Embed Size (px)
Citation preview
Research ArticleApplication of Artificial Neural Networks toCalculation of Oil Film Reaction Forces and Dynamics ofRotors on Journal Bearings
Alexey V Kornaev1 Nickolay V Kornaev2 Elena P Kornaeva3 and Leonid A Savin2
1Modeling of Hydromechanical Systems Research LaboratoryTheOrel State University Named after IS Turgenev Orel 302026 Russia2Department ofMechatronics and International EngineeringTheOrel State University Named after IS Turgenev Orel 302026 Russia3Department of Information Systems The Orel State University Named after IS Turgenev Orel 302026 Russia
Correspondence should be addressed to Alexey V Kornaev rusakorinboxru
Received 24 February 2017 Revised 22 April 2017 Accepted 22 May 2017 Published 4 July 2017
Academic Editor Fadi Dohnal
Copyright copy 2017 Alexey V Kornaev et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Increase of energy efficiency and level of information system development of rotor machines in general requires improvement oftheoretical approaches to research In the present paper the problem of high-precision and high-performance computing programsdevelopment has been considered to simulate rotor vibrations Based on two-layer feed-forward neural networks numericalmodelshave been developed to calculate oil film reaction forces to solve the rotor dynamics problems Comparison has been done of linearand nonlinear approaches to solution of rotor dynamics problems and a qualitative evaluation has been presented of accuracy andperformance of a neural network approach compared to conventional approaches to rotor dynamics
1 Introduction
Dynamic behavior of a rotating shaft on journal bearingsis defined by the resonance vibration at critical speedsself-excited vibrations due to the internal damping of theshaftrsquos material self-excited vibrations due to the oil film ofjournal bearings oil whip and flow-induced vibrations [1ndash4]Since the authors are closely connected with hydrodynamiclubrication this paper is dedicated to oil whirl and oilwhip problems Oil film forces are obtained by means ofsolving the hydrodynamics equations and depend on manydesign and operational parameters of a bearing as well ason various specific physical effects that may occur such asvibration cavitation and turbulence [2 4 5] The numberof input parameters can reach several dozen [6] At thesame time development of technology in the direction ofinformatization requires simultaneous increase of accuracyand performance of the numerical models One of thepossibleways to provide both accuracy and high performanceis using deterministic and stochastic approaches tomodelingNowadays the methods and resources of implementation of
neural network algorithms are developing quite intensivelywhich based on the known data about the subject of studyallows building multifactor models of input and outputparameters relations Three basic levels of developed modelscould be distinguished
Models of the first level have no direct interaction withthe rotating machine their training is based on the givennumerical or experimental data In [7] the results of studyof an elastic rotorrsquos dynamics on rigid bearings have beenpresented Neural networks that have been applied are feed-forward with two hidden layers High accuracy has beendemonstrated formodels of rotor systemswith roller-elementbearings based on neural networks accuracy from 82 upto 100 has been presented Dynamics has been studiedin a certain range of speed and for every case of speedseparately so the neural network had to be retrained Someworks are known where neural network models are used tocalculate the distributed characteristics for example pressuredistribution in the oil film of the journal bearings [8 9]It should be noted that application of stochastic methodsof rotor dynamics modeling allows skipping the stage of
HindawiInternational Journal of Rotating MachineryVolume 2017 Article ID 9196701 11 pageshttpsdoiorg10115520179196701
2 International Journal of Rotating Machinery
