9 in. If both weights are simultaneously pulleddown 1 in. below their respective equilibrium positions and thenreleased, find the first time after when their velocities areequal.
15. A weight of 16 lb stretches a spring 4 ft. The weight is pulleddown 5 ft below the equilibrium position and then released. Whatinitial velocity given to the weight would have the effect ofdoubling the amplitude of the vibration?
16. A mass weighing 8 lb stretches a spring 3 in. The spring–mass sys-tem resides in a medium with a damping constant of 2 lb-sec ft. Ifthe mass is released from its equilibrium position with a velocityof 4 in. sec in the downward direction, find the time required forthe mass to return to its equilibrium position for the first time.
17. A weight suspended from a spring executes damped vibrations witha period of 2 sec. If the damping factor decreases by 90% in 10 sec,find the acceleration of the weight when it is 3 in. below its equilib-rium position and is moving upward with a speed of 2 ft sec.
18. A 10-lb weight stretches a spring 2 ft. If the weight is pulled down6 in. below its equilibrium position and released, find the highestpoint reached by the weight. Assume the spring–mass system re-sides in a medium offering a resistance of lb times the in-stantaneous velocity in feet per second.
10>1g
>
>>
y0
t = 0
>
>
>212g + 1
>
40>1g
ƒ(t) K 0
>> >
16-22 Chapter 16: Second-Order Differential Equations
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-22
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16.4 Euler Equations 16-23
19. An LRC circuit is set up with an inductance of 1 5 henry, a resist-ance of 1 ohm, and a capacitance of 5 6 farad. Assuming the initialcharge is 2 coulombs and the initial current is 4 amperes, find thesolution function describing the charge on the capacitor at any time.What is the charge on the capacitor after a long period of time?
20. An (open) electrical circuit consists of an inductor, a resistor, anda capacitor. There is an initial charge of 2 coulombs on the capac-itor. At the instant the circuit is closed, a current of 3 amperes ispresent but no external voltage is being applied. In this circuit thevoltage drops at three points are numerically related as follows:across the capacitor, 10 times the charge; across the resistor, 4times the instantaneous change in the charge; and across the in-ductor, 2 times the instantaneous change in the current. Find thecharge on the capacitor as a function of time.
21. A 16-lb weight stretches a spring 4 ft. This spring–mass system isin a medium with a damping constant of 4.5 lb-sec ft, and an ex-ternal force given by (in pounds) is being ap-plied. What is the solution function describing the position of themass at any time if the mass is released from 2 ft below the equi-librium position with an initial velocity of 4 ft sec downward?
22. A 10-kg mass is attached to a spring having a spring constant of140 N m. The mass is started in motion from the equilibrium po-sition with an initial velocity of 1 m sec in the upward directionand with an applied external force given by sin t (in new-tons). The mass is in a viscous medium with a coefficient of re-sistance equal to 90 N-sec m. Formulate an initial value problemthat models the given system; solve the model and interpret theresults.
23. A 2-kg mass is attached to the lower end of a coil spring sus-pended from the ceiling. The mass comes to rest in its equilibrium
>ƒ(t) = 5
>>>
ƒ(t) = 4 + e - 2t>
> > position thereby stretching the spring 1.96 m. The mass is in aviscous medium that offers a resistance in newtons numericallyequal to 4 times the instantaneous velocity measured in metersper second. The mass is then pulled down 2 m below its equilib-rium position and released with a downward velocity of 3 m sec.At this same instant an external force given by cos t (innewtons) is applied to the system. At the end of sec determineif the mass is above or below its equilibrium position and by howmuch.
24. An 8-lb weight stretches a spring 4 ft. The spring–mass system re-sides in a medium offering a resistance to the motion equal to 1.5times the instantaneous velocity, and an external force given by
(in pounds) is being applied. If the weight is re-leased at a position 2 ft above its equilibrium position with down-ward velocity of 3 ft sec, find its position relative to the equilib-rium after 2 sec have elapsed.
25. Suppose henrys, ohms, farads,volts, coulombs, and . For-
mulate and solve an initial value problem that models the givenLRC circuit. Interpret your results.
26. A series circuit consisting of an inductor, a resistor, and a capaci-tor is open. There is an initial charge of 2 coulombs on the capac-itor, and 3 amperes of current is present in the circuit at the instantthe circuit is closed. A voltage given by is ap-plied. In this circuit the voltage drops are numerically equal to thefollowing: across the resistor to 4 times the instantaneous changein the charge, across the capacitor to 10 times the charge, andacross the inductor to 2 times the instantaneous change in the cur-rent. Find the charge on the capacitor as a function of time. Deter-mine the charge on the capacitor and the current at time .t = 10
E(t) = 20 cos t
q¿(0) = i(0) = 0q(0) = 10E = 100C = 1>500R = 10L = 10
>ƒ(t) = 6 + e - t
p
ƒ(t) = 20>
Euler Equations
In Section 16.1 we introduced the second-order linear homogeneous differential equation
and showed how to solve this equation when the coefficients P, Q, and R are constants. Ifthe coefficients are not constant, we cannot generally solve this differential equation interms of elementary functions we have studied in calculus. In this section you will learnhow to solve the equation when the coefficients have the special forms
and ,
where a, b, and c are constants. These special types of equations are called Euler equa-tions, in honor of Leonhard Euler who studied them and showed how to solve them. Suchequations arise in the study of mechanical vibrations.
The General Solution of Euler Equations
Consider the Euler equation
, (1)x 7 0.ax2y– + bxy¿ + cy = 0
R(x) = cQ(x) = bx,P(x) = ax2,
P(x)y–(x) + Q(x)y¿(x) + R(x)y(x) = 0
16.4
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-23
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTo solve Equation (1), we first make the change of variables
and .
We next use the chain rule to find the derivatives and :
and
Substituting these two derivatives into the left-hand side of Equation (1), we find
Therefore, the substitutions give us the second-order linear differential equation with con-stant coefficients
(2)
We can solve Equation (2) using the method of Section 16.1. That is, we find the roots tothe associated auxiliary equation
(3)
to find the general solution for After finding we can determine from thesubstitution
EXAMPLE 1 Find the general solution of the equation .
Solution This is an Euler equation with , , and . The auxiliary equa-tion (3) for is
,
with roots and . The solution for is given by
.
Substituting gives the general solution for :
.
EXAMPLE 2 Solve the Euler equation .
Solution Since , , and , the auxiliary equation (3) for is
.
The auxiliary equation has the double root giving
.
Substituting into this expression gives the general solution
.y(x) = c1e3 ln x + c2 ln x e3 ln x = c1 x3 + c2 x3 ln x
z = ln x
Y(z) = c1e3z + c2 ze3z
r = 3
r2 + (-5 - 1)r + 9 = (r - 3)2 = 0
Y(z)c = 9b = -5a = 1
x2y– - 5xy¿ + 9y = 0
y(x) = c1e-2 ln x + c2e
ln x = c1 x-2 + c2 x
y(x)z = ln x
Y(z) = c1e- 2z + c2e
z
Y(z)r = 1r = -2
r2 + (2 - 1)r - 2 = (r - 1)(r + 2) = 0
Y(z)c = -2b = 2a = 1
x2y– + 2xy¿ - 2y = 0
z = ln x.y(x)Y(z),Y(z).
ar2 + (b - a)r + c = 0
aY –(z) + (b - a)Y ¿(z) + cY(z) = 0.
= aY –(z) + (b - a)Y ¿(z) + cY(z).
ax2y– + bxy¿ + cy = ax2 a- 1x2 Y ¿(z) + 1
x2 Y –(z)b + bx a1x Y ¿(z)b + cY(z)
y–(x) = ddx
y¿(x) = ddx
Y ¿(z)1x = - 1
x2 Y ¿(z) + 1x Y –(z)
dzdx
= - 1x2 Y ¿(z) + 1
x2 Y –(z).
y¿(x) = ddx
Y(z) = ddz
Y(z)dzdx
= Y ¿(z)1x
y–(x)y¿(x)
y(x) = Y(z)z = ln x
16-24 Chapter 16: Second-Order Differential Equations
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-24
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 3 Find the particular solution to that satisfies theinitial conditions and .
Solution Here , , and substituted into the auxiliary equation (3)gives
.
The roots are and giving the solution
.
Substituting into this expression gives
.
From the initial condition , we see that and
.
To fit the second initial condition, we need the derivative
.
Since , we immediately obtain . Therefore, the particular solution satis-fying both initial conditions is
.
Since , the solution satisfies
.
A graph of the solution is shown in Figure 16.8.
- x2
8… y(x) … x2
8
-1 … sin (8 ln x) … 1
y(x) = 18
x2 sin (8 ln x)
c2 = 1>8y¿(1) = 1
y¿(x) = c2 A8x cos (8 ln x) + 2x sin (8 ln x) By(x) = c2 x
2 sin (8 ln x)
c1 = 0y(1) = 0
y(x) = e2 ln x Ac1 cos (8 ln x) + c2 sin (8 ln x) Bz = ln x
Y(z) = e2z(c1 cos 8z + c2 sin 8z)
r = 2 - 8ir = 2 + 8i
r2 - 4r + 68 = 0
c = 68b = -3a = 1
y¿(1) = 1y(1) = 0x2y– - 3xy¿ + 68y = 0
16.4 Euler Equations 16-25
20 4 6 8 10
–5
–10
5
10
y
x
y = x2 sin (8 lnx)18
FIGURE 16.8 Graph of the solution toExample 3.
16.4 EXERCISES
In Exercises 1–24, find the general solution to the given Eulerequation. Assume throughout.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11. 12.
13. 14.
15. 16.
17. 18.
19. 20. 4x2y– + y = 0x2y– + xy¿ = 0
x2y– - 3xy¿ + 9y = 0x2y– + 3xy¿ + y = 0
4x2y– - 4xy¿ + 5y = 04x2y– + 8xy¿ + 5y = 0
x2y– - 5xy¿ + 10y = 0x2y– + 3xy¿ + 10y = 0
x2y– + 7xy¿ + 13y = 0x2y– - xy¿ + 5y = 0
x2y– - xy¿ + 2y = 0x2y– - xy¿ + y = 0
x2y– + 6xy¿ + 4y = 03x2y– + 4xy¿ = 0
2x2y– + 7xy¿ + 2y = 0x2y– - 5xy¿ + 8y = 0
x2y– + xy¿ - y = 0x2y– - 6y = 0
x2y– + xy¿ - 4y = 0x2y– + 2xy¿ - 2y = 0
x 7 021.
22.
23.
24.
In Exercises 25–30, solve the given initial value problem.
25.
26.
27.
28.
29.
30. x2y– + 3xy¿ + 5y = 0, y(1) = 1, y¿(1) = 0
x2y– - xy¿ + 2y = 0, y(1) = -1, y¿(1) = 1
x2y– + 7xy¿ + 9y = 0, y(1) = 1, y¿(1) = 0
x2y– - xy¿ + y = 0, y(1) = 1, y¿(1) = 1
6x2y– + 7xy¿ - 2y = 0, y(1) = 0, y¿(1) = 1
x2y– + 3xy¿ - 3y = 0, y(1) = 1, y¿(1) = -1
4x2y– - 16xy¿ + 25y = 0
16x2y– + 56xy¿ + 25y = 0
16x2y– - 8xy¿ + 9y = 0
9x2y– + 15xy¿ + y = 0
5122_web_ch16.qxd 3/16/06 2:30 PM Page 16-25
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
16-26 Chapter 16: Second-Order Differential Equations
Power-Series Solutions
In this section we extend our study of second-order linear homogeneous equations withvariable coefficients. With the Euler equations in Section 16.4, the power of the variable xin the nonconstant coefficient had to match the order of the derivative with which it waspaired: with , with , and with . Here we drop that requirement so wecan solve more general equations.
Method of Solution
The power-series method for solving a second-order homogeneous differential equationconsists of finding the coefficients of a power series
(1)
which solves the equation. To apply the method we substitute the series and its derivativesinto the differential equation to determine the coefficients The technique forfinding the coefficients is similar to that used in the method of undetermined coefficientspresented in Section 16.2.
In our first example we demonstrate the method in the setting of a simple equationwhose general solution we already know. This is to help you become more comfortablewith solutions expressed in series form.
EXAMPLE 1 Solve the equation by the power-series method.
