Embed Size (px)
Citation preview
Whether it is as the laser sail for ultralight spacecraft, such as the Breakthrough Starshot1, or in van der Waals heterostructures2, materials with an extremely large radius- to-thickness aspect ratio are garnering interest for a range of applications. As an extreme example of a high- aspect-ratio material, it is estimated1 that the Starshot light sail (with a radius, R, of ~3 m) would need to have a thickness, t, of ~30 nm to enable it to be accelerated to 20% of the speed of light by laser pulses directed from Earth. However, such thin materials rarely stay flat, and therefore understanding their modes of defor-mation in three dimensions is a central question at the intersection of materials science, engineering, physics and mathematics.
Traditionally, the avoidance of deformation, specifi-cally instabilities such as buckling (Fig. 1a), has been a guiding principle for engineering applications. More recently, however, it has been realized that some fea-tures of these deformations are favourable and may be exploited in a range of applications3; examples include the ability to generate regular small- scale patterns over large length scales in photovoltaic devices4 and phase diffraction gratings5, as well as the pseudo- magnetic fields associated with out- of-plane deformations in graphene6,7. Indeed, several techniques to generate 3D shapes from 2D structures have been studied in detail, including the formation of a spherical ‘grid shell’ from a square array of connected rods8; the use of local rein-forcement to sculpt responsive, textured 3D surfaces9; and the coating of droplets by thin sheets to fabricate coated particles at various scales10–12.
The typical energetic cost of stretching a thin elastic sheet scales with its thickness, t, whereas the energetic cost of bending the same sheet scales with t3 (reF.13). As these energetic costs scale differently with thickness, thin sheets (such as paper) are difficult to stretch or compress but readily bend; as Lord Rayleigh14 explained “when the thickness is diminished without limit, the actual dis-placement will be one of pure bending, if such there be, consistent with the given conditions.”
In pure bending, the material off the centre- line is stretched or compressed asymmetrically (the thickness- integrated stress then vanishes while the asymmetry of stretching gives the bending energy proportional to t3, discussed above). Perhaps the most familiar example of pure bending is euler buckling, which is observed when a sheet of paper or card of length L and Young’s modulus E is subjected to an in- plane compressive force per unit width, P: if ≳ ∕P Et L3 2, then the card buckles out of plane in one direction13 (Fig. 1a). The centre- line of the card becomes curved, but the change in its length is negligible provided that t/L ≪ 1.
Considering only the behaviour of the centre- line for more general deformations, pure bending requires defor-mations that preserve lengths within the object. Such deformations are known as isometries, and, provided that the deformation remains suitably smooth, they are governed by Gauss’s Theorema Egregium ('Remarkable Theorem')15, which states that the gaussian curvature, KG, must remain constant under local isometry.
For a flat sheet, the Gaussian curvature is zero; the Theorema Egregium suggests that in any deformation,
BucklingBending or giving way under compression.
Pure bendingBending without stretching of the centre- line of a surface.
Euler bucklingThe buckling of a 1D structure over its whole length and confined to a single plane.
IsometriesDeformations of a surface that preserve distances between points, as measured within the surface.
Gaussian curvatureThe product of the principal curvatures of a surface; gaussian curvature is an intrinsic property of a surface, depending only on distances measured in the surface itself.
Buffering by buckling as a route for elastic deformationDominic Vella
Abstract | Thin objects are deformed in a range of applications and at a range of scales, from graphene and the actuators used in soft robots to the light sails of spacecraft. Such deformations are constrained, as it is much easier to bend than to stretch a thin object — this constraint is often used to determine the deformations that are allowed and those that are prohibited. Recently, however, a series of applications has emerged in which apparently prohibited deformations are observed. In many of these examples, the apparent ability to stretch and compress (as well as bend) is facilitated by excess material that is stored in microscopic buckled structures: the changes in length that are required to enable particular deformations are ‘buffered by buckling’. In this Review, I discuss buffering by buckling as a means of enabling elastic deformations without significant changes of material length (thereby distinguishing this mechanism from material swelling and growth). I discuss a range of examples from technology and nature and consider the conditions under which buffering by buckling operates.
Mathematical Institute, University of Oxford, Oxford, UK.
e- mail: dominic.vella@ maths.ox.ac.uk
https://doi.org/10.1038/ s42254-019-0063-1
REVIEWS
Nature reviews | Physics

a flat, infinitesimally thin sheet may become locally curved in one principal direction but must remain flat in the other principal direction — a flat sheet cannot become doubly curved. A deformation that preserves Gaussian curvature is seen in the Euler buckling of the card in Fig. 1a: the card is curved in the direction of compression but uncurved in the orthogonal direc-tion (as this deformation is uniform in one direction, it is sometimes referred to as a cylindrical deformation). Other examples of isometry exist, and two of the most common are the developable cone16–20 (d- cone) and mirror buckling of a sphere21–25 (Box 1). These modes of deformation are only perfect isometries in the limit of vanishing thickness; with a finite thickness, the effects of stretching tend to be localized in small core and/or boundary regions21,24–29. Nevertheless, ideal isometries are frequently useful as the basis for understanding more complicated deformation patterns, from isolated and interacting d- cones in crumpled paper16,27,30,31 to cylindri-cal deformations in tearing29,32 and mirror buckling in the response of rippled graphene to electrostatic loads22,33.
Even with a range of isometric deformation modes, the requirement that thin objects should deform isomet-rically (and hence not change their Gaussian curvature) is extremely restrictive. One way around these restric-tions is to add more material, a strategy that is adopted in a host of biological examples in which intricate shapes are created by differential growth34–38. Similarly, artificial systems often change shape from two to three dimen-sions by swelling the material with a solvent39–41, heat-ing42–44 or pneumatic inflation45,46. In such cases, some understanding of the accessible shapes can be gained by generalizing the concept of a d- cone to account for the addition of new material, leading to the excess cone (e- cone) isometry19,47,48. More generally, however, the main focus has been to design an expansion strategy that will realize a particular 3D shape41–43,46,49.
Although there is an immense variety of shapes that can be created by growth or swelling, the focus in this Review is on a range of situations in which elas-tic objects appear to change length without appreci-able actual changes in length (as measured within the material). Such materials may appear to be extremely extensible when loaded in a single dimension and may adopt more complex 3D shapes than are allowed by
the set of isometries already discussed. An illustrative example of how this can be achieved is the closing of an umbrella (Fig. 1b). In its open state, an umbrella is doubly curved (KG > 0); however, when closed, its appar-ent shape is cone- like (KG = 0). Upon closing, the excess material between each of the ribs of the umbrella is not compressed to nothing but instead goes into a series of floppy folds between each rib. As a result, the apparent distance between each rib shrinks considerably, ena-bling the gross shape to change its Gaussian curvature. Naturally, the material stored within the folds is ready to be deployed the next time the umbrella is opened. The folds between the ribs in an umbrella therefore act as a buffer for the excess length that is generated by closing.
This Review considers an emergent class of prob-lems that are qualitatively similar to the example of the umbrella — that is, deformations that would ordinar-ily be prohibited by the energetic cost of changing the length of a material but are enabled by buckling out of plane. In this sense, the required change in length is ‘buffered by buckling’. The intention of this Review is to emphasize the commonality of different scenar-ios that exhibit buffering by buckling, to discuss the essential ingredients that enable this phenomenon and to highlight that these mechanisms allow for types of deformation that might otherwise not be possible. Taking inspiration from examples in nature and engi-neering applications, we demonstrate that there are several routes through which buffering by buckling can be achieved. These include the removal and cutting of material (enabling the material that remains to buckle), the introduction of a designed fine- scale structure that buckles and the spontaneous emergence of microscopic structure through buckling. Each of these three classes is considered in turn.
Removing material and cuttingTailors routinely cut away excess material to enable the remaining material to be fashioned into non- flat gar-ments50, and this approach has also been used in some designs of soccer balls51. The removal of material from a flat sheet in these examples facilitates an apparent change in Gaussian curvature in two ways: first, there is less material to compress when changing shape, and second, the flat portions of the material that remain are more free to bend as required because they are no longer constrained by the elements that have been removed. This latter increase in flexibility may also be achieved simply by introducing cuts (without necessarily remov-ing material); indeed, cutting (and then folding) paper to enable it to deform in three dimensions is the basis of the art form kirigami52.
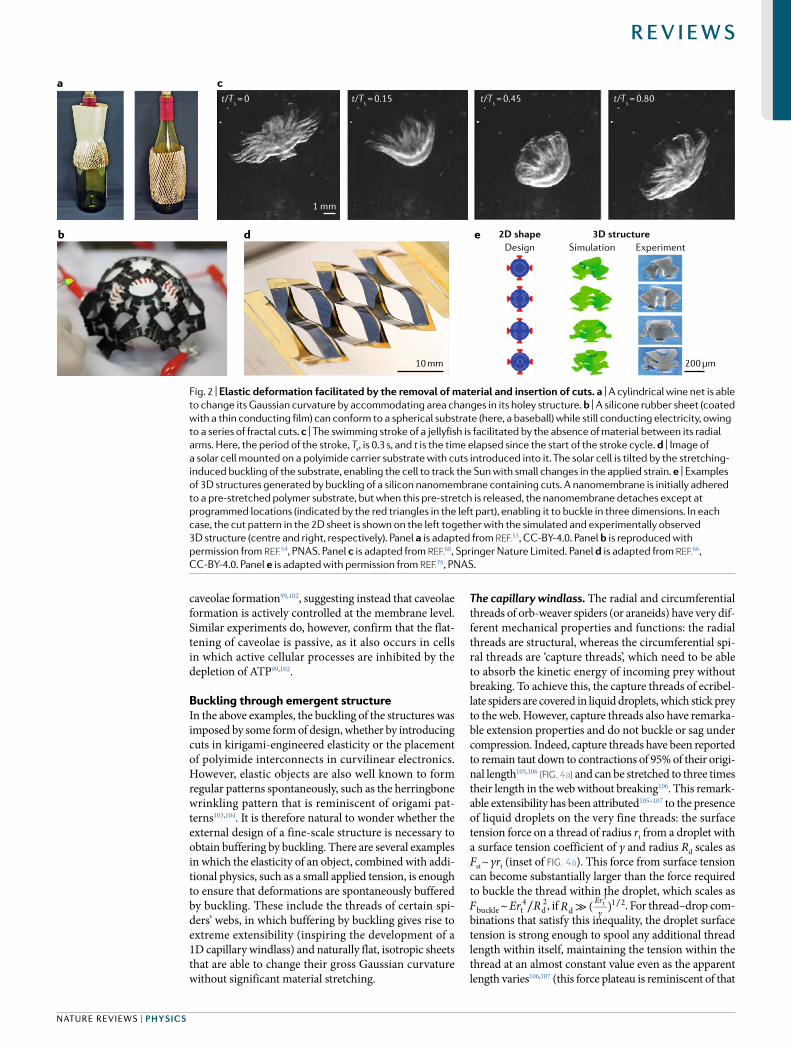
The cylindrical nets used to protect wine bottles are an everyday example of how the removal of material can facilitate shape change (Fig. 2a). Despite the gross shape of the net having zero Gaussian curvature in the unde-formed configuration (as the net is naturally cylindrical), the net can adapt to the shape of a doubly curved wine bottle53. The holes of the net are able to buffer the local stretching and compression that are required to change the Gaussian curvature, but the individual solid elements of the net generally remain straight and are not buckled.