distributed values calculation Instead one could instantlydetermine the components of a resulting oil film force In [10]dynamics of an imbalanced rigid rotor on fluid-film bearingshas been studied Authors determined the relation betweenthree kinematic characteristics and two components of theresulting oil film force using a model of a neural networkThe numerical tests were carried out for various angularspeed and allowed determination of rotor trajectories Thesynchronous periodic quasiperiodic and chaotic motionsfor rotation speed within the range from 1000 to 10000 rpmwere presented as the results of calculation The authorssuggest that there is a limitation to using linearized modelsin solving the problems of dynamics however they do notpresent a quantitative comparison of the numerical resultsobtained using linear and nonlinear models Moreover thereduction of the number of input variables has been doneaccording to Poincare transformation of Reynolds equationbut possible outcomes of such substitutionwere not discussedin the paper It is also not quite clear how one introducedkinematic variable allowed accounting for three given vari-ables (two projections of rotorrsquos lateral vibration speed andits rotating speed) It could be that the neural network had tobe retrained for every particular case of the rotating speedSo the results of this indeed interesting and important workremain in need of additional verification A number of quiteperspective papers should also be highlighted where neuralnetwork algorithms are used to account for complex specificphenomena [5 11] and to optimize the operational conditionsof fluid-film bearings [12] Models of higher level can learnin real time using the processed measurement data One ofthe most popular applications of such models is using neuralnetworks to flaw detection of bearings in rotor machines[13ndash16] In [17] authors investigate the inverse model ofthe squeeze-film damper bearing (force inputdisplacementoutput) from empirical data and its application to a nonlinearinverse rotor-bearing problem Comparison of experimentaland numerical data showed high accuracy of themodel basedon recurrent neural networks Models of highest level ofcomplexity are able to generate some control impact [18 19]Today such approach is used to solve the problems of controlin magnetic bearings [20ndash22] It should be however notedthat the values of clearance in such bearings are an order ofmagnitude more than the same value in fluid-film bearings
The present paper considers development of neuralnetwork algorithms of first level that is models with nodirect contact to the rotor machine Matters of quantitativeevaluation of accuracy of application of neural network incomparison to known methods of oil film forces calculationand applicability of neural networks during simulation ofnonlinear self-excited oscillationsmdashoil whipmdashand duringsimulation of transient regimes of rotorrsquos operation have beenconsidered
2 Mathematical Model
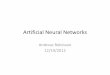
A rigid symmetrical imbalanced rotor is considered Bothends of the rotor are supported by journal bearings of thesame specification (see Figure 1) Given the chosen directionof coordinate axes the pressure distribution and the resulting
X1
O휔
x3
X3
X2
x1
x2
ℎ(x1)
O1(Xi)
Figure 1 Calculation diagram of a journal bearing
oil film force can be determined by means of numericallysolving the Reynolds equation for a case of an isothermal flowof a viscous incompressible fluid [6]
1205971205971199091 [ℎ3120583 1205971199011205971199091] +
1205971205971199093 [ℎ3120583 1205971199011205971199093] = 6
1205971205971199091 (1199061ℎ) + 121199062 (1)
where ℎ = ℎ(1199091) is the oil film thickness (radial gap)function 120583 is the dynamic viscosity coefficient (assumed tobe constant) 119901 = 119901(1199091 1199093) is the pressure function and 119906119894 =119906119894(1199091) is accordingly the tangential and normal componentsof the journalrsquos surface velocity 119894 = 1 2
Radial gap function ℎ(1199091) could be determined geo-metrically (see Figure 1) (coordinates and velocities of thecenter of the rotor are indicated with the capital letters whilethe coordinates and the velocities of the fluid medium areindicated with the lower case letters)
ℎ (1199091) = ℎ0 minus 1198831 sin (120572) minus 1198832 cos (120572) (2)
where ℎ0 is the mean oil film thickness (1198831 1198832) are coordi-nates of the center of the journal 120572 = 21199091119863 is the angularcoordinate and119863 is the bearingrsquos diameter
The values of 119906119894 over the surface of the journal could bedetermined using the following kinematic relations
1199061 = 1205961198632 + 1198811 cos (120572) minus 1198812 sin (120572) 1199062 = 1198811 sin (120572) + 1198812 cos (120572)
(3)
where 120596 is angular speed of the rotor and (1198811 1198812) areprojections of the velocity vector of the center of the rotor
Calculation of pressure distribution 119901(1199091 1199093) at somespecific point in time is a boundary problem of solutionof Reynolds equation (1) considering (2) and (3) with thefollowing boundary conditions the pressure on each side of
