Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL OF SPORT BIOMECHANICS, 1988, 4, 326-341
Biomechanical Model of the Press Handstand in Gymnastics
Spiros G. Prassas
A biomechanicd model of the press handstand was developed to evaluate and predict the shoulder joint torque requirements as well as the motion of a gymnast's center of mass (CM) from an initial to a final (handstand) posi- tion. Five press handstands executed by gymnasts of differing abilities were filmed and analyzed. The results were compared to the predicted parameters of simulated presses. It was found that execution of the skill with fewer fluc- tuations in trunk and lower extremities angular velocity-a characteristic of skilled performance-required smoother and at times larger shoulder joint torques. Reduction of the hip joint angle by only 5 or 10" did not substan- tially reduce the shoulder joint torque requirements. Regarding CM motion, it was found that during performance the CM continuously elevated and re- mained close to a vertical line passing through the center of the wrist joint. All gymnasts, however, were found to be leaning slightly backward during the first part of the movement and slightly forward during the later phases. Modifications in wrist joint angle required to maintain each gymnast's CM precisely above the center of the wrist joint were investigated.
With the exception of vaulting in which performance consists of a single movement, competition in all gymnastic events requires execution of a routine composed of a series of individual skills. In creating their optional routine, gym- nasts can choose among the great number of already existing movements or they can develop their own. However, rules set by the sports-governing body require that a press handstand must be included in rings, floor exercises, and parallel bar routines (International Gymnastics Federation, code of points, 1985). Thus, classification of the skill as fundamental is justifiable.
A press handstand is a gymnastic term referring to the slow and controlled elevation of a gymnast's body from an initial stationary position to a handstand position. The body configuration between initial and final positions can vary, mak- ing certain variations of the skill more difficult than others. However, accom- plishment of any variation requires a continuous change in body configuration brought about by muscular torques acting at the wrist, shoulder, and hip joints.
Spiros G. Prassas is with the Department of Exercise and Sport Science at Colorado State University, Fort Collins, CO 80523.
326

HANDSTAND IN GYMNASTICS 32 7
Among those torques, the one acting at the shoulder joint is of paramount practi- cal importance. The hip joint extensors are quite powerful and capable of gener- ating the necessary moment during the press, regardless of limb positioning, whereas the wrist joint torques are small, especially when the body's center of mass (CM) is above the gymnast's hands (Prassas, 1985; Prassas, Kelley, & Pike, 1986).
Although handstands in general and press handstands in particular are frequently discussed qualitatively in gymnastics books (Brown, 1980; Faria, 1972; Fukushima & Russel, 1980; Puchet, 1979), related quantitative research consists of a single study. Prassas et al. (1986) investigated the relationship between shoul- der joint strength, hip joint flexibility, and timing to the straight amlflexed hips press handstand on the parallel bars. They concluded that increased levels of shoul- der joint strength at the later stages of shoulder joint flexion might be one of the prerequisites for proper execution of the skill, and that utilization of and increase in existing hip joint flexibility could reduce the demands placed upon the shoul- der joint musculature.
The purpose of this study was to develop a biomechanical model of the press handstand that could evaluate and predict shoulder joint torque requirements and motion of the gymnast's CM. The model could then be utilized to answer the following questions: What shoulder joint torques are required to complete the movement as smoothly as possible? How does greater hip joint flexion affect those torques? What movement modifications are required to maintain the gym- nast's CM above the base of support (wrist joint center) from the beginning to the end of the skill?
The Model
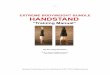
In this study, the human body was modeled as a planar, three pin-connected rigid link system. Links 1, 2, and 3 represented the upper extremities, trunk (includ- ing head and neck), and lower extremity segments, respectively. Figure 1 presents
F i e 1 - Free body diagram (FBD) of a straight armslflexed hips press handstand at time ti.

