Embed Size (px)
Citation preview
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Autonomous Sailing Boats
Christian Alt, Natalie Wittinghofer
Department of Computer Sciences - University of Salzburg
30.5.2011
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Overview
1 Introduction
2 Hardware
3 Software Architecture
4 Communication
5 Control System
6 Collision Avoidance
7 Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Introduction
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Challenges of Autonomous Sailing Boats
Hardware challenges
Routeing algorithms
Energy self sufficience
Collision avoidance
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Conference and Competitions
International Robotic Sailing Conference (IRSC) since 2008
World Robotic Sailing Championship (WRSC) since 2008
Microtransat 2006 - Routeing Precision
Microtransat 2007 - Short Race (3km), Endurance Race (24h)
Microtransat 2010 - Transatlantic Race (Ireland - Carribean)
Microtransat 2011 - Transatlantic Race
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Applications for autonomous sail boats
Intelligend Sensor Buoys
CO2-neutral in Transportation of Goods
Reconnaissance and Surveillance
Supply Vessel
safety and comfort on sailing boats
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Hardware
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Hardware - Boats
In the World Robot Sailing Championship[1] boats are divided intothree classes:
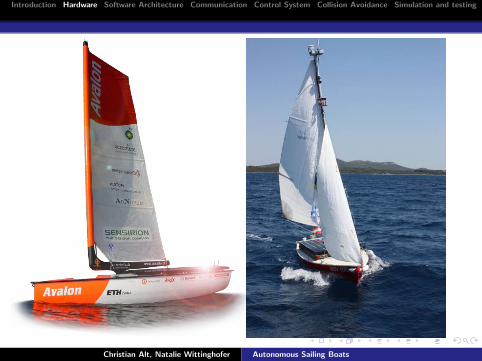
Microtransat class for boats up to 4 m long
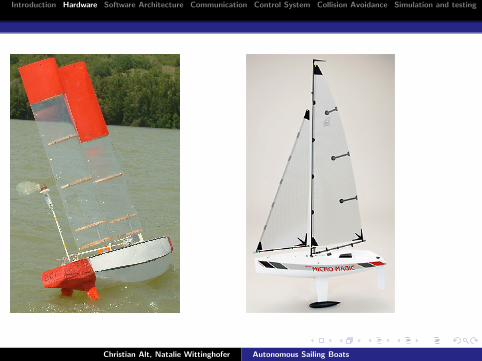
SailBot class for boats up to 2 m long
MicroMagic class (0.53 m long)
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
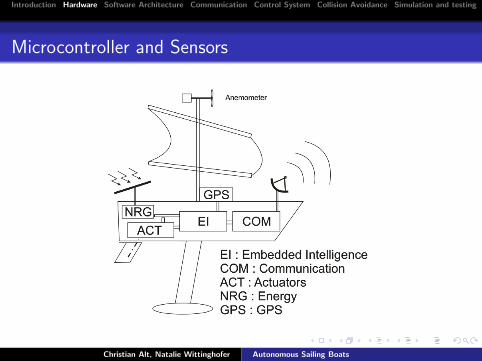
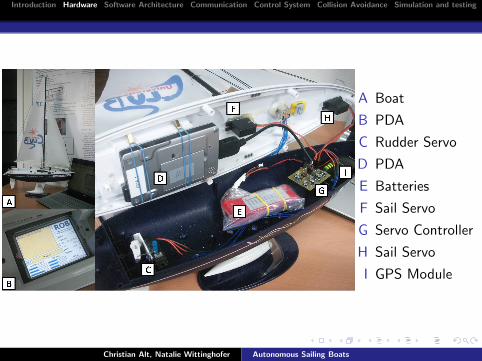
Microcontroller and Sensors
