Embed Size (px)
Citation preview
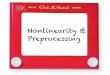
Pergamon Computers Elect. Engng Vol. 23, No. 5, pp. 283-299, 1991
0 1998 Elsevier Science Ltd. All rights reserved Printed in Great Britain
PII: SOO45-7!Xl6(97)00020-7 0045-7906/97 $17.00 + 0.00
BINARIZED COMPOSITE FILTER DESIGN USING MAJORITY-GRANTED NONLINEARITY
FARID AHMED’ and MOHAMMAD A. KARIM* ‘Electrical Engineering, School of Engineering & Engineering Technology, Pennsylvania State
University, The Behrend College, Erie, PA, 16563-1701, USA and Wniversity of Dayton, Center for Electra-Optics, 300 College Park Avenue, Dayton, OH, 45469-0245, USA
Abstract-A voting scheme for the construction of composite filter for distortion-invariant optical pattern recognition is addressed. The motivation is the limited modulation capability of the spatial light modulator (SLM) which is incorporated as a design constraint in the form of majority-granted nonlinearity. The technique is simple, and less computationally extensive nevertheless resulting in a robust enough SLM-realizable distortion-invariant correlator. Simulation results are presented for rotation invariant character recognition, which shows better correlation discrimination and robust recognition for threshold detectors. 0 1997 Elsevier Science Ltd.
Key words: Distortion-invariance, composite filter, pattern recognition, majority-granted nonlinearity, spatial light modulator, binary filter.
1. INTRODUCTION
Correlation-based optical pattern recognition is performed using two different techniques: classical matched correlation [l], and joint Fourier transform (JFT) correlation [2]. Phase-only filter (POF) [3], a special case of classical matched filter, and its variants were developed simply to improve the correlation performance, however, none of these filters is inherently distortion-tolerant. Distortion invariance in the literature is addressed in two different ways. In the synthetic discriminant function (SDF) filter approach [4,5], a number of distorted images are trained to design a filter, which is expected to respond favorably to all other distorted images. Minimum variance synthetic discriminant filter (MVSDF) [6], minimum average correlation energy (MACE) filter [7] and optimum trade-off SDF (OTSDF) [8] are examples of such composite filter formulations. In the second approach, geometric invariance properties are used in the filter formulation [9-121. For example, circular harmonic filter expansion for rotation invariance has been proposed. Here, the images distorted by rotation are represented in polar coordinates using circular harmonic components. Use of filter modulation in SDF construction has also been proposed [13-161 to improve the invariance performance.
All the afore-mentioned filters necessitate a recording device that can effectuate fully complex modulation of arbitrary continuous amplitude. However, in reality, such continuous-valued spatial light modulators (SLM) are not available. This scenario further aggravates the composite filter construction,‘where the dynamic range of the desired filter might be larger than that of the SLM, thus resulting in saturation. Quantization of the filter [17-191 along with different discretization techniques, such as mentioned in Refs [20-221, is therefore employed to tailor it to the limited modulation capability of the available SLM. Horner and Gianino first proposed the phase-only composite filter [23], using only the phase information of the standard SDF. Kallman’s recipe for binary phase-only (BPO) SDF results in optimal low-noise detection. There have been other significant works [13,24] for the efficient construction of realizable filters. Optimization of a wide variety of correlation metrics for an arbitrary SLM was also addressed recently [25-271 for optimally realizable filters. With considerable success in their respective perspectives, all these methods are characterized by computational expense accruing from their inherent iterative nature. In this work, we particularly emphasize our focus on this problem. The proposed filter synthesis is very simple but robust. Our design starts with a binary
283
284 F. Ahmed and M. A. Karim
7-
Correlation
peak 6-
---- 5-
Rotation angle
Fig. I. Typical BPOF performance with respect to in-plane rotation.
SLM. This modulation limitation is used as a constraint in the very formulation of the filter, thus leading to a readily-realizable composite filter in a binary SLM. The technique is validated through a simulation for rotation-invariant character recognition.
2. VOTING SCHEME BASED COMPOSITE FILTER
The motivation behind the composite filter design is the attainment of invariant filter performance over a predicted distortion range of the input scenario. A filter constructed from a single snapshot of an object cannot achieve this invariance. Figure 1 shows the typical characteristics of three BPOFs constructed from a O”, IO”, and 20” in-plane rotated version of the character “F”. The filter fabricated from an unrotated character performs well for input characters near 0” rotation. Similarly, a filter constructed from a 10” rotated object shows better performance for the images rotated in the vicinity of 10”. It is expected, therefore, that a linear combination of these filters will be able to perform well over the possible distortion range.
