Embed Size (px)
Citation preview

Assimilating Sounding, Surface and Profiler Observations with a WRF-based EnKF for An MCV Case during BAMEX
Zhiyong Meng & Fuqing Zhang Texas A&M University
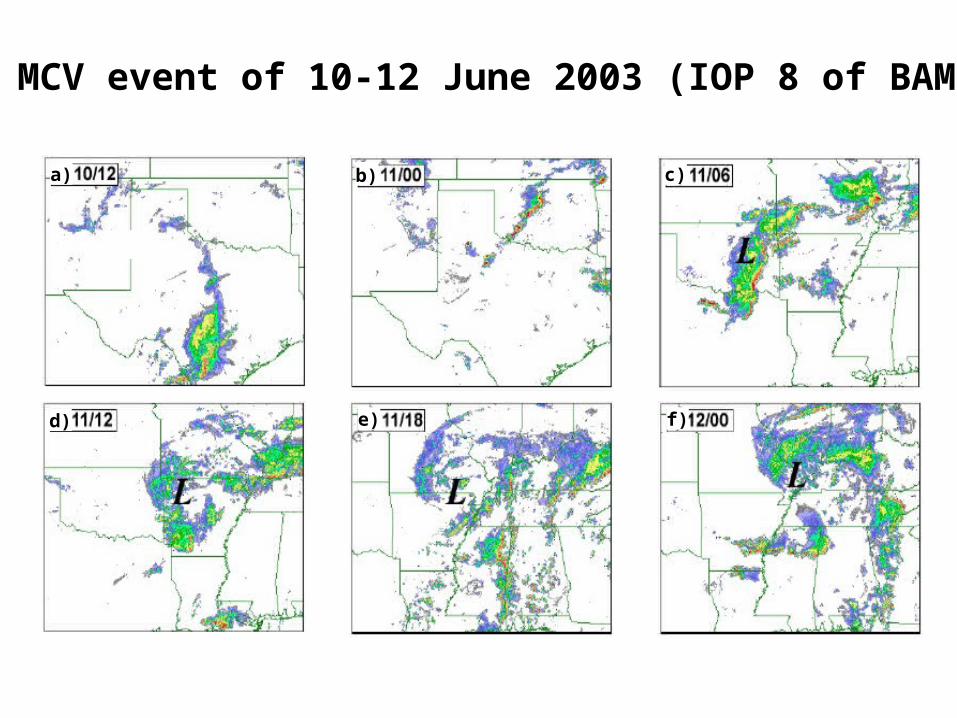
The MCV event of 10-12 June 2003 (IOP 8 of BAMEX)
a)
f)d) e)
c)b)
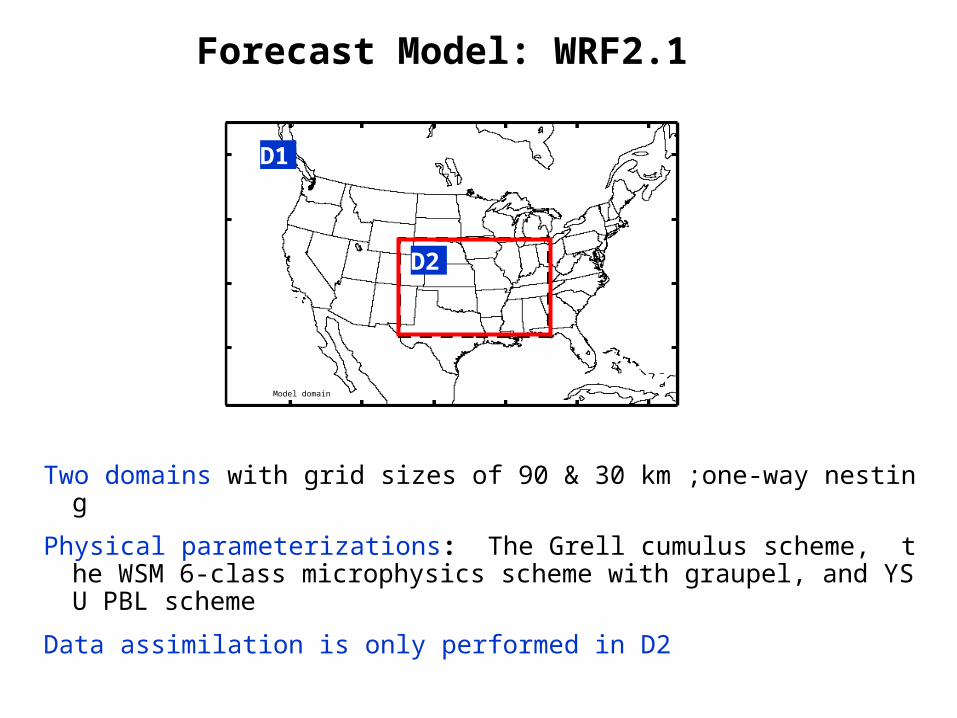
Two domains with grid sizes of 90 & 30 km ;one-way nesting
Physical parameterizations: The Grell cumulus scheme, the WSM 6-class microphysics scheme with graupel, and YSU PBL scheme
Data assimilation is only performed in D2
Model domain
Forecast Model: WRF2.1
D1
D2

