Embed Size (px)
Citation preview

Model Ic Ip Vdc
GEM-055-60 30 60 9~55
GEM-055-60-R 30 60 9~55
GEM-090-60 30 60 14~90
GEM-090-60-R 30 60 14~90
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 1 of 38
RoHSArgus PLUS Module EtherCAT GEM
DIGITAL SERVO DRIVE FOR BRUSH & BRUSHLESS MOTORS
CONTROL MODES• Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST)• ProfilePosition-Velocity-Torque,InterpolatedPosition,Homing• Indexer,Point-to-Point,PVT• Camming,Gearing• Position, Velocity, TorqueCOMMANDINTERFACE• CANopen application protocol over EtherCAT (CoE) • ASCIIanddiscreteI/O • Steppercommands • ±10V position/velocity/torque • PWMvelocity/torquecommandf • Masterencoder(Gearing/Camming)COMMUNICATIONS• EtherCAT• RS-232• RS-422FEEDBACKIncremental• Digital quad A/B encoder• Analog sin/cos encoder• PanasonicIncrementalA• Aux. encoder / encoder out Absolute• SSI• EnDat 2.1 & 2.2• Absolute A• TamagawaAbsoluteA• PanasonicAbsoluteAFormat• Sanyo Denki Absolute A• BiSS (B&C)Other • DigitalHalls • Resolver(-Rmodel)I/ODIGITAL• 6High-speedinputs • 1Motorover-tempinput• 4 Opto-isolated inputs• 4High-speedoutput• 4 Opto-isolated outputs• 1Opto-isolatedmotorbrakeoutputI/OANALOG• 1 Reference input, 12-bit SAFE TORQUE OFF (STO)• SIL3,Category3,PLd
DIMENSIONS:IN[MM]• 3.10x2.40x0.92[78.7x60.1x23.4]
DESCRIPTIONGEM sets new levels of performance, connectivity, andflexibility.CANopen application protocol over EtherCAT (CoE) communicationprovidesawidelyusedcost-effectiveindustrialbus.Awiderangeofabsoluteencodersaresupported.
Both isolated and high-speed non-isolated I/O areprovided.Forsafetycriticalapplications,redundantpowerstageenableinputscanbeemployed.

Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 2 of 38
RoHSArgus PLUS Module EtherCAT GEM
MODEL GEM-055-60(-R) GEM-090-60(-R)OUTPUT CURRENT
PeakCurrent 60(42.4) 60(42.4) Adc(Arms) Peaktime 1 1 Sec Continuouscurrent 30(21.2) 30(21.2) Adc(Arms) PeakOutputPower 5.4 5.4 kW ContinuousOutputPower 2.7 2.7 kW
INPUTPOWER HVmintoHVmax +9to+55 +14to+90 Vdc Ipeak 60 60 Adc Icont 30 30 Adc AuxHV +20toHVmax 2.5Wmax Optionalkeep-alivepowerinputwhen+HVisremoved
PWM OUTPUTS Type MOSFET3-phaseinverter,16kHzcenter-weightedPWMcarrier,space-vectormodulation PWMripplefrequency 32kHz
DIGITALCONTROL Digital Control Loops Current, velocity, position. 100% digital loop control Samplingrate(time) Currentloop:16kHz(62.5µs),Velocity&positionloops:4kHz(250µs) PWMfrequency 16kHz Busvoltagecompensation Changesinbusormainsvoltagedonotaffectbandwidth Minimumloadinductance 500µHline-line Resolution 12-bit capture of U & V phase currents
COMMANDINPUTS
EtherCAT: CAN application protocol over EtherCAT (CoE): Cyclic Synchronous Position/Velocity/Torque, ProfilePosition/Velocity/Torque,InterpolatedPosition(PVT),Homing Stand-alone mode: Analog torque, velocity, position reference ±10 Vdc, 12 bit resolution Dedicated differential analog input Digitalpositionreference Pulse/Direction,CW/CCW Steppercommands(4MHzmaximumrate) Quad A/B Encoder 2 M line/sec, 8 Mcount/sec (after quadrature) Digital torque & velocity reference PWM , Polarity PWM = 0% - 100%, Polarity = 1/0 PWM 50% PWM = 50% ±50%, no polarity signal required PWMfrequencyrange 1kHzminimum,100kHzmaximum PWMminimumpulsewidth 220ns Indexing Upto32sequencescanbelaunchedfrominputsorASCIIcommands. Camming Upto10CAMtablescanbestoredinflashmemory ASCII RS-232,9600~115,200Baud,3-wire,RJ-11connector
DIGITALINPUTS Number 11 [IN1,2,3,4,5,6] Digital,non-isolated,Schmitttrigger,1µsRCfilter,7Vdccompatible,10kpull-upto+5Vdc Vt+=3.5Vdcmax,Vt-=1.5Vdcmin,Vh=0.45Vdcmin,SLIportMISOsignal [IN7,8,9,10] Digital,opto-isolated,single-ended,±15~30Vdccompatible,bi-polar,withcommonreturn Ratedimpulse≥800V,Vin-LO≤6.0Vdc,Vin-HI≥10.0Vdc,Inputcurrent±3.6mA@±24Vdc,typical [IN11] Defaultsasmotorovertempinputonfeedbackconnector,24Vdcmax,programmabletootherfunctions OtherdigitalinputsarealsoprogrammablefortheMotempfunction 330µsRCfilter,4.99kpull-upto+5Vdc,Vt+=2.5~3.5Vdc,VT-=1.3~2.2Vdc,VH=0.7~1.5Vdc Functions Allinputsareprogrammable,[IN1]defaultstotheEnablefunctionandisprogrammablefor other functions.analog input
ANALOGINPUT [AIN±] Differential,±10Vdc,5kΩinputimpedance,12-bitresolution Bandwidth(-3dB)ofanalogsignalpath:≥60kHz,common-moderange-10to+20Vdc
DIGITALOUTPUTS Number 9 [OUT1~4] Isolated,two-terminalSSRwith1W series resistor and 36 V Zener diode for driving inductive loads Ton=5msmax,@300mA,Toff=2msmax@300mA Maximumworkingvoltagewithrespecttoground:32Vdc,ratedimpulsevoltage≥800Vdc [OUT5~8] Highspeed,SLIportMOSI,SCLK,&EN1signals,74AHCT125linedrivers;+5Vdctolerant Outputcurrent:±25mAmax@±5Vdc [OUT9BRAKE] Isolated,MOSFET,1Amax,externalflybackdioderequired,Turn-ON&Turn-OFFdelay250µsmax GATE output can drive an external MOSFET for brakes requiring higher current Maximumworkingvoltagewithrespecttoground:32Vdc,ratedimpulsevoltage≥800Vdc Functions Defaultfunctionsareshownabove,programmabletootherfunctions
RS-232 PORT Signals RxD,TxD,Gndin6-position,4-contactRJ-11stylemodularconnector,non-isolated Mode Full-duplex,DTEserialcommunicationportfordrivesetupandcontrol,9,600to115,200baud Protocol BinaryandASCIIformats
RS-422 PORT Signals A/Y(+),B/X(-),GndfromISL32455tranceiver,opticallyisolated Mode Half-duplex,RS-422slave,9,600to230.4kbps Protocol BinaryandASCIIformats
NOTES:1.Brakeoutput[OUT9]isprogrammableasmotorbrake,orasgeneralpurposedigitaloutput.2.WhenSTOfeatureisused,the24VpowersupplymustbeaSELVorPELVtypewiththemaximumoutputvoltagelimitedto60Vdcorlower.
GENERAL SPECIFICATIONS

DANGER
Refer to the 16-01600 Argus GEM & GPM STO Manual
Theinformationprovidedinthe16-01600 Argus GEM & GPM STO Manual mustbeconsidered for any application using the GEM drive STO feature.Failure to heed this warning can cause equipment damage, injury, or death.
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 3 of 38
RoHSArgus PLUS Module EtherCAT GEM
DC OUTPUTS Number 1 Ratings +5Vdc@500mAthermalandoverloadprotected
SAFE TORQUE OFF (STO) Function PWMoutputsareinactiveandcurrenttothemotorwillnotbepossiblewhentheSTOfunctionisasserted Standard DesignedtoIEC-61508-1,IEC-61508-2,IEC-61800-5-2,ISO-13849-1 SafetyIntegrityLevel SIL3,Category3,Performanceleveld Inputs 2two-terminal:STO-IN1+,STO-IN1-,STO-IN2+,STO-IN2- Type Opto-isolators,24Vcompatible,Vin-LO≤6.0Vdcoropen,Vin-HI≥15.0Vdc, Inputcurrent(typical) STO-IN1:11.2mA,STO-IN2:11.2mA Responsetime 2msfromVin≤6.0Vdctointerruptionofenergysuppliedtomotor Muting Wiringashortingplugwithjumpers(seepage7)willmute(bypass)theSTOfunction
PROTECTIONS HVOvervoltage-055models +HV>55Vdc Driveoutputsturnoffuntil+HV≤55Vdc HVUndervoltage-055models +HV<9Vdc Driveoutputsturnoffuntil+HV≥9Vdc HVOvervoltage-090models +HV>90Vdc Driveoutputsturnoffuntil+HV≤90Vdc HVUndervoltage-090models +HV<14Vdc Driveoutputsturnoffuntil+HV≥14Vdc Driveovertemperature Heatplate>70°C. Driveoutputsturnoff Short circuits Output to output, output to ground, internal PWM bridge faults I2TCurrentlimiting Programmable:continuouscurrent,peakcurrent,peaktime Motorovertemperature Digitalinputsprogrammabletodetectmotortemperatureswitch FeedbackLoss Inadequateanalogencoderamplitudeormissingincrementalencodersignals
MECHANICAL&ENVIRONMENTAL Sizemm[in] 3.10x2.40x0.92[78.7x60.1x23.4] Weight 4.2oz(120g)withoutheatsink Ambienttemperature 0to+45°Coperating,-40to+85°Cstorage Humidity 0to95%,non-condensing Vibration 2 gpeak,10~500Hz(sine),IEC60068-2-6 Shock 10 g,10ms,half-sinepulse,IEC60068-2-27 Contaminants Pollutiondegree2 Environment IEC68-2 Cooling Heatsinkand/orforcedaircoolingrequiredforcontinuouspoweroutput Altitude ≤2000m(6560ft)perIEC60068-2-13
AGENCY STANDARDS CONFORMANCE Standards and Directives Functional Safety (PENDING) IEC61508-1,IEC61508-2, EN(ISO)13849-1,EN(ISO)13849-2,IEC61800-5-2
Electrical Safety Directive2014/35/EU(LowVoltage) UL61800-5-1,IEC61800-5-1
EMC Directive 2014/30/EU IEC61800-3 EMCandFunctionalSafetyofPDS(IFApublication)
Restriction of the Use of Certain Hazardous Substances (RoHS) Directive2011/65/EU(RoHSII)
Approvals UL and cUL recognized component to: UL 61800-5-1 UL Functional Safety Certification to: (PENDING) IEC61508-1,ISO13849-1/:2015,IEC61508-5-2
GENERAL SPECIFICATIONS

Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 4 of 38
RoHSArgus PLUS Module EtherCAT GEM
GENERAL SPECIFICATIONS
FEEDBACK Incremental encoders: DigitalIncrementalEncoder Quadraturesignals,(A,/A,B,/B,X,/X),differential(X,/XIndexsignalsnotrequired) MAX3097differentiallinereceiversforA,BandX,5MHzmaximumlinefrequency(20Mcounts/sec) Faultdetectionforopen/shortedinputs,orlowsignalamplitude,selectableforA||B||XorA||B Externalterminatorsrequiredforfaultdetection,121W for A & B channels, 130WforX AnalogIncrementalEncoder Sin/Cos,differential,internal121Wterminatorsbetween±inputs,1.0Vp-ptypical,1.45Vp-pmaximum, Common-modevoltage0.25to3.75Vdc,,±0.25V,centeredabout2.5Vdc Signals:Sin(+),Sin(-),Cos(+),Cos(-), Frequency:230kHzmaximumline(cycle)frequency,interpolation12bits/cycle(4096counts/cycle) Absolute encoders: HeidenhainEnDat2.2,SSI SerialClock(X,/X),Data(S,/S)signals,differential4-wire, External 121WterminatorrequiredforClock,221W for Data HeidenhainEnDat2.1 Clock(X,/X),Data(S,/S),Sin/Cos(Sin+,Sin-,Cos+,Cos-)signals Internal121WterminatorsbetweenSin/Cosinputs, External 121WterminatorrequiredforClock,221W for Data AbsoluteA,TamagawaAbsoluteA,PanasonicAbsoluteAFormat SD+,SD-(S,/S)signals,2.5or4MHz,2-wirehalf-duplex,external221Wterminatorrequired Position feedback: 13-bit resolution per rev, 16 bit revolution counter (29 bit absolute position data) Status data for encoder operating conditions and errors BiSS(B&C) MA+,MA-(X,/X),SL+,SL-(S,/S)signals,4-wire,clockoutputfromdrive, datareturnedfromencoder External 121WterminatorrequiredforMA,221W for SL Resolver: Type Brushless,single-speed,1:1to2:1programmabletransformationratio Resolution 14 bits (equivalent to a 4096 line quadrature encoder) Referencefrequency 8.0kHz Referencevoltage 2.8Vrms,auto-adjustablebythedrivetomaximizefeedback Referencemaximumcurrent 100mA MaximumRPM 10,000+
HALLS Digital: U,V,W:Single-ended,120°electricalphasedifferencebetweenU-V-Wsignals, Schmitttrigger,1.5µsRCfilter,24Vdccompatible,15kΩpull-upto+5Vdc Vt+=2.5~3.5Vdc,VT-=1.3~2.2Vdc,VH=0.7~1.5Vdc
Analog: U & V: Sin/Cosformat(Sin+,Sin-,Cos+,Cos-),differential,1Vpeak-peak±20%,ServoTubemotorcompatible, BW>300kHz,121ΩterminatingresistorsbetweenSin+&Sin-,Cos+&Cos-inputs 12-bitresolution,BW>300kHz,withzero-crossingdetection
MULTI-MODEENCODERPORT As Input: SeeDigitalIncrementalEncoderaboveforelectricaldataonA,B,&Xchannels,or AbsoluteencodersusingXorSchannels.Externalterminatorsrequiredasshownabove As Emulated Output: QuadratureA/Bencoderemulationwithprogrammableresolutionto4096lines(65,536counts) perrevfromanalogSin/Cosencodersorresolvers. A,/A,B,/B,outputsfromMAX3032differentiallinedriver,X,/X,S,/SfromMAX3362linedrivers As Buffered Output: DigitalA/B/Xencodersignalsfromprimarydigitalencoderarebufferedasshownabove,5MHzmax
5V OUTPUTNumber 1 Ratings +5Vdc@500mAthermalandoverloadprotected

18
18
TX2+
TX2-
RX2-
Network ground
DriveSignalGround
P3/8
P3/16
P3/11
P3/9
P3/2,5,10,13
Drive EtherCAT port
Network port
IN
OUT
TX1+
TX1 Term
RX1+
RX1 Term
TX2 Term
RX2 Term
TX1-
RX1-
P3/6
P3/3
P3/1
P3/4
P3/7
P3/12
P3/15
1M
75
75
10n
1M
75
75
RX2+
P3/14
10n
1M
CABLE SHIELD
Zo = 100 Ω
Zo = 100 Ω
Zo = 100 Ω
Zo = 100 Ω
75
75
10n75
75
10n
Signal Ground
J4/3,4,15, 16,23,50
J4/43
J4/44
RDRxD
TDTxD
6
9 1
5
TxD
RxD
Gnd
D-Sub 9M(DTE)
ISL32455
RS422(+)
RS422GND
RS422(-)TxD
RxDJ4/42
DevKitP9 Drive
J4J4/49
J4/411
2
3
4
5
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 5 of 38
RoHSArgus PLUS Module EtherCAT GEM
EtherCATistheopen,real-timeEthernetnetworkdevelopedbyBeckhoffbasedonthewidelyused100BASE-TXcablingsystem.EtherCATenableshigh-speedcontrolofmultipleaxeswhilemaintainingtightsynchronizationofclocksinthenodes.DataprotocolisCANapplicationprotocoloverEtherCAT(CoE)basedonDSP-402formotioncontroldevices.MoreinformationonEtherCATcanbefound on the EtherCAT Technology Groupweb-site:https://www.ethercat.org/default.htm
ETHERCAT COMMUNICATIONS
ETHERCATCONNECTIONSPage22showsguidelinesforPCboardlayoutanddesigning for EtherCAT signals.Page25showsthedualEtherCATcableconnectionsontheDevelopmentKit.Magneticsareintheservodrive.ExternalRJ-45connectorsdonotrequireintegratedmagnetics.
CME2->BasicSetup->OperatingModeOptions
CME2->Tools->CommunicationsWizard
RS-232COMMUNICATIONSGEMisconfiguredviaathree-wire,full-duplexDTERS-232portthatoperatesfrom9600to115,200Baud,8bits,noparity,andonestopbit.Signalformatisfull-duplex,3-wire,DTEusingRxD,TxD,andGnd.ConnectionstotheGEM RS-232portarethroughP4ThegraphicbelowshowstheconnectionsbetweenanGEMandacomputerCOMportwhichisaDTEdevice.
RS-422COMMUNICATIONSRS-422isatwo-wiredifferentialhalf-duplexportthatoperatesfrom9600to230.4kbps.ConnectionstotheGEM RS-232 port are through P4 The graphicbelowshowstheconnectionsbetweenaGEMandacomputerRS-422port.
the Copley Controls

DANGER
Refer to the 16-01600 Argus GEM & GPM STO Manual
Theinformationprovidedinthe16-01600 Argus GEM & GPM STO Manual mustbeconsidered for any application using the GEM drive STO feature.Failure to heed this warning can cause equipment damage, injury, or death.
SIGNAL PIN PIN SIGNAL
STO-IN2(-) 1 2 STO-GND
STO-IN2(+) 3 4 STO-BYPASS
STO-IN1(-) 5 6 STO-IN1(-)
STO-IN1(+) 7 8 STO-IN1(+)
STO MutingConnections
Channel 1
STO-Bypass (6.5 mA)
STO-Gnd (Sgnd)
J3
STO-IN2+
STO-IN1+
Channel 2
FPGA
PWM HI
PWM LO
Channel 3
STO-IN1-
STO-IN2-
STO-IN1+
STO-IN1-
3
1
7
5
8
6
4
2
EN
HI
LO
GateDrivers
PWMOutputs
+HV
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 6 of 38
RoHSArgus PLUS Module EtherCAT GEM
J3SIGNALS
SAFE TORQUE OFF (STO)DESCRIPTIONTheGEMprovidestheSafeTorqueOff(STO)functionasdefinedinIEC61800-5-2.Threeopto-couplersareprovidedwhich,whende-energized,preventtheupperandlowerdevicesinthePWMoutputsfrombeingoperatedbythedigitalcontrolcore.ThisprovidesapositiveOFFcapabilitythatcannotbeoverriddenbythecontrolfirmware,orassociatedhardwarecomponents.Whentheopto-couplersareactivated(currentisflowingintheinputdiodes),thecontrolcorewillbeabletocontroltheon/offstateofthePWMoutputs.
Current must flow through all of the
opto-couplers before the drive can be
enabled
STOBYPASS(MUTING)InorderforthePWMoutputsofthedrivetobeactivated,currentmustbeflowingthroughalloftheopto-couplersthatareconnectedtothe STO-1andSTO-2terminalsofJ4,andthedrivemustbeinanENABLEDstate.Whentheopto-couplersareOFF,thedriveisinaSafeTorqueOff(STO)stateandthePWMoutputscannotbeactivatedbythecontrolcoretodriveamotor.Thisdiagramshowsconnectionsthatwillenergizealloftheopto-couplersfromaninternalcurrent-source.WhenthisisdonetheSTOfeatureisoverriddenandcontroloftheoutputPWMstageisundercontrol of the digital control core. If not using the STO feature, these connections must be made in order for the drive to be enabled.
STOBYPASSCONNECTIONS
INSTALLATION

CONNECTIONS
Input J4Pins
IN4 19
IN5 22
Sgnd 3,4,15,16,23,50
[IN4] Position CU
Position CD[IN5]
SgndCD (Count-Down)
CU (Count-Up)
Controller J4
[IN4] Encoder A
Encoder B[IN5]
Sgnd
Master Encoder J4
Encoder ph. B
Encoder ph. A
J4Controller
[IN4] Position
Direction[IN5]
SgndDirection
Pulse
J4
[IN4] Current orVelocity
Polarity[IN5]
Sgnd
Duty = 0~100
Controller
[IN4] Current orVelocity
No Function[IN5]
Sgnd
<no connection>
Duty = 50% ±50%
Controller J4
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 7 of 38
RoHSArgus PLUS Module EtherCAT GEM
DIGITAL COMMAND INPUTS: POSITION
DIGITAL COMMAND INPUTS: VELOCITY, TORQUE
CME2->BasicSetup->OperatingModeOptions CME2->BasicSetup->OperatingModeOptions
CU/CD QUAD A/B ENCODERPULSE&DIRECTION
PWM&DIRECTION 50% PWM
CME2->BasicSetup->OperatingModeOptions CME2->MainPage->PWMCommand

