-
8/2/2019 Beam, Shell and Plates
1/23
Contents:
Textbook:References:
Topic 19Beam, Plate, andShell Elements-Part I Brief review of
major formulation approaches The degeneration of a
three-dimensional continuum tobeam and shell behavior Basic
kinematic and static assumptions used Formulation of isoparametric
(degenerate) general shellelements of variable thickness for large
displacementsand rotations Geometry and displacement interpolations
The nodal director vectors Use of f ive or six nodal point degrees
of freedom,theoretical considerations and practical use The
stress-strain law in shell analysis, transformationsused at shell
element integration points Shell transition elements, modeling of
transition zonesbetween solids and shells , shell intersections
Sections 6.3.4, 6.3.5The (degenerate) isoparametric shell and
beam elements, including thetransition elements, are presented and
evaluated inBathe, K. J., and S. Bolourchi, "A Geometric and
Material NonlinearPlate and Shell Element," Computers &
Structures, 11, 23-48, 1980.Bathe, K. J., and L. W. Ho, "Some
Results in the Analysis of Thin ShellStructures," in Nonlinear
Finite Element Analysis in StructuralMechanics, (Wunderlich, W., et
al., eds.), Springer-Verlag, 1981.Bathe, K. J., E. Dvorkin, and L.
W. Ho, "Our Discrete Kirchhoff and Isoparametric Shell Elements for
Nonlinear Analysis-An Assessment,"Computers & Structures, 16,
89-98, 1983.
-
8/2/2019 Beam, Shell and Plates
2/23
19-2 Beam, Plate and Shell Elements - Part I
References:(continued) The triangular flat plate/shell element
is presented and also studied in
Bathe, K. J., and L. W. Ho, "A Simple and Effective Element for
Analysis of General Shell Structures," Computers & Structures,
13, 673-681, 1981.
-
8/2/2019 Beam, Shell and Plates
3/23
STRUCTURAL ELEMENTS Beams Plates ShellsWe note that in
geometrically nonlinearanalysis, a plate (initially "flat
shell")develops shell action, and is analyzedas a shell.
Various solution approaches have been proposed: Use of general
beam and shelltheories that include the desirednonlinearities.
- With the governing differentialequations known,
variationalformulations can be derived anddiscretized using finite
elementprocedures.- Elegant approach, but difficultiesarise in
finite element formulations: Lack of generality Large number of
nodal degreesof freedom
Topic Nineteen 19-3
Transparency19-1
Transparency19-2
-
8/2/2019 Beam, Shell and Plates
4/23
19-4 Beam, Plate and Shell Elements - Part I
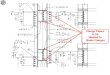
Transparency19-3 Use of simple elements, but a largenumber of
elements can modelcomplex beam and shell structures.- An example is
the use of 3-nodetriangular flat plate/membraneelements to model
complex shells.- Coupling between membrane andbending action is
only introducedat the element nodes.- Membrane action is not very
wellmodeled.
bendingf membraneartificial.ISs stiffnessI
~ / degree of freedom with\/_ artificial stiffness~ ' / . . zL 5
} ~ - -
xlX1
Stiffness matrix inlocal coordinatesystem (Xi).
Example:Transparency19-4
-
8/2/2019 Beam, Shell and Plates
5/23
Isoparametric (degenerate) beam andshell elements.- These are
derived from the 3-Dcontinuum mechanics equationsthat we discussed
earlier, but thebasic assumptions of beam andshell behavior are
imposed.- The resulting elements can beused to model quite general
beam
and shell structures.We will discuss this approach in
somedetail.
Basic approach: Use the total and updated Lagrangianformulations
developed earlier.
Topic Nineteen 19-5
Transparency19-5
Transparency19-6
-
8/2/2019 Beam, Shell and Plates
6/23
19-6 Beam, Plate and Shell Elements - Part I
Transparency19-7
Transparency19-8
We recall, for the T.L. formulation,f HAtS .. ~ H A t E .. 0dV _
HAt(jJ}Jov 0 II'U 0 II' - ;:ILLinearization
'v OC iirs oe rs 8 0 e i ~ dV +f,v J S i ~ 8o"ly.dV= HAtm - f,v
J S i ~ 8 o e y . dV
Also, for the U.L. formulation,J V H A ~ S i j . 8 H A ~ E i j .
tdV = HAtm
Linearization
Jv tCifs te rs 8tei} tdV +Jv~ i ~ 8 t ' T \ i j . tdV= H At9R -
f",t'Tij. 8tei}tdV
-
8/2/2019 Beam, Shell and Plates
7/23
Impose on these equations the basicassumptions of beam and shell
-action:1) Material particles originally on astraight line normal
to the midsurface of the beam (or shell)remain on that straight
linethroughout the response history.