Ensemble forecast in D2Simulated reflectivity (colored) and MSLP (blue lines, every 2 hPa)
12h
36h
24h
30h
L L
L: Observed MCV position at surface
11/00
12/00
11/12
11/18
X: simulated MCV position at surface
X X

Profiler (27)(thinned in vertical) 3-h interval
Sounding (31)12-h interval
Data to be assimilated
X Half Surface (458) 6-h interval

A sequential filter: Whitaker and Hamill (2002), Snyder and Zhang (2003)
Covariance localization: Gaspari and Cohn (1999), ROIs : Vertical - 15 levels for all data. Horizontal - 300 km for surface data, 900 km for radiosonde & profiler
Assimilated variables: u, v and T (same obs errors as NCEP)
Ensemble generation: perturbations sampled from WRF/3Dvar background error covariance (Barker et al. 2003)
Ensemble size: 30
A WRF-based EnKF

WRF-3DVAR
Objectives in here: to generate the initial ensemble be a benchmark for the EnKF.
Control variables: stream function, pseudo relative humidity, unbalanced part of velocity potential, temperature, and surface pressure.
Background error covariance: NMC method.
Minimization: Conjugate gradient method.
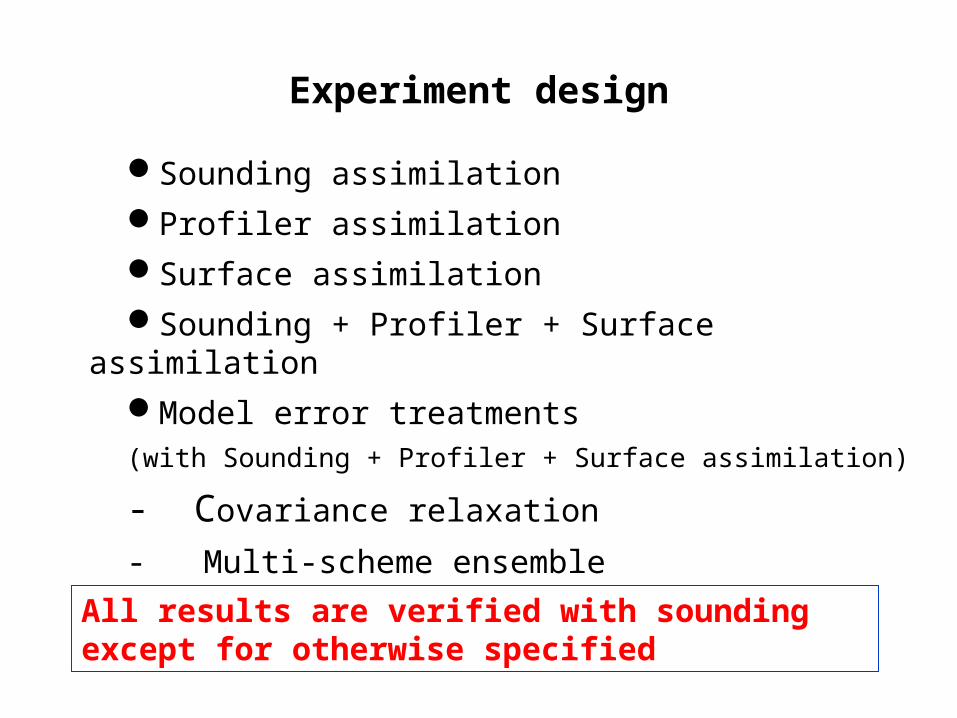
Experiment design
Sounding assimilation
Profiler assimilation
Surface assimilation
Sounding + Profiler + Surface assimilation