Solution We assume the series solution takes the form of
and calculate the derivatives
and
Substitution of these forms into the second-order equation gives us
Next, we equate the coefficients of each power of x to zero as summarized in the followingtable.
Power of x Coefficient Equation
or
or
or
or
or
or cn = - 1n(n - 1)
cn - 2= 0n(n - 1)cn + cn - 2xn - 2
oooc6 = - 1
6 # 5 c4= 06(5)c6 + c4x4
c5 = - 15 # 4
c3= 05(4)c5 + c3x3
c4 = - 14 # 3
c2= 04(3)c4 + c2x2
c3 = - 13 # 2
c1= 03(2)c3 + c1x1
c2 = - 12
c0= 02(1)c2 + c0x0
aq
n = 2 n(n - 1)cn xn - 2 + a
q
n = 0 cn xn = 0.
y– = aq
n = 2 n(n - 1)cnxn - 2.y¿ = a
q
n = 1 ncn xn - 1
y = aq
n = 0 cnxn
y– + y = 0
c0, c1, c2, Á .
y(x) = aq
n = 0 cn xn = c0 + c1x + c2x2 + Á
yx0 (=1)y¿x1y–x2
16.5
5122_web_ch16.qxd 3/16/06 2:31 PM Page 16-26
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiFrom the table we notice that the coefficients with even indices ( )are related to each other and the coefficients with odd indices ( ) are also inter-related. We treat each group in turn.
Even indices: Here , so the power is . From the last line of the table, we have
or
From this recursive relation we find
Odd indices: Here , so the power is . Substituting this into the lastline of the table yields
or
Thus,
Writing the power series by grouping its even and odd powers together and substitut-ing for the coefficients yields
.
From Table 8.1 in Section 8.10, we see that the first series on the right-hand side of the lastequation represents the cosine function and the second series represents the sine. Thus, thegeneral solution to is
.y = c0 cos x + c1 sin x
y– + y = 0
= c0aq
k = 0 (-1)k
(2k)!x2k + c1a
q
k = 0
(-1)k
(2k + 1)!x2k + 1
= aq
k = 0 c2kx2k + a
q
k = 0 c2k + 1x2k + 1
y = aq
n = 0 cnxn
=(-1)k
(2k + 1)! c1.
c2k + 1 = c- 1(2k + 1)(2k)
d c- 1(2k - 1)(2k - 2)
d Á c- 15(4)d c- 1
3(2)dc1
c2k + 1 = - 1(2k + 1)(2k)
c2k - 1.
(2k + 1)(2k)c2k + 1 + c2k - 1 = 0
x2k - 1n = 2k + 1
=(-1)k
(2k)! c0.
c2k = c- 12k(2k - 1)
d c- 1(2k - 2)(2k - 3)
d Á c- 14(3)d c- 1
2dc0
c2k = - 12k(2k - 1)
c2k - 2.
2k(2k - 1)c2k + c2k - 2 = 0
x2k - 2n = 2k
n = 2k + 1n = 2k, k = 1, 2, 3, Á
16.5 Power-Series Solutions 16-27
5122_web_ch16.qxd 3/16/06 2:31 PM Page 16-27
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiEXAMPLE 2 Find the general solution to .
Solution We assume the series solution form
and calculate the derivatives
and .
Substitution of these forms into the second-order equation yields
.
We equate the coefficients of each power of x to zero as summarized in the following table.
Power of x Coefficient Equation
or
or
or
or
or
or
From the table notice that the coefficients with even indices are interrelated and the coeffi-cients with odd indices are also interrelated.
Even indices: Here so the power is From the last line in the table,we have
From this recurrence relation we obtain
Odd indices: Here so the power is From the last line in the table,we have
From this recurrence relation we obtain
=(-1)k
(3)(5) Á (2k + 1) c1.
c2k + 1 = a- 12k + 1
b a- 12k - 1
b Á a- 15 b a- 1
3bc1
c2k + 1 = - 12k + 1
c2k - 1.
x2k - 1.n = 2k - 1,
=(-1)k
(2)(4)(6) Á (2k) c0.
c2k = a- 12kb a- 1
2k - 2b Á a- 1
6b a- 1
4b a- 1
2bc0
c2k = - 12k
c2k - 2.
x2k - 2.n = 2k - 2,
cn + 2 = - 1n + 2
cn(n + 2)(n + 1)cn + 2 + (n + 1)cn = 0xn
oooc6 = -1
6 c46(5)c6 + 4c4 + c4 = 0x4
c5 = -15 c35(4)c5 + 3c3 + c3 = 0x3
c4 = -14 c24(3)c4 + 2c2 + c2 = 0x2
c3 = -13 c13(2)c3 + c1 + c1 = 0x1
c2 = -12 c02(1)c2 + c0 = 0x0
aq
n = 2 n(n - 1)cn xn - 2 + a
q
n = 1 ncn xn + a
q
n = 0 cnxn = 0
y– = aq
n = 2n(n - 1)cnxn - 2y¿ = a
q
n = 1 ncn xn - 1
y = aq
n = 0 cn xn
y– + xy¿ + y = 0
16-28 Chapter 16: Second-Order Differential Equations
5122_web_ch16.qxd 3/16/06 2:31 PM Page 16-28
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWriting the power series by grouping its even and odd powers and substituting for thecoefficients yields
EXAMPLE 3 Find the general solution to
Solution Notice that the leading coefficient is zero when Thus, we assume thesolution interval Substitution of the series form
and its derivatives gives us
Next, we equate the coefficients of each power of x to zero as summarized in the followingtable.
Power of x Coefficient Equation
or
or
or
or
or
Again we notice that the coefficients with even indices are interrelated and those with oddindices are interrelated.
Even indices: Here so the power is From the right-hand column andlast line of the table, we get
= (k + 1)c0.
= a2k + 22k
b a 2k2k - 2
b a2k - 22k - 4
b Á 64a4
2bc0
c2k = 2k + 22k
c2k - 2
x2k.n = 2k - 2,
cn + 2 = n + 4n + 2
cn(n + 2)(n + 1)cn + 2 - (n + 4)(n + 1)cn = 0
(n + 2)(n + 1)cn + 2 - [n(n - 1) + 6n + 4]cn = 0xn
oooc5 = 7
5 c35(4)c5 - 3(2)c3 - 6(3)c3 - 4c3 = 0x3
c4 = 64 c24(3)c4 - 2(1)c2 - 6(2)c2 - 4c2 = 0x2
c3 = 53 c13(2)c3 - 6(1)c1 - 4c1 = 0x1
c2 = 42 c02(1)c2 - 4c0 = 0x0
aq
n = 2 n(n - 1)cn xn - 2 - a
q
n = 2 n(n - 1)cn xn - 6a
q
n = 1 ncn xn - 4a
q
n = 0 cn xn = 0.
(1 - x2)aq
n = 2 n(n - 1)cn xn - 2 - 6a
q
n = 1 ncn xn - 4a
q
n = 0 cn xn = 0,
y = aq
n = 0 cn xn
I: -1 6 x 6 1.x = ;1.
|x| 6 1.(1 - x2)y– - 6xy¿ - 4y = 0,
= c0aq
k = 0
(-1)k
(2)(4) Á (2k)x2k + c1a
q
k = 0
(-1)k
(3)(5) Á (2k + 1)x2k + 1.
y = aq
k = 0 c2k x2k + a
q
k = 0 c2k + 1x2k + 1
16.5 Power-Series Solutions 16-29
5122_web_ch16.qxd 3/16/06 2:31 PM Page 16-29
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiOdd indices: Here so the power is The right-hand column and lastline of the table gives us
The general solution is
EXAMPLE 4 Find the general solution to
Solution Assuming that
substitution into the differential equation gives us
We next determine the coefficients, listing them in the following table.
Power of x Coefficient Equation
or
or
or
or
or
or cn + 2 = 2n - 1(n + 2)(n + 1)
cn(n + 2)(n + 1)cn + 2 - (2n - 1)cn = 0xn
ooo
c6 = 76 # 5
c46(5)c6 - 8c4 + c4 = 0x4
c5 = 55 # 4
c35(4)c5 - 6c3 + c3 = 0x3
c4 = 34 # 3
c24(3)c4 - 4c2 + c2 = 0x2
c3 = 13 # 2
c13(2)c3 - 2c1 + c1 = 0x1
c2 = - 12
c02(1)c2 + c0 = 0x0
aq
n = 2 n(n - 1)cn xn - 2 - 2a
q
n = 1 ncn xn + a
q
n = 0 cn xn = 0.
y = aq
n = 0 cn xn,
y– - 2xy¿ + y = 0.
= c0aq
k = 0 (k + 1)x2k + c1a
q
k = 0 2k + 3
3x2k + 1.
= aq
k = 0 c2k x2k + a
q
k = 0 c2k + 1x2k + 1
y = aq
n = 0 cn xn
= 2k + 33
c1.
= a2k + 32k + 1
b a2k + 12k - 1
b a2k - 12k - 3
b Á 75 a53 bc1
c2k + 1 = 2k + 32k + 1
c2k - 1
x2k + 1.n = 2k - 1,
16-30 Chapter 16: Second-Order Differential Equations
5122_web_ch16.qxd 3/16/06 2:31 PM Page 16-30
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiFrom the recursive relation
we write out the first few terms of each series for the general solution:
+ c1 ax + 13!
x3 + 55!
x5 + 457!
x7 + Á b .
y = c0 a1 - 12
x2 - 34!
x4 - 216!
x6 - Á b
cn + 2 = 2n - 1(n + 2)(n + 1)
cn,
16.5 Power-Series Solutions 16-31
EXERCISES 16.5
In Exercises 1–18, use power series to find the general solution of thedifferential equation.
1.
2.
3.
4.
5.
6.
7.
8. (1 - x2)y– - 4xy¿ + 6y = 0
(1 + x)y– - y = 0
y– - xy¿ + y = 0
x2y– - 2xy¿ + 2y = 0
y– - 3y¿ + 2y = 0
y– + 4y = 0
y– + 2y¿ + y = 0
y– + 2y¿ = 0
9.
10.
11.
12.
13.
14.
15.
16.
17.
18. x2y– - 4xy¿ + 6y = 0
y– - xy¿ + 3y = 0
(1 - x2)y– - xy¿ + 4y = 0
y– - 2xy¿ + 3y = 0
y– - 2xy¿ + 4y = 0
(x2 - 1)y– + 4xy¿ + 2y = 0
xy– - (x + 2)y¿ + 2y = 0
(x2 - 1)y– - 6y = 0
y– + y¿ - x2y = 0
(x2 - 1)y– + 2xy¿ - 2y = 0
5122_web_ch16.qxd 3/16/06 2:31 PM Page 16-31
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
AP-1
APPENDICES
Mathematical Induction
Many formulas, like
can be shown to hold for every positive integer n by applying an axiom called themathematical induction principle. A proof that uses this axiom is called a proof by mathe-matical induction or a proof by induction.
The steps in proving a formula by induction are the following:
1. Check that the formula holds for
2. Prove that if the formula holds for any positive integer then it also holds for thenext integer,
The induction axiom says that once these steps are completed, the formula holds for allpositive integers n. By Step 1 it holds for By Step 2 it holds for and there-fore by Step 2 also for and by Step 2 again for and so on. If the first dominofalls, and the kth domino always knocks over the when it falls, all the dominoesfall.
From another point of view, suppose we have a sequence of statements one for each positive integer. Suppose we can show that assuming any one
of the statements to be true implies that the next statement in line is true. Suppose that wecan also show that is true. Then we may conclude that the statements are true from on.
EXAMPLE 1 Use mathematical induction to prove that for every positive integer n,
Solution We accomplish the proof by carrying out the two steps above.
1. The formula holds for because
1 =
1s1 + 1d2
.
n = 1
1 + 2 +Á
+ n =
nsn + 1d2
.
S1S1
S2, Á , Sn, Á ,S1,
sk + 1dstn = 4,n = 3,
n = 2,n = 1.
n = k + 1.n = k,
n = 1.
1 + 2 +Á
+ n =
nsn + 1d2
,
A.1
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 1
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi2. If the formula holds for does it also hold for The answer is yes, aswe now show. If
then
The last expression in this string of equalities is the expression for
The mathematical induction principle now guarantees the original formula for allpositive integers n.
In Example 4 of Section 5.2 we gave another proof for the formula giving the sum ofthe first n integers. However, proof by mathematical induction is more general. It can beused to find the sums of the squares and cubes of the first n integers (Exercises 9 and 10).Here is another example.
