Embed Size (px)
Citation preview

CG:YRF, Chapel Hill, NC, USA, June 16-20, 2012
Balancing Controllers’ Workload by Locally Redesigning Airspace Sectors
Irina Kostitsyna∗ Joseph Mitchell† Girishkumar Sabhnani‡
Abstract
We study an Airspace Resectorization Problem (ARP).A sectorization is a subdivision of an airspace into sec-tors, each managed by an airtraffic controller. A well-balanced sectorization is a sectorization that distributesthe workload evenly among the controllers. We dis-cuss the problem of generating optimal sectorizationsand describe GeoSect-Local, a tool that improves agiven sectorization by local adjustments. Finally, wepresent experimental results showing that GeoSect-Local produces sectors with “nice” geometric proper-ties and well-balanced workload distribution.
1 Introduction
The US National Airspace System (NAS) is partitionedinto 22 Air Route Traffic Control Centers, each sub-divided into sectors, which are overseen by air trafficcontrollers. A “well-balanced” sectorization distributesworkload evenly among the sectors/controllers. Goodsectorizations should conform with the traffic “flows” ofaircraft, and the sectors should have “nice” geometricproperties. As traffic patterns change, a sectorizationmay become imbalanced and need to be modified.
One approach to handle changes in traffic/weather isto design a new sectorization from scratch using meth-ods for “clean-sheet” sectorization (e.g., [1], [6], [5]).Such methods concentrate on new traffic patterns, whilediscarding the old sectorization. However, a clean-sheetredesign is undesirable for human factors issues, sinceit is important for controllers to be familiar with thesector geometry and traffic patterns.
A different approach we take here is to perform localrebalancing of the exsisting sectorization, without intro-ducing dramatic changes to the sectors. A related ap-proach ([2]) shifts pre-specified thin subsectors betweenadjacent sectors.
2 Problem Statement
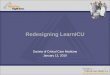
Our method for the ARP introduces the following re-quirements (Fig. 1): 1. Sector geometry: (s1) inte-
∗Department of Computer Science, Stony Brook University,[email protected]†Department of Applied Mathematics and Statistics, Stony
Brook University, [email protected]‡[email protected]
rior angles must be between αmin and αmax, (s2) sectoredges have length ≥ emin, (s3) the ratio of a sector’sarea to the area of its convex hull ≥ c, etc. 2. Flow con-formance: (f1) tracks cross sector boundaries at angle≤ βmax, (f2) tracks are at distance ≥ d1 from sectorvertices, (f3) track crossing points are at distance ≥ d2from sector boundaries, (f4) tracks have length ≥ ddwell
within each sector, etc. 3. Workload: (w1) the averageaircraft count in each sector ≤ Wavg, (w1) the maxi-mum aircraft count in each sector ≥ Wmax, (w3) theaverage aircraft delay ≤ D, etc.
Figure 1: Geometry of sectors, traffic flows.
By choosing different sets of these requirements weget different variations of ARP. By a simple reductionfrom PARTITION, it follows that, even in simple caseswith only 2 requirements ((f3) and (w1)), the problem ofdesigning a new sectorization is weakly NP-hard. Thisimplies that the problem of rebalancing an existing sec-torization is also weakly NP-hard.
Because the number of tracks in a given region canbe very large, it is often impossible to satisfy all therestrictions for each track. In this case we try to satisfythe requirements for as many tracks as possible. Forthat purpose we extract dominant flows, i.e., flows thatrepresent prominent clusters of traffic (see, e.g.,[3]).
3 Rebalancing Heuristic
To estimate the quality of a sectorization we introduce acost function for each sector, which is a linear combina-tion of penalty functions of the requirements discussedabove. For each of the requirements we introduce aparameter with an adjustable threshold and a “physi-cal” limit (for example, 2π for max angle). When theparameter is within a permitted range, correspondingpenalty function is zero; when it goes above (below) thethreshold, the penalty function becomes a fast growingfunction approaching ∞ when the value is reaching thelimit.
This is an abstract of a presentation given at CG:YRF 2012. It has been made public for the benefit of the community and should be considered a preprint ratherthan a formally reviewed paper. Thus, this work is expected to appear in a conference with formal proceedings and/or in a journal.

