Embed Size (px)
Citation preview
Backpropagation: The Good, the Bad and theUgly
Keith L. Downing
The Norwegian University of Science and Technology (NTNU)Trondheim, [email protected]
October 8, 2018
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Supervised Learning
Constant feedback from an instructor, indicating not only right/wrong,but also the correct answer for each training case.
Many cases (i.e., input-output pairs) to be learned.
Weights are modified by a complex procedure (back-propagation)based on output error.
Feed-forward networks with back-propagation learning are the standardimplementation.
99% of neural network applications use this.
Typical usage: problems with a) lots of input-output training data, and b)goal of a mapping (function) from inputs to outputs.
Not biologically plausible, although the cerebellum appears to exhibitsome aspects.
But, the result of backprop, a trained ANN to perform some function,can be very useful to neuroscientists as a sufficiency proof.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
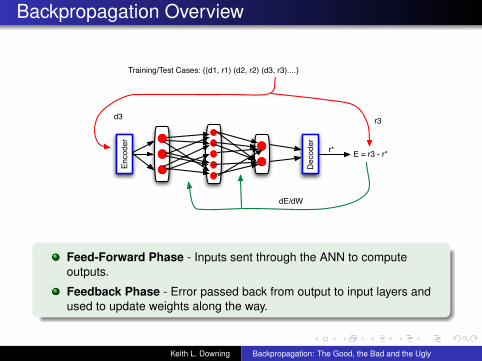
Backpropagation Overview
Enco
der
Deco
der
E = r3 - r*r*
r3d3
Training/Test Cases: {(d1, r1) (d2, r2) (d3, r3)....}
dE/dW
Feed-Forward Phase - Inputs sent through the ANN to computeoutputs.
Feedback Phase - Error passed back from output to input layers andused to update weights along the way.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
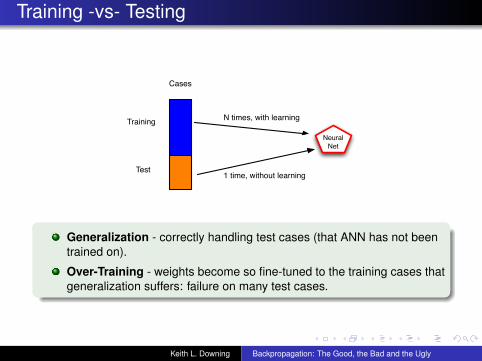
Training -vs- Testing
Training
Test
Cases
Neural Net
N times, with learning
1 time, without learning
Generalization - correctly handling test cases (that ANN has not beentrained on).
Over-Training - weights become so fine-tuned to the training cases thatgeneralization suffers: failure on many test cases.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Widrow-Hoff (a.k.a. Delta) Rule
0
1
0
Y
S
1
2 3
w
X
Y
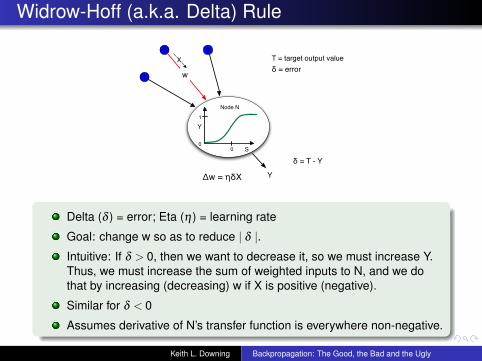
T = target output value δ = error
δ = T - Y
Δw = ηδX
Node N
Delta (δ ) = error; Eta (η) = learning rate
Goal: change w so as to reduce | δ |.Intuitive: If δ > 0, then we want to decrease it, so we must increase Y.Thus, we must increase the sum of weighted inputs to N, and we dothat by increasing (decreasing) w if X is positive (negative).
Similar for δ < 0
Assumes derivative of N’s transfer function is everywhere non-negative.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Gradient Descent
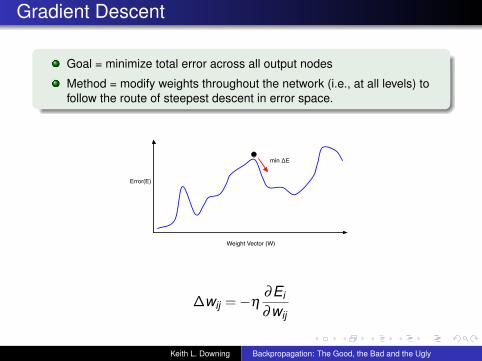
Goal = minimize total error across all output nodes
Method = modify weights throughout the network (i.e., at all levels) tofollow the route of steepest descent in error space.
Error(E)
Weight Vector (W)
min ΔE
∆wij =−η∂Ei
∂wij
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing ∂Ei∂wij
i
1
oid
tid
Eid
x1dwi1
n
xndwin
sumid
fT
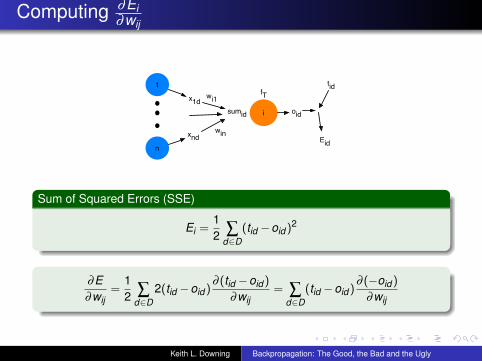
Sum of Squared Errors (SSE)
Ei =12 ∑
d∈D(tid −oid )2
∂E∂wij
=12 ∑
d∈D2(tid −oid )
∂ (tid −oid )
∂wij= ∑
d∈D(tid −oid )
∂ (−oid )
∂wij
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing ∂ (−oid )∂wij
i
1
oid
tid
Eid
x1dwi1
n
xndwin
sumid
fT
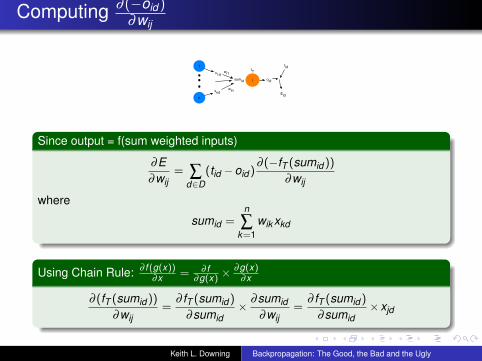
Since output = f(sum weighted inputs)
∂E∂wij
= ∑d∈D
(tid −oid )∂ (−fT (sumid ))
∂wij
where
sumid =n
∑k=1
wik xkd
Using Chain Rule: ∂ f (g(x))∂x = ∂ f
∂g(x) ×∂g(x)
∂x
∂ (fT (sumid ))
∂wij=
∂ fT (sumid )
∂sumid× ∂sumid
∂wij=
∂ fT (sumid )
∂sumid×xjd
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
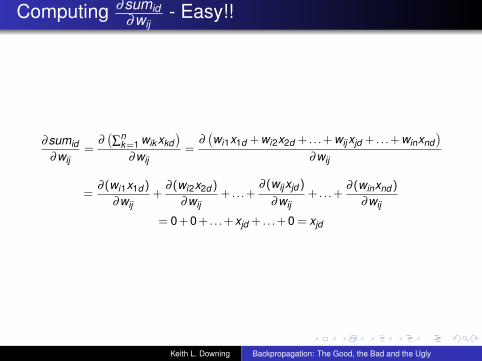
Computing ∂sumid∂wij
- Easy!!