EXAMPLE 2 Show by mathematical induction that for all positive integers n,
Solution We accomplish the proof by carrying out the two steps of mathematicalinduction.
1. The formula holds for because
2. If
then
Thus, the original formula holds for whenever it holds for With these steps verified, the mathematical induction principle now guarantees the
formula for every positive integer n.
Other Starting Integers
Instead of starting at some induction arguments start at another integer. The stepsfor such an argument are as follows.
n = 1
n = k .n = sk + 1d
= 1 -2
2k + 1 +1
2k + 1 = 1 -1
2k + 1 .
121 +
122 +
Á+
12k +
12k + 1 = 1 -
12k +
12k + 1 = 1 -
1 # 22k # 2
+1
2k + 1
121 +
122 +
Á+
12k = 1 -
12k ,
121 = 1 -
121 .
n = 1
121 +
122 +
Á+
12n = 1 -
12n.
n = sk + 1d.nsn + 1d>2
=
sk + 1dsk + 2d2
=
sk + 1dssk + 1d + 1d2
.
1 + 2 +Á
+ k + sk + 1d =
ksk + 1d2
+ sk + 1d =
k2+ k + 2k + 2
2
1 + 2 +Á
+ k =
ksk + 1d2
,
n = k + 1?n = k,
AP-2 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 2
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
A.1 Mathematical Induction AP-3
EXERCISES A.1
1. Assuming that the triangle inequality holdsfor any two numbers a and b, show that
for any n numbers.
2. Show that if then
for every positive integer n.
3. Use the Product Rule, and the fact that
to show that for every positive
integer n.
4. Suppose that a function ƒ(x) has the property that for any two positive numbers and Show that
for the product of any n positive numbers x1, x2 Á , xn .
ƒsx1 x2Á xnd = ƒsx1d + ƒsx2d +
Á+ ƒsxnd
x2 .x1ƒsx1d + ƒsx2dƒsx1 x2d =
ddx
sxnd = nxn - 1ddx
sxd = 1
ddx
suyd = u dydx
+ y dudx
,
1 + r + r2+
Á+ rn
=
1 - rn + 1
1 - r
r Z 1,
ƒ x1 + x2 +Á
+ xn ƒ … ƒ x1 ƒ + ƒ x2 ƒ +Á
+ ƒ xn ƒ
ƒ a + b ƒ … ƒ a ƒ + ƒ b ƒ 5. Show that
for all positive integers n.
6. Show that if n is large enough.
7. Show that if n is large enough.
8. Show that for
9. Sums of squares Show that the sum of the squares of the first npositive integers is
10. Sums of cubes Show that the sum of the cubes of the first npositive integers is
11. Rules for finite sums Show that the following finite sum ruleshold for every positive integer n.
a. an
k = 1sak + bkd = a
n
k = 1 ak + a
n
k = 1 bk
snsn + 1d>2d2 .
n an +
12b sn + 1d
3.
n Ú -3.2nÚ 1>8
2n7 n2
n! 7 n3
231 +
232 +
Á+
23n = 1 -
13n
1. Check that the formula holds for (the first appropriate integer).
2. Prove that if the formula holds for any integer then it also holds for
Once these steps are completed, the mathematical induction principle guarantees the for-mula for all
EXAMPLE 3 Show that if n is large enough.
Solution How large is large enough? We experiment:
n 1 2 3 4 5 6 7
n! 1 2 6 24 120 720 5040
3 9 27 81 243 729 2187
It looks as if for To be sure, we apply mathematical induction. We takein Step 1 and complete Step 2.
Suppose for some Then
Thus, for
The mathematical induction principle now guarantees for all n Ú 7.n! Ú 3n
k! 7 3k implies sk + 1d! 7 3k + 1.
k Ú 7,
sk + 1d! = sk + 1dsk!d 7 sk + 1d3k7 7 # 3k
7 3k + 1.
k Ú 7.k! 7 3kn1 = 7
n Ú 7.n! 7 3n
3n
n! 7 3n
n Ú n1.
n = sk + 1d.n = k Ú n1,
n = n1
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 3
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufib.
c. (Any number c)an
k = 1 cak = c # a
n
k = 1 ak
an
k = 1sak - bkd = a
n
k = 1 ak - a
n
k = 1 bk d. (if has the constant value c)
12. Show that for every positive integer n and every realnumber x.
ƒ xnƒ = ƒ x ƒ
n
akan
k = 1 ak = n # c
AP-4 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 4
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hass
an Riaz Yousufi
AP-4 Appendices
Proofs of Limit Theorems
This appendix proves Theorem 1, Parts 2–5, and Theorem 4 from Section 2.2.
A.2
THEOREM 1 Limit LawsIf L, M, c, and k are real numbers and
1. Sum Rule:
2. Difference Rule:
3. Product Rule:
4. Constant Multiple Rule:
5. Quotient Rule:
6. Power Rule: If r and s are integers with no common factorand then
provided that is a real number. (If s is even,we assume that )L 7 0.
Lr>slimx:cAƒ(x) B r>s = Lr>s
s Z 0,
limx:c
ƒsxdgsxd
=LM
, if M Z 0
limx:c
Akƒsxd B = kL sany number kd
limx:c
Aƒsxd # gsxd B = L # M
limx:c
Aƒsxd - gsxd B = L - M
limx:c
Aƒsxd + gsxd B = L + M
limx:c
ƒsxd = L and limx:c
gsxd = M, then
We proved the Sum Rule in Section 2.3 and the Power Rule is proved in more ad-vanced texts. We obtain the Difference Rule by replacing and inthe Sum Rule. The Constant Multiple Rule is the special case of the ProductRule. This leaves only the Product and Quotient Rules.
Proof of the Limit Product Rule We show that for any there exists a suchthat for all x in the intersection D of the domains of ƒ and g,
Suppose then that is a positive number, and write ƒ(x) and g(x) as
ƒsxd = L + sƒsxd - Ld, gsxd = M + sgsxd - Md .
P
0 6 ƒ x - c ƒ 6 d Q ƒ ƒsxdgsxd - LM ƒ 6 P .
d 7 0P 7 0
gsxd = kM by -Mgsxd by -gsxd
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 4
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiMultiply these expressions together and subtract LM:
(1)
Since ƒ and g have limits L and M as there exist positive numbers and such that for all x in D
(2)
If we take to be the smallest numbers through the inequalities on the right-handside of the Implications (2) will hold simultaneously for Therefore, forall x in implies
This completes the proof of the Limit Product Rule.
Proof of the Limit Quotient Rule We show that We can thenconclude that
by the Limit Product Rule.Let be given. To show that we need to show that there
exists a such that for all x.
Since there exists a positive number such that for all x
(3)
For any numbers A and B it can be shown that from which it follows that With and
this becomes
ƒ ƒ gsxd ƒ - ƒ M ƒ ƒ … ƒ gsxd - M ƒ ,
B = M,A = gsxdƒ ƒ A ƒ - ƒ B ƒ ƒ … ƒ A - B ƒ .ƒ A - B ƒ ,ƒ B ƒ - ƒ A ƒ …ƒ A ƒ - ƒ B ƒ … ƒ A - B ƒ and
0 6 ƒ x - c ƒ 6 d1 Q ƒ gsxd - M ƒ 6M2
.
d1ƒ M ƒ 7 0,
0 6 ƒ x - c ƒ 6 d Q ` 1gsxd
-1M` 6 P.
d 7 0lim x:c s1>gsxdd = 1>M,P 7 0
limx:c
ƒsxdgsxd
= limx:caƒsxd # 1
gsxdb = lim
x:c ƒsxd # lim
x:c
1g(x)
= L # 1M
=LM
lim x:c s1>gsxdd = 1>M.
6P
3+
P
3+ AP
3AP
3= P .
… s1 + ƒ L ƒ d ƒ gsxd - M ƒ + s1 + ƒ M ƒ d ƒ ƒsxd - L ƒ + ƒ ƒsxd - L ƒ ƒ gsxd - M ƒ
… ƒ L ƒ ƒ gsxd - M ƒ + ƒ M ƒ ƒ ƒsxd - L ƒ + ƒ ƒsxd - L ƒ ƒ gsxd - M ƒ
ƒ ƒsxd # gsxd - LM ƒ
D, 0 6 ƒ x - c ƒ 6 d
0 6 ƒ x - c ƒ 6 d.d4,d1d
0 6 ƒ x - c ƒ 6 d4 Q ƒ gsxd - M ƒ 6 P>s3s1 + ƒ L ƒ dd
0 6 ƒ x - c ƒ 6 d3 Q ƒ ƒsxd - L ƒ 6 P>s3s1 + ƒ M ƒ dd
0 6 ƒ x - c ƒ 6 d2 Q ƒ gsxd - M ƒ 6 2P>3 0 6 ƒ x - c ƒ 6 d1 Q ƒ ƒsxd - L ƒ 6 2P>3
d4d1, d2, d3,x : c,
= Lsgsxd - Md + Msƒsxd - Ld + sƒsxd - Ldsgsxd - Md .
+ sƒsxd - Ldsgsxd - Md - LM
= LM + Lsgsxd - Md + Msƒsxd - Ld
ƒsxd # gsxd - LM = sL + sƒsxd - LddsM + sgsxd - Mdd - LM
A.2 Proofs of Limit Theorems AP-5
Triangle inequalityapplied to Equation (1)
Values from (2)
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 5
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwhich can be combined with the inequality on the right in Implication (3) to get, in turn,
(4)
Therefore, implies that
(5)
Since there exists a number such that for all x
(6)
If we take to be the smaller of and the conclusions in (5) and (6) both hold for all xsuch that Combining these conclusions gives
This concludes the proof of the Limit Quotient Rule.
0 6 ƒ x - c ƒ 6 d Q ` 1gsxd
-1M` 6 P.
0 6 ƒ x - c ƒ 6 d.d2,d1d
0 6 ƒ x - c ƒ 6 d2 Q ƒ M - gsxd ƒ 6P
2 ƒ M ƒ
2.
d2 7 0s1>2d ƒ M ƒ2P 7 0,
61
ƒ M ƒ
# 2
ƒ M ƒ
# ƒ M - gsxd ƒ .
1
gsxd-
1M` = `M - gsxd
Mgsxd` …
1ƒ M ƒ
# 1ƒ gsxd ƒ
#ƒ M - gsxd ƒ
0 6 ƒ x - c ƒ 6 d1
1
ƒ gsxd ƒ
62
ƒ M ƒ
6
3ƒ gsxd ƒ
ƒ M ƒ 6 2 ƒ gsxd ƒ 6 3 ƒ M ƒ
ƒ M ƒ
26 ƒ gsxd ƒ 6
3 ƒ M ƒ
2
-ƒ M ƒ
26 ƒ gsxd ƒ - ƒ M ƒ 6
ƒ M ƒ
2
ƒ ƒ gsxd ƒ - ƒ M ƒ ƒ 6
ƒ M ƒ
2
AP-6 Appendices
Inequality (4)
THEOREM 4 The Sandwich TheoremSuppose that for all x in some open interval I containing c,except possibly at itself. Suppose also that
Then lim x:c ƒsxd = L .L .
lim x:c gsxd = lim
x:c hsxd =x = cgsxd … ƒsxd … hsxd
Proof for Right-Hand Limits Suppose Then for anythere exists a such that for all x the interval is contained in I
and the inequality implies
These inequalities combine with the inequality to give
Therefore, for all x, the inequality implies ƒ ƒsxd - L ƒ 6 P .c 6 x 6 c + d
- P 6 ƒsxd - L 6 P .
L - P 6 ƒsxd 6 L + P,
L - P 6 gsxd … ƒsxd … hsxd 6 L + P,
gsxd … ƒsxd … hsxd
L - P 6 gsxd 6 L + P and L - P 6 hsxd 6 L + P.
c 6 x 6 c + dd 7 0P 7 0lim x:c+ gsxd = lim
x:c+ hsxd = L .
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 6
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiProof for Left-Hand Limits Suppose Then for anythere exists a such that for all x the interval is contained in I
and the inequality implies
We conclude as before that for all implies
Proof for Two-Sided Limits If then g(x) and h(x) bothapproach L as and as so and Hence
exists and equals L.lim x:c ƒsxd
lim x:c- ƒsxd = L .lim
x:c+ ƒsxd = Lx : c- ;x : c+
lim x:c gsxd = lim
x:c hsxd = L ,
ƒ ƒsxd - L ƒ 6 P.x, c - d 6 x 6 c
L - P 6 gsxd 6 L + P and L - P 6 hsxd 6 L + P.
c - d 6 x 6 cd 7 0P 7 0lim x:c- gsxd = lim
x:c- hsxd = L .