1st Computational Geometry Young Researchers Forum, 2012
GeoSect-Local iterates over the vertices of the sec-torization, trying to move them locally to minimize thecosts of adjacent sectors. The process stops at a localminimum, when no further improvement can be made.By changing the weights of different penalty functions,we can emphasize the importance of the correspondingrequirements.
4 Experimental Results
In the experiments presented below we concentrateon minimizing the average traffic delay by puttinghigher weight on the corresponding penalty function inGeoSect-Local. Delay is caused by sectors becoming“full” (and hence closed to traffic), when the aircraftcount exceeds the “capacity”. We use an establishedestimate of sector capacity [4].
We started with four different initial sectorizations (6sectors each) of the Kansas City (ZKC) center. We usedone “real” (or baseline) sectorization and three syntheticsectorizations of different topologies.
Avg Max StDev
B RB B RB B RB
min sec ∠ 2.1 1.6 3.5 2.4 0.9 0.7max sec ∠ 4.3 0.2 8.4 1.0 2.3 0.4edge length 3.9 0.5 10.4 2.9 4.1 1.2dist to CPs1 3.7 1.9 11.7 6.5 5.1 2.4dist to DFs1 32.3 0.8 50.7 2.4 10.8 1.0min ∠ w/ DFs 7.1 0.8 14.8 4.8 6.4 1.9min dwell 0.2 0 1.4 0 0.6 0est. delay 33.7 3.8 187.3 8.4 75.3 3.4
total cost: 87.3 9.5 221.2 11.5 65.9 1.5
Table 1: Comparisons of penalties of baseline sectorizationbefore (B) and after (RB) rebalancing.
Max Avg StdDev
B 15.7 7.767 4.297RB 8 6.983 0.685RS1 7.9 6.833 0.838RS2 9.5 7.283 3.620RS3 7.3 6.35 1.379
Table 2: Comparisons of estimated delays: B (baseline),RB (rebalance baseline), RS1-3 (rebalanced synthetic sec-torizations)
Table 1 compares parameters’ penalties for the base-line sectorization (before and after rebalancing). Thereare improvements in average and maximum values aswell as in standard deviation of penalties for all the pa-rameters. Table 2 compares the estimated delays of thebaseline sectorization (before and after rebalancing) andthree synthetic sectorizations after rebalancing. Thevariances in the results depend on the topology of ini-tial sectorizations. However, all sectorizations produced
1CP–critical point, DF–dominant flow
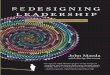
by GeoSect-Local improve the average delay over allsectors and reduce the maximum delay by 40%-55%.Fig. 2 shows the baseline sectorization before and afterrebalancing.
Figure 2: Baseline sectorization before and after rebalanc-ing. Numbers in sectors are costs.
5 Conclusion
We developed GeoSect-Local, a highly configurabletool that produces high quality sectorizations. Theresult depends on the choice of initial sectorizations(more specifically on their topology, and to a less de-gree on their exact geometry). In all the experimentsGeoSect-Local significantly reduced the average de-lay and the sectors had “nice” geometric properties.
This method can be applied to get a sectorization thatcontinuously adapts to changing traffic, and to producerobust sectorizations under uncertain traffic patterns.This is currently work in progress.
References
[1] A. Basu, J. S. B. Mitchell, and G. Sabhnani. Geomet-ric algorithms for optimal airspace design and air trafficcontroller workload balancing. ACM J. Experimental Al-gorithmics, 14:2.3–2.28, 2009.
[2] A. Klein, M. Rodgers, and H. Kaing. Dynamic fpas: Anew method for dynamic airspace configuration. ICNS2008.
[3] G. Sabhnani, A. Yousefi, I. Kostitsyna, J. S. B. Mitchell,and V. Polishchuk. Algorithmic traffic abstraction andits application to nextgen generic airspace. ATIO 2010.
[4] J. D. Welch, J. W. Andrews, B. D. Martin, B. Sridhar,and M. Field. Macroscopic workload model for estimat-ing en route sector capacity. ATM 2007.
[5] M. Xue. Airspace sector redesign based on voronoi dia-grams. J. Aerospace Computing, Information, and Com-munication, 6(12):624–634, 2009.
[6] A. Yousefi and G. Donohue. Optimum airspace sector-ization with air traffic controller workload constraints. In1st International Conference for Research in Air Trans-portation, 2004.