∂sumid∂wij
=∂(∑
nk=1 wik xkd
)∂wij
=∂(wi1x1d + wi2x2d + . . .+ wijxjd + . . .+ winxnd
)∂wij
=∂ (wi1x1d )
∂wij+
∂ (wi2x2d )
∂wij+ . . .+
∂ (wijxjd )
∂wij+ . . .+
∂ (winxnd )
∂wij
= 0 + 0 + . . .+ xjd + . . .+ 0 = xjd
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
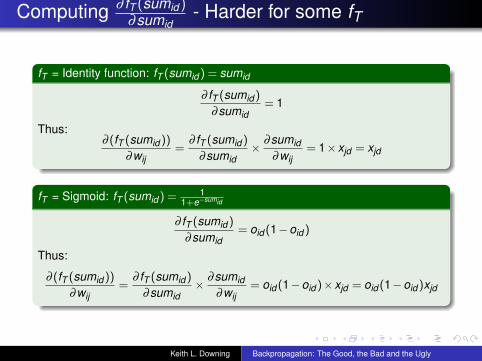
Computing ∂ fT (sumid )∂sumid
- Harder for some fT
fT = Identity function: fT (sumid ) = sumid
∂ fT (sumid )
∂sumid= 1
Thus:∂ (fT (sumid ))
∂wij=
∂ fT (sumid )
∂sumid× ∂sumid
∂wij= 1×xjd = xjd
fT = Sigmoid: fT (sumid ) = 11+e−sumid
∂ fT (sumid )
∂sumid= oid (1−oid )
Thus:
∂ (fT (sumid ))
∂wij=
∂ fT (sumid )
∂sumid× ∂sumid
∂wij= oid (1−oid )×xjd = oid (1−oid )xjd
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
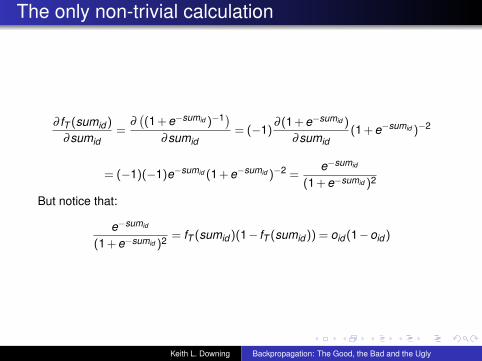
The only non-trivial calculation
∂ fT (sumid )
∂sumid=
∂((1 + e−sumid )−1)
∂sumid= (−1)
∂ (1 + e−sumid )
∂sumid(1 + e−sumid )−2
= (−1)(−1)e−sumid (1 + e−sumid )−2 =e−sumid
(1 + e−sumid )2
But notice that:
e−sumid
(1 + e−sumid )2 = fT (sumid )(1− fT (sumid )) = oid (1−oid )
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
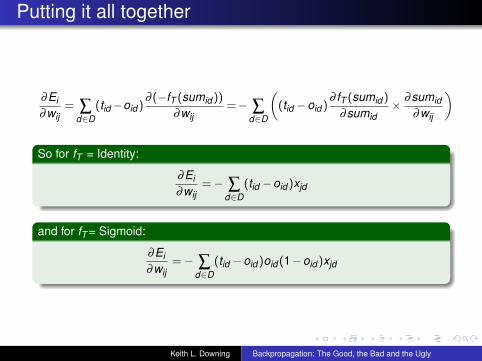
Putting it all together
∂Ei∂wij
= ∑d∈D
(tid−oid )∂ (−fT (sumid ))
∂wij=− ∑
d∈D
((tid −oid )
∂ fT (sumid )
∂sumid× ∂sumid
∂wij
)
So for fT = Identity:
∂Ei∂wij
=− ∑d∈D
(tid −oid )xjd
and for fT = Sigmoid:
∂Ei∂wij
=− ∑d∈D
(tid −oid )oid (1−oid )xjd
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Weight Updates (fT = Sigmoid)
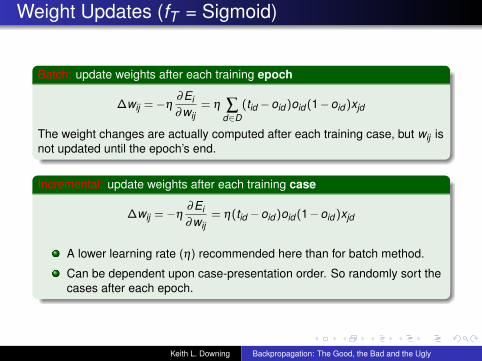
Batch: update weights after each training epoch
∆wij =−η∂Ei∂wij
= η ∑d∈D
(tid −oid )oid (1−oid )xjd
The weight changes are actually computed after each training case, but wij isnot updated until the epoch’s end.
Incremental: update weights after each training case
∆wij =−η∂Ei∂wij
= η(tid −oid )oid (1−oid )xjd
A lower learning rate (η) recommended here than for batch method.