We propose to use a voting technique for this linear combination. In addition, the votes could be either yes ( + 1) or no ( - l), which is motivated by the fact that we are considering a binary SLM in the present case. The scheme is furnished below. A number of representative distorted images are first selected. M filter features F,,F,,.. .,F k,.. .,FM of these images are then determined. Here, we use the BPOF feature. In general, one could have started with any desirable filter modulation to come up with the training set of single-image filters [13, 161. A voting scheme using
Table I. Majority-granted nonlinearity
4 4 Fi H
-1 -1 +I -1 -I $_I -1 -1 -I +I +1 +I
Binarized composite filter design 285
Fig. 2. Voting scheme shown with the use of a hypexcube.
these features is then employed in the design of the desired composite filter, H. Each pixel of a training feature, F,(Q), is assigned a vote for the corresponding pixel, H(Q), of the desired composite filter. The cast vote is a yes ( + 1) if the pixel value is greater than a threshold value, else it is a no ( - 1). The threshold used here is obtained using the threshold line angle (TLA) of 45” [22]. Algorithmically
H(U) = H&j) + 1,
if R[Fr(ij) exp(j$)] > 0
H(ij) _ 1, otherwise. (1)
Votes from each of the training features are thus collected. The final filter is determined by counting the votes obtained for each pixel. If the majority of the training features say yes ( + 1) to a filter element, then that element is set to + 1. Otherwise, it is set to - 1. Because of the fact that the votes could be either + 1 or - 1, for the reason mentioned earlier, this majority-granted scheme can be formulated in the following way:
+ 1, if H(ij) > = 0 otherwise. (2)
An interesting outcome of this scheme is that it has the minimal average Euclidean distance from the filter features of the training set, which is shown below. The distance is given by
= ~k$,lIY(ij) - Fk(iA12.
(3)
Now, since H(ij) corresponds to the majority of Fk(ij), therefore the term H(ij) - Fk(ij) is zero
286 F. Ahmed and M. A. Karim
3. Test images: E. F. an d P.
for the majority of the training filters, thus yielding a minimal Euclidean distance. Note that this distance is different from Juday’s Euclidean distance [25]. While Juday’s approach gives a general formulation of minimizing the distance between the unconstrained and the device constrained filter, our approach attempts to minimize a metric which is the distance of the desired filter from the set of training filters. This minimum distance phenomenon can be explained with a hypercube. For
(a) ON
Fig. 4. Rotated versions of the character F: (a) 0 rotated; (b) 90’;; (c) 180”:; and (d) 270”.
Binarized composite filter design 287
Fig. 5. Binary composite filter for the test character F constructed for a distortion range of O”-30”.
a filter size of N x N, theoretically, there is a total of 2N’ different BPOF combinations. Now, each constituent training filter of the composite filter is a vertex of the N*-dimensional hypercube. The selection of training images is motivated by the fact that the corresponding filter features constitute a cluster of vertices in the hypercube. The desired filter, H, is also represented by a vertex, which is obtained in such a way that the sum of the Euclidean distances from all the vertices (corresponding to training filters) is minimum.
To show that the majority-granted nonlinearity results in an optimal filter, let us assume BPOF features for the training images, i.e. IF,(ij)( = 1. equation (3) can than be written as
E(H) = c 5 IH(i + IF,(ij)l’ - 2H(ij)F,(ij) iJk=l >
= 21%f - 2H(ij) t Fk(ij) .
k=l >
Defining the average over the training set as
we get
E(H) = 2M N* - cH(ij)X(ij)
Now the term &H(ij)X(ij) represents the peak value of the correlation of the desired filter with the average of the training set. A minimal average Euclidean distance E(H), therefore, ensures
288 F. Ahmed and M. A. Karim
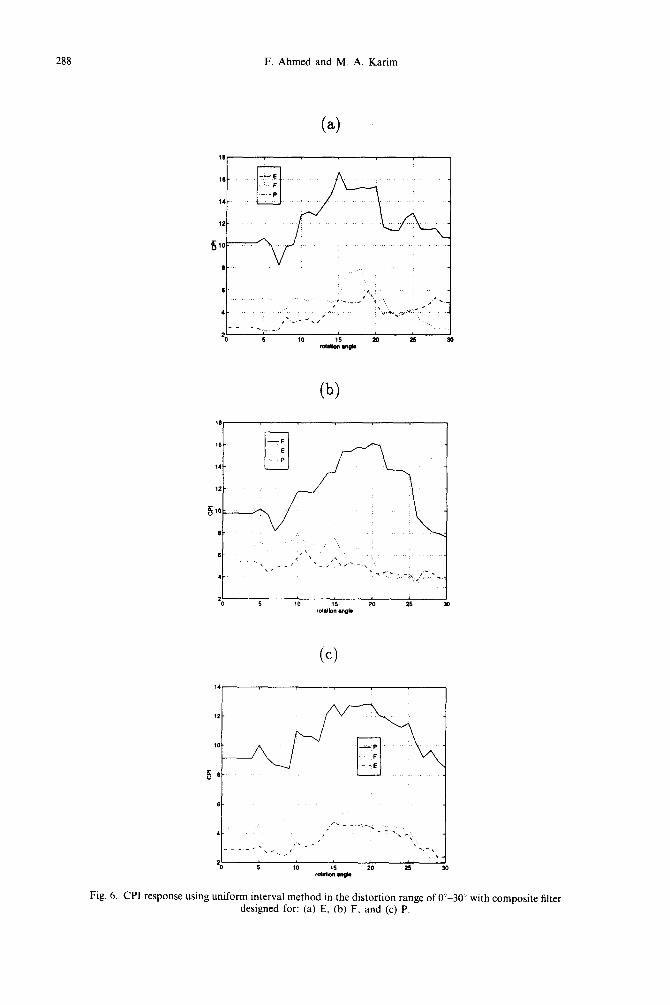
Fig. 6. CPI response using uniform interval method in the distortion range of O”-30” with composite filter designed for: (a) E, (b) F. and (c) P.