Model error treatments(with Sounding + Profiler + Surface assimilation)
- Covariance relaxation
- Multi-scheme ensemble
All results are verified with sounding except for otherwise specified
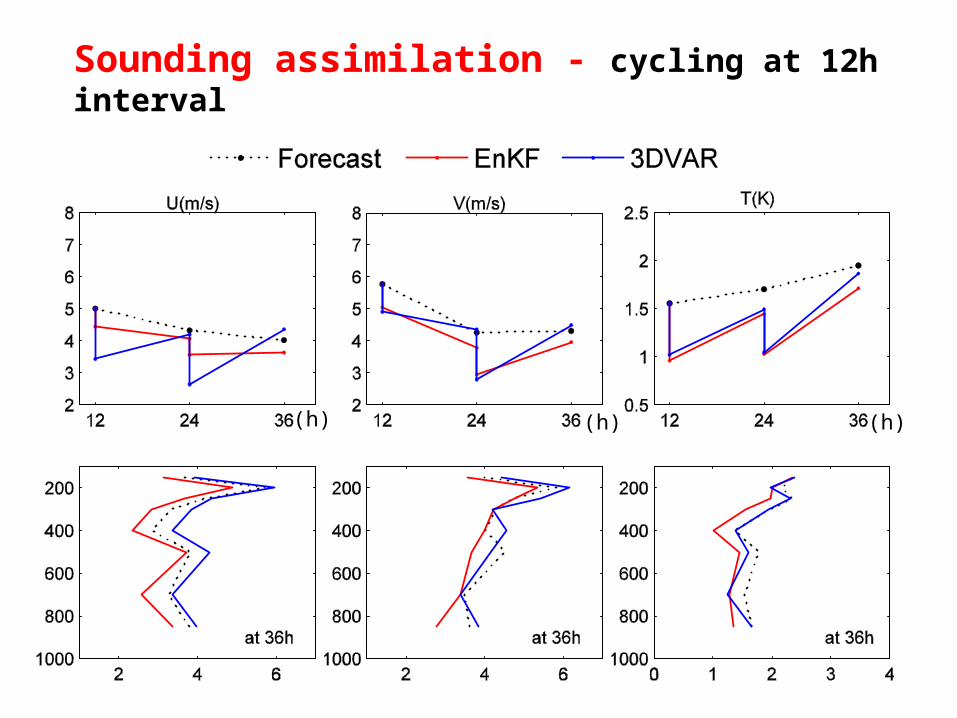
Sounding assimilation - cycling at 12h interval
(h) (h)(h)
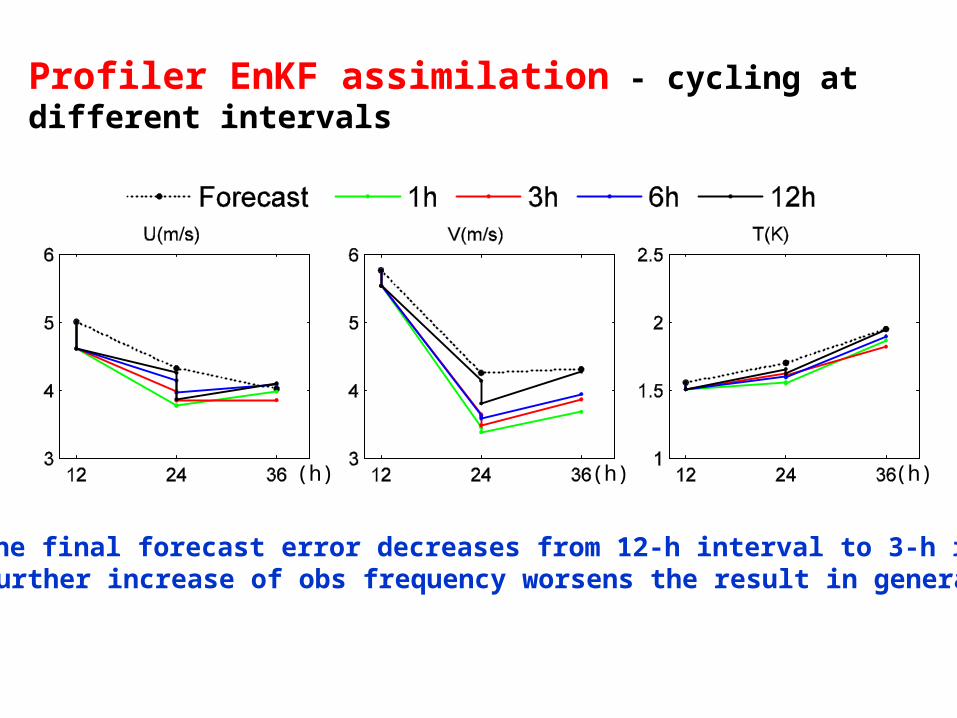
Profiler EnKF assimilation - cycling at different intervals
• The final forecast error decreases from 12-h interval to 3-h interval• Further increase of obs frequency worsens the result in general.
(h) (h)(h)
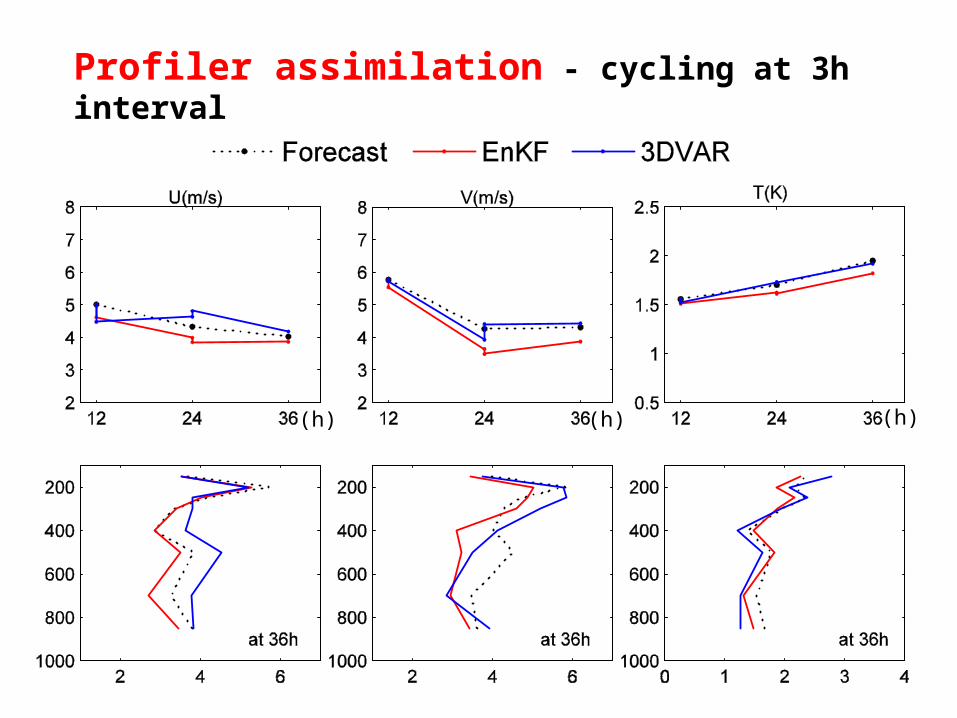
Profiler assimilation - cycling at 3h interval