For beams, "plane sections initiallynormal to the mid-surface
remainplane sections during the responsehistory".The effect of
transverse sheardeformations is included, andhence the lines
initially normal tothe mid-surface do not remainnormal to the
mid-surface duringthe deformations.
Topic Nineteen 19-7
Transparency19-9
Transparency19-10
-
8/2/2019 Beam, Shell and Plates
8/23
19-8 Beam, Plate and Shell Elements - Part I
Transparency19-11 time 0
not 90 in generaltime t
Transparency19-122) The stress in the direction "normal"to the
beam (or shell) mid-surface iszero throughout the response
history.
Note that here the stress along thematerial fiber that is
initially normalto the mid-surface is considered;because of shear
deformations, thismaterial fiber does not remainexactly normal to
the mid-surface.
3) The thickness of the beam (or shell)remains constant (we
assume smallstrain conditions but allow for largedisplacements and
rotations).
-
8/2/2019 Beam, Shell and Plates
9/23
Topic Nineteen 19-9
FORMULATION OFISOPARAMETRIC(DEGENERATE) SHELLELEMENTS To
incorporate the geometricassumptions of "straight lines normal
tothe mid-surface remain straight", and of"the shell thickness
remains constant"we use the appropriate geometric anddisplacement
interpolations.
To incorporate the condition of "zerostress normal to the
mid-surface" weuse the appropriate stress-strain law.
Transparency19-13
Transparency19-14
rX2t v = director vector at node kak = shell thickness at node
k(measured into direction of t v ~ )
Shell element geometryE x a m ~ : 9-node element
-
8/2/2019 Beam, Shell and Plates
10/23
19-10 Beam, Plate and Shell Elements - Part I
Transparency19-15
Element geometry definition: Input mid-surface nodal
pointcoordinates. Input all nodal director vectors at time O. Input
thicknesses at nodes.
Transparency19-16
r---X2- material particle(OXi)
Isoparametric coordinate system(r, s, t):- The coordinates rand
s aremeasured in the mid-surfacedefined by the nodal
pointcoordinates (as for a curvedmembrane element).- The coordinate
t is measured inthe direction of the director vectorat every point
in the shell.
s
-
8/2/2019 Beam, Shell and Plates
11/23
Topic Nineteen 19-11
Interpolation of geometry at time 0: Transparency19-17Nk ~ hk Xr
,+ k ~ a hk V ~ i
mid-surface effect of shellonly thicknessmaterialparticlewith
isoparametriccoordinates (r, s, t)hk = 2-D interpolation functions
(asfor 2-D plane stress, planestrain and axisymmetric elements)
X = nodal point coordinates V ~ i = components of V
Similarly, at time t, 0t-coordinatet h t k
-
8/2/2019 Beam, Shell and Plates
12/23
19-12 Beam, Plate and Shell Elements - Part I
Transparency19-19 To obtain the displacements of anymaterial
particle,t t 0Ui = Xi - Xi
HenceN NtUi = k ~ hk t u + k ~ ak hk C V ~ i - V ~ i )
wheret u - t x - x I - I I (disp. of nodal point k)
Transparency19-20
t V ~ i - V ~ i = change in direction cosinesof director vector
at node k
The incremental displacements fromtime t to time t+a t are,
similarly, forany material particle in the shellelement,U. - t+LltX
- tx1 - 1 I
whereu = incremental nodal point displacementsV ~ = t + L l t V
~ i - t V ~ i = incremental changein direction cosinesof director
vectorfrom time t to timet +Llt
-
8/2/2019 Beam, Shell and Plates
13/23
e3J---X2
To develop the strain-displacementtransformation matrices for
the T.L. andU.L. formulations, we need- the coordinate
interpolations for thematerial particles (OXil tXj).- the
interpolation of incrementaldisplacements from the incrementalnodal
point displacements androtations.Hence, express the V ~ in terms
ofnodal point rotations.
We define at each nodal point k thevectors O V and v ~ :- - v r
~ v
vk0\ Ik e2 x n 0Vk2 = 0Vkn X 0Vk1y 1= IIe2 x V ~ 1 I 2 , - -
-The vectors v ~ , V and V aretherefore mutually perpendicular.
Topic Nineteen 19-13
Transparency19-21
Transparency19-22
-
8/2/2019 Beam, Shell and Plates
14/23
19-14 Beam, Plate and Shell Elements - Part I
Transparency19-23
Transparency19-24
Then let
-
8/2/2019 Beam, Shell and Plates
15/23
Once the incremental nodal pointdisplacements and rotations have
beencalculated from the solution of the finiteelement system
equilibrium equations,we calculate the new director vectorsusingt +
. : l t v ~ = t v +1 ( _ T V ~ dak+T V d ~ k )L
a k , ~ k
and normalize length
Nodal point degrees of freedom: We have only five degrees
offreedom per node:- three translations in the Cartesiancoordinate
directions- two rotations referred to the localnodal point vectors
t v ~ , t v
The nodal point vectors t v ~ , t v change directions in a
geometricallynonlinear solution.