Binarized composite filter design
Table 2. Discrimination Derformance of the scheme with uniform interval trainine set selection method
289
Target filter ADR DR O”-30’ o--60‘ O’-90 O=-30 OO-60” O’-90”
E 2.8 3.13 2.24 I.04 I.01 0.69 F 2.2 I.91 I .67 0.98 0.59 0.49 P 2.7 2.41 I .89 1.52 0.49 0.32
maximal correlation peak in this case. On the other hand, majority-granted nonlinearity ensures the following:
if X(ij) > = 0 otherwise.
The above equation, therefore, results in a maximum possible &H(ij)X(ij) (within the training set, of course).
The above-described majority-granted scheme can be clarified
(6)
value for the correlation peak
further with a simple example. Suppose we want to design a three-element filter, H, from three training filter features F,, F2, and F,. The first three columns of Table 1 represent the votes cast by the three features. Using majority-granted technique, His obtained as shown in column 4. Figure 2 shows this in a hypercube representation.
As is evident from the previous description, the success of this method depends heavily on the choice of the training set of filter features. We discuss the effect of three different types of training set selection techniques. These are necessary to overcome the absence of Lagrange multiplier optimization used in other works [25-271.
1. Uniform distribution. The training features are taken uniformly with an interval d from the whole distortion range. In typical SDF approaches, the choice of d is usually very crucial which is found to be less critical in the present technique.
2. Weighted vote. Here, the selected features do not have equal voting power. The voting weights are determined from the correlation coefficients of the training filters, with respect to a reference filter. This reference filter (FJ is taken to be the filter corresponding to the distorted image having a distortion which lies in the middle of the possible distortion range. This is motivated by the fact that the voting scheme is biased to the mid-range distortion values, which will be further explained in the following section. The voting weight wk of the training filter Fk is, therefore,
(7)
The above formulation ensures that the reference filter has a voting weight of 1. Some hard threshold might actually be necessary to limit the weights obtained with the above formulae, to some desired range.
3. Extrapolation. Consider designing a filter to have invariant performance in the distortion range defined by [Di,DJ. The training images will then be taken uniformly from an extended range defined by [D, - A,,DI + A,].
3. SIMULATION RESULTS
The performance of the proposed method is verified for the rotation-invariant character recognition. Three binary characters, E, F, and P, as shown in Fig. 3, are considered. These characters are chosen, because of their similar enough shape characteristics. In the simulation, each of the characters is treated as a target, while the other two are considered as non-target. For example, when the composite filter is constructed for the target character E, then the other two test characters F and P are taken as non-targets. The individual characters are 12 x 9.
290 F. Ahmed and M. A. Karim
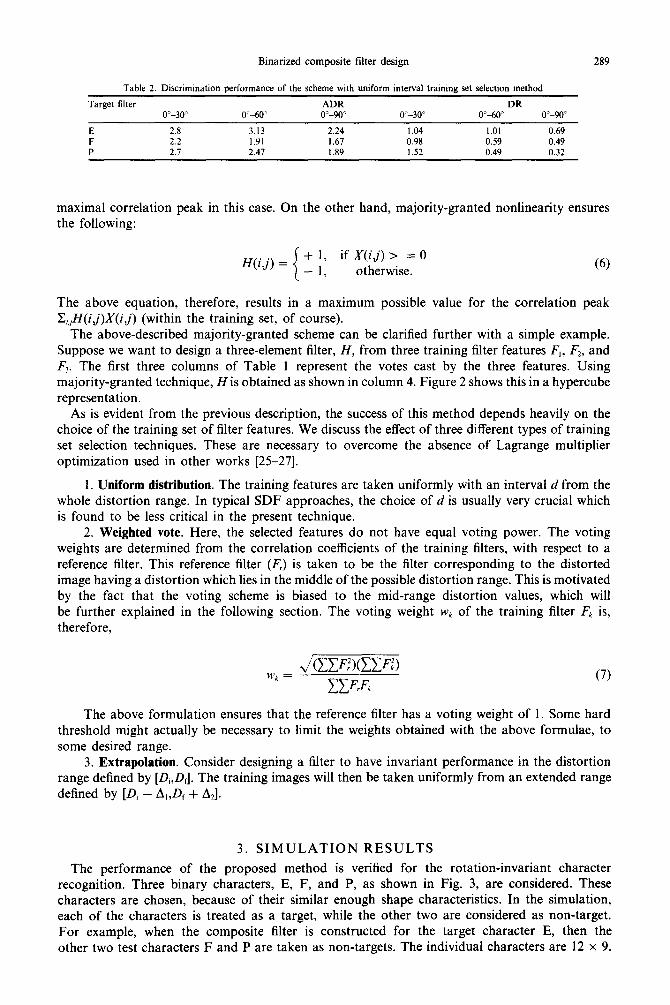
Fig. 7. CPI response using uniform interval method in the distortion range of O”-60” with composite filter designed for: (a) E, (b) F, and (c) P.