(h) (h)(h)

Surface observation assimilation - Cycling at 6-h interval - Verified with the other half surface (upper) and soundings (lower)
(h) (h)(h)
(h) (h)(h)
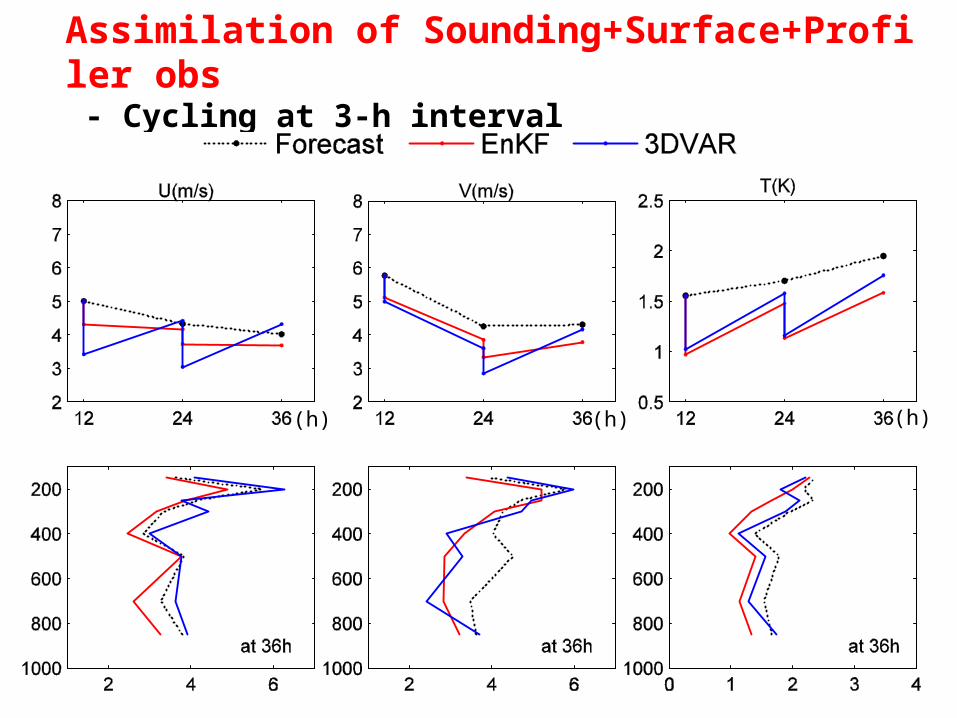
Assimilation of Sounding+Surface+Profiler obs - Cycling at 3-h interval
(h) (h)(h)
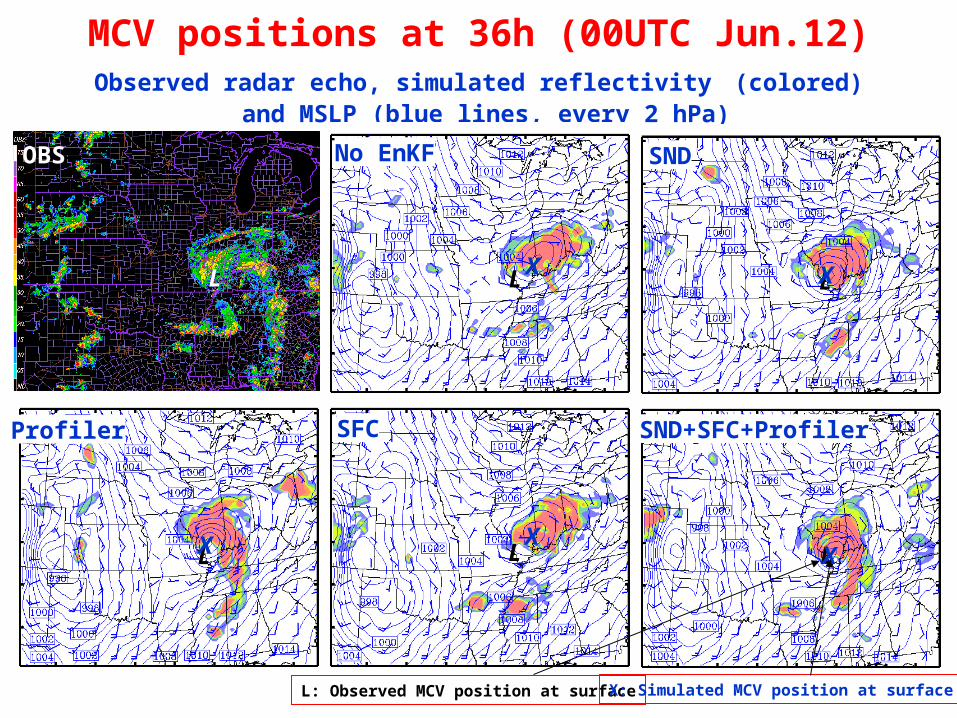
MCV positions at 36h (00UTC Jun.12)Observed radar echo, simulated reflectivity (colored)
and MSLP (blue lines, every 2 hPa)
L
L L L
L L
OBS No EnKF SND
SND+SFC+ProfilerProfiler SFC
L: Observed MCV position at surface X: Simulated MCV position at surface
X X
XXX
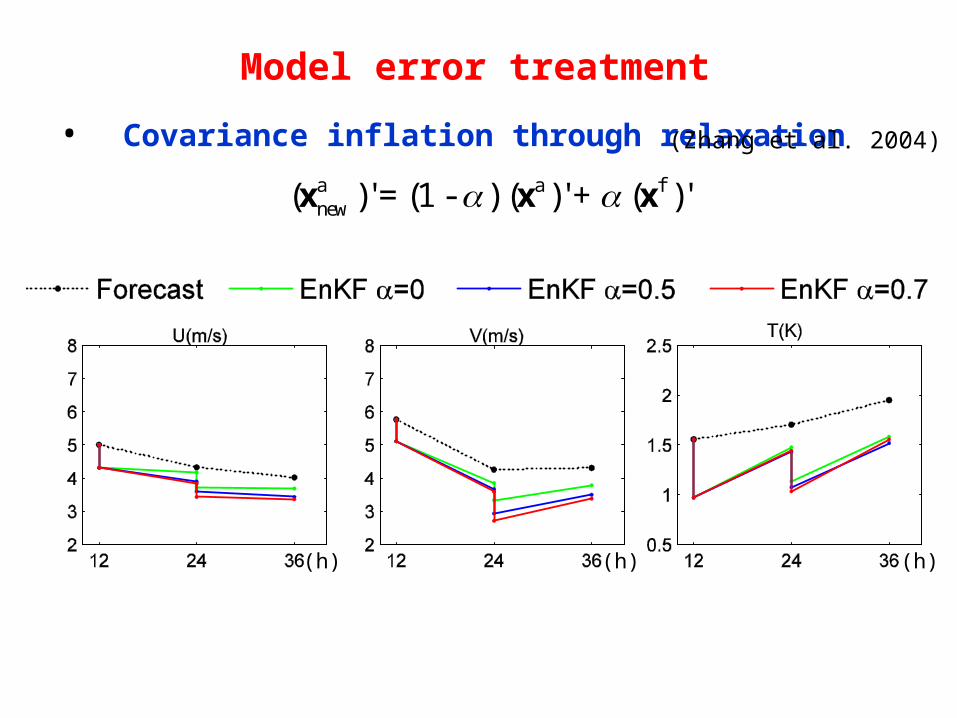