SIGNALS&PINS
Signal J4Pins
Pulse, CW, Encoder A, Vel-Curr-Mag, Vel-Curr-50% 8
/Pulse, /CW, Encoder /A, /Vel-Curr-Mag, /Vel-Curr-50% 7
Direction, CCW, Encoder B, Vel-Curr-Pol 10
/Direction, /CCW, Encoder /B, /Vel-Curr-Pol 9
QuadEncX,AbsoluteClock 14
QuadEnc/X,/AbsoluteClock 13
Enc S, Absolute (Clock) Data 12
Enc /S, / Absolute (Clock) Data 11
Signal Ground 3,4,15,16, 23,50
Input/OutputSelect
MAX3097
MAX3032 for A/BMAX3362 for X
A/B/X signals fromdigital encoder
Input/OutputSelectPulse/Dir or CU/CD
differential commands
MAX3097
MAX3032 for A/BMAX3362 for X
InputSelect
OutputSelect
X
S
4-Wire digital absolute encoder signals
MAX3362
MAX3362
Input/OutputSelectVel/Pol, Curr/Pol or 50%
differential commands
MAX3097
MAX3032 for A/BMAX3362 for X
Input/OutputSelect
S
S
2-Wire digital absolute encoder signals
MAX3362
MAX3362
+5V output @ 500 mA
Signal Ground
Enc. B
Enc. X
Enc. X
Enc. X
Enc. S
Enc. S
Enc. A
Incremental Encoder
Absolute Encoder
J4
Frame Ground
Multi Enc A
Multi Enc /A
Multi Enc B
Multi Enc /B
Multi Enc X
Multi Enc /X
Multi Enc S
Multi Enc S
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 8 of 38
RoHSArgus PLUS Module EtherCAT GEM
MULTI-MODE ENCODER PORT AS AN INPUT
POSITIONCOMMANDINPUTS:DIFFERENTIAL• Pulse & Direction• CW&CCW(Clockwise&Counter-Clockwise)• Encoder Quad A & B• CammingEncoderA&Binput
CURRENT orVELOCITYCOMMANDINPUTS:DIFFERENTIAL• Current/Velocity Magnitude & Direction• Current/Velocity 50%
SECONDARYFEEDBACK:INCREMENTAL• QuadA/B/Xincrementalencoder
SECONDARY FEEDBACK: ABSOLUTE• Schannel:AbsoluteAencoders(2-wire) TheSchannelfirstsendsaClocksignalandthen receivesDatafromtheencoderinhalf-duplexmode.
• S&Xchannels:SSI,BiSS,EnDatencoders(4-wire) TheXchannelsendstheClocksignaltotheencoder, whichinitiatesdatatransmissionfromtheencoder ontheS-channelinfull-duplexmode

SIGNALS&PINS
Signal J4Pins
Encoder A 8
Encoder /A 7
Encoder B 10
Encoder /B 9
EncoderX 14
Encoder/X 13
Signal Ground 3,4,15,16,23,50
SecondaryEncoder Input
Input/OutputSelect
MAX3032
MAX3097
Emulated Quad A/Bsignals from analog Sin/Cos encoder
Emulated A/B signals
SecondaryEncoder Input
Input/OutputSelect
MAX3097
Buffered Quad A/Bsignals from MAX3032 Buffered Quad Xsignal from MAX3362
Buffered A/B/X signals
Enc. B
Enc. X
Enc. A
Incremental Encoder
J4
Frame Ground
Multi Enc A
Multi Enc /A
Multi Enc B
Multi Enc /B
Multi Enc X
Multi Enc /X
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 9 of 38
RoHSArgus PLUS Module EtherCAT GEM
MULTI-MODE PORT AS AN OUTPUT
OUTPUT TYPES
BUFFEREDQUADA/B/XOUTPUTS EMULATED QUAD A/B OUTPUTS
BUFFEREDFEEDBACKOUTPUTS:DIFFERENTIAL• EncoderQuadA,B,Xchannels• DirecthardwareconnectionbetweenquadA/B/X encoderfeedbackanddifferentiallinedriversforA/B/Xoutputs
EMULATEDFEEDBACKOUTPUTS:DIFFERENTIALFirmwareproducesemulatedquadA/Bsignalsfromfeedback datafromthefollowingdevices:• Absolute encoders • AnalogSin/Cosincrementalencoders

Name Notes
Analog: Reference Filter Disabled
Vloop:InputFilter Disabled
Vloop: Output Filter 1 LowPass,Butterworth, 2-pole,200Hz
Vloop: Output Filter 2 Disabled
Vloop: Output Filter 3 Disabled
Iloop:InputFilter1 Disabled
Iloop:InputFilter2 Disabled
InputShaping Disabled
Option Notes
Method SetCurrentPositionasHome
Name Notes
OUT1 Isolated Fault Active Off
OUT2Isolated NotConfiguredOUT3
OUT4
OUT5 HSNotConfigured
OUT 6 HSSPI_MOSI
OUT 7 HSSPI_CLK
OUT 8 HSSPI_EN1
OUT 9 BrakeActive-HI
Active Notes
√ Short Circuit
√ AmpOverTemperature
√ MotorOverTemp
Over Voltage
Under Voltage
√ Feedback Error
Motor Phasing Error
√ FollowingError
CommandInputFault
Motor Wiring Disconnected
STO Active
OPTIONALFAULTS
Over Current (Latched)
Name Configuration PU/PD
IN1 Enable-LO, Clear Faults +5VPU
IN2
NotConfigured +5V/Gnd
IN3
IN4
IN5
IN6
IN7
Opto NotConfigured
IN8
IN9
IN10
IN11 Motemp +5VPU
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 10 of 38
RoHSArgus PLUS Module EtherCAT GEM
CME2 DEFAULTS
ThesetablesshowtheCME2defaultsettings.Theyareuser-programmableand thesettingscanbesavedtonon-volatileflashmemory.

SPECIFICATIONS
Input Data Notes
InputVoltages
HI VT+≥2.5~3.5Vdc
LO VT-≤1.3~2.2Vdc
Hys VH0.7~1.5Vdc
Max +30Vdc
Min 0 Vdc
Pull-up/down R1 10 kW
Lowpassfilter
R2 1 kW
C1 100 pF
RC1 0.1µs
CONNECTIONS
Input J4Pins
IN1 18
IN2 17
IN3 20
IN4 19
IN5 22
IN6 21
Sgnd 3,4,15,16, 23,50
SPECIFICATIONS
Input Data Notes
InputVoltages
HI VT+≥2.5~3.5Vdc
LO VT-≤1.3~2.2Vdc
Hys VH0.7~1.5Vdc
Max +30Vdc
Min 0 Vdc
Pull-up R1 4.99 kW
Lowpassfilter
R2 10 kW
C1 33 nF
RC1 330µsBS 4999:Part 111:1987
Property ohms
Resistanceinthetemperaturerange20°Cto+70°C 60~750
Resistanceat85°C ≤1650
Resistanceat95°C ≥3990
Resistanceat105°C ≥12000
CONNECTIONS
Input J2Pins
IN11 17
Sgnd 8,18,21,22
C1
R2R1
74AHC14BQ
[IN1~6]
+5V
J4
+5V
[IN11]
Thermistor,Posistor,
or switch Signal Gnd
R1
R2
C1
J2
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 11 of 38
RoHSArgus PLUS Module EtherCAT GEM
HIGH SPEED INPUTS: IN1, IN2, IN3, IN4, IN5, IN6
• Digital, non-isolated, high-speed• Progammablepull-up/pull-down• 24VCompatible• Programmablefunctions
Notes:1)TheR2*C2timeconstantap-plieswheninputisdrivenbyactiveHI/LOdevices
• Digital, non-isolated• Motorovertempinput• 24VCompatible• Programmablefunctions
MOTOROVERTEMPINPUTThe4.99kpull-upresistorworkswithPTC(positivetemperaturecoefficient)thermistorsthatconformtoBS4999:Part111:1987,orswitchesthatopen/closeindicatingamotorover-temperaturecondition.Theactivelevelisprogrammable.
* RC time constant applieswhen input is driven byactivehigh/lowdevice
MOTOR OVERTEMP INPUT: IN11

CONNECTIONS
Signal J4Pins
IN7 27
IN8 25
IN9 26
IN10 24
ICOM 28
SPECIFICATIONS
Input Data Notes
InputVoltages
HI Vin≥±10.0Vdc*
LO Vin≤±6.0Vdc*
Max ±30 Vdc *
InputCurrent±24V ±3.6mAdc
0V 0mAdc
4.99k 4.7V
[IN7] 4.7k
4.7k
4.7k
4.7k
[ICOM]
4.99k 4.7V
[IN8]
4.99k 4.7V
[IN9]
4.99k 4.7V
[IN10]
+24V
24V GND
+
24V
J4
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 12 of 38
RoHSArgus PLUS Module EtherCAT GEM
OPTO-ISOLATED INPUTS: IN7, IN8, IN9, IN10
• Digital, opto-isolated• Agroupoffour,withacommonterminal• Workswithcurrentsourcingorsinkingdrivers• 24VCompatible• Programmablefunctions
*VdcReferencedtoICOMterminals.

SPECIFICATIONS
Spec Data Notes
InputVoltage Vref ±10 Vdc
InputResistance Rin 5 kW
CONNECTIONS
Signal J4Pins
AIN(+) 2
AIN(-) 1
Sgnd 3,4,15,16,23,50
HI/LODEFINITIONS:OUTPUTS
Input State Condition
OUT1~4HI OutputSSRisON,currentflows
LO OutputSSRisOFF,nocurrentflows
CONNECTIONS:J4PINS
Signal (+) (-)
OUT1 30 29
OUT2 32 31
OUT3 34 33
OUT4 36 35
SPECIFICATIONS
Output Data Notes
ON Voltage OUT(+)-OUT(-) Vdc 0.5V@300mAdc
Output Current Iout 300mAdcmax
+
1.5V
Shield (Frame Gnd)
Ref(+)
Ref(-)Vref
J4D/A
F.G.
±10V
Sgnd
-
[OUTn-]
300mAmax
* at 24 Vdc
Vdc
J4
[OUTn+]
1
80Ωmin*
36V
SSR
+
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 13 of 38
RoHSArgus PLUS Module EtherCAT GEM
ANALOG INPUT: AIN1
OPTO-ISOLATED OUTPUTS: OUT1, OUT2, OUT3, OUT4
Asareferenceinputittakesposition/velocity/torquecommandsfromacontroller.Ifnotusedasacommandinput,itcanbeusedasgeneral-purpose analog input.
• ±10 Vdc, differential• 12-bit resolution• Programmablefunctions
• Digital, opto-isolated• MOSFEToutputSSR,2-terminal• Flyback diode for inductive loads• 24VCompatible• Programmablefunctions

SPECIFICATIONS
OutputHI Data Notes
VoutHI Voh 4.4 Vdc
IoutHI Ioh -8.0mAdc
Vout LO Vol 0.40 Vdc
IoutLO Iol 8.0mAdc
CONNECTIONS
Signal J4Pins
OUT 5 38
OUT 6 37
OUT 7 40
OUT 8 39
Sgnd 3,4,15,16,23,50
HI/LODEFINITIONS:OUTPUTS
Input State Condition
BRAKE [OUT9]
HI
Output transistor is OFF Brakeisun-poweredandlocksmotor Motorcannotmove Brake state is Active
LO
Output transistor is ON Brakeispowered,releasingmotor Motorisfreetomove Brake state is NOT-Active
SPECIFICATIONS
Output Data Notes
Voltage Range Max +30Vdc
Output Current Ids 1.0 Adc
J4CONNECTIONS
Pin Signal
45 Brake-24V
48 Brake-Gate
47 Brake-Out
46 Brake Gnd
+5 Vdc[OUT5~8]
±8 mA
RSgnd
J4
J4
Brake-Gate
10k
20k
Brake-24V
24V
BrkBrake-Out
Brake-Gnd
ii
+0
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 14 of 38
RoHSArgus PLUS Module EtherCAT GEM
HIGH-SPEED OUTPUT: OUT5, OUT6, OUT7, OUT8
• CMOS buffer• 74AHCT1G125• Programmablefunctions
• Brakeoutput[OUT9]• Opto-isolated• 24VCompatible• Programmablefunctions• Gate output to drive external MOSFET
CME2DefaultSettingforBrakeOutput[OUT9]is“Brake-ActiveHI” Active =Brakeisholdingmotorshaft(i.e.theBrake is Active) Motorcannotmove Nocurrentflowsincoilofbrake CME2I/OLineStatesshows[OUT9]asHI BRKOutputvoltageisHI(24V),MOSFETisOFF Servodriveoutputcurrentiszero Servo drive is disabled, PWM outputs are off Inactive=Brakeisnotholdingmotorshaft(i.e.theBrake is Inactive) Motorcanmove Currentflowsincoilofbrake CME2I/OLineStatesshows[OUT9]asLO BRK output voltage is LO (~0V), MOSFET is ON Servo drive is enabled, PWM outputs are on Servodriveoutputcurrentisflowing
Thebrakecircuitsareopticallyisolatedfromalldrivecircuitsandframeground.
OPTO-ISOLATED MOTOR BRAKE OUTPUT: OUT9