Topic Nineteen 1915
Transparency19-25
Transparency19-26
-
8/2/2019 Beam, Shell and Plates
16/23
1916 Beam, Plate andShell Elements - Part I
Transparency19-27~
- Node k is sharedby four shell elements
Transparency19-28no physicalstiffness
- Node k is sharedby four shell elements- One director
vector
l ~ at node k- No physical stiffnesscorresponding torotation
about l ~ ~ .
-
8/2/2019 Beam, Shell and Plates
17/23
~
~
- Node k is sharedby four shell elements- One director
vector
t ~ at node k- No physical stiffnesscorresponding torotation
about t ~ ~ .
Topic Nineteen 19-17
Transparency19-29
If only shell elements connect tonode k, and the node is
notsubjected to boundary prescribedrotations, we only assign
fivelocal degrees of freedom to thatnode. We transform the two
nodal rotationsto the three Cartesian axes in orderto- connect a
beam element (threerotational degrees of freedom) or
- impose a boundary rotation (otherthan ak or r3k) at that
node.
Transparency19-30
-
8/2/2019 Beam, Shell and Plates
18/23
19-18 Beam, Plate and Shell Elements - Part I
Transparency19-31 The above interpolations of Xi, tXi , Uiare
employed to establish the straindisplacement transformation
matricescorresponding to the Cartesian straincomponents, as in the
analysis of 3-Dsolids.
Transparency19-32
Using the expression oe.. derived earlierthe exact linear s t r
a i n - d i ~ p l a c e m e n tmatrix JB l is obtained.However,
using OUk,i OU k,} to develop thenonlinear strain-displacement
matrixJB Nl , only an approximation to the exactsecond-order
strain-displacement rotationexpression is obtained because the
internal element displacements depend nonlinearly on the nodal
point rotations.The same conclusion holds for the
U.L.formulation.
-
8/2/2019 Beam, Shell and Plates
19/23
We still need to impose the conditionthat the stress in the
direction"normal" to the shell mid-surface iszero.We use the
direction of the directorvector as the "normal direction."
~ ~
_ es x eter = lies x etl12 ' es = et x erWe note: er, es, et are
not mutuallyperpendicular in general.er , es , et are constructed
tobe mutually perpendicular.
Topic Nineteen 19-19
Transparency19-33
Transparency19-34
-
8/2/2019 Beam, Shell and Plates
20/23
19-20 Beam, Plate and Shell Elements - Part I
Transparency19-35Then the stress-strain law used is, fora linear
elastic material,
1 v 01 0osymmetric
000000000
1 - v 0 0-2- kC2v) 0
kC2v)
Transparency19-36
k = shear correction factor
whererow 1 (e,)2 (m,)2 (n,)2 elm, m,n, n,e,------------------
--------- ---- ---- -------- -- ------ -- -----------
QSh = :
usingf 1 = cos ( ~ 1 , gr) rn1 = cos ( ~ gr) n1 = cos ( ~ a ,
gr)f 2 = cos ( ~ 1 , gs) rn2 = cos ( ~ gs) n2 = cos ( ~ a , ~ fa =
cos ( ~ 1 , ~ t rna = cos ( ~ ~ t na = cos ( ~ a , ~ t
-
8/2/2019 Beam, Shell and Plates
21/23
The columns and rows 1 to 3 in CShreflect that the stress
"normal" to theshell mid-surface is zero. The stress-strain matrix
for plasticityand creep solutions is similarlyobtained by
calculating the stressstrain matrix as in the analysis of
3-Dsolids, and then imposing thecondition that the stress "normal"
tothe mid-surface is zero.
Regarding the kinematic description ofthe shell element,
transition elementscan also be developed. Transition elements are
elements withsome mid-surface nodes (andassociated director vectors
and fivedegrees of freedom per node) andsome top and bottom surface
nodes(with three translational degrees offreedom per node). These
elementsare used
- to model shell-to-solid transitions- to model shell
intersections
Topic Nineteen 19-21
Transparency19-37
Transparency19-38
-
8/2/2019 Beam, Shell and Plates
22/23
19-22 Beam, Plate and Shell Elements - Part I
Transparency19-39
a) Shell intersectionTransparency19-40
b) Solid-shell intersection
-
8/2/2019 Beam, Shell and Plates
23/23
MIT OpenCourseWarehttp://ocw.mit.edu
Resource: Finite Element Procedures for Solids and
StructuresKlaus-Jrgen Bathe
The following may not correspond to a particular course on MIT
OpenCourseWare, but has beenprovided by the author as an individual
learning resource.
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
http://ocw.mit.edu/http://ocw.mit.edu/termshttp://ocw.mit.edu/termshttp://ocw.mit.edu/