Binarized composite filter design 291
04
20 30 40 50 M 70 RI ml* mql.
(4
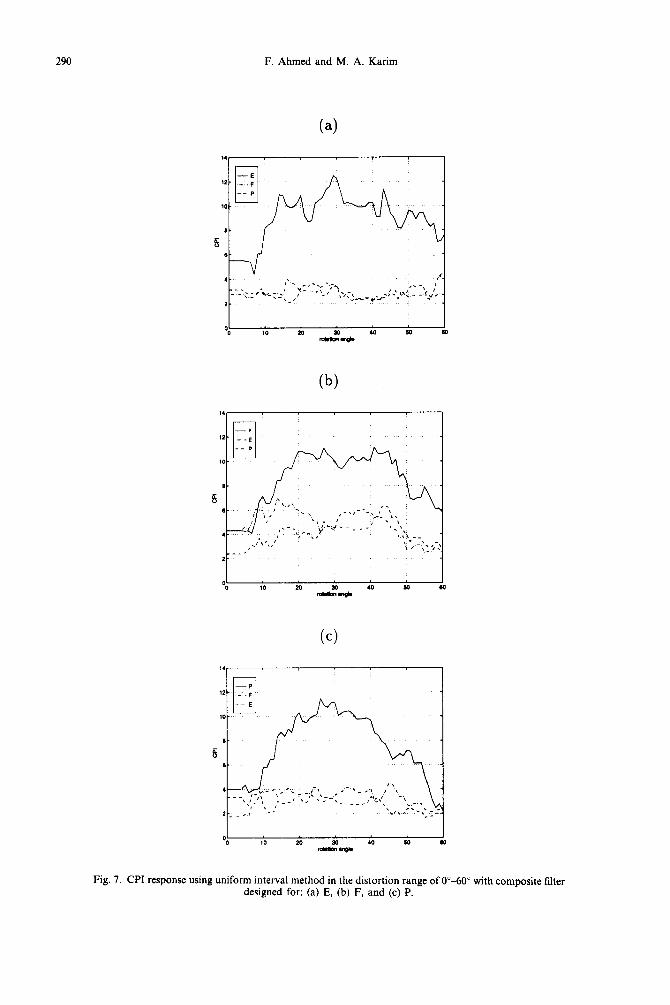
Fig. 8. CPI response using uniform interval method in the distortion range of O”-90” with composite filter designed for: (a) E, (b) F, and (c) P.
292 F. Ahmed and M. A. Karim
(4
a- _ .‘, I \
w
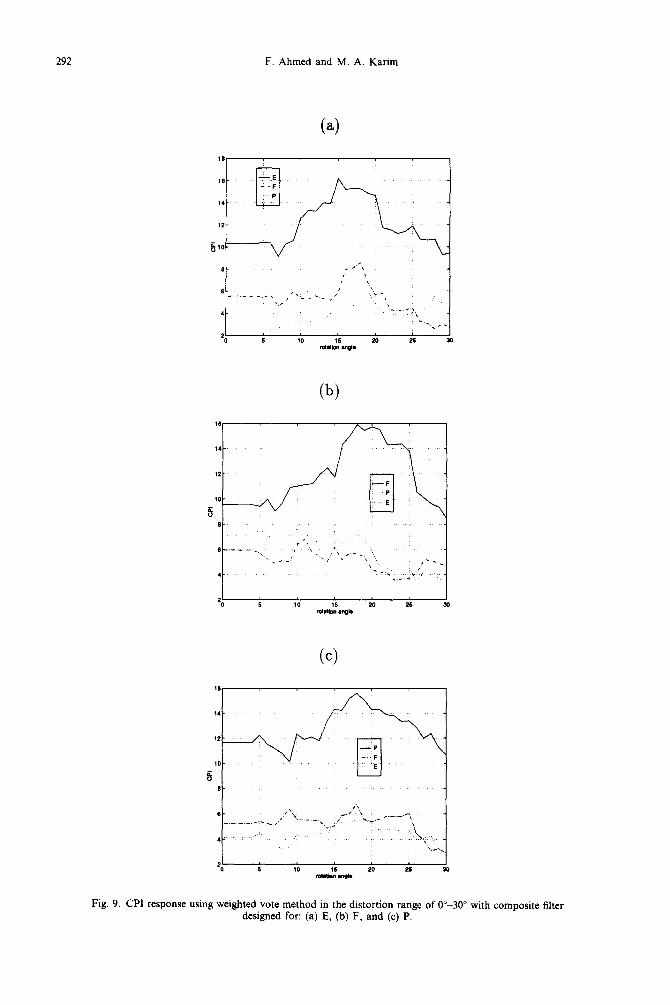
Fig. 9. CPI response using weighted vote method in the distortion range of O”-30” with composite filter designed for: (a) E, (b) F, and (c) P.