328 PRASSAS
a free body diagram (FBD) of a gymnast executing a straight armslflexed hips press handstand, at time i. By equating the FBD of each of the model's links to its respective mass acceleration diagram, the muscular torques about the hip, shoul- der, and wrist joint can be calculated (Dillman, 1971; Miller & Nelson, 1973). Segmental mass as a percentage of total mass, position of each segment's CM, and segmental moment of inertia were calculated from Dempster's data (1955) as presented by Plangenhoef (1971). The lower extremities were assumed to be subjected to their weight acting at the segmental CM, a force exerted by the trunk at the proximal end, and a torque acting at the proximal (hip) joint. The trunk and upper extremities were assumed to be subjected to their own weight, plus forces and torques acting at both proximal and distal ends. The equations describing the gymnast's motion as it is depicted in Figure 1 were derived from Newtonian mechanics and are presented in the Appendix.
Center of Mass Motion
The position of the CM of the system in Figure 1 relative to the wrist joint is given by the equation,
'3
The X and Y components of rwcm are as follows:
The horizontal and vertical components of each segment's CM from the wrist joint in Equations 2 and 3 are functions of its angle from the right horizon- tal (&, d2, and O3 for Segments 1, 2, and 3, respectively), its mass ( q ) and its length (li). This indicates, then, that for an individual with certain anthropomet- ric parameters ( q and li), the position of his or her CM depends on the magni- tude of dl, 02, and 0,. The magnitude of 0,, however, is determined by 82 and 03; that is, for given O2 and B3 (from which shoulder and hip joint intersegmental angles can be determined, see Winter, 1979), a specific wrist joint angle (9,) must exist if the gymnast's CM is to remain above the center of the wrist joint. Conse- quently, for given hip and shoulder joint intersegmental angles, if the CM is to be maintained above the wrist joint, the gymnast must continuously adjust the wrist joint angle by exerting an appropriate torque throughout the movement.
Procedures
Experimental Methods
Five gymnasts of differing abilities served as subjects. Subject 1 had competed internationally, Subjects 2 and 4 had competed in college, Subject 3 was involved in acrobatics at the time of data collection, and Subject 5 was a relatively novice gymnast. A Photosonics 16mm-1PL camera set at 32 fps was utilized to record 10 straight armslflexed hips presses (two for each subject) on Kodak RAR 2498 Estar base black and white film. One press handstand for each gymnast was digi- tized. The wrist, shoulder, hip, and ankle joints' X and Y coordinates extracted

HANDSTAND IN GYMNASTICS 329
from the film were digitally filtered with a cutoff frequency of 2Hz before being submitted to further analysis. The experimental (i.e., derived from the film analy- sis) and simulated shoulder joint torques described below were normalized by expressing them as a percentage of the torque required to hold the planche posi- tion, that is, a skill in which the prone gymnast supports himself or herself over the hands with the body held parallel to the floor and elbow joints fully extended. The subjects' characteristics, and the cinematographic, torque normalization, and film analysis procedures utilized in this study are presented and described in de- tail elsewhere (Prassas et al., 1986).
Computer Simulation
An analysis program accepting as input body configuration (in this study, hip and shoulder joint intersegmental angles and wrist joint angle from the right horizontal), body segments' anthropometric parameters, and time between suc- cessive body configurations was utilized to predict the shoulder joint torque re- quired to reach each successive body configuration painis, 1974). By controlling the input body configurations and the elapsed time between them, the resultant segmental angular velocities were chosen and the required torques computed. A separate program solved Equation 2 for the dependent (wrist) joint angle neces- sary to maintain the gymnast's CM above the wrist joint center.
Results
Figure 2 depicts stick figure sequences of the five filmed performances. The body configurations for the simulated presses were similar to the experimental ones throughout the movement for all subjects except the fifth. The body configura- tion of the fifth simulated press was similar to the corresponding experimental one only up to the point of greatest hip joint flexion (GHJF). It deviated there- after to allow completion of the movement. However, since maintenance of fair- ly constant angular velocity was one of the constraints of the simulated presses, some minor discrepancies regarding the temporal relationship between hip and shoulder joint intersegmental angles occurred for all subjects.
Table 1 presents CM position and body configuration at the initial position UP), the position of GHJF, and the final position (FP) during both actual perfor- mance and simulated (in parentheses) conditions. Experimental and simulated (in parentheses) temporal results are shown in Table 2. In both cases, Subjects 1 through 4 needed roughly one third of their total time to complete the portion of the movement between IP and GHJF, with Subject 4 being at the low end of the scale. Of course, since the fifth subject did not complete the experimental press, no comparison of his temporal (experimental) data to that of the other sub- jects can be made-especially the percent of TT from GHJF to FP.
Graphical kinematic and kinetic data for three presses, selected by inde- pendent qualified observers as representing a range of performances (good, bet- ter, best; Subjects 4, 1, and 3, respectively) are presented in Figures 3 through 6. Angular velocities of the trunk and lower extremity segments, derived from film analysis and from simulation of the movement, are presented in Figure 3. A typical experimental trunk angular velocity increases progressively, reaches