Signal J2Pins
Enc A 10
Enc /A 9
Enc B 12
Enc /B 11
EncX 16
Enc/X 15
+5V 19,20
Sgnd 8,18,21,22
Signal J2Pins
Sin(+) 2
Sin(-) 1
Cos(+) 4
Cos(-) 3
X 16
/X 15
+5V 19,20
Sgnd 8,18,21,22
Signal J2Pins
Sin(+) 2
Sin(-) 1
Cos(+) 4
Cos(-) 3
Ref(+) 24
Ref(-) 23
Sgnd 8,18,21,22
1k+5V
1k
+5V Out @ 500 mA
Signal Ground
Sin(+)
Sin(-)
Cos(+)
Cos(-)
Enc X
Enc /X
-
+
-
+
10k
121
J2
10k
121
Encoder
FG
sin
cos
+5V
0V
indx
10k
Sin
Cos
10k
Enc. Index
Resolver
FG
J2
Sin(+)
Sin(-)
Cos(-)
Cos(+)
Ref(+)
Ref(-)
Signal Gnd
R/DConversionSinS3 S1
S2
S4R1R2
Cos
Ref
1k+5V
1k
Encoder J2
FG
Enc. AA
Enc. BB
Enc. IndexX
Enc A
Enc /A
Enc B
Enc /B
Enc X
Enc /X
+5V
0V
+5V Out @ 500 mA
Signal Ground
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 15 of 38
RoHSArgus PLUS Module EtherCAT GEM
FEEDBACK CONNECTIONS
QUAD A/B ENCODER WITH FAULT PROTECTIONEncoderswithdifferentialline-driveroutputsarerequired(single-endedencodersarenotsupported)andprovideincrementalpositionfeedbackviatheA/Bsignalsandtheoptionalindexsignal(X)givesaonceperrevolutionpositionmark.TheMAX3097receiverhasdifferentialinputswithfaultprotectionsforthefollowingconditions:Short-circuits line-line: Thisproducesanear-zerovoltagebetweenA&/Awhichisbelowthe
differential fault threshold.Open-circuit condition: The 121Wterminatorresistorwillpulltheinputstogetherifeitherside(orboth)isopen.
Thiswillproducethesamefaultconditionasashort-circuitacrosstheinputs.Low differential voltage detection: Thisispossiblewithverylongcablerunsandafaultwilloccurifthe
differentialinputvoltageis<200mV.±15kV ESD protection: The3097Ehasprotectionagainsthigh-voltagedischargesusingtheHumanBodyModel.Extended common-mode range: Afaultoccursiftheinputcommon-modevoltageisoutsideoftherangeof-10Vto+13.2V
ANALOG SIN/COS INCREMENTAL ENCODERTheSin/Cosinputsareanalogdifferentialwith121Ωterminatingresistorsandaccept1Vp-psignalsintheformatusedbyincrementalencoderswithanalogoutputs,orwithServoTube motors.Theindexinputisdigital,differential.
QUAD ENCODER WITH INDEX
SIN/COS SIGNALS
A/B/X SIGNALS
Sgnd = Signal Ground
Sgnd = Signal Ground F.G.=FrameGnd
RESOLVERConnections to the resolver should bemadewithshielded cable that uses three twisted-pairs.Onceconnected,resolversetup,motorphasing,andothercommissioning adjustments aremadewith CME2software.Therearenohardwareadjustments.
RESOLVER SIGNALS

Signal J2Pins
Clk 16
/Clk 15
Data 14
/Data 13
Sin(+) 2
Sin(-) 1
Cos(+) 4
Cos(-) 3
+5V 19,20
Sgnd 8,18,21,22
Signal J2Pins
Data 14
/Data 13
+5V 19,20
Sgnd 8,18,21,22
SSI BiSS J2Pins
Clk MA+ 14
/Clk MA- 13
Data SL+ 12
/Data SL- 11
+5V 19,20
Sgnd 8,18,21,22
1k+5V
1k 1k+5V
1k
BiSSEncoder
MA+
MA-
SL+
SL-
FG
J2
Clk
Data
Master
Slave
V+
V-
+5V Out @ 500 mA
Signal Ground
Enc X
Enc /X
Enc S
Enc /S
750+5V
1k 1k+5V
1k
Encoder
Enc X
Enc /S
Enc S
Enc /S
FG
J2
Clk
DataData
Clk
+5V
0V
+5V Out @ 500 mA
A
A
B
B
Signal Ground
-
+
-
+
A
B
A
B
1k+5V
1k 1k+5V
1k
Encoder
Sin(+)
Sin(-)
Cos(+)
Cos(-)
Sin(+)
Sin(-)
Cos(+)
Cos(-)
Dat
/Dat
Clk
/Clk
FG
J2
Clk
Enc X
Enc /X
Enc S
Enc /SDataData
Clk
+5V
0V
+5V Out @ 500 mA
Signal Ground
10k
10k
121 Sin
Cos
10k
10k
121
sin
cos
Absolute-AEncoder
1.2k
1.2k
220
5V
SD+
SD-
J2
Battery
Enc S
Enc /SCmd
D-R
SDCmd
D-R
SD
MAX3362B0V
+5VV+
V-
+5V Out@ 500 mA
Signal Ground
Batt+
Batt-
+
-
1k
1k
5V
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 16 of 38
RoHSArgus PLUS Module EtherCAT GEM
FEEDBACK CONNECTIONS
SSI ABSOLUTE ENCODERTheSSI(SynchronousSerialInterface)isaninterfaceusedtoconnectanabsolutepositionencodertoamotioncontrollerorcontrolsystem.TheGEMdriveprovidesatrainofclocksignalsindifferentialformattotheencoderwhichinitiatesthetransmissionofthepositiondataonthesubsequent clock pulses. The polling of the encoder data occurs at the currentloopfrequency(16kHz).Thenumberofencoderdatabitsandcountspermotorrevolutionareprogrammable. Thehardwarebusconsistsoftwosignals:SCLKandSDATA.Dataissentin8bitbytes,LSBfirst.TheSCLKsignalisonlyactiveduringtransfers.Data is clocked out on the falling edge and clock in on the rising edge of the Master.
BiSS ABSOLUTE ENCODERBiSS is an - Open Source - digital interface for sensors and actuators. BiSSreferstoprinciplesofwellknownindustrialstandardsforSerialSynchronousInterfaceslikeSSI,AS-Interface®andInterbus®withadditional options. SerialSynchronousDataCommunication Cyclic at high speed 2 unidirectional lines Clock and Data Linedelaycompensationforhighspeeddatatransfer Request for data generation at slaves Safety capable: CRC, Errors, Warnings Bus capability incl. actuators Bidirectional BiSS B-protocol: Mode choice at each cycle start BiSSC-protocol:Continuousmode
ENDAT ABSOLUTE ENCODERTheEnDatinterfaceisaHeidenhaininterfacethatissimilartoSSIintheuseofclockanddatasignals,butwhichalsosupportsanalogSin/Coschannelsfromthesameencoder.ThenumberofpositiondatabitsisprogrammableasistheuseofSin/Coschannels.UseofSin/CosincrementalsignalsisoptionalintheEnDatspecification.
ABSOLUTE-A ENCODERThe Absolute A interface is a serial, half-duplex type that is electricallythesameasRS-485.Notethebatterywhichmustbeconnected.Withoutit,theencoderwillproduceafaultcondition.
ENDAT SIGNALS
ABSOLUTE-A SIGNALS
Note: Single (outer) shields should be connected at the controller end. Inner shields should only be connected to Signal Ground on the drive.
SSI,BiSS SIGNALS
Sgnd = Signal Ground
Sgnd = Signal Ground
• Absolute A• TamagawaAbsoluteA• PanasonicAbsoluteAFormat• Sanyo Denki Absolute A

Signal J1Pin
Mot U 41~46
Mot V 31~36
Mot W 21~26
Signal J2Pins
HallU 5
HallV 6
HallW 7
+5V 19,20
Sgnd 8,18,21,22
J1
PWM
+HV
0V
+
U
V
W
Motor3 ph.
Halls
+5V Out @ 500 mA
Signal Ground
+5V
0V
15K
100p
15KHall U+5V
J2
100p
15K
15KHall V+5V
100p
15K
15KHall W+5V
Hall A
Hall B
Hall C
HALL SIGNALS
MOTOR SIGNALS
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 17 of 38
RoHSArgus PLUS Module EtherCAT GEM
MOTOR CONNECTIONS
MOTOR PHASE CONNECTIONSThe drive output is a three-phase PWM inverter that converts the DC buss voltage (+HV)intothreesinusoidalvoltagewaveformsthatdrivethemotorphase-coils.Cableshouldbesizedforthecontinuouscurrentratingofthemotor.Motorcablingshouldusetwisted,shieldedconductorsforCEcompliance,andtominimize PWMnoise coupling into othercircuits.Themotorcableshieldshouldconnecttomotorframegroundforbestresults.
DIGITAL HALL SIGNALSHall signals are single-ended signals thatprovideabsolutefeedbackwithinoneelectricalcycleofthemotor.Therearethreeofthem(U, V, &W) and theymay be sourced bymagneticsensorsinthemotor,orbyencodersthathaveHalltracksaspartoftheencoderdisc. They typically operate atmuch lowerfrequenciesthanthemotorencodersignals,and are used for commutation-initializationafter startup, and for checking themotorphasing after the amplifier has switched tosinusoidalcommutation.