Can be dependent upon case-presentation order. So randomly sort thecases after each epoch.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Backpropagation in Multi-Layered Neural Networks
1
n
jsumjdojd
wnj
w1j
d(ojd)
d(sumjd)
d(sumnd)
d(ojd)
d(sum1d)
d(ojd)
d(Ed)
d(sum1d)
d(Ed)
d(sumnd)
Ed
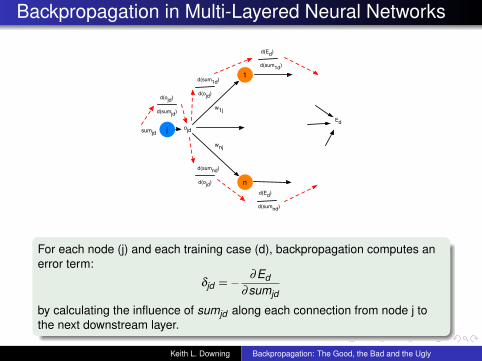
For each node (j) and each training case (d), backpropagation computes anerror term:
δjd =− ∂Ed∂sumjd
by calculating the influence of sumjd along each connection from node j tothe next downstream layer.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing δjd
1
n
jsumjdojd
wnj
w1j
d(ojd)
d(sumjd)
d(sumnd)
d(ojd)
d(sum1d)
d(ojd)
d(Ed)
d(sum1d)
d(Ed)
d(sumnd)
Ed
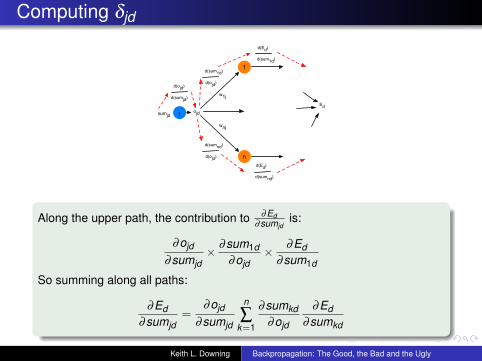
Along the upper path, the contribution to ∂Ed∂sumjd
is:
∂ojd
∂sumjd× ∂sum1d
∂ojd× ∂Ed
∂sum1d
So summing along all paths:
∂Ed∂sumjd
=∂ojd
∂sumjd
n
∑k=1
∂sumkd∂ojd
∂Ed∂sumkd
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing δjd
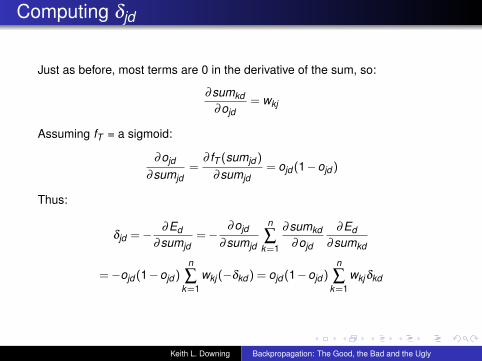
Just as before, most terms are 0 in the derivative of the sum, so:
∂sumkd∂ojd
= wkj
Assuming fT = a sigmoid:
∂ojd
∂sumjd=
∂ fT (sumjd )
∂sumjd= ojd (1−ojd )
Thus:
δjd =− ∂Ed∂sumjd
=−∂ojd
∂sumjd
n
∑k=1
∂sumkd∂ojd
∂Ed∂sumkd
=−ojd (1−ojd )n
∑k=1
wkj (−δkd ) = ojd (1−ojd )n
∑k=1
wkj δkd
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing δjd
Note that δjd is defined recursively in terms of the δ values inthe next downstream layer:
δjd = ojd (1−ojd )n
∑k=1
wkjδkd
So all δ values in the network can be computed by movingbackwards, one layer at a time.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing ∂Ed∂wij
from δjd - Easy!!
j iwij
d(Ed)
d(sumid)
1
ojd
wi1
sumid
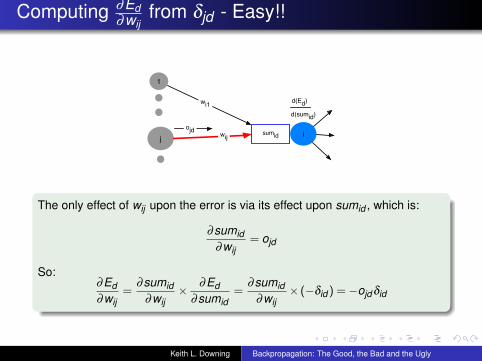
The only effect of wij upon the error is via its effect upon sumid , which is:
∂sumid∂wij
= ojd
So:∂Ed∂wij
=∂sumid
∂wij× ∂Ed
∂sumid=
∂sumid∂wij
× (−δid ) =−ojd δid
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Computing ∆wij
Given an error term, δid (for node i on training case d), theupdate of wij for all nodes j that feed into i is:
∆wij =−η∂Ed
∂wij=−η(−ojd δid ) = ηδidojd
So given δi , you can easily calculate ∆wij for all incoming arcs.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Learning XOR
0 200 400 600 800 1000
Epoch
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Err
or
Sum-Squared-Error
Error
0 200 400 600 800 1000
Epoch
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Err
or
Sum-Squared-Error
Error
0 200 400 600 800 1000
Epoch
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Err
or
Sum-Squared-Error
Error
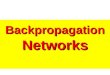
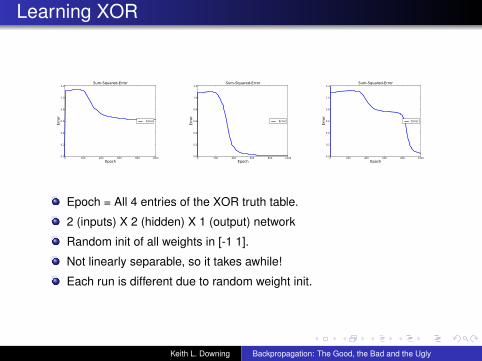
Epoch = All 4 entries of the XOR truth table.
2 (inputs) X 2 (hidden) X 1 (output) network
Random init of all weights in [-1 1].
Not linearly separable, so it takes awhile!