PRASSAS
F'igure 2 - Stick-figure sequences for five straight armslflexed hips press handstands from the initial position (IP) to greatest hip joint flexion (GHJF) to final position (FP). The broken line for Subject 5 represents simulated body configuration.
IP GHJF
maximum value prior to GHJF, and decreases gradually thereafter. The cor- responding angular velocity of the lower extremities is fairly constant in the first part of the movement, peaks quickly into the last third or fourth part of the move- ment, and decreases to zero by the time the FP is reached. Angular velocity fluc- tuations within and between subjects reflect the degree of smoothness by which each press was executed. The simulated presses were smoother for all subjects; this smoothness is indicated by the respective simulated trunk and lower extremity velocity curves.
Figure 4 shows X and Y coordinates of each gymnast's total body CM mea- sured from the wrist joint and calculated from the film data. During performance, the CMs were continuously elevated from the beginning to the end of the move- ment and remained very close to a vertical line passing through the wrist joint (displacement of no more than f 5cm). The wrist joint angle required to main- tain the subjects' CMs above the center of the wrist joint is shown in Figure 5, suggesting that most of the gymnasts were slightly underbalanced (leaning back- ward) during the first part of the movement and slightly overbalanced (leaning forward) at the later phases.
FP
S1
S2

HANDSTAND IN GYMNASTICS
Table 1
Selected Parameters of the Straight ArmslFlexed Hip Press
Subjects 1 2 3 4 5
At IP Wrist JA Shoulder JA Hip JA CM position
At GHJF Wrist JA Shoulder JA Hip JA CM position
At FP Wrist JA Shoulder JA Hip JA CM position
Note. Joint angles (JA) in degrees. Center of mass (CM) position: degrees from right horizontal measured counterclockwise. IP = initial position; GHJF = greatest hip joint flexion; FP = final position.
Table 2
Temporal Results
Time (sec) Subjects
1 2 3 4 5
Tot. time (lT) 6 (5.9) 5.5 (5.6) 6 (5.9) 5.3 (5.4) 3.7 (5.4)
010 of TT from IP to GHJF 37 (37) 33 (34) 35 (37) 28 (33) 43 (35) 010 of TT from GHJF to FP 63 (63) 67 (66) 65 (63) 72 (67) 57 (65)
Experimental and simulated shoulder joint torques are presented in Figure 6. A typical experimental shoulder joint torque shows a rapid initial increase, peaks at some point prior to GHJF, and declines thereafter to approximately zero value at the FP. For more details regarding the experimental shoulder joint tor- ques, refer to Prassas et al. (1986). A typical simulated shoulder joint torque curve is similar to a typical experimental one. However, imposition of the con- straint of smoothness necessitates larger torques at certain portions of the move- ment, as Figure 6 indicates.