+
-
4
Controller
I/O
I/O
+
-
[IN4] HS
[IN5] HS
[IN6] MISO
DCPower
EarthCircuit Gnd
+HVFuse *
* Optional
J1
Aux HV
Drive Enable
DAC Out
DAC Ground
[IN1] HS
[IN7] ISO
[IN8] ISO
[AIN-]
Sgnd
[AIN+]
J2
Enable
PosLim+24V
NegLim
Signal Ground
J4
J4
BRK-GATE
[OUT6] MOSI
[OUT1-]
[OUT5] CLK
1~6
11~16
48
BRK-24V 45
BRK-GND 46
BRK-OUT 47
MOTOR
BRAKE
W
V
U
Motor W
Motor V
Motor U
21~26
31~36
41~46
Enc B
Enc /B
Enc X
Enc /X
Enc /A
Enc A
15
16
11`
12
9
10
Enc /S 13
Enc Sin(+) 2
Enc Sin(-) 1
Enc Cos(+) 4
Enc Cos(-) 3
Enc S 14
7
+5V ENC 20
Sgnd
Sgnd
Sgnd
RS422(+)
HV-GND
+5V ENC 19
1
18
27
[INCOM] ISO28
25
[IN9] ISO
[IN10] ISO
26
Enc A8
Enc /A7
Enc B10
Enc /B9
Enc X14
Enc /X13
Enc S12
Enc /S11
+5V Enc5
+5V Enc6
Sgnd3
Sgnd4
24
3
Sgnd 8
2
29
[OUT1+]30
[OUT2-]31
[OUT2+]32
[OUT3-]33
[OUT3+]34
[OUT4-]35
[OUT4+]36
21
22
19
[IN2] HS
[IN3] HS20
17
37
38
[OUT8] EN139
42
RS422-GND49
RS422(-)41
44
43
50
RxD
TxDGnd
Hall U
Hall V
Hall W
5
6
7
Motemp[IN11]
+5V ENC @ 500 mATotal, both outputs
17
21
22
18Position Commands
Velocity, Torque commands
Step Enc. Ch. A
Enc. Ch. B
CW
CCW Dir
50%PWM
Dir n.c.
RS-422
RS422(+)
RS422(-)
Gnd
RS-232
RxD
TxD
Gnd
±10VDAC
+24 VController
SPI Devices
These signals are the Multi-Port which is programmable to be either inputs or outputs
+24V
* 121Ω resistor on user mounting board
*
AbsoluteEncoder
(Full duplex)
X
/X
S
/S
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 18 of 38
RoHSArgus PLUS Module EtherCAT GEM
CONNECTORS & SIGNALS
CONNECTIONSFORABSOLUTEENCODERWITHDUPLEXCLOCK/DATA

+
-
4
Controller
I/O
I/O
+
-
[IN4] HS
[IN5] HS
[IN6] MISO
DCPower
EarthCircuit Gnd
+HVFuse *
* Optional
J1
Aux HV
Drive Enable
DAC Out
DAC Ground
[IN1] HS
[IN7] ISO
[IN8] ISO
[AIN-]
Sgnd
[AIN+]
J2
PosLim+24V
NegLim
Signal Ground
J4
J4
BRK-GATE
[OUT6] MOSI
[OUT1-]
[OUT5] CLK
1~6
11~16
48
BRK-24V 45
BRK-GND 46
BRK-OUT 47
MOTOR
BRAKE
W
V
U
Motor W
Motor V
Motor U
21~26
31~36
41~46
Enc B
Enc /B
Enc X
Enc /X
Enc /A
Enc A
15
16
11`
12
9
10
Enc /S 13
Enc Sin(+) 2
Enc Sin(-) 1
Enc Cos(+) 4
Enc Cos(-) 3
Enc S 14
7
+5V ENC 20
Sgnd
Sgnd
Sgnd
RS422(+)
HV-GND
+5V ENC 19
1
18
27
[INCOM] ISO28
25
[IN9] ISO
[IN10] ISO
26
Enc A8
Enc /A7
Enc B10
Enc /B9
Enc X14
Enc /X13
Enc S12
Enc /S11
+5V Enc5
+5V Enc6
Sgnd3
Sgnd4
24
3
Sgnd 8
2
29
[OUT1+]30
[OUT2-]31
[OUT2+]32
[OUT3-]33
[OUT3+]34
[OUT4-]35
[OUT4+]36
21
22
19
[IN2] HS
[IN3] HS20
17
37
38
[OUT8] EN139
42
RS422-GND49
RS422(-)41
44
43
50
RxD
TxDGnd
Hall U
Hall V
Hall W
5
6
7
Motemp[IN11]
+5V ENC @ 500 mATotal, both outputs
17
21
22
18Position Commands
Velocity, Torque commands
Step Enc. Ch. A
Enc. Ch. B
CW
CCW Dir
50%PWM
Dir n.c.
RS-422
RS422(+)
RS422(-)
Gnd
RS-232
RxD
TxD
Gnd
±10VDAC
+24 VController
SPI Devices
These signals are the Multi-Port which is programmable to be either inputs or outputs
+24V
A
/A
B
/B
X
/X
QUADA/B/X
DIGITALENCODER
Sin(+)
Cos(+)
Cos(-)
Sin(-) AnalogSin/CosEncoder
HALLS
U
V
W
* 121Ω resistors on user mounting board
*
*
*
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 19 of 38
RoHSArgus PLUS Module EtherCAT GEM
CONNECTORS & SIGNALS
CONNECTIONSFORINCREMENTALDIGITALORANALOGENCODERS

+
-
4
Controller
I/O
I/O
+
-
[IN4] HS
[IN5] HS
[IN6] MISO
DCPower
EarthCircuit Gnd
+HVFuse *
* Optional
J1
Aux HV
Drive Enable
DAC Out
DAC Ground
[IN1] HS
[IN7] ISO
[IN8] ISO
[AIN-]
Sgnd
[AIN+]
J2
Enable
PosLim+24V
NegLim
Signal Ground
J4
J4
BRK-GATE
[OUT6] MOSI
[OUT1-]
[OUT5] CLK
1~6
11~16
48
BRK-24V 45
BRK-GND 46
BRK-OUT 47
MOTOR
BRAKE
W
V
U
Motor W
Motor V
Motor U
21~26
31~36
41~46
Enc B
Enc /B
Enc X
Enc /X
Enc /A
Enc A
15
16
11`
12
9
10
24
Rslvr Sin(+) 2
Rslvr Sin(-) 1
Rslvr Cos(+) 4
Rslvr Cos(-) 3
Enc S 14
7
+5V ENC 20
Rslvr Ref(+)
Rslvr Ref(-)
Sgnd
Sgnd
RS422(+)
HV-GND
+5V ENC 19
1
18
27
[INCOM] ISO28
25
[IN9] ISO
[IN10] ISO
26
Enc A8
Enc /A7
Enc B10
Enc /B9
Enc X14
Enc /X13
Enc S12
Enc /S11
+5V Enc5
+5V Enc6
Sgnd3
Sgnd4
24
3
Sgnd 8
2
29
[OUT1+]30
[OUT2-]31
[OUT2+]32
[OUT3-]33
[OUT3+]34
[OUT4-]35
[OUT4+]36
21
22
19
[IN2] HS
[IN3] HS20
17
37
38
[OUT8] EN139
42
RS422-GND49
RS422(-)41
44
43
50
RxD
TxDGnd
Hall U
Hall V
Hall W
5
6
7
Motemp[IN11]
+5V ENC @ 500 mATotal, both outputs
17
21
22
23Position Commands
Velocity, Torque commands
Step Enc. Ch. A
Enc. Ch. B
CW
CCW Dir
50%PWM
Dir n.c.
RS-422
RS422(+)
RS422(-)
Gnd
RS-232
RxD
TxD
Gnd
±10VDAC
+24 VController
SPI Devices
These signals are the Multi-Port which is programmable to be either inputs or outputs
+24V
R1
R2
S3
S1
S2
S4
RESOLVER
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 20 of 38
RoHSArgus PLUS Module EtherCAT GEM
CONNECTORS & SIGNALS
CONNECTIONSFORRESOLVERS(-ROPTION)

Signal P1 Pin Signal
TX2TERM 65 66 TX2+
ECAT-SHLD 63 64 TX2-
RX2+ 61 62 RX2TERM
RX2- 59 60 ECAT-SHLD
TX1TERM 57 58 TX1+
ECAT-SHLD 55 56 TX1-
RX1+ 53 54 RX1TERM
RX1- 51 52 CAN_GND
RS422-GND 49 50 Sgnd
Brake-Out 47 48 Brk-Gate
Brake-24V 45 46 Brake-Gnd
RS232 RxD 43 44 RS232 TxD
RS422(-) 41 42 RS422(+)
HS[OUT8] SPI-EN1
39 40 [OUT7]HS
HS[OUT6] SPI-MOSI
37 38[OUT5]HS SPI-CLK
[OUT4-]ISO 35 36 ISO[OUT4+]
[OUT3-]ISO 33 34 ISO[OUT3+]
[OUT2-]ISO 31 32 ISO[OUT2+]
[OUT1-]ISO 29 30 ISO[OUT1+]
[IN7]ISO 27 28 ISO[INCOM]
[IN8]ISO 25 26 ISO[IN9]
Sgnd 23 24 ISO[IN10]
[IN6]HS SPI-MISO
21 22 HS[IN5]
[IN4]HS 19 20 HS[IN3]
[IN2]HS 17 18 HS[IN1]
Sgnd 15 16 Sgnd
Enc/X 13 14 EncX
Enc /S 11 12 Enc S
Enc /B 9 10 Enc B
Enc /A 7 8 Enc A
+5VENC 5 6 +5VENC
Sgnd 3 4 Sgnd
[AREF-] 1 2 [AREF+]
Signal P3 Pin Signal
RES-REF- 23 24 RES-REF+
Sgnd 21 22 Sgnd
+5VENC 19 20 +5VENC
[IN11] 17 18 Sgnd
ENC/X 15 16 ENCX
ENC /S 13 14 ENC S
ENC /B 11 12 ENC B
ENC /A 9 10 ENC A
HALLW 7 8 Sgnd
HALLU 5 6 HALLV
COS- 3 4 COS+
SIN- 1 2 SIN+
Signal J1 Pin Signal
+HV
2 1
+HV4 3
6 5
N/C8 7 HVAux
10 9 N/C
HVGnd
12 11
HVGnd14 13
16 15
N/C18 17
N/C20 19
Mot W
22 21
Mot W24 23
26 25
N/C28 27
N/C30 29
Mot V
32 31
Mot V34 33
36 35
N/C38 37
N/C40 39
Mot U
42 41
Mot U44 43
46 45
SIGNAL PIN PIN SIGNAL
STO-IN2(-) 1 2 STO-GND
STO-IN2(+) 3 4 STO-BYPASS
STO-IN1(-) 5 6 STO-IN1(-)
STO-IN1(+) 7 8 STO-IN1(+)
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 21 of 38
RoHSArgus PLUS Module EtherCAT GEM
DIMENSIONS IN[MM]
J4CONTROL
J3SAFETY
J1POWER&MOTOR
TOPVIEWViewedfromabovelookingdownonthe connectors or PC board footprint towhichthemoduleismounted
J1:HV&Motor Dualrow,2mm-centers 46positionfemaleheader SAMTEC SSQ-123-01-L-D
J2:Feedback Dualrow,2mm-centers 24positionfemaleheader SAMTEC SQT-112-01-L-D
J3:Safety Dualrow,2mm-centers 8positionfemaleheader SAMTEC SQT-104-01-L-D
J4:Control Dualrow,2mm-centers 66positionfemaleheader SAMTEC SQT-133-01-L-D
J2FEEDBACK
J4
J3
J2
J1