International Journal of Rotating Machinery 3
the bearing is known to be 119901(1199091 0) = 1199010 and 119901(1199091 1198713) =1199011 along the 1199091 direction the following condition has to bemet 119901(0 1199093) = 119901(120587119863 1199093) 1205971199011205971199091|1199091=0 = 1205971199011205971199091|1199091=120587119863Additionally Gumbelrsquos boundary condition for film ruptureis used [6 23]
Given the pressure distribution the components of theresulting oil film reaction force can be obtained as projectionson the119883119894 (see Figure 1)
1198771 = minusint11987130int1205871198630
119901 (1199091 1199093) cos (120572) 119889119909111988911990931198772 = minusint1198713
0int1205871198630
119901 (1199091 1199093) sin (120572) 11988911990911198891199093(4)
where 1198713 is the length of the bearingThe equation for lateral vibrations of the rotorrsquos center can
be presented in simple form [1ndash4 6]
119898119889119889119905 = + (5)
where 119898 is the mass of the rotor per one bearing 119905 is time = 119898Δ1205962 [ cos120596119905sin120596119905 ] + 119898 [ 0minus119892 ] is the bearing load (centrifugaland inertia forces) 119898Δ is the rotorrsquos imbalance and 119892 is freefall acceleration
Oscillationsrsquo velocity of the rotor is significantly lessthan tangential velocity of journalrsquos surface 1205961198632 so thesolution of (5) is linked to solution of the steady-statefluidrsquos flow problem solution So time as variable couldbe neglected during calculation of oil film force (4) Thissignificantly simplifies the procedure of numerical solution ofrotor dynamics problems [1 6] Three basic approaches havebeen considered and are characterized by different methodsof oil film forces determination
The first approach called trajectory method [1ndash4 6] isbased on solution of Reynolds equation (1) followed by inte-gration of pressure distribution and determination of 119877119894 (4)Such approach is considered referential due to high precisionand however has low performance in computational termssince the Reynolds equation has to be solved at each time step
The second approach called the method of linearizationof the oil film force determination [1ndash4 6] is based on thedecomposition of reaction force components 119877119894 into theTaylor series in the proximity of the equilibrium position119883119864119894 The matrices of stiffness 119870 and damping 119861 calculated in theequilibrium position shall be introduced as follows
119870119894119895 = minus 120597119877119894120597119883119895 119861119894119895 = minus120597119877119894120597119881119895
(6)
Then the motion equation of the rotor (5) with givenoperational conditions of the rotor system and given the
linearization of the filmrsquos reaction forces will be as follows [1ndash4 6 24]
119898[[[[
11988911988111198891199051198891198812119889119905]]]]= [11987711986411198771198642] minus [
11987011 1198701211987021 11987022] sdot [1198831 minus 11988311986411198832 minus 1198831198642]
minus [11986111 1198611211986121 11986122] sdot [11988111198812] + 119898Δ1205962 [
cos120596119905sin120596119905]
+ 119898[ 0minus119892]
(7)
The equilibrium point 119883119864119894 can be determined using thetrajectory approach In many practical applications the equi-librium locus curve is calculated to solve problems of rotordynamics [1ndash4 6]The points on this curve correspond to theequilibrium positions at various rotational speeds Necessityto determine the equilibrium position or the equilibriumlocus curve complicates the method of linearization
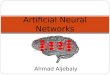
The third approach is based on a neural network programmodule to approximate the oil film forcersquos components119877119894 andto solve (5) A two-layer feed-forward neural network withinputs 119880119896 (119896 = 1 119873inp) and outputs 119884119894 (119894 = 1 119873out)is used (see Figure 2) The functionality of the network isdetermined by specifying the strengths of the connectionscalledweights119908 and the neuron transfer function119891 [25]Themathematical model of the used neural network is
119884119894 = 119891out(119873hidsum119895=1
119908out119894119895 119911119895 + 119887out)
119911119895 = 119891hid(119873inpsum119896=1
119908hid119895119896119880119896 + 119887hid)
(8)
where 119891out(119909) = 119909 is a linear transfer function and 119891hid(119909) =minus1 + 2(1 + exp(minus2119909)) is a sigmoid symmetric transfer func-tion 119908out