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
A Boat
B PDA
C Rudder Servo
D PDA
E Batteries
F Sail Servo
G Servo Controller
H Sail Servo
I GPS Module
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
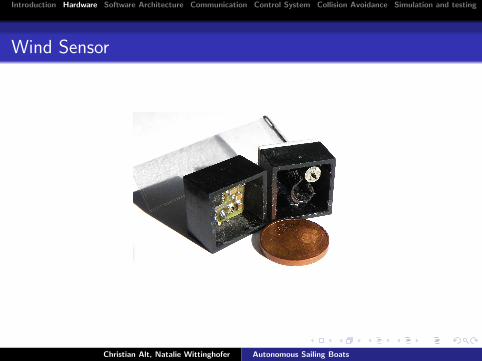
Wind Sensor
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Software Architecture
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Software Architecture
Has to perform time intensive tasks
Quickly react to changing environment (weather, staticobstacles)
Architectures split the system into different layers
Top-down planner based ModelThree-layer architecture:
Sensing systemPlanning systemExecuting system
Bottom-up reactive system
Mapping from sensorial input to actions
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
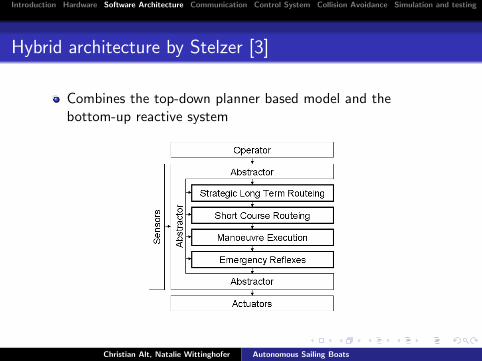
Hybrid architecture by Stelzer [3]
Combines the top-down planner based model and thebottom-up reactive system
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
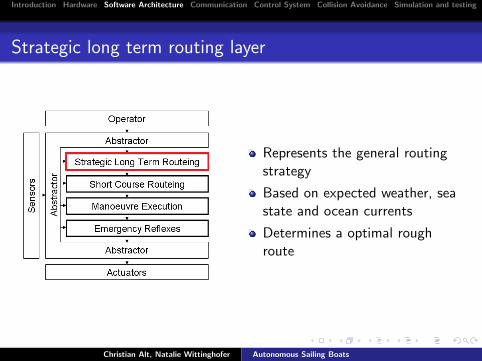
Strategic long term routing layer
Represents the general routingstrategy
Based on expected weather, seastate and ocean currents
Determines a optimal roughroute
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
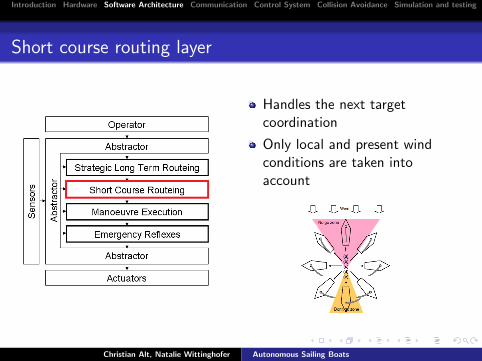
Short course routing layer
Handles the next targetcoordination
Only local and present windconditions are taken intoaccount
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
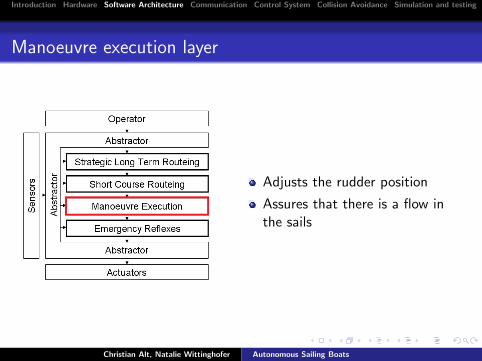
Manoeuvre execution layer
Adjusts the rudder position
Assures that there is a flow inthe sails
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
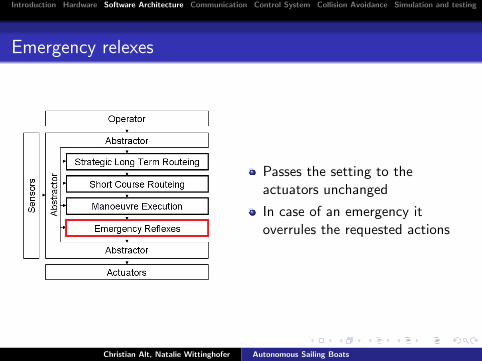
Emergency relexes
Passes the setting to theactuators unchanged
In case of an emergency itoverrules the requested actions