Each run is different due to random weight init.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
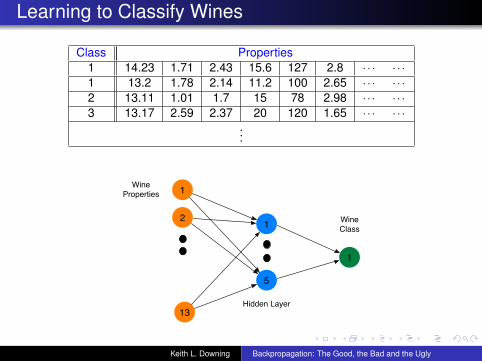
Learning to Classify Wines
Class Properties1 14.23 1.71 2.43 15.6 127 2.8 · · · · · ·1 13.2 1.78 2.14 11.2 100 2.65 · · · · · ·2 13.11 1.01 1.7 15 78 2.98 · · · · · ·3 13.17 2.59 2.37 20 120 1.65 · · · · · ·
...
1
1
5
2
13
1
WineProperties
WineClass
Hidden Layer
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
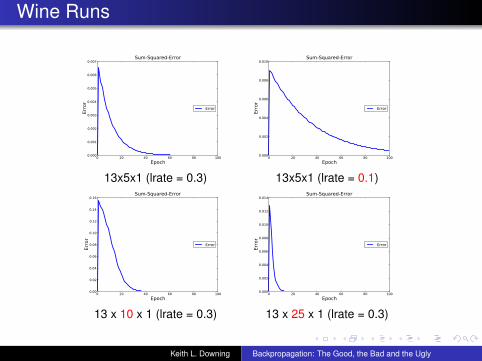
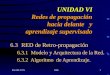
Wine Runs
0 20 40 60 80 100
Epoch
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
Err
or
Sum-Squared-Error
Error
0 20 40 60 80 100
Epoch
0.000
0.002
0.004
0.006
0.008
0.010
Err
or
Sum-Squared-Error
Error
13x5x1 (lrate = 0.3) 13x5x1 (lrate = 0.1)
0 20 40 60 80 100
Epoch
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
Err
or
Sum-Squared-Error
Error
0 20 40 60 80 100
Epoch
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
Err
or
Sum-Squared-Error
Error
13 x 10 x 1 (lrate = 0.3) 13 x 25 x 1 (lrate = 0.3)
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
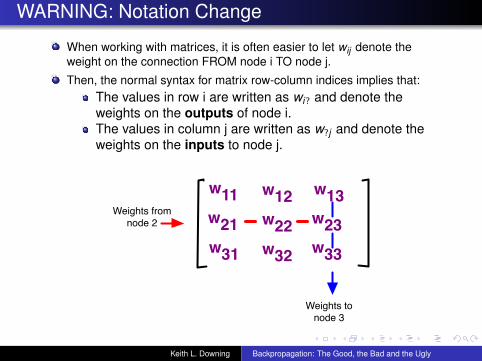
WARNING: Notation Change
When working with matrices, it is often easier to let wij denote theweight on the connection FROM node i TO node j.
Then, the normal syntax for matrix row-column indices implies that:The values in row i are written as wi? and denote theweights on the outputs of node i.The values in column j are written as w?j and denote theweights on the inputs to node j.
w11w21w31
w12w22w32
w13w23w33
Weights from node 2
Weights to node 3
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
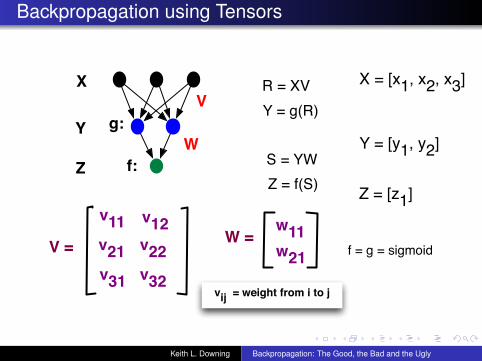
Backpropagation using Tensors
X
Y
Z f:
g:V
W
X = [x1, x2, x3]
Y = [y1, y2]
Z = [z1]v11v21v31
v12v22v32
V = w11w21
W =
R = XV
S = YW
Y = g(R)
Z = f(S)
f = g = sigmoid
vij = weight from i to j
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
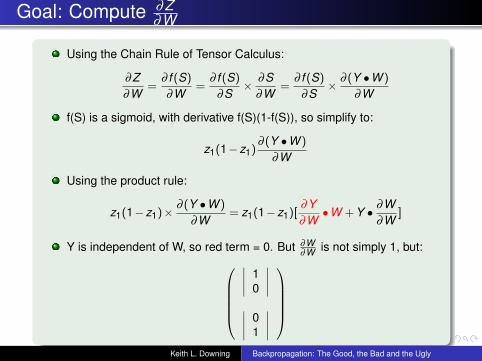
Goal: Compute ∂Z∂W
Using the Chain Rule of Tensor Calculus:
∂Z∂W
=∂ f (S)
∂W=
∂ f (S)
∂S× ∂S
∂W=
∂ f (S)
∂S× ∂ (Y •W )
∂W
f(S) is a sigmoid, with derivative f(S)(1-f(S)), so simplify to:
z1(1−z1)∂ (Y •W )
∂W
Using the product rule:
z1(1−z1)× ∂ (Y •W )
∂W= z1(1−z1)[
∂Y∂W•W + Y • ∂W
∂W]
Y is independent of W, so red term = 0. But ∂W∂W is not simply 1, but:
∣∣∣∣ 10
∣∣∣∣∣∣∣∣ 0
1
∣∣∣∣
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
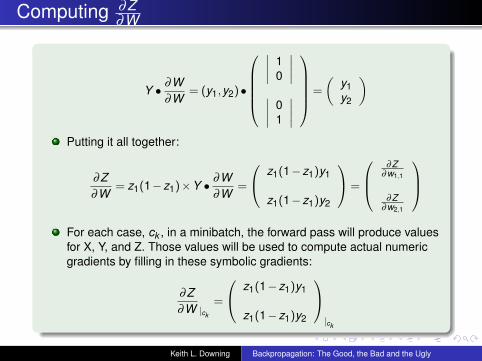
Computing ∂Z∂W
Y • ∂W∂W
= (y1,y2)•
∣∣∣∣ 1
0
∣∣∣∣∣∣∣∣ 0
1
∣∣∣∣
=
(y1y2
)
Putting it all together:
∂Z∂W
= z1(1−z1)×Y • ∂W∂W
=
z1(1−z1)y1
z1(1−z1)y2
=
∂Z
∂w1,1
∂Z∂w2,1
For each case, ck , in a minibatch, the forward pass will produce valuesfor X, Y, and Z. Those values will be used to compute actual numericgradients by filling in these symbolic gradients:
∂Z∂W |ck
=
z1(1−z1)y1
z1(1−z1)y2
|ck
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
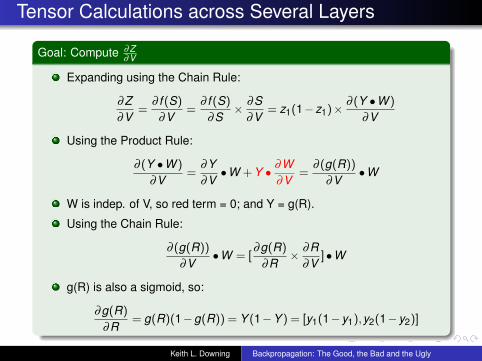
Tensor Calculations across Several Layers
Goal: Compute ∂Z∂V
Expanding using the Chain Rule:
∂Z∂V
=∂ f (S)
∂V=
∂ f (S)
∂S× ∂S
∂V= z1(1−z1)× ∂ (Y •W )
∂V
Using the Product Rule:
∂ (Y •W )
∂V=
∂Y∂V•W + Y • ∂W
∂V=
∂ (g(R))
∂V•W
W is indep. of V, so red term = 0; and Y = g(R).
Using the Chain Rule:
∂ (g(R))
∂V•W = [
∂g(R)
∂R× ∂R
∂V]•W
g(R) is also a sigmoid, so:
∂g(R)
∂R= g(R)(1−g(R)) = Y (1−Y ) = [y1(1−y1),y2(1−y2)]
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
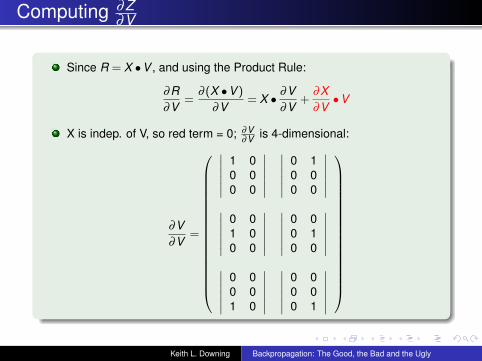
Computing ∂Z∂V
Since R = X •V , and using the Product Rule:
∂R∂V
=∂ (X •V )
∂V= X • ∂V
∂V+
∂X∂V•V
X is indep. of V, so red term = 0; ∂V∂V is 4-dimensional:
∂V∂V
=
∣∣∣∣∣∣1 00 00 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 10 00 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 01 00 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 00 10 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 00 01 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 00 00 1
∣∣∣∣∣∣
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
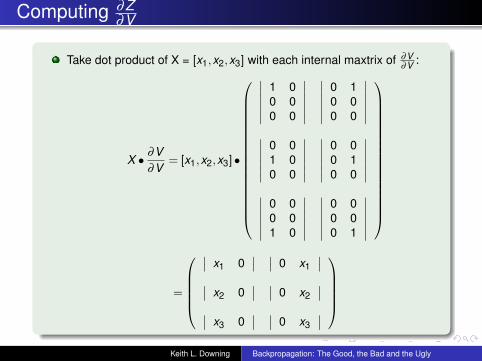
Computing ∂Z∂V
Take dot product of X = [x1,x2,x3] with each internal maxtrix of ∂V∂V :
X • ∂V∂V
= [x1,x2,x3]•
∣∣∣∣∣∣1 00 00 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 10 00 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 01 00 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 00 10 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 00 01 0
∣∣∣∣∣∣∣∣∣∣∣∣
0 00 00 1
∣∣∣∣∣∣
=
∣∣ x1 0
∣∣ ∣∣ 0 x1∣∣∣∣ x2 0
∣∣ ∣∣ 0 x2∣∣∣∣ x3 0
∣∣ ∣∣ 0 x3∣∣
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
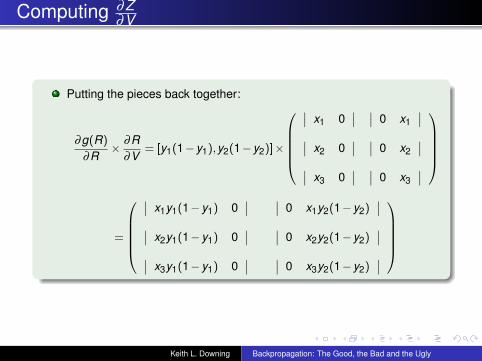
Computing ∂Z∂V
Putting the pieces back together:
∂g(R)
∂R× ∂R
∂V= [y1(1−y1),y2(1−y2)]×
∣∣ x1 0
∣∣ ∣∣ 0 x1∣∣∣∣ x2 0
∣∣ ∣∣ 0 x2∣∣∣∣ x3 0
∣∣ ∣∣ 0 x3∣∣
=
∣∣ x1y1(1−y1) 0
∣∣ ∣∣ 0 x1y2(1−y2)∣∣∣∣ x2y1(1−y1) 0
∣∣ ∣∣ 0 x2y2(1−y2)∣∣∣∣ x3y1(1−y1) 0
∣∣ ∣∣ 0 x3y2(1−y2)∣∣
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
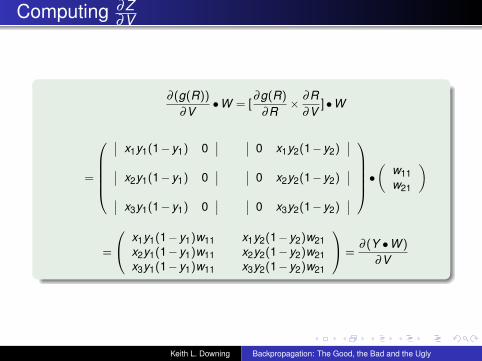
Computing ∂Z∂V
∂ (g(R))
∂V•W = [
∂g(R)
∂R× ∂R
∂V]•W
=
∣∣ x1y1(1−y1) 0
∣∣ ∣∣ 0 x1y2(1−y2)∣∣∣∣ x2y1(1−y1) 0
∣∣ ∣∣ 0 x2y2(1−y2)∣∣∣∣ x3y1(1−y1) 0
∣∣ ∣∣ 0 x3y2(1−y2)∣∣
•(
w11w21
)
=
x1y1(1−y1)w11 x1y2(1−y2)w21x2y1(1−y1)w11 x2y2(1−y2)w21x3y1(1−y1)w11 x3y2(1−y2)w21
=∂ (Y •W )
∂V
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
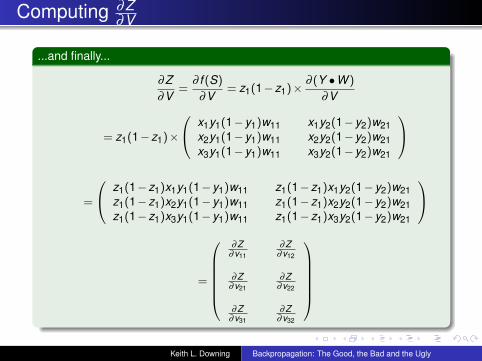
Computing ∂Z∂V
...and finally...
∂Z∂V
=∂ f (S)
∂V= z1(1−z1)× ∂ (Y •W )
∂V
= z1(1−z1)×
x1y1(1−y1)w11 x1y2(1−y2)w21x2y1(1−y1)w11 x2y2(1−y2)w21x3y1(1−y1)w11 x3y2(1−y2)w21
=
z1(1−z1)x1y1(1−y1)w11 z1(1−z1)x1y2(1−y2)w21z1(1−z1)x2y1(1−y1)w11 z1(1−z1)x2y2(1−y2)w21z1(1−z1)x3y1(1−y1)w11 z1(1−z1)x3y2(1−y2)w21
=
∂Z
∂v11
∂Z∂v12
∂Z∂v21
∂Z∂v22
∂Z∂v31
∂Z∂v32
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Gradients and the Minibatch
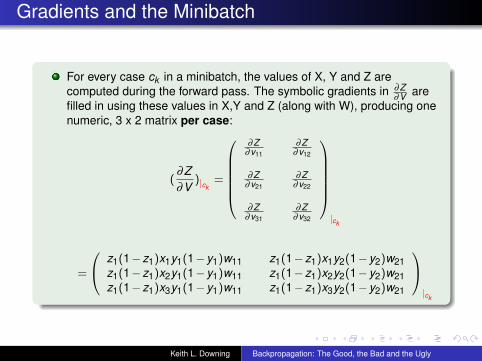
For every case ck in a minibatch, the values of X, Y and Z arecomputed during the forward pass. The symbolic gradients in ∂Z
∂V arefilled in using these values in X,Y and Z (along with W), producing onenumeric, 3 x 2 matrix per case:
(∂Z∂V
)|ck=
∂Z
∂v11
∂Z∂v12
∂Z∂v21
∂Z∂v22
∂Z∂v31
∂Z∂v32
|ck
=
z1(1−z1)x1y1(1−y1)w11 z1(1−z1)x1y2(1−y2)w21z1(1−z1)x2y1(1−y1)w11 z1(1−z1)x2y2(1−y2)w21z1(1−z1)x3y1(1−y1)w11 z1(1−z1)x3y2(1−y2)w21
|ck
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Gradients and the Minibatch
In most Deep Learning situations, the gradients will be based on a lossfunction, L, not simply the output of the final layer. But that’s just onemore level of derivative calculations.
At the completion of a minibatch, the numeric gradient matrices areadded together to yield the complete gradient, which is then used toupdate the weights.
For any weight matrix U in the network, and minibatch M, update weightui ,j as follows:
(∂L
∂ui ,j)|M = ∑
ck∈M(
∂L∂ui ,j
)|ck
η = learning rate
4ui ,j =−η(∂L
∂ui ,j)|M
Tensorflow and Theano do all of this for you.
Everytime you write Deep Learning code, be grateful!!
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
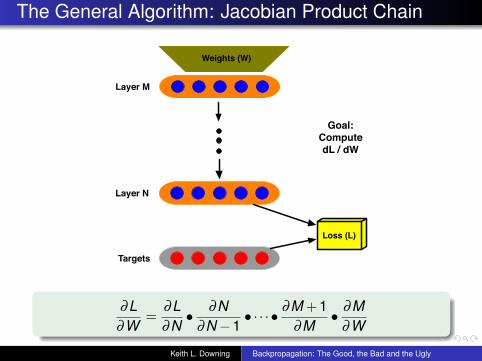
The General Algorithm: Jacobian Product Chain
Weights (W)
Targets
Layer N
Layer M
Loss (L)
Goal: Compute dL / dW
∂L∂W
=∂L∂N• ∂N
∂N−1• · · · • ∂M + 1
∂M• ∂M
∂W
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
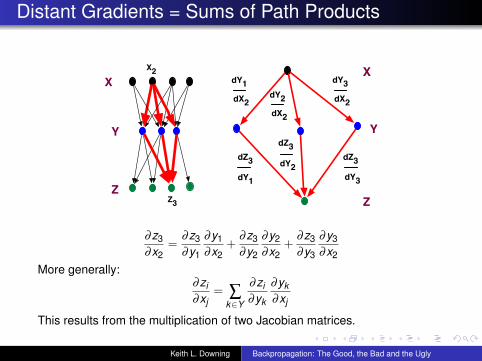
Distant Gradients = Sums of Path Products
X
Y
Z
X
Y
Z
X2
dZ3
dY1
dY2
dZ3
Z3
dY3
dX2dY2
dX2
dY1
dX2
dY3
dZ3
∂z3∂x2
=∂z3∂y1
∂y1∂x2
+∂z3∂y2
∂y2∂x2
+∂z3∂y3
∂y3∂x2
More generally:∂zi∂xj
= ∑k∈Y
∂zi∂yk
∂yk∂xj
This results from the multiplication of two Jacobian matrices.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
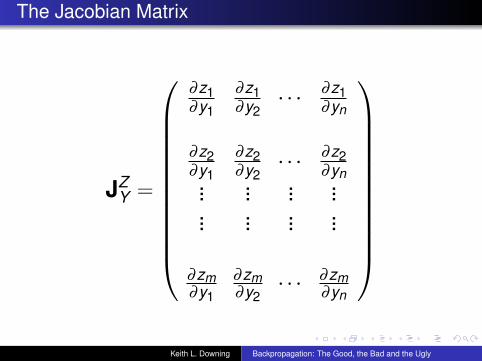
The Jacobian Matrix
JZY =
∂z1∂y1
∂z1∂y2· · · ∂z1
∂yn
∂z2∂y1
∂z2∂y2· · · ∂z2
∂yn... ... ... ...... ... ... ...