'(V Pw 'C 'TI slaf qns aaqq a03 ssaad aqljo (Inys) uo!leptqs 8upnp pw (qg) a~wmaopad pnpe Z~anp (~q) sa!lpaava aaMoI pw (MI) yunq am 30 Ll!qan mln8uv - c aan8!a
alfjuv w!or laplnoqs OOZ 091 OZL 0 8 0 P 0
OOZ
ooz
0
00 L-
OS-
0
0s
00 L
0s 1
OOZ
0
00 1-
OS-
0
0s
00 1
0s L
ooz

HANDSTAND IN GYMNASTICS
0 40 80 120 160 200
Shoulder Joint Angle
Figure 4 - X and Y coordinates of total body center of mass (CM) from the wrist joint calculated from film for three subjects.

a16uv w!or .J~PI~O~S OOZ 091 OZl 0 8 0 P 0
OOZ 091 OZL 0 8 0 P 0
08
L
Q z OOi 4
- a. OZL q V,
-
- a. OZL q V,
-


PRASSAS
0
0 4 0 8 0 120 160 200
Shoulder Joint Angle
Figure 7 - Shoulder joint torques during actual performance (film), during simu- lation with similar body configuration (simul), and when the minimum hip joint an- gle was reduced by 5" (simul 5) and 10" (simul 10) for two subjects.
The effect of greater hip joint flexion on the shoulder joint torque is shown in Figure 7. Reduction of the hip joint angle by 5 or 10" for the two subjects who completed the press with the smallest decrease in hip joint angle (Table 1) did not result in any substantial change in the corresponding shoulder joint torque and is well within experimental error.
Figure 8 presents experimental and simulated shoulder joint torques and trunk and lower extremities angular velocities for the fifth gymnast. It is shown that if the rate of the gymnast's hip joint extension in relation to the simultaneously occurring shoulder joint flexion after the point of GHJF was less than the ob-

HANDSTAND IN GYMNASTICS
0 4 0 8 0 120 160 200
Shoulder Joint Angle
Figure 8 - Shoulder joint torques (sjt) and angular velocity of the trunk (tav) and lower extremities (leav) during actual performance (film) and during simulation (simul) of the press for Subject 5.
served, then the gymnast might have been able to complete the skill without ad- ditional shoulder joint muscular forces. However, the rapid and not properly timed hip joint extension (Figure 2) greatly increased the moment of the gymnast's trunkllower extremities weight about the shoulder joint, thus increasing the de- mands made upon the joint's musculature (Prassas et al., 1986). It should be point- ed out, however, that in the sport of gymnastics mere completion of a skill is not the gymnast's only objective. In a competitive situation, even if the fifth sub- ject had the strength to complete the press in the observed semistraight body con- figuration, he would have been penalized by the judges for improper execution.