AP-7
EXERCISES A.2
1. Suppose that functions and have limits and respectively, as Show that their sum has limit
Use mathematical induction (Appendix 1) togeneralize this result to the sum of any finite number of functions.
2. Use mathematical induction and the Limit Product Rule inTheorem 1 to show that if functions havelimits as then
3. Use the fact that and the result of Exercise 2 toshow that for any integer
4. Limits of polynomials Use the fact that for anynumber k together with the results of Exercises 1 and 3 to showthat for any polynomial function
ƒsxd = an xn+ an-1 xn - 1
+Á
+ a1 x + a0 .
lim x:c ƒsxd = ƒscd
lim x:cskd = k
n 7 1.lim x:c xn
= cnlim x:c x = c
limx:c
ƒ1sxdƒ2sxd # Á # ƒnsxd = L1# L2
# Á # Ln .
x : c ,L1, L2, Á , Ln
ƒ1sxd, ƒ2sxd, Á , ƒnsxd
L1 + L2 + L3 .x : c .L3 ,
L1, L2 ,ƒ3sxdƒ1sxd, ƒ2sxd, 5. Limits of rational functions Use Theorem 1 and the result ofExercise 4 to show that if ƒ(x) and g(x) are polynomial functionsand then
6. Composites of continuous functions Figure A.1 gives thediagram for a proof that the composite of two continuous func-tions is continuous. Reconstruct the proof from the diagram. Thestatement to be proved is this: If ƒ is continuous at and g iscontinuous at ƒ(c), then is continuous at c.
Assume that c is an interior point of the domain of ƒ and thatƒ(c) is an interior point of the domain of g. This will make thelimits involved two-sided. (The arguments for the cases that in-volve one-sided limits are similar.)
g � ƒx = c
limx:c
ƒsxdgsxd
=
ƒscdgscd
.
gscd Z 0,
c f(c) g( f(c))
�f �f �g �g � �
f g
g � f
FIGURE A.1 The diagram for a proof that the composite of two continuous functionsis continuous.
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 7
A.2 Proofs of Limit Theorems
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz YousufiA.3 Commonly Occurring Limits AP-7
Commonly Occurring Limits
This appendix verifies limits (4)–(6) in Theorem 5 of Section 11.1.
Limit 4: If We need to show that to each there corres-
ponds an integer N so large that for all n greater than N. Since whileP1>n : 1,ƒ xn
ƒ 6 P
P 7 0limn: ˆ
xn= 0ƒ x ƒ 6 1,
A.3
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 7
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufithere exists an integer N for which In other words,
(1)
This is the integer we seek because, if then
(2)
Combining (1) and (2) produces for all concluding the proof.
Limit 5: For any number Let
Then
as we can see by the following application of l’Hôpital’s Rule, in which we differentiatewith respect to n:
Apply Theorem 4, Section 11.1, with to conclude that
Limit 6: For any number Since
all we need to show is that We can then apply the Sandwich Theorem forSequences (Section 11.1, Theorem 2) to conclude that
The first step in showing that is to choose an integer so thatBy Limit 4, just proved, we then have We then restrict our
attention to values of For these values of n, we can write
…
ƒ x ƒn
M!M n - M =
ƒ x ƒnM M
M!M n =M M
M! a ƒ x ƒ
Mbn
.
sn - Md factors('''''')''''''*
ƒ x ƒ
n
n!=
ƒ x ƒn
1 # 2 # Á # M # sM + 1dsM + 2d # Á # n
n 7 M .s ƒ x ƒ >Mdn : 0.s ƒ x ƒ >Md 6 1.
M 7 ƒ x ƒ ,ƒ x ƒn>n! : 0
xn>n! : 0.ƒ x ƒ
n>n! : 0.
-
ƒ x ƒn
n!…
x n
n!…
ƒ x ƒn
n!,
xn
n!= 0x, lim
n: ˆ
a1 +
xn b
n
= an = e ln an : ex .
ƒsxd = ex
= limn: q
a 11 + x>n b # a- x
n2 b-1>n2 = lim
n: q
x
1 + x>n = x .
limn: q
n ln a1 +
xn b = lim
n: q
lns1 + x>nd
1>n
ln an = ln a1 +
xn b
n
= n ln a1 +
xn b : x ,
an = a1 +
xn b
n
.
A1 +xn Bn = exx, lim
n: ˆ
n 7 N ,ƒ xnƒ 6 P
ƒ xnƒ 6 ƒ xN
ƒ for all n 7 N .
ƒ x ƒ 6 1,
ƒ xNƒ = ƒ x ƒ
N6 P .
P1>N
7 ƒ x ƒ .ƒ x ƒ 6 1,
AP-8 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:49 AM Page 8
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThus,
Now, the constant does not change as n increases. Thus the Sandwich Theoremtells us that because s ƒ x ƒ >Mdn : 0.ƒ x ƒ
n>n! : 0MM>M!
0 …
ƒ x ƒn
n!…
MM
M! a ƒ x ƒ
Mbn
.
AP-9
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 9
A.3 Commonly Occurring Limits
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hass
an Riaz Yousufi
A.4 Theory of the Real Numbers AP-9
Theory of the Real Numbers
A rigorous development of calculus is based on properties of the real numbers. Manyresults about functions, derivatives, and integrals would be false if stated for functionsdefined only on the rational numbers. In this appendix we briefly examine some basic con-cepts of the theory of the reals that hint at what might be learned in a deeper, more theoret-ical study of calculus.
Three types of properties make the real numbers what they are. These are thealgebraic, order, and completeness properties. The algebraic properties involve additionand multiplication, subtraction and division. They apply to rational or complex numbers aswell as to the reals.
The structure of numbers is built around a set with addition and multiplication opera-tions. The following properties are required of addition and multiplication.
A1 for all a, b, c.
A2 for all a, b, c.
A3 There is a number called “0” such that for all a.
A4 For each number a, there is a b such that
M1 for all a, b, c.
M2 for all a, b.
M3 There is a number called “1” such that for all a.
M4 For each nonzero a, there is a b such that
D for all a, b, c.
A1 and M1 are associative laws, A2 and M2 are commutativity laws, A3 and M3 areidentity laws, and D is the distributive law. Sets that have these algebraic properties areexamples of fields, and are studied in depth in the area of theoretical mathematics calledabstract algebra.
The order properties allow us to compare the size of any two numbers. The orderproperties are
O1 For any a and b, either or or both.
O2 If and then
O3 If and then
O4 If then
O5 If and then
O3 is the transitivity law, and O4 and O5 relate ordering to addition and multiplication.
ac … bc .0 … ca … b
a + c … b + c .a … b
a … c .b … ca … b
a = b .b … aa … b
b … aa … b
asb + cd = ab + bc
ab = 1.
a # 1 = a
ab = ba
a(bc) = (ab)c
a + b = 0.
a + 0 = a
a + b = b + a
a + sb + cd = sa + bd + c
A.4
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 9
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWe can order the reals, the integers, and the rational numbers, but we cannot order thecomplex numbers (see Appendix A.5). There is no reasonable way to decide whether anumber like is bigger or smaller than zero. A field in which the size of any twoelements can be compared as above is called an ordered field. Both the rational numbersand the real numbers are ordered fields, and there are many others.
We can think of real numbers geometrically, lining them up as points on a line. Thecompleteness property says that the real numbers correspond to all points on the line,with no “holes” or “gaps.” The rationals, in contrast, omit points such as and andthe integers even leave out fractions like 1 2. The reals, having the completeness property,omit no points.
What exactly do we mean by this vague idea of missing holes? To answer this we mustgive a more precise description of completeness. A number M is an upper bound for a setof numbers if all numbers in the set are smaller than or equal to M. M is a least upperbound if it is the smallest upper bound. For example, is an upper bound for thenegative numbers. So is showing that 2 is not a least upper bound. The least upperbound for the set of negative numbers is We define a complete ordered field to beone in which every nonempty set bounded above has a least upper bound.
If we work with just the rational numbers, the set of numbers less than isbounded, but it does not have a rational least upper bound, since any rational upper boundM can be replaced by a slightly smaller rational number that is still larger than So therationals are not complete. In the real numbers, a set that is bounded above always has aleast upper bound. The reals are a complete ordered field.
The completeness property is at the heart of many results in calculus. One exampleoccurs when searching for a maximum value for a function on a closed interval [a, b], as inSection 4.1. The function has a maximum value on [0, 1] at the point x satis-fying or If we limited our consideration to functions definedonly on rational numbers, we would have to conclude that the function has no maximum,since is irrational (Figure A.2). The Extreme Value Theorem (Section 4.1), whichimplies that continuous functions on closed intervals [a, b] have a maximum value, is nottrue for functions defined only on the rationals.
The Intermediate Value Theorem implies that a continuous function ƒ on an interval[a, b] with and must be zero somewhere in [a, b]. The function valuescannot jump from negative to positive without there being some point x in [a, b] where
The Intermediate Value Theorem also relies on the completeness of the realnumbers and is false for continuous functions defined only on the rationals. The function
has and but if we consider ƒ only on the rationalnumbers, it never equals zero. The only value of x for which is anirrational number.
We have captured the desired properties of the reals by saying that the real numbers area complete ordered field. But we’re not quite finished. Greek mathematicians in the schoolof Pythagoras tried to impose another property on the numbers of the real line, the condi-tion that all numbers are ratios of integers. They learned that their effort was doomed whenthey discovered irrational numbers such as How do we know that our efforts to specifythe real numbers are not also flawed, for some unseen reason? The artist Escher drew opti-cal illusions of spiral staircases that went up and up until they rejoined themselves at thebottom. An engineer trying to build such a staircase would find that no structure realizedthe plans the architect had drawn. Could it be that our design for the reals contains somesubtle contradiction, and that no construction of such a number system can be made?
We resolve this issue by giving a specific description of the real numbers and verify-ing that the algebraic, order, and completeness properties are satisfied in this model. This
12.
x = 21>3,ƒsxd = 0ƒs1d = 2,ƒs0d = -1ƒsxd = 3x2
- 1
ƒsxd = 0.
ƒsbd 7 0ƒsad 6 0
11>3x = 11>3.1 - 3x2
= 0,y = x - x3
22.
22
M = 0.M = 1,
M = 2
> p ,22
i = 2-1
AP-10 Appendices
0.1 0.3 0.5 0.7 0.9 1
0.1
0.3
0.5
�1/3
y � x � x3
y
x
FIGURE A.2 The maximum value ofon [0, 1] occurs at the
irrational number x = 21>3.y = x - x3
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 10
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiis called a construction of the reals, and just as stairs can be built with wood, stone, orsteel, there are several approaches to constructing the reals. One construction treats thereals as all the infinite decimals,
In this approach a real number is an integer a followed by a sequence of decimal digitseach between 0 and 9. This sequence may stop, or repeat in a periodic
pattern, or keep going forever with no pattern. In this form, andrepresent three familiar real numbers. The real meaning of the dots
following these digits requires development of the theory of sequences and series,as in Chapter 11. Each real number is constructed as the limit of a sequence of rationalnumbers given by its finite decimal approximations. An infinite decimal is then the sameas a series
This decimal construction of the real numbers is not entirely straightforward. It’seasy enough to check that it gives numbers that satisfy the completeness and order prop-erties, but verifying the algebraic properties is rather involved. Even adding or multiply-ing two numbers requires an infinite number of operations. Making sense of divisionrequires a careful argument involving limits of rational approximations to infinitedecimals.
A different approach was taken by Richard Dedekind (1831–1916), a German mathe-matician, who gave the first rigorous construction of the real numbers in 1872. Given anyreal number x, we can divide the rational numbers into two sets: those less than or equal tox and those greater. Dedekind cleverly reversed this reasoning and defined a real numberto be a division of the rational numbers into two such sets. This seems like a strangeapproach, but such indirect methods of constructing new structures from old are commonin theoretical mathematics.