Model error treatment
• Covariance inflation through relaxation
a a fnew( )' = (1 - ) ( )' + ( )' x x x
(Zhang et al. 2004)
(h) (h)(h)
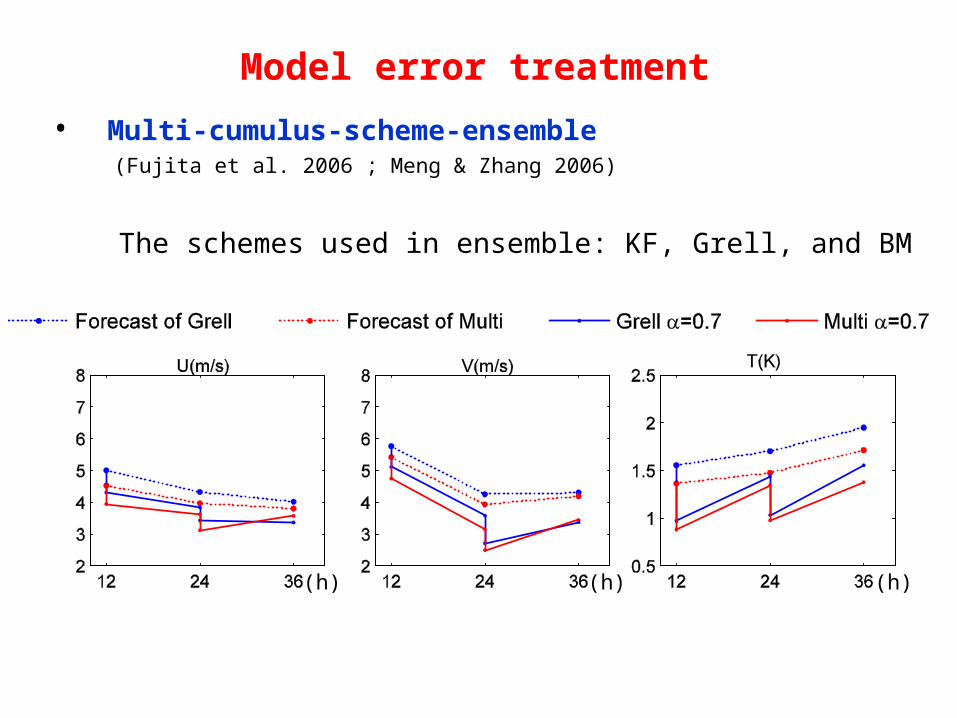
Model error treatment
• Multi-cumulus-scheme-ensemble (Fujita et al. 2006 ; Meng & Zhang 2006)
The schemes used in ensemble: KF, Grell, and BM
(h) (h)(h)

Model error treatment
• Multi-cumulus-scheme-ensemble ( Fujita et al. 2006; Meng & Zhang 2006)
(h) (h)(h)

Summary
The WRF-based EnKF behaves well when assimilating real observations. It performs better than 3DVAR for this MCV event.
Sounding and profiler assimilation can improve the analysis significantly. Impact of surface data is rather weak and short-term. The best performance is obtained by assimilating all three data sources.
Higher temporal frequency of profiler may give better performance until down to 3-h intervals.
Covariance relaxation and multi-scheme-ensemble can apparently improve the performance of the EnKF in this MCV event, consistent with Fujita et al. (2006) & Meng and Zhang (2006).
What to do next?
• Assimilate surface pressure and humidity in addition to u, v and T.
• Dropsonde data assimilation
• Higher resolution model
• Radar data assimilation





