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Communication
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Communication
Permanent data link between boat and shore is necessary
Communications Partners
SailboatVisualisation softwareRemote controller
Three-stage communication system by Stelzer [2]
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
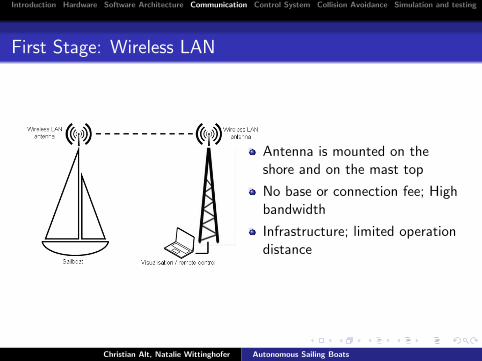
First Stage: Wireless LAN
Antenna is mounted on theshore and on the mast top
No base or connection fee; Highbandwidth
Infrastructure; limited operationdistance
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
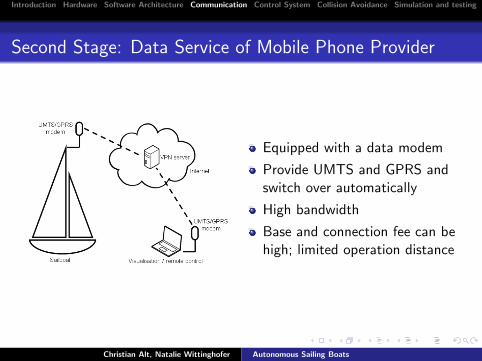
Second Stage: Data Service of Mobile Phone Provider
Equipped with a data modem
Provide UMTS and GPRS andswitch over automatically
High bandwidth
Base and connection fee can behigh; limited operation distance
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
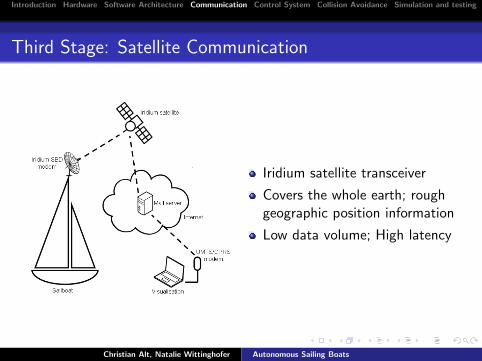
Third Stage: Satellite Communication
Iridium satellite transceiver
Covers the whole earth; roughgeographic position information
Low data volume; High latency
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
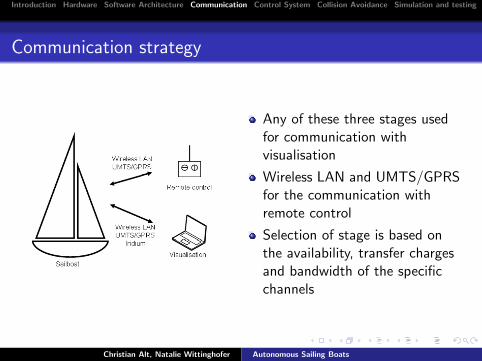
Communication strategy
Any of these three stages usedfor communication withvisualisation
Wireless LAN and UMTS/GPRSfor the communication withremote control
Selection of stage is based onthe availability, transfer chargesand bandwidth of the specificchannels
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Control System
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Control System
Control of a sailboat consists of two main tasks:
governing of the ruddertrimming of the sails
Basic sailing rules about steering the sails and rudderaccording to direction of target and wind