These and other approaches (see Appendix A.5) can be used to construct a system ofnumbers having the desired algebraic, order, and completeness properties. A final issue thatarises is whether all the constructions give the same thing. Is it possible that different con-structions result in different number systems satisfying all the required properties? If yes,which of these is the real numbers? Fortunately, the answer turns out to be no. The reals arethe only number system satisfying the algebraic, order, and completeness properties.
Confusion about the nature of real numbers and about limits caused considerable con-troversy in the early development of calculus. Calculus pioneers such as Newton, Leibniz,and their successors, when looking at what happens to the difference quotient
as each of and approach zero, talked about the resulting derivative being a quotientof two infinitely small quantities. These “infinitesimals,” written dx and dy, were thoughtto be some new kind of number, smaller than any fixed number but not zero. Similarly, adefinite integral was thought of as a sum of an infinite number of infinitesimals
as x varied over a closed interval. While the approximating difference quotients were understood much as today, it was the quotient of infinitesimal quantities, rather than
¢y>¢x
ƒsxd # dx
¢x¢y
¢y
¢x=
ƒsx + ¢xd - ƒsxd¢x
a +
d1
10+
d2
100+
Á .
“ Á ”3.1415926535898 Á
2.00, 0.3333333 Á
d1, d2, d3, Á ,
a.d1d2d3d4 Á
A.4 Theory of the Real Numbers AP-11
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 11
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufia limit, that was thought to encapsulate the meaning of the derivative. This way of thinkingled to logical difficulties, as attempted definitions and manipulations of infinitesimals raninto contradictions and inconsistencies. The more concrete and computable differencequotients did not cause such trouble, but they were thought of merely as useful calculationtools. Difference quotients were used to work out the numerical value of the derivative andto derive general formulas for calculation, but were not considered to be at the heart of thequestion of what the derivative actually was. Today we realize that the logical problems as-sociated with infinitesimals can be avoided by defining the derivative to be the limit of itsapproximating difference quotients. The ambiguities of the old approach are no longerpresent, and in the standard theory of calculus, infinitesimals are neither needed nor used.
AP-12 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 12
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufiAP-12 Appendices
Complex Numbers
Complex numbers are expressions of the form where a and b are real numbers andi is a symbol for Unfortunately, the words “real” and “imaginary” have connotationsthat somehow place in a less favorable position in our minds than As a matter offact, a good deal of imagination, in the sense of inventiveness, has been required to con-struct the real number system, which forms the basis of the calculus (see Appendix A.4). Inthis appendix we review the various stages of this invention. The further invention of acomplex number system is then presented.
The Development of the Real Numbers
The earliest stage of number development was the recognition of the counting numberswhich we now call the natural numbers or the positive integers. Certain
simple arithmetical operations can be performed with these numbers without getting out-side the system. That is, the system of positive integers is closed under the operations ofaddition and multiplication. By this we mean that if m and n are any positive integers,then
(1)
are also positive integers. Given the two positive integers on the left side of either equationin (1), we can find the corresponding positive integer on the right side. More than this, wecan sometimes specify the positive integers m and p and find a positive integer n such that
For instance, can be solved when the only numbers we know arethe positive integers. But the equation cannot be solved unless the numbersystem is enlarged.
The number zero and the negative integers were invented to solve equations likeIn a civilization that recognizes all the integers
(2)
an educated person can always find the missing integer that solves the equationwhen given the other two integers in the equation.
Suppose our educated people also know how to multiply any two of the integers inthe list (2). If, in Equations (1), they are given m and q, they discover that sometimesthey can find n and sometimes they cannot. Using their imagination, they may be
m + n = p
Á , -3, -2, -1, 0, 1, 2, 3, Á ,
7 + n = 3.
7 + n = 33 + n = 7m + n = p .
m + n = p and mn = q
1, 2, 3, Á ,
12.1-11-1.
a + ib ,
A.5
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 12
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiinspired to invent still more numbers and introduce fractions, which are just orderedpairs m n of integers m and n. The number zero has special properties that may botherthem for a while, but they ultimately discover that it is handy to have all ratios of inte-gers m n, excluding only those having zero in the denominator. This system, called theset of rational numbers, is now rich enough for them to perform the rational opera-tions of arithmetic:
1. (a) addition 2. (a) multiplication(b) subtraction (b) division
on any two numbers in the system, except that they cannot divide by zero because it ismeaningless.
The geometry of the unit square (Figure A.3) and the Pythagorean theorem showedthat they could construct a geometric line segment that, in terms of some basic unit oflength, has length equal to Thus they could solve the equation
by a geometric construction. But then they discovered that the line segment representingis an incommensurable quantity. This means that cannot be expressed as the ratio
of two integer multiples of some unit of length. That is, our educated people could not finda rational number solution of the equation
There is no rational number whose square is 2. To see why, suppose that there weresuch a rational number. Then we could find integers p and q with no common factor otherthan 1, and such that
(3)
Since p and q are integers, p must be even; otherwise its product with itself would be odd.In symbols, where is an integer. This leads to which says q must beeven, say where is an integer. This makes 2 a factor of both p and q, contraryto our choice of p and q as integers with no common factor other than 1. Hence there is norational number whose square is 2.
Although our educated people could not find a rational solution of the equationthey could get a sequence of rational numbers
(4)
whose squares form a sequence
(5)
that converges to 2 as its limit. This time their imagination suggested that they neededthe concept of a limit of a sequence of rational numbers. If we accept the fact that anincreasing sequence that is bounded from above always approaches a limit (Theorem 6,Section 11.1) and observe that the sequence in (4) has these properties, then we want itto have a limit L. This would also mean, from (5), that and hence L is not oneof our rational numbers. If to the rational numbers we further add the limits of allbounded increasing sequences of rational numbers, we arrive at the system of all “real”numbers. The word real is placed in quotes because there is nothing that is either “morereal” or “less real” about this system than there is about any other mathematicalsystem.
L2= 2,
11
, 4925
, 1681841
, 57,12128,561
, Á ,
11
, 75, 41
29, 239
169, Á ,
x2= 2,
q1q = 2q1 ,2p1
2= q2p1p = 2p1 ,
p2= 2q2 .
x2= 2.
2222
x2= 2
22.
>>
A.5 Complex Numbers AP-13
1
1�2
FIGURE A.3 With a straightedge andcompass, it is possible to construct asegment of irrational length.
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 13
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiThe Complex Numbers
Imagination was called upon at many stages during the development of the real numbersystem. In fact, the art of invention was needed at least three times in constructing thesystems we have discussed so far:
1. The first invented system: the set of all integers as constructed from the countingnumbers.
2. The second invented system: the set of rational numbers m n as constructed from theintegers.
3. The third invented system: the set of all real numbers x as constructed from therational numbers.
These invented systems form a hierarchy in which each system contains the previoussystem. Each system is also richer than its predecessor in that it permits additional opera-tions to be performed without going outside the system:
1. In the system of all integers, we can solve all equations of the form
(6)
where a can be any integer.
2. In the system of all rational numbers, we can solve all equations of the form
(7)
provided a and b are rational numbers and
3. In the system of all real numbers, we can solve all of Equations (6) and (7) and, in ad-dition, all quadratic equations
(8)
You are probably familiar with the formula that gives the solutions of Equation (8),namely,
(9)
and are familiar with the further fact that when the discriminant, is negative,the solutions in Equation (9) do not belong to any of the systems discussed above. In fact,the very simple quadratic equation
is impossible to solve if the only number systems that can be used are the three inventedsystems mentioned so far.
Thus we come to the fourth invented system, the set of all complex numbersWe could dispense entirely with the symbol i and use the ordered pair notation
(a, b). Since, under algebraic operations, the numbers a and b are treated somewhat dif-ferently, it is essential to keep the order straight. We therefore might say that thecomplex number system consists of the set of all ordered pairs of real numbers (a, b),together with the rules by which they are to be equated, added, multiplied, and so on,listed below. We will use both the (a, b) notation and the notation in the discus-sion that follows. We call a the real part and b the imaginary part of the complexnumber (a, b).
a + ib
a + ib .
x2+ 1 = 0
b2- 4ac ,
x =
-b ; 2b2- 4ac
2a,
ax2+ bx + c = 0 having a Z 0 and b2
- 4ac Ú 0.
a Z 0.
ax + b = 0,
x + a = 0,
>
AP-14 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 14
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiWe make the following definitions.
EqualityTwo complex numbers (a, b)
if and only if and (c, d) are equal if and only and if and
AdditionThe sum of the two complexnumbers (a, b) and (c, d) is thecomplex number .
Multiplication
The product of two complexnumbers (a, b) and (c, d) is thecomplex number
The product of a real number cand the complex number (a, b) isthe complex number (ac, bc).
The set of all complex numbers (a, b) in which the second number b is zero has all theproperties of the set of real numbers a. For example, addition and multiplication of (a, 0)and (c, 0) give
which are numbers of the same type with imaginary part equal to zero. Also, if we multi-ply a “real number” (a, 0) and the complex number (c, d), we get
In particular, the complex number (0, 0) plays the role of zero in the complex numbersystem, and the complex number (1, 0) plays the role of unity or one.
The number pair (0, 1), which has real part equal to zero and imaginary part equal toone, has the property that its square,
has real part equal to minus one and imaginary part equal to zero. Therefore, in the systemof complex numbers (a, b) there is a number whose square can be added to
to produce that is,
The equation
therefore has a solution in this new number system.You are probably more familiar with the notation than you are with the nota-
tion (a, b). And since the laws of algebra for the ordered pairs enable us to write
while (1, 0) behaves like unity and (0, 1) behaves like a square root of minus one, we neednot hesitate to write in place of (a, b). The i associated with b is like a tracer elementa + ib
sa, bd = sa, 0d + s0, bd = as1, 0d + bs0, 1d ,
a + ibx = s0, 1d
x2+ 1 = 0
s0, 1d2+ s1, 0d = s0, 0d .
zero = s0, 0d ,unity = s1, 0dx = s0, 1d
s0, 1ds0, 1d = s -1, 0d ,
sa, 0d # sc, dd = sac, add = asc, dd .
sa, 0d # sc, 0d = sac, 0d,
sa, 0d + sc, 0d = sa + c, 0d,
csa + ibd = ac + isbcdsac - bd, ad + bcd .
= sac - bdd + isad + bcdsa + ibdsc + idd
sa + c, b + dd= sa + cd + isb + ddsa + ibd + sc + idd
b = d .a = cb = d .a = c
a + ib = c + id
A.5 Complex Numbers AP-15
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 15
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufithat tags the imaginary part of We can pass at will from the realm of ordered pairs(a, b) to the realm of expressions and conversely. But there is nothing less “real”about the symbol than there is about the symbol once we havelearned the laws of algebra in the complex number system of ordered pairs (a, b).
To reduce any rational combination of complex numbers to a single complex number,we apply the laws of elementary algebra, replacing wherever it appears by Ofcourse, we cannot divide by the complex number But if then we may carry out a division as follows:
The result is a complex number with
and since The number that is used as multiplier to clear the i from the denominator is
called the complex conjugate of It is customary to use (read “z bar”) to denotethe complex conjugate of z; thus
Multiplying the numerator and denominator of the fraction by the com-plex conjugate of the denominator will always replace the denominator by a real number.
EXAMPLE 1 Arithmetic Operations with Complex Numbers
(a)
(b)
(c)
(d)
Argand Diagrams
There are two geometric representations of the complex number
1. as the point P(x, y) in the xy-plane
2. as the vector from the origin to P.
In each representation, the x-axis is called the real axis and the y-axis is the imaginaryaxis. Both representations are Argand diagrams for (Figure A.4).
In terms of the polar coordinates of x and y, we have
x = r cos u, y = r sin u ,
x + iy
OP§
z = x + iy :
=
6 + 22i40
=
320
+1120
i
=
12 + 4i + 18i + 6i2
36 + 12i - 12i - 4i2
2 + 3i6 - 2i
=
2 + 3i6 - 2i
6 + 2i6 + 2i
= 12 - 4i + 18i - 6i 2= 12 + 14i + 6 = 18 + 14i
s2 + 3ids6 - 2id = s2ds6d + s2ds -2id + s3ids6d + s3ids -2ids2 + 3id - s6 - 2id = s2 - 6d + s3 - s -2ddi = -4 + 5i
s2 + 3id + s6 - 2id = s2 + 6d + s3 - 2di = 8 + i
sc + idd>sa + ibd
z = a + ib, z = a - ib .
za + ib .a - ib
a + ib = sa, bd Z s0, 0d .a2+ b2
Z 0,
x =
ac + bda2
+ b2 , y =
ad - bca2
+ b2 ,
x + iy
c + ida + ib
=
sc + iddsa - ibdsa + ibdsa - ibd
=
sac + bdd + isad - bcda2
+ b2 .
a + ib Z 0,s0, 0d = 0 + i0.-1.i2
s1, 0d = 1,s0, 1d = ia + ib ,
a + ib .