∂zm∂y1
∂zm∂y2· · · ∂zm
∂yn
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
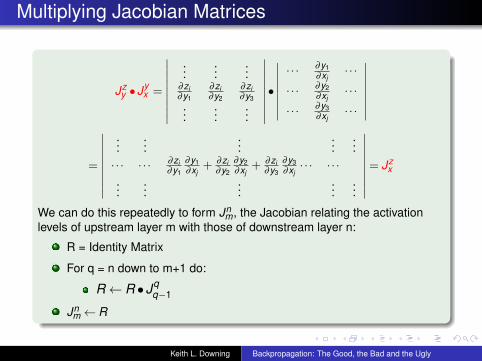
Multiplying Jacobian Matrices
Jzy •Jy
x =
∣∣∣∣∣∣∣∣∣...
......
∂zi∂y1
∂zi∂y2
∂zi∂y3
......
...
∣∣∣∣∣∣∣∣∣•∣∣∣∣∣∣∣∣· · · ∂y1
∂xj· · ·
· · · ∂y2∂xj
· · ·· · · ∂y3
∂xj· · ·
∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣...
......
......
· · · · · · ∂zi∂y1
∂y1∂xj
+ ∂zi∂y2
∂y2∂xj
+ ∂zi∂y3
∂y3∂xj· · · · · ·
......
......
...
∣∣∣∣∣∣∣∣∣= Jzx
We can do this repeatedly to form Jnm, the Jacobian relating the activation
levels of upstream layer m with those of downstream layer n:
R = Identity Matrix
For q = n down to m+1 do:
R← R •Jqq−1
Jnm← R
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
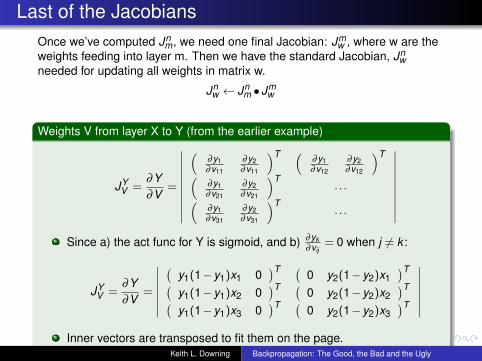
Last of the JacobiansOnce we’ve computed Jn
m, we need one final Jacobian: Jmw , where w are the
weights feeding into layer m. Then we have the standard Jacobian, Jnw
needed for updating all weights in matrix w.
Jnw ← Jn
m •Jmw
Weights V from layer X to Y (from the earlier example)
JYV =
∂Y∂V
=
∣∣∣∣∣∣∣∣∣∣
(∂y1∂v11
∂y2∂v11
)T (∂y1∂v12
∂y2∂v12
)T(∂y1∂v21
∂y2∂v21
)T· · ·(
∂y1∂v31
∂y2∂v31
)T· · ·
∣∣∣∣∣∣∣∣∣∣Since a) the act func for Y is sigmoid, and b) ∂yk
∂vij= 0 when j 6= k :
JYV =
∂Y∂V
=
∣∣∣∣∣∣∣(
y1(1−y1)x1 0)T (
0 y2(1−y2)x1)T(
y1(1−y1)x2 0)T (
0 y2(1−y2)x2)T(
y1(1−y1)x3 0)T (
0 y2(1−y2)x3)T
∣∣∣∣∣∣∣Inner vectors are transposed to fit them on the page.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
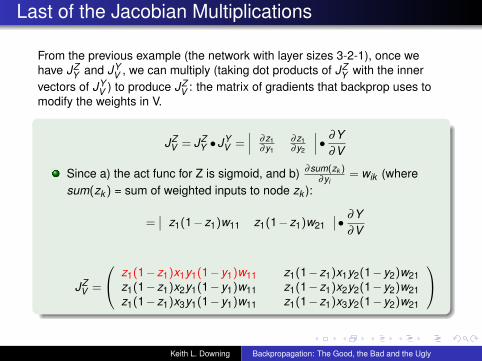
Last of the Jacobian Multiplications
From the previous example (the network with layer sizes 3-2-1), once wehave JZ
Y and JYV , we can multiply (taking dot products of JZ
Y with the innervectors of JY
V ) to produce JZV : the matrix of gradients that backprop uses to
modify the weights in V.
JZV = JZ
Y •JYV =
∣∣∣ ∂z1∂y1
∂z1∂y2
∣∣∣• ∂Y∂V
Since a) the act func for Z is sigmoid, and b) ∂sum(zk )∂yi
= wik (wheresum(zk ) = sum of weighted inputs to node zk ):
=∣∣ z1(1−z1)w11 z1(1−z1)w21
∣∣• ∂Y∂V
JZV =
z1(1−z1)x1y1(1−y1)w11 z1(1−z1)x1y2(1−y2)w21z1(1−z1)x2y1(1−y1)w11 z1(1−z1)x2y2(1−y2)w21z1(1−z1)x3y1(1−y1)w11 z1(1−z1)x3y2(1−y2)w21
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
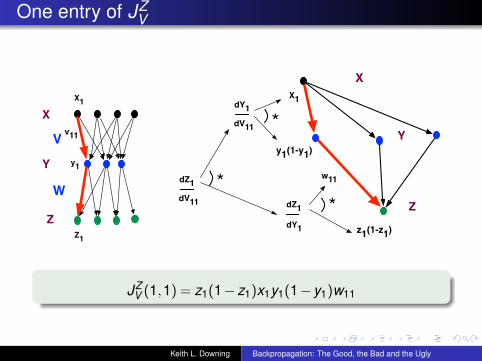
One entry of JZV
X
Y
Z
X1
Z1
V
W
v11
y1
X1
y1(1-y1)
w11
z1(1-z1)
dY1
dV11
dZ1
dY1
*
*
X
Y
Z
dZ1
dV11
*
JZV (1,1) = z1(1−z1)x1y1(1−y1)w11
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
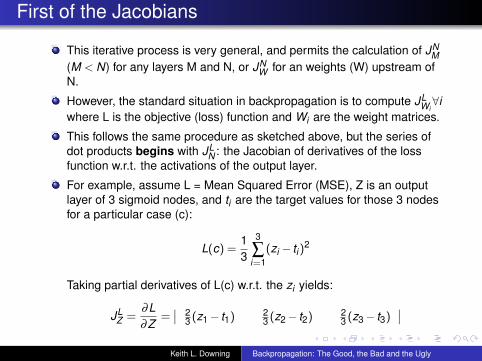
First of the Jacobians
This iterative process is very general, and permits the calculation of JNM
(M < N) for any layers M and N, or JNW for an weights (W) upstream of
N.
However, the standard situation in backpropagation is to compute JLWi∀i
where L is the objective (loss) function and Wi are the weight matrices.
This follows the same procedure as sketched above, but the series ofdot products begins with JL
N : the Jacobian of derivatives of the lossfunction w.r.t. the activations of the output layer.
For example, assume L = Mean Squared Error (MSE), Z is an outputlayer of 3 sigmoid nodes, and ti are the target values for those 3 nodesfor a particular case (c):
L(c) =13
3
∑i=1
(zi − ti )2
Taking partial derivatives of L(c) w.r.t. the zi yields:
JLZ =
∂L∂Z
=∣∣ 2
3 (z1− t1) 23 (z2− t2) 2
3 (z3− t3)∣∣
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
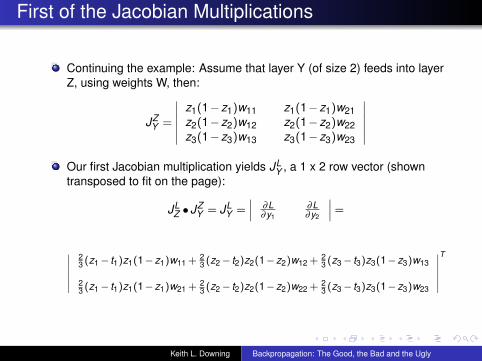
First of the Jacobian Multiplications
Continuing the example: Assume that layer Y (of size 2) feeds into layerZ, using weights W, then:
JZY =
∣∣∣∣∣∣z1(1−z1)w11 z1(1−z1)w21z2(1−z2)w12 z2(1−z2)w22z3(1−z3)w13 z3(1−z3)w23
∣∣∣∣∣∣Our first Jacobian multiplication yields JL
Y , a 1 x 2 row vector (showntransposed to fit on the page):
JLZ •JZ
Y = JLY =
∣∣∣ ∂L∂y1
∂L∂y2
∣∣∣=
∣∣∣∣∣∣23 (z1− t1)z1(1−z1)w11 +
23 (z2− t2)z2(1−z2)w12 +
23 (z3− t3)z3(1−z3)w13
23 (z1− t1)z1(1−z1)w21 +
23 (z2− t2)z2(1−z2)w22 +
23 (z3− t3)z3(1−z3)w23
∣∣∣∣∣∣T
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
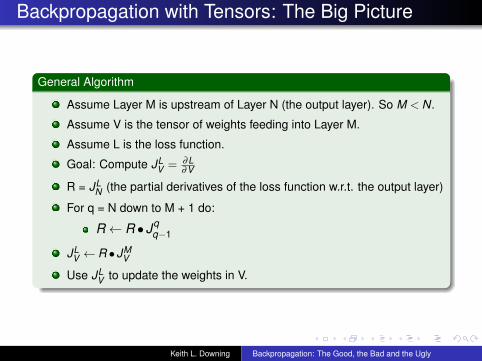
Backpropagation with Tensors: The Big Picture
General Algorithm
Assume Layer M is upstream of Layer N (the output layer). So M < N.
Assume V is the tensor of weights feeding into Layer M.
Assume L is the loss function.
Goal: Compute JLV = ∂L
∂V
R = JLN (the partial derivatives of the loss function w.r.t. the output layer)
For q = N down to M + 1 do:
R← R •Jqq−1
JLV ← R •JM
V
Use JLV to update the weights in V.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
Practical Tips
1 Only add as many hidden layers and hidden nodes as necessary. Toomany→ more weights to learn + increased chance ofover-specialization.
2 Scale all input values to the same range, typically [0 1] or [-1 1].3 Use target values of 0.1 (for zero) and 0.9 (for 1) to avoid saturation
effects of sigmoids.4 Beware of tricky encodings of input (and decodings of output) values.
Don’t combine too much info into a single node’s activation value (eventhough it’s fun to try), since this can make proper weights difficult (orimpossible) to learn.
5 For discrete (e.g. nominal) values, one (input or output) node per valueis often most effective. E.g. car model and city of residence -vs- incomeand education for assessing car-insurance risk.
6 All initial weights should be relatively small: [-0.1 0.1]7 Bias nodes can be helpful for complicated data sets.8 Check that all your layer sizes, activation functions, activation ranges,
weight ranges, learning rates, etc. make sense in terms of each otherand your goals for the ANN. One improper choice can ruin the results.
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly
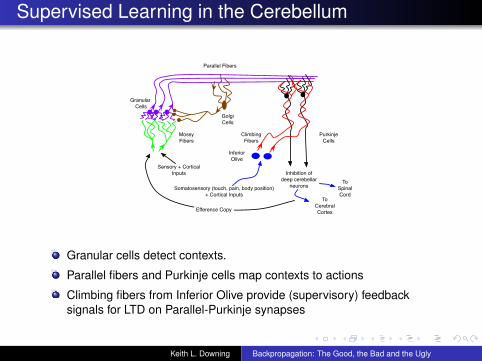
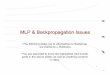
Supervised Learning in the Cerebellum
Parallel Fibers
Granular Cells
MossyFibers
ClimbingFibers
PurkinjeCells
InferiorOlive
Inhibition ofdeep cerebellar
neurons
To CerebralCortex
ToSpinalCord
Sensory + CorticalInputs
Somatosensory (touch, pain, body position) + Cortical Inputs
GolgiCells
Efference Copy
Granular cells detect contexts.
Parallel fibers and Purkinje cells map contexts to actions
Climbing fibers from Inferior Olive provide (supervisory) feedbacksignals for LTD on Parallel-Purkinje synapses
Keith L. Downing Backpropagation: The Good, the Bad and the Ugly