Transformed into a fuzzy inference system
Two independent working control circles [5]:
Rudder controllerSail controller
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Rudder Control Circuit
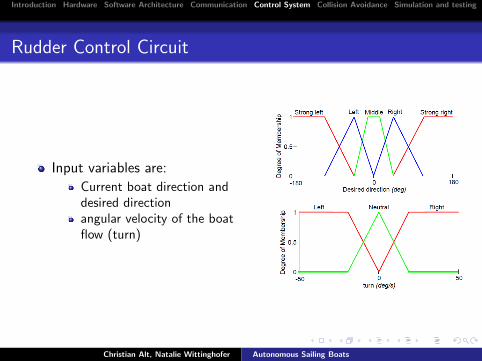
Input variables are:
Current boat direction anddesired directionangular velocity of the boatflow (turn)
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Rudder Control Circuit
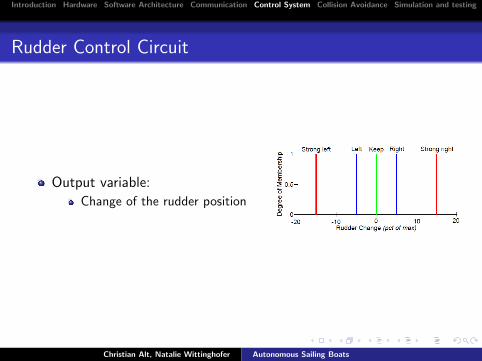
Output variable:
Change of the rudder position
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Rudder Control Circuit
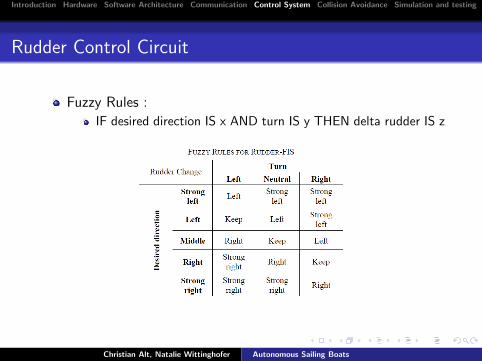
Fuzzy Rules :
IF desired direction IS x AND turn IS y THEN delta rudder IS z
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
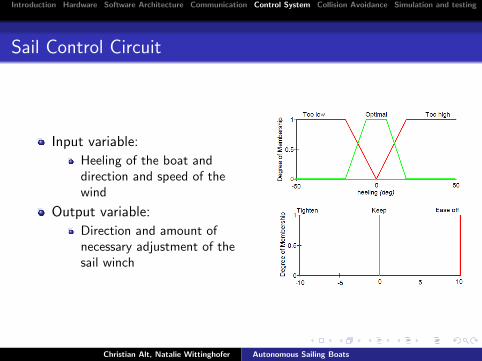
Sail Control Circuit
Input variable:
Heeling of the boat anddirection and speed of thewind
Output variable:
Direction and amount ofnecessary adjustment of thesail winch
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Rudder Control Circuit
Fuzzy Rules :
IF heeling is too low THEN tighten sheetsIF heeling is optimal THEN keep sheetsIF heeling is too high THEN ease off the sheets
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Collision Avoidance
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
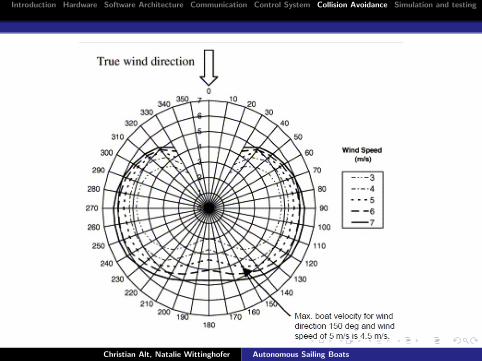
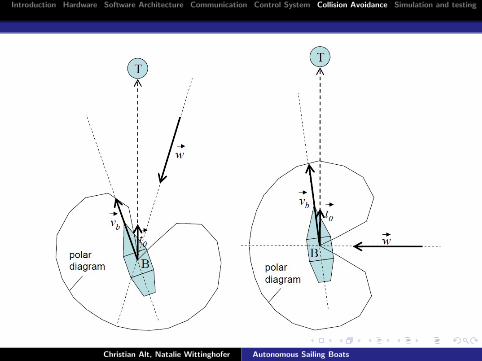
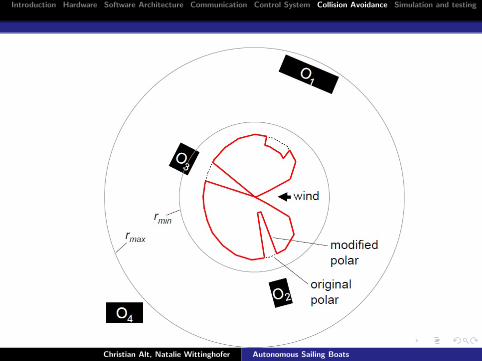
Reactive Approach to Collision Avoidance (Stelzer et al.[4])
extendsion of the short course routeing layer
modification of the polar diagram
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
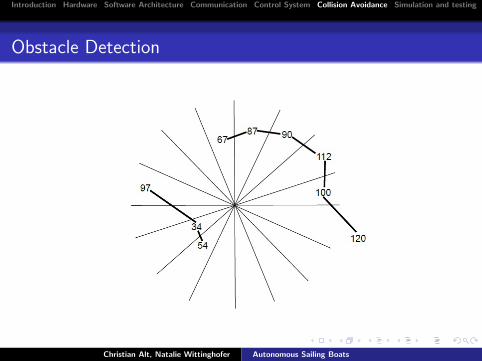
Obstacle Detection
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Simulation and testing
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Simulation