AP-16 Appendices
x
y
O
ry
x
P(x, y)
�
FIGURE A.4 This Argand diagramrepresents both as a pointP(x, y) and as a vector OP§ .
z = x + iy
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 16
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiand
(10)
We define the absolute value of a complex number to be the length r of a vectorfrom the origin to P(x, y). We denote the absolute value by vertical bars; thus,
If we always choose the polar coordinates r and so that r is nonnegative, then
The polar angle is called the argument of z and is written Of course, anyinteger multiple of may be added to to produce another appropriate angle.
The following equation gives a useful formula connecting a complex number z, itsconjugate and its absolute value namely,
Euler’s Formula
The identity
called Euler’s formula, enables us to rewrite Equation (10) as
This formula, in turn, leads to the following rules for calculating products, quotients, powers,and roots of complex numbers. It also leads to Argand diagrams for Since
is what we get from Equation (10) by taking we can say that isrepresented by a unit vector that makes an angle with the positive x-axis, as shown inFigure A.5.
u
eiur = 1,cos u + i sin u
eiu .
z = reiu .
eiu= cos u + i sin u ,
z # z = ƒ z ƒ2 .
ƒ z ƒ ,z ,
u2pu = arg z .u
r = ƒ x + iy ƒ .
u
ƒ x + iy ƒ = 2x2+ y2 .
OP§x + iy
z = x + iy = rscos u + i sin ud .
A.5 Complex Numbers AP-17
x x
y y
�� � arg zr � 1
O O
ei� � cos � � i sin � ei� � cos � � i sin �
(cos �, sin �)
(a) (b)
FIGURE A.5 Argand diagrams for (a) as avector and (b) as a point.
eiu= cos u + i sin u
Products
To multiply two complex numbers, we multiply their absolute values and add their angles. Let
(11)z1 = r1 eiu1, z2 = r2 eiu2 ,
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 17
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiso that
Then
and hence
(12)
Thus, the product of two complex numbers is represented by a vector whose length is theproduct of the lengths of the two factors and whose argument is the sum of their arguments(Figure A.6). In particular, from Equation (12) a vector may be rotated counterclockwisethrough an angle by multiplying it by Multiplication by i rotates 90°, by rotates180°, by rotates 270°, and so on.
EXAMPLE 2 Finding a Product of Complex Numbers
Let We plot these complex numbers in an Argand diagram(Figure A.7) from which we read off the polar representations
Then
The notation exp (A) stands for
Quotients
Suppose in Equation (11). Then
Hence
That is, we divide lengths and subtract angles for the quotient of complex numbers.
EXAMPLE 3 Let and as in Example 2. Then
L 0.183 + 0.683i .
1 + i23 - i
=
22eip>42e-ip>6 =
222
e5pi>12L 0.707 acos
5p12
+ i sin 5p12b
z2 = 23 - i ,z1 = 1 + i
` z1z2` =
r1r2
=
ƒ z1 ƒ
ƒ z2 ƒ
and arg az1z2b = u1 - u2 = arg z1 - arg z2.
z1z2
=
r1 eiu1
r2 eiu2=
r1r2
eisu1 -u2d .
r2 Z 0
eA .
= 222 acos p12
+ i sin p12b L 2.73 + 0.73i .
z1 z2 = 222 exp aip4
-
ip6b = 222 exp aip
12b
z1 = 22e ip>4, z2 = 2e-ip>6 .
z1 = 1 + i, z2 = 23 - i .
- i-1eiu .u
arg sz1 z2d = u1 + u2 = arg z1 + arg z2 .
ƒ z1 z2 ƒ = r1 r2 = ƒ z1 ƒ#ƒ z2 ƒ
z1 z2 = r1 eiu1 # r2 eiu2= r1 r2 eisu1 +u2d
ƒ z1 ƒ = r1, arg z1 = u1; ƒ z2 ƒ = r2, arg z2 = u2 .
AP-18 Appendices
x
y
O
�1
�2
�1
z1z2
r1r2
r2 r1
z1
z2
FIGURE A.6 When and aremultiplied, andarg sz1 z2d = u1 + u2 .
ƒ z1 z2 ƒ = r1# r2
z2z1
0
1
–1
x
y
�2
�3 � 1
1 � �3
2�2
21
z1z2
z1 � 1 � i
z2 � �3 � i
�4 �
12�6
–
FIGURE A.7 To multiply two complexnumbers, multiply their absolute valuesand add their arguments.
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 18
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiPowers
If n is a positive integer, we may apply the product formulas in Equation (12) to find
With we obtain
(13)
The length is raised to the nth power and the angle is multiplied by n.If we take in Equation (13), we obtain De Moivre’s Theorem.r = 1
u = arg zr = ƒ z ƒ
= rneinu .
zn= sreiudn
= rneisu+u+Á
+ud
z = reiu ,
zn= z # z # Á # z .
A.5 Complex Numbers AP-19
n factors
n summands
De Moivre’s Theorem
(14)scos u + i sin udn= cos nu + i sin nu .
If we expand the left side of De Moivre’s equation above by the Binomial Theoremand reduce it to the form we obtain formulas for and as polynomialsof degree n in and
EXAMPLE 4 If in Equation (14), we have
The left side of this equation expands to
The real part of this must equal and the imaginary part must equal Therefore,
Roots
If is a complex number different from zero and n is a positive integer, then thereare precisely n different complex numbers that are nth roots of z. To seewhy, let be an nth root of so that
or
Then
is the real, positive nth root of r. For the argument, although we cannot say that andmust be equal, we can say that they may differ only by an integer multiple of That
is,
na = u + 2kp, k = 0, ;1, ;2, Á .
2p .u
na
r = 2n r
rneina= reiu .
wn= z
z = reiu ,w = reiaw0, w1, Á , wn - 1 ,
z = reiu
sin 3u = 3 cos2 u sin u - sin3 u .
cos 3u = cos3 u - 3 cos u sin2 u,
sin 3u .cos 3u
cos3 u + 3i cos2 u sin u - 3 cos u sin2 u - i sin3 u .
scos u + i sin ud3= cos 3u + i sin 3u .
n = 3
sin u .cos u
sin nucos nua + ib ,
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 19
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTherefore,
Hence, all the nth roots of are given byz = reiu
a =
un + k
2pn .
AP-20 Appendices
(15)2n reiu= 2n r exp i aun + k
2pn b , k = 0, ;1, ;2, Á .
There might appear to be infinitely many different answers corresponding to theinfinitely many possible values of k, but gives the same answer as inEquation (15). Thus, we need only take n consecutive values for k to obtain all thedifferent nth roots of z. For convenience, we take
All the nth roots of lie on a circle centered at the origin and having radius equal tothe real, positive nth root of r. One of them has argument The others are uni-formly spaced around the circle, each being separated from its neighbors by an angle equalto Figure A.8 illustrates the placement of the three cube roots, of thecomplex number
EXAMPLE 5 Finding Fourth Roots
Find the four fourth roots of
Solution As our first step, we plot the number in an Argand diagram (Figure A.9)and determine its polar representation Here, and One ofthe fourth roots of is We obtain others by successive additions of
to the argument of this first one. Hence,
and the four roots are
The Fundamental Theorem of Algebra
One might say that the invention of is all well and good and leads to a number sys-tem that is richer than the real number system alone; but where will this process end? Are
2-1
w3 = 2 ccos 7p4
+ i sin 7p4d = 22s1 - id .
w2 = 2 ccos 5p4
+ i sin 5p4d = 22s -1 - id
w1 = 2 ccos 3p4
+ i sin 3p4d = 22s -1 + id
w0 = 2 ccos p4
+ i sin p4d = 22s1 + id
24 16 exp ip = 2 exp i ap4
, 3p4
, 5p4
, 7p4b ,
2p>4 = p>2 2eip>4 .16eipu = p .z = -16, r = +16,reiu .
-16
-16.
z = reiu .w0, w1, w2 ,2p>n .
a = u>n .reiu
k = 0, 1, 2, Á , n - 1.
k = mk = n + m
x
y
O
r
w2
w1
w0
2�3
2�3
2�3
r1/3
z � rei�
�
�3
FIGURE A.8 The three cube roots ofz = reiu .
2
x
y
–16
w0
w3w2
w1
�4
�2
�2
�2
�2
FIGURE A.9 The four fourth roots of-16.
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 20
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiwe also going to invent still more systems so as to obtain and so on? But itturns out this is not necessary. These numbers are already expressible in terms of the com-plex number system In fact, the Fundamental Theorem of Algebra says that withthe introduction of the complex numbers we now have enough numbers to factor everypolynomial into a product of linear factors and so enough numbers to solve every possiblepolynomial equation.
a + ib .
41-1, 61-1,
A.5 Complex Numbers AP-21
The Fundamental Theorem of AlgebraEvery polynomial equation of the form
in which the coefficients are any complex numbers, whose degree nis greater than or equal to one, and whose leading coefficient is not zero, hasexactly n roots in the complex number system, provided each multiple root ofmultiplicity m is counted as m roots.
an
a0, a1, Á , an
an zn+ an - 1 zn - 1
+Á
+ a1 z + a0 = 0,
A proof of this theorem can be found in almost any text on the theory of functions of acomplex variable.
EXERCISES A.5
Operations with Complex Numbers1. How computers multiply complex numbers Find
a. b.
c.
(This is how complex numbers are multiplied by computers.)
2. Solve the following equations for the real numbers, x and y.
a.
b.
c.
Graphing and Geometry3. How may the following complex numbers be obtained from
geometrically? Sketch.
a. b.
c. d. 1 z
4. Show that the distance between the two points and in anArgand diagram is ƒ z1 - z2 ƒ .
z2z1
>-z
s -zdz
z = x + iy
s3 - 2idsx + iyd = 2sx - 2iyd + 2i - 1
a1 + i1 - i
b2
+
1x + iy
= 1 + i
s3 + 4id2- 2sx - iyd = x + iy
s -1, -2d # s2, 1ds2, -1d # s -2, 3ds2, 3d # s4, -2d
= sac - bd, ad + bcd .sa, bd # sc, dd
In Exercises 5–10, graph the points that satisfy the givenconditions.
5. a. b. c.
6. 7.
8. 9.
10.
Express the complex numbers in Exercises 11–14 in the form with and Draw an Argand diagram for eachcalculation.
11. 12.
13. 14.
Powers and RootsUse De Moivre’s Theorem to express the trigonometric functions inExercises 15 and 16 in terms of and
15. 16.
17. Find the three cube roots of 1.
sin 4ucos 4u
sin u .cos u
s2 + 3ids1 - 2id1 + i23
1 - i23
1 + i1 - iA1 + 2-3 B2
-p 6 u … p .r Ú 0reiu ,
ƒ z + 1 ƒ Ú ƒ z ƒ
ƒ z + i ƒ = ƒ z - 1 ƒƒ z + 1 ƒ = ƒ z - 1 ƒ
ƒ z + 1 ƒ = 1ƒ z - 1 ƒ = 2
ƒ z ƒ 7 2ƒ z ƒ 6 2ƒ z ƒ = 2
z = x + iy
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 21
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi18. Find the two square roots of i.
19. Find the three cube roots of
20. Find the six sixth roots of 64.
21. Find the four solutions of the equation
22. Find the six solutions of the equation
23. Find all solutions of the equation
24. Solve the equation
Theory and Examples25. Complex numbers and vectors in the plane Show with an
Argand diagram that the law for adding complex numbers is thesame as the parallelogram law for adding vectors.
26. Complex arithmetic with conjugates Show that the conjugateof the sum (product, or quotient) of two complex numbers, and
, is the same as the sum (product, or quotient) of theirconjugates.
27. Complex roots of polynomials with real coefficients come incomplex-conjugate pairs
z2
z1
x4+ 1 = 0.
x4+ 4x2
+ 16 = 0.
z6+ 2z3
+ 2 = 0.
z4- 2z2
+ 4 = 0.