119894119895 and 119908hid119895119896 are weights 119887out and 119887hid are thresholds
of output and hidden layers respectively and 119911119895 are theintermediate outputs of hidden neurons (119895 = 1 119873hid)
In the present paper the components of the oil film force119884119894 = 119877119894 are considered as outputs and four or five kinematicvalues depending on the problem are considered inputs = [1198831 1198832 1198811 1198812] or = [119899 1198831 1198832 1198811 1198812] where 119899 isthe rotorrsquos speed
Neural network learning is essentially the solution ofoptimization problem of a minimum of the mean squarederror function search
MSE = 1119876119873outsum119894=1
( 119876sum119902=1
(119884119902119894 minus 119902119894 )2) 997904rArr min (9)
where119876 is a number of samples of inputs and outputs and 119902119894is the target value of an 119894th output in the 119902th sample
The mean squared error function (9) is the functionof a number of variables 119908out
119894119895 and 119908hid119895119896 The search for an
4 International Journal of Rotating Machinery
Input Hidden layer Output layer Output
w
b
+w
b
+U Y
Ninp Nhid Nout
Figure 2 Feed-forward neural network with119873inp number of inputs with119873hid neurons in hidden layer and with119873out outputs
extremum of such function is implemented numerically Oneof the criteria of neural networkrsquos quality is the correlationcoefficient between outputs and targets 119903119884 [26] Target data119894 in the present paper is based on the numerical resultsobtained using the trajectory approach
Stability analysis of the obtained results could be imple-mented based on the rotorrsquos locus analysis using Poincaremaps [10 27ndash29] Moreover the RouthndashHurwitz criterioncould be applied to the linearization approach [1 10]
3 Simulation Results
Three basic approaches have been considered and character-ized by differentmethods of oil film forces determination thetrajectory method the linearization method and the neuralnetwork method Numerical solution of Reynolds equation(1) was implemented using the finite difference method Theobtained set of linear equations was solved using the Gaussmethod [30] The Levenberg-Marquardt backpropagationalgorithm was used in training neural networks [25 3132] which in its turn was based on the numerical resultsobtained using the trajectory method The rotor dynamicscalculation program was based on the numerical solution of(5) or (7) using the explicit Runge-Kutta method of 4th and5th order [30] During the development of the programs theGNU-Octave software and Octaversquos Neural Network Package[31] have been used The GNU-Octave products are freesoftware and use the Matlab compatible language Duringsimulations a PC with following characteristics has beenused Intel Core i5-4690K CPU 35GHz RAM 12GB x64OS
The results presented below correspond to various typesof problems solved
31 Rotor Dynamics with Fixed Speed and Low VibrationsA rotor system with the following parameters has beensubjected to the study rotor with 821 kg mass rotates ata constant speed of 4000 rpm under the load 119898119892 andcentrifugal force 18119898119892 and is supported by two plain journalfluid-film bearings with 40mm diameter and 20mm lengthwith amean radial gap of 100120583m lubricant ismineral oil withdynamic viscosity of 13mPasdots the pressure on each side of thebearing is 01MPa
First trajectory approach has been applied A preliminarynumerical test neglecting the centrifugal force successfully
0 200 400 600 800 1000
Mea
n sq
uare
d er
ror (
N)
Epoch
TrainValidation
TestBest
100
10minus1
10minus2
10minus3
10minus4
Figure 3 Mean squared error
converged to the equilibrium point 119864 = [ minus694 318 ] 120583mNext linearization approach was used
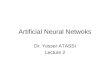
Then a neural network has been developed for trainingwith a number of neurons in the hidden layer 119873hid = 15As the input data a matrix of 4 times 105 elements was usedwhich consisted of numerical values of the coordinates 119883119894and the velocities 119881119894 with 1199050 = 1 s calculated time ofrotorrsquos motion The target data matrix of 2 times 105 elementsconsisted of the numerical values of oil film forces 119877119894 Thematrices of input and output data were divided into threegroups for training validation and testing in fractions 06 03and 01 respectively The procedure of adjustment has beenimplemented using application software [31] Training wasdone in 100 iterations so-called epochs [25] in approximately10minutesThe convergence graph of amean squared error ofthe network during training is presented in Figure 3 Trainingquality of a neural network is characterized by the followingvalues of the mean squared errorrsquos value and correlationcoefficients MSE = 75 sdot 10minus4N 119903119884 = 99999 sdot 10minus1