338 PRASSAS
Discussion
The purpose of this study was to develop a biomechanical model of the press handstand that could evaluate and predict shoulder joint torque requirements and motion of a gymnast's CM from the beginning to the end of the movement. The shoulder joint torque data (Figures 6, 7, and 8) revealed that the basic shape of a respective torque curve is parabolic in nature for the performance of this skill. Its magnitude rises rapidly initially, peaks at some point prior to the GHJF (when a straight armslflexed hips press is considered), and gradually declines there- after to a zero at the final handstand position. It has been pointed out that the initial rapid increase is warranted in light of the progressively larger inertial forces that the shoulder joint musculature must overcome as the shoulder joint flexion increases the moment of the combined trunkllower extremity segment (Prassas, 1985; Prassas et al., 1986). Fluctuations from this pattern can be attributed as necessary to control angular velocity and to stabilize the shoulder joint (in accor- dance with Newton's action-reaction law) whenever hip joint movement exists. The larger and more abrupt the differences in angular velocity, andlor the more rapid the hip joint motion (providing of course that hip joint motion exists or is permitted), the more pronounced the fluctuations become. This becomes ap- parent by comparing the kinematic and kinetic data in Figures 3 and 6, for each subject and between all subjects.
Caution should be exercised when comparing the experimental and simu- lated shoulder joint torque curves of each subject independently and in conjunc- tion with each other. For example, it would be incorrect by just looking at Figure 6 to conclude that the first portion of the performance of Subject 4 was necessari- ly better than the respective portion of Subject 1. Although a subject's experi- mental shoulder joint curve can nearly coincide to an "optimum" simulated curve (as the first portion of the respective torque curve of Subject 4), this should not necessarily be perceived as an indication of superior performance. This close- ness could be achieved by making undesirable modifications in body configura- tion or speed of the movement. It is impossible to recognize/reproduce/visualize the motion of a multilinked system by examining the kinetics of one link. Even the knowledge of the kinetics of the complete system is not sufficient to explain its motion without insight into the particular movement and without knowing the initial configuration of the system. Comparison of the experimental and simulat- ed shoulder joint torques in the present study thus becomes valuable only with complete insight into the particular presses. That is, Figure 6 becomes meaning- ful in conjunction with Figure 3 and the knowledge that the body configuration of the particular experimentallsimulated presses were similar. If we accept the analyzed performances as being typical of competitive presses, however, then we can conclude that, in general, smoother and at times larger shoulder joint tor- ques are required in order to execute the movement more skillfully. With regard to the fifth (unsuccessful) press, the data presented in Figure 8 tend to support the statement of Prassas et al. (1986) that, at times, the limiting factor for the successful performance of the straight armslflexed hips press might be related more to (poor) motor coordination than to (lack of) shoulder joint strength.
The data in Figure 7 relating the changes in hip angle by 5 and 10" to the shoulder joint torque are not conclusive. It is apparent that such small reductions in the first variable did not substantially reduce the moment of the weight of the

HANDSTAND IN GYMNASTICS 339
combined trunk/lower extremity segment, which in turn should reduce substan- tially the shoulder joint torque (providing of course that the speed of the move- ment remained the same). However, before suggesting that gymnasts should substantially reduce the hip joint angle at a particular phase of the skill, so that substantial reductions in shoulder joint torques may be achieved, one should exa- mine whether such reductions are physically possible and realistically achieva- ble. Previous data have shown that gymnasts in general during the performance of the straight armstflexed hip press do not reach the minimum hip joint angle that can be obtained during a passive flexibility test (Prassas et al., 1986).
Most gymnasts were able to maintain their CM very close to a vertical line passing through the center of the wrist joint throughout the movement (Figure 4). Since the gymnast's grip on the parallel bars is such as to orient his hands in the sagittal plane, the gymnast must facilitate the muscles producing radial devi- ation when the CM lags behind the wrist joint, and the muscles producing ulnar deviation when the CM is in the front of the joint. In this study, torques of this nature maintained dynamic equilibrium of a slightly underbalanced (from IP to GHJF) or overbalanced (from GHJF to FP) gymnast (Figures 4 and 5).
Although the model was applied to the straight arms/flexed hip press per; formed on the parallel bars, it can be modified to cover other variations of the skill performed on other apparatus. It should be pointed out that a press hand- stand on the still rings would require, in addition to flexor shoulder joint torques, torques in the frontal plane, that is, adductor torques for stabilization purposes. However, this modification would be inherently more complicated, requiring three- dimensional analysis.
Conclusion
The findings of the present study indicate that for similar body configurations, execution of the press handstand with fewer fluctuations in body segments angu- lar velocity require smoother and at times larger shoulder joint torques. Caution should be exercised when attempting to classify a given press as skillful based on only comparative kinetic information. Reductions of hip joint intersegmental angle by 5 or 10" do not substantially reduce the shoulder joint torque require- ments. Small modifications in wrist joint angle are necessary to maintain the gym- nast's CM above the center of the wrist joint, which lags slightly behind the joint during the early phases of a press and moves slightly in front of the joint at the late stages. Investigation of one unsuccessful press suggests that the limiting fac- tor for completion of the skill may not be lack of muscular strength but possibly poor motor coordination.
I
References
Brown, J.R. (1980). Teaching and coaching gymnastics for men and women. New York: Wiley .
Dainis, A. (1974). Analysis and synthesis of body movements utilizing the simple n-link system. In R.C. Nelson & C.A. Morehouse (Eds.), Biomechanics N(pp. 5 13-5 18). Baltimore: University Park Press.
Dempster, W.T. (1955). Space requirements of the seated operator (WADC Technical Report 55-159). Dayton, OH: Wright-Patterson Air Force Base.

