Embed Size (px)
Citation preview

AUTOMOTO
Motorcycle Controls and StabilizationPresented by
Gregory Berkeley & Levi Lentz
Poster Presentation

Outline
1. Motivation and Objectives
2. Prototype Design
3. Mechanical Design: Stability Wheels
4. Mathematical Model
5. Control System Diagram

Motivation & ObjectivesMotivation
◦ Study the behavior of motorcycle dynamics and achieve a method for stability for unmanned vehicles.
◦ Present a sophisticated approach of feedback control theory to further develop an understanding of an autonomous motorcycle.
Objectives◦ Develop current design to perform at desirable stability
criterion.
◦ Add low-speed stability wheels to help prevent rolling instabilities (more later).
◦ Reprogram microcontrollers for better response of control actuators.

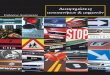
Prototype DesignStepper controlled front wheel
provides corrective torque to maintain a stable position.
Inertial sensor measures lean angles and feedback to microcontrollers.
Low center of gravity vehicle provides less resistance to corrective torques.
Actuated stabilizing wheels to help prevent roll disturbances at low speeds.

Mechanical Design: Low Speed Stabilizing Wheels

Mathematical Model
07.12905.6468.1
7.128421.0
)(
)(2
ss
s
sT
s

Equations
b
mVF
rmVF
brr
c
c
2
2 /
smallfor /'
b
VJJ
b
hmVmgL xzxx
2
b
mahVmh
b
hmVmgL 2
2
sinf
cosf
mgb
aN f
ff b
mV
b
aF
2
TcNF fff sin)(
Tb
amgc
b
amg
b
amVc
sincossin
sin2
2
b
amg
b
amVc
b
amgcT
cossin
sin
sin
2
2
cossinsin
sin2
2
bgVmac
amgcTb
b
mgacsin
b
mahVmh
b
mgac
b
hmVmgL
sinsinsin 22
TbgVac
acghVbT
bgVc
hVb
bgV
acbhmg
bgV
mahVgmh
sinsinsinsin
sinsin
sincos
sinsin
2
2
2
2
2
22

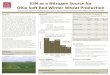
Critical VelocityVelocity where you can ride a
bike with no hands.
Root Locus at V = 5 m/s
m/s 02.2cot bgVc

Control System Diagram
Inclination SensorArduIMU V2
Step Motor DriverAA MBC05641
1700 oz-in Step MotorAA 34Y
Feedback EncoderAA 34Y
Steering MicrocontrollerArduino Uno
Speed ControllerSPD-36500B
700W DC MotorJX My1070
Feedback TachometerJX My1070
Training WheelsManufactured
Ascend/DescendTraining Wheels
Drive MicrocontrollerArduino Uno
Motorcycle Dynamics
Feedback Signal
Actuating Signal

Thank You