12
4546
Dual RJ-45 Connectorfor EtherCAT port
J3 EtherCAT
Ground plane
Ground plane
2 oz. copper traces
Dielectric layer
.007[0.178]
.0085[0.216]
.007 [0.178].007 [0.178]
PIN 1
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 22 of 38
RoHSArgus PLUS Module EtherCAT GEM
PRINTEDCIRCUITBOARDDESIGNFORETHERCATSIGNALS
EtherCATsignalroutingmustproduceacontrolledimpedancetomaintainsignalquality.ThisgraphicshowssomeprinciplesofPCboarddesignthatshouldbefollowed.Tracesfordifferentialsignalsmusthave controlled spacing trace-trace, trace thickness, and spacing above a ground plane. All these things and the properties of the dielectric betweengroundplaneandsignalsaffecttheimpedanceofthetraces. Thedimensionsshownherearetypical. Thegraphiconp.5detailingtheEtherCATconnectionsshowsresistorsandacapacitorinthedriveforterminatingtheunusedconductors.AsanalternativetoaddingtracesbacktothedriveconnectorJ4forthesesignals,thesamepartscanbeplacedontheboardattheRJ-45connector, leaving only the differential EtherCAT signals to be routed withcontrolledimpedance.
PRINTED CIRCUIT BOARD FOOTPRINT
TOPVIEWViewedfromabovelookingdownonthe connectors or PC board footprint towhichthemoduleismounted
J1SignalGrouping for current-sharing
See Note 1
PCBHardware: Qty Description Mfgr PartNumber Remarks 1 SocketStrip Samtec SSQ-123-01-L-D J1HV&Motor
1 SocketStrip Samtec SQT-112-01-L-D J2Feedback 1 SocketStrip Samtec SQT-104-01-L-D J3Safety 1 SocketStrip Samtec SQT-133-01-L-D J4Control 2 Standoff PEM KFE-4/40-8ET #4/40X1/4”
AdditionalHardware(notshownabove) 2 Screw,#4-40x1.25”PhillipsPanHeadExternalToothLockwasherSEMS,Stainless,orsteelwithnickelplating,
Torqueto3~5lb-in(0.34~0.57N·m)
J4
J3
J2
J1
Notes1.J1signalsofthesamenamemustbeconnectedforcurrent-sharing(seegraphicabove).2.TodeterminecopperwidthandthicknessforJ1signalsrefertospecificationIPC-2221.
(AssociationConnectingElectronicIndustries,http://www.ipc.org)3.Standoffsormountingscrewsshouldconnecttoetchonpcboardthatconnecttoframegroundformaximumnoisesuppressionandimmunity.

4X Ø0.12546X Ø0.040
98X Ø0.036
0.0787
0.0787
0.0787
0.10000.1000
0.30000.0170
0.0787
0.0902
0.27670.7327
0.3729
2.1000
2.8000
2.7106
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 23 of 38
RoHSArgus PLUS Module EtherCAT GEM
PRINTED CIRCUIT DRILLING DIMENSIONS
Notes:1.ThisshowsthedrillingdimensionslookingdownonthemountingsurfaceofthePCboard.
Dimensionsareininches
J1
J2
J3
J4

2.10 53.3
.13 3.2
.30 7.6
.30 7.6R.13 3.2
4.8
.01 0.3
2.80 71.1
.12 3
2.40 61
1.37 34.7
1.731.82 46.3
.30 7.6
3.10 78.7
1.58 40.2
.68 17.3
23.3
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 24 of 38
RoHSArgus PLUS Module EtherCAT GEM
DIMENSIONS
Dimensionsareininches[mm]

PEM broaching stud#4/40 X 1/4 in. longPart no. KFH-440-4ET
1/4 in. OD, 1.043 in. longPart no. 1678-440ALMOD-1.043
McMaster Carr screw#4-40 X 7/16 in. w/ spring lock
RAF spacer 4/40 thd
Part no. 91241A418
1.043 26.5± .005 in (0.12 mm)
0.67 16.9
17.3.68
1.63 41.4
McMaster Carr screw#4-40 X 5/8 in. w/ spring lockPart no. 91241A422
RAF spacer 4/40 thd1/4 in. OD, 13/16 in. longPart no. 1689-440-AL
.0240.62
PEM broaching stud#4/40 X 1/4 in. longPart no. KFH-440-4ET
.812 20.62
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 25 of 38
RoHSArgus PLUS Module EtherCAT GEM
MOUNTING
MOUNTINGWITHCONNECTORSONPCBOARDSeepage22forpartnumbersofconnectors.
MOUNTINGSOLDEREDTOPCBOARD

#4-40 Mounting Screws (4)
Thermal padHeatsink
Transparent Carriers (2)(Discard)
Argus Drive Heatplate
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 26 of 38
RoHSArgus PLUS Module EtherCAT GEM
1.Insertthedriveintothesocketsandpresssmoothlyuntiltheheatplateisrestingonthestandoffs.
2.Removeoneoftheclearplasticcarriersfromthethermalpad.
3.PlacethesideofthethermalpadwithoutthecarrierontotheArgusaluminumheatplatetakingcaretocenterthethermalpadholesovertheholesinthedriveheatplate.
4.Removethesecondclearplasticcarrierfromthethermalpad.5.Placetheheatsinkontothethermalpad.Takecaretoensurethattheholesintheheatsink,
thermalpad,anddrivealllineup.6.Insertthefour#4-40screwsthroughtheheatsinkandtorquethemto3~5lb-in(0.34~0.57N·m).
Applyasmallertorquetoeachscrewinrotationuntilthefinaltorqueisreached. Thiswillensureanevencontactbetweenthedriveandheatplateforbestthermaltransfer.
AnAOSMicroFazethermalpadisusedinplaceofthermalgrease.Thismaterialcomesinsheetformandchangesfromsolidtoliquidformasthedrivewarmsup.Thisformsanexcellentthermalpathfromdriveheatplatetoheatsinkforoptimumheattransfer.
STEPSTOINSTALL
HEATSINKINSTALLATIONUSINGTHEGEM-HKHEATSINKKIT
HEATSINK MOUNTING

0.00 W
5.00 W
10.00 W
15.00 W
20.00 W
25.00 W
disabled 0 A 5 A 10 A 15 A 20 A 25 A 30 A
Dissipation vs. Output Current & +HV
50
24
12
9
0 W
5 W
10 W
15 W
20 W
25 W
30 W
35 W
disabled 0 A 5 A 10 A 15 A 20 A 25 A 30 A
Dissipation vs. Output Current & +HV
85
48
24
14
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 27 of 38
RoHSArgus PLUS Module EtherCAT GEM
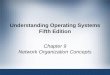
POWER DISSIPATION
Thechartsonthispageshowtheinternalpowerdissipationfordifferentmodelsunderdifferingpowersupply and output current conditions. The values on the chart represent the continuous current that the drivewouldprovideduringoperation.The+HVvaluesarefortheaverageDCvoltageofthedrivepowersupply.Toseeifaheatsinkisrequiredornot,thenextstepistodeterminethetemperaturerisethedrivewillexperiencewhenit’sinstalled.Forexample,iftheambienttemperatureinthedriveenclosureis40°C,andtheheatplatetemperatureistobelimitedto70°Corlesstoavoidshutdown,themaximumrisewouldbe70C-40C.or30°C.Dividingthisdissipationbythethermalresistanceof9ºC/Wwithnoheatsinkgivesadissipationof3.33W.Thislineisshowninthecharts.Forpowerdissipationbelowthisline,noheatsinkisrequired.Theverticaldashedlineshowsthecontinuouscurrentratingforthedrivemodel.
GEM-055-60
GPM-090-60
Output current Adc
Output current Adc
+HVvoltageVdc
+HVvoltageVdc
22 A
22 W
22 A
15 W

6
9
1
5
3 2TxD RxD
RJ-11on
ServoDrive
RJ-11 cable6P6CStraight-wired
5 3Gnd Gnd
RxD TxD2 5
D-Sub 9F
Dsub-9Fto RJ11Adapter
16
ISL32455
RS422(+)
RS422GND
RS422(-)TxD
RxDJ4/42
DevKitP9 Drive
J4J4/49
J4/411
2
3
4
5
3 12456 RS-232P7
TxD RxD
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 28 of 38
RoHSArgus PLUS Module EtherCAT GEM
DESCRIPTIONTheDevelopmentKitprovidesmountingandconnectivityforoneGEMdrive.Solderlessjumperseaseconfigurationofinputsandoutputstosupporttheirprogrammablefunctions.Switchescanbejumperedtoconnecttodigitalinputs1~10sothatthesecanbetoggledtosimulateequipmentoperation.DualEtherCATconnectorsmakedaisy-chain connections possible so that other EtherCAT devicessuchasCopley’sArgusPlusorXenusPlusEthercat drives can easily be connected.
SER-CKSERIALCABLEKITTheSER-CKprovidesconnectivitybetweenaD-Sub9maleconnectorandtheRJ-11connectorP8ontheDevelopmentKit.ItincludesanadapterthatplugsintotheCOM1(orother)portofaPCandusescommonmodularcabletoconnecttotheXEL.Theconnectionsareshowninthediagrambelow.
Don’tforgettoorderaSerialCableKitSER-CKwhenplacingyourorderforanGEMDevelopmentKit!
RS-232CONNECTIONTheRS-232portisusedtoconfigurethedriveforstand-aloneapplications,orforconfigurationbeforeitisinstalledintoanEtherCATnetwork.CME2™softwarecommunicateswiththedriveoverthislinkandisthenusedforcompletedrivesetup.TheEtherCATDeviceIDthatissetbytherotaryswitchcanbemonitored,andaDeviceIDoffsetprogrammedaswell.TheRS-232connector,P7,isamodularRJ-11typethatusesa6-positionplug,fourwiresofwhichareusedforRS-232.Aconnectorkitisavailable(SER-CK)thatincludesthemodularcable,andanadaptortointerfacethiscablewitha9-pinRS-232portonacomputer.
DEVELOPMENT KIT
RS-422COMMUNICATIONSRS-422isatwo-wiredifferentialhalf-duplexportthatoperatesfrom9600to230.4kbps.ConnectionstotheRS-422 port are through P9. ThegraphicbelowshowstheconnectionsbetweenaGEMandacomputerRS-422port.

16
AMP STAT
18 1
IN OUT
L/A L/A
8
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 29 of 38
RoHSArgus PLUS Module EtherCAT GEM
S2 S1
HEX DEC
0 0 0
1 16 1
2 32 2
3 48 3
4 64 4
5 80 5
6 96 6
7 112 7
8 128 8
9 144 9
A 160 10
B 176 11
C 192 12
D 208 13
E 224 14
F 240 15
EtherCAT DeviceIDSwitch Decimalvalues
SW1 x1
SW2 x10
EtherCAT DEVICEIDInanEtherCATnetwork,slavesareautomaticallyassignedfixedaddressesbasedontheirposi-tiononthebus.Whenadevicemusthaveapositiveidentificationthatisindependentofcabling,aDeviceIDisneeded.IntheGEMDevKit,thisisprovidedbytwo16-positionrotaryswitcheswithhexadecimalencoding.ThesecansettheDeviceIDofthedrivefrom0x01~0xFF(1~255decimal).Thechartshowsthedecimalvaluesofthehexsettingsofeachswitch.Example1:FindtheswitchsettingsfordecimalDeviceID107:
1)FindthehighestnumberunderS2thatislessthan107andsetS2tothehexvalueinthesamerow:96<107and112>107,soS2=96=Hex6
2)Subtract96fromthedesiredDeviceIDtogetthedecimalvalueofswitchS1andsetS1totheHexvalueinthesamerow:S1=(107-96)=11=HexB
CME2->Amplifier->NetworkConfiguration
CME2->Input/Output->DigitalOutputs
ETHERCATCONNECTIONSDualRJ-45socketsacceptstandardEthernetcables.TheINportconnectstoamaster,ortotheOUTportofadevicethatis‘upstream’,betweentheStepnetandthemaster.TheOUTportconnectsto‘downstream’nodes.IfStepnetisthelastnodeonanetwork,onlytheINportisused.NoterminatorisrequiredontheOUTport.
ETHERCATSTATLEDThebi-colorSTATLEDcombinesthefunctionsoftheRUNandERRLEDs. Greenandredcolorsalternate,andeachcolorhasaseparatemeaning:Greenisthe“RUN”orEtherCATStateMachine: Redisthe“ERR”indicator: Off = INITstate Blinking = Invalidconfiguration Blinking = PRE-OPERATIONAL SingleFlash = Unsolicitedstatechange SingleFlash = SAFE-OPERATIONALDoubleFlash =Applicationwatchdogtimeout On = OPERATIONAL
P7
P8
AMP LEDA bi-color LED gives the state of the drive. Colors do not alternate, and can be solid ON or blinking.Whenmultipleconditionsoccur,onlythetop-mostconditionwillbedisplayed. Whenthatconditionisclearedthenextonebelowwillshown.
1)Red/Blinking = Latchingfault.OperationwillnotresumeuntildriveisReset. 2)Red/Solid = Transientfaultcondition.Drivewillresumeoperationwhen theconditioncausingthefaultisremoved. 3)Green/Slow-Blinking = DriveOKbutNOT-enabled.Willrunwhenenabled. 4)Green/Fast-Blinking = PositiveorNegativelimitswitchactive. Drivewillonlymoveindirectionnotinhibitedbylimitswitch. 5) Green/Solid = Drive OK and enabled. Will run in response to referenceinputsorEtherCATcommands. Latching FaultsDefaults Optional(programmable) • Shortcircuit(Internalorexternal) • Over-voltage • Driveover-temperature • Under-voltage • Motorover-temperature • MotorPhasingError • FeedbackError • CommandInputFault • FollowingError
L/A(LINK/ACT)LEDAgreenLEDindicatesthestateoftheEtherCATnetwork:LED Link Activity Condition ON Yes No Port Open Flickering Yes Yes PortOpenwithactivity Off No (N/A) Port Closed
ETHERCAT

STO MutingConnections
FPGA
PWM HI
PWM LO
Channel 1
STO-Bypass (6.5 mA)
STO-Gnd (Sgnd)
P5
STO-IN2+
STO-IN1+
Channel 2
Channel 3
STO-IN1-
STO-IN2-
STO-IN1+
STO-IN1-
4
5
2
1
3
6
7
8
9
EN
HI
LO
GateDrivers
PWMOutputs
+HV
Frame Gnd
SH
LD
AB
B1B2B3B4B5B6B7B8
R3475R3475
44248-0029J10
SH
LD
A1A2A3A4A5A6A7A8
J10
AB
R3375R3375
R3275R3275
R3175R3175
R361MR361MC10
0.01UF200V
C100.01UF200V
R351MR351MC9
0.01UF200V
C90.01UF200V
TX1+TX1-
TX2+TX2-
RX1+RX1-
RX2+RX2-
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 30 of 38
RoHSArgus PLUS Module EtherCAT GEM
SAFE TORQUE OFF (STO)DESCRIPTIONIftheSTOfeaturewillnotbeused,theSTOfunctioncanbedisabledbyaddingjumperstoaconnectorforP5asshownbelow.
ETHERCAT CONNECTORSETHERCATCONNECTORSDualRJ-45connectorsthatacceptstandardEthernetcablesareprovidedforEtherCATconnectivity.

JP6A
JP6B
JP10D
J4/21 [IN6] SPI_MISO
J4/37 [OUT6] SPI_MOSI
[OUT6] Red/Green LED
[OUT7] Red/Green LED
[OUT8] Red/Green LED
J4/40 [OUT7] SPI_SCLK
J4/39 [OUT8] SPI_SS1
10k
10k
Switches
74HC165
Q7
D0 8
4
2
1
8
4
2
1
D1
D2
D3
D4
D5
D6
D7
Vcc
+5V SEL
+5V SEL
+5V SEL
Gnd
SW2 x1
SW1 x10
CKE
SDI
PL
CLK
[OUT6]
[OUT7]
[OUT8]
JP7F
JP6C
SW13
JP6D
JP10BP6/38
P6/5
P6/4
[IN6]P6/12
JP10C
JP141
2
3
1
2
3
+5V SEL
JP14
P2/1+5V EXTExternal +5V
From DevKitP2-1
+5V outputfrom module J2 J2/19,20
+5V INT
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 31 of 38
RoHSArgus PLUS Module EtherCAT GEM
5V POWER SOURCESPowerforcircuitsontheDevelopmentKit(+5VSEL)canbesuppliedeitherfromthe5Vfromtheservodrive(+5VENC),orfromanexternal+5V
powersupply(+5EXT).JumperJP14selectsthesourceofthe+5VSELfromeitherthedriveorfromtheexternalsource.
ETHERCATDEVICEID(STATIONALIAS)SWITCHCONNECTIONSThegraphicbelowshowstheconnectionstotheEtherCATDeviceIDswitches.Thesearereadafterthedriveisreset,orpowered-on.Whenchang-ingthesettingsoftheswitches,besuretoeitherresetthedrive,ortopoweritoff-on.Outputs[OUT5,6,8]andinput[IN6]operateasanSLI(Switch&LEDInterface)portwhichreadsthesettingsontheEtherCATDeviceIDswitches,andcontrolstheLEDsontheserialandCANportcon-nectors.InadditiontotheSLIfunction,theportcanoperateasanSPIinterface.Thejumpersmarkedwithred“X”shouldberemovedsothatSW13,orexternalconnectionstothesignalsdonotinterferewiththeoperationoftheSLIport.The“X”on[OUT6]showsthatnoconnectionsshouldbemadetothisbytheuserwhentheSLIportisactive.
CME2->Input/Output->DigitalOutputs
ETHERCAT DEVICE ID SWITCHES

+24V +24V +24V
SW8
P6/7
P6/8
P6/9
P6/10
P6/11
P6/12
P6/13
P6/14
P6/15
P6/30
JP7A
JP7B
JP7C
JP7D
JP7E
JP7F
JP7G
+24V +24V
JP7H
JP8A
JP8B
JP8C
IN7~10COMM
SW9 SW4SW10 SW11 SW12 SW13 SW3 SW5 SW6
IN1
IN1
IN2
IN2
IN3
IN3
IN4
IN4
IN5
IN5
IN6
IN6
IN7
IN7
IN8
IN8
IN9
IN9
IN10
IN10SW7
COMM
TomoduleInputs
[IN1]
[IN2]
[IN3]
[IN4]
[IN5]
[IN6]
[IN7]
[IN8]
[IN9]
[IN10]
P6
1 16 31
15 30 44
5V SEL
JP9C JP9DJP9A
DS3 DS4 DS5 DS6 DS7 DS8 DS9 DS10
JP9B JP10A JP10B JP10C JP10D
OUT1+
OUT1-
OUT6 SPI_MOSI
OUT7 SPI_SCLK
OUT8 SPI_SS1
OUT2+
OUT2-
OUT3+
OUT3-
OUT4+
OUT4-
OUT5
Tomoduleoutputs
[OUT1+]
[OUT1-]
[OUT2+]
[OUT2-]
[OUT3+]
[OUT3-]
[OUT4+]
[OUT4-]
[OUT5]
[OUT6]
[OUT7]
[OUT8]
red
green
1k
1k
P6
1 16 31
15 30 44
JP9G JP9HJP9E JP9F
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 32 of 38
RoHSArgus PLUS Module EtherCAT GEM
LOGICOUTPUTSTherearelogicoutputsthatcandrivecontrollerlogicinputsorrelays.Ifrelaysaredriven,thenflybackdiodesmustbeconnectedacrosstheirterminalstoclampovervoltagesthatoccurwhentheinductanceoftherelaycoilissuddenlyturnedoff.Outputs5,6,7&8areCMOStypesthatpullupto5Vordowntoground.WhentheseoutputsgohighitturnsonthegreenLED.Whentheyarelow,theredLEDisturnedon.Outputs1,2,3,&4aretwo-terminalopto-isiolatedtypes.Withthejumpersinplaceasshown,whentheoutputsareONtheywilldrivecurrentthroughtheLEDsDS3~6.
LOGICINPUTS&SWITCHESTheDevelopmentKithasjumpersthatcanconnecttheGEMdigitalinputstoswitchesonthekit,ortotheSignalconnectorP8.Asdelivered,allofthesejumpersareinstalledasshown.Ifconnectingtoexternaldevicesthatactivelycontrolthelevelofaninput,itisdesirabletodisconnecttheswitchwhichcouldshorttheinputtoground.Forexample,if[IN1]isconnectedtoanexternaldevicefortheEnablefunction,thenjumperJP7AshouldberemovedtotaketheswitchSW1outofthecircuit.Thefigurebelowshowstheseconnections.
CONNECTORS & SIGNALS

P4/13
P4/12
P4/11
P4/10
P4/9
P4/8
JP11
A
1k
221
130
121
121JP1B
JP1C
JP1A
JP1D
DS11 +5V SEL
+5V SEL
+5V INT
DS12
DS13
DS14
DS15
DS16
DS17
JP11
B
Tomodule
Tomodule
Tomodule
Tomodule
Enc A
Enc /A
Enc B
Enc /B
Enc X
Enc /X
P4/15Enc S
P4/14
P4/19
P4/18
P4/21
P4/20
P4/2
P4/3
P4/4
P4/7
P4/6
P4/17
P4/5
P4/16
P4/25
P4/26
Enc /S
Enc Sin(+)
Enc Sin(-)
Enc Cos(+)
Enc Cos(-)
Motemp
[IN11]
JP8D
Hall U
Hall V
Hall W
Signal Gnd
+5V ENC
+5V ENC
Signal Gnd
Signal Gnd
Signal Gnd
1k10k
10k
750
+5V INT
7.5k
2.49k
7.5k
2.49k
3.01k
1.0k
SW14
1
2
3
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 33 of 38
RoHSArgus PLUS Module EtherCAT GEM
MOTOR FEEDBACK CONNECTOR P4Formotorswithdifferentialencoders:installjumpersJP1B,JP1C,JP1AtoconnectterminatorsacrossA,B,andXinputs.Formotorswithsingle-endedencoders:removejumpersJP1B,JP1C,JP1Atodisconnecttheterminators.
ThenusetheA,B,andXinputsfortheencoder.The/A,/B,and/Xinputsarethenbiasedbydividerstoworkwith the single-ended encoder signals.
Amotortemperaturesensorthatconnectsto[IN11]musthavejumperJP8DremovedtopreventswitchSW14from groundingtheMotemp[IN11]signal.
AbsoluteencoderssuchastheNikonAtypethatuse2-wirebidirectionalsignalsrequirebiasingthelineswhentheyareinaquiescentstate. JumpersJP11A,JP11B,andJP1Dmustbeinplacetoprovidelineterminationandbiasing.
LED’sareprovidedtoshowthestatusoftheencoderandHallsignals.
FEEDBACK CONNECTOR & SIGNALS

ii
4
4
3
2
1
20k
10k 46
45 BRK-24V
BRK-DRV
BRK-KIT
BRK-GND
47
48
J4Drive P1
P2Development Kit
Brake300 mA max
Brake8 A max
+24V
0V
JP3C JP3D
JP3A
JP3B
+HVAUX
3P2
SGND
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 34 of 38
RoHSArgus PLUS Module EtherCAT GEM
BRAKE CONNECTOR & SIGNALS
ThebrakecircuitintheGEMisopticallyisolatedfromtheotherdrivecircuits.AndthebrakecircuitintheDevelopmentKitisisolatedfromothercircuitsinthekit.Jumpersareprovidedthatconnectthekitbrakecircuitstothe+24V(HVAUX)powerand+HVCOM(HVpowergroundandSignalGround). Withthejumpersinplace,supplying+24VtoP2-4andgroundtoP2-3willpowerthebrakecircuit. Whenthisisdonealow-currentbrakecanbeconnectedtoP1-3andP1-4,orahigher-currentbrakecanbeconnectedbetweenP1-4andP1-2.The+24Vpowersupplymustbeabletosupplytherequiredcur-renttoenergizethebrake.

+
-
4
4
[IN4]
[IN5]
DCPower
EarthCircuit Gnd
+HV InputFuse *
* Optional
P3
Brk-Gnd
Drive Enable
DAC OutDAC Ground
[IN1]
[IN2]
[IN3]
[AIN-]
Sgnd
[AIN+]
P4
EnablePosLim
NegLim
Signal Ground
P6
P1 Brk-24V
1
2
MOTOR
BRAKES
V
U
Motor W
Motor V
Motor U
3
4
5
Enc B
Enc /B
Enc X
Enc /X
Enc /A
Enc A
8
9
10
11
12
1
13
Enc /S 14
Enc Sin(+) 19
Enc Sin(-) 18
Enc Cos(+) 21
Enc Cos(-) 20
Enc S 15
4
3
2
1
6
Sgnd
Sgnd
Sgnd
Sgnd
Brk-Drv 400mA
8ABrk-Kit
(Optional)for encoder
and LED's
(Optional)
(Optional)
5 V+
+
-
-24 V
Aux HV
P2
+5V Input1
2
3
4
Sgnd
Sgnd
Sgnd
HV Gnd
5
+5V ENC
+5V ENC
17
3
1
7
8
9
6
2
11
[IN6]12
10
[IN7] ISO
[IN8] ISO14
13
[IN9] ISO
[IN10] ISO30
15
[INCOM] ISO28
[OUT1+]
[OUT1-]27
[OUT2+]41
42
[OUT2-] ISO
[OUT3+] ISO40
26
[OUT1-] ISO
[OUT4+] ISO39
25
[OUT4-] ISO24
Hall U
Hall V
Hall W
2
3
4
HALLS
U
V
W
Motemp[IN11]
+5V ENC
7
25
26
16
+5V @ 500 mA total from module
Position Commands Velocity, Torque commands
Step Enc. Ch. A
Enc. Ch. B
CW
CCW Dir
50%PWM
Dir n.c.
Enc B
Enc /B
Enc X
Enc /X
Enc /A
Enc A
Enc /S
Enc S
36
35
34
33
21
20
19
18
17
31
+
-24 V
/A
B
/B
X
/X
+5V
Sgnd
+5V
Sgnd
+5V
Sgnd
+5V
Sgnd
A
B
X
A
X
/X
S
/S
S
/S
Abs-A
Abs-BiSS
Inc-Di
Inc-S.E.
Single-ended encoders only supported on
Multi-Port
32
/A
B
/B
X
/X
+5V
Sgnd
A
CLK
/CLK
DAT
/DAT
DAT
DAT
Abs-A
Abs-BiSS
Inc-DiDigital EncoderConnections aresame on Feedbackand Multi-Port
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 35 of 38
RoHSArgus PLUS Module EtherCAT GEM
Note 2
DEVELOPMENT KIT CONNECTIONS

PIN SIGNAL PIN SIGNAL PIN SIGNAL
26 Signal Gnd 18 Sin(-) 9 EncX
25 Signal Gnd 17 +5VEnc 8 Enc/X
24 N.C. 16 Signal Gnd 7 [IN11]Motemp*
23 RslvrRef(+) 15 Enc S 6 +5VENC
22 Rslvr Ref(-) 14 Enc /S 5 Signal Gnd
21 Cos(+) 13 Enc A 4 HallW
20 Cos(-) 12 Enc /A 3 HallV
19 Sin(+) 11 Enc B 2 HallU
10 Enc /B 1 FrameGnd
Signal Pin+HV 1
HVGnd 2Motor W 3Motor V 4Motor U 5
Signal Pin+5Ext 1
Gnd 2 Gnd 3
AuxHV 4
Signal PinBRK-GND 1BRK-KIT 2
BRK-DRV 3BRK-24V 4
12
34
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 36 of 38
RoHSArgus PLUS Module EtherCAT GEM
P4 FEEDBACK
P1 BRAKE
P2
P1
P3
INPUTSWITCHES
JP1
P4
*SignalconnectionsonthePCboardareaffectedbyjumperplacement
P3MOTOR&+HVPOWER
P9 (See table on page 33)
P2AUXHV&+5V
DEVELOPMENT KIT CONNECTORS

Pin Signal
1 n.c.
2 RxD
3 Sgnd
4 Sgnd
5 Txd
6 n.c.
Pin Signal
1 N.C.
2 N.C.
3 RS422(-)
4 RS422(+)
5 RS422-GND
PIN SIGNAL PIN SIGNAL
1 FrameGnd 16 Signal Gnd PIN SIGNAL
2 [AIN-] 17 +5VENC 31 Signal Gnd
3 [AIN+] 18 /S Multi-Port 32 +5VENC
4 [OUT8]SPI-EN1 19 /XMulti-Port 33 S Multi-Port
5 [OUT7]SPI-CLK 20 /B Multi-Port 34 XMulti-Port
6 Signal Gnd 21 /A Multi-Port 35 B Multi-Port
7 [IN1]HS 22 Signal Gnd 36 A Multi-Port
8 [IN2]HS 23 [OUT5]SPI-CLK 37 Signal Gnd
9 [IN3]HS 24 [OUT4-]ISO 38 [OUT6]SPI-MOSI
10 [IN4]HS 25 [OUT3-]ISO 39 [OUT4+]ISO
11 [IN5]HS 26 [OUT2-]ISO 40 [OUT3+]ISO
12 [IN6]HS 27 [OUT1-]ISO 41 [OUT2+]ISO
13 [IN7]ISO 28 [INCOM]ISO 42 [OUT1+]ISO
14 [IN8]ISO 29 N.C. 43 N.C.
15 [IN9]ISO 30 [IN10]ISO 44 Signal Gnd
P6 CONTROL
P5 SAFETY
PIN SIGNAL PIN SIGNAL
1 FrameGnd 6 STO-1(+)
2 STO-1(+) 7 STO-1(-)
3 STO-1(-) 8 STO-BYPASS
4 STO-2(+) 9 STO-GND
5 STO-2(-)
16
95
16
AM
PST
AT
18
1
INO
UT
L/A
L/A
8
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 37 of 38
RoHSArgus PLUS Module EtherCAT GEM
P7 RS-232
P9 RS-422
P8ETHERCAT
P8
P9(Seetablebelow)
P7
P6
DEVELOPMENT KIT CONNECTORS
P5
See pinouts on page 28

GEM-055-60 GEM ServoDrive,30/60Adc,withencoderfeedback
GEM-055-60-R GEM ServoDrive,30/60Adc,withresolverfeedback
GEM-090-60 GEM ServoDrive,30/60Adc,withencoderfeedback
GEM-090-60-R GEM ServoDrive,30/60Adc,withresolverfeedback
16-01558DocumentRevisionHistoryRevision Date Remarks
00 March 27, 2017 Preliminaryversion
01 April 4, 2017 Initialreleasedversion
02 December6,2017 Added90Vmodels,change90Vmodelminvoltageto14Vdc,correctedDevKitmodelnumber, addedthermaldata,removelargeheatsink,addHSkittoaccessories.
03 June7,2018 CorrectionstoSTOgraphicandsignalnamings
Qty Ref Name Description Manufacturer P/N
GEK-090-01 DevelopmentKitforallGEMmodels
GEK-CK Connector Kit for DevelopmentKit
1 P3 HV&Motor Plug,5position,7.62mm,female Phoenix Contact: PC 5/5-STCL-7,62
1
P1Brake
Plug,4position,3.5mm,female Wago: 734-104/107-000
1 Strainrelief,snap-on,3.5mm,4position,grey Wago: 734-604
1 Tool Tool,wireinsertion&extraction,734series Wago: 734-231
1 P2 AuxHV Plug,4position,5.08mm,female Wago: 231-304/107-000
1
P5 Safety
Connector,DB-9M,9-position,standard,male TE/AMP: 205204-4
9 AMPLIMITEHD-20Crimp-Snapcontacts,24-20AWG,AUflash TE/AMP: 66506-9
1 MetalBackshell,DB-9,RoHS 3M: 3357-9209
4 Jumper,withpinscrimpedonbothends Copley: 10-75177-01
1P4 Feedback
Connector,high-densityDB-26M,26position,male,soldercup Norcomp: 180-026-103L001
1 MetalBackshell,DB-15,RoHS 3M: 3357-9215
1P6 Control
Connector,high-densityDB-44M,44position,male,soldercup Norcomp: 180-044-103L001
1 MetalBackshell,DB-25,RoHS 3M: 3357-9225
1 P9 RS-422 Connector,terminalblock,female,0.20in,5-position TE: 796634-5
SER-CK 1 P7 RS-232 Serial Cable Kit
GEK-NC-10P8 Network
EtherCATnetworkcable,10ft(3m)
GEK-NC-01 EtherCATnetworkcable,1ft(0.3m)
GEM-HK Heatsinkkit
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 P/N 16-01558 Rev 03 Page 38 of 38
RoHSArgus PLUS Module EtherCAT GEM
Note:Specificationssubjecttochangewithoutnotice
ORDERINGGUIDE
Example:OrderoneArgus Plus GEM drive,30/60Adcwithresolverfeedback,DevelopmentKit,ConnectorKit,SerialCableKit,andHeatsinkKitQty Item Remarks 1 GEM-055-60-R Argus Plus GEM servodrivewithresolverfeedback 1 GEK-090-01 DevelopmentKit 1 GEK-CK ConnectorKitforDevelopmentKit 1 SER-CK Serial Cable Kit 1 GEM-HK HeatsinkKit
ACCESSORIES
EtherCATisaregisteredtrademarkandpatentedtechnology,licensedbyBeckhoffAutomationGmbH,Germany.
ORDERING INFORMATION