Binarized composite filter design 293
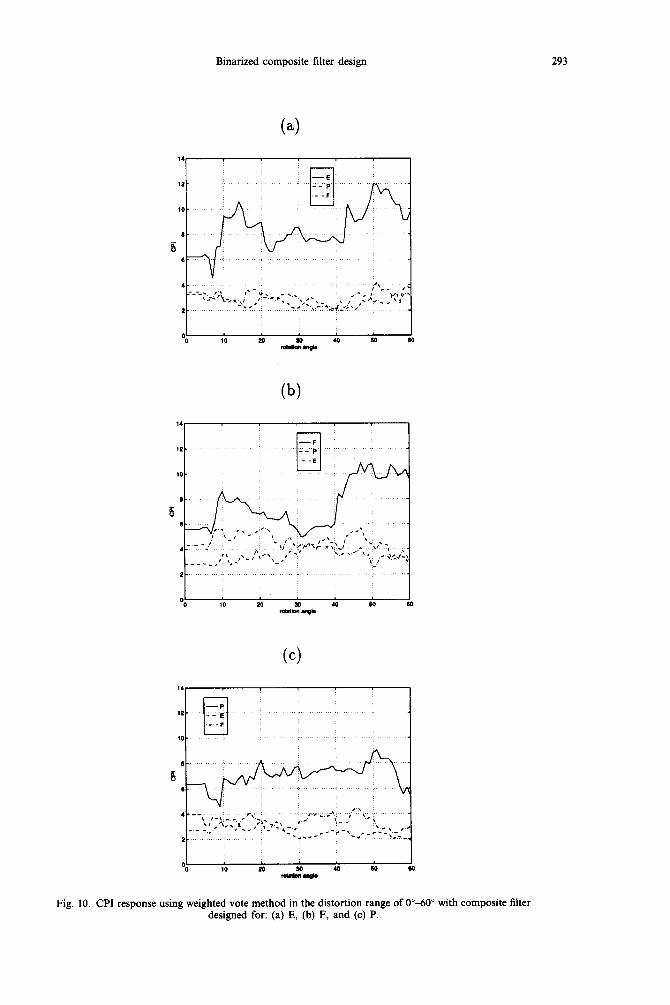
Fig. 10. CPI response using weighted vote method in the distortion range of 0”-60” with composite filter designed for: (a) E, (b) F, and (c) P.
294 F. Ahmed and M. A. Karim
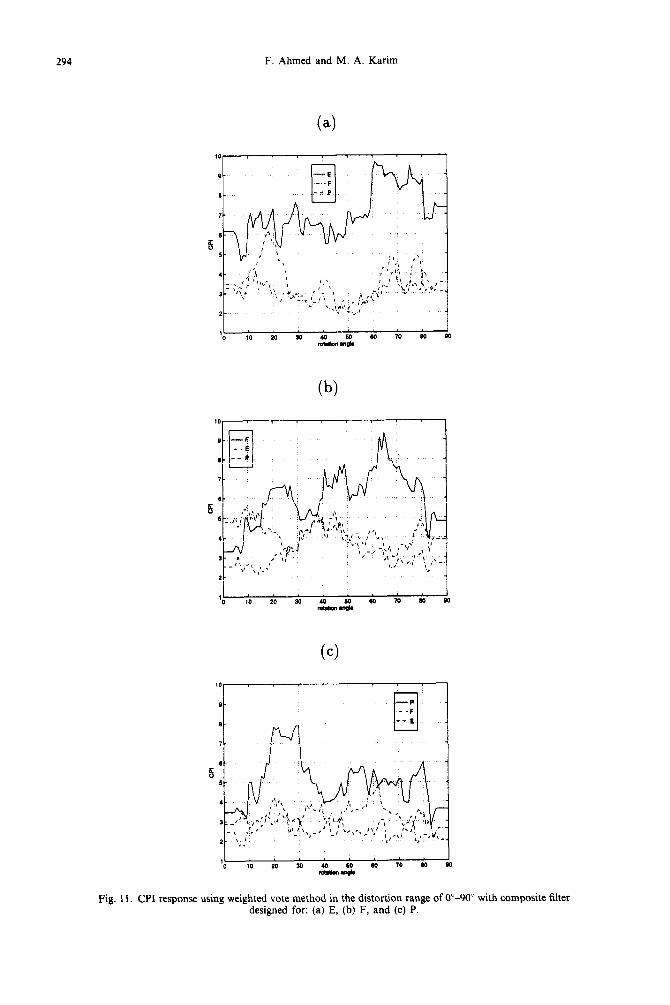
Fig. 11. CPI response using weighted vote method in the distortion range of W-90” with composite filter designed for: (a) E, (b) F, and (c) P.
Binarized composite filter design 295
Table 3. Discrimination performance of the scheme with weighted vote training set selection method
Tarnet filter DR
0 -30 0 -60 o=-90”
E I .07 1.21 0.76 F 1.11 0.78 0.57 P 1.49 0.86 0.57
In the correlation, these are zero padded to 32 x 32. The training images with different in-plane rotations are first selected. Four rotated images of the character “F”, for example, are shown in Fig. 4.
To quantify the simulation results, we consider two performance metrics. The first one is the average discrimination ratio (ADR) which is defined as the ratio of the average peak value of the autocorrelation intensity to the average peak value of the cross-correlation intensity. This gives an overall performance measure of the SDF filters, although it is not necessarily a good metric for recognition applications. Autocorrelation here is the correlation of a distorted version of a target character with the target filter. Cross-correlation, on the other hand, is the correlation of any non-target with the target filter. The other metric, which is more important, is a discrimination ratio (DR) defined in equation (5). Let (H,F,) denote the correlation plane of the filter H with the input image F,. Then
DR = min [mm [(H,fi)II max [max [(HJ,)lI (8)
where F, represents any distorted target, i.e. F,Etarget class, and F,,Enon-target class. This metric is therefore the ratio of the minimum autocorrelation peak intensity to the maximum cross-correlation peak intensity. DR must be greater than 1 for the detection of all possible distorted target inputs. When it is less than 1, then it is decided that the constructed filter H cannot discriminate well between target and non-target. With all the training set selection methods, we consider an interval of 5’ in the desired distortion range of O”-30”, O”-60”, and O”-90”. Figure 5 shows the binary-valued filter for the character “F” designed for a distortion range of O”-30”. Figure 6(a) shows the variation of correlation peak intensity (CPI) with respect to the rotation angle. Here, the composite filter is constructed for the character E and the correlation result is obtained for all three characters. As seen from Table 2, the DR values are greater than 1 for filter E and P, but less than 1 for the filter of character F. Figure 7 displays the correlation performance for a distortion range of O”-60”. Similarly, distortion performance in the range of O”-90” is obtained as shown in Fig. 8. The correlation performance degrades with increasing distortion range, as is summarized in Table 2.
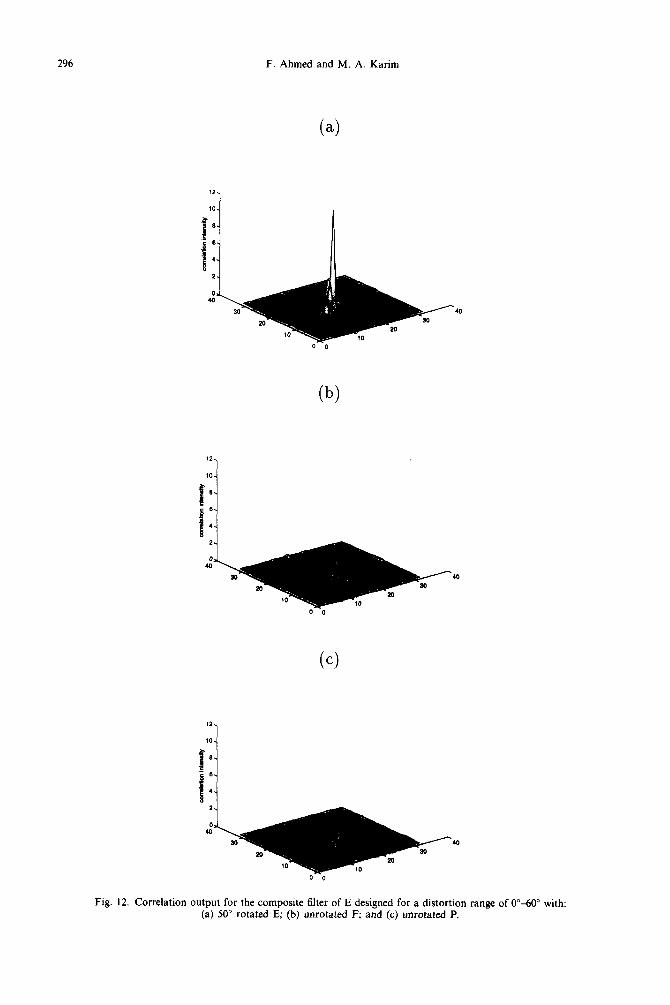
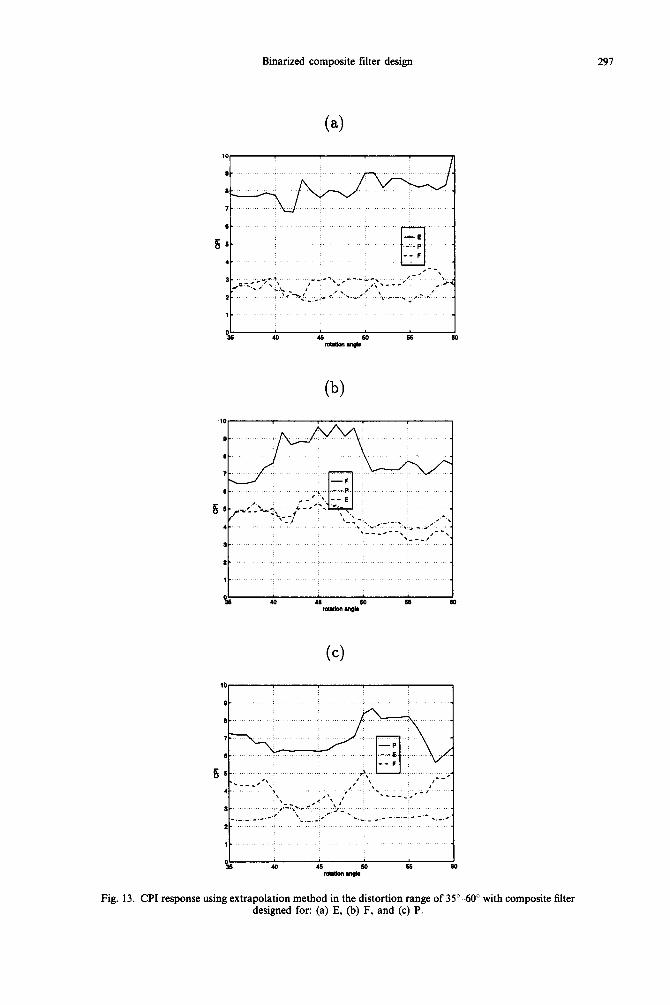
Next, we use the training set selection method 2, which employs the weighted vote technique. We limit the weight values to fall in the range of 1 I wk I 2. The resulting correlation performances are shown in Figs 9 - 11 for the three distortion ranges. Note carefully that the overall discrimination performance is better in this case, as enumerated in Table 3. In particular, the filter for target F now has a DR value of 1.11 against the non-targets F and P, while it had a DR value of 0.98 in the previous case. A typical output correlation plane is shown in Fig. 12 for the filter constructed for “E” in the distortion range of O”-60”. In the previous two cases, one important observation is that discrimination is better in the mid-range of distortion than that at the two ends. This is a sufficient motivation to use the extrapolation method. The desired distortion range is 35”-60”, while with a choice of A, = A, = 35”, training was performed in the distortion range of O”-95” with an interval of 5”. The resulting better performance is illustrated in Fig. 13. Note that the DR values are now greater than 1 for all the filters (1.86 for “E”, 1.09 for “E”, and 1.09 for “P”). This ensures invariant detection of the characters in the distortion range of 30”-60”. Note that in the cases where DR > 1, we can set a threshold value for the correlation peak, above which the input can be treated as a target and below which it is a non-target. The exact simulation results furnished above are image-specific. However, the general trend of correlation discrimination for
296 F. Ahmed and M. A. Karim
12
10 1 I
(b)
Fig. 12. Correlation output for the composite filter of E designed for a distortion range of 0”-60” with: (a) 50’ rotated E; (b) unrotated F; and (c) unrotated P.
Binarized composite filter design 297
(b)
(4
Fig. 13. CPI response using extrapolation method in the distortion range of 3Y-60” with composite filter designed for: (a) E, (b) F, and (c) P.
298 F. Ahmed and M. A. Karim
distortion-invariance has been found to be similar for a wide variety of images we have experimented with, which is also validated by the intuitive reasoning described in the discussion of results.
4. CONCLUSION
A rotation-invariant filter based on filter features of the training images, which is readily realizable in a binary SLM, has been presented. The important result here is the composite filter construction which uses a simple voting technique. Although this scheme does not ensure orthogonalization of the individual training filters, however, this problem is mitigated by the training set selection procedure. Also, the number of training filters required herein does not have any adverse effect on performance, because of the use of a majority-granted algorithm. With the use of weighted vote and extrapolation, a constant threshold value for the correlation peak response can be obtained for this scheme, which effectively converts the system to an effective recognition system.
I. 7
i :
4.
5. 6. 7.
8.
9. 10.
II.
I?. 13.
14.
15.
16.
17. 18. 19. 20.
21. 22.
23.
REFERENCES
VanderLugt, A.. Signal detection by complex spattal tiltermg. IEEE Trms. Infornu~ron Theory. 1964, IT-IO, 1399145. Weaver. C. S. and Goodman. J. W.. A technique for optically convolving two functions. Appl. Opt, 1966,5, 1248-1249. Gianino. P. D. and Horner. J. L.. Phase-only matched filtering. Appl. Opr.. 1984, 23, 812X316. Hester. C. F. and Casasent. D.. Multivariant technique for multiclass pattern recognition. Appl. Opt., 1980, 19, 1758%1761. Casasent. D. P.. Unified synthetic discrtmrnant function computational formulation. Appl. Opt., 1984, 23, 1620P1627. Kumar, B. V. K. V.. Minimum variance synthetic discriminant functions. J. Opt. Sot. Am. A, 1986, 3, 157991584. Mahalanobis. A.. Kumar. B. V. K. V. and Cassasent. D.. Minimum average correlation energy filters. Appl. Opr.. 1987. 26, 3633-3640. Refregier, P.. Optimal trade-off filters for noise robustness. sharpness of the correlation peak and Horner efficiency. Opt. Lrtt.. 1991. 16, 829-831. Casasent. D. and Psaltis. D., Position, rotation, and scale invariant optical correlation. Appl. Op/.. 1976. 15, 179S1799. Hsu, Y. N. and Arsenault. H. H., Optical pattern recognition using circular harmonic expansion. Appl. Opl.. 19$X 21, 40164019. Yu, F. T. S., Li. X. Y.. Jutamalia. S. and Gregory. D. A.. Rotation invariant pattern recognition with a programmable joint transform correlator. Appt. Opr.. 1989. 28, 47254727. Elizur. E. and Friesem, A. A.. Rotation-invariant correlation with incoherent light. Appl. Opt., 1991. 30, 41754178. Jared, D. and Ennis. D., Inclusion of filter modulation in the synthetic discriminant function construction. Appl. Opr.. 1989. 28, 232-239. Reid, M. B.. Ma, P. W.. Downie, J. D. and Choa. E. 0.. Experimental verification of modified synthetic discriminant function filters for rotation invariance. Appl. Opr.. 1990, 29, 1209-1214. Wang. R. K., Chatwin, C. R. and Huang, M. Y.. Modified filter synthetic discriminant functions for improved optical correlator performance. Appl. Opr.. 1994. 33, 7646-7654. Ahmed, F. and Karim. M. A., A filter-feature based rotation-invariant joint Fourier transform correlator. Appl. Opt.. 1995. 34, 755&7560. Horner. J. L. and Leger. J. R.. Pattern recognitton with binary phase-only filters. Appl. Opt.. 1985. 24, 609-61 I. Horner. J. L. and Bartlet. H. 0.. Two-bit correlation. Appl. Opt., 1985. 24, 2889-2893. Farn. M. W. and Goodman. J. W.. Optimal binary phase-only matched filters. Appl. Opr.. 1988, 27, 4431-4437. Bartlet. H. and Horner. J., Improving binary phase correlation filters using iterative techniques. Appl. Opt., 1985, 24, 28942897. Dickey. F. M. and Hansche, B. D.. Quad phase-only tilters for pattern recognition. Appl. Opt., 1989, 28, I61 l&1613. Flannery, D. L.. Loomis. J. and Milkovich. M.. Design elements of binary-phase-only correlation filters, Appl. Opr., 1988, 27, 423 I. Horner. J. L. and Gianino. P. D.. .4pplying the phase-only filter concept to the synthetic discriminant function correlation filter. Appl. Opr., 1985, 24, 851-855.
24. Mahlab, U. and Shamir. J.. Phase-only entropy-optimized filter generated by simulated annealing. Opt. Letr., 1989, 14, 1168-l 170.
25. Juday. R. D.. Optimal realizable filters and the minimum Euclidean principle. Appl. Opr.. 1993, 32, 5100-51 I I, 26. Laude. V. and Refregier, P.. Multicriterion characterization of coding domains with optimal Fourier spatial light
modulator filters. Appl. Opl., 1994. 33, 4465-4471. 27. Montes-Usategui, M.. Campos. J. and Juvells. 1.. Computation of arbitrarily constrained synthetic discriminant
functions. Appl. Opt., 1995. 34, 3904- 3914.
Binarized composite filter design 299
AUTHORS’ BIOGRAPHIES
Farld Ahmed was born in Bangladesh in 1965. He received his B.S. degree in Electrical Electronic Engineering in 1988 from Bangladesh University of Engineering and Technology (BUET), M.S. degree in Computer Science Engineering in 1993 from Wright State University, Dayton, OH, and Ph.D. in Electrical Engineering in 1996 from University of Dayton, OH. He is currently working as Assistant Professor of Electrical Engineering in Penn State, Erie, PA. His research interests include pattern recognition, optical and digital image processing, neural networks, wavelet transforms and digital design.
Mohammad A. Karim is the Chairperson and Professor of the Department of Electrical and Computer Engineering as well as the Director and Professor of the Electra-Optics Program at the University of Dayton, Ohio. He received his B.S. in Physics from University of Dacca, Bangladesh in 1976, and MS. in Physics and MS. in Electrical Engineering, and a Ph.D. in Electrical Engineering all from the University of Alabama respectively in 1978, 1979, and 1981. Dr. Karim authored the text books Electra-Optical Devices and Systems, Digital Design: A Pragmatic Approach, and Optical Computing: An Introduction and the reference book Electra-Optical Displays. He serves on the editorial boards of Microwave and Optical Technology Letters (USA) and Optics and Laser Technology (UK). Dr. Karim served as the guest editor for four journal special issues of Optical Engineering: on “Electra-optical Displays” (August 1990), on “Infrared Imaging Systems” (November 1991), on “Acquisition, Pointing and Tracking” (November 1993), on “Optical Remote Sensing and Image Processing” (November 1995), and one journal special issue of Optics and Laser Technology on “Optical Computing” in 1994. He is a senior member of the IEEE and a Fellow of both the OSA and SPIE.









![A Novel Improved Binarized Normed Gradients Based Objectness … · 2017-08-26 · Recently, Cheng et al. [10] put forward a fast and efficient binarized normed gradients, namely](https://img.pdfslide.us/doc/110x75/5faf36b5c4d3e310b653a81b/a-novel-improved-binarized-normed-gradients-based-objectness-2017-08-26-recently.jpg)