-8i .a. Extend the results of Exercise 26 to show that if
is a polynomial with real coefficients
b. If z is a root of the equation where ƒ(z) is apolynomial with real coefficients as in part (a), show that the conjugate is also a root of the equation. (Hint: Let
then both u and y are zero. Use the factthat )
28. Absolute value of a conjugate Show that
29. When If z and are equal, what can you say about thelocation of the point z in the complex plane?
30. Real and imaginary parts Let Re(z) denote the real part of zand Im(z) the imaginary part. Show that the following relationshold for any complex numbers and
a. b.
c.
d.
e. ƒ z1 + z2 ƒ … ƒ z1 ƒ + ƒ z2 ƒ
ƒ z1 + z2 ƒ2
= ƒ z1 ƒ2
+ ƒ z2 ƒ2
+ 2Resz1z2dƒ Reszd ƒ … ƒ z ƒ
z - z = 2iImszdz + z = 2Reszdz2 .z, z1 ,
zz = zƒ z ƒ = ƒ z ƒ .
ƒszd = ƒszd = u - iy .ƒszd = u + iy = 0;
z
ƒszd = 0,
a0, Á , an .
ƒszd = an zn+ an - 1 zn - 1
+Á
+ a1 z + a0
ƒszd = ƒszd
AP-22 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 22
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz YousufiAP-22 Appendices
M
M'
u
v''
90˚
v
v'
O u � v
�
�
FIGURE A.10 As explained in the text, u * v = ƒ u ƒ v–.
The Distributive Law for Vector Cross Products
In this appendix, we prove the Distributive Law
which is Property 2 in Section 12.4.
Proof To derive the Distributive Law, we construct a new way. We draw u and vfrom the common point O and construct a plane M perpendicular to u at O (Figure A.10).We then project v orthogonally onto M, yielding a vector with length We rotate
about u in the positive sense to produce a vector Finally, we multiply by thev–v– .v¿ 90°ƒ v ƒ sin u.v¿
u * v
u * sv + wd = u * v + u * w
A.6
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 22
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufilength of u. The resulting vector is equal to since has the same direction asby its construction (Figure A.10) and
Now each of these three operations, namely,
1. projection onto M
2. rotation about u through 90°
3. multiplication by the scalar
when applied to a triangle whose plane is not parallel to u, will produce another triangle. Ifwe start with the triangle whose sides are v, w, and (Figure A.11) and apply thesethree steps, we successively obtain the following:
1. A triangle whose sides are and satisfying the vector equation
2. A triangle whose sides are and satisfying the vector equation
(the double prime on each vector has the same meaning as in Figure A.10)
v– + w– = sv + wd–
sv + wd–v–, w– ,
v¿ + w¿ = sv + wd¿
sv + wd¿v¿, w¿,
v + w
ƒ u ƒ
ƒ u ƒ ƒ v– ƒ = ƒ u ƒ ƒ v¿ ƒ = ƒ u ƒ ƒ v ƒ sin u = ƒ u * v ƒ.
u * vv–u * vƒ u ƒ v–
A.7 The Mixed Derivative Theorem and the Increment Theorem AP-23
M
uw
v
v'w'
(v � w)'
v � w
FIGURE A.11 The vectors, and their projec-tions onto a plane perpendicular to u.
v, w, v + w ,
3. A triangle whose sides are and satisfying the vector equa-tion
Substituting and from our discussion above into this last equation gives
which is the law we wanted to establish.
u * v + u * w = u * sv + wd,
ƒ u ƒ sv + wd– = u * sv + wdƒ u ƒ v– = u * v, ƒ u ƒ w– = u * w,
ƒ u ƒ v– + ƒ u ƒ w– = ƒ u ƒ sv + wd–.
ƒ u ƒ sv + wd–ƒ u ƒ v–, ƒ u ƒ w– ,
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 23
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz YousufiA.7 The Mixed Derivative Theorem and the Increment Theorem AP-23
The Mixed Derivative Theorem and the Increment Theorem
This appendix derives the Mixed Derivative Theorem (Theorem 2, Section 14.3) and theIncrement Theorem for Functions of Two Variables (Theorem 3, Section 14.3). Euler firstpublished the Mixed Derivative Theorem in 1734, in a series of papers he wrote onhydrodynamics.
A.7
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 23
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
AP-24 Appendices
THEOREM 2 The Mixed Derivative TheoremIf ƒ(x, y) and its partial derivatives and are defined throughout anopen region containing a point (a, b) and are all continuous at (a, b), thenƒxysa, bd = ƒyxsa, bd .
ƒyxƒx, ƒy, ƒxy ,
Proof The equality of and can be established by four applications ofthe Mean Value Theorem (Theorem 4, Section 4.2). By hypothesis, the point (a, b) lies inthe interior of a rectangle R in the xy-plane on which and are all defined.We let h and k be the numbers such that the point also lies in R, and weconsider the difference
(1)
where
(2)
We apply the Mean Value Theorem to F, which is continuous because it is differentiable.Then Equation (1) becomes
(3)
where lies between a and From Equation (2).
so Equation (3) becomes
(4)
Now we apply the Mean Value Theorem to the function and have
or
for some between b and By substituting this into Equation (4), we get
(5)
for some point in the rectangle whose vertices are the four points (a, b),and (See Figure A.12.)
By substituting from Equation (2) into Equation (1), we may also write
(6)where
(7)
The Mean Value Theorem applied to Equation (6) now gives
(8)¢ = kf¿sd2d
fs yd = ƒsa + h, yd - ƒsa, yd .
= fsb + kd - fsbd,
= [ƒsa + h, b + kd - ƒsa, b + kd] - [ƒsa + h, bd - ƒsa, bd]
¢ = ƒsa + h, b + kd - ƒsa + h, bd - ƒsa, b + kd + ƒsa, bd
sa, b + kd .sa + h, bd, sa + h, b + kd ,R¿sc1, d1d
¢ = hkƒxysc1, d1d
b + k .d1
ƒxsc1, b + kd - ƒxsc1, bd = kƒxysc1, d1d
gsb + kd - gsbd = kg¿sd1d ,
gs yd = fxsc1, yd
¢ = h[ƒxsc1, b + kd - ƒxsc1, bd] .
F¿sxd = ƒxsx, b + kd - ƒxsx, bd ,
a + h .c1
¢ = hF¿sc1d ,
Fsxd = ƒsx, b + kd - ƒsx, bd .
¢ = Fsa + hd - Fsad ,
sa + h, b + kdƒyxƒ, ƒx, ƒy, ƒxy ,
ƒyxsa, bdƒxysa, bd
x
y
R
0
h
k R'
(a, b)
FIGURE A.12 The key to provingis that no matter how
small is, and take on equalvalues somewhere inside (although notnecessarily at the same point).
R¿
ƒyxƒxyR¿
ƒxysa, bd = ƒyxsa, bd
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 24
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufifor some between b and By Equation (7),
(9)
Substituting from Equation (9) into Equation (8) gives
Finally, we apply the Mean Value Theorem to the expression in brackets and get
(10)
for some between a and Together, Equations (5) and (10) show that
(11)
where and both lie in the rectangle (Figure A.12). Equation (11) isnot quite the result we want, since it says only that has the same value at that
has at The numbers h and k in our discussion, however, may be made assmall as we wish. The hypothesis that and are both continuous at (a, b) meansthat and where each of
as both Hence, if we let h and we have
The equality of and can be proved with hypotheses weaker than theones we assumed. For example, it is enough for and to exist in R and for to becontinuous at (a, b). Then will exist at (a, b) and equal at that point.ƒxyƒyx
ƒxyƒyƒ, ƒx ,ƒyxsa, bdƒxysa, bd
ƒxysa, bd = ƒyxsa, bd .k : 0,h, k : 0.P1, P2 : 0
ƒyxsc2, d2d = ƒyxsa, bd + P2 ,ƒxysc1, d1d = ƒxysa, bd + P1
ƒyxƒxy
sc2, d2d .ƒyx
sc1, d1dƒxy
R¿sc2, d2dsc1, d1d
ƒxysc1, d1d = ƒyxsc2, d2d ,
a + h .c2
¢ = khƒyxsc2, d2d
¢ = k[ƒysa + h, d2d - ƒysa, d2d] .
f¿s yd = ƒysa + h, yd - ƒysa, yd .
b + k .d2
A.7 The Mixed Derivative Theorem and the Increment Theorem AP-25
THEOREM 3 The Increment Theorem for Functions of Two VariablesSuppose that the first partial derivatives of are defined throughout anopen region R containing the point and that and are continuous at
Then the change in the valueof ƒ that results from moving from to another point in R satisfies an equation of the form
in which each of as both ¢x, ¢y : 0.P1, P2 : 0
¢z = ƒxsx0, y0d¢x + ƒysx0, y0d¢y + P1¢x + P2¢y ,
sx0 + ¢x, y0 + ¢ydsx0, y0d¢z = ƒsx0 + ¢x, y0 + ¢yd - ƒsx0, y0dsx0, y0d .
ƒyƒxsx0, y0dz = ƒsx, yd
Proof We work within a rectangle T centered at and lying within R, and weassume that and are already so small that the line segment joining A to
and the line segment joining B to lie in the interiorof T (Figure A.13).
We may think of as the sum of two increments, where
is the change in the value of ƒ from A to B and
is the change in the value of ƒ from B to C (Figure A.14).
¢z2 = ƒsx0 + ¢x, y0 + ¢yd - ƒsx0 + ¢x, y0d
¢z1 = ƒsx0 + ¢x, y0d - ƒsx0, y0d
¢z = ¢z1 + ¢z2¢z
Csx0 + ¢x, y0 + ¢ydBsx0 + ¢x, y0d¢y¢x
Asx0, y0d
T
C(x0 � �x, y0 � �y)
B(x0 � �x, y0)
A(x0, y0)
FIGURE A.13 The rectangular regionT in the proof of the Increment Theorem.The figure is drawn for and positive, but either increment might bezero or negative.
¢y¢x
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 25
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
AP-26 Appendices
y
z
x
Q
P''
P'
Q'
S
B
0
y0
P0
y0 � �y
(x0 � �x, y0) C(x0 � �x, y0 � �y)
A(x0, y0)
z � f (x, y)
� z1
� z2
� z
FIGURE A.14 Part of the surface near Thepoints and have the same height above the xy-plane. Thechange in z is The change
shown as is caused by changing x from to whileholding y equal to Then, with x held equal to
is the change in z caused by changing from which is represented byThe total change in z is the sum of and ¢z2 .¢z1Q¿S?
y0 + ¢y ,y0
¢z2 = ƒsx0 + ¢x, y0 + ¢yd - ƒsx0 + ¢x, y0d
x0 + ¢x ,y0 .x0 + ¢xx0P–Q = P¿Q¿ ,
¢z1 = ƒsx0 + ¢x, y0d - ƒsx0, y0d ,
¢z = P¿S .z0 = ƒsx0, y0dP–P0, P¿,
P0sx0, y0, ƒsx0, y0dd .z = ƒsx, yd
On the closed interval of x-values joining to the function is a differentiable (and hence continuous) function of x, with derivative
By the Mean Value Theorem (Theorem 4, Section 4.2), there is an x-value c between and at which
or
or
(12)
Similarly, is a differentiable (and hence continuous) functionof y on the closed y-interval joining and with derivative
G¿s yd = ƒysx0 + ¢x, yd.
y0 + ¢y ,y0
Gs yd = ƒsx0 + ¢x, yd
¢z1 = ƒxsc, y0d¢x .
ƒsx0 + ¢x, y0d - ƒsx0, y0d = ƒxsc, y0d¢x
Fsx0 + ¢xd - Fsx0d = F¿scd¢x
x0 + ¢xx0
F¿sxd = ƒxsx, y0d .
Fsxd = ƒsx, y0dx0 + ¢x,x0
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 26
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiHence, there is a y-value d between and at which
or
or
(13)
Now, as both and we know that and Therefore, since and are continuous at the quantities
(14)
both approach zero as both and Finally,
where both and as both and which is what we set out to prove.
Analogous results hold for functions of any finite number of independent variables.Suppose that the first partial derivatives of are defined throughout an openregion containing the point and that and are continuous at Then
(15)
where as and The partial derivatives in Equation (15) are to be evaluated at the point
Equation (15) can be proved by treating as the sum of three increments,
(16)
(17)
(18)
and applying the Mean Value Theorem to each of these separately. Two coordinates remainconstant and only one varies in each of these partial increments In Equa-tion (17), for example, only y varies, since x is held equal to and z is held equal to
Since is a continuous function of y with a derivative it is subjectto the Mean Value Theorem, and we have
for some between and y0 + ¢y .y0y1
¢w2 = ƒysx0 + ¢x, y1, z0d¢y
ƒy ,ƒsx0 + ¢x, y, z0dz0 .x0 + ¢x
¢w1, ¢w2, ¢w3 .
¢w3 = ƒsx0 + ¢x, y0 + ¢y, z0 + ¢zd - ƒsx0 + ¢x, y0 + ¢y, z0d ,
¢w2 = ƒsx0 + ¢x, y0 + ¢y, z0d - ƒsx0 + ¢x, y0, z0d
¢w1 = ƒsx0 + ¢x, y0, z0d - ƒsx0, y0, z0d
¢wsx0, y0, z0d .
ƒx, ƒy, ƒz
¢z : 0.¢x, ¢y ,P1, P2, P3 : 0
= ƒx¢x + ƒy¢y + ƒz¢z + P1¢x + P2¢y + P3¢z,
¢w = ƒsx0 + ¢x, y0 + ¢y, z0 + ¢zd - ƒsx0, y0, z0d
sx0, y0, z0d .ƒzƒx, ƒy ,sx0, y0, z0dw = ƒsx, y, zd
¢y : 0,¢xP2 : 0P1
= ƒxsx0, y0d¢x + ƒysx0, y0d¢y + P1¢x + P2¢y,
= [ƒxsx0, y0d + P1]¢x + [ƒysx0, y0d + P2]¢y
= ƒxsc, y0d¢x + ƒysx0 + ¢x, dd¢y
¢z = ¢z1 + ¢z2
¢y : 0.¢x
P2 = ƒysx0 + ¢x, dd - ƒysx0, y0d
P1 = ƒxsc, y0d - ƒxsx0, y0d,
sx0, y0d ,ƒy
ƒxd : y0 .c : x0¢y : 0,¢x
¢z2 = ƒysx0 + ¢x, dd¢y.
ƒsx0 + ¢x, y0 + ¢yd - ƒsx0 + ¢x, yd = ƒysx0 + ¢x, dd¢y
Gs y0 + ¢yd - Gs y0d = G¿sdd¢y
y0 + ¢yy0
A.7 The Mixed Derivative Theorem and the Increment Theorem AP-27
From Equations(12) and (13)
From Equa-tion (14)
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 27
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufi
Proof In the notation of Figure A.15, which shows a typical parallelogram determined byvectors u and v and its orthogonal projection onto a plane with unit normal vector p,
Similarly,
for some scalar t. Hence,
(1)
0
The vectors and are both orthogonal to p. Hence, when we dot both sidesof Equation (1) with p, the only nonzero term on the right is That is,
In particular,
(2)
The absolute value on the right is the volume of the box determined by and p. Theheight of this particular box is so the box’s volume is numerically the same as itsbase area, the area of parallelogram Combining this observation with Equation (2)gives
which says that the area of the orthogonal projection of the parallelogram determined by uand v onto a plane with unit normal vector p is This is what we set out to prove.
EXAMPLE 1 Finding the Area of a Projection
Find the area of the orthogonal projection onto the xy-plane of the parallelogram deter-mined by the points P(0, 0, 3), R(3, 2, 1), and S(1, 3, 2) (Figure A.16).Qs2, -1, 2d ,
ƒ su * vd # p ƒ .
Area of P¿Q¿R¿S¿ = ƒ su¿ * v¿d # p ƒ = ƒ su * vd # p ƒ ,
P¿Q¿R¿S¿ .ƒ p ƒ = 1,
u¿, v¿ ,
ƒ su * vd # p ƒ = ƒ su¿ * v¿d # p ƒ .
su * vd # p = su¿ * v¿d # p.
su¿ * v¿ d # p .u¿ * pp * v¿
(')'*
= su¿ * v¿d + ssp * v¿d + tsu¿ * pd + stsp * pd.
u * v = su¿ + spd * sv¿ + tpd
v = v¿ + tp
= u¿ + sp .
= u¿ + PP§¿ - QQ§¿
u = PP§¿ + u¿ + Q¿Q§
AP-28 Appendices
The Area of a Parallelogram’s Projection on a Plane
This appendix proves the result needed in Section 16.5 that is the area of theprojection of the parallelogram with sides determined by u and v onto any plane whosenormal is p. (See Figure A.15.)
ƒ su * vd # p ƒ
A.8
p
P
Q'
R'
P'
QS
S'
u' v'
u v
R
FIGURE A.15 The parallelogramdetermined by two vectors u and v in spaceand the orthogonal projection of theparallelogram onto a plane. The projectionlines, orthogonal to the plane, lie parallelto the unit normal vector p.
THEOREMThe area of the orthogonal projection of the parallelogram determined by twovectors u and v in space onto a plane with unit normal vector p is
Area = ƒ su * vd # p ƒ .
(For some scalar s because) is parallel to p)(PP§¿ - QQ§¿
sQ¿Q§ = -QQ§¿d
P(0, 0, 3)
S(1, 3, 2)
R(3, 2, 1)
Q(2, –1, 2)
k
z
x
y
FIGURE A.16 Example 1 calculates thearea of the orthogonal projection ofparallelogram PQRS on the xy-plane.
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 28
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiSolution With
we have
so the area is ƒ su * vd # p ƒ = ƒ 7 ƒ = 7.
su * vd # p = 3 2 -1 -1
1 3 -1
0 0 1
3 = ` 2 -1
1 3` = 7,
u = PQ§ = 2i - j - k, v = PS§ = i + 3j - k, and p = k ,
A.9 Basic Algebra, Geometry, and Trigonometry Formulas AP-29
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 29
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad Hassan Riaz Y
ousufiA.9 Basic Algebra, Geometry, and Trigonometry Formulas AP-29
Basic Algebra, Geometry, and Trigonometry Formulas
Algebra
Arithmetic Operations
Laws of Signs
Zero Division by zero is not defined.
If
For any number a:
Laws of Exponents
If
The Binomial Theorem For any positive integer n,
+
nsn - 1dsn - 2d1 # 2 # 3
an - 3b3+
Á+ nabn - 1
+ bn .
sa + bdn= an
+ nan - 1b +
nsn - 1d1 # 2
an - 2b2
am
an = am - n, a0= 1, a-m
=1
am .
a Z 0,
am>n= 2n am
= A2n a Bmaman= am + n, sabdm
= ambm, samdn= amn,
a # 0 = 0 # a = 0
0a = 0, a0
= 1, 0a= 0a Z 0:
-s -ad = a, -ab
= -
ab
=
a-b
ab
+
cd
=
ad + bcbd
, a>bc>d =
ab
# dc
asb + cd = ab + ac, ab
# cd
=
acbd
A.9
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 29
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiFor instance,
Factoring the Difference of Like Integer Powers,
For instance,
Completing the Square If
The Quadratic Formula If and then
Geometry
Formulas for area, circumference, and volume:
Triangle Similar Triangles Pythagorean Theorem
a
bc
a2 � b2 � c2
b
c c' a'
b'
a
a'a �
b'b �
c'c
b
h
A � bh12
V = volumedS = lateral area or surface area,circumference,B = area of base, C =sA = area,
x =
-b ; 2b2- 4ac
2a.
ax2+ bx + c = 0,a Z 0
= au 2+ C su = x + sb>2add
Call this part C.This is ax +
b2ab2
.
(')'*('''')''''*
= a ax 2+
ba x +
b2
4a2 b + c -
b2
4a
= a ax 2+
ba x +
b2
4a2 b + a a-
b2
4a2 b + c
= a ax 2+
ba x +
b2
4a2 -
b2
4a2 b + c
ax2+ bx + c = a ax 2
+
ba xb + c
a Z 0,
a4- b4
= sa - bdsa3+ a2b + ab2
+ b3d .
a3- b3
= sa - bdsa2+ ab + b2d,
a2- b2
= sa - bdsa + bd,
an- bn
= sa - bdsan - 1+ an - 2b + an - 3b2
+Á
+ abn - 2+ bn - 1d
n>1
sa + bd3= a3
+ 3a2b + 3ab2+ b3, sa - bd3
= a2- 3a2b + 3ab2
- b3 .
sa + bd2= a2
+ 2ab + b2, sa - bd2= a2
- 2ab + b2
AP-30 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 30
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiParallelogram Trapezoid Circle
Any Cylinder or Prism with Parallel Bases Right Circular Cylinder
Any Cone or Pyramid Right Circular Cone Sphere
Trigonometry Formulas
Definitions and Fundamental Identities
Tangent: tan u =
yx =
1cot u
Cosine: cos u =
xr =
1sec u
Sine: sin u =
yr =
1csc u
V � �r 3, S � 4�r 243
h
s
r
V � �r2h13
S � �rs � Area of side
hh
V � Bh13
B
B
V � �r2hS � 2�rh � Area of side
h
r
hh
V � BhB
B
A � �r2,C � 2�r
r
a
b
h
A � (a � b)h12
h
b
A � bh
A.9 Basic Algebra, Geometry, and Trigonometry Formulas AP-31
r
O x
y�
P(x, y)
y
x
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 31
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiIdentities
cos A - cos B = -2 sin 12
sA + Bd sin 12
sA - Bd
cos A + cos B = 2 cos 12
sA + Bd cos 12
sA - Bd
sin A - sin B = 2 cos 12
sA + Bd sin 12
sA - Bd
sin A + sin B = 2 sin 12
sA + Bd cos 12
sA - Bd
sin A cos B =12
sin sA - Bd +12
sin sA + Bd
cos A cos B =12
cos sA - Bd +12
cos sA + Bd
sin A sin B =12
cos sA - Bd -12
cos sA + Bd
sin aA +
p2b = cos A, cos aA +
p2b = -sin A
sin aA -
p2b = -cos A, cos aA -
p2b = sin A
tan sA - Bd =
tan A - tan B1 + tan A tan B
tan sA + Bd =
tan A + tan B1 - tan A tan B
,
cos sA - Bd = cos A cos B + sin A sin B
cos sA + Bd = cos A cos B - sin A sin B
sin sA - Bd = sin A cos B - cos A sin B
sin sA + Bd = sin A cos B + cos A sin B
cos2 u =
1 + cos 2u2
, sin2 u =
1 - cos 2u2
sin 2u = 2 sin u cos u, cos 2u = cos2 u - sin2 u
sin2 u + cos2 u = 1, sec2 u = 1 + tan2 u, csc2 u = 1 + cot2 u
sin s -ud = -sin u, cos s -ud = cos u
AP-32 Appendices
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 32
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN

Muhammad
Hassan
Riaz You
sufiTrigonometric Functions
Radian Measure
�2
45
45 901
1
1
1 1
1
�2
�4
�3
�2
�6
�4
2 2
30
9060
Degrees Radians
�2
�3�3
s
r
1θ
Circle of radius r
Unit circle
A.9 Basic Algebra, Geometry, and Trigonometry Formulas AP-33
The angles of two common triangles, in degreesand radians.
x
y
y � cos x
Domain: (–�, �)Range: [–1, 1]
0–� � 2�–�2
�2
3�2
y � sin x
x
y
0–� � 2�–�2
�2
3�2
y � sin x
Domain: (–�, �)Range: [–1, 1]
y
x
y � tan x
3�2
– –� –�2
0 �2
� 3�2
Domain: All real numbers except odd integer multiples of �/2 Range: (–�, �)
x
yy � csc x
0
1
–� � 2�–�2
�2
3�2
Domain: x � 0, ��, �2�, . . .Range: (–�, –1] h [1, �)
y
x
y � cot x
0
1
–� � 2�–�2
�2
3�2
Domain: x � 0, ��, �2�, . . .Range: (–�, �)
x
yy � sec x
3�2
– –� –�2
0
1
�2
� 3�2
Domain: x �� , � , . . .
Range: (–�, –1] h [1, �)
�2
3�2
180° = p radians.
sr =
u1
= u or u =
sr,
4100AWL/Thomas_APPp001-034 8/27/04 6:50 AM Page 33
Bismillah hir Rehman nir Raheem--****--Asalat o Wasalam o alika Ya RasoolALLAH
To Read it Online & Download: WWW.ISSUU.COM/SHEIKHUHASSAN