Real world testing:
expensive
time consuming
potentially dangerous
depending on the weather
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
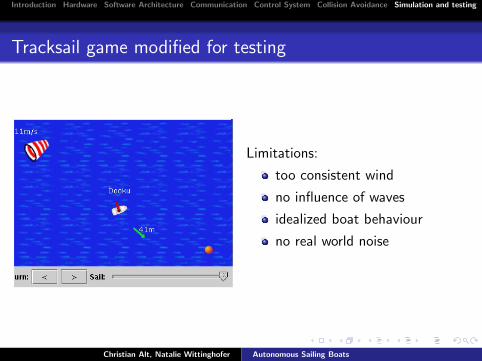
Tracksail game modified for testing
Limitations:
too consistent wind
no influence of waves
idealized boat behaviour
no real world noise
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
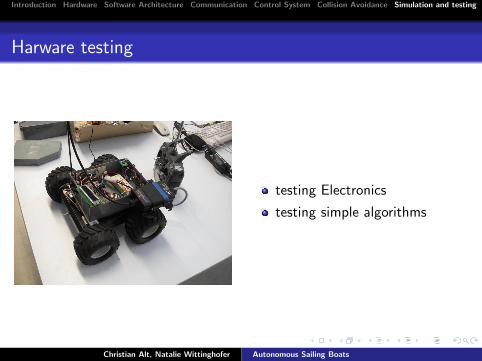
Harware testing
testing Electronics
testing simple algorithms
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats

Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
Thank you for your attention
Thank you for your attention
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
World robot sailing championship, 2011.http://www.wrsc2011.org/.
Roland Stelzer and K. Jafarmadar.Communication architecture for autonomous sailboats.In Proceedings of International Robotic Sailing Conference,pages 31–36, Matosinhos, Portugal, July.
Roland Stelzer and K. Jafarmadar.A layered system architecture to control an autonomoussailboat.In Towards Autonomous Robotic Systems (TAROS 2007),Aberystwyth, UK, September 2007.
Roland Stelzer, Karim Jafarmadar, Hannes Hassler, andRaphael Charwot.A reactive approach to obstacle avoidance in autonomoussailing.
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats
Introduction Hardware Software Architecture Communication Control System Collision Avoidance Simulation and testing
In Proceedings of 3rd International Robotic SailingConference, pages 34–40, Kingston, Ontario, Canada, July2010. Queen’s University.
Roland Stelzer, T. Proll, and Robert John.Fuzzy logic control system for autonomous sailboats.In FUZZ-IEEE2007, pages 97–102, London, UK., July.
Christian Alt, Natalie Wittinghofer Autonomous Sailing Boats





