340 PRASSAS
Dillman, C.J. (1971). A kinetic analysis of the recovely leg during sprint running. In J. Cooper (Ed.), Selected topics in biomechanics (pp. 137-165). Chicago: Athletic Institute.
Faria, I. (1972). Men S gymnastics: Parallel bars. Chicago: Athletic Institute. Fukushima, S., & Russel, W. (1980). Men's gymnastics. London: Faber & Faber. International Gymnastics Federation (FIG). (1985). Men's technical committee. Code of
Points, Switzerland: Author. Miller, D., & Nelson, R. (1973). Biomechanics of sport. Philadelphia: Lea & Febiger. Plagenhoef, S. (1971). Patterns of human motion: A cinematographic analysis. Englewood
Cliffs, NJ: Prentice-Hall. Prassas, S.G. (1985). A biomechanical analysis of the press handstand on the parallel bars
utilizing inverse dynamics techniques. Doctoral dissertation, University of Maryland. Prassas, S.G., Kelley, D.L., & Pike, N.L. (1986). Shoulder joint torques and the straight
armlflexed hips press handstand on the parallel bars. In J. Terauds, B. Gowitzke, & L. Holt (Eds.), Biomechanics in sports III and ZV (pp. 83-95). Del Mar, CA: Academic.
Puchet , J. (1979). Complete gymnastics handbook. New York: Parker. Winter, D.A. (1979). Biomechanics of human movement. New York: Wiley.

HANDSTAND IN GYMNASTICS 34 1
Appendix
Notation
Ti = muscular torque about the joint. Fxi, Fy, = horizontal and vertical components of the resultant force at the joint. Wi = weight of , segment. I,= moment of inertia of the i segment about its CM. Xh,,,,crni Yh,s,wcmi= horizontal and vertical coordinates of the CM of the , segment from
the hip (h), shoulder (s), or wrist (w) joint. M =total mass. mi = mass of the segment. xi, yi= horizontal and vertical components of the linear acceleration of the CM of the ,
segment. ei =angular acceleration of , segment. rwcm = position vector of system's CM from origin (wrist joint). ri= position vector of the CM of the , segment from origin (wrist joint). xiw, y,=x and y components of ri. 8, =angle of the , segment from the right horizontal, measured counterclockwise. 1,2,3 = segment number (upper extremities, trunk, and lower extremities, respectively). h,s,w= hip, shoulder, or wrist joint.
Equations of motion
Segment 3 (lower extremities) Resultant hip joint forces:
Fx, = m3x3 Fyh = m3ji3 + W,
Resultant hip joint torque: T, = I,& - Fxh(Yhcm) + Fy,(X,cm)
Segment 2 (trunk): Resultant shoulder joint forces:
Fx, = m2x2 + Fxh Fy, = m2y, + Fx, + W,
Resultant shoulder joint torque: T, = 12& + T, - Fx,(Y,cm) + Fyh(Xhcm) - Fxh(Y,cm) + Fy,(X,cm)
Segment 1 (upper extremities): Resultant wrist joint forces:
Fxw= mlxl + Fx, Fyw= m,y, + Fy,+ W,
Resultant wrist joint torque: Tw = I,& + T, - Fx,(Y,cm) + Fy,(X,cm) - Fxw(Ywcm) + Fyw(Xwcm)