The numerical tests for comparative calculation of therotorrsquos trajectories have been carried out for various values of
International Journal of Rotating Machinery 5
Time t (s)
Calc
ulat
ion
time
T (s
)
Real timeTrajectory approach
Linearization approachNeural network approach
100
100
101
102
10minus1
Figure 4 Calculation time
the relative centrifugal force 119865119888 = 119898Δ1205962119898119892 = Δ1205962119892 Otherinput parameters remained as during the training procedure
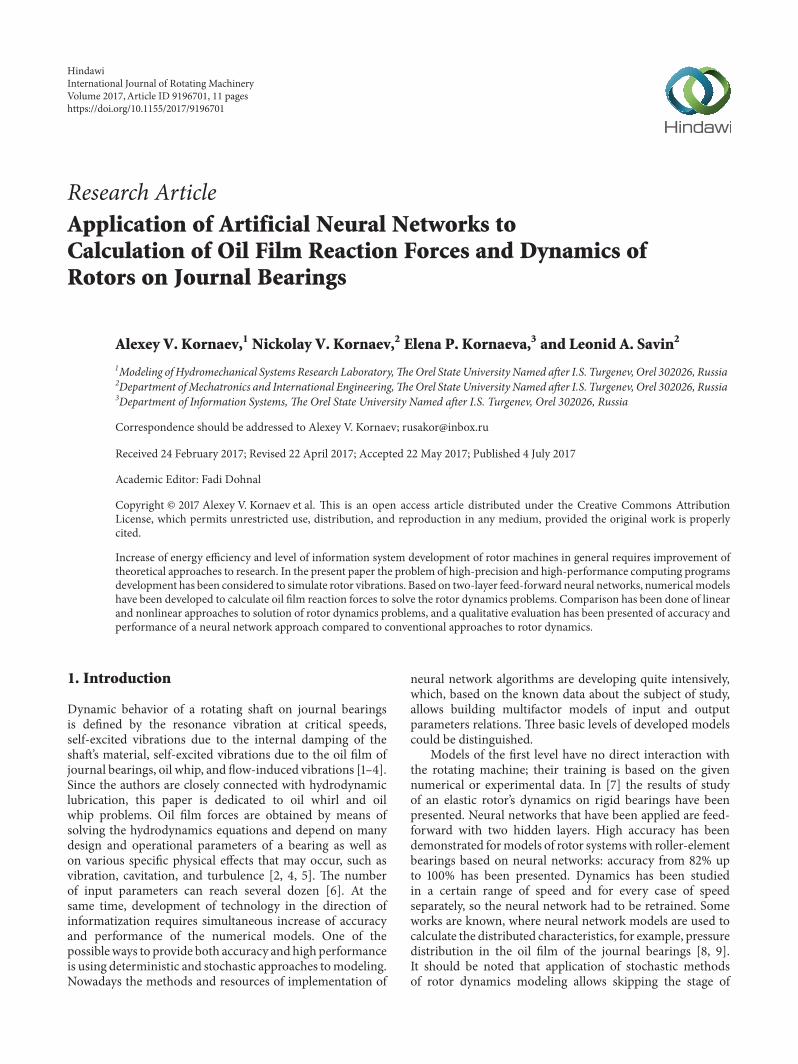
As a result of numerical tests a calculation time of1 sec of rotor motion was determined given the action ofdimensionless centrifugal force Δ1205962119892 = 16 (see Figure 4)It could be seen that the calculation time of rotor dynamicscalculation using the linearization approach is the least inthe whole range Application of the neural network moduleincreased the machine time up to 15ndash2 times under givenconditions Application of trajectory approach increased thecalculation time up to 60ndash90 times compared to the lineariza-tion approach It is indicative that calculation time of rotordynamics using linearization approach and neural networkapproach is faster than the flow of real time in the wholerange This fact means that the application of linearizationor neural network approaches in a real rotational machinecontrol system would make it possible to obtain results ofprognostic modeling [20 33 34]
As a result of another series of numerical tests the tra-jectories have been calculated for a dimensionless centrifugalforce Δ1205962119892 = 08 25 (see Figure 5) Calculated rotormotionrsquos time was set to 1 sec The simulation started atthe equilibrium point 119883119864119894 the trajectory approach taken asreferential The relative error of calculation has been chosenas quantitative criteria of accuracy evaluation
120575119883119894 = 119883Traj119894 minus 119883Lin(NN)
119894ℎ0 sdot 100 (10)
where 119883Traj119894 are coordinates obtained using the trajectory
approach and 119883Lin(NN)119894 are coordinates obtained using the
linearization or neural network approach 119894 = 1 2
The quality analysis of stability of calculated trajectorieshas been implemented based on the Poincare maps [27ndash29] The point were displayed at moments of time that weremultiples of the period of rotation of the rotor 119879 = 1119899It could be seen from the Poincare maps (see Figure 5)that in the given range of loads the rotorrsquos trajectoriesare quasiperiodic This results from the fact that after ashort transient process the trajectoryrsquos mapping becomesa dense pointed line which closes if the calculation timeincreases by 100 times or more This shows the presence ofincommensurable frequencies in the oscillations while themotion is not chaotic [27] It could also be seen from theFigure 5 that all three approaches to calculation of reactionforces gave the same result The relative error of the centerof mass location calculation with Δ1205962119892 = 08 during steady-state regimewas 04 and 03 for the linearization approachand the neural network approach respectivelyWithΔ1205962119892 =16 the relative error remains small but accuracy differs by10 times 03 and 3 for the linearization approach andthe neural network approach respectively Preservation ofaccuracy of the neural network approach could be explainedby the fact that the model of training was carried out withvalue of the dimensionless centrifugal force Δ1205962119892 = 18close to 16 Finally with Δ1205962119892 = 25 the error was no morethan 2 for the neural network approach and no more than6 for the linearization approach So the neural networkapproach compared to the linearization approach given thatthe amplitude of oscillations is more than 01ℎ0 has beenproven to be significantly more accurate
Further increase of the imbalance was not studied as itusually results in unstable trajectories Increase of imbalanceleads to increase of vibrationrsquos amplitude That is why thelinearization method could give inadequate results due toactual nonlinearity of the reaction forces at large eccentric-ities The neural network approach gives good interpolationresults that is within the learning sample During extrapo-lation deviation from the learning conditions could lead tounpredictable results and rapid increase of the error
32 Rotor Dynamics for Various Speed Regimes and Transitionfrom Low to High Vibrations The same rotor system as inSection 31 of the present paper has been studied Imbalancewas constant 119898Δ = 10minus4 kgsdotm and tests were run forvarious rotation speeds 1000 rpm 3000 rpm 5000 rpm and7000 rpm
The first series of simulations of rotorrsquos behavior atvarious rotation speeds was implemented using the trajectoryapproach Calculated motion time was set to 1 sec Apartfrom trajectories the location of equilibrium points has beendetermined marked ldquo+rdquo in Figure 6(a) The second seriesof simulations has been implemented using the linearizationapproach For that matrices of stiffness and damping havebeen determined at four points on the equilibrium locuscurve
Then four neural networks have been developed fortrainingwith119873hid = 15neurons in the hidden layer For everynetwork matrices = [1198831 1198832 1198811 1198812] and = [1198771 1198772] of4 times 104 and 2 times 104 elements were used as input and output
6 International Journal of Rotating Machinery
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 08
Relative load Δ middot 휔2g = 16
훿X
1(
)훿X
1(
)
훿X
2(
)훿X
2(
)X
2(휇
m)
X2
(휇m
)
X1 (휇m)
X1 (휇m)
210
240
270
180
minus74 minus73 minus72 minus71 minus7020
22
24
26
28
0 005 01 015 02minus1
0
1
t (s) t (s)
t (s) t (s)
0 005 01 015 02minus1
0
1
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
10
20
30
0 005 01 015 02minus5
0
5
0 005 01 015 02minus10
0
10
Figure 5 Continued
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Rotating Machinery
distributed values calculation Instead one could instantlydetermine the components of a resulting oil film force In [10]dynamics of an imbalanced rigid rotor on fluid-film bearingshas been studied Authors determined the relation betweenthree kinematic characteristics and two components of theresulting oil film force using a model of a neural networkThe numerical tests were carried out for various angularspeed and allowed determination of rotor trajectories Thesynchronous periodic quasiperiodic and chaotic motionsfor rotation speed within the range from 1000 to 10000 rpmwere presented as the results of calculation The authorssuggest that there is a limitation to using linearized modelsin solving the problems of dynamics however they do notpresent a quantitative comparison of the numerical resultsobtained using linear and nonlinear models Moreover thereduction of the number of input variables has been doneaccording to Poincare transformation of Reynolds equationbut possible outcomes of such substitutionwere not discussedin the paper It is also not quite clear how one introducedkinematic variable allowed accounting for three given vari-ables (two projections of rotorrsquos lateral vibration speed andits rotating speed) It could be that the neural network had tobe retrained for every particular case of the rotating speedSo the results of this indeed interesting and important workremain in need of additional verification A number of quiteperspective papers should also be highlighted where neuralnetwork algorithms are used to account for complex specificphenomena [5 11] and to optimize the operational conditionsof fluid-film bearings [12] Models of higher level can learnin real time using the processed measurement data One ofthe most popular applications of such models is using neuralnetworks to flaw detection of bearings in rotor machines[13ndash16] In [17] authors investigate the inverse model ofthe squeeze-film damper bearing (force inputdisplacementoutput) from empirical data and its application to a nonlinearinverse rotor-bearing problem Comparison of experimentaland numerical data showed high accuracy of themodel basedon recurrent neural networks Models of highest level ofcomplexity are able to generate some control impact [18 19]Today such approach is used to solve the problems of controlin magnetic bearings [20ndash22] It should be however notedthat the values of clearance in such bearings are an order ofmagnitude more than the same value in fluid-film bearings
The present paper considers development of neuralnetwork algorithms of first level that is models with nodirect contact to the rotor machine Matters of quantitativeevaluation of accuracy of application of neural network incomparison to known methods of oil film forces calculationand applicability of neural networks during simulation ofnonