Embed Size (px)
Citation preview

Approximate smiles in an extendedSABR model
d-fine
Exeter College
University of Oxford
A thesis submitted in partial fulfillment of the MSc in
Mathematical Finance
April 18, 2012

Abstract
Hagan’s asymptotic expansion fo the SABR model [27] is widely used by practitioners
for fitting the smile of vanilla interest-rate options. However, it is well known to break
down for very long dated options, large volatility of volatility or very small strikes. With
the current very low short-term rates in the market, deficiencies in the underlying CEV
model, namely an absorbing boundary at zero rates, become more acute. Thus, other
choices of local volatility such as shifted log-normal or shifted CEV receive more attention
as a basis for a stochastic-volatility extension. One recent empirical analysis of very long
time-series data for interest rates [26] suggests three regimes of interest rate dynamics
depending on the level of rates: log-normal behaviour at very low rates, normal dynamics
at intermediate rates and shifted log-normal behaviour at very large rates.
In this thesis, we review two types of approximation schemes used in the literature for the
standard, CEV-based SABR model: Asymptotic expansions for small time to maturity
τ as well as a mixing approach for ρ = 0 suggested by Barjaktarevich and Rebonato [48].
Both approaches are applied to an extended SABR model with a general local volatility
function C(f). Approximate results are compared to Monte Carlo and a two-dimensional
finite difference scheme for a few choices of C(f), including one that models the three
regimes of [26].

Contents
1 Introduction 1
2 Option pricing: Concepts and notation 8
3 Short time scales 11
3.1 The heat-kernel approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.1 Covariant form of pricing equation . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.2 Asymptotic expansion of the transition density . . . . . . . . . . . . . . . . . 14
3.1.3 Expected variance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.4 Time value of vanilla option . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.5 Implied volatility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Application to local volatility model . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Application to SABR model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.1 Geodesic distance: Hyperbolic geometry . . . . . . . . . . . . . . . . . . . . . 22
3.3.2 van-Vleck-Morette determinant . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.3 Parallel transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.4 Transition density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3.5 Marginal transition density and local volatility . . . . . . . . . . . . . . . . . 27
3.3.6 Implied volatility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Small correlation ρ 29
4.1 Time-inhomogeneous local volatility model . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Conditioning on volatility path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3 Distribution of total variance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.4 Hull and White Expansion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.5 Averaging with precalculated quantiles . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.6 Extension to finite ρ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5 Effective local volatility 38
i

6 Numerical methods 39
6.1 Finite difference methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.1.1 Methods for one-factor models . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.1.2 Extension to two-factor models . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.2 Monte Carlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7 Quantitative comparison of different approximation schemes 57
7.1 Local volatility models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
7.1.1 Constant elasticity of variance (CEV) . . . . . . . . . . . . . . . . . . . . . . 57
7.1.2 Shifted log-normal and shifted CEV . . . . . . . . . . . . . . . . . . . . . . . 63
7.1.3 Two- and three-regime local volatility models . . . . . . . . . . . . . . . . . . 64
7.1.4 Cubic toy local volatility model . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7.2 SABR model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.2.1 Standard SABR model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.2.2 Extended SABR model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
8 Conclusions 80
A Laplace method for one-dimensional integrals 81
B Sigma functions 83
C Moments of the exponential integral of Brownian motion 85
D Hagan’s approximation 88
Bibliography 90
ii

Chapter 1
Introduction
The SABR model [27] is the de facto market standard for the description of smiles in the pricing of
interest-rate derivatives. On the one hand, this ubiquity is due to a qualitatively correct description
of the time evolution of smiles as opposed to previously used local-volatility models. On the other
hand, the model is simple enough for analytical approximations of the implied volatility that allow for
a fast and stable calibration of model to market vanilla option prices. The most widely used of these
approximate smile formulas is already given in the original paper by Hagan and co-workers [27]. Since
it is an asymptotic expansion, the quality of the approximation is well-known to deteriorate for long
times to maturity, large volatility or volatility of volatility or very small strikes. Furthermore, the
CEV parameter β cannot in practice be extracted from the calibration procedure and is generally
fixed a priori to either of the choices β = 0 (normal), β = 1 (log normal) or β = 12 (CIR type
dynamics) depending on current market conditions and the school of thought of the institution.
An empirical determination of the ‘right’ β requires an analysis of very long time series data for
interest rates and/or interest rate options. In one recent work [26], three regimes of interest rate
dynamics where suggested depending on the level of rates: log-normal behaviour at very low rates,
normal dynamics at intermediate rates and shifted log-normal behaviour at very large rates. In the
modelling of interest rate smiles, there is thus a demand for improved solutions of the standard
SABR model as well as for an analysis of a SABR model with more general local volatility as a
basis.
Historically, the modelling of interest rate options has evolved in several stages, reflecting the
progress of academic ideas but also the maturity of the market and current market conditions.
Shortly after the celebrated pricing formula of Black, Scholes and Merton [11, 44] for stock options
was adopted by the market, a similar formula for interest rate caplets and swaptions [10] was soon
being applied,
CB(τ, f,K, σB) = D(t)[fN(d+) −KN(d−)] . (1.1)
Here, f is the current, time t, value of the forward rate or the swap rate, τ = T − t is the time to
maturity T , K is the strike of the option and σB is the volatility of the interest rate. Furthermore,
1

N(x) = 1√2π
∫ x
−∞ e−x2
2 dx denotes the normal cumulative distribution function,
d± =log f/K ± 1
2σ2Bτ
σB√τ
, (1.2)
and D(t) is the appropriate discount factor. For caplets, we have D(t) = αP (t, T2) where T2 is the
end of the forward period T to T2 and also the time of payment of the caplet, P (t, Ti) is the price
of the zero coupon bond paying at time Ti and α is the day-count fraction for the forward period
T to T2. For swaptions, D(t) = Lv(t) =∑N
i=1 αiP (t, Ti) is called the level where Ti, i = 0, . . . , N
with T0 = T denote the beginning and end of the swap periods and αi is the day-count fraction for
the ith period from Ti−1 to Ti. Eq. (1.1) rests on the assumption that the interest rate follows a
log-normal dynamics with constant volatility. The forward rate respectively the swap rate Ft can
be written as
Ft =1
α
P (t, T ) − P (t, T2)
P (t, T2), Ft =
P (t, T0) − P (t, TN)
Lv(t), (1.3)
i.e. they are ratios of portfolios of tradeable assets to the zero coupon bond P (t, T2) or the level
Lv(t), respectively. If P (t, T2) or the level is chosen as a numeraire, the rate is then a martingale
in the respective measure according to the martingale pricing theorem (see also Chap. 2). Together
with the assumption of a log-normal dynamics with constant volatility, the interest rate Ft in the
pricing measure evolves according to the stochastic differential equation,
dFt = σBFtdWt , (1.4)
where Wt is a standard, driftless Brownian motion in the terminal or swap measure respectively.
Taken literally, Eqs. (1.1) and (1.4) imply that all options on the same interest rate should be
priced with the same volatility σB independent of the strike. Since forward rates with different
maturities could be considered to be identical, just at different stages of their lives depending on
the remaining time to maturity, one could argue that options for all strikes and maturities should
be priced with the same volatility σB. However, when current prices observed in the market are
compared to Black prices,
CB(τ, f,K, σimpl.(τ,K)) = Cmarket(τ,K) , (1.5)
it is observed that the implied volatilities1 σimpl.(K, τ) do exhibit a term structure, i.e. a dependence
on the time to maturity τ , as well as a smile, i.e. a dependence on the strike K. To model such
dependencies, the assumption of a constant σB has to be relaxed. A time-inhomogeneous model,
dFt = σ(t)FtdWt , (1.6)
1A conversion to implied volatilities is always possible and unique as observed call prices are always above thepayoff at maturity and Eq. (1.1) as a function of the volatility σB is monotonous.
2

could account for a term structure. In this case Black’s formula (1.1) still remains valid when σB is
replaced by the root-mean-square volatility σr.m.s.(t, T ) given by
σ2r.m.s.(t, T ) =
1
T − t
∫ T
t
σ2(s)ds . (1.7)
Similarly, smiles can be described when the instantaneous volatility is allowed to also depend on the
level of interest rates in so-called local-volatility models,
dFt = σL(Ft, t)FtdWt . (1.8)
The implied volatility σimpl.(K, τ) is not directly related to the local volatility σL(f, t). In particular,
σimpl.(K,T − t) 6= σL(K, t). Generally speaking, σI can only be obtained by solving the valuation
problem with time- and level-dependent σL(f, t) and inverting Eq. (1.5) for σimpl.. Dupire [18] has
shown that for a given complete set of market option prices Cmarket(K, τ) a unique σL(f, t) can be
determined that produces these prices. Using the forward Kolmogorov equation for the transition
density (see Chap. 2) and the particular European call payoff, one can easily show the relation
∂T C =1
2σ2L(K,T )K2∂2
KC , (1.9)
where C(t) = C(t)/D(t) is the option price normalized by the appropriate discount factor (nu-
meraire). If a sufficiently complete set of European option prices can be extracted from the market
such that derivatives with respect to expiry T and strike K can be taken numerically, Eq. (1.9) can
in principle be inverted to obtain σL(K,T ). However, this procedure turns out to be numerically
very unstable. Nevertheless, discrete versions of Eq. (1.8) on a tree can be fitted to market data of
vanilla options by forward induction and used for pricing exotics [18, 16].
By construction, local-volatility models yield a perfect fit of current market prices. However,
as pointed out by Hagan [27], the time evolution of future smiles implied by today’s fit is contrary
to what is actually observed in the market. A non-monotonous smile has its minimum close to
the at-the-money point. The minimum of the smile tracks the underlying rate when the latter
changes over time. On the contrary, a local volatility model predicts a movement of the smile in the
opposite direction of the underlying. A local-volatility model thus requires frequent re-calibration
upon movements of the underlying. Hence, hedges based on the model also need re-adjustments
leading to higher hedging costs. A satisfactory description of the dynamics of the smile is thus
essential for good hedges.
For a better description of the dynamics of the smile, Hagan and co-workers proposed to use a
stochastic volatility extension of the well-known CEV model of the following form,
dFt = αtC(Ft)dW1t ,
dαt = ναtdW2t , (1.10)
3

where W 1t and W 2
t are two correlated Brownian motions with d[W 1,W 2]t = ρdt, and C(f) = fβ is
the local volatility function of the CEV model. Option prices in this model are thus a function of
the five parameters f = F0, α = α0, β, ρ, ν the initials of which (omitting f and ν) form the catchy
acronym SABR for ’stochastic alpha beta rho’. The achievement of the original paper [27] was
to provide an analytical approximation for the implied volatility and to use it to gain an intuitive
understanding of their influence on the form of the smile. Roughly speaking, α determines the
overall level of the implied volatility, β and ρ together control the skew of the smile and ν influences
its convexity. In practice, matters are not quite as clean, but the given analytical approximation
(see formulas in App. D) is quite accurate for moderately large times to maturity and the market
conditions when the approximation was introduced. Thus it can be used to obtain quick fits to the
smile implied by market quotes of vanilla options. Due to this simplicity the model together with
the analytical approximation was soon adopted by practitioners as the market standard to describe
option smiles. Within the SABR model, only interest-rate options can be priced that depend on
the dynamics of a single interest rate. For exotics that depend on several maturities on the yield
curve, market models are needed that describe in an arbitrage-free way the dynamics of the entire
curve. To do so and simultaneously treat smiles in a consistent manner, LIBOR market models with
a stochastic-volatility extension that for an individual rate closely resemble the SABR dynamics
have been proposed by several authors (see [51] for an overview and references). These LMM-SABR
models are not discussed in this thesis.
The SABR model should be distinguished from its approximate solution by the Hagan expansion.
Indeed, by now it is clearly understood that the expansion deteriorates for long times to maturity
τ , high volatility α and volatility of volatility ν as well as very low or high strikes K. In particular,
for very low strikes the probability density for the rate implied by the approximation can become
negative. In recent market conditions of very low short term rates, this pathology becomes more
relevant.
In the search for better approximations to the SABR model, new insights and cleaner approxi-
mation schemes have been obtained by applying methods from differential geometry (see the presen-
tations [37] and [38]). Hagan and co-workers have derived representations of the transition density
of the SABR model in this context and also a ’refinement’ of their original approximation for the
implied volatility [28], which however does not seem to be widely used in practice. Labordere has
generalized the approach to a wider class of stochastic volatility models including a new λ-SABR
model with a mean-reverting volatility process [30]. He also obtains approximate solutions of a
SABR-extended LIBOR market model [32] as well as a classification of solvable local and stochastic
volatility models [31]. Exact integral representations for the standard SABR model with β = 0 or
β = 1 have been given by several authors [28, 30, 40]. Paulot has pushed the asymptotic expansion
of the implied volatility to second order in the time to maturity τ [46]. For small τ , the second order
4

smile formula improves the agreement with numerical solutions. However, for larger τ the patholo-
gies at low rates and strikes become worse by the increased order. A different line of attack that also
yields an expansion of the implied volatility for small τ was pursued by Berestycki and coworkers
[9] who give rigorous proves for the limit τ → 0 and derive a non-linear partial differential equation
directly for the implied volatility. Their results were used by Ob loj to point out an inconsistency in
the original smile formula given in [27] that when corrected improves the pathologies at low strikes
[45].
The SABR model in Eq. (1.10) is among a range of so-called stochastic-volatility models in which
the volatility or the variance of the underlying is itself governed by a second stochastic process. Early
models in this class, such as the one proposed by Hull and White [34] were stochastic volatility
extensions of the Black-Scholes model for the underlying. The book by Lewis [40] gives a good
overview of solution methods for these types of models. A particularly popular model is the one
introduced by Heston [33] which is a so-called affine model. The generating function of the moments
of the underlying can be derived analytically and vanilla option prices can then be obtained by fast
Fourier transformation. Approximation schemes generally devised for stochastic-volatility models
might also have some bearing on the SABR model and its extension to general C(f). In particular,
we will discuss mixing solutions derived from the limit ρ = 0. Other interesting limits that will
not be discussed here in detail are long times to maturity [21, 19, 20], asymptotically large strikes
[7] as well as multiscale expansions for models with a quickly mean-reverting volatility [23, 22, 24].
However, the techniques used to derive asymptotic results for long times to maturity are related to
the mixing solutions and we will give some comments in this context.
The particular choice of stochastic processes in the SABR model was mainly motivated by an-
alytical tractability. As Hagan points out in his lectures, the model was put together in a hurry
as many others on the ’street’. The parameter β was introduced because people from different
institutions couldn’t agree on whether interest rates should be normal, log-normal or possibly in
between. With the free parameter, everybody can pick his or her favorite. In a sense, the SABR
model is thus a minimal model that allows for a description of both downward sloping smirks as
well as non-monotonic smiles. As such, it has well-known drawbacks (see e.g. Sec. 3.10 in [51] for a
more detailed discussion of these points). First, the volatility is purely log-normal. Thus, averages
for long times to maturity are dominated by a large number of paths with very low volatility and
very few paths with very high volatility. Intuitively, a mean-reverting feature that keeps volatilities
at intermediate levels appears more realistic. Second, the dynamics of the rates is based on the
CEV model which for 0 < β < 1 has an absorbing boundary at zero (see Sec. 7.1.1), i.e. once a
zero interest rate has been reached it will stay there forever according to the model. This behaviour
clearly contradicts what is observed in reality. Even if zero short-term rates are possible, monetary
authorities will surely not keep them there forever. The absorbing boundary has a significant effect
5

0f
C(f
)
θ 0f
C(f
)
fL
fL
fR 0
f
C(f
)
fc/3
fc
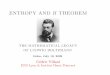
Figure 1.1: Local volatility functions C(f) used in this thesis. The standard and shifted CEV choiceis shown on the left. The middle panels contains the three regime model, whereas on the right weshow the cubic toy model.
on option prices for longer maturities since a considerable proportion of the probability density will
be trapped at zero. A third drawback stems from the fact that both β and ρ influence the skew of
the smile. As a consequence, β cannot be extracted from fits to vanilla option prices observed in the
market and has to be fixed a priori.
To answer the question of what the ’true’ coefficient β should be or more generally what the
volatility should be as a function of the level of the rates, a range of empirical studies have been
conducted. Evidence is either indirectly gathered from implied volatilities of option prices or directly
through the analysis of very long-dated interest-rate time series. An example of the first kind is the
study of time series of swaption implied volatilities as a function of the level of the rate [47], i.e. a
study of what Hagan and coworkers call the ’backbone’ of the smile. The direct approach is taken
by de Guillaume et al. who study very long time series for swap and government rates [26]. They
point out that previous attempts to obtain the CEV exponent β from fitting of time series data are
inconclusive and depend very much on the era considered. From the analysis of time series with a
length of up to about 40 years, they extract a universal dependence of the variability of rates on
the level of rates involving three regimes. At rates roughly below 1%, the dynamics is log-normal
and thus has no absorbing boundary at zero rates. At intermediate levels, roughly up to 5 or 6% a
normal regime sets in. Finally at very high rates, the dynamics is of shifted log-normal type.
To incorporate these empirical findings into tractable models for option pricing, we will consider
in this thesis the extension of the SABR model in Eq. (1.10) to more general choices of the local
volatility function C(f). Besides the standard SABR model with the CEV local volatility function
C(f) = fβ , (1.11)
we will mainly be interested in a three-regime piecewise linear C(f) that models the universal curve
found in [26], i.e.
C(f) =
f , f ≤ fL ,fL , fL ≤ f ≤ fR ,
fL + κ(f − fR) , f ≥ fR .(1.12)
6

Here, fL and fR are two regime-switching points. Note that the regimes here are of a static na-
ture. Dynamic switching between different types of dynamics has also been modeled and analysed
empirically [50, 49]. We will also briefly consider a shifted CEV local volatility function,
C(f) = (f + θ)β , (1.13)
which for β = 1 reduces to shifted log-normal behaviour. In the recent market environment with very
low interest rates, such a model can be appealing as it moves the problematic absorbing boundary
from zero to slightly negative rates −θ. It will turn out that the non-analytic nature of C(f) in
Eq. (1.12) at the regime switching points can cause trouble in the asymptotic expansion. We will
therefore also consider the following cubic toy model,
C(f) =fc3
[(f
fc− 1
)3
+ 1
]
. (1.14)
In a smooth way, this roughly models the main features of the universal curve found in [26], i.e. a
linear behaviour at low rates, a levelling off at intermediate rates and an increase at very high rates
again. Fig. 1.1 shows a visualization of the different local volatility functions used in this thesis.
Note that, although we consider different choices of the function C(f) here, the functional form is
not taken as an ingredient for fitting the smile contrary to very recent proposals for an extended
’ZABR’ model [2].
Our contribution in this thesis is two-fold. First, we review the heat-kernel expansion for small
times to maturity putting particular emphasis on expressing results in a way suitable to arbitrary
C(f) wherever possible. Second, it is shown that a mixing approach for ρ = 0 based on pre-calculated
quantiles of the distribution of the average variance as proposed by Barjaktarevic and Rebonato [48]
is applicable for arbitrary C(f) when combining it with numerical solutions of the underlying local
volatility model. This approach is particularly suited to analyse the influence of different functional
shapes of C(f) as it is fast and the numerical implementation does not depend on any particularities
of C(f). We compare the results of both the heat-kernel expansion and the mixing approach to
numerical results obtained from Monte Carlo as well as two-dimensional finite-difference schemes.
The thesis is organized as follows. In Chap. 2, we review some concepts of option pricing and
introduce the notation used in the subsequent chapters. Chap. 3 discusses analytical approximations
for short times to maturity. Chap. 4 treats the limit of vanishing correlation ρ between the forward
rate and the volatility process. The short Chap. 5 describes an effective local-volatility scheme
motivated by [2]. In Chap. 6, we introduce the numerical methods used to gauge the accuracy of
the analytical approximations. Chap. 7 compares the analytical and semi-analytical approximations
to numerics in terms of accuracy and computational speed. Finally, Chap. 8 gives a conclusion.
7

Chapter 2
Option pricing: Concepts andnotation
To derive option prices in the SABR model in Eq. (1.10), we invoke the fundamental theorem of
arbitrage-free pricing. This theorem states that assuming the absence of arbitrage opportunities and
some technical conditions, there exists a probability measure such that the price V (t) of a tradeable
asset normalized by another tradeable and strictly positive asset N(t) (numeraire) is a martingale,
i.e.V (t)
N(t)= E
[V (T )
N(T )|Ft
]
. (2.1)
Note that for the two-factor SABR model, the market is not complete and the pricing measure is
not uniquely determined from arbitrage arguments alone. Nevertheless, there is a unique observable
price in the market. One can then assume that according to the risk preferences of the participants,
the market has chosen a particular measure to price the options. For consistent pricing, the chosen
measure has to be extracted by calibrating model parameters to market prices. The conversion
between the real-world measure and the pricing measure involves two market prices of risks, one
for each factor. In practice, it is more convenient to express the model dynamics directly in the
pricing measure as has been done in Eq. (1.10). The absence of a drift term for the rate follows
directly from the fact that Ft can be expressed as the normalized price of a portfolio of tradeable
assets as shown in Eq. (1.3). The particular driftless form of the SDE for the volatility in Eq. (1.10)
on the contrary is a modelling assumption and does not follow from no arbitrage. All SDEs and
expectation values denoted by bold font E are with respect to the pricing measure, the physical
measure will never be invoked here. Note that the explicit construction of hedging portfolios in
incomplete market conditions is very non-trivial and will not be considered here. For an account of
hedging in the SABR and related market models, see [27] and [6] as well as the textbook [51] by
Rebonato and co-workers.
Now consider the case of caplets or swaptions and choose D(t) given below Eq. (1.2) as a nu-
meraire. It turns out that the payoff in both cases can be written as V (T ) = (FT −K)+D(T ). Thus
8

the normalized price of a caplet or swaption is given by
C(t) =C(t)
D(t)= [(FT −K)+|Ft] . (2.2)
From now on, we will always work with normalized option prices and drop the tilde for convenience.
For comparison with market quotes one thus would have to reintroduce the discount factor D(t) as
appropriate. Since the pair of processes (Ft, αt) is Markov, the option price can only depend on the
current levels of the state variables and not on their history, i.e. C(t) = C(t, Ft, αt). Applying Ito’s
lemma, the (normalized) option price evolves according to the following SDE,
dCt =
[∂C
∂t+
1
2α2tC(Ft)
2 ∂2C
∂f2+
1
2α2t
∂2C
∂α2+ ρνα2
tC(Ft)∂2C
∂f∂α
]
dt
+ [. . . ] dW(1)t + [. . . ] dW
(2)t . (2.3)
Since Ct is a Martingale according to the theorem of option pricing, the expression in the first square
bracket has to vanish. For the option price,
C(t, T, f, α) = E[(FT −K)+|Ft = f, αt = α], (2.4)
this yields the partial differential equation
[∂t + L]C = 0 , (2.5)
where the differential pricing operator is given by
L =1
2σ2C(f)2
∂2
∂f2+
1
2α2 ∂2
∂α2+ ρνα2C(f)
∂2
∂f∂α. (2.6)
The terminal condition of Eq. (2.5) is given by the payoff, i.e. C(T, T, f, α) = g(f) = (f − K)+.
The SABR model is homogeneous in time. As a consequence, the option value can only depend on
the time τ = T − t to maturity and not on T and t separately, i.e. C(t, T, f, α) = C(τ, f, α). The
pricing PDE in terms of τ now reads as
[∂τ − L]C = 0 , (2.7)
and the terminal condition is transformed into an initial condition C(0, f, α) = g(f).
Apart from the two-factor SABR model, we are also interested in the underlying one-factor
local-volatility model,
dFt = σC(Ft)dWt , (2.8)
where now σ is a constant. Repeating the same argument, the pricing operator becomes
L =1
2α2C(f)2
∂2
∂f2. (2.9)
For a concise notation in the next chapter, it will be convenient to introduce a common notation
for both the SABR and the local volatility models. To this end, we introduce the tupel Xt = (Ft, αt)
9

for the SABR model and Xt = Ft for the local vol model, respectively. The stochastic processes are
then of the general form,
dX it = σi(Xt)dW
it , (2.10)
where (σ1, σ2) = (αC(f), α) for the SABR model and σ1 = σC(f) for the local volatility model and
dW it dW
jt = ρijdt. The pricing operator then becomes,
L =1
2
n∑
ij=1
ρijσiσj∂2
∂xi∂xj. (2.11)
The price of a European option can also be written in terms of the transition density p(τ ;x, y),
V (t;x) = E[g(XT )|Xt = x] =
∫
p(T − t;x, y)g(y)dy . (2.12)
Formally, p(τ ;x, y) is the Arrow-Debreu price of an option with a delta-function payoff at maturity
and thus also follows the Kolmogorov backward Eq. (2.7), i.e.
∂
∂τp(τ ;x, y) = Lxp(τ ;x, y) , (2.13)
where the subscript x on the operator L indicates that derivatives are to be taken with respect to
the initial variables x. Occasionally, we will also need the Kolmogorov forward or Fokker-Planck
equation (for a derivation see e.g. [54]),
∂
∂τp(τ ;x, y) =
1
2
n∑
ij=1
∂2
∂yi∂yj
[
ρijσi(y)σj(y)p(τ ;x, y)]
. (2.14)
Using Eq. (2.14) and a partial integration, one can easily get the Dupire equation for a European
call option,
∂τV =
∫
(y(1) −K)+[∂τp]ddy =1
2
∫
[∂2y(1)(y
(1) −K)+]σ21pd
dy
=1
2
∫σ21δ(y(1) −K)pddy
∫δ(y(1) −K)pddy
∫
δ(y(1) −K)pddy
≡ 1
2K2σ2
loc(τ, x,K)∂2KV . (2.15)
For a local volatility model, this relation has already been given in Eq. (1.9). For a multi-factor
model, the second to last equality gives a precise definition of the effective local volatility as an
average in the full model.
10

Chapter 3
Short time scales
Starting with the original paper by Hagan et al. [27], the SABR model has been analysed by
using asymptotic expansions. The derivation in [27] makes use of singular-perturbation theory in
an artificial small parameter ǫ which is set to ǫ = 1 at the end of the derivation, but the result can
be recast as an asymptotic series in the time to maturity τ . The procedure hidden in an appendix
uses a lot of physical intuition and several transformations of variables the motivation of which are
rather hard to follow. Furthermore, some additional approximations geared towards the underlying
CEV model are used. Subsequent work in the literature by Hagan et al. [28] and others [30, 46]
have obtained cleaner derivations of similar series using the language of differential geometry. We
follow this later route here.
The key insight is to note that the pricing Eq. (2.7) can be recast as a heat or diffusion equation
in a curved space with a geometry given by the functional form of the prefactors of the derivatives.
The leading asymptotics of the transition density at small times is then similar to the Gaussian
transition density of an ordinary diffusion process, but with the distance |x− y| between the initial
and final points replaced by the so-called geodesic distance d(x, y), i.e. the length of the shortest
path connecting x and y in the curved space. This result was first proved by Varadhan [57, 56]
in the 1960s. Correction terms involve an expansion in powers of the time τ and can be obtained
with methods from theoretical physics that are e.g. used to obtain semi-classical expansions for the
Schrodinger equation in quantum mechanics in powers of Planck’s constant ~ as well as methods from
geometrical optics. The former also goes under the name of WKB expansion. It is also relatively
straight forward to obtain the leading asymptotics from a saddle-point approximation of a Feynman
path integral representation of the transition density (see e.g. Sec. 7.4 in [5]). However, correction
terms are more easily obtained within a differential-operator formalism. In the mathematics or
mathematical physics literature, the transition density is called the kernel of the heat equation
and the approach is therefore known as the heat-kernel expansion. A detailed introduction geared
towards applications in finance is given by Avramidi [5] whereas the manual by Vassilevich shows
11

applications in quantum field theory [58]. The basic ideas are also summarized in several publicly
available sets of presentation slides [37, 38, 39, 4].
The approach is somewhat heavy on notation as some basic concepts from differential geometry
as used in general relativity are needed. We give a brief summary here and refer the reader to [5] or
[46] and references therein for the details. The road map of Sec. 3.1 containing the general formalism
is as follows:
1. The pricing equation is recast in a covariant form using the language of differential geometry
and some of the concepts are explained on the way as needed.
2. The ingredients of the asymptotic expansion of the transition density are explained and moti-
vated, the result is then quoted without derivation.
3. An integral over the volatility variable α is carried out by the Laplace method to obtain the
marginal transition density as well as the average variance from the heat-kernel expansion of
the transition density.
4. An expansion for the time value of a vanilla European call option is obtained by a local time
integral over the average variance.
5. A similar expansion of the Black formula is matched to the expansion of the option value to
obtain a series expansion of the implied volatility in the time τ to maturity.
In Secs. 3.2 and 3.3 the general formalism is then applied to local-volatility models and the SABR
model with general C(f).
3.1 The heat-kernel approach
3.1.1 Covariant form of pricing equation
In order to make use of known results in the physics and applied mathematics literature, the back-
wards Kolmogorov Eq. (2.13) for the transition density is recast as a heat or diffusion equation on
a Riemannian manifold.1
The key ingredient in the definition of a Riemannian manifold is the metric tensor which allows
the measurement of lengths and angles. To make connection with the PDE approach to derivative
pricing, we identify the matrix elements of the inverse metric tensor with the coefficients of the
quadratic derivative part of the pricing operator in Eq. (2.11),
gij =1
2ρijσiσj . (3.1)
1A very accessible introduction to the concepts of differential geometry as needed for general relativity can e.g. befound in [13].
12

A matrix inversion then yields the components gij of the metric. Note that there is no summation
implied on the right-hand side of Eq. (3.1) whereas in the following, the Einstein summation con-
vention will be used throughout, i.e. an index appearing twice – once as upper and once as lower
index – is implicitly summed over.
The differential operator
L = gij∂ij + bi∂i + γ , (3.2)
constitutes a generalization of the pricing operator in Eq. (2.11) and includes also possible drift terms
bi and a discount term γ. The partial derivatives are shorthands for ∂i ≡ ∂∂xi and ∂ij ≡ ∂2
∂xi∂xj . The
operator L can be written in the following co-variant form,
L = gij∇Ai ∇A
j + Q = g−12 (∂i + Ai)g
12 gij(∂j + Aj) + Q , (3.3)
where g = det(gij) and ∇Ai is a co-variant derivative that contains the Levi-Civita connection Γk
ij
induced by the metric as well as an Abelian connection Ai. More precisely, the action ∇Ai on a
scalar φ is given by
∇Ai φ = [∂i + Ai]φ , (3.4)
whereas its action on a vector,
∇Ai V
j = [∂i + Ai]Vj + Γj
ikVk , (3.5)
as well as a co-vector,
∇Ai Vj = [∂i + Ai]Vj − Γk
ijVk , (3.6)
contains the connection given by Christophel’s symbols,
Γkij =
1
2gkp(∂jgip + ∂igpj − ∂pgij) . (3.7)
The action of the co-variant derivative on higher-rank tensors can be defined similarly, but will not
be needed in the following. Combining Eqs. (3.4) and (3.6), the Laplace-type operator L can be
expressed as
L = gij [(∂i + Ai)δkj − Γk
ij ][∂k + Ak] + Q . (3.8)
Sorting terms according to the number of derivatives involved, we see that in order for Eqs. (3.2)
and (3.3) to represent the same operator, the Abelian connection and the constant term need to be
chosen as follows,
Ai = gijAj =1
2[bi + gjkΓi
jk] =1
2[bi − g−
12 ∂j(g
12 gij)] , (3.9)
Q = gij(AiAj − bjAi − ∂jAi) + γ , (3.10)
The second equalities in Eqs. (3.3) and(3.9) can be obtained using
g−12 ∂j(g
12 gij) = −gjkΓi
jk . (3.11)
13

This identity is shown by straightforward algebra noting that the derivatives of a determinant and
the inverse of a matrix A with respect to a parameter l are given by ∂l det(A) = det(A)tr(A−1∂lA)
as well as ∂lA−1 = −A−1(∂lA)A−1.
A crucial concept in a curved space is that of parallel transport. Vectors rooted at different points
on a manifold live in different vector spaces, namely the tangent spaces of the respective points, and
can a priori not be compared to each other, i.e. their relative length or an angle between them is not
defined. For such a comparison to be meaningful, one vector needs to be transported to the root of
the other. This transport should occur without extra rotation of the vector. More precisely, a vector
field with components V j is said to be parallel transported along a curve x(s), if its directional
covariant derivative along the curve vanishes, i.e.
xi∇iVj = 0 . (3.12)
Here, the covariant derivative ∇i is given by Eq. (3.5) for A = 0. Note that the parallel transport of
a vector does in general depend on the chosen path C. The components of the vector v at the initial
point x and the final point y are related by a linear transformation vi(y) = P ij(x, y)V j(x) where P i
j
are the components of the parallel transport operator.
3.1.2 Asymptotic expansion of the transition density
Let us now state the central result that will be used in the following without prove (see e.g. [5] for
a thorough motivation and references): The transition density p(τ ;x, y) given by the initial value
problem,
[∂τ − Lx]p(τ ;x, y) = 0 , (3.13)
and
limτ→0
p(τ ;x, y) = δ(x− y) , (3.14)
has the following asymptotic expansion for small times τ ,
p(τ ;x, y) =
√
g(y)
(4πτ)n2
√
∆(x, y)P(x, y)e−d2(x,y)
4τ
∞∑
k=0
ak(x, y)τk , (3.15)
where the leading heat-kernel coefficient a0 = 1 and the subsequent two-point functions ak(x, y)
with k ≥ 1 are regular in the coincidence limit x → y. The meaning of the geodesic distance d, the
van-Vleck-Morette determinant ∆ and the Abelian parallel-transport operator P will be explained
in the following paragraphs. Furthermore, the coefficients ak satisfy the recursion relation,
ak+1(x, y) =1
d(x, y)k+1
∫
C(x,y)d(x′, y)kP(x′, y)−1∆− 1
2 (x′, y)Lx′∆12 (x′, y)P(x′, y)ak(x′, y)dx′ , (3.16)
where the integral is along the geodesic connecting x and y. Note that the line element dx′ =√
gij xixjds involves the metric tensor once a parametrization of the geodesic has been chosen.
14

The geodesic distance d(x, y) is defined as the minimal length of a curve between the points x
and y, i.e.
d(x, y) = minx(s),
x(0)=x,x(sf )=y
∫ sf
0
√
gij(x(s))xi(s)xj(s)ds . (3.17)
The minimizing curve C(x, y) is called a geodesic. Considering linear variations δx(s) to such an
optimal curve, a Legendre ODE can be derived as a necessary condition for a curve to be a geodesic.
Provided the curve is parametrized by its arc length (or a constant multiple thereof), the resulting
second-order ODE reads as,2
xi + Γijkx
j xk = 0 , (3.18)
where dots denote derivatives with respect to the arc length s and Γijk are Christophel’s symbols as
defined in Eq. (3.7). Alternatively, a geodesic can be defined as a curve whose tangent vector xi(s)
is parallel transported as one moves along the curve, i.e.
xi∇ixj = 0 . (3.19)
In other words, a geodesic generalizes the concept of a straight line to a curved geometry: Following
a geodesic, one moves forward ‘following ones nose’ without turning or twisting. Eq. (3.19) directly
yields Eq. (3.18) using the definition of the covariant derivative and xi∂ixj = xj .
The van-Vleck-Morette determinant ∆(x, y) is defined as
∆(x, y) = g(x)−12 det
(
− ∂2
∂x∂y
1
2d2(x, y)
)
g(y)−12 , (3.20)
and behaves as a scalar under coordinate transformations.
Similar to parallel transport induced by the Levi Civita connection and defined in Eq. (3.12), one
can consider a generalized parallel transport including the Abelian connection Ai, i.e. replacing
∇i → ∇Ai in Eq. (3.12). The effect of this inclusion is an additional scalar factor P(x, y) in the
parallel transport operator given by the line integral of A along the geodesic C(x, y),
P(x, y) = exp
(∫
C(x,y)Aidx
i
)
. (3.21)
Summarizing this subsection, we reexpress the heat-kernel expansion of the transition density
for small τ in Eq. (3.15) in a form useful for the following calculations,
p(τ, x, y) = τ−n2 A(x, y)e−
B(x,y)2τ
∞∑
k=0
ak(x, y)τk , (3.22)
where B(x, y) = 12d
2(x, y) and
A(x, y) =
√
g(y)
(4π)n2
√
∆(x, y)P(x, y) . (3.23)
2For a detailed derivation, see e.g. Chap. 3 of [13].
15

3.1.3 Expected variance
In order to calculate the time value of a vanilla call option in the next subsection, the expectation
value of the instantaneous variance of the rate is needed with the final rate fixed at the value of the
strike, i.e.
v(τ, x,K) ≡ E[(σ1(Xτ ))2δ(X1τ −K)|X0 = x] =
∫
dny[σ1(y)]2δ(y1 −K)p(τ ;x, y) . (3.24)
The expression is for a general n-factor model where the first coordinate is the relevant interest rate,
i.e. x1 = f .
For the local volatility model in Eq. (2.8), i.e. for n = 1, Eq. (3.24) reduces to an algebraic one,
v(τ, f,K) = σ2C(K)2p(τ, f,K) = τ−12 σ2C(K)2A(f,K)e−
B(f,K)2τ
∞∑
k=0
ak(f,K)τk . (3.25)
Thus, the asymptotic expansion for the expected variance in the local volatility model is given by
the same coefficients as for the transition density with an extra prefactor.
For the two-factor SABR model in Eq. (1.10), a one-dimensional integral remains to be carried
out,
v(τ ; f, α;K) = C(K)2∞∑
k=0
τk−1
∫
α′2A(f, α;K,α′)e−B(f,α;K,α′)
2τ ak(f, α;K,α′)dα′ , (3.26)
where we have used the heat-kernel expansion of the transition density in Eq. (3.22). The integrands
in Eq. (3.26) are of the form f(α′)eg(α′)/τ where τ is a small parameter. The integral is then
dominated by the behavior of f and g in the vicinity of the minimum α of g(α′). It can be expanded
in an asymptotic series using a saddle-point expansion (Laplace method, a short summary is given
in App. A) resulting in
v(τ ; f, α;K) = A(f, α;K)τ−12 e−
B(f,α;K)2τ
∞∑
k=0
bk(f, α;K)τk , (3.27)
with b0 = 1,
B(f, α;K) = minα′
B(f, α;K,α′) = B(f, α;K, α) , (3.28)
as well as
A(f, α;K) =
√
4π
B′′(f, α;K, α)α2C2(K)A(f, α;K, α) . (3.29)
Here, primes denote derivatives with respect to α′ evaluated at the position α of the minimum. The
first correction term is given by the following rather cumbersome expression,
b1 = a1 +1
B′′
(2A′
A+
2
α2+
A′′
A
)
− 1
(B′′)2
(2B′′′
α+
A′B′′′
A+
B(4)
4
)
+5
12
(B′′′)2
(B′′)3. (3.30)
For brevity, we have omitted the arguments of the two-point functions which should be clear from
the context and by comparison with Eq. (3.29).
16

For comparison with Monte Carlo simulations, it will prove useful to derive a similar expression
for the marginal transition density of the SABR model
pm(τ, f, α;F ) =
∫
dα′p(τ ; f, α, F, α′) . (3.31)
We can again use Laplace’s method to obtain the following asymptotic expansion,
pm(τ ; f, α;F ) = A(f, α;F )τ−12 e−
B(f,α;F )2τ
∞∑
k=0
bk(f, α;F )τk , (3.32)
with
A(f, α;F ) =
√
4π
B′′(f, α;F, α)A(f, α;F, α) , (3.33)
b0 = 1 and
b1 = a1 +A′′
AB′′ −1
(B′′)2
(A′B′′′
A+
B(4)
4
)
+5(B′′′)2
12(B′′)3. (3.34)
Summarizing this subsection, we have derived an asymptotic expansion for the expected variance
which for both the local volatility model as well as the SABR model is of the form,
v(τ ;x;K) = A(x,K)τ−12 e−
B(x,K)2τ
∞∑
k=0
bk(x,K)τk , (3.35)
as well as a similar expansion for the marginal transition density of the form,
pm(τ ;x;K) = A(x,K)τ−12 e−
B(x,K)2τ
∞∑
k=0
bk(x,K)τk . (3.36)
Note that the ratio of the expressions in Eqs. (3.35) and (3.36) has a leading order expansion where
a lot of factors cancel out. For the SABR model, we obtain
v(τ ;x;K)
pm(τ ;x;K)= α2C2(K)
[
1 +
{1
B′′
(2A′
A+
2
α2
)
− 2B′′′
(B′′)2
}
τ + O(τ2)
]
. (3.37)
This ratio is just the local volatility as we will see in the next section.
3.1.4 Time value of vanilla option
The (normalized) value of a vanilla European call option is given by
C(τ, x,K) = E[(X1τ −K)+|X0 = x] =
∫
dy1(y1 −K)+pm(τ, x, y1)
= (x1 −K)+ +
∫ τ
0
dτ ′∫
dy1(y1 −K)+∂τ ′pm(τ ′, x, y1) , (3.38)
where pm is the marginal transition density defined in Eq. (3.31). Now integrating the Kolmogorov
forward Eq. (2.14) over y2 to yn, one obtains
∂τpm(τ, x,K) =1
2∂2K
∫
dny[σ(1)(y)]2δ(y1 −K)p(τ, x, y) . (3.39)
17

Other terms in the Kolmogorov forward equation vanish after integration since the transition density
is sufficiently strongly suppressed at infinity. Eq. (3.39) can also be expressed as
∂τpm(τ, x,K) =1
2∂2K
[K2σ2
loc(x,K)pm(τ, x,K)], (3.40)
where Dupire’s local volatility σloc can be obtained from the expected variance by normalizing with
the marginal transition density,
K2σ2loc(x,K) =
v(τ, x,K)
pm(τ, x,K)=
E[σ2(Xτ ′)δ(Xτ ′ −K)|X0 = x]
pm(τ, x,K). (3.41)
Using Eq. (3.39) in Eq. (3.38) and integrating twice by parts, one obtains
C(τ, x,K) = (x1 −K)+ +1
2
∫ τ
0
E[σ2(Xτ ′)δ(Xτ ′ −K)|X0 = x]dτ ′ . (3.42)
The expectation value has been calculated in Eq. (3.35) as an asymptotic series for small τ . To
obtain a similar series for the option value itself, we need to evaluate the following time integrals,
Ik(x, s) =
∫ s
0
uk− 12 e−
x2u du . (3.43)
Integration by parts yields the recursion relation,
Ik(x, s) =sk+
12
k + 12
e−x2s − x
2(k + 12 )
Ik−1(x, s) . (3.44)
For k = −1, the integral can be reduced to a Gaussian one by variable transformation such that
I−1 =
√
8π
xN
(
−√
x
s
)
=
√
2π
xerfc
(√x
2s
)
. (3.45)
Here, N(x) is the cumulative normal distribution function and erfc is the closely related complemen-
tary error function. Thus, all integrals Ik can be reduced to elementary functions and the cumulative
normal distribution function. Now, to obtain an asymptotic expansion for the option value, we can
use results for the asymptotic behaviour of the complementary error function at large arguments.
Alternatively, we can apply the recursion relations backwards ad infinitum, and obtain
Ik(x, s) =2sk+
32
xe−
x2s − 2k + 3
xIk+1(x, s)
=2sk+
32
xe−
x2s
[
1 − s
x(2k + 3) +
(2k + 3)(2k + 5)
x2Ik+2(x, s)
]
= . . .
=2sk+
32
x
[
1 +
∞∑
l=1
(2k + 3) . . . (2(k + l) + 1)(
− s
x
)l]
. (3.46)
Putting things together and sorting by orders of τ , we finally obtain the following asymptotic series
for the option value,
C(τ, x,K) = (x1 −K)+ +A(x,K)
B(x,K)τ
32 e−
B(x,K)2τ
∞∑
k=0
ck(x,K)τk , (3.47)
with
ck(x,K) = bk(x,K) +
k−1∑
l=0
(2l + 3) . . . (2k + 1)
(−B)k−lbl(x,K) . (3.48)
18

3.1.5 Implied volatility
In order to find the log-normal implied volatility, we need to match the option price in the full model
with the one obtained in the Black model. This is done by writing down the asymptotic expansion
for the time value in the Black model. Since this is a special case of the general local-volatility model
treated in Sec. 3.2 with C(f) = f , we will simply state the result here and postpone the details of
the calculation,
CB − (f −K)+ =
√
fK(σ2τ)3
2π ln4 Kf
e−ln2 K
f
2σ2τ
(
1 − σ2τ
[1
8+ 3 ln−2 K
f
]
+ O(τ2)
)
. (3.49)
Assuming that the implied volatility σimpl. has a regular expansion in τ ,
σimpl. = σ0 + σ1τ + σ2τ2 + O(τ3) , (3.50)
we can take logarithms on both sides of the identity CB = C and thoroughly expand in powers of
τ . The coefficients must match on both sides. The leading order ∼ τ−1 yields
σ0(x,K) =| ln K
f0|
√
B(x,K)=
√2| ln K
f0|
dmin(x,K), (3.51)
whereas the constant terms (zeroth order in τ) result in
σ1
σ0=
1
Bln
(1
σ0
√2π
KfA
)
, (3.52)
and the terms proportional to τ yield
σ2
σ0=
3
2
(σ1
σ0
)2
+1
B
(
c1 − 3σ1
σ0+ σ2
0
[
1
8+
3
ln2 Kf
])
. (3.53)
In summary, we have shown in this section, how the heat-kernel expansion in Eq. (3.15) can be
used to obtain an expansion for the Black implied volatility. Coefficients in this latter expansion are
algebraic combinations of coefficients of the former expansion and some derivatives with respect to α
thereof. The remaining task is to derive explicit analytical expressions for the quantities of the heat-
kernel expansion in Eq. (3.15), namely the geodesic distance, the van-Vleck-Morette determinant,
the parallel transport integral and wherever tractable the first correction term a1.
3.2 Application to local volatility model
Let us now apply the formalism presented in the previous section to the simple case of the local-
volatility model in Eq. (2.8), i.e. n = 1 and σ1 = σC(f). We will assume C(f) to be sufficiently
smooth for the derivations here. In Sec. 7.1.3, we will comment on problems that arise from the
non-analytic nature of the C(f) at regime switching points. Approximate expressions for the implied
volatility for the local volatility model have been obtained early on by Hagan and Woodward using
19

singular-perturbation theory [29]. Mathematically rigorous results, in particular an exact expres-
sion for the implied volatility in the limit τ → 0 have been derived by Berestycki et al. using a
PDE approach directly for the implied volatility [8]. Gatheral provides a thorough review of the
existing literature and accurate results for time-inhomogeneous local-volatility problems [25]. The
presentation in the current section is very much along the lines of the recent paper by Taylor [55].
The metric tensor for the local-volatility model only has a single component g11 = σ2C2(f)/2,
thus g11 = 2/σ2C2(f) and√
g(f) =√
2/σC(f). According to Eq. (3.9), the Abelian connection is
given by
A1(f) = −σ2
4C(f)C′(f) , ⇒ A1(f) = −1
2
C′(f)
C(f). (3.54)
There is only a single Christoffel symbol given by
Γ111 = −C′(f)
C(f). (3.55)
A geodesic connecting f to F is trivially given by the interval [f, F ] parametrized by the geodesic
distance
d(f, F ) =
∣∣∣∣∣
∫ F
f
√
g11(φ)dφ
∣∣∣∣∣
=√
2
∣∣∣∣∣
∫ F
f
dφ
σC(φ)
∣∣∣∣∣
=
√2
σ|Σ(F ) − Σ(f)| . (3.56)
Following the notation in [26], we have defined the Σ-function
Σ(f) =
∫ f dφ
C(φ), (3.57)
where the constant of integration can be chosen arbitrarily. As this quantity will be needed in
various contexts, we have compiled the analytical expressions for all the relevant C(f) in App. B.
Taking derivatives of Eq. (3.56), it follows that
− ∂2
∂f∂F
[1
2d2(f, F )
]
=2
σ2C(f)C(F ), (3.58)
and thus the van-Vleck-Morette determinant is given by ∆(f, F ) = 1. The parallel transport integral
can easily be calculated,
∫
C(f,F )
A1(φ)dφ = −1
2
∫ F
f
C′(φ)
C(φ)dφ = −1
2ln
(C(F )
C(f)
)
, (3.59)
and the Abelian factor in the parallel transport operator is thus given by
P(f, F ) =
√
C(f)
C(F ). (3.60)
Finally assembling the pieces, the heat-kernel expansion for the transition density reads as
p(τ ; f, F ) =
√
C(f)
2πσ2τC3(F )e−
12σ2τ
|Σ(F )−Σ(f)|2∞∑
k=0
ak(f, F )τk , (3.61)
20

with a0 = 1. The recursion relation for the heat-kernel coefficients in Eq. (3.16) simplifies in one
dimension,
ak+1(f, F ) =σ2
2[Σ(F ) − Σ(f)]k+1
∫ F
f
[Σ(F ) − Σ(φ)]k√
C(φ)∂2φ[√
C(φ)ak(φ, F )]dφ . (3.62)
With a0 = 1, the first correction term explicitly reads as
a1(f, F ) =σ2
4[Σ(F ) − Σ(f)]
∫ F
f
dφ
{
C′′(φ) − [C′(φ)]2
2C(φ)
}
= σ2C′(F ) − C′(f) − 1
2 [Σ(F ) − Σ(f)]
4[Σ(F ) − Σ(f)], (3.63)
where we have defined
Σ(f) =
∫ f [C′(φ)]2
C(φ)dφ , (3.64)
with a still arbitrary constant of integration. For a local volatility model, the integral in Eq. (3.27)
reduces to an algebraic expression and bk = ak. The time value of a vanilla call option is then
explicitly given by the following asymptotic expansion,
C(τ, f,K) = (f −K)+ +
√
C(f)C(K)(σ2τ)3
2π|Σ(K) − Σ(f)|4 e− 1
2σ2τ[Σ(K)−Σ(f)]2
∞∑
k=0
ck(f,K)τk , (3.65)
where
ck(f,K) = ak(f,K) +
k−1∑
l=0
(2l + 3)(2l + 5) . . . (2k + 1)
[−(Σ(K) − Σ(f))2/σ2]k−lal(f,K) . (3.66)
For the first coefficients, this equation yields,
c0(f,K) = 1 , (3.67)
c1(f,K) = a1(f,K) − 3σ2
[Σ(K) − Σ(f)]2, (3.68)
c2(f,K) = a2(f,K) − 5σ2
[Σ(K) − Σ(f)]2a1(f,K) +
15σ4
[Σ(K) − Σ(f)]4. (3.69)
The leading term in the implied volatility is given by
σ0(f,K) = σln K
f
Σ(K) − Σ(f). (3.70)
Note, that σ on the right hand side is the prefactor of C(f) in the local volatility model, not to be
confused with the Black volatility. Eq. (3.70) can also be written as
∫ K
f
dφ
σ0(f,K)φ=
∫ K
f
dφ
σC(φ), (3.71)
giving a precise notion of how the local volatility C(f) has to be ’harmonically averaged’ to obtain
the (leading order) implied volatility σ0 [8]. The first and second order correction terms are explicitly
given by
σ1
σ0=
σ2
2∆Σ2ln
[
∆Σ2
ln2 Kf
C(K)C(f)
Kf
]
, (3.72)
21

and
σ2
σ0=
σ4
(∆Σ)4
{
1
8ln2 K
f− 3
2ln
[
(∆Σ)2
ln2 Kf
C(K)C(f)
Kf
]
+3
8ln2
[
(∆Σ)2
ln2 Kf
C(K)C(f)
Kf
]}
+σ4
4(∆Σ)3
{
C′(K) − C′(f) − 1
2∆Σ
}
, (3.73)
where we have used the shorthands ∆Σ = Σ(K) − Σ(f) and ∆Σ = Σ(K) − Σ(f).
3.3 Application to SABR model
Let us now tackle the heat-kernel expansion of the main model of interest, namely the extended
SABR model in Eq. (1.10).
3.3.1 Geodesic distance: Hyperbolic geometry
For notational convenience, we follow [46] and set ν = 1 for most of the following calculations. This
amounts to working with a dimensionless time ν2τ → τ . To recover all factors of ν, we need to
perform the following replacements at the end of the calculation,
τ → ν2τ , α → α
ν, σimpl. → νσimpl. . (3.74)
With this choice of variables, the inverse metric reads as
(gij) =1
2α2
(C2(f) ρC(f)ρC(f) 1
)
. (3.75)
Performing a matrix inversion, we obtain
(gij) =2
α2C2(f)(1 − ρ2)
(1 −ρC(f)
−ρC(f) C2(f)
)
. (3.76)
The metric can be diagonalized by the following coordinate transformation,
x =q − ρα√
1 − ρ2,
y = α , (3.77)
where q =∫ f du
C(u) with a still arbitrary lower integration bound. The Jacobian of the transformation
is given by
Λ =∂(x, y)
∂(f, α)=
(1
C(f)√
1−ρ2− ρ√
1−ρ2
0 1
)
, (3.78)
such that the components of the transformed metric become,
(gij) → Λ(gij)ΛT =1
2y2(
1 00 1
)
, (3.79)
as well as,
(gij) →2
y2
(1 00 1
)
. (3.80)
22

Thus, the line element can formally be written as,
ds2 =2
y2(dx2 + dy2) . (3.81)
The transformed metric is that of the Poincare upper half plane (y > 0) which is a model of
hyperbolic geometry. The transformed metric is of the form gij(x) = γ(x)δij for which Christoffel’s
symbol read as,
Γijk =
1
2γ[δik∂jγ + δij∂kγ − δjk∂iγ] . (3.82)
Here, we have γ = 2y2 , and thus,
Γ111 = Γ1
22 = Γ212 = Γ2
21 = 0 , Γ112 = Γ1
21 = Γ222 = −Γ2
11 = −1
y. (3.83)
The ODE for the geodesic in Eq. (3.18) thus explicitly reads as,
x− 2
yxy = 0 ,
y +1
y(x2 − y2) = 0 . (3.84)
It can further be simplified by using complex coordinates z = x + iy,
z + iz2
Im(z)= 0 . (3.85)
The geodesics for the Poincare half-plane model are known to be half-circles centered on the real
axis. Using the angle φ to the real x axis as a parameter, we thus have z(φ) = x0 + reiφ. However,
in order to construct a solution of Eq. (3.85), we need to use the arc length instead of the angle as
a parameter. The length of a geodesic between the angles φ1 and φ2 is given by,
s =
∫ φ2
φ1
dφ
√
2
Im2(z(φ))
dz
dφ
dz
dφ=
√2
∫ φ2
φ1
dφ
sinφ=
√2 log[tan(φ/2)]|φ2
φ1. (3.86)
Inverting this expression to obtain φ in terms of s, we obtain a solution to Eq.(3.85),
z(s) = x(s) + iy(s) = x0 + re2i arctan(es/
√2) = x0 − r +
2r
1 − ies/√2. (3.87)
Alternatively, in terms of real coordinates, we have
(x(s)y(s)
)
=
(
x0 − r tanh(s/√
2)r
cosh(s/√2)
)
. (3.88)
Eq. (3.87) is easily verified to provide indeed a solution of Eq. (3.85), using
z = −√
2ires/√2
(1 − ies/√2)2
, z = − ires/√2(1 + ies/
√2)
(1 − ies/√2)3
. (3.89)
Given two points (x1, y1) and (x2, y2) on a geodesic, its radius r and its center x0 are determined
by algebraic equations,
r2 = (x1 − x0)2 + y21 = (x2 − x0)2 + y22 , (3.90)
23

with the explicit solutions
x0 =y22 − y21 + x2
2 − x21
2(x2 − x1), (3.91)
and
r2 =(y21 − y22)2
4(x1 − x2)2+
(x1 − x2)2
4+
y21 + y222
. (3.92)
Given x0 and r, the position s on the geodesic can be obtained by inverting Eq. (3.87). After some
lengthy but straightforward algebra, the geodesic distance |s1 − s2| between two points (x1, y1) and
(x2, y2) can be cast in the form
d =√
2acosh
(
1 +(x1 − x2)2 + (y1 − y2)2
2y1y2
)
, (3.93)
Substituting the coordinate transformation of Eq. (3.77) into Eq. (3.93), the geodesic distance
in the original variables is given by
d =√
2acosh
(
1 +(q1 − q2)2 + (α1 − α2)2 + 2ρ(q1 − q2)(α1 − α2)
2α1α2(1 − ρ2)
)
. (3.94)
With (f1, α1) = (f, α) and (f2, α2) = (K,α′), the minimum of d with respect to α′ occurs at
α =√
α2 + q2 + 2ρqα , (3.95)
where q = q2 − q1 =∫K
fdf
C(f) = Σ(K) − Σ(f) ≡ ∆Σ.
3.3.2 van-Vleck-Morette determinant
For the Poincare half plane, the van-Vleck-Morette determinant can be expressed in terms of the
geodesic distance,
∆(x, y) =d(x, y)√
2 sinh(d(x, y)/√
2). (3.96)
This can be verified by explicitly differentiating Eq. (3.93) according to the definition in Eq. (3.20).
3.3.3 Parallel transport
Carrying out the differentiation in Eq. (3.9) explicitly, the Abelian connection is given by
(Ai) = (−1
2g−
12 ∂j(g
12 gij)) = −1
4α2C(f)C′(f)
(10
)
, (3.97)
resulting in
(Ai) = (gijAj) =
C′(f)
2C(f)(1 − ρ2)
(−1
ρC(f)
)
. (3.98)
Thus the integral in the scalar factor of the parallel transport operator reads as∫
CAidx
i = − 1
2(1 − ρ2)
∫
C
C′(f)
C(f)df +
ρ
2(1 − ρ2)
∫
CC′(f)dα . (3.99)
The first integral is over an exact form, thus independent of the path, and can be easily carried out.
We obtain,
P(f, α;F, α) = e∫
C Aidxi
=
(C(f)
C(F )
) 12(1−ρ2)
eρ
2(1−ρ2)M
, (3.100)
24

where
M =
∫
CC′(f)dα , (3.101)
denotes the remaining path dependent term that needs to be calculated depending on the particular
realization of C(f).
3.3.3.1 Numerical quadrature for M
The remaining integral in Eq. (3.101) is a line integral along a geodesic. Using the angle φ to the x
axis in the x-y-plane as a parameter, the integral can be expressed as follows,
M =
∫ φ2
φ1
C′(Σ−1(ρx0 + r[ρ cosφ + ρ sinφ]))r cosφdφ . (3.102)
For all models considered here, the derivative C′(f), as well as the function Σ(f) and can be
calculated analytically (see App. B. The integral for M can then easily be carried out by numerical
quadrature. For special cases, it can also be performed analytically, as shown in the next two
subsections.
3.3.3.2 Standard SABR model
For the standard CEV-based SABR model, we have C(f) = fβ. With
Σ(f) =f1−β
1 − β, Σ−1(q) = [(1 − β)q]
11−β , C′(Σ−1(q)) =
β
1 − β
1
q, (3.103)
the integral for M reduces to
M =β
1 − β
∫ φ2
φ1
r cosφ
ρx0 + r[ρ cosφ + ρ sinφ]dφ . (3.104)
The integrand is a rational function of sinφ and cosφ. The Weierstrass substitution
t = tanφ
2, dφ =
2dt
1 + t2, sinφ =
2t
1 + t2, cosφ =
1 − t2
1 + t2, (3.105)
then reduces it to an integral over a rational function of t which can be carried out by partial
fractions. After some algebra, we obtain
M = G(t1) −G(t2) , (3.106)
with
G(t) =β
1 − β
r sgn(x0 − r)√
r2 − ρ2x20
∑
s=±
s
1 + t2s
{t2s ln(t− ts) + πts atan(t−1) − ln(1 + t2)
}, (3.107)
and the roots t± of some characteristic polynomial,
t± = − rρ
ρ(x0 − r)±√
r2 − ρ2x20
ρ2(x0 − r)2. (3.108)
Note that in Eq. (3.107), we have kept a potentially complex root and a complex logarithm to avoid
some case distinctions.
25

f
α
x
y
Figure 3.1: Visualization of the geodesics of the three regime model in the f -α plane (left panel)as well as the x-y standard Poincare hyperbolic plane. In the x-y plane, geodesics are half circlescentered on the x axis. The coordinate transformation effective between the left and right panels isgiven in Eq. (3.77), where q = Σ(f) and Σ(f) for the three regime model is given in Eq. (B.6).
3.3.3.3 Three-regime model
For the three-regime model with C(f) in Eq. (1.12), the path dependent integral in Eq. (3.101) has
a clear geometric interpretation. As C′(f) is piecewise constant it can be taken out of the integral,
M =
∫
CL
dα + κ
∫
CR
dα = ML + κMR . (3.109)
Here, CL and CR are the intersections of the relevant geodesic C with the regime f ≤ yL or f ≥ yR,
respectively. Thus ML and MR are the length of the projection of this intersection to the α-
axis. Fig. 3.1 shows a visualization of the geodesics and the regimes in the f -α as well as the x-y
plane. Note that y = α, and thus the length of the projection does not change under the variable
transformation. The calculation of the intersections can thus be done in the x-y plane by elementary
geometry.
3.3.4 Transition density
We are now ready to write down the leading asymptotic expansion for the transition density of the
extended SABR model. Assembling all contributions and reinstating the factors of ν, Eq. (3.15)
26

becomes
p(τ ; f, α;F,A) =1
2πC(F )A2τ
√
d/√
2
sinh(d/√
2)
(C(f)
C(F )
) 12(1−ρ2)
× exp
[
− d2
4ν2τ+
ρ
2ν(1 − ρ2)M(
f,α
ν;F,
A
ν
)]
×∞∑
k=0
ak(f, α;F,A)(ν2τ)k , (3.110)
where the geodesic distance in the original variables is given by
d(f, α;F,A) =√
2acosh
(
1 +ν2(∆Σ)2 + (A− α)2 + 2ρν(∆Σ)(A− α)
2αA(1 − ρ2)
)
, (3.111)
and M is calculated in Secs. 3.3.3.1 to Secs. 3.3.3.3 for all relevant choices of C(f). Formally, we
have written an infinite series in Eq. (3.110), but we will only obtain the very leading order a0 = 1
in this thesis.
3.3.5 Marginal transition density and local volatility
The asymptotic expansion of the marginal transition density in Eq. (3.32) can now be explicitly
computed. There are some surprising cancellations between A(f, α,K, α) and B′′ and we obtain
pm(f, α;K) =
√α
2πα3τC2(K)
(C(f)
C(K)
) 12(1−ρ2)
× exp
(
− d2min
4ν2τ+
ρ
2(1 − ρ2)M(
f,α
ν;K,
α
ν
))
×∞∑
k=0
bk(f, α;K) , (3.112)
where again, we will only work with the leading term b0 = 1 in the following. The minimum dmin of
the geodesic distance occurs at
α =√
α2 + ν2(∆Σ)2 + 2ρνα∆Σ , (3.113)
and is given by
dmin =√
2acosh
(α− ρν∆Σ − ρ2α
α(1 − ρ2)
)
=√
2
∣∣∣∣ln
(α− ν∆Σ − ρα
α(1 − ρ)
)∣∣∣∣. (3.114)
Finally, for the Dupire local volatility given in Eq. (3.41) the regular expansion of σloc in powers of
τ given in Eq. (3.37) can be evaluated explicitly by carrying out all required derivatives. We obtain,
K2σ2loc(τ,K) = α2C2(K)
{
1 +α
2α
sinh(dmin/√
2)
dmin/√
2[ρα2C′(K) + 4ν(1 − ρ2)(2 − α)]τ
}
. (3.115)
The leading time-independent order can be expressed as an effective C-function σCeff(K) = Kσloc(K)
with
σCeff(K) = αC(K) =√
α2 + ν2(∆Σ)2 + 2ρνα∆ΣC(K) . (3.116)
27

3.3.6 Implied volatility
We can now specialize the results of Sec. 3.1.5 for the Black implied volatility to the case of the
(extended) SABR model. The leading contribution with all factors of ν is given by
σ0 =ν| ln K
f |∣∣∣ln(
α−ν∆Σ−ραα(1−ρ)
)∣∣∣
, (3.117)
where the position α of the minimum is given in Eq. (3.113). Note that for ρ = 0 and taking the
limit ν → 0 the expression in Eq. (3.117) reduces to Eq. (3.70) for the local volatility model as
expected. To show this, we use acosh(1 + x) =√
2x[1 + O(x)]. For the first correction term, we
obtain
σ1
σ0=
2
d2min
ln
d2min
2 ln2 Kf
αα
ν2C
1−2ρ2
1−ρ2 (K)C1
1−ρ2 (f)
Kf
+ρ
ν(1 − ρ2)M(
f,α
ν;K,
α
ν
)
. (3.118)
We do not give a second order correction here, as for a general C(f) the algebra becomes very
involved and it is not clear whether the recursion relation for a1 in the heat-kernel expansion can
be evaluated analytically. For the standard SABR model, the calculation has been carried out by
Paulot [46], but some parts of the integrals had to be done by numerical quadrature.
28

Chapter 4
Small correlation ρ
In the early days of option valuation with stochastic volatility, it has been noted by Hull and White
[34] that the limit of vanishing correlation ρ = 0 provides some technical simplification and new
insights. Here, ρ denotes the correlation between the driving Brownian motions W(1)t and W
(2)t of
the asset and the volatility process. In the limit ρ = 0, the valuation of a European option can be
performed in two steps. First, the option value is calculated for a deterministic but time-dependent
volatility α(t). It turns out that for a large class of processes the option value only depends on the
mean variance and not on the details of how volatility is delivered over time. Second, an average
over volatility paths is performed which reduces to an average over realized mean variance.
Hull and White [34] perform this second step analytically by expanding the option value in
the time-inhomogeneous model around the mean realized variance. The first two terms of the
expansion already provide a good approximation for small times to maturity. We will consider this
approximation here for the extended SABR model with an arbitrary local vol factor C(f). Valuation
in the time-inhomogeneous model and the calculation of time derivatives of the option value has to
be performed numerically by finite-difference or tree methods.
For larger times to maturity the Hull and White expansion [34] quickly fails as the volatility
distribution becomes less localized. The required average can still be carried out numerically, per-
forming the integral over the density of the distribution by numerical quadrature. As the density
is not easily available in closed analytic form, we will follow Rebonato and Barjaktarevic [48] and
replace the averaging by a finite sum of terms placed at evenly spaced quantiles of the volatility
distribution. These quantiles can be precalculated by a Monte Carlo simulation.
In the particular case of an underlying that follows a normal or log-normal dynamics, i.e. β = 0
or β = 1 in the standard SABR model, conditioning on volatility paths can still be fruitful even for
ρ 6= 0. The option value with deterministic time-dependent volatility still depends on the realized
r.m.s. volatility but now the spot price has to be corrected by a term that depends on a time
integral of the volatility. Therefore, the joint distribution of this correction together with the r.m.s.
volatility has to be taken into account. A review of these so-called mixing solutions is giving in the
29

book by Lewis [40]. Unfortunately, for general C(f) the correction term for the spot price cannot be
dis-entangled from the dynamics of the underlying. Recently, Antonelli and Scarlatti [3] have used
ideas similar to mixing solutions to perform a power-series expansion in ρ of the option value in a
stochastic volalitity model.
This chapter exposes the ideas involved in the ρ = 0 limit in the following logical order. In
Sec. 4.1, we look at a time-inhomogeneous local volatility model and show that, as long as it does
not contain a drift term, the time dependence of α(t) can be absorbed in a rescaling of the time
variable. The option value then only depends on the total variance v = α2τ where τ = T − t is the
time to maturity and α is the root-mean-square realized volatility. In Sec. 4.2, we use the Tower
Law to express the option value of the full model as an average of option values in the associated
time-inhomogeneous local-volatility model over realized volatility paths α(t). As the option value
in the local-volatility model only depends on the r.m.s volatility α or alternatively on total variance
v, the average over volatility paths reduces to an simple one-dimensional integral, provided the
probability density of the mean variance is known. Sec. 4.3 shows how the mean variance is related
to the exponential integral of Brownian motion and reviews some relevant results in the literature
on its distribution. The Hull and White expansion around the expectation of the mean variance is
derived in Sec. 4.4. We also discuss, how a single run of an appropriate binomial tree or a finite
difference scheme can be used to obtain the option value in the local volatility model and the required
derivatives with respect to total variance v, where it is important to note that the variance v acts
as a dimensionless time. Sec. 4.5 presents a numerical averaging scheme over the distribution of
r.m.s. volatilities. To this end, the distribution of rms volatilities α can be represented numerically
by quantiles pre-computed using Monte Carlo. Monte Carlo simulation for the quantiles is rather
time consuming. However by dimensional analysis only quantiles for the normalized process with
α0 = 1 and ν = 1 have to be calculated as a function of dimensionless time ν2τ . Furthermore,
these quantiles only depend on the volatility process and can be used for any C(f) in subsequent
averaging. We show again that a single run of a binomial tree or a finite difference scheme is sufficient
to obtain the time-dependence of the option value in the local volatility model. Some care has to be
taken to obtain accurate results for very small and very large times. Finally in Sec. 4.6, we discuss
a combination of the mixing scheme with the heat-kernel expansion to obtain results for ρ 6= 0 using
a simple contravariate correction proposed by Barjaktarevich and Rebonato [48].
4.1 Time-inhomogeneous local volatility model
Let us consider a time-inhomogeneous extension of the local volatility model in Eq. (2.8). The
relevant interest rate then follows the SDE,
dFt = α(t)C(Ft)dWt , (4.1)
30

where α(t) is a deterministic function of time. The Kolmogorov backward equation for the value of
a European option in this model reads as
∂tVLV(t, T, f) = −1
2α2(t)C2(f)∂2
fVLV(t, T, f) . (4.2)
The subscript ’LV’ stands for local volatility as apposed to ’SV’ for the option value in the full
stochastic volatility SABR model in the next section. The explicit dependence of the pricing equation
on the function α(t) can be eliminated by performing a change of variables from time t to the total
variance in the time interval (t, T ),
v(t, T ) =
∫ T
t
α2(t′)dt′ ≡ α2(t, T )(T − t) . (4.3)
Here α(t, T ) is the root-mean-square (r.m.s.) volatility between the time t and maturity T . Note
that v(t, T ) acts as a dimensionless time. We denote by VLV(v, f) the option value as a function of
the total variance, i.e. VLV(t, T, f) = V (t(v), T, f) ≡ VLV(v, f) = VLV(v(t), f). In terms of the total
variance, the Kolmogorov backward equation now reads as
∂vVLV(v, f) =1
2C2(f)∂2
f VLV(v, f) , (4.4)
with the initial condition VLV(0, f) = VLV(T, T, f) = g(f), where g(f) is the payoff of the option,
e.g. g(f) = (f −K)+ for a European call. The time-inhomogeneity has disappeared from Eq. (4.4).
Thus, the option value can only depend on the total variance v(t, T ) to maturity,
VLV(t, T, f) = VLV(v(t, T ), f) = VLV(α2(t, T )(T − t), f) . (4.5)
Similar arguments could be used to show that the terminal distribution of FT in the time-inhomo-
geneous local vol model only depends on the total variance v(t, T ) and not on how the volatility α(t)
is delivered along the path.
Note that the argument in this section requires the absence of a drift term in Eq. (4.1). Otherwise,
a time change would only shift the explicit time dependence from the diffusion to the drift term.
4.2 Conditioning on volatility path
Using the Tower Law to condition on the realized volatility path, the value of a European option in
the (extended) SABR stochastic volatility model for ρ = 0 can be expressed as
VSV(t, f, α) = E[g(FT )|Ft = f, αt = α]
= E[E[g(FT )|Ft = f, αt′ = α(t′), t ≤ t′ ≤ T ]|αt = α]
= E[VLV (v(t, T ), f)|αt = α]
=
∫
VLV (v, f)E[δ(v − v(t, T ))|αt = α]dv
=
∫
VLV (v, f)π(v; τ, α, ν)dv . (4.6)
31

The second line contains the conditioning on the volatility path. The third line uses the fact that,
as shown in the previous subsection, the option value in the local volatility model does not depend
on the details of the volatility α(t) along the path, but only on the total variance v(t, T ). Thus, the
average over realized volatility paths reduces to an average over total variance which is written as
an integral over its probability density π(v; τ, α, ν) in the last line of Eq. (4.6).
Note that VLV (v, f) is simply the option value for the time-homogeneous local volatility model
in Eq.(2.8) with σ = 1. In some cases as for the CEV model, it is known analytically. In all other
cases, we can use a finite-difference scheme as described in Sec. 6.1.1 to solve for the option value.
The averaging in Eq. (4.6) involves option values for the same strike and initial value of the rate f
but for different dimensionless times v. This can be obtained from intermediate results of a single
run of the finite-difference scheme. The distribution of total variance has quite fat tails such that the
option values needed in the averaging are up to quite large dimensionless times. In order not to loose
accuracy for small times where the main probability weight of π is concentrated, a non-uniform grid
in the rate direction f is required in the finite-difference scheme. We have also experimented with
binomial trees and obtained similar results. As no real advantage of the trees over finite differences
have been noticed, we do not present results here. For computational speed, the whole shape of the
smile can be calculated at once using the Dupire forward Eq. (1.9) instead of the backwards pricing
equation. This is compatible with the averaging in Eq. (4.6).
4.3 Distribution of total variance
According to Eq. (4.6), we need to evaluate the probability density π(v; τ, α, ν) of the total variance
defined by
v =
∫ τ
0
α2tdt , (4.7)
where αt follows the stochastic process
dαt = ναtdWt , (4.8)
with the initial condition α0 = α. By dimensional analysis, it is easy to see that the probability
density only depends on the following dimensionless combination of parameters,
π(v, τ, α, ν) = π(v/α2τ, ν2τ, 1, 1) ≡ π(v/α2τ, ν2τ) . (4.9)
Thus, it is sufficient to know the distribution for the normalized process with α = ν = 1 as a function
of dimensionless time s = ν2τ . All other distributions can be obtained by rescaling. Changing the
variable of integration in Eq. (4.6) to u = v/α2τ , we obtain,
VSV (t, f, α) =
∫
VLV (uα2τ, f)π(u, ν2τ)du . (4.10)
32

The probability density π(u, s) is not readily available in analytic form. Note however that for
the normalized process (α = ν = 1) the SDE
dαs = αsdWs , (4.11)
has the well known solution,
αs = e−s2+Ws = eW
(− 12)
s , (4.12)
where W(µ)t = Wt + µt is a Brownian motion with drift µ. Thus, the total variance in the interval
(0, s) is given by∫ s
0
α2s′ds
′ =
∫ s
0
e2W(− 1
2)
s′ ds′ ≡ A(− 1
2 )s . (4.13)
Here, A(µ)s is the exponential integral of Brownian motion with drift which has been studied in
detail in the literature. A comprehensive review of available results is given by Matsumoto and Yor
[43]. Here, we simply quote some relevant results, for proofs see [43] and references therein. The
joint distribution of the Brownian motion and its exponential integral have the following integral
representation,
P(A(µ)s ∈ da,W (µ)
s ∈ dx) = eµx−µ2s2 exp
(
−1 + e2x
2a
)
θ
(ex
a, s
)dadx
a, (4.14)
where the function θ(r, s) is given by
θ(r, s) =re
π2
2s
√2π3s
∫ ∞
0
e−ξ2
2s e−r cosh(ξ) sinh(ξ) sin
(πξ
s
)
dξ . (4.15)
Thus, the probability density of A(µ)s independent of W
(µ)s has a representation in terms of a double
integral. In principle, when the option value or the probability density of the underlying local
volatility model are known, integral representations of the value of European options in the full
stochastic-volatility model can thus be derived. However, these multi-dimensional integrals do not
appear to be easily accessible numerically due to the oscillatory nature of the integrand. For s → ∞a simple asymptotic expression for the law of A
(−µ)∞ can be derived. In this case A
(−µ)∞ with µ > 0
is distributed as (2γµ)−1 where γµ is a gamma random variable with parameter µ, i.e.
P(γµ ∈ dx) =1
Γ(µ)xµ−1e−xdx . (4.16)
For the relevant case µ = 12 , it follows that
P(A(− 1
2 )∞ ∈ da) =e−
12a
√2πa3
da . (4.17)
The cumulative distribution function in this limit is thus given by
P(A(− 1
2 )∞ < a) = 2[1 −N(a−12 )] . (4.18)
33

For the distribution of normalized r.m.s. volatility, this implies an asymptotic expression for s =
ν2τ ≫ 1,
π(u, s) ∼ e−1us
√2πu3s3
. (4.19)
Combining this result with analytical expressions for the option price or the transition density in
the CEV model, the asymptotics of the SABR model for τ → ∞ and ρ = 0 can be derived [21].
In the following section, we will need the moments of the distribution of normalized total variance
defined as
M (n)(s) =
∫ ∞
0
unπ(u, s)du , (4.20)
respectively the centralized moments,
M (n)c (s) =
∫ ∞
0
(u − u(s))nπ(u, s)du , (4.21)
where u(s) = M (1)(s) is the average normalized total variance. Results for the moments are known
in the literature [34, 43]. Appendix C gives an elementary derivation of a recursion relation that can
be used to compute all moments. The result for the first few centralized moments reads as follows,
u(s) =1
s(es − 1) ,
M (2)c (s) =
1
15s2(e6s − 15e2s + 24es − 10
),
M (3)c (s) =
1
s3
(1
315e15s − 1
5e7s +
8
45e6s + 2e3s − 24
5e2s +
136
35es − 16
15
)
. (4.22)
4.4 Hull and White Expansion
For small times to maturity τ , the distribution of total variance discussed in the previous section
will be fairly localized. Hull and White [34] thus expand the value of the integrand in Eq. (4.10)
around the mean of the distribution to obtain an expansion in its moments,
VSV (τ, f, α) =
∫
VLV (uα2τ, f)π(u, ν2τ)du
=
∫ ∞∑
n=0
1
n!
∂nVLV
∂θn
∣∣∣∣∣θ=uα2τ
(θ − θ)nπ(u, ν2τ)du
=
∞∑
n=0
(α2τ)n
n!
∂nVLV
∂θn(uα2τ, f)M (n)
c (ν2τ)
= VLV (uα2τ, f) +(α2τ)2
2
∂2VLV
∂θ2(uα2τ, f)M (2)
c (ν2τ)
+(α2τ)3
6
∂3VLV
∂θ3(uα2τ, f)M (3)
c (ν2τ) + O(τ4) . (4.23)
Here, θ = uα2τ and u(s) as well as the centralized moments M(n)c (s) are defined in the previous
section.
34

When analytical formulas for the option value and its θ-derivatives for the local volatility model
are available, these can be used in Eq. (4.23) to obtain an analytical approximation for the full
SABR model for small times to maturity. For a general local vol factor C(f) however, the option
value and its derivatives can only be obtained numerically. We use a finite difference scheme as
described in Sec. 6.1 to calculate the time dependence of the option value in the the local volatility
model. Subsequently, the required time derivatives are estimated as discrete derivatives from the
last points in the time grid.
4.5 Averaging with precalculated quantiles
We will see that the Hull-White expansion only yields reasonably accurate results for the smile for
very small times to maturity and close to at-the-money. A far better approximation can be obtained
by performing the average over total variance numerically. To this end, we follow Barjaktarevich
and Rebonato [48] and replace the continuous distribution π by a finite number of delta functions,
πN (u, s) =
N∑
i=1
δ(u− ui(s)) , (4.24)
where ui(s) are evenly spaced quantiles of the distribution, i.e.
Π(ui(s), s) =
∫ ui(s)
0
π(u, s) =i− 1
2
N, (4.25)
for i = 1, . . . , N . The integral in Eq. (4.10) then reduces to a finite sum
VSV (τ, f, α) ≈N∑
i=1
VLV (ui(ν2τ)α2τ, f)du . (4.26)
The quantiles ui(s) can be precalculated using a Monte Carlo simulation. To this end, a vector
representing the squares α2s is initialized with ones and a vector Is representing the integrals over
α2s is initialized with zeros. For each time step, a vector ω of independent standard normal variables
is drawn and the following updates are performed,
α2s+∆ = α2
se−∆+2ω
√∆ ,
Is+∆ = Is +∆
2
(α2s + α2
s+∆
), (4.27)
corresponding to a trapezoidal integration rule. At each time steps, the vector Is is sorted and
normalized by the current time to determine the quantiles ui(s). Fig. 4.1 shows the result for N = 20
quantiles. The functions ui(s) as a function of the dimensionless time s are sufficiently smooth to
allow for a simple interpolation of quantiles in between precalculated times. The Monte Carlo
simulation is rather time consuming to achieve the necessary accuracy. However, this computation
has to be performed only once and can then be used for our numerical scheme for arbitrary local
vol factors C(f).
35

0,01 0,1 1 10 1000,01
0,1
1
5
s = ν2τ
u rms,
i(s)
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
Figure 4.1: Quantiles urms,i(s) =√
ui(s) of the distribution of r.m.s. volatility α. Solid lines showthe result of a Monte Carlo simulation. Dotted lines in the main figure are asymptotic quantilesobtained from Eq. (4.18). The inset shows a magnified view for small times s most relevant for theaveraging procedure for realistic parameters.
The time dependence of the option value in the local-volatility model required in Eq. (4.26) will
be calculated numerically by a finite difference scheme as explained in Sec. 4.2. As averaging points
in Eq. (4.26) tend to be concentrated at very small times while some large times are also present, it
is essential to use an adapted time grid with reduced step size at small times as well as a non-uniform
grid in the rate direction with higher concentration of points around the strike. We solve the forward
Dupire equation to obtain the whole form of the smile at once. In some more detail the numerical
procedure is as follows:
1. For a given time to maturity τ and parameter ν interpolate the precalculated quantiles to
obtain all ui(ν2τ).
2. Set up the non-uniform grids in space and time. For convenience, we use a grid in time that
contains all θi = ui(ν2τ)α2τ given by the quantiles.
3. Solve the Dupire equation for the local volatility model numerically on the chosen grid to
obtain VLV (θ, f).
36

4. While performing the time-stepping, add the current vector of option prices to a result vector
whenever a grid-point θi is reached.
5. Normalize the result vector of option prices by the number of quantiles yielding a vector of
option prices VSV for the full SABR model.
6. Interpolate the result vector to all strikes needed and numerically invert the Black formula to
obtain the implied volatility.
4.6 Extension to finite ρ
The averaging approach described so far in this chapter is only applicable for vanishing correlation
ρ = 0. In order to extend the approach to small finite ρ, Barjaktarevich and Rebonato [48] have
proposed to use a simple contravariate type of correction. The main idea is that the Hagan approx-
imation is approximate in time to maturity, but presumably captures the ρ dependence correctly
for small τ . We can use a similar approximation here for general C(f) by combining the mixing
approach with the heat-kernel method, i.e. we approximate the implied volatility in the full SABR
model as follows
σimpl.(τ, f, α,K, ν, ρ) ≈ σimpl.(τ, f, α,K, ν, 0) +
σhkimpl.(τ, f, α,K, ν, ρ) − σhk
impl.(τ, f, α,K, ν, 0) . (4.28)
Here, the first term on the right hand side is calculated by the mixing approach described in this
chapter. The last two terms are obtained from the asymptotic heat-kernel expansion of the implied
volatility as described in Chap. 3.
37

Chapter 5
Effective local volatility
Andreasen and Huge [2] have very recently extended the SABR model to what they call a ’ZABR’
model. In a more local-volatility style of approach they include a general local-volatility function
for the rate process, similar to our approach here, and additionally consider a CEV extension for
the volatility process. In contrast to our philosophy here, they take a non-parametric local-volatility
function the form of which is then calibrated to market data. They claim to obtain very fast and
flexible solutions for the implied volatility smile of their rather complex stochastic volatility model
by the following approach. First an effective local volatility is derived by a special and supposedly
simplified approach as compared to the heat-kernel methodology. They obtain the very leading
time-independent approximation of the effective local volatility. This result is then inserted into
the Dupire equation and solved numerically to obtain option values and thus the implied volatility
smile. They use a one-step fully implicit scheme is for the solution of the Dupire equation to speed
up calculations. We will not follow this extra optimization here.
As we have already derived an asymptotic result for the effective local volatility for the extended
SABR model in Eq. (3.115) and set up finite-difference solvers, we can check the accuracy of the
approach without much extra implementations. We thus take the leading order volatility as an
effective C-function as defined in Eq. (3.116), i.e.
Ceff(α, f,K) = αC(K) =√
α2 + ν2(∆Σ)2 + 2ρνα∆ΣC(K) , (5.1)
and solve the forward Dupire Eq. (2.15) by a one-dimensional finite-difference scheme,
∂τV (τ, f, α,K) =1
2C2
eff(α, f,K)∂2KV (τ, f, α,K) , (5.2)
with the initial condition V (0, f, α,K) = (f − K)+. Using a grid for K, one obtains the whole
functional form of the smile in one finite-difference run. Note that it would be interesting to include
the first time-dependent term in Eq. (3.115) for the effective local volatility to see whether this
improves the accuracy of the approach.
38

Chapter 6
Numerical methods
In this chapter, we discuss numerical methods for the solution of option-pricing problems. Ultimately,
we are interested in solutions for the original and extended SABR models, i.e. for two-factor models,
as a gauge for the accuracy of analytical approximations. As an important preliminary and also
due to its relevance to the ρ = 0 averaging scheme discussed in Chap. 4, we also analyze numerical
schemes for the one-factor local volatility model with general C(f).
6.1 Finite difference methods
6.1.1 Methods for one-factor models
A finite difference method provides an approximate solution of a PDE by discretizing the derivatives
on a fixed space and time grid. Differential operators are thus replaced by finite and usually sparse
matrices that can be handled on a computer.
Let us start out by considering a simple function f(x) of one real variable x. A discrete approxi-
mation to this function is given by a vector with components fi that represent the function at points
xi of a discrete grid. The simplest such grid would be one with uniform spacing δx = (xmax−xmin)/M
between neighboring points, i.e. xi = xmin + iδx, i = 0, . . . ,M , but non-uniform grids will also be
considered below. Grid points will always be ordered with increasing index i, i.e.
xmin = x0 < x1 < · · · < xM = xmax . (6.1)
Discrete approximations to derivatives of f(x) at the grid point xi can be obtained by Taylor
expanding the function values at neighboring grid points around xi,
fi+1 = f(xi + δxi) = f(xi) + f ′(xi)δxi +1
2f ′′(xi)δx
2i + O(δx3
i ) ,
fi = f(xi) , (6.2)
fi−1 = f(xi − δxi−1) = f(xi) − f ′(xi)δxi−1 +1
2f ′′(xi)δx
2i−1 + O(δx3
i−1) .
39

ai bi ci
f(xi) 0 1 0
f ′(xi)xi−xi−1
(xi+1−xi)(xi+1−xi−1)xi+1−2xi+xi+1
(xi+1−xi)(xi−xi−1)− xi+1−xi
(xi−xi−1)(xi+1−xi−1)
f ′′(xi)2
(xi+1−xi)(xi+1−xi−1)− 2
(xi+1−xi)(xi−xi−1)2
(xi−xi−1)(xi+1−xi−1)
ai bi ci
f(xi) 0 1 0f ′(xi)
12δx 0 − 1
2δx
f ′′(xi)1
δx2 − 2δx2
1δx2
Table 6.1: Coefficients of discrete approximations to the first two derivatives using a centered three-point stencil in a non-uniform grid (upper table) and their well-known limit for a uniform grid (lowertable).
Here, δxi = xi+1 − xi is the distance to the next grid point. Forming a linear combination of the
function values at xi and the neighboring two grid points,
aifi+1 + bifi + cifi−1 = [ai + bi + ci]f(xi) + [aiδxi − ciδxi−1]f ′(xi)
+1
2[aiδx
2i + ciδx
2i−1]f ′′(xi) + O(δx3
i , δx3i−1) , (6.3)
we see that approximations to the derivatives can be constructed by demanding that the coefficients
on the right hand side of Eq. (6.3) be one for the required derivative and zero for the other two
terms. This leads to a 3 by 3 linear system for each derivative. The solutions are shown in Tab. 6.1
together with the version for a uniform grid.
In this subsection, we are interested in the pricing problem for a local volatility model, i.e. we
need to solve a discrete version of the PDE
∂τV =1
2C2(f)∂2
fV ≡ LV , (6.4)
where V (τ, f) represents the option value for a current rate f and time to maturity τ . Note that we
have set σ = 1 here, such that V (τ, f) corresponds directly to VLV (τ, f) as needed for the mixing
scheme of Chap. 4. The initial condition V (0, f) = g(f) is given by the payoff g(f) of the European
option, e.g. g(f) = (f −K)+ for a call and g(f) = (K − f)+ for a put. To discretize Eq. (6.4), we
introduce a grid in the τ direction
0 = τ0 < τ1 < · · · < τL = τ , (6.5)
as well as a grid in the f direction
fmin = f0 < f1 < · · · < fM = fmax , (6.6)
and denote by V lm = V (τl, fm), with l = 0, . . . , L and m = 0, . . . ,M , an approximation to the option
value at the grid point specified by the indices l and m. Note that we require neither of the grids to
40

be uniform. The differential operator L can now be discretized using the prescriptions in Tab. 6.1.
This yields,
[LV ]m =1
2C2(fm)[a(2)m Vm+1 + b(2)m Vm + c(2)m Vm−1] , (6.7)
where a(2)m , b
(2)m and c
(2)m denote the coefficients of the second derivative given in the third line of
Tab. 6.1 with xi replaced by fm. For notational convenience, we have defined V−1 = VM+1 = 0.
Thus, L is tridiagonal and in matrix notation reads as
L =
b0 a0c1 b1 a1
c2 b2 a2. . .
cM−1 bM−1 aM−1
cM bM
, (6.8)
where we use the shorthand am = 12C
2(fm)a(2)m and similarly bm and cm. Note that for the coef-
ficients in the first and last row of the matrix L to be well defined for a non-uniform grid, ghost
points f−1 and fM+1 beyond the limit of the physical grid have to be defined.
To understand the role of these ghost points, a note about the proper treatment of boundary
conditions is in order here. A discrete version of Dirichlet boundary conditions would fix the option
value on the boundary at the ghost points, i.e. V (τl, f−1) = α(τl) = αl, V (τl, fM+1) = β(τl) = βl.
For α(τ) and β(τ), some approximate solution for the option value for large or small rates has to
be used and α and β can thus explicitly depend on the time τ . The discrete second derivative with
respect to the rate f on the first and last real grid point depends on the boundary value. The
prescription in Eq. (6.7) should then be modified as
LVl → LV
l + bl, (6.9)
to take care of the Dirichlet boundary condition. Here, the boundary vector bl
is given by
bl
=(c0α
l, 0, 0, . . . , 0, aMβl)T
. (6.10)
Alternatively, discrete von Neumann boundary conditions can be used which fix the first derivative
of the option value on the boundary. Using central differences to approximate the first derivative,
we have to specify ∂fV (τl, f0) = α(τl) = αl and ∂fV (τl, fM ) = β(τl) = βl on the first and last point
of the real grid. In discrete terms, the condition at the upper boundary reads as
βl = a(1)M V l
M+1 + b(1)M V l
M + c(1)M V l
M , (6.11)
where the coefficients are given in the middle row in Tab. 6.1. Eq. (6.11) can be solved for the option
value V lM+1 at the ghost point and used in the evaluation of the second derivative at xM . Proceeding
in the same way for the lower boundary results in the following modification of Eq. (6.7),
LVl → LV
l + bl. (6.12)
41

Here, L is obtained from L by modifying the first and last rows as follows while keeping all other
rows fixed,
cM → cM = cM − aMc(1)M
a(1)M
, bM → bM = bM − aMb(1)M
a(1)M
,
a0 → a0 = a0 − c0a(1)0
c(1)0
, b0 → b0 = b0 − c0b(1)0
c(1)0
.(6.13)
The boundary vector in Eq. (6.12) is given by
bl
=
(
αl c0
c(1)0
, 0, 0, . . . , 0, βl aM
a(1)M
)T
. (6.14)
A convenient discrete boundary condition which does not have an analog in the continuous case
is to fix the value of the second derivative at the boundary, i.e. ∂2fV (τl, f0) = α(τl) = αl and
∂2fV (τl, fM ) = β(τl) = βl. Using central differences for the discrete approximation of the second
derivative, the condition at the upper boundary reads as
βl = a(2)M V l
M+1 + b(2)M V l
M + c(2)M V l
M . (6.15)
Proceeding as for the von Neumann boundary conditions, this results in a modification as in
Eq. (6.12) where now L is obtained from L by simply setting the first and last rows to 0. The
boundary vector in this case reads as
bl
=
(
αl c0
c(2)0
, 0, 0, . . . , 0, βl aM
a(2)M
)T
. (6.16)
For the local volatility model in Eq. (6.4), setting the second derivative on the boundary equal to
zero effectively keeps the option value fixed at the payoff, i.e. V (τ, f0) = g(f0) and V (τ, fM ) = g(fM ).
Since for all models of interest here the lower boundary is given by f0 = 0 and C(0) = 0, this
reproduces the exact option value at f = 0. Also due to the absence of a drift and discount term in
Eq. (6.4), V (τ, f) will asymptotically stay at the value of the payoff for large f . Thus, the discrete
boundary condition with a vanishing second order derivative at both boundaries is a convenient way
to impose these asymptotics. This procedure is actually equivalent to Dirichlet boundary conditions
V (τ, 0) = g(0) and V (τ, fM ) = g(fM ) while working with a grid (f1, . . . , fM−1) where we have
dropped the first and last grid point. However, with the vanishing second order boundary condition,
the boundary vector in Eq. (6.16) vanishes and an explicit treatment of boundary terms in the
numerical procedure is not required any more. This simplified book keeping makes up for the loss of
information at two grid points and we will always use it for the numerical solution of local-volatility
models in this thesis.
Let us now come back to the discretization of the PDE of the local volatility model in Eq. (6.4)
after the digression on boundary conditions. Using forward differences for the first-order time deriva-
tive yields
∂τV → V l+1m − V l
m
δτl. (6.17)
42

Combining this with the f derivatives, we have to decide what time slice to use on the right hand
side of Eq. (6.4), l + 1 or l. Using a linear combination of the two yields the well known θ-scheme,
Vl+1 − V
l
δτl= L[θV l+1 + (1 − θ)V l] + θb
l+1+ (1 − θ)b
l. (6.18)
Here, L is supposed to be the modified matrix L according to the boundary conditions used. For
notational convenience we drop the tilde from now on. Rearranging terms yields the following linear
system of equations,
[1− δτlθL]︸ ︷︷ ︸
≡A(θ)
Vl+1 = [1 + δτl(1 − θ)L]
︸ ︷︷ ︸
≡B(θ)
Vl + b
l . (6.19)
We have spelled out the boundary vector bl = θδτlbl+1
+(1−θ)δτlbl
one last time for completeness of
the argument. For the rest of this subsection, we will drop it assuming that we work with vanishing
second-order boundary conditions. For the choice θ = 0, Eq. (6.19) yields the explicit scheme in
which the option value at the next time step Vl+1 is given in terms of the one at the previous time
step Vl by a simple matrix multiplication. The choice θ = 1 yields a purely implicit scheme that
requires the solution of the linear system AVl+1 = V
l. The solution of such a tridiagonal system
can be done very efficiently with two sweeps of Gaussian elimination and thus a computational cost
that is proportional to the matrix size M . In MATLAB, the backslash operator ’\’ can be used for
this purpose. For θ = 12 , Eq. (6.19) is called the Crank-Nicolson scheme.
The practicability of a finite-difference method is determined by its stability. Roughly, a scheme
is said to be stable when oscillatory or non-smooth components of the vector V l that are introduced
by the initial condition or small errors due to finite numerical accuracy are dampened or at least
not amplified during time stepping. Considering a small perturbation Vl → V
l + δV l at time step
l, an exact solution of Eq. (6.19) would yield a perturbation δV l+k at a later time step given by
δV l+k = CkδV l , (6.20)
where C = A−1
B. Applying a vector norm as a measure of the size of the perturbation yields
‖δV l+k‖ = ‖CkδV l‖ ≤ ‖C‖k‖δV l‖ , (6.21)
where ‖C‖ is a matrix norm compatible with the vector norm used. Eq. (6.21) shows that a sufficient
condition for the stability of a scheme is that the matrix norm ‖C‖ ≤ 1. Depending on the norm
used, different criteria for stability can be defined. For the heat equation with constant coefficients,
an eigensystem of the matrix L can be determined by a discrete Fourier transformation. This has
been used by von Neumann to determine the eigenvalues of the matrix C. If all eigenvalues are ≤ 1,
the scheme does not amplify errors and is thus stable. For this particular case, the θ-scheme is found
to be stable for θ ≥ 12 including the implicit and the Crank Nicolson schemes (for details see e.g.
[53] and references therein). The explicit scheme is only conditionally stable with a condition that
43

0 2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
y
r(y)
0 2 4 6 8 10 12 14 16 18 200
1
2
3
4
y
x
Figure 6.1: Illustration of the generation of a non-uniform grid. The upper panel shows the piece-wiselinear distance ratio function r(y). A very low value is chosen at y = 1 to obtain a concentrationpoint in the resulting grid. On the contrary, for large values of y a large distance ratio leads tocoverage of the asymptotic region with just a few grid points. The lower panel shows the generatingfunction g(x) and the non-uniform grid in the y direction resulting from a uniform one in the xdirection. Note that the axes are flipped for a better comparison with the upper panel.
requires the time step δτ to be reduced as δf2 when the step size in the rate direction is reduced
leading to very small required time steps and thus an inefficient scheme. Although strictly speaking
these results are only applicable to a PDE with constant coefficients, they are useful as a rule of
thumb more generally.
Another important consideration for a finite difference scheme is its consistency with the PDE
it is meant to approximate. This means that the finite difference operators applied to the true
solution of the continuous PDE approach the continuous derivatives as the grid-size is reduced to
zero. More or less by construction, all finite-difference schemes used here are second order consistent
in the space direction. By Taylor expansion, one can show that the θ-scheme for general choices of
θ is only first-order consistent in the time variable. Only for the special choice θ = 12 , i.e. for the
Crank-Nicholson scheme, second-order consistency is achieved. Therefore, we mainly work with the
Crank-Nicholson scheme. Under rather general conditions, it can then be shown that a consistent
and stable finite-difference scheme is also convergent.
To easily generate non-uniform grids, we follow Kluge [36] and use generating functions. A non-
44

uniform grid with points yi is then obtained from a uniform one with points xi by applying the
generating function g(x),
yi = g(xi) , (6.22)
where g(x) has to be monotonously increasing with y. For small grid spacings, the distance between
neighboring points of the non-uniform grid is given by,
δyi = yi+1 − yi = g(xi+1) − g(xi) ≈ g′(xi)δx = g′(g−1(yi))δx ≡ r(yi)δx , (6.23)
where δx is the spacing of the uniform grid and r(y) is called the distance ratio function. We would
like to externally prescribe the form of r(y) to chose the concentration of the grid in terms of the
target variable y. Solving for g(x) leads to the relation,
x =
∫ g(x)
y0
dy
r(y), (6.24)
which has to be inverted to obtain g(x). A particularly simple form is obtained for a piecewise linear
distance ratio function r(y) given by specifying the values ri = r(yi) at a set of points yi. Here, yi
are just a means of specifying the distance ratio function and should not be confused with the final
points yi of the grid. The distance ratio function is then given by
r(y) =ri+1 − riyi+1 − yi︸ ︷︷ ︸
≡ci
y + ri − yiri+1 − riyi+1 − yi
︸ ︷︷ ︸
≡di
, yi ≤ y ≤ yi+1 . (6.25)
Integration and inversion yields,
g(x) =
{ rici
(ecix − 1) + yi , ci 6= 0 ,
rix + yi , ci = 0 ,xi ≤ x ≤ xi+1 , (6.26)
where
xi =i−1∑
j=0
Ij , Ii =
∫ yi+1
yi
dy
ciy + di=
{ 1ci
ln ri+1
ri, ci 6= 0 ,
yi+1−yi
ri, ci = 0 .
(6.27)
Fig. 6.1 shows an example of a grid generated with such a piecewise linear distance ratio function.
Fig. 6.2 and 6.3 show an example of the time-dependence of the value of a European put option in
the Black-Scholes model obtained from a finite-difference solution of the backwards pricing equation.
For practical applications in Chap. 7, we will rather solve the forward Dupire equation for the
European call option to obtain the entire smile for all strikes at once. Due to the absence of drift
and discount terms, the numerical setup to solve the Dupire equation is identical to the one described
in the current section provided that the roles of f and K are interchanged.
45

10−4
10−2
100
102
10−1
100
101
102
103
τ
f
Figure 6.2: Grid in the τ and f directions used for the finite difference solution of the Black modelas shown in Fig. 6.3. Each grid contains 100 points. Note the logarithmic scale on both axes.
10−4
10−3
10−2
10−1
100
101
102
0
0.2
0.4
0.6
0.8
1
τ
V(τ
,f)
10−4
10−3
10−2
10−1
100
101
102
0
1
2
3
4
5
6
7x 10
−3
τ
abso
lute
err
or
Figure 6.3: Comparison of finite difference solution for the time dependence of the option valuein the Black model with the analytical expression. The grid used is shown in Fig. 6.2. The leftpanel shows the option values for a European put with fixed strike K = 1 and different initial ratesf = 0.2, 0.4, . . . , 1.4. Note that the limit of the option value for τ → 0 is the payoff (K−f)+ whereasfor τ → ∞ the value of the put goes to K. Solid lines are the analytical solution, crosses give theresult of the finite difference scheme. The right panel shows the absolute errors. Note that τ is thedimensionless time to maturity corresponding to σ = 1.
46

6.1.2 Extension to two-factor models
Basic finite-difference schemes for two-dimensional models can be constructed along the same lines
as in one dimension. The discretization now involves three grids: τl, l = 0, . . . , L, and fm, m =
0, . . . ,M , in the time and rate directions as before as well as a new grid αn, n = 0, . . . , N , for
the volatility variable α. The discrete approximation to the option value on a grid point is now
denoted by V lm,n = V (τl, fm, αn). Finite-difference operators for spatial derivatives involve a nine-
point stencil centered at the point with indices (m,n). The coefficients can be expressed in terms
of products of the one-dimensional coefficients given in Tab. 6.1 [36]. More specifically, the second
derivative with respect to the rate now reads as,
∂2fV (τl, fm, αn) →
0 c(2)f,m 0
0 b(2)f,m 0
0 a(2)f,m 0
︸ ︷︷ ︸
[∆(2)f ]m,n
⋆
V lm−1,n−1 V l
m−1,n V lm−1,n+1
V lm,n−1 V l
m,n V lm,n+1
V lm+1,n−1 V l
m+1,n V lm+1,n+1
︸ ︷︷ ︸
[V l]m,n
, (6.28)
where the coefficients a(2)f,m, b
(2)f,m and c
(2)f,m are taken from the last line of Tab. 6.1 with xi replaced
by fm. We make use of a stencil notation, where the action of the star multiplication is defined as
follows,
a−1,−1 a−1,0 a−1,1
a0,−1 a0,0 a0,1a1,−1 a1,0 a1,1
⋆ [V l]m,n ≡1∑
r,s=−1
ar,sVm+r,n+s . (6.29)
Similarly, the discrete version of the second derivative with respect to the volatility variable becomes,
∂2αV →
0 0 0
c(2)α,n b
(2)α,n a
(2)α,n
0 0 0
︸ ︷︷ ︸
[∆(2)α ]m,n
⋆[V l]m,n . (6.30)
Here again, the coefficients are given in Tab. 6.1 with xi now replaced by αl. First derivatives with
respect to the rate and the volatility have the same form as the second derivatives in Eqs. (6.29) and
(6.30) with the coefficients then taken from the middle row of Tab. 6.1. These will not be needed
for our purposes however. Finally, the mixed second derivative is given by
∂f∂αV →
c(1)f,mc
(1)α,n c
(1)f,mb
(1)α,n c
(1)f,ma
(1)α,n
b(1)f,mc
(1)α,n b
(1)f,mb
(1)α,n b
(1)f,ma
(1)α,n
a(1)f,mc
(1)α,n a
(1)f,mb
(1)α,n a
(1)f,ma
(1)α,n
︸ ︷︷ ︸
[∆(2)fα ]m,n
⋆[V l]m,n
→ 1
4δfδα
1 0 −10 0 0−1 0 1
⋆ [V l]m,n , (6.31)
where the simplified form in the last line is valid for grids with uniform spacing in both directions.
The discrete approximation to the spatial operator of the extended SABR model in Eq. (2.6) then
47

Figure 6.4: Illustration of the lexicographic ordering. Components originally arranged in a rect-angular grid have to be read column by column (left panel) to arrive at the f ordering defined inEq. (6.33) while reading row by row (right panel) results in the α ordering as in Eq. (6.34). For therequired index arithmetic, the use of MATLABs reshape function together with matrix transposesturns out to be very useful.
reads as,
LV →{
1
2α2nC
2(fm)[∆(2)f ]m,n +
1
2α2n[∆(2)
α ]m,n + ρν2α2n[∆
(2)fα ]m,n
}
⋆ [V l]m,n . (6.32)
For an efficient implementation on a computer, the application of the finite difference operator needs
to be expressed as a standard multiplication with a (sparse) matrix. To this end, the components of
Vl at a fixed time slice have to be aligned into a one-dimensional vector. The two following so-called
lexicographic orderings will be used,
Vlf = (V l
0,0, Vl1,0, . . . , V
lM,0, V
l0,1, . . . , V
lM,1, . . . , V
l0,N , . . . , V l
M,N ) ,
= (V lf,1, . . . , V
lf,(M+1)(N+1)) , (6.33)
Vlα = (V l
0,0, Vl0,1, . . . , V
l0,N , V l
1,0, . . . , Vl1,N , . . . , V l
M,0, . . . , VlM,N )
= (V lα,1, . . . , V
lα,(M+1)(N+1)) . (6.34)
It is easy to see that the part of the spatial operator containing the second order f derivative will
be tridiagonal with the first ordering while with the second, the derivatives with respect to α will
be tridiagonal. Hence the subscript on the vector Vl for the two orderings. Fig. 6.4 illustrates how
the components of the rectangular grid with indices m and n are ordered in Eqs. (6.33) and (6.34).
For a conversion between the two orderings, the components of the vectors have to be rearranged,
i.e.
Vlf = P fαV
lα , V
lα = P αfV
lf . (6.35)
Here, P fα and P αf are permutation matrices defined as
[P fα]n(M+1)+m+1,n+1+m(N+1) = 1 , m = 0, . . . ,M , n = 0, . . . , N , (6.36)
and all other elements equal to zero as well as P αf = PTfα = P
−1fα.
Once an ordering is chosen, the discrete approximation of the operator L in Eq. (6.32) then turns
into a matrix L which has the following contributions,
L = Lf + L
α + Lfα . (6.37)
48

Here, Lf contains the second derivatives with respect to f , Lα contains the second derivatives with
respect to α, and Lfα represents the mixed derivatives. In Eq. (6.37), we have not explicitly stated
the ordering employed to set up the matrices. We can do so by adding a subscript f or α. All
matrices will thus have two forms, related by reshuffling of indices, e.g.
Lfα = P αfL
ffP fα . (6.38)
With their natural ordering, the matrices Lff and L
αα are tridiagonal. Explicitly, we have
Lff =
α20M
f = 0
α21M
f
. . .
α2NM
f
, (6.39)
where
Mf =
0 0c1 b1 a1
c2 b2 a2. . .
cM−1 bM−1 aM−1
0 0
. (6.40)
The coefficients are the same as in the one-dimensional local volatility model, i.e. am = 12C
2(fm)a(2)f,m
and similarly for bm and cm. Furthermore,
Lαα =
Mα
Mα
. . .M
α
, (6.41)
where now all M + 1 blocks are identical and given by
Mα =
0 0
c1 b1 a1c2 b2 a2
. . .
cN−1 bN−1 aN−1
0 0
, (6.42)
with the coefficients an = 12α
2na
(2)α,n, bn = 1
2α2nb
(2)α,n and cn = 1
2α2nc
(2)α,n. Note that we have already
made use of the convenient boundary conditions of vanishing second order derivatives ∂2fV and ∂2
αV
at the boundaries similar to the procedure in one dimension. This dispenses us from the explicit
treatment of boundary vectors and only requires a simple adjustment of the matrices. The matrix
Lfα from mixed derivatives cannot be made tridiagonal in any ordering. In the f or α ordering, it
is band diagonal with a very sparsely populated band. Non-zero entries are located at a maximum
distance of N + 2 or M + 2 from the diagonal, respectively. We will refrain from giving a graphical
representation of Lfα here and simply note that the components of a matrix Mf for a general
9-point stencil [a]m,n with parts am,nr,s in the f ordering are given by
[Mf ]n1(M+1)+m1+1,n2(M+1)+m2+1 =
1∑
r,s=−1
am,nr,s δn1(M+1)+m1+1,(n2+s)(M+1)+m2+r+1 , (6.43)
49

with mi ∈ (0, . . . ,M) and ni ∈ (0, . . . , N). Eq. (6.43) can be implemented efficiently using vector
arithmetic and sparse matrices in MATLAB.
Once the matrices for spatial derivatives are set up, the time stepping in finite-difference schemes
can be expressed through matrix operations as for schemes in one dimension. The θ-scheme again
reads as,
[1− δτlθL]V l+1 = [1 + δτl(1 − θ)L]V l , (6.44)
where we have deliberately not indicated the ordering of vectors and matrices by subscripts. All
matrices and vectors have to be chosen with the same ordering (same subscript f or α), but none
of the orderings is preferable as L is only band diagonal and not tridiagonal as in one dimension.
The solution of the linear system in Eq. (6.44) can thus no longer be done by quick Gaussian
elimination with a cost linear in the matrix size. More involved methods such as iterative solutions
or factorizations adapted to sparse matrices have to be used. In MATLAB, we can still use the
backslash notation ’\’ to solve the system, but the computational cost will be higher as internally
more involved methods are used.
To revert to the simplicity and efficiency for tridiagonal matrices, several so-called splitting
schemes have been proposed in the literature that introduce intermediate fractional time steps. For
each intermediate step only one of the matrices Lf or L
α is involved in the implicit part of the
linear system. Choosing the appropriate ordering, the solution of the linear system thus involves
only a tridiagonal matrix. The natural ordering changes between subsequent intermediate time
steps, requiring a reshuffling of the vectors of option prices. For an explicit introduction of the
splitting schemes, consider first the case ρ = 0 for which the mixed derivatives in Lfα vanish. A
split version of the Crank-Nicolson scheme then reads as,
[
1− 1
2δτlL
ff
]
Vl+ 1
2
f =
[
1 +1
2δτlL
ff
]
Vlf ,
Vl+ 1
2α = P αfV
l+ 12
f ,[
1− 1
2δτlL
αα
]
Vl+1α =
[
1 +1
2δτlL
αα
]
Vl+ 1
2α ,
Vl+1f = P fαV
l+1α , (6.45)
where we have explicitly indicated the required ordering and the reshuffling of the indices between
steps. It turns out however that the second-order consistency in time of the Crank-Nicolson scheme
is lost by the splitting in Eq. (6.45) and reduced to first order consistency even for ρ = 0. A proof
involves only straightforward Taylor expansions in δτl (see [36] for details). It turns out that a
second-order consistent scheme can be recovered by simply interchanging the matrices Lf and L
α
50

on the left-hand side of Eq. (6.45) (or alternatively on the right-hand side for that matter), yielding
[
1− 1
2δτlL
αα
]
Vl+ 1
2α = P αf
[
1 +1
2δτlL
ff
]
Vlf ,
[
1− 1
2δτlL
ff
]
Vl+1f = P fα
[
1 +1
2δτlL
αα
]
Vl+ 1
2α . (6.46)
The scheme is called alternating direction implicit (ADI). However, for ρ 6= the mixed derivatives
have to be taken into account. They are usually added to the explicit parts on the right hand
side destroying again the second-order consistency in time. An alternative splitting scheme is given
by Yanenko [59] and is obtained by starting from a purely implicit scheme and adding the mixed
derivatives as explicit parts after splitting. In detail, it reads as
[1− δτlLff ]V
l+ 12
f =
[
1 +1
2δτlL
fαf
]
Vlf ,
[1− δτlLαα]V l+1
α = P αf
[
1 +1
2δτlL
fαf
]
Vl+ 1
2
f ,
Vl+1f = P fαV
l+1α . (6.47)
Again, this scheme is only first order consistent in time (see [53] and references therein for details
and proofs). By combining it with extrapolation methods, the order of consistency in time and thus
the order of convergence can be increased.
We follow the recommendation by Sheppard [53] for the SABR model and use a third order
consistent Khaliq and Twizell scheme [35]. Formally, the Yanenko scheme in Eq. (6.47) can be
written as Vl+1f = M (δτl)V
lf where
M(δτ) = P fα[1− δτLαα]−1
P αf
[
1 +1
2δτLfα
f
]
[1− δτLff ]−1
[
1 +1
2δτLfα
f
]
. (6.48)
Of course, an implementation always reverts back to Eq. (6.47) and never uses numerical matrix
inversions. Eq. (6.47) is just a convenient short hand. A third order extrapolation scheme now
subdivides the time step δτl into 3 equal subintervals and considers all possible ways to reach the
time step l + 1 from l by combining Yanenko substeps with sizes δτl/3, 2δτl/3 and δτl, yielding the
following possibilities,
Vl+1f,1 = M
3(δτl/3)V lf ,
Vl+1f,2 = M(2δτl/3)M(δτl/3)V l
f ,
Vl+1f,3 = M(δτl/3)M(2δτl/3)V l
f ,
Vl+1f,4 = M(δτl)V
lf . (6.49)
A linear combination of these 4 is then chosen for the final value Vl+1f such that the scheme is
third order consistent. This choice involves a straightforward but very lengthy and tedious Taylor
51

expansion of the inverse matrices in δτl. We will not reproduce it here, but refer the reader to
Sheppard’s thesis for the details [53]. The result is as follows,
Vl+1f =
9
2V
l+1f,1 − 9
4V
l+1f,2 − 9
4V
l+1f,3 + V
l+1f,4 . (6.50)
00.20.40.60.81
0
5
10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f
α
V
Figure 6.5: Example of option prices in the standard SABR model with β = 1 and ρ = 0 obtainedwith a two-dimensional finite-difference scheme. Results are from an ADI method, the non-uniformspatial grid has concentration points around the strike K = 1.0 and the initial volatility α = 0.1and M = N = 100 points in each direction. A uniform temporal grid with L = 100 points was used.Other parameters are T = 5 and ν = 0.3.
52

6.2 Monte Carlo
A Monte Carlo simulation of a European option price replaces the average in the pricing measure
of the payoff at maturity,
V (t, x) = E[g(XT )|Xt = x] , (6.51)
by an average over a finite number of realizations,
V (t, x) ≈ 1
N
N∑
i=1
g(X(i)T ) . (6.52)
Here, in general Xt is a vector of continuous time stochastic processes satisfying the stochastic
differential equations,
dXt = µ(Xt, t)dt + σ(Xt, t)dWt , (6.53)
with the initial condition X0 = x. For rare cases in which the terminal distribution of XT is known
analytically or even an analytic solution of the SDE can be derived, the terminal distribution can be
sampled directly in a so-called ’exact’ Monte Carlo scheme. For all other cases, the SDE has to be
simulated by replacing the continuous-time process by a discrete-time approximation. The simplest
and most popular scheme is the stochastic Euler or Euler-Maryuama scheme which reads as
Xi+1 −Xi = µ(Xi, t)δt + σ(Xi, t)ωi
√δt . (6.54)
Here, δt = T/M is the time step, Xi are approximations to the continuous process at time step
ti = iδt, and ωi is a vector of correlated normal variables with unit variance.
A naive application of this prescription to the (extended) SABR model would yield the following
Euler scheme,
Fi+1 = Fi + αiC(Fi)ω(1)i
√∆t ,
αi+1 = αi + ναiω(2)i
√∆t . (6.55)
where ω(1)i and ω
(2)i are correlated random variables that can be obtained from independent standard
normal variables z(1)i and z
(2)i via the Cholesky decomposition,
ω(2)i = z
(2)i , ω
(1)i =
√
1 − ρ2z(1)i + ρz
(2)i . (6.56)
However, note that the discrete volatility process αi+1 in Eq. (6.55) can become negative, if for a
small starting value αi and a relatively large time step δt a negative value of ω(2)i is sampled with
ω(2)i < − 1
ν√δt
. (6.57)
This behaviour is in contrast to the known solution to the SDE for geometric Brownian motion
(GBM) of αt that is garanteed to stay positive for all times. Similarly, the discrete rate process
53

Fi can also become negative, potentially resulting in undefined or imaginary values of C(Fi) for
the following time step. The exact solution for the GBM SDE for αt suggests to transform the
continuous time dynamics to the logarithmic variables Xt = lnFt and Yt = lnαt by using Ito’s
Lemma, yielding
dXt = −α2tC(Ft)
2
2F 2t
dt + αtC(Ft)
FtdW
(1)t ,
dYt = −ν2
2dt + νdW
(2)t . (6.58)
Applying the Euler discretization scheme to the processes Xt and Yt and subsequently transforming
back to Fi and αi, yields the logarithmic Euler scheme,
Fi+1 = Fi exp
(
−α2iC(Fi)
2
2F 2i
∆t + αiC(Fi)
Fi
√δtω
(1)i
)
,
αi+1 = αi exp
(
−ν2
2δt + νω
(2)i
√δt
)
. (6.59)
Note that the evolution of the volatility is captured exactly in this scheme. For the rate process, we
could have alternatively used the transformation Xt = Σ(Ft) with Σ(f) define in Eq. (3.57) resulting
in the scheme
Fi+1 = Σ−1
(
Σ(Fi) −α2iC
′(Fi)
2δt + αi
√δtω
(1)i
)
,
αi+1 = αi exp
(
−ν2
2δt + νω
(2)i
√δt
)
. (6.60)
It turns out that for a C(f) that starts out proportional to f , i.e. C(f) → cf for f → 0 as in the
two- or three-regime model or the cubic toy model, both schemes in Eqs. (6.59) and (6.60) are viable
numerically.
In contrast, for the original SABR model with C(f) = fβ and 0 < β < 1 the derivative C′(f)
or the quotient C(f)/f are divergent for f → 0 and both schemes become unstable. This is a
signature of the fact that zero rates are attainable in the SABR and the corresponding CEV model
(see Sec. 7.1.1). In order to include this possibility in the discrete simulation, we can stick with the
naive Euler discretization and force the rate process to stay non-negative by hand, i.e. we use the
scheme,
Fi+1 = q(
Fi + αiFβi ω
(1)i
√∆t)
,
αi+1 = αi exp
(
−ν2
2δt + νω
(2)i
√δt
)
, (6.61)
with q(x) = x+ = max(x, 0) (absorbing boundary) or q(x) = |x| (reflecting boundary). Note that in
the continuous time case a reflecting boundary leads to arbitrage opportunities as the rate can leave
the boundary at 0 with a finite probability leading to a potential upside gain with no possibility
for a downside loss. We will thus also exclude the reflecting boundary q(x) = |x| in the discrete
54

case. However even for q(x) = x+, the strict Martingale property of the rate process is lost. This is
most easily seen for a single time step. In the unfixed scheme in Eq. (6.55) the rate is a Martingale,
i.e. E[Fi+1] = Fi since E[ω(1)i ] = 0. By the fix in Eq. (6.61), the probability density for negative
samples of ω(1)i is shifted by hand upward to 0 leading to a positive drift. This truncation bias is
reduced with increasing number of time steps, but a potentially very large number of steps is needed
to make it vanish up to the required accuracy. On the contrary, for the log scheme or the H scheme
in Eqs. (6.59) and (6.60) the Martingale property is preserved exactly.
In the context of the Heston model and extensions thereof, Lord et al. [42] have compared
different fixes for an Euler discretization of a square root variance process. Transferring their notation
to the rate process of the SABR model would yield a set of schemes,
Fi+1 = q1(Fi) + αiq2(Fi)βω
(1)i
√∆t ,
Fi+1 = q2(Fi+1) . (6.62)
An auxiliary process Fi is introduced which can be allowed to become negative. The functions
qi(x) are chosen to be either the identity x, the absolute value function |x| or x+. In addition to
the absorbing boundary with qi(x) = x+, i = 1, 2, and the reflecting boundary with qi(x) = |x|,i = 1, 2, they consider truncated schemes which here would result in the choice q1(x) = x and
q2(x) = x+. Note that in their case a drift term is present, leading to additional degrees of freedom
and the distinction between a partially and a fully truncated scheme. Their recommendation from
numerical experiments is to use a truncated scheme due to a smaller truncation bias (in their case
the fully truncated version is superior). Note that the auxiliary process does in this case preserve
the Martingale property.
Recently, Chen et al. [14] have introduced a Monte Carlo scheme for the SABR model that
has a significantly reduced truncation bias. The spirit builds on the idea of ’exact simulations’
as introduced by Broadie and Kaya [12] for the Heston model. The low-bias scheme for the SABR
model makes use of the known transition density for the CEV model (see Sec. 7.1.1) and uses mixing
to combine this with sampling of the distribution of total variance. More specifically, for each time
step a sample of the terminal volatility αi+1 is first drawn from a log-normal distribution as in
the schemes discussed here. The conditional distribution of the integrated variance∫ ti+1
tiα2tdt is
then sampled numerically by using a moment-matched approximate log-normal probability density.
Finally a sample of Fi+1 is drawn from the CEV transition density conditional on the total variance.
Even though some intermediate approximations are used to avoid the evaluation of special functions
as much as possible, individual time steps are quite expensive in this scheme. However, due to the
reduced bias a considerably smaller number of time steps can be used as compared to the fixed
Euler schemes which makes the scheme attractive in terms of total computational cost for a required
accuracy. Here, we are mainly interested in Monte Carlo as a gauge of more efficient analytical or
55

semi-analytical approximations. Efficiency of the MC scheme is thus not our major concern. Even
optimized schemes do not seem to be efficient and accurate enough for a fast calibration procedure.
We will thus refrain from implementing the reduced-bias scheme here.
For practical applications of Monte Carlo, an estimate of the error bar of the results is of vital
importance. The total error has contributions from two components. First, the finite number of
sampling paths introduces a sampling error. From the law of large numbers, the contribution to the
error of the European option value can be estimated as
sampling error ≈√
var(VM )
N, (6.63)
where var(VM ) is the sample variance of the payoff evaluated at the final time step VM = g(FM ).
A second contribution comes from the discretization of the time domain. For European options the
weak error defined as
weak error = E[g(FT ) − g(F δtT )] , (6.64)
is the relevant measure of discretization error. Here, E[g(F δtT )] is meant to denote the Monte Carlo
average as defined in Eq. (6.52). An estimate of the weak error can be obtained from comparing
option values obtained with M and 2M time steps, i.e.
weak error ≈ E[g(Fδt/2T ) − g(F δt
T )] . (6.65)
In evaluating Eq. (6.65), it is important to use the same source of randomness for the simulation of the
option value with time step δt and δt/2. To this end, the random increments ∆Wδt/2t = ω
δt/2i
√
δt/2
are first drawn for the process with finer time step and then combined as ∆W δtt = ∆W
δt/2t +∆W
δt/2t+δt/2
to random increments for the coarser grid. This allows to estimate the weak error by separating it
from the sampling error. The total error bar is usually estimated as the root-mean-square error,
r.m.s. error =√
(sampling error)2 + (weak error)2 . (6.66)
The total computational cost of a Monte Carlo calculation is roughly proportional to the product
MN of the number of time steps M and the number of sample paths N . Thus, for a required
accuracy as measured by the r.m.s. error, M and N should be chosen such that the sampling error
and the weak error are of equal magnitude. For a globally Lipshitz continuous payoff, the order of
weak convergence is usually equal to 1, i.e. weak error ∼ δt as δt → 0. The variance of the payoff
tends to a constant with increasing number of paths such that sampling error ∼ N− 12 . Consequently,
we should increase the number of paths as N ∼ M2 with increasing number of time steps to keep
the balance between weak and sampling error. This optimal choice leads to a computational cost
that scales as ǫ−32 [17].
56

Chapter 7
Quantitative comparison ofdifferent approximation schemes
In this chapter, we apply the approximate analytical and semi-analytical as well as numerically exact
methods developed in previous chapters. The aim is to gauge the accuracy of the approximations for
the extended SABR model. However, we will also look at the underlying local volatility models in
some detail as some qualitative feature can already been seen there and the heat-kernel approxima-
tion can be evaluated to higher orders. Thus, the relevance of higher-order correction terms can be
analysed. Furthermore, a good handle on the local-volatility models is also required for the mixing
approach to the full SABR model as described in Chap. 4. All implementations for this thesis are
in MATLAB, the run times quoted are for a standard laptop (Lenovo T400).
7.1 Local volatility models
7.1.1 Constant elasticity of variance (CEV)
The constant elasticity of variance (CEV) model defined in our notation by C(f) = fβ is one of
the rare cases beyond the Black and Black-Scholes models for which analytical results are available
for the transition density and European option prices. Furthermore, the heat-kernel expansion can
be evaluated up to very high order [55]. Thus, besides being the basis for the stochastic volatility
extension to the SABR model, the CEV model constitutes a very good test case for the accuracy
of the perturbative results. The model has first been proposed by Cox and Ross [15]. A recent
comprehensive review of analytical results is given by Brecher and Lindsay [41]. Here, we will cite
some of the results without derivation as far as needed for the purpose of the comparison with the
heat-kernel expansion. For the details and references to the original literature, the reader is referred
to [41].
Different regimes have to be distinguished according to the value of the exponent β. For β = 1,
the model is equivalent to Black’s model and results have already been given before. In the regime
0 < β < 1 most relevant for applications, the boundary f = 0 is attainable and thus boundary
57

conditions have to be given special care. For 12 ≤ β < 1, f = 0 is an absorbing barrier, i.e. once
the process reaches the boundary it will stay there forever. For 0 < β < 12 , the boundary can be
absorbing or reflecting and an additional boundary condition has to be imposed. It has been argued
that in order to obtain an arbitrage free model, the boundary should always be absorbing and we
will only consider this case here (see e.g. Sec. 3.10.2 in [51] for a discussion of this point). For β = 0,
the process is equivalent to a Brownian motion and negative rates are possible. Note however that
the limit β → 0 is different from β = 0, since for any β > 0 negative rates are excluded and replaced
by a δ-contribution to the transition density at F = f (see below). The regime β > 1 poses special
problems due to a violation of the strict Martingality [41], but we will not be concerned with this
regime here.
For 0 < β < 1 with absorbing boundary conditions at f = 0, the analytical expression for the
transition density is given by
p(τ, f, F ) =F
12−2β
(1 − β)σ2τ
√
f exp
(
−F 2(1−β) + f2(1−β)
2(1 − β)2σ2τ
)
I 12(1−β)
((fF )1−β
(1 − β)2σ2τ
)
, (7.1)
where Iν(x) is the modified Bessel function of the first kind defined by
Iν(x) =(x
2
)ν ∞∑
k=0
(x2/4)k
k!Γ(ν + k + 1), (7.2)
and Γ(s) = Γ(s, 0) is the standard gamma function where Γ(s, x) is defined as
Γ(s, x) =
∫ ∞
x
us−1e−udu . (7.3)
Due to absorption at zero, the distribution in Eq. (7.1) is norm deficient with
∫ ∞
0
p(τ, f, F )dF = P
(1
2(1 − β),
f2(1−β)
2(1 − β)2σ2τ
)
< 1 . (7.4)
Here, P (s, x) = 1 − Γ(s, x)/Γ(s) is the normalized incomplete gamma function with Γ(s, x) defined
in Eq. (7.3). Note that we use the notation for gamma functions from Abramowitz’s and Stegun’s
reference manual [1] differing slightly from the notation in [41]. The missing probability weight in
Eq. (7.4) is the probability of absorption and is concentrated as a δ-function contribution at F = 0.
The value of a European call option in the CEV model (again for 0 < β < 1 and an absorbing
boundary at zero) can be expressed in terms of the cumulative distribution function of the non-
central χ2 process,
C(τ, f,K) = f
[
1 − χ′2(
K2(1−β)
(1 − β)2σ2τ,
3 − 2β
1 − β,
f2(1−β)
(1 − β)2σ2τ
)]
−Kχ′2(
f2(1−β)
(1 − β)2σ2τ,
1
1 − β,
K2(1−β)
(1 − β)2σ2τ
)
, (7.5)
where χ′2(x, k, λ) is the cumulative distribution function of the non-central χ2-distribution with
degrees of freedom k and non-centrality parameter λ. Major software packages such as MATLAB
58

provide built-in functionality for all the special functions required in this section. However, the
evaluation of χ′2 (ncx2cdf in MATLAB) can be quite slow as it is usually based on a truncation of
the infinite series,
χ′2(x, k, λ) =
∞∑
i=0
e−λ2 (λ/2)i
i!χ2(x, k + 2i) , (7.6)
where the cumulative central χ2-distribution χ2(x, k) can be expressed in terms of (incomplete)
gamma functions. Schroder [52] compiles a range of more efficient numerical approximation strate-
gies. For our purposes however, the build in functions will suffice.
Turning to the heat-kernel approximations for the CEV model, we note that the Σ-integrals
are given in App. B. As pointed out by Taylor [55], the recursion relation in Eq. (3.62) for the
coefficients ak(f, F ) of the asymptotic heat-kernel expansion of the transition density in Eq. (3.61)
can be solved explicitly and reduced to a simple algebraic recursion. The coefficient functions are
all of the form
ak(f, F ) =
[(1 − β)2
2(fF )1−β
]k
αk (7.7)
with α0 = 1 and
αk =
[
k − 2−β2(1−β)
] [
k + β2(1−β)
]
kαk−1 . (7.8)
The heat-kernel expansion for the transition density can thus be written as follows,
p(τ, f, F ) =
√
fβ
2πσ2τF 3βexp
(
− (F 1−β − f1−β)2
2σ2τ(1 − β)2
) ∞∑
k=0
[(1 − β)2σ2τ
2(fF )1−β
]k
αk . (7.9)
Note that the recursion in Eq. (7.8) terminates at the kth term for the following particular values
of β,
β =2k − 2
2k − 1, (7.10)
leading to a finite sum in Eq. (7.9). This occurs for the values β = 0, 23 ,45 ,
67 , etc. for which also
simplified option valuation formulas in terms of purely the normal distribution function are known
(see e.g. Sec. V in [52]).
Eq. (7.8) remains valid for β → 1 provided it is properly normalized as αk = (1 − β)2kαk.
In this case, we can resum the expansion in Eq. (7.9) noting that the recursion has the solution
ak(f,K) = (−1)k
8kk! such that∑∞
k=0 akσ2kτk = exp(−σ2τ
8 ) and the Eq. (7.9) reduces to the well-known
log-normal distribution,
p(τ, f, F ) =
√
f
2πσ2τF 3e−
ln2 Ff
2σ2τ− σ2τ
8 =1√
2πσ2τF 2e− 1
2σ2τ
(
ln Ff +σ2τ
2
)2
. (7.11)
Figs. 7.1 and 7.2 show a comparison of the heat-kernel expansion of the transition density with
the exact expression in Eq. (7.1) for different values of β, times to maturity τ and orders of the
expansion. For β = 12 , one notes a degeneracy at low rates F that becomes worse with increasing
order of the approximation. As is typical of an asymptotic series, for fixed parameters and fixed τ ,
59

0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
F
p(τ,
f,F)
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
F
p(τ,
f,F)
Figure 7.1: CEV transition density for f = 1, σ = 0.3 and β = 12 and τ = 5 (left) or τ = 10 (right).
The solid line is the exact density in Eq. (7.1), the dashed lines give the heat-kernel expansion witha maximal k from top to bottom of 0, 1, 2, 3, 4, 5, 10, 20.
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
F
p(τ,
f,F)
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
F
p(τ,
f,F)
Figure 7.2: Same as Fig. 7.1 for β = 45
there is an optimal number of terms to be retained and beyond which the error committed increases
again until the series eventually diverges. For β = 45 which is among the special values in Eq. (7.10),
the series terminates after k = 2 and the first three terms provide actually an exact expression for
the transition density. We have only verified this equality numerically, but expect that it can also
be shown analytically by using the properties of special functions.
Using the integrals defined in Eq. (3.43), the value of the European call option has the following
series expansion,
C(τ, f,K) = (f −K)+ (7.12)
+
√
fβKβ
8π
∞∑
k=0
[(1 − β)2σ2τ
2(fK)1−β
]k
αkIk
((K1−β − f1−β)2
(1 − β)2, σ2τ
)
.
Here, the coefficients αk follow the recursion relation in Eq. (7.8) and the functions Ik can be
expressed in terms of elementary exponentials and the standard normal cumulative distribution
function via the recursion in Eq. (3.44).
Figs. 7.3 and 7.4 show a comparison of the option value in Eq. (7.13) with the exact result. Note
that for the special value β = 45 , the series again terminates with a maximal k of 2 and then coincides
60

10−3
10−2
10−1
100
101
0
0.2
0.4
0.6
0.8
1
τ
C(τ
,f,K
)
10−3
10−2
10−1
100
101
0
0.2
0.4
0.6
0.8
1
τ10
−310
−210
−110
010
10
0.2
0.4
0.6
0.8
1
τ
Figure 7.3: Time dependence of the value of the European call option for the CEV model in theheat-kernel approximation as compared to the exact solution for β = 1
2 and σ = 1. Left, middle andright panels are for f = 0.5, f = 1 and f = 1.5, respectively. The strike is K = 1. The solid lineis the exact option value in Eq. (7.5), the dashed lines give the heat-kernel expansion in Eq. (7.13)with a maximal k from top to bottom of 0, 1, 2, 3, 4, 5, 10, 20.
10−3
10−2
10−1
100
101
0
0.2
0.4
0.6
0.8
1
τ
C(τ
,f,K
)
10−3
10−2
10−1
100
101
0
0.2
0.4
0.6
0.8
1
τ10
−310
−210
−110
010
10
0.2
0.4
0.6
0.8
1
τ
Figure 7.4: Same as Fig. 7.3 for β = 45
with the exact result. But also for values of β away from the special values, the first few terms of
the expansion provide a good approximation of the option values for dimensionless time of up to
σ2τ = 1 or even larger. In contrast, if the involved cumulative normal distribution functions are
further expanded in an asymptotic expansion for small times τ , the series in Eq. (3.65) is obtained
which for the CEV model reduces to
C(τ, f,K) =
√
fβKβ(σ2τ)3
2π
2(1 − β)2
(K1−β − f1−β)2exp
((K1−β − f1−β)2
2(1 − β)2σ2τ
)
×∑
k
ck(f,K)(σ2τ)k , (7.13)
where the coefficients satisfy the recursion relation,
ck+1(f,K) = − (2k + 3)(1 − β)2
(K1−β − f1−β)2ck(f,K) + αk+1
((1 − β)2
2(fK)1−β
)k+1
, (7.14)
61

0 0.5 1-1
-0.5
0
0.5
1
1.5
2
τ
C(τ
,f,K
)
0 0.05 0.1-1
-0.5
0
0.5
1
τ0 0.5 1
0
0.5
1
1.5
2
τ
Figure 7.5: Comparison of the asymptotic expansion of the option value in the heat-kernel approx-imation with the exact solution for K = 1.0, β = 4
5 , σ = 1 and f = 0.5 (left), f = 1.1 (middle),f = 1.5 (right). The solid black line is the exact option value in Eq. (7.5), the dashed and dottedlines give the asymptotic expansion in Eq. (7.13) with a maximal k of 0 (dashed black), 1 (dottedblack), 2 (dashed red), 3 (dotted red), 4 (dashed green), 5 (dotted green), 10 (dashed blue), 20(dotted blue).
with the initial condition c0(f,K) = 1 and αk given by Eq. (7.8). Fig. 7.5 compares this asymptotic
series with the analytical formula. The approximation is much worse than Eq. (7.13) and only
applicable for times that are truly asymptotically small. Worse, the approximation deteriorates
with increasing order and oscillations around the true solution from even to odd orders are observed.
The range of applicability in time shrinks with the distance to the at-the-money point. Thus as an
approximation to the option value in its own, the series in Eq. (7.13) is useless. It has to be
resummed in order to avoid the oscillatory behaviour. One way of doing so is to determine the
implied volatility and using the Black model as a resummation. Thus, Eq. (7.13) should only be
used to match coefficients with a similarly expanded effective model such as the Black model.
Finally, Figs. 7.6 and 7.7 show the dependence of the implied volatility in the CEV model on the
time to maturity τ as well as the strike K. The heat-kernel approximation is given in Eqs. (3.70) to
Eqs. (3.73). One notices that the approximation is best for β close to 1, i.e. for a CEV model that is
still close to the effective Black model that is used when working with a log-normal implied volatility.
With decreasing β the time domain of applicability of the approximation shrinks and for β = 0.5
the benefit of the second-order approximation over the first order is not clear any more. For large τ ,
the second order does even shown a pathological degeneracy at low rates. A similar behaviour was
observed for the full SABR model by Paulot [46]. As the second order is very cumbersome to obtain
in the full SABR model and from the CEV results is not expected to yield great improvements, we
restrict the calculations to the first order in τ for the full model.
62

0 5 10 150.9
0.95
1
1.05
1.1
σL2τ
σ impl
/ σ L
0 5 10 15
0.7
0.8
0.9
1
1.1
1.2
1.3
σL2τ
Figure 7.6: Time dependence of the implied volatility in the CEV model for β = 0.8 (left) and β = 0.5(right). Note that due to the power law in the CEV model the prefactor σ has a dimension differentfrom the volatility in the Black model. We therefore use the effective the log-normal volatilityσL = σC(f)/f = σfβ−1 appropriate for the initial rate f as a normalization factor. Curves are forK/f = 0.8, 1.01, 1.2 from bottom to top. Solid lines show the exact result obtained from the optionvalue in Eq. (7.5) and a numerical inversion of Black’s formula. The dotted lines show the first-orderheat-kernel approximation, the dashed lines the second order.
7.1.2 Shifted log-normal and shifted CEV
The shifted log-normal and shifted CEV models in Eq. (1.13) move the lower boundary of the range
of possible interest rates from zero to a slightly negative rate −θ. These variants are therefore
discussed as modelling choices to account for occasional historical occurrences of negative rates.
Also, in the current environment with very low short-term rates, it might be advantageous to push
down the problematic absorbing boundary. Furthermore, the shifted log-normal model can be seen
as a local linearization of a more complex C(f) around the initial value f . It provides an easy way of
generating a skew in the implied volatility. Analytical results for the shifted models can be obtained
directly from the un-shifted versions by noting that the SDE of the shifted model reverts to the
original one by the change of variables Ft = Ft + θ. Thus, the transition density is given by
pshifted(τ, f, F ) = E[δ(Fτ − F )|F0 = f ] = E[δ(Fτ − (F + θ))|F0 = f + θ]
= p(τ, f + θ, F + θ) . (7.15)
Similarly, for the option value, we have
Cshifted(τ, f,K) = C(τ, f + θ,K + θ) . (7.16)
Using an implied Black volatility, this simple shift in the rates is accounted for by a non-trivial
time-dependent smile σimpl.(τ,K). An example of how well the heat-kernel approximation accounts
for the implied volatility in the shifted log-normal model is given in Fig. 7.8. Note that contrary
to the CEV model, the second order approximation does not show a pathological behaviour at low
strikes.
63

0 0.5 1 1.5 20.5
1
1.5
2
K
σ impl
. / σ L
0 0.5 1 1.5 20.5
1
1.5
2
K
Figure 7.7: Smile for the CEV model with β = 0.5 as well as σ2Lτ = 2 (left) and σ2
Lτ = 5 (right).The effective log-normal volatility σL is defined in the caption to Fig. 7.6. The solid line showsthe exact result whereas the dotted and dashed lines show the first- and second-order heat-kernelapproximation.
0 0.5 1 1.5 21
1.1
1.2
1.3
1.4
1.5
K
σ impl
. / σ
0 2 4 61.05
1.1
1.15
1.2
1.25
σ2τ
Figure 7.8: Smile (left) and time dependence of the implied volatility (right) for the shifted log-normal model with θ = 0.1, f = 1, σ = 1. On the left, we have σ2τ = 4 whereas on the right thecurves are for K = 1.2, 1.01, 0.8 from top to bottom. The solid line shows the exact result, the dotted,dot-dashed and dashed lines show the zeroth, first and second order heat-kernel approximation.
7.1.3 Two- and three-regime local volatility models
Let us now turn to the three-regime model in Eq. (1.12). To roughly mimic the empirical findings
of de Guillaume et al. [26], we take fL = 1, fR = 6 and κ = 0.25. However, we will mainly be
interested in the behaviour close to the lower switching point which could also be analysed by an
analogous two-regime model omitting the upper switching point.
Fig. 7.9 shows a comparison of the first two orders of the heat-kernel expansion for the transition
density with a Monte Carlo simulation. Diffusion starts at f = 1.5 to the right of the lower transition
point fL = 1. The distribution starts out normal until the lower regime is reached. With increasing
time some probability density seems to get trapped in the lower regime. The first order correction in
the heat-kernel expansion shows a pathological step at the transition point originating from a jump
in the first derivative of C(f). Due to this step, the approximation breaks down first close to the
64

0 1 2 3 40
0.5
1
1.5
F
p(τ,
f,F)
0 1 2 3 40
0.2
0.4
0.6
0.8
1
F
p(τ,
f,F)
0 1 2 3 40
0.2
0.4
0.6
0.8
F
p(τ,
f,F)
0 1 2 3 40
0.1
0.2
0.3
0.4
0.5
F
p(τ,
f,F)
0 1 2 3 40
0.2
0.4
0.6
0.8
F
p(τ,
f,F)
0 1 2 3 40
0.5
1
1.5
F
p(τ,
f,F)
Figure 7.9: Comparison of heat-kernel expansion with a Monte Carlo simulation for the transitiondensity for the local volatility model with 3 linear regimes, fL = 1, fR = 6, κ = 0.25, f = 1.5.Dotted lines correspond to the leading order in the heat-kernel expansion, dashed lines include thefirst correction term. From upper-left to lower right: σ2τ = 0.1, 0.2, 0.5, 0.7, 1.0, 2.0. For the MCsimulation, 100 time steps and 106 paths were used in a logarithmic Euler scheme (see Sec. 6.2).The transition density is obtained by a histogram of the final rates scaled appropriately to matchthe normalization of the probability density.
65

0 2 4 6 80
0.5
1
σ impl
. / σ
0 2 4 6 80
0.5
1
0 2 4 6 80
0.5
1
0 2 4 6 80
0.5
1
K
σ impl
. / σ
0 2 4 6 80
0.5
1
K0 2 4 6 8
0
0.5
1
K
Figure 7.10: Implied volatility smile in the 3 regime local volatility model with fL = 1, fR = 6,σ2τ = 1. The initial rate is f = 0.9, 1.1, 3, 5.9, 6.1, 7 from top left to bottom right. Shown are thefinite difference solution of the forward Dupire equation (black) as well as the zeroth (red), first(green) and second order (blue) heat-kernel approximations.
transition point where at large times, the transition density can become negative.
Fig. 7.10 shows the implied volatility smile for different values of the initial rate f . Unfortunately,
the heat-kernel approximation shows again a degenerate behaviour for f close to a switching point
fL or fR. The approximation deteriorates with increasing order. For a better understanding of the
failure of the heat-kernel approach, let us look at the time dependence of the at-the-money implied
volatility for the same initial values f in Fig. 7.11. The first and second order of the approximation
seem to be completely off, except well inside the middle regime and at small times τ . It seems
that before any correction to the zeroth order smile, i.e. the τ = 0 limit, can be of a sizable effect,
the influence of the switching points is felt resulting in a different type of τ -dependence that is not
captured by the heat-kernel approach. In a sense, the quantities entering the approximation are of
a local nature. The functional shape of C(f) only enters the formulas on the interval [f,K] through
the geodesic distance and integrals of the derivatives in Σ. For both f and K inside the same
regime, the approximation can thus not be influenced by a nearby switching point. On the other
hand, one can view the switching point as a boundary between regimes with well-known solutions
for the pricing PDE. Starting from a binomial-tree representation of a two-regime model, we have
attempted to set up an expansion in the number of barrier crossings. The first two terms account
only for a very small fraction of the total transition density, thus a large and in the continuous
limit presumably infinite number of barrier crossings need to be taken into account. As we have not
managed to resum any subset of paths to a workable approximation for the local volatility model,
we do not show explicit results here. However, the argument shows that a good approximation
66

10-2
10-1
100
101
0.8
1
1.2
1.4
σ impl
. / σ
10-2
10-1
100
101
0.5
1
1.5
10-2
10-1
100
101
0.33
0.34
0.35
0.36
10-2
10-1
100
101
0.16
0.18
0.2
0.22
σ2τ
σ impl
. / σ
10-2
10-1
100
101
0.16
0.17
0.18
0.19
σ2τ10
-210
-110
010
10.16
0.17
0.18
0.19
σ2τ
Figure 7.11: Time dependence of the at-the-money implied volatility in the 3 regime model withfL = 1, fR = 6 for different initial rates f = 0.9, 1.1, 3, 5.9, 6.1, 7 from top left to bottom right.Shown are the finite-difference solution (black) as well as the zeroth (red), first (green) and secondorder (blue) heat-kernel approximations.
for a model with non-analytic switching points cannot be obtained with a local approach such as
the heat-kernel approximation. Also, the Monte Carlo results for the transition density in Fig. 7.9
clearly show an influence of the boundary even when both f and F are inside the middle regime
and in contrast to the heat-kernel approximation for which the leading order and the first order are
identical in this case showing no influence of the nearby fL.
7.1.4 Cubic toy local volatility model
To avoid the non-analytic switching points of C(f) while still roughly capturing the empirical findings
of [26], we analyze the cubic toy model introduced in Eq. (1.14) in the introduction. Fig. 7.12
shows a comparison of the heat-kernel approximation for the transition density with a Monte Carlo
simulation. Obviously, the pathological step from the three-regime model does not show up here. The
second-order heat-kernel approximation provides a very good description of the transition density
and even the first order yields the correct behaviour up to rather large τ . Fig. 7.13 compares the
implied volatility smile from the heat-kernel approximation with numerical finite-difference results.
Again, very good agreement is observed. Deviations first show for large f and large strike K as
the effective instantaneous volatility σinst. ≡ σC(f)/f and therefore the effective dimensionless time
σ2inst.τ is much larger there.
67

0 1 2 3 40
1
2
3
F
p(τ,
f,F)
0 1 2 3 40
0.5
1
1.5
F
p(τ,
f,F)
0 1 2 3 40
0.2
0.4
0.6
0.8
F
p(τ,
f,F)
0 1 2 3 40
0.5
1
F
p(τ,
f,F)
Figure 7.12: Comparison of heat-kernel expansion with a Monte Carlo simulation for the transitiondensity for the cubic toy model with fc = 2, f = 1. Dotted lines correspond to the leading order inthe heat-kernel expansion, dashed lines include the first correction term. From upper-left to lowerright: σ2τ = 0.1, 0.5, 1.0, 2.0.
0 2 4 60.2
0.4
0.6
0.8
σ impl
. / σ
0 2 4 60.2
0.4
0.6
0.8
0 2 4 60.2
0.4
0.6
0.8
0 2 4 60.2
0.3
0.4
0.5
K
σ impl
. / σ
0 2 4 60.2
0.3
0.4
0.5
K0 2 4 6
0.2
0.3
0.4
0.5
K
Figure 7.13: Implied volatility smile in the cubic toy model with fc = 2, σ2τ = 3. The initialrate f = 1, 2, 3, 4, 5, 6 from top left to bottom right. Shown are the finite difference solution of theforward Dupire equation (black) as well as the zeroth (red), first (green) and second order (blue)heat-kernel approximations.
68

0 1 2 30
0.5
1
1.5
p m
0 1 2 30
0.5
1
1.5
0 1 2 30
0.5
1
1.5
FT
p m
0 1 2 30
0.5
1
1.5
FT
Figure 7.14: Marginal transition density for the SABR model with ρ = 0, β = 0.5, f = 1, α = 0.3,ν = 0.5 and different times to maturity τ = 1, 5, 10, 20 from top left to bottom right. The solidline is the leading heat-kernel expansion whereas the histograms are from a Monte Carlo simulationusing a truncated Euler scheme with 106 paths and 1000 time steps.
7.2 SABR model
This section presents the main results for the full SABR model. We treat the standard SABR model
first and then move on to the extended version. The cases ρ = 0 and ρ 6= 0 are treated separately
as for the former we can use the mixing approach described in Chap. 4.
7.2.1 Standard SABR model
7.2.1.1 ρ = 0
We start with the special case of vanishing correlation ρ between the forward rate and the volatility
processes. As an illustration, Fig. 7.14 shows a comparison of the approximate marginal transition
density in Eq. (3.112) with histograms from a Monte Carlo simulation. The qualitative features
are described correctly up to rather large time τ . However, the absorbing boundary seems to be
treated differently. Whereas the true transition density has a delta function contribution at zero
as for the underlying CEV model, the heat-kernel approximation shows some continuously smeared
out probability weight for small rates.
The main focus of the approximations is on the description of the implied volatility smile. To
clearly show the differences between the various approaches, we use an adverse test case with a
rather high volatility of volatility ν = 0.5, an initial volatility of α = 0.3 and a low initial rate of
f = 1. Fig. 7.16 compares the different approximation schemes with numerical results for τ = 5.
The Hagan formula and the first order heat-kernel approximation are of comparable quality. They
agree at the money. For small and large strikes the heat-kernel approximation is slightly better.
69

0 1 2 30
0.5
1
1.5
p m
0 1 2 30
0.5
1
1.5
0 1 2 30
0.5
1
1.5
FT
p m
0 1 2 30
0.5
1
1.5
FT
Figure 7.15: Same as Fig. 7.15 with ρ = −0.5.
Very similar results are obtained from a numerical solution of the one-dimensional Dupire equation
with an effective local volatility as described in Chap. 5. A very fast and accurate description of
the smile for ρ = 0 is obtained by the mixing approach described in Chap. 4. Fig. 7.17 shows the
same comparison for different times to maturity. For small τ , all approaches yield similar results
and deciding which one is better would amount to chasing numerical noise. In practice, bid-ask
spreads will be larger than differences between approaches for small times. The mixing approach
yields a good description for all choices of τ , although at intermediate times some deviations to the
finite difference solution do show up. The strength of the mixing approach lies in the fact that it
gives very good results even or in particular for very large τ where asymptotic expansions fail. The
Hull-White expansion as described in Sec. 4.4 yields the correct form of the smile for very small τ ,
but quickly breaks down for larger τ . We will therefore not consider it any further in the following.
7.2.1.2 ρ 6= 0
Fitting of the standard SABR model to market option prices usually results in rather large negative
correlations ρ. Thus, we analyse the same test case as in the previous subsection, now with ρ = −0.5.
Mixing is not applicable any more, but a contravariate type of correction as discussed in Sec. 4.6
can be attempted. Fig. 7.15 shows the marginal transition density. Figs. 7.18 and 7.19 show results
for the smile obtained within the different approximation schemes. The corrected mixing scheme is
not quite as accurate as pure mixing for ρ = 0, but still seems to be the best choice of method for
the parameter range considered.
70

0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.25
0.3
0.35
0.4
0.45
0.5
K
σ impl
.
Figure 7.16: Implied volatility smile for the SABR model with ρ = 0, β = 0.5, f = 1, α = 0.3,ν = 0.5, τ = 5. Shown are the heat-kernel approximation in the leading time-independent order(dotted black) and with the order τ correction (solid black), the Hagan formula (blue), the mixingapproach with 10 (dotted green), 20 (dashed green) and 100 quantiles (solid green), the effective-local-volatility scheme (magenta) as well as numerical results from a finite-difference ADI scheme(black crosses) and a Monte Carlo simulation (solid red) with an estimated r.m.s. error bar (dottedred). To achieve the shown accuracy, the finite difference scheme uses 200 grid points in all threedirections for a uniform grid in time and non-uniform grids in space with concentration points aroundthe strike K and the initial volatility α. The Monte Carlo simulation uses the truncated Euler schemewith 4 · 106 paths with 1000 time steps each, adjusted such that the weak and sampling error areroughly of the same size. The Monte Carlo simulation took about 15 minutes, the two-dimensionalfinite-difference scheme about 5 seconds per data point and the one-dimensional finite differenceruns to obtain option values for all strikes for the averaging scheme and the Dupire scheme about 5milliseconds.
71

0 0.5 1 1.5 20.25
0.3
0.35
0.4
0.45
0.5
σ impl
.
0 0.5 1 1.5 20.25
0.3
0.35
0.4
0.45
0.5
0 0.5 1 1.5 20.25
0.3
0.35
0.4
0.45
0.5
K
σ impl
.
0 0.5 1 1.5 20.25
0.3
0.35
0.4
0.45
0.5
K
Figure 7.17: Same as Fig. 7.16 for other times to maturity τ = 1, 2, 4, 10 from top left to bottomright. We only show the leading result for each approximation scheme and the time-consuming MonteCarlo simulation is omitted. In addition the solid yellow lines show the Hull-White expansion asdescribed in Sec. 4.4
72

0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.2
0.25
0.3
0.35
0.4
0.45
0.5
K
σ impl
.
Figure 7.18: Implied volatility smile for the SABR model with ρ = −0.5 and all other parametersidentical to Fig. 7.16. The solid green line now shows the result of the mixing approach correctedin a contravariate type by the heat-kernel result as described in Sec. 4.6. The color code for allother results is the same as in Fig. 7.16. The 2D finite difference results are now obtained with athird-order Khaliq-Twizell scheme as described in Sec. 6.1.2.
73

0 0.5 1 1.5 20.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
σ impl
.
0 0.5 1 1.5 20.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 0.5 1 1.5 20.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
K
σ impl
.
0 0.5 1 1.5 20.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
K
Figure 7.19: Implied volatility smile for the SABR model with ρ = −0.5 for τ = 1, 4, 7, 10 from topleft to bottom right. All other parameters and color codes are the same as in Fig. 7.18.
74

7.2.2 Extended SABR model
7.2.2.1 ρ = 0
0 1 2 30
0.5
1
1.5
p m
0 1 2 30
0.5
1
1.5
0 1 2 30
0.5
1
1.5
FT
p m
0 1 2 30
0.5
1
1.5
FT
Figure 7.20: Marginal transition density for the extended 3 regime SABR model with ρ = 0, fL = 1,fR = 6, κ = 0.25, f = 1.5, α = 0.3, ν = 0.5 and different times to maturity τ = 1, 5, 10, 20 fromtop left to bottom right. The solid line is the leading heat-kernel expansion whereas the histogramsare from a Monte Carlo simulation using a logarithmic Euler scheme with 106 paths and 1000 timesteps.
Let us now turn to the model of main interest, namely the extended 3 regime SABR model.
Fig. 7.20 shows the marginal transition density for ρ = 0 and an initial value f to the right of
the left switching point. The qualitative features are again well described by the leading-order
heat-kernel approximation.
Fig. 7.21 shows the implied volatility smile for different times to maturity for the same initial
value f = 1.5. Similar to the underlying local volatility model discussed in Sec. 7.1.3, the first-order
heat-kernel approximation to the implied volatility shows a pathological step at the switching point.
The effective-local-volatility scheme does not show this step, but seems otherwise to yield the same
level of accuracy as the heat-kernel expansion. The quantile-averaging procedure works very well for
all times τ although at intermediate times, the asymptotic expansions are slightly better. Note that
we had to increase the number of gridpoints in the K-grid for the one-dimensional finite-difference
solvers in order to avoid small oscillations from the non-analytic switching points.
75

0 1 2 30.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
σ impl
.
0 1 2 30.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 1 2 30.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
K
σ impl
.
0 1 2 30.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
K
Figure 7.21: Implied volatility smile for the the extended 3 regime SABR model with ρ = 0, fL = 1,fR = 6, κ = 0.25, f = 1.5, α = 0.3, ν = 0.5 and different times to maturity τ = 1, 2, 5, 10 fromtop left to bottom right. The color codes are the same as in Fig. 7.17. Note that there is no Haganapproximation for the extended model.
7.2.2.2 ρ 6= 0
For finite correlation ρ, the mixing approach is not applicable by itself. We have seen for ρ = 0 that
the heat-kernel approach fails for the model with 3 regimes and non-analytic switching points between
them. We will thus use the effective-local-volatility scheme to obtain a contravariate correction to
mixing instead of the first-order heat-kernel approximation. Fig. 7.22 shows the time evolution
of the smile for an initial value of f = 1.5 to the right of the first switching point. Here again,
the corrected mixing scheme provides a very good description of the smile for all τ although the
effective-local-volatility scheme is slightly superior at intermediate times to maturity. The leading-
order heat-kernel approximation provides the correct limit for τ → 0, but the first correction term
shows a pathology at the switching point and should therefore not be used. Fig. 7.23 shows the
dependence of the smile on the level of the current rate f . The pathology of the first-order heat-
kernel approximation is strongest for f close to the lower switching point. A similar behaviour
occurs at the upper switching point, but as the effective instantaneous volatility C(f)/f and thus
76

0 1 2 30.1
0.2
0.3
0.4
0.5
σ impl
.
0 1 2 30.1
0.2
0.3
0.4
0.5
0 1 2 30.1
0.2
0.3
0.4
0.5
K
σ impl
.
0 1 2 30.1
0.2
0.3
0.4
0.5
K
Figure 7.22: Implied volatility smile for the extended 3 regime SABR model with ρ = −0.5, and allother parameters and color codes as in Fig. 7.21. The corrected mixing scheme (green line) is nowcorrected by the effective local volatility scheme and not the heat-kernel result (see text).
the effective dimensionless time to maturity is smaller for larger f the pathology is less pronounces
there. The effective-local-volatility scheme produces the correct shape of the smile for all f . For
small f however the overall level of the smile is not described well.
Finally, Fig. 7.24 shows the implied volatility in the extended SABR model with a cubic local-
volatility function. The parameter fc has been chosen such that value C(fc) at the plateau is
identical to the 3 regime model. The qualitative features are very similar to the three regime model
although the details differ in particular at the right wing. Note that the heat-kernel approximation
does not show any pathology for this toy model and can also be used for the contravariate correction
to mixing.
77

0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
σ impl
.
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
σ impl
.
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
K
σ impl
.
0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
K
Figure 7.23: Implied volatility smile for the extended 3 regime SABR model with ρ = −0.5, T = 10for different values of the current rate f = 0.9, 1.1, 4, 5.9, 6.1, 7 from top left to bottom right. Allother parameters and color codes are as in Fig. 7.22.
78

0 2 4 60
0.1
0.2
0.3
0.4
0.5
σ impl
.
0 2 4 60
0.1
0.2
0.3
0.4
0.5
0 2 4 60
0.1
0.2
0.3
0.4
0.5
K
σ impl
.
0 2 4 60
0.1
0.2
0.3
0.4
0.5
K
Figure 7.24: Implied volatility smile for the extended SABR model with a cubic local volatilityfunction C(f) with fc = 3, ρ = −0.5, α = 0.3, ν = 0.5, T = 10 for different values of the currentrate f = 0.5, 1, 3, 5 from top left to bottom right. The mixing scheme (green line) is corrected bythe heat-kernel result. The blue line gives the result of the Hagan formula in Eq. (D.3) with I0 andI1 from Eqs. (D.4) and (D.6).
79

Chapter 8
Conclusions
In this thesis, we have reviewed and extended approximation schemes for the standard SABR model
as well as an extended SABR model for several choices of a general local volatility function C(f).
We have also analyzed the underlying local volatility models in some detail.
We find that asymptotic heat-kernel expansions yield good agreement with numerical solutions
for small to intermediate times to maturity as long as the local volatility function C(f) does not
contain kinks as for a piecewise linear 3 regime model. An effective-local-volatility scheme based on
a very recent proposal by Andreasen and Huge [2] yields the same level of accuracy as the first-order
heat-kernel expansion of the implied volatility. However, it has the advantage to be robust also for a
model with different linear regimes and non-analytic switching points. We extend a mixing scheme
proposed by Barjaktarevich and Rebonato [48] to a general local volatility function by solving the
one-dimensional pricing problem numerically using a finite-difference solver for the forward Dupire
equation. We find that it works remarkably well for ρ = 0 and is best at large times to maturity
τ where asymptotic expansions fail. Even for ρ 6= 0 it can be combined with the asymptotic heat-
kernel or effective-local-volatility expansions using a simple contravariate type of correction. For
the parameter ranges analyzed, we find that this corrected mixing scheme is superior to the other
approximation schemes except for some intermediate ranges of τ , where the asymptotic expansions
are slightly better.
80

Appendix A
Laplace method forone-dimensional integrals
In this appendix, we give a brief summary of the Laplace asymptotic expansion method for one-
dimensional integrals on the real axis as needed in Sec. 3.1.3 to evaluate the expected local volatility
and the marginal density function of the SABR model in the heat-kernel expansion. The Laplace
method is also known as steepest descent method and its generalization to higher dimensions and
functional integrals are the basis for Feynman diagram expansions in theoretical physics. Thus,
consider the integral,
I(λ) =
∫ b
a
f(x)e−λg(x) , (A.1)
where f(x) and g(x) are sufficiently smooth functions of one real variable x. For asymptotically
large real λ the integral will be dominated by values of x around minima of g(x). For simplicity, we
will assume that g(x) has a single minimum at x∗ such that we can expand both f(x) and g(x) in
a Taylor expansion around x∗ yielding,
I(λ) = e−λg(x∗)∞∑
k=0
∫ b
a
f (k)(x∗)
k!(x − x∗)k exp
(
−λ∞∑
l=2
g(l)(x∗)
l!(x− x∗)l
)
dx
=e−λg(x∗)
√λ
∞∑
k=0
∫ yb
ya
f (k)(x∗)
k!
yk
λk2
exp
(
−∞∑
l=3
g(l)(x∗)
l!g(2)(x∗)
yl
λl2
)
e−y2
2 dy . (A.2)
In the second line, we have changed the variable of integration to y = λ(x − x∗) and defined the
shortcuts λ = λg(2)(x∗) as well as ya =√λ(a−x∗) and yb =
√λ(b−x∗). The integrand in Eq. (A.2)
can now be expanded in a series in powers of λ− 12 . The remaining integrals can be calculated
recursively by partial integration,
∫ yb
ya
yne−y2
2 dy = −yn−1e−y2
2
∣∣∣∣
yb
ya
+ (n− 1)
∫ yb
ya
yn−2e−y2
2 dy , (A.3)
and be reduced to the case n = 0 for even n and n = 1 for odd n. Thus in principle, we can evaluate
the integrals exactly in terms of elementary functions and the cumulative normal distribution func-
tion. However, the boundaries of the integral are asymptotically pushed to ±∞ since they contain
81

a factor√λ. Eq. (A.3) shows that the boundaries only yield exponentially small correction terms
which do not contribute to the asymptotic expansion. We will be interested in the case a = 0 and
b = ∞ and thus only need the moments of the Gaussian distribution. For odd n = 2m + 1 the
integrals then vanish whereas for even n = 2m, we have
∫ +∞
−∞y2me−
y2
2 =√
2π(2m− 1) · (2m− 3) · · · · · 3 · 1√
2π =√
2π(2m)!
2mm!. (A.4)
Carefully expanding the integrand in Eq. (A.2) in inverse powers of λ and thereby the prefactor of
the Gaussian exponential in powers of y, we obtain the asymptotic expansion of I(λ) up to the first
two correction terms as follows,
I(λ) =
√
2π
λe−λg(x∗)
[
f0 +1
λ
(f22
− f1g32
− f0g48
+5f0g
23
24
)
(A.5)
+1
λ2
(f48
− 5f3g312
− 5f2g216
− f1g58
− f0g648
+35f0g
24
192
)
+ O(λ−3)
]
,
where we have defined the shortcuts fk = f (k)(x∗) and gk = g(k)(x∗)/g(2)(x∗).
82

Appendix B
Sigma functions
In this appendix, we compile analytical expressions for the two Σ-functions,
Σ(f) =
∫ f dφ
C(φ), Σ(f) =
∫ f [C′(φ)]2
C(φ)dφ , (B.1)
for all choices of C(f) discussed in Eqs. (1.11) to (1.14) of the introduction. These integrals are
needed throughout the thesis in different contexts, in particular for the heat-kernel expansions.
The CEV model and the shifted log-normal model are particular cases of the shifted CEV model
in Eq. (1.13),
C(f) = (f + θ)β . (B.2)
For this choice and 0 ≤ β < 1, the integrals read as,
Σ(f) =(f + θ)1−β
1 − β, Σ−1(q) = [(1 − β)q]
11−β − θ , Σ(f) = − β2
(1 − β)(f + θ)1−β. (B.3)
For β = 1, we have
Σ(f) = Σ(f) = ln(f + θ) , Σ−1(q) = eq − θ , (B.4)
For the three regime model in Eq. (1.12), i.e.
C(f) =
f , f ≤ fL ,fL , fL ≤ f ≤ fR ,
fL + κ(f − fR) , f ≥ fR .(B.5)
the integrals and the inverse can also be calculated analytically. We obtain
Σ(f) =
ln(f/fL) , f ≤ fL ,ffL
− 1 , fL ≤ f ≤ fR ,fRfL
− 1 + 1κ ln
[
1 + κ f−fRfL
]
, f ≥ fR ,
(B.6)
and
Σ−1(q) =
fLeq , q ≤ 0 ,
fL(q + 1) , 0 ≤ q ≤ fR − fL ,
fLκ
[
eκ(q− fR
fL+1) − 1
]
+ fR q ≥ fR − fL ,(B.7)
83

as well as
Σ(f) =
ln(f/fL) , f ≤ fL ,0 , fL ≤ f ≤ fR ,
κ ln[
1 + κ f−fRfL
]
, f ≥ yR .(B.8)
Finally, for the cubic toy model in Eq. (1.14), i.e.
C(f) =fc3
[(f
fc− 1
)3
+ 1
]
, (B.9)
we obtain
Σ(f) = 3
∫ ffc
−1
0
du
1 + u3=
1
2ln
(ffc
)2
(ffc
− 32
)2
+ 34
+√
3
{π
6+ arctan
[2√3
(f
fc− 3
2
)]}
, (B.10)
as well as
Σ(f) = 3
∫ fyc
−1
0
u4
1 + u3du =
3
2
(f
fc− 1
)2
+1
2ln
(ffc
)2
(ffc
− 32
)2
+ 34
−√
3
{π
6+ arctan
[2√3
(f
fc− 3
2
)]}
. (B.11)
The function in Eq. (B.10) does not seem to be invertible in terms of elementary functions.
84

Appendix C
Moments of the exponentialintegral of Brownian motion
In this appendix, we give an elementary derivation of a recursion relation for the moments of the
distribution of total variance as needed in Sec. 4.4. The normalized volatility process follows the
SDE,
dαs = αsdWs , (C.1)
with α0 = 1. The solution of this SDE is well-known to be
αs = e−12 s+Ws , (C.2)
and thus the total variance is given by
As =
∫ s
0
α2s′ds
′ =
∫ s
0
e−s′+2Ws′ds . (C.3)
Note, that in this appendix, we drop the superscript (− 12 ) from the expression for the exponential
integral At of Brownian motion for notational convenience. The expectation of As can now be
expressed as follows,
< As >= E[As|F0] =
∫ s
0
e−s′E[e2Ws′ |F0]ds′ =
∫ s
0
es′ds′ = es − 1 . (C.4)
Here, we have used that E[e2Ws |F0] = e2s. To show this, consider the process Xt = exWt− x2t2 . It is
a Martingale, since by Ito’s Lemma, we have dXt = xdWt, and thus no drift term. Consequently,
we obtain for s1 < s2,
E[ex(Ws2−Ws1 )|Fs1 ] = ex2(s2−s1)
2 . (C.5)
85

In particular for s2 = s and s1 = 0, this yields E[exWs ] = ex2s2 . The second moment of the
distribution is given by
< A2s > =
∫ s
0
ds1
∫ s
0
ds2e−s1−s2E[e2(Ws1+Ws2 )|F0]
= 2
∫ s
0
ds1
∫ s
s1
ds2e−s1−s2E[e4Ws1+2(Ws2−Ws1 )|F0]
= 2
∫ s
0
ds1
∫ s
s1
ds2e−s1−s2E[e4Ws1E[e2(Ws2−Ws1)|Fs1 ]|F0]
= 2
∫ s
0
ds1
∫ s
s1
ds2e−s1−s2e8s1e2(s2−s1)
=1
15e6s − 2
5es +
1
3. (C.6)
For the centralized moment, this yields
< (As− < As >)2 >=< A2s > − < As >
2=1
15e6s − e2s +
8
5es − 2
3. (C.7)
We can now proceed along the same line for higher moments, obtaining
< Ans >= n!
∫ t
0
ds1
∫ t
s1
ds2 . . .
∫ t
sn−1
dsne−
∑ni=1 siE[e2
∑ni=1 Wsi ] . (C.8)
As before, we separate the sum in the exponent into independent increments
n∑
i=1
Wsi =
n−1∑
i=0
(n− i)(Wsi+1 −Wsi ) , (C.9)
where for convenience, we have defined s0 = 0. Thus, taking the expectation value yields
E[e2∑n
i=1 Wsi ] = e2∑n−1
i=0 (n−i)2(si+1−si) = e∑n
i=1[4(n−i)+2]si (C.10)
It is then easily shown by induction, that the remaining integral
In =
∫ t
s
ds1
∫ t
s1
ds2 . . .
∫ t
sn−1
dsne∑n
i=1[4(n−i)+1]si , (C.11)
has a representation of the form
In =n∑
k=0
cn,keakt+(an−ak)s , (C.12)
with ak = 2k2 − k, c1,1 = −c1,0 = 1. The moments can be expressed in terms of these coefficients as
< Ans >= n!
n∑
k=0
cn,keaks . (C.13)
From the induction step, the following recursion relation for the coefficients emerges
cn+1,k = − cn,kan+1 − ak
, k = 0, . . . , n ,
cn+1,n+1 =
n∑
k=0
cn,kan+1 − ak
. (C.14)
86

Starting from c1,1 = −c1,0 = 1, we then obtain for the first few coeefficients,
c2,0 =1
6, c2,1 = −1
5, c2,2 =
1
30, (C.15)
reproducing Eq. (C.6) as well as
c3,0 = − 1
90, c3,1 =
1
70, c3,2 = − 1
270, c3,3 =
1
1890, (C.16)
and thus
< A3s >=
1
315e15s − 1
45e6s +
3
35es − 1
15. (C.17)
Using the binomial formula, we can use this result to obtain the centralized third moment,
< (As− < As >)3 >=< A3s > −3 < A2
s >< As > +2 < As >3 . (C.18)
The result of the algebra is summerized in Eq. (4.22). Note that the normalization of the moments
is such that < (As− < As >)n >= snM(n)c (s).
87

Appendix D
Hagan’s approximation
In this appendix, we give a brief summary of the original asymptotic formulas for the SABR model
derived by Hagan and co-workers for convenient reference. We slightly change the notation for
better comparison with the results presented in this thesis. In the original paper [27], they give the
following formula for the implied volatility as their central result,
σB(f,K) =α
(fK)(1−β)/2{
1 + (1−β)2
24 log2 f/K + (1−β)4
1920 log4 f/K + . . .} · ζ
x(ζ)·
{
1 +
[(1 − β)2
24
α2
(fK)1−β+
1
4
ρβνα
(fK)(1−β)/2+
2 − 3ρ2
24ν2]
τ + . . .
}
, (D.1)
where
ζ =ν
α(fK)(1−β)/2 log f/K , x(z) = log
{√
1 − 2ρz + z2 + z − ρ
1 − ρ
}
. (D.2)
This seems to be the formula most widely used in practice to fit the form of the smile. In intermediate
steps of the derivation, they also give a similar formula in Eq. (B.65) of [27] for a general C(f). Both
formulas are of the form (see also [45]),
σB(f,K) = I0(f,K)[1 + τI1(f,K)] + O(τ2) . (D.3)
For the general C(f), Eq. (B.65) in [27] yields
IH0 (f,K) =ν log f/K
x(ζ)
ζ
z, (D.4)
where
z =ν
α
∫ f
K
df ′
C(f ′), (D.5)
and ζ = να
f−KC(fav)
, with the geometric average fav =√fK, is an approximation of z for small f −K.
As a general first order term, they give
I1(f,K) =2γ2 − γ2
1 + 1/f2av
24α2C2(fav) +
1
4ρναγ1C(fav) +
2 − 3ρ2
24ν2 , (D.6)
where γ1 = C′(fav)/C(fav) and γ2 = C′′(fav)/C(fav).
88

Comparing with the heat-kernel approximation, we recognize z = να∆Σ and |x(z)| = dmin/
√2
as the minimal geodesic distance. However, the prefactor of the heat-kernel result for the implied
volatility differs from Eq. (D.4) and in their notation reads as
Ihk0 (f,K) =ν log f/K
x(z). (D.7)
Ob loj [45] has pointed out this inconsistency and showed that using Eq. (D.7) instead of Eq. (D.4)
improves the degeneracy of the Hagan approximation for very low strikes. By using the approximate
ζ instead of z, an approximation for small moneyness is introduced. Also, in Eq. (D.1) an additional
expansion of z close to the at-the-money point is used. Thus, the Hagan approximation is effectively
a double expansion in time to maturity τ and moneyness. Note also, that it is somewhat inconsistent
to use log f/K and powers of K in the same formulas as the first imply an expansion in moneyness.
In a later paper [28], Hagan et al. also give an explicit formula for the effective local (normal)
volatility, which in our notation reads as
Ceff.(K) = αC(K)
[
1 +α3C′(f)[ρ cosh(dmin/
√2) − sinh(dmin/
√2)]
α2αC′(f)dmin/√
2 + 2√
1 − ρ2α2νν2τ + . . .
]
. (D.8)
This should be compared to Eq. (3.115), the correction term proportional to τ does however not seem
to agree. Also, they erroneously state that their result is a ’refinement of the original expression for
the implied volatility’ whereas their calculations suggest that the quantity is in fact a local volatility.
89

References
[1] M. Abramowitz and I.A. Stegun. Handbook of mathematical functions with formulas,
graphs, and mathematical tables, 55. Dover publications, 1964.
[2] J. Andreasen and B. Huge. Zabr–expansions for the masses. http://ssrn.com/abstract=
1980726, 2012.
[3] F. Antonelli and S. Scarlatti. Pricing options under stochastic volatility: a power series
approach. Finance Stoch., 13:269–303, 2009.
[4] M. Avellaneda. From sabr to geodesics. Presentation available at https://www.math.nyu.edu/
faculty/avellane/Lecture12Quant.pdf, 2009.
[5] I. G. Avramidi. Analytic and geometric methods for heat kernel applications in finance.
http://infohost.nmt.edu/ iavramid/notes/hkt/hktutorial13.pdf, 2007.
[6] B. Bartlett. Hedging under sabr model. Wilmott Magazine, pages 2–4, 2006.
[7] S. Benaim, P. Friz, and R. Lee. On the black-scholes implied volatility at extreme strikes.
Frontiers in Quantitative Finance, pages 19–45, 2008.
[8] H. Berestycki, J. Busca, and I. Florent. Asymptotics and calibration of local volatility
models. Quantitative finance, 2(1):61–69, 2002.
[9] H. Berestycki, J. Busca, and I. Florent. Computing the implied volatility in stochastic
volatility models. Comm. Pure Appl. Math., 57(10):1352–1373, 2004.
[10] F. Black. The pricing of commodity contracts. J. of Financial Economics, 3:167–179, 1976.
[11] F. Black and M. Scholes. The pricing of options and corporate liabilities. Journal of
Political Economy, 81:631–659, 1973.
[12] M. Broadie and O. Kaya. Exact simulation of stochastic volatility and other affine jump
diffusion processes. Operations Research, pages 217–231, 2006.
[13] Sean M. Carroll. Lecture notes on general relativity. arXiv:gr-qc/9712019, 1997.
90

[14] B. Chen, C.W. Oosterlee, and J.A.M. Weide. A low-bias simulation scheme for the sabr
stochastic volatility model. International Journal of Theoretical and Applied Finance, 2012.
[15] J.C. Cox and S.A. Ross. The valuation of options for alternative stochastic processes. Journal
of financial economics, 3(1):145–166, 1976.
[16] E. Derman and I. Kani. Riding on a smile. Risk, pages 277–284, 1994.
[17] D. Duffie and P. Glynn. Efficient monte carlo simulation of security prices. The Annals of
Applied Probability, 5(4):897–905, 1995.
[18] B. Dupire. Pricing with a smile. Risk, 7:18–20, 1994.
[19] M. Forde. Exact pricing and large-time asymptotics for the modified sabr model and the
brownian exponential functional. Int. J. Theor. Appl. Fin., 14:119, 2011.
[20] M. Forde. Stocvol smile toolpack documentation: a survey of asymptotic results for
stochastic volatility and exponential levy models. Available at http://webpages.dcu.ie/ for-
dem/research/FormulaSheet.pdf, 2011.
[21] M. Forde and A. Pogudin. The large-maturity smile for the sabr and cev-heston models,
2011.
[22] J.-P. Fouque, G. Papanicolaou, K.R. Sircar, and K. Solna. Singular perturbations in
option pricing. SIAM J. Appl. Math., 63(5):1648–1665, 2003.
[23] J.P. Fouque, G. Papanicolaou, and K.R. Sircar. Mean-reverting stochastic volatility.
International Journal of Theoretical and Applied Finance, 3(1):101–142, 2000.
[24] J.P. Fouque, G. Papanicolaou, R. Sircar, K. Solna, et al. Multiscale stochastic
volatility asymptotics. Multiscale Modeling and Simulation, 2:22–42, 2004.
[25] J. Gatheral, E.P. Hsu, P. Laurence, C. Ouyang, and T.H. Wang. Asymptotics of
implied volatility in local volatility models. Mathematical Finance, 2010.
[26] N. de Guillaume, R. Rebonato, and A. Pogudin. The nature of the dependence of the
magnitude of rate moves on the level of rates: A universal relationship. preprint, November
2010.
[27] P. S. Hagan, D. Kumar, A. S. Lesniewski, and D. E. Woodward. Managing smile risk.
Willmott Magazine, pages 84–108, July 2002.
[28] P.S. Hagan, A.S. Lesniewski, and D.E. Woodward. Probability distribution in the sabr
model of stochastic volatility. preprint, March 2005.
91

[29] P.S. Hagan and D.E. Woodward. Equivalent black volatilities. Applied mathematical
Finance, 6:147–157, 1999.
[30] P. Henry-Labordere. A general asymptotic implied volatility for stochastic volatility models.
Available at SSRN: http://ssrn. com/abstract/698601, 2005.
[31] P. Henry-Labordere. Solvable local and stochastic volatility models: Supersymmetric meth-
ods in option pricing. arXiv:cond-mat/0511028, 2005.
[32] P. Henry-Labordere. Unifying the bgm and sabr models: A short ride in hyperbolic geom-
etry. arXiv:cond-mat/0504317, 2005.
[33] S. Heston. A closed-form solution for options with stochastic volatility with applications to
bond and currency options. Review Financ. Stud., 6:327–343, 1993.
[34] J. Hull and A. White. The pricing of options on assets with stochastic volatilities. Journal
of Finance, pages 281–300, 1987.
[35] A. Q. M. Khaliq and E. H. Twizell. L0-stable splitting methods for the simple heat
equation in two space dimensions with homogeneous boundary conditions. SIAM journal on
numerical analysis, pages 473–484, 1986.
[36] T. Kluge. Pricing derivatives in stochastic volatility models using the finite difference method.
Thesis, Technische Universitat Chemnitz, Fakultat fur Mathematik, 2002.
[37] A. Lesniewski. Wkb method for swaption smile. Courant Institute Lecture, available at
http://lesniewski.us/papers/presentations/Courant020702.pdf, 2002.
[38] A. Lesniewski. The uses of differential geometry in finance. Bloomberg, available at
http://lesniewski.us/papers/presentations/Bloomberg112505.pdf, November 2005.
[39] A. Lewis. Geometries and smile asymptotics for a class of stochastic volatility models.
www.optioncity.net, 2007.
[40] A. L. Lewis. Option valuation under stochastic volatility. Finance press, 2000.
[41] A. Lindsay and D. Brecher. Results on the CEV Process, Past and Present. SSRN eLibrary,
2010.
[42] R. Lord, R. Koekkoek, and D. Van Dijk. A comparison of biased simulation schemes for
stochastic volatility models. Quantitative Finance, 10(2):177–194, 2010.
[43] H. Matsumoto and M. Yor. Exponential functionals of brownian motion, i: Probability
laws at fixed time. Probability Surveys, 2:312–347, 2005.
92

[44] R.C. Merton. Theory of rational option pricing. The Bell Journal of Economics and Man-
agement Science, 4(1):141–183, 1973.
[45] J. Ob loj. Fine tune your smile, correction to hagan et al. arXiv:0708.0998, 2008.
[46] L. Paulot. Asymptotic implied volatility at the second order with application to the sabr
model. Order, 2:20, 2009.
[47] R. Rebonato. Which process gives rise to the observed dependence of swaption implied
volatilities on the underlying? Intern. J. of Theor. and Appl. Finance, 6(4):419–442, 2003.
[48] R. Rebonato and J. P. Barjaktarevic. Improving on the hagan expansion, presentation
slides. private communication, 2011.
[49] R. Rebonato and J. Chen. Evidence for state transition and altered serial codependence in
us $ interest rates. Quantitative Finance, 9(3):259–278, 2009.
[50] R. Rebonato and D. Kainth. A two-regime stochastic-volatility extension of the libor market
model. Intern. J. of Theoretical and Applied Finance, 7(5):555–576, 2004.
[51] R. Rebonato, K. McKay, and R. White. The SABR/LIBOR Market Model. Wiley, 2009.
[52] M. Schroder. Computing the constant elasticity of variance option pricing formula. Journal
of Finance, pages 211–219, 1989.
[53] R. Sheppard. Pricing equity derivatives under stochastic volatility: A partial differential equa-
tion approach. PhD thesis, Faculty of Science, University of the Witwatersrand, 2007.
[54] S.E. Shreve. Stochastic calculus for finance: Continuous-time models, 2. Springer, 2004.
[55] S.M. Taylor. Explicit density approximations for local volatility models using heat kernel
expansions. preprint available at http://ssrn.com/abstract=1800415, 2011.
[56] S.R.S. Varadhan. Diffusion processes in a small time interval. Communications on Pure and
Applied Mathematics, 20(4):659–685, 1967.
[57] S.R.S. Varadhan. On the behavior of the fundamental solution of the heat equation with
variable coefficients. Communications on Pure and Applied Mathematics, 20(2):431–455, 1967.
[58] D.V. Vassilevich. Heat kernel expansion: user’s manual. Physics reports, 388(5-6):279–360,
2003.
[59] NN Yanenko. A difference method of solution in the case of the multidimensional equation
of heat conduction. In Dokl. Akad. Nauk SSSR, 125, pages 1207–1210, 1959.
93