Key points
•Thinelasticobjectsaremucheasiertobendthantostretchorcompressandthususuallydeformwhilepreservingtheirlength.
•Gauss’sTheorema Egregiumplacessevererestrictionsonthelength-preservingdeformationsthatarepossible.
•Theintroductionofsmall-scalebucklingstructureswithinathinobjectcanenableittoaccessdeformationmodesthatappeartorequirechangesinlength:bucklesbuffertherequiredchangeinlength.
•Small-scalebucklesareoftendesignedinsystemsbutalsoemergenaturallythroughinstabilitiessuchaswrinkling.
•Emergentbucklingstructuresenablechangesincurvature,butinturn,thefinestructureofthebucklingdependsonthiscurvature.
•Bufferingbybucklingisaneffectivemechanismforaccommodatingapparentchangesinlengthbutonlyoperateswhenanobjectisextremelyslenderandsubjecttointermediatetensionsorconfinement.
Gross shapeThe large- scale shape of a thin object, which may be decorated by fine- scale structure such as wrinkles.
www.nature.com/natrevphys
R e v i e w s

In the same way, a network of cuts on a planar sheet enables such sheets to conform to spherical substrates54,55 (Fig. 2b) or, when combined with origami folds, to adopt 3D shapes56–58.
From the perspective of this Review, it is the buckling of the elastic elements that remain after cutting that is of most interest. To demonstrate that removing material also facilitates the bending of the material that remains (the second of the effects mentioned above), we con-sider the swimming of jellyfish59,60. Early- stage larval jellyfish (known as ephyrae) have not yet formed the closed bell of later stages but rather consist of an array of lobes arranged as radial arms surrounding a central disc60. When swimming, these arms are able to bend freely and, at maximal bending, form a bell shape that is almost completely closed (Fig. 2c). The bending of these arms is aided by the lack of any material between them, which would otherwise need to be compressed to main-tain an approximately axisymmetric shape. This same strategy has been used to generate approximately spher-ical shapes from flat sheets, including the fabrication of spherical solar cells61, the encapsulation of a droplet by a naturally flat sheet62 and the transport of water droplets in an elastocapillary pipette63.
Even without removing material, simply introduc-ing cuts increases the freedom of elements to buckle, as illustrated by planar kirigami sheets: when subjected to a uniaxial tension, such sheets respond by tilting and twisting the solid elements that remain64,65. This stretch- induced buckling has been used to create solar cells that are able to tilt and track the Sun with very small changes in the applied lateral strains66 (Fig. 2d) as well as a kirigami skin that enables soft robots to crawl67. Moreover, stretch- induced buckling gives sheets extreme stretchability, an effect that has been termed kirigami- engineered elasticity68. Crucially, in kirigami- engineered elasticity, the material strain remains small throughout most of the structure, enabling relatively
large deformations without damaging the material itself (although small hinge regions may become plastically deformed64). This large macroscopic strain, achieved with small microscopic strain, is ideal for a range of stretchable electronic devices69–75.
Similarly, the introduction of cuts (again without removing material) facilitates the buckling of planar sheets into complex 3D structures through the buckling of the individual elements68. This approach is particu-larly elegantly demonstrated by the creation of elaborate 3D shapes at microscopic scales76,77. In these examples, kirigami patterns are first etched into thin but relatively stiff layers, which are then adhered at selected points to a pre- stretched, soft substrate. When the pre- stretch is released in the soft substrate, the stiff layers suffer a compressive force that is far in excess of their buckling load. These elements therefore buckle out- of-plane and, owing to the imposed cuts, are able to develop intricate gross shapes with Gaussian curvature (Fig. 2e). However, each portion of the shape retains its natural, that is, zero, Gaussian curvature in all but the very small hinges that join different regions. This strategy has recently been developed in two further directions: first, spatial con-trol of this pattern formation can be achieved by local control of the amount of strain that is imposed78, and second, the out- of-plane buckling of helical- shaped interconnects has been found to make the stress within these elements more uniform79,80. Moreover, this variety of form enables buckled structures to be optimized for both their material and electronic properties80.
These examples show how buckling in the remaining elements of kirigami patterns allows for both extreme extensibility and the creation of complex 3D structures, neither of which would have been possible in a simple, uncut sheet. This strategy for buffering by buckling is similar to introducing sacrificial structures at fine scales that buckle when the global structure is compressed. Examples in which such fine- scale structure is deliber-ately designed into a material to facilitate deformation in this way are considered in the following section.
Buckling at designed fine scalesCurvilinear electronics. Similar to the example of kirigami- engineered elasticity, which is useful in stretch-able electronic devices, there has been great success in the manufacture of curvilinear electronic devices81 using buffering by buckling. The development of curvilinear electronics is motivated by the desire to make wearable electronic devices that can conform to doubly curved surfaces, such as finger tips and eyes82–84. The strains required to conform a naturally planar circuit to a curved surface would typically be large enough to cause the failure of brittle electrical conductors such as silicon, which fractures with a strain of ~1%85. To avoid this fail-ure, a polymeric mould is used to create a substrate that is naturally curved but that can be stretched to become planar. Once stretched, a series of silicon islands con-nected by thin interconnects encapsulated in polyimide is deposited on the surface of the substrate; the stretch of the substrate is then released83, at which point the polymeric substrate returns to its curved state and the thin polyimide interconnects detach from the surface,
a b
κ1, κ
2≠0
κ1≠0
κ2
= 0
κ1
= 0
κ2≠0
Fig. 1 | Buckling and buffering by buckling. a | Compressing a card by hand illustrates Euler buckling, in which the card is curved only in a single direction, such that the Gaussian curvature, κ1κ2 (where κ1 and κ2 are the two principal curvatures), remains zero. b | When open, an umbrella is doubly curved (left part), but it appears to undergo a significant change of Gaussian curvature when closed (right part). The excess material generated by the change in curvature is buffered by buckling, in a series of pleats between the ribs of the umbrella. Panel a is courtesy of M. Gomez, University of Cambridge, UK. Panel b is adapted from carlosalvarez/Getty images.
Nature reviews | Physics
R e v i e w s

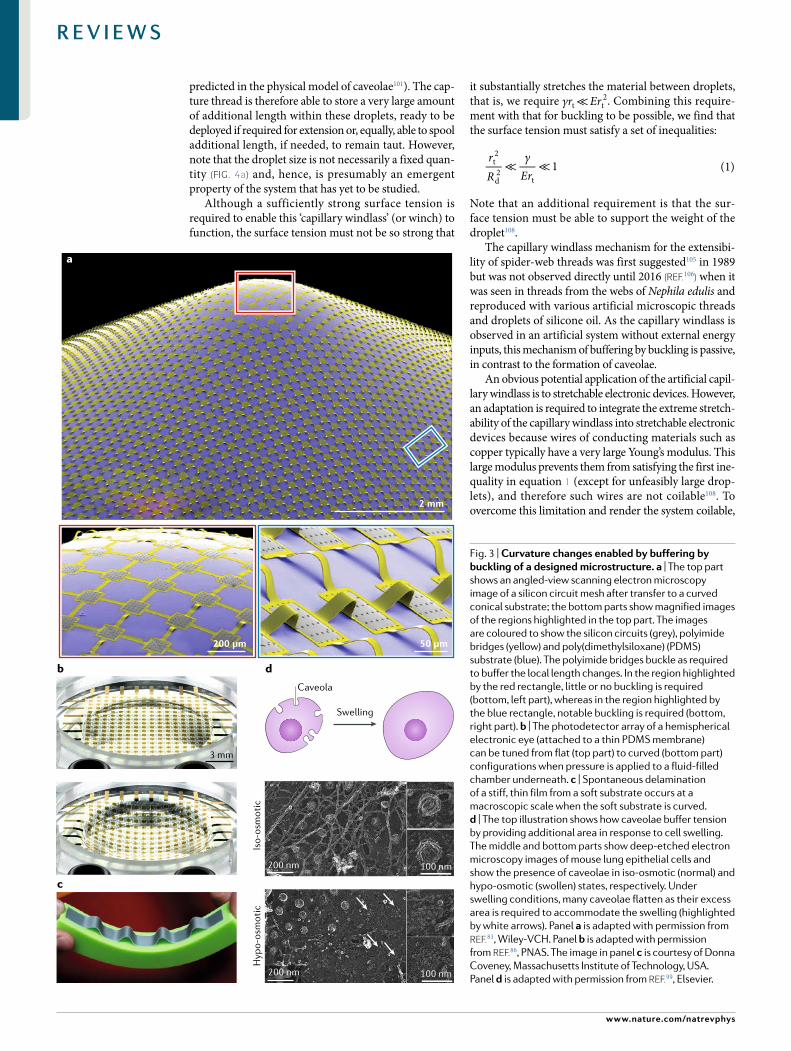
buckling out of the plane to form bridges between the silicon islands (which remain adhered to the curved sub-strate). The role of the polyimide bridges is to buffer the changes in distance between the silicon islands that are caused by the change in Gaussian curvature (Fig. 3a), ena-bling the creation of structures such as a hemispherical eye camera82–84,86.
In this example, geometry dictates the amount of buffering that is required, and the gross 3D shape is con-trolled by the natural shape of the soft substrate. This dependency on the geometry imposed by the substrate distinguishes this application from the above kirigami examples (Fig. 2e), in which a buckled structure forms its own shape based on the cut pattern that is introduced. An elegant feature of buffering by buckling in this exam-ple from curvilinear electronics is that the polyimide bridges automatically respond to the different amounts of buffering required in different locations. Near the pole, the strain is small, and thus the interconnects remain attached to the substrate and do not buckle to form bridges (the region in the red rectangle in Fig. 3a), whereas at the edges of the curved substrate, the strain is larger and therefore the interconnects form large- amplitude buckles83 (the region in the blue rectangle in Fig. 3a). This responsivity of the bridges has the addi-tional advantage that the curvature of the substrate can be subsequently changed; for example, the curvature of a hemispherical eye camera can be adjusted using hydra-ulic pressure (Fig. 3b), enabling an adjustable zoom to be developed for the electronic eye camera84,86.
The buffering by buckling that occurs in curvilinear electronic applications is usually imposed (albeit indi-rectly) by the bridges: a whole bridge element delam-inates from the substrate between two well- adhered
silicon islands, a process that has been called global buckling87, because it is the whole element that buckles. However, if the adhesion between the polyimide element and substrate is sufficiently strong, then a single poly-imide element forms a series of smaller bridges between two silicon islands. This ‘local buckling’87,88 reflects a preferred bridge size that is determined by the physics of the system, specifically by the balance between the bending resistance of the element, the adhesion energy and the substrate mechanics89,90, as can be observed in macroscopic analogues (Fig. 3c). Although the obser-vation of local buckling suggests that it may be possi-ble for buffering by buckling to occur via an emergent structure (discussed below), I am not aware of examples of this emergent buffering by buckling being used in curvilinear electronic devices.
Caveolae. The plasma membrane of cells provides a natural example of a system in which the area changes associated with changes in gross curvature appear to be buffered by buckling in small, but fixed, regions known as caveolae. These regions are invaginations in the plasma membranes of many types of mammalian cells and were observed in some of the first electron micro-scopy studies91,92, being given the name caveolae because of their cave- like appearance.
The biological functions of caveolae are many and varied93–95, but there is increasing experimental evidence that one key role is to maintain a constant membrane tension by providing additional membrane area (that is, to act as a buffer of area) in response to the swelling of the interior of the cell94–96. In particular, when cells are swollen by hypo- osmotic shock, the caveolae flatten97–99 (Fig. 3d). The flattening of caveolae enables the mem-brane to adopt an apparent areal strain of 15% without disruption of the integrity of the membrane. By contrast, in the absence of buffering, membrane disruption would occur for an area increase of only 3%95, and thus areal strains of 15% would not be possible. Furthermore, it is believed that caveolae flattening may also prevent mechanosensitive ion channels from being activated too early (with caveolae, very small changes in cell volume are temporarily tolerated without these ion channels adjusting the cell volume100); for this reason, many ion channels seem to be located within caveolae100.
A simple physical model for the operation of caveolae has been developed101, assuming that caveolae formation is driven by inhomogeneities in membrane composition, which promote the formation of budded regions (the caveolae). This model suggests that the force required to pull a portion of the membrane (in the form of a tether) from the cell should be constant and, furthermore, that the formation and flattening of caveolae both occur through first- order transitions (that is, the transitions are discontinuous, occurring with a finite amplitude). The first- order nature of these transitions in turn sug-gests that regions of flattened caveolae can coexist with unflattened invaginations, as is observed experimentally (Fig. 3d). Although these features of the model agree well with experiments, the mechanism it describes is passive and so should occur without energy input from the cell. By contrast, experiments show that ATP is required for
Box 1 | isometries of thin structures
Thinelasticobjectstypicallydeformisometrically(withoutchanginglength);suchdeformationsmustpreservetheobject’sGaussiancurvature,KG,whichistheproductofthetwoprincipalcurvatures,κ1andκ2.Oneexampleofthisisthecylindricaldeformationofaflatcardwhenbuckled(Fig. 1a).Twocommonexamplesofnon-trivialisometriesarethedevelopablecone(d-cone)foraflatsheet16–20andthemirrorbucklingofanaturallycurvedshell21–24.Ad-conecanberealizedbygentlypushingacircularsheetofpaperintoacylindrical
supportwithapencil(seepanelaofthefigure).Althoughthesheetisclearlydeformed,itremainsuncurvedalongtheradialdirection(itsshapeisageneralizedcone),andhencetheGaussiancurvatureremainsunchangedfromzero.Mirrorbucklingofashellreferstothebucklingthatcanbeobtainedbyreflectingthe
shapeofashellinamirrorandiseasilydemonstratedbyturningasectionofasphere(withradiusR)insideout(seepanelbofthefigure).Inthiscase,thesignofeachoftheprincipalcurvaturesisswitched,buttheirproductremainsthesame.Mirrorbuckling,therefore,leavestheGaussiancurvatureunchanged.
PanelaisadaptedwithpermissionfromreF.20,AmericanPhysicalSociety.PanelbisadaptedwithpermissionfromreF.25,RoyalSocietyPublishing.
κ1
= 1/R
κ2
= 1/R
κ1
= –1/R
κ2
= –1/Rκ
2= 0
κ1≠0
ba
www.nature.com/natrevphys
R e v i e w s
caveolae formation99,102, suggesting instead that caveolae formation is actively controlled at the membrane level. Similar experiments do, however, confirm that the flat-tening of caveolae is passive, as it also occurs in cells in which active cellular processes are inhibited by the depletion of ATP99,102.
Buckling through emergent structureIn the above examples, the buckling of the structures was imposed by some form of design, whether by introducing cuts in kirigami- engineered elasticity or the placement of polyimide interconnects in curvilinear electronics. However, elastic objects are also well known to form regular patterns spontaneously, such as the herringbone wrinkling pattern that is reminiscent of origami pat-terns103,104. It is therefore natural to wonder whether the external design of a fine- scale structure is necessary to obtain buffering by buckling. There are several examples in which the elasticity of an object, combined with addi-tional physics, such as a small applied tension, is enough to ensure that deformations are spontaneously buffered by buckling. These include the threads of certain spi-ders’ webs, in which buffering by buckling gives rise to extreme extensibility (inspiring the development of a 1D capillary windlass) and naturally flat, isotropic sheets that are able to change their gross Gaussian curvature without significant material stretching.
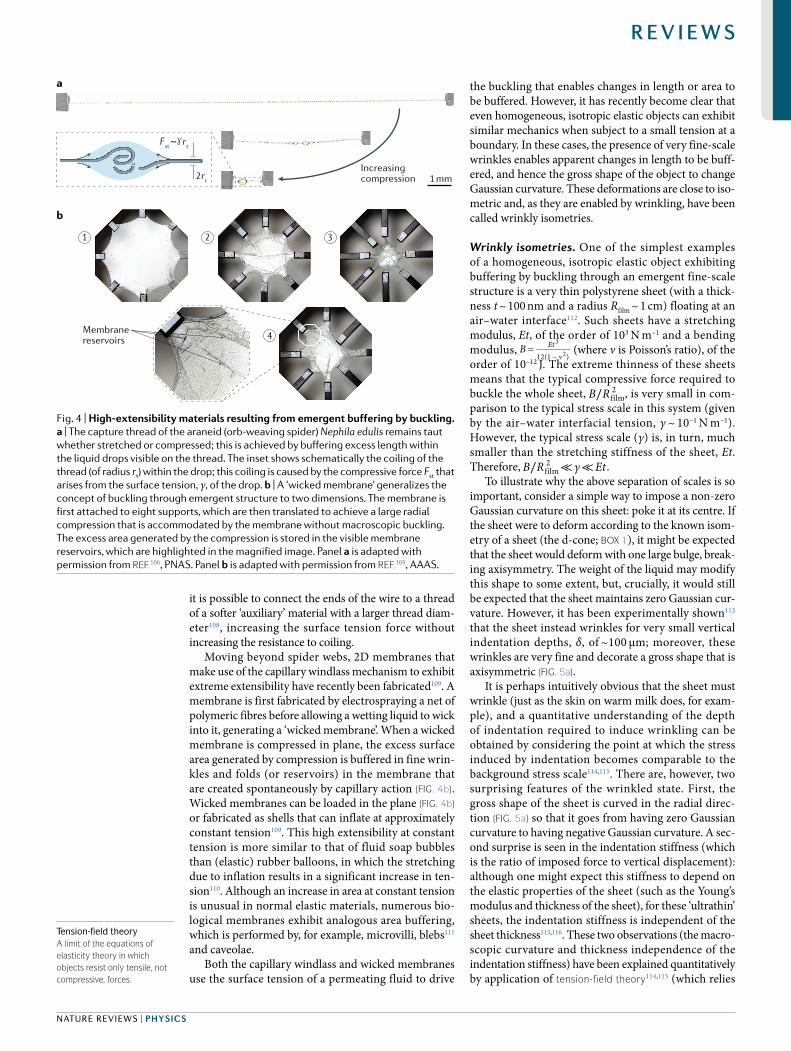
The capillary windlass. The radial and circumferential threads of orb- weaver spiders (or araneids) have very dif-ferent mechanical properties and functions: the radial threads are structural, whereas the circumferential spi-ral threads are ‘capture threads’, which need to be able to absorb the kinetic energy of incoming prey without breaking. To achieve this, the capture threads of ecribel-late spiders are covered in liquid droplets, which stick prey to the web. However, capture threads also have remarka-ble extension properties and do not buckle or sag under compression. Indeed, capture threads have been reported to remain taut down to contractions of 95% of their origi-nal length105,106 (Fig. 4a) and can be stretched to three times their length in the web without breaking106. This remark-able extensibility has been attributed105–107 to the presence of liquid droplets on the very fine threads: the surface tension force on a thread of radius rt from a droplet with a surface tension coefficient of γ and radius Rd scales as Fst ~ γrt (inset of Fig. 4a). This force from surface tension can become substantially larger than the force required to buckle the thread within the droplet, which scales as
~ ∕F Er Rbuckle t4
d2, if ≫ ∕R ( )Er
γd1 2t
3. For thread–drop com-
binations that satisfy this inequality, the droplet surface tension is strong enough to spool any additional thread length within itself, maintaining the tension within the thread at an almost constant value even as the apparent length varies106,107 (this force plateau is reminiscent of that
10 mm 200 µm
2D shape 3D structureSimulation ExperimentDesign
a
b
c
d e
t/Ts= 0.15
1 mm
t/Ts= 0 t/T
s= 0.45 t/T
s= 0.80
Fig. 2 | Elastic deformation facilitated by the removal of material and insertion of cuts. a | A cylindrical wine net is able to change its Gaussian curvature by accommodating area changes in its holey structure. b | A silicone rubber sheet (coated with a thin conducting film) can conform to a spherical substrate (here, a baseball) while still conducting electricity, owing to a series of fractal cuts. c | The swimming stroke of a jellyfish is facilitated by the absence of material between its radial arms. Here, the period of the stroke, Ts, is 0.3 s, and t is the time elapsed since the start of the stroke cycle. d | Image of a solar cell mounted on a polyimide carrier substrate with cuts introduced into it. The solar cell is tilted by the stretching- induced buckling of the substrate, enabling the cell to track the Sun with small changes in the applied strain. e | Examples of 3D structures generated by buckling of a silicon nanomembrane containing cuts. A nanomembrane is initially adhered to a pre- stretched polymer substrate, but when this pre- stretch is released, the nanomembrane detaches except at programmed locations (indicated by the red triangles in the left part), enabling it to buckle in three dimensions. In each case, the cut pattern in the 2D sheet is shown on the left together with the simulated and experimentally observed 3D structure (centre and right, respectively). Panel a is adapted from reF.53, CC- BY-4.0. Panel b is reproduced with permission from reF.54, PNAS. Panel c is adapted from reF.60, Springer Nature Limited. Panel d is adapted from reF.66, CC- BY-4.0. Panel e is adapted with permission from reF.76, PNAS.
Nature reviews | Physics
R e v i e w s
predicted in the physical model of caveolae101). The cap-ture thread is therefore able to store a very large amount of additional length within these droplets, ready to be deployed if required for extension or, equally, able to spool additional length, if needed, to remain taut. However, note that the droplet size is not necessarily a fixed quan-tity (Fig. 4a) and, hence, is presumably an emergent property of the system that has yet to be studied.
Although a sufficiently strong surface tension is required to enable this ‘capillary windlass’ (or winch) to function, the surface tension must not be so strong that
it substantially stretches the material between droplets, that is, we require ≪γr Ert t
2. Combining this require-ment with that for buckling to be possible, we find that the surface tension must satisfy a set of inequalities:
≪ ≪rR
γEr
1 (1)t2
d2
t
Note that an additional requirement is that the sur-face tension must be able to support the weight of the droplet108.
The capillary windlass mechanism for the extensibi-lity of spider- web threads was first suggested105 in 1989 but was not observed directly until 2016 (reF.106) when it was seen in threads from the webs of Nephila edulis and reproduced with various artificial microscopic threads and droplets of silicone oil. As the capillary windlass is observed in an artificial system without external energy inputs, this mechanism of buffering by buckling is passive, in contrast to the formation of caveolae.
An obvious potential application of the artificial capil-lary windlass is to stretchable electronic devices. However, an adaptation is required to integrate the extreme stretch-ability of the capillary windlass into stretchable electronic devices because wires of conducting materials such as copper typically have a very large Young’s modu lus. This large modulus prevents them from satisfying the first ine-quality in equation 1 (except for unfeasibly large drop-lets), and therefore such wires are not coilable108. To overcome this limitation and render the system coilable,
a
b
3 mm
2 mm
50 µm200 µm
c
d
Hyp
o-os
mot
ic
200 nm 100 nm
Iso-
osm
otic
200 nm 100 nm
Swelling
Caveola
Fig. 3 | curvature changes enabled by buffering by buckling of a designed microstructure. a | The top part shows an angled- view scanning electron microscopy image of a silicon circuit mesh after transfer to a curved conical substrate; the bottom parts show magnified images of the regions highlighted in the top part. The images are coloured to show the silicon circuits (grey), polyimide bridges (yellow) and poly(dimethylsiloxane) (PDMS) substrate (blue). The polyimide bridges buckle as required to buffer the local length changes. In the region highlighted by the red rectangle, little or no buckling is required (bottom, left part), whereas in the region highlighted by the blue rectangle, notable buckling is required (bottom, right part). b | The photodetector array of a hemispherical electronic eye (attached to a thin PDMS membrane) can be tuned from flat (top part) to curved (bottom part) configurations when pressure is applied to a fluid- filled chamber underneath. c | Spontaneous delamination of a stiff, thin film from a soft substrate occurs at a macroscopic scale when the soft substrate is curved. d | The top illustration shows how caveolae buffer tension by providing additional area in response to cell swelling. The middle and bottom parts show deep- etched electron microscopy images of mouse lung epithelial cells and show the presence of caveolae in iso- osmotic (normal) and hypo- osmotic (swollen) states, respectively. Under swelling conditions, many caveolae flatten as their excess area is required to accommodate the swelling (highlighted by white arrows). Panel a is adapted with permission from reF.83, Wiley- VCH. Panel b is adapted with permission from reF.86, PNAS. The image in panel c is courtesy of Donna Coveney, Massachusetts Institute of Technology, USA. Panel d is adapted with permission from reF.99, Elsevier.
www.nature.com/natrevphys
R e v i e w s
it is possible to connect the ends of the wire to a thread of a softer ‘auxiliary’ material with a larger thread diam-eter108, increasing the surface tension force without increasing the resistance to coiling.
Moving beyond spider webs, 2D membranes that make use of the capillary windlass mechanism to exhibit extreme extensibility have recently been fabricated109. A membrane is first fabricated by electrospraying a net of polymeric fibres before allowing a wetting liquid to wick into it, generating a ‘wicked membrane’. When a wicked membrane is compressed in plane, the excess surface area generated by compression is buffered in fine wrin-kles and folds (or reservoirs) in the membrane that are created spontaneously by capillary action (Fig. 4b). Wicked membranes can be loaded in the plane (Fig. 4b) or fabricated as shells that can inflate at approximately constant tension109. This high extensibility at constant tension is more similar to that of fluid soap bubbles than (elastic) rubber balloons, in which the stretching due to inflation results in a significant increase in ten-sion110. Although an increase in area at constant tension is unusual in normal elastic materials, numerous bio-logical membranes exhibit analogous area buffering, which is performed by, for example, microvilli, blebs111 and caveolae.
Both the capillary windlass and wicked membranes use the surface tension of a permeating fluid to drive
the buckling that enables changes in length or area to be buffered. However, it has recently become clear that even homogeneous, isotropic elastic objects can exhibit similar mechanics when subject to a small tension at a boundary. In these cases, the presence of very fine- scale wrinkles enables apparent changes in length to be buff-ered, and hence the gross shape of the object to change Gaussian curvature. These deformations are close to iso-metric and, as they are enabled by wrinkling, have been called wrinkly isometries.
Wrinkly isometries. One of the simplest examples of a homogeneous, isotropic elastic object exhibiting buffering by buckling through an emergent fine- scale structure is a very thin polystyrene sheet (with a thick-ness t ~ 100 nm and a radius Rfilm ~ 1 cm) floating at an air–water interface112. Such sheets have a stretching modu lus, Et, of the order of 103 N m–1 and a bending modulus, B = Et
ν12(1 − )
3
2 (where ν is Poisson’s ratio), of the order of 10–12 J. The extreme thinness of these sheets means that the typical compressive force required to buckle the whole sheet, ∕B Rfilm
2 , is very small in com-parison to the typical stress scale in this system (given by the air–water interfacial tension, γ ~ 10–1 N m–1). However, the typical stress scale (γ) is, in turn, much smaller than the stretching stiffness of the sheet, Et. Therefore, ∕ ≪ ≪B R γ Etfilm
2 .To illustrate why the above separation of scales is so
important, consider a simple way to impose a non- zero Gaussian curvature on this sheet: poke it at its centre. If the sheet were to deform according to the known isom-etry of a sheet (the d- cone; Box 1), it might be expected that the sheet would deform with one large bulge, break-ing axisymmetry. The weight of the liquid may modify this shape to some extent, but, crucially, it would still be expected that the sheet maintains zero Gaussian cur-vature. However, it has been experimentally shown113 that the sheet instead wrinkles for very small vertical indentation depths, δ, of ~100 μm; moreover, these wrinkles are very fine and decorate a gross shape that is axisymmetric (Fig. 5a).
It is perhaps intuitively obvious that the sheet must wrinkle (just as the skin on warm milk does, for exam-ple), and a quantitative understanding of the depth of indentation required to induce wrinkling can be obtained by considering the point at which the stress induced by indentation becomes comparable to the background stress scale114,115. There are, however, two surprising features of the wrinkled state. First, the gross shape of the sheet is curved in the radial direc-tion (Fig. 5a) so that it goes from having zero Gaussian curvature to having negative Gaussian curvature. A sec-ond surprise is seen in the indentation stiffness (which is the ratio of imposed force to vertical displacement): although one might expect this stiffness to depend on the elastic properties of the sheet (such as the Young’s modulus and thickness of the sheet), for these ‘ultrathin’ sheets, the indentation stiffness is independent of the sheet thickness113,116. These two observations (the macro-scopic curvature and thickness independence of the indentation stiffness) have been explained quantitatively by application of tension- field theory114,115 (which relies
a
b
Membranereservoirs
Increasingcompression 1 mm
1
4
2 3
2rt
Fst~ r
t
Fig. 4 | high- extensibility materials resulting from emergent buffering by buckling. a | The capture thread of the araneid (orb- weaving spider) Nephila edulis remains taut whether stretched or compressed; this is achieved by buffering excess length within the liquid drops visible on the thread. The inset shows schematically the coiling of the thread (of radius rt) within the drop; this coiling is caused by the compressive force Fst that arises from the surface tension, γ, of the drop. b | A ‘wicked membrane' generalizes the concept of buckling through emergent structure to two dimensions. The membrane is first attached to eight supports, which are then translated to achieve a large radial compression that is accommodated by the membrane without macroscopic buckling. The excess area generated by the compression is stored in the visible membrane reservoirs, which are highlighted in the magnified image. Panel a is adapted with permission from reF.106, PNAS. Panel b is adapted with permission from reF.109, AAAS.
Tension- field theoryA limit of the equations of elasticity theory in which objects resist only tensile, not compressive, forces.
Nature reviews | Physics
R e v i e w s
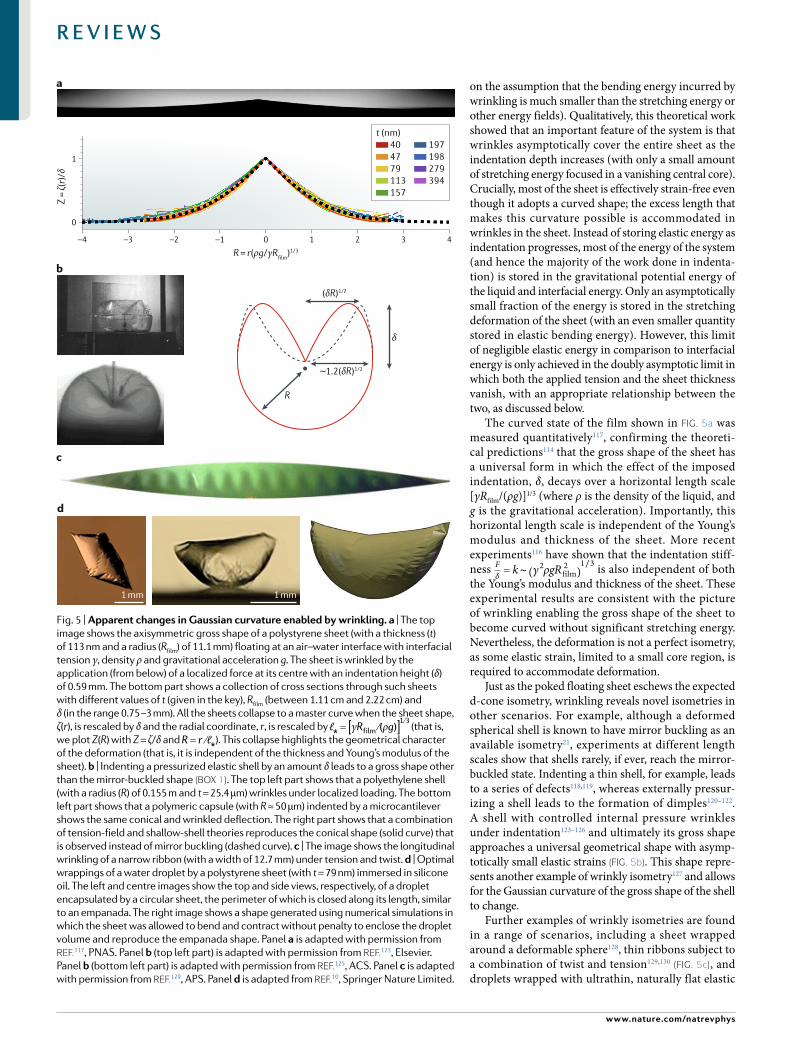
on the assumption that the bending energy incurred by wrinkling is much smaller than the stretching energy or other energy fields). Qualitatively, this theoretical work showed that an important feature of the system is that wrinkles asymptotically cover the entire sheet as the indentation depth increases (with only a small amount of stretching energy focused in a vanishing central core). Crucially, most of the sheet is effectively strain- free even though it adopts a curved shape; the excess length that makes this curvature possible is accommodated in wrinkles in the sheet. Instead of storing elastic energy as indentation progresses, most of the energy of the system (and hence the majority of the work done in indenta-tion) is stored in the gravitational potential energy of the liquid and interfacial energy. Only an asymptotically small fraction of the energy is stored in the stretching deformation of the sheet (with an even smaller quantity stored in elastic bending energy). However, this limit of negligible elastic energy in comparison to interfacial energy is only achieved in the doubly asymptotic limit in which both the applied tension and the sheet thickness vanish, with an appropriate relationship between the two, as discussed below.
The curved state of the film shown in Fig. 5a was measured quantitatively117, confirming the theoreti-cal predictions114 that the gross shape of the sheet has a universal form in which the effect of the imposed indentation, δ, decays over a horizontal length scale [γRfilm/(ρg)]1/3 (where ρ is the density of the liquid, and g is the gravitational acceleration). Importantly, this horizontal length scale is independent of the Young’s modulus and thickness of the sheet. More recent experiments116 have shown that the indentation stiff-ness ~ ∕k γ ρgR= ( )
Fδ
2film2 1 3 is also independent of both
the Young’s modulus and thickness of the sheet. These experimental results are consistent with the picture of wrinkling enabling the gross shape of the sheet to become curved without significant stretching energy. Nevertheless, the deformation is not a perfect isometry, as some elastic strain, limited to a small core region, is required to accommodate deformation.
Just as the poked floating sheet eschews the expected d- cone isometry, wrinkling reveals novel isometries in other scenarios. For example, although a deformed spherical shell is known to have mirror buckling as an available isometry21, experiments at different length scales show that shells rarely, if ever, reach the mirror- buckled state. Indenting a thin shell, for example, leads to a series of defects118,119, whereas externally pressur-izing a shell leads to the formation of dimples120–122. A shell with controlled internal pressure wrinkles under indentation123–126 and ultimately its gross shape approaches a universal geometrical shape with asymp-totically small elastic strains (Fig. 5b). This shape repre-sents another example of wrinkly isometry127 and allows for the Gaussian curvature of the gross shape of the shell to change.
Further examples of wrinkly isometries are found in a range of scenarios, including a sheet wrapped around a deformable sphere128, thin ribbons subject to a combination of twist and tension129,130 (Fig. 5c), and droplets wrapped with ultrathin, naturally flat elastic
a
b
c
d
1 mm 1 mm
R= r(ρg/γRfilm
)1/3
Z=
ζ(r)/
δ
1
0
–4 –3 –2 –1 1 2 3 40
404779113157
197198279394
t (nm)
R
(δR)1/2
~1.2(δR)1/2
δ
Fig. 5 | Apparent changes in Gaussian curvature enabled by wrinkling. a | The top image shows the axisymmetric gross shape of a polystyrene sheet (with a thickness (t) of 113 nm and a radius (Rfilm) of 11.1 mm) floating at an air–water interface with interfacial tension γ, density ρ and gravitational acceleration g. The sheet is wrinkled by the application (from below) of a localized force at its centre with an indentation height (δ) of 0.59 mm. The bottom part shows a collection of cross sections through such sheets with different values of t (given in the key), Rfilm (between 1.11 cm and 2.22 cm) and δ (in the range 0.75 –3 mm). All the sheets collapse to a master curve when the sheet shape, ζ(r), is rescaled by δ and the radial coordinate, r, is rescaled by ℓ γ ρ= ∕ ∕[ ]R g
*( )film
1 3 (that is,
we plot Z(R) with Z = ζ/δ and ℓ= ∕R r*
). This collapse highlights the geometrical character of the deformation (that is, it is independent of the thickness and Young’s modulus of the sheet). b | Indenting a pressurized elastic shell by an amount δ leads to a gross shape other than the mirror- buckled shape (Box 1). The top left part shows that a polyethylene shell (with a radius (R) of 0.155 m and t = 25.4 μm) wrinkles under localized loading. The bottom left part shows that a polymeric capsule (with R ≈ 50 μm) indented by a microcantilever shows the same conical and wrinkled deflection. The right part shows that a combination of tension- field and shallow- shell theories reproduces the conical shape (solid curve) that is observed instead of mirror buckling (dashed curve). c | The image shows the longitudinal wrinkling of a narrow ribbon (with a width of 12.7 mm) under tension and twist. d | Optimal wrappings of a water droplet by a polystyrene sheet (with t = 79 nm) immersed in silicone oil. The left and centre images show the top and side views, respectively, of a droplet encapsulated by a circular sheet, the perimeter of which is closed along its length, similar to an empanada. The right image shows a shape generated using numerical simulations in which the sheet was allowed to bend and contract without penalty to enclose the droplet volume and reproduce the empanada shape. Panel a is adapted with permission from reF.117, PNAS. Panel b (top left part) is adapted with permission from reF.123, Elsevier. Panel b (bottom left part) is adapted with permission from reF.125, ACS. Panel c is adapted with permission from reF.129, APS. Panel d is adapted from reF.10, Springer Nature Limited.
www.nature.com/natrevphys
R e v i e w s

sheets, which form shapes similar to an empanada10,11 (Fig. 5d).
In each of the above examples, a new deformation mode arises because wrinkling gives the elastic sheet or shell an energetically favourable means of buffering the excess length associated with a change in the apparent Gaussian curvature. These new deformation modes are only possible for sheets that can generate very fine wrin-kles and requires the sheet to be highly bendable131. More precisely, the compressive stress required to buckle the sheet over the system size (Rfilm) is ∕B Rfilm
2 , and, thus, if this is significantly smaller than the typical tension within the system (T), the sheet can ‘afford’ to form very fine wrinkles; the condition that quantifies such highly bendable sheets is therefore ∕ ≪B TR( ) 1film
2 . At the same time, the typical strain must be small (so that the sheet does not stretch significantly in the plane), and thus T/(Et) ≪ 1. For both constraints to be satisfied simul-taneously, the tension scale needs to be small (to avoid stretching) but not too small (as this would make the sheet unbendable). The tension must therefore satisfy the twin constraint:
≪ ≪tR
TEt
1 (2)2
film2
In this sense, the new ‘isometric’ state is only attained asymptotically as both the thickness and applied tension shrink to zero; such deformations are therefore referred to as asymptotic isometries114,128,130.
Equation 2 does not explicitly involve the wavelength, λ, of the wrinkles that form; λ is determined by the competition between the bending stiffness of the thin object (which favours large wavelengths) and the stiff-ness of the underlying substrate (which favours small wavelengths)117,132,133. Even in the absence of a physical substrate, a similar resistance to large wavelengths often emerges from either the application of tension along the wrinkles132 or the curvature of the gross shape along the wrinkles117,134. As such, although the gross shape is only able to curve because of the buffering provided by wrinkling, the resulting curvature may itself determine the fine- scale structure of the wrinkling pattern that does the buffering.
Conditions for buffering by buckling. The set of inequal-ities in equation 2 is very similar to those of equation 1 for the capillary windlass: both equations show that the object must be extremely slender and also subject to a small, but not too small, tension for buffering by buck-ling to operate. A question then arises of how broadly these conditions apply. In particular, there has been notable recent interest in the deformation mechanics of atomically thin solids, such as suspended graphene135–138, and therefore we consider when such solids might sat-isfy the inequalities of equation 2. Estimates of the pre- tension in suspended graphene sheets vary, but T is typically in the range of ~0.1 N m–1 (reF.135) together with B ~ 2.3 × 10–19 J (reF.136) and Et ~ 340 N m–1 (reF.135). As such, the requirement of small strains is easily satisfied, T/Et < 10–3, whereas the requirement for high bendabil-ity depends on the horizontal scale over which the sheet
bends: for a typical horizontal scale R ~ 100 nm (reF.137), B/TR2 ~ 2 × 10–4. Therefore, graphene should typically lie in the regime in which buffering by buckling is an acces-sible mechanism; this perhaps explains the unusually curved shapes of graphene nanobubbles7,137,138.
More generally, the key role of the surface tension in equation 1 and the tension in equation 2 suggests that buffering by buckling cannot operate without an applied tension. However, there are examples in which no tension is applied and yet the system approaches an asymptotic isometry, and these are considered briefly below.
Buffering without applied tension. ‘Stamping’ prob-lems, in which an object of one Gaussian curvature is forced to conform to an object with a different Gaussian curvature, provide examples of buffering by buckling in the absence of applied tension139–142. For example, planar sheets (of zero Gaussian curvature) have been forced to conform to spherical substrates139,141, whereas shells of positive Gaussian curvature have been forced to become planar either locally143 or globally140. These geometrically incompatible confinement problems142 differ from the wrinkly isometries discussed above because the strain energy of the centre- line is sub- dominant to the bending energy. This mode of deformation is open to the system for intermediate confinements only; the confinement must be strong enough to force buckling, but if the sys-tem is too confined, the buffering of strain by buckling is suppressed, and the confined object must instead change length142 and thereby develop strain.
Beyond these stamping problems, it seems likely that other examples of instability in deformed shells may exhibit buffering by buckling in the sense dis-cussed in this Review, even without an applied tension. A strong candidate for such a system is the indentation of unpressurized shells, which form a series of polygonal defects118,119 (as seen on poking a table- tennis ball, for example) rather than adopting the mirror buckling that is expected on geometrical grounds21. The prevalence of such a buckling mode suggests that the series of defects that form may lead to a lower elastic energy than the small amount of stretching and bending energy stored in the ridge region required for mirror buckling of a real shell (with non- zero thickness)21. Two key difficulties complicate establishing whether this is, in fact, the case: first, this is an intricate example of geometrically incom-patible confinement because the deformed shape is not known beforehand (in contrast to stamping problems), and second, the absence of internal pressure means that the relevant tension scale is not externally controlled but rather emerges from the elastic problem.
OutlookBuffering by buckling facilitates elastic deformations that would normally require extreme material stretch-ing and hence be unrealizable (particularly deformations that result in changes of Gaussian curvature). A recur-ring theme in these examples is that when a deformation might otherwise be prevented by the energetic cost of changing length, buckling frequently provides a means through which to buffer excess length at lower ener-getic cost; this is the essence of buffering by buckling.
Nature reviews | Physics
R e v i e w s

Similarly, excess material (length or area) can be stored ready to accommodate a sudden stretch, as in the cap-ture threads of spider webs or the caveolae of cell mem-branes. Buffering can take several forms, including the formation of buckles at pre- programmed locations, self- generated wrinkles or small- scale windlasses within droplets. In each case, a key feature is that the system is able to respond dynamically to provide the amount of buffering that is required to almost completely avoid material stretching.
Although buffering mechanisms have been iden-tified in this Review, questions remain regarding the precise microscopic mechanism of buffering in some of the examples considered. For example, although exper-iments have shown that caveolae buffer the apparent change in membrane area induced by osmotic swelling of many cell types, the protein structure involved in their formation is only now being uncovered144. The extent to which this structure facilitates the passive flattening of caveolae has not yet been explored, and the obser-vation that caveolae only re- form in the presence of ATP remains to be understood within a physics- based model. Similarly, the buffering of area changes in wicked membranes is apparent at a macroscopic scale109, but a detailed microscopic picture of how liquid and fibres interact to create the wrinkles and folds that buffer area change is still lacking.
Another key question concerns how buffering by buckling can offer a route for deformation that is energet-ically preferable to traditional isometries such as mirror buckling. Examples of wrinkly isometry have been found to be energetically favourable over traditional isometries
because of the energy saved by not storing energy in an external (non- elastic) energy. However, without these external fields, it is unclear how the deformation mode opened up by buckling can be energetically favourable. These problems are a fertile ground for the application of recent theoretical developments142 and could include the development of analogues of equations 1 and 2 to describe when buffering by buckling can occur with only emergent (rather than externally applied) tensions.
The examples discussed in this Review have sev-eral close relatives in other systems; for example, the bendy straw mechanism145 is able to achieve multiple, convoluted states by buffering extra length in a multi-stable bellows, whereas origami patterns can attain gross shapes with Gaussian curvature by buffering excess area through changes of angle in individual folds68,146–148. Similarly, other biological systems are suggestive of some of the same principles of buffering by buckling. For example, the crimping of collagen fibres in skin is believed to enable them to stretch and reduce the likelihood of tearing (along with other mechanisms, including rotation, sliding and delamination)149. How these scenarios fit within the categories of buffering by buckling described in this Review and the relevance of conditions such as equations 1 and 2 require further exploration of the underlying mechanisms. Similarly, these and other examples in nature may well reveal additional mechanisms of buffering by buckling that can be exploited in applications such as stretchable electronics.
Published online xx xx xxxx
1. Atwater, H. A. et al. Materials challenges for the Starshot lightsail. Nat. Mater. 17, 861–867 (2018).
2. Novoselov, K. S., Mishchenko, A., Carvalho, A. & Castro- Neto, A. H. 2D materials and van der Waals heterostructures. Science 353, aac9439 (2016).
3. Reis, P. M. A perspective on the revival of structural (in)stability with novel opportunities for function: from buckliphobia to buckliphilia. J. Appl. Mech. 82, 111001 (2015).
4. Kim, J. B. et al. Wrinkles and deep folds as photonic structures in photovoltaics. Nat. Photonics 6, 327–332 (2012).
5. Harrison, C., Stafford, C. M., Zhang, W. & Karim, A. Sinusoidal phase grating created by a tunably buckled surface. Appl. Phys. Lett. 85, 4016 (2004).
6. Guinea, F., Katsnelson, M. I. & Geim, A. K. Energy gaps and a zero- field quantum Hall effect in graphene by strain engineering. Nat. Phys. 6, 30–33 (2010).
7. Levy, N. et al. Strain- induced pseudo- magnetic fields greater than 300 tesla in graphene nanobubbles. Science 329, 544–547 (2010).
8. Baek, C., Sageman- Furnas, A. O., Jawed, M. K. & Reis, P. M. Form finding in elastic gridshells. Proc. Natl Acad. Sci. USA. 115, 75–80 (2017).
9. Pikul, J. H. et al. Stretchable surfaces with programmable 3D texture morphing for synthetic camouflaging skins. Science 358, 210–214 (2017).
10. Paulsen, J. D. et al. Optimal wrapping of liquid droplets with ultrathin sheets. Nat. Mater. 14, 1206–1209 (2015).
11. Kumar, D., Paulsen, J. D., Russell, T. P. & Menon, N. Wrapping with a splash: high- speed encapsulation with ultrathin sheets. Science 359, 775–778 (2018).
12. Liu, P. et al. Autoperforation of 2D materials for generating two- terminal memristive Janus particles. Nat. Mater. 17, 1005–1012 (2018).
13. Landau, L. D. & Lifschitz, E. M. Theory of Elasticity 2nd edn, Ch. 2 (Pergamon, 1970).
14. Rayleigh, J. W. S. The Theory of Sound Vol. 1, 396 (Dover, 1945).
15. Wilson, P. M. H. Curved Spaces: From Classical Geometries to Elementary Differential Geometry 155 (Cambridge Univ. Press, 2008).
16. Ben Amar, M. & Pomeau, Y. Crumpled paper. Proc. R. Soc. A 453, 729–755 (1997).
17. Chaieb, S. & Melo, F. Experimental study of developable cones. Phys. Rev. Lett. 80, 2354–2357 (1998).
18. Cerda, E. & Mahadevan, L. Conical surfaces and crescent singularities in crumpled sheets. Phys. Rev. Lett. 80, 2358–2361 (1998).
19. Cerda, E., Chaieb, S., Melo, F. & Mahadevan, L. Conical dislocations in crumpling. Nature 401, 46–50 (1999).
20. Efrati, E., Pocivavsek, L., Meza, R., Lee, K. Y. C. & Witten, T. A. Confined disclinations: exterior versus material constraints in developable thin elastic sheets. Phys. Rev. E 91, 022404 (2015).
21. Pogorelov, A. V. Bending of Surfaces and Stability of Shells (American Mathematical Society, 1988).
22. Neek- Amal, M. et al. Thermal mirror buckling in freestanding graphene locally controlled by scanning tunnel microscopy. Nat. Commun. 5, 4962 (2014).
23. Bende, N. P. et al. Geometrically controlled snapping transitions in shells with curved creases. Proc. Natl Acad. Sci. USA. 112, 11175–11180 (2015).
24. Gomez, M., Moulton, D. E. & Vella, D. The shallow shell approach to ‘Pogorelov’s problem’ and the breakdown of ‘mirror buckling’. Proc. R. Soc. A 472, 20150732 (2016).
25. Taffetani, M., Jiang, X., Holmes, D. P. & Vella, D. Static bistability of spherical caps. Proc. R. Soc. A 474, 20170910 (2018).
26. Liang, T. & Witten, T. A. Crescent singularities in crumpled sheets. Phys. Rev. E. 71, 016612 (2005).
27. Witten, T. A. Stress focusing in elastic sheets. Rev. Mod. Phys. 79, 643–675 (2007).
28. Barois, T., Tadrist, L., Quilliet, C. & Forterre, Y. How a curved elastic strip opens. Phys. Rev. Lett. 113, 214301 (2014).
29. Fuentealba, J. F., Albarrán, O., Hamm, E. & Cerda, E. Transition from isometric to stretching ridges. Phys. Rev. E. 91, 032407 (2015).
30. Guven, J., Hanna, J. A., Kahraman, O. & Müller, M. M. Dipoles in thin sheets. Eur. Phys. J. E 36, 106 (2013).
31. Gottesman, O., Efrati, E. & Rubinstein, S. M. Furrows in the wake of propagating ‘d’-cones. Nat. Commun. 6, 7232 (2015).
32. Hamm, E., Reis, P. M., Le Blanc, M., Roman, B. & Cerda, E. Tearing as a test for mechanical characterization of thin adhesive films. Nat. Mater. 7, 386–390 (2008).
33. Lindahl, N. et al. Determination of the bending rigidity of graphene via electrostatic actuation of buckled membranes. Nano Lett. 12, 3526–3531 (2012).
34. Liang, H. & Mahadevan, L. The shape of a long leaf. Proc. Natl Acad. Sci. USA 106, 22049–22054 (2009).
35. Liang, L. & Mahadevan, L. Growth, geometry and mechanics of a blooming lily. Proc. Natl Acad. Sci. USA 108, 5516–5521 (2011).
36. Chirat, R., Moulton, D. E. & Goriely, A. The mechanical basis of morphogenesis and convergent evolution of spiny seashells. Proc. Natl Acad. Sci. USA 110, 6015–6020 (2013).
37. Goriely, A. The Mathematics and Mechanics of Biological Growth Ch. 10 (Springer, 2017).
38. Huang, C., Wang, Z., Quinn, D., Suresh, S. & Hsia, K. J. Differential growth and shape formation in plant organs. Proc. Natl Acad. Sci. USA 115, 12359–12364 (2018).
39. Klein, Y., Efrati, E. & Sharon, E. Shaping of elastic sheets by prescription of non- Euclidean metrics. Science 315, 1116–1120 (2007).
40. Na, J.-H. et al. Programming reversibly self- folding origami with micropatterned photo- crosslinkable polymer trilayers. Adv. Mater. 27, 79–85 (2015).
41. Gladman, A. S., Matsumoto, E. A., Nuzzo, R. G., Mahadevan, L. & Lewis, J. A. Biomimetic 4D printing. Nat. Mater. 15, 413–418 (2016).
42. Aharoni, H., Xia, Y., Zhang, X., Kamien, R. D. & Yang, S. Universal inverse design of surfaces with thin nematic elastomer sheets. Proc. Natl Acad. Sci. USA 115, 7206–7211 (2018).
43. Kowalski, B. A., Mostajeran, C., Godman, N. P., Warner, M. & White, T. J. Curvature by design and on
www.nature.com/natrevphys
R e v i e w s
demand in liquid crystal elastomers. Phys. Rev. E 97, 012504 (2018).
44. Hippler, M. et al. Controlling the shape of 3D microstructures by temperature and light. Nat. Comm. 10, 232 (2019).
45. Shepherd, R. F. et al. Multigait soft robot. Proc. Natl Acad. Sci. USA 108, 20400–20403 (2011).
46. Siéfert, E., Reyssat, E., Bico, J. & Roman, B. Bio- inspired pneumatic shape- morphing elastomers. Nat. Mater. 18, 24–28 (2018).
47. Dervaux, J. & Ben Amar, M. Morphogenesis of growing soft tissues. Phys. Rev. Lett. 101, 068101 (2008).
48. Müller, M. M., Ben Amar, M. & Guven, J. Conical defects in growing sheets. Phys. Rev. Lett. 101, 156104 (2008).
49. van Rees, W. M., Vouga, E. & Mahadevan, L. Growth patterns for shape- shifting elastic bilayers. Proc. Natl Acad. Sci. USA 114, 11597–11602 (2017).
50. Cerda, E., Mahadevan, L. & Pasini, J. M. The elements of draping. Proc. Natl Acad. Sci. USA 101, 1806–1810 (2004).
51. Paulsen, J. D. Wrapping liquids, solids and gases in thin sheets. Annu. Rev. Cond. Matter Phys. 10, 431–450 (2019).
52. Badalucco, L. Kirigami: The Art of 3-Dimensional Paper Cutting (Sterling, 2000).
53. Isobe, M. & Okumura, K. Initial rigid response and softening transition of highly stretchable kirigami sheet materials. Sci. Rep. 6, 24758 (2016).
54. Cho, Y. et al. Engineering the shape and structure of materials by fractal cut. Proc. Natl Acad. Sci. USA 111, 17390–17395 (2014).
55. Konacovic, M. et al. Beyond developable: computational design and fabrication with auxetic materials. ACM Trans. Graph. 35, 89 (2016).
56. Castle, T. et al. Making the cut: lattice kirigami rules. Phys. Rev. Lett. 113, 245502 (2014).
57. Sussman, D. M. et al. Algorithmic lattice kirgiami: a route to pluripotent materials. Proc. Natl Acad. Sci. USA 112, 7449–7453 (2015).
58. Castle, T., Sussman, D. M., Tanis, M. & Kamien, R. D. Additive lattice kirigami. Sci. Adv. 2, e1601258 (2016).
59. Gladfelter, W. G. A comparative analysis of the locomotory systems of medusoid Cnidaria. Helgol. Wiss. Meeresunters. 25, 228–272 (1973).
60. Nawroth, J. C. et al. A tissue- engineered jellyfish with biomimetic propulsion. Nat. Biotechnol. 30, 792–797 (2012).
61. Guo, X. et al. Two- and three- dimensional folding of thin film single- crystalline silicon for photovoltaic power applications. Proc. Natl Acad. Sci. USA 106, 20149–20154 (2009).
62. Py, C. et al. Capillary origami: spontaneous wrapping of a droplet with an elastic sheet. Phys. Rev. Lett. 98, 156103 (2007).
63. Reis, P. M., Hure, J., Jung, S., Bush, J. W. M. & Clanet, C. Grabbing water. Soft Matter 6, 5705–5708 (2010).
64. Rafsanjani, A. & Bertoldi, K. Buckling- induced kirigami. Phys. Rev. Lett. 118, 084301 (2017).
65. Yang, Y., Dias, M. A. & Holmes, D. P. Multistable kirigami for tunable architected materials. Phys. Rev. Mater. 2, 110601 (2018).
66. Lamoureux, A., Lee, K., Shlian, M., Forrest, S. R. & Shtein, M. Dynamic kirigami structures for integrated solar tracking. Nat. Commun. 6, 8092 (2015).
67. Rafsanjani, A., Zhang, Y., Liu, B., Rubinstein, S. M. & Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 3, eaar7555 (2018).
68. Callens, S. J. P. & Zadpoor, A. A. From flat sheets to curved geometries: origami and kirigami approaches. Mater. Today 21, 241–264 (2018).
69. Lacour, S. P., Chan, D., Wagner, S., Li, T. & Suo, Z. Mechanisms of reversible stretchability of thin metal films on elastomeric substrates. Appl. Phys. Lett. 88, 204103 (2006).
70. Blees, M. K. et al. Graphene kirigami. Nature 524, 204–207 (2015).
71. Gerratt, A. P., Michaud, H. O. & Lacour, S. P. Elastomeric electronic skin for prosthetic tactile sensation. Adv. Func. Mater. 25, 2287–2295 (2015).
72. Minev, I. R. et al. Electronic dura mater for long- term multimodal neural interfaces. Science 347, 159–163 (2015).
73. Shyu, T. C. et al. A kirigami approach to engineering elasticity in nanocomposites through patterned defects. Nat. Mater. 14, 785–789 (2015).
74. Ning, X. et al. Assembly of advanced materials into 3D functional structures by methods inspired by origami and kirigami: a review. Adv. Mater. Interfaces 5, 1800284 (2018).
75. Xu, R. et al. Kirigami- inspired highly stretchable micro- supercapacitor patches fabricated by laser conversion and cutting. Microsyst. Nanoeng. 4, 36 (2018).
76. Zhang, Y. et al. A mechanically driven form of Kirigami as a route to 3D mesostructures in micro/nanomembranes. Proc. Natl Acad. Sci. USA 112, 11757–11764 (2015).
77. Zhang, Y. et al. Printing, folding and assembly methods for forming 3D mesostructures in advanced materials. Nat. Rev. Mater. 2, 17019 (2017).
78. Nan, K. et al. Engineered elastomer substrates for guided assembly of complex 3D mesostructures by spatially nonuniform compressive buckling. Adv. Funct. Mater. 27, 1604281 (2017).
79. Xu, S. et al. Assembly of micro/nanomaterials into complex, three- dimensional architectures by compressive buckling. Science 347, 154–159 (2015).
80. Jang, K.-I. et al. Self- assembled three- dimensional network designs for soft electronics. Nat. Commun. 8, 15894 (2017).
81. Rogers, J. A., Someya, T. & Huang, Y. Materials and mechanics for stretchable electronics. Science 327, 1603–1607 (2010).
82. Ko, H. C. et al. A hemispherical electronic eye camera based on compressible silicon optoelectronics. Nature 454, 748–753 (2008).
83. Ko, H. C. et al. Curvilinear electronics formed using silicon membrane circuits and elastomeric transfer elements. Small 5, 2703–2709 (2009).
84. Song, Y. M. et al. Digital cameras with designs inspired by the arthropod eye. Nature 497, 95–99 (2013).
85. Park, S.-I. et al. Theoretical and experimental studies of inorganic metals on plastic substrates. Adv. Func. Mater. 18, 2673–2684 (2008).
86. Jung, I. et al. Dynamically tunable hemispherical electronic eye camera system with adjustable zoom capability. Proc. Natl Acad. Sci. USA 108, 1788–1793 (2011).
87. Wang, S. et al. Mechanics of curvilinear electronics. Soft Matter 6, 5757–5763 (2010). Presents detailed modelling of curvilinear electronics, including the determination of conditions for local versus global buckling.
88. Sun, Y., Choi, W. M., Jiang, H., Huang, Y. Y. & Rogers, J. A. Controlled buckling of semiconductor nanoribbons for stretchable electronics. Nat. Nanotechnol. 1, 201–207 (2006).
89. Vella, D., Bico, J., Boudaoud, A., Roman, B. & Reis, P. M. The macroscopic delamination of thin films from elastic substrates. Proc. Natl Acad. Sci. USA 106, 10901–10906 (2009).
90. Nolte, A. J., Chung, J. Y., Davis, C. S. & Stafford, C. M. Wrinkling- to-delamination transition in thin polymer films on compliant substrates. Soft Matter 13, 7930–7937 (2017).
91. Palade, G. E. Fine structure of blood capillaries. J. Appl. Phys. 24, 1424 (1953).
92. Yamada, E. The fine structure of the gall bladder epithelium of the mouse. J. Biophys. Biochem. Cytol. 1, 445–458 (1955).
93. Parton, R. G. & Simons, K. The multiple faces of caveolae. Nat. Rev. Mol. Cell Biol. 8, 185–194 (2007).
94. Parton, R. G. & del Pozo, M. A. Caveolae as plasma membrane sensors, protectors and organisers. Nat. Rev. Cell. Biol. 14, 98–112 (2013).
95. Parton, R. G., Tillu, V. A. & Collins, B. M. Caveolae. Curr. Biol. 28, R402–R405 (2018).
96. Nassoy, P. & Lamaze, C. Stressing caveolae new role in cell mechanics. Trends Cell Biol. 22, 381–389 (2012). Discusses the importance of the flattening of caveolae in the buffering of membrane tension.
97. Dulhunty, A. F. & Franzini- Armstrong, C. The relative contributions of the folds and caveolae to the surface membrane of frog skeletal muscle fibres at different sarcomere lengths. J. Physiol. 250, 513–539 (1975).
98. Prescott, L. & Brightman, M. W. The sarcolemma of Aplysia smooth muscle in freeze- fracture preparations. Tissue Cell. 8, 241–258 (1976).
99. Sinha, B. et al. Cells respond to mechanical stress by rapid disassembly of Caveolae. Cell 144, 402–413 (2011).
100. Kozera, L., White, E. & Callaghan, S. Caveolae act as membrane reserves which limit mechanosensitive ICl,swell channel activation during swelling in the rat ventricular myocyte. PLoS One 4, e8312 (2009).
101. Sens, P. & Turner, M. S. Budded membrane microdomains as tension regulators. Phys. Rev. E 73, 031918 (2006).
102. Mayor, S. Need tension relief fast? Try caveolae. Cell 144, 323–324 (2011).
103. Mahadevan, L. & Rica, S. Self- organized origami. Science 307, 1740 (2005).
104. Audoly, B. & Boudaoud, A. Buckling of a stiff film bound to a compliant substrate. Part III: herringbone solutions at large buckling parameter. J. Mech. Phys. Solids 56, 2444–2458 (2008).
105. Vollrath, F. & Edmonds, D. T. Modulation of the mechanical properties of spider silk by coating with water. Nature 340, 304–307 (1989).
106. Elettro, H., Neukirch, S., Vollrath, F. & Antkowiak, A. In- drop capillary spooling of spider capture thread inspires hybrid fibers with mixed solid- liquid mechanical properties. Proc. Natl Acad. Sci. USA 113, 6143 (2016).
107. Elettro, H., Vollrath, F., Antkowiak, A. & Neukirch, S. Coiling of an elastic beam inside a disk: a model for spider- capture silk. Int. J. Nonlin. Mech. 75, 59–66 (2015).
108. Grandgeorge, P., Antkowiak, A. & Neukirch, S. Auxiliary soft beam for the amplification of elasto- capillary coiling: towards stretchable electronics. Adv. Colloid Interf. Sci. 225, 2–9 (2018).
109. Grandgeorge, P. et al. Capillarity- induced folds fuel extreme shape changes in thin wicked membranes. Science 360, 296 (2018). Introduces buffering of area in wicked membranes.
110. Müller, I. & Strehlow, P. Rubber and Rubber Balloons (Springer, 2004)
111. Erikson, C. A. & Trinkhaus, J. P. Microvilli and blebs as sources of reserve surface membrane during cell spreading. Exp. Cell Res. 99, 375–384 (1976).
112. Huang, J. et al. Capillary wrinkling of floating thin polymer films. Science 317, 650–653 (2012).
113. Holmes, D. P. & Crosby, A. J. Draping films: a wrinkle to fold transition. Phys. Rev. Lett. 105, 038303 (2010).
114. Vella, D., Huang, J., Menon, N., Russell, T. P. & Davidovitch, B. Indentation of ultrathin elastic films and the emergence of asymptotic isometry. Phys. Rev. Lett. 114, 104301 (2015).
115. Vella, D. & Davidovitch, B. Regimes of wrinkling in an indented floating elastic sheet. Phys. Rev. E 98, 013003 (2018).
116. Ripp, M. M., Démery, V., Zhang, T. & Paulsen, J. D. Geometry underlies the mechanical stiffening and softening of thin sheets. Preprint at https://arxiv.org/abs/1804.02421 (2018).
117. Paulsen, J. D. et al. Curvature- induced stiffness and the spatial variation of wavelength in wrinkled sheets. Proc. Natl Acad. Sci. USA 113, 1144 (2016).
118. Vaziri, A. & Mahadevan, L. Localized and extended deformations of elastic shells. Proc. Natl Acad. Sci. USA 105, 7913–7918 (2008). A detailed numerical study of the breakdown of mirror buckling in indented shells.
119. Vaziri, A. Mechanics of highly deformed elastic shells. Thin Wall. Struct. 47, 692–700 (2009).
120. Datta, S. S. et al. Delayed buckling and guided folding of inhomogeneous capsules. Phys. Rev. Lett. 109, 134302 (2012).
121. Knoche, S. & Kierfeld, J. The secondary buckling transition: wrinkling of buckled spherical shells. Eur. Phys. J. E 37, 62 (2014).
122. Hutchinson, J. W. & Thompson, J. M. T. Nonlinear buckling behaviour of spherical shells: barriers and symmetry- breaking dimples. Philos. Trans. R. Soc. A 375, 20160154 (2017).
123. Szyszkowski, W. & Glockner, P. G. Spherical membranes subject to vertical concentrated loads: an experimental study. Eng. Struct. 9, 183–192 (1987).
124. Li, X. & Steigmann, D. J. Point loads on a hemispherical elastic membrane. Int. J. Nonlin. Mech. 30, 569–581 (1995).
125. Gordon, V. D. et al. Self- assembled polymer membrane capsules inflated by osmotic pressure. J. Am. Chem. Soc. 126, 14117–14122 (2004).
126. Vella, D., Ajdari, A., Vaziri, A. & Boudaoud, A. Wrinkling of pressurized elastic shells. Phys. Rev. Lett. 107, 174301 (2011).
127. Vella, D., Ebrahimi, H., Vaziri, A. & Davidovitch, B. Wrinkling reveals a new isometry of pressurized elastic shells. EPL 112, 24007 (2015).
128. Hohlfeld, E. & Davidovitch, B. Wrinkle patterns on a sphere: wrinkle patterns suppress curvature- induced delamination. Phys. Rev. E 91, 012407 (2015). Provides a detailed analysis of the asymptotic state of a flat sheet adhered to a soft sphere and how wrinkling enables the sheet to avoid strain.
129. Chopin, J. & Kudrolli, A. Helicoids, loops and wrinkles in twisted ribbons. Phys. Rev. Lett. 111, 174302 (2013).
130. Chopin, J., Démery, V. & Davidovitch, B. Roadmap to the morphological instabilities of a stretched twisted ribbon. J. Elast. 119, 137–189 (2015).
Nature reviews | Physics
R e v i e w s
131. Davidovitch, B., Schroll, R. D., Vella, D., Adda- Bedia, M. & Cerda, E. A prototypical model for tensional wrinkling in thin sheets. Proc. Natl Acad. Sci. USA 108, 18227–18232 (2011).
132. Cerda, E. & Mahadevan, L. Geometry and physics of wrinkling. Phys. Rev. Lett. 90, 074302 (2003).
133. Stafford, C. M. et al. A buckling- based metrology for measuring the elastic moduli of polymeric thin films. Nat. Mater. 3, 545–550 (2004).
134. Taffetani, M. & Vella, D. Regimes of wrinkling in pressurized elastic shells. Philos. Trans. R. Soc. A 375, 20160330 (2017).
135. Lee, C., Wei, X., Kysar, J. W. & Hone, J. Measurement of the elastic properties and intrinsic strength of monolayer graphene. Science 321, 385–388 (2008).
136. Lu, Q., Arroyo, M. & Huang, R. Elastic bending modulus of monolayer graphene. J. Phys. D. 42, 102002 (2009).
137. Khestanova, E., Guinea, F., Fumagalli, L., Geim, A. K. & Grigorieva, I. V. Universal shape and pressure inside bubbles appearing in van der Waals heterostructures. Nat. Commun. 7, 12587 (2016).
138. Ghorbanfekr- Kalashami, H., Vasu, K. S., Nair, R. R., Peeters, F. M. & Neek- Amal, M. Dependence of the
shape of graphene nanobubbles on trapped substance. Nat. Commun. 8, 15844 (2017).
139. Hure, J., Roman, B. & Bico, J. Stamping and wrinkling of elastic plates. Phys. Rev. Lett. 109, 054302 (2012).
140. Aharoni, H. et al. The smectic order of wrinkles. Nat. Commun. 8, 15809 (2017).
141. Mitchell, N. P. et al. Conforming nanoparticle sheets to surfaces with Gaussian curvature. Soft Matter 14, 9107–9117 (2018).
142. Davidovitch, B., Sun, Y. & Grason, G. M. Geometrically incompatible confinement of solids. Proc. Natl Acad. Sci. USA 116, 1483–1488 (2019). Discusses how a thin flat sheet can adopt a curved gross shape even in the absence of applied tension.
143. Ebrahimi, H., Ajdari, A., Vella, D., Boudaoud, A. & Vaziri, A. Anisotropic blistering instability of highly ellipsoidal shells. Phys. Rev. Lett. 112, 094302 (2014).
144. Stoeber, M. et al. Model for the architecture of caveolae based on a flexible, net- like assembly of Cavin1 and Caveolin discs. Proc. Natl Acad. Sci. USA 113, E8069–E8078 (2016).
145. Bende, N. P. et al. Overcurvature induced multistability of linked conical frusta: how a ‘bendy straw’ holds its shape. Soft Matter 14, 8636–8642 (2018).
146. Seffen, K. A. Compliant shell mechanisms. Philos. Trans. R. Soc. A 370, 2010–2026 (2012).
147. Schenk, M. & Guest, S. D. Geometry of Miura- folded materials. Proc. Natl Acad. Sci. USA 110, 3276–3281 (2013).
148. Dudte, L. H., Vouga, E., Tachi, T. & Mahadevan, L. Programming curvature using origami tessellations. Nat. Mater. 15, 583–588 (2016).
149. Yang, W. et al. On the tear resistance of skin. Nat. Commun. 6, 6649 (2015).
AcknowledgementsThe author thanks B. Davidovitch and A. Goriely for various discussions and B. Davidovitch, M. Liu and J. Paulsen for comments on an earlier version of this Review. This work is supported by funding from the Leverhulme Trust through a Philip Leverhulme Prize.
Competing interestsThe author declares no competing interests.
Publisher’s noteSpringer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
www.nature.com/natrevphys
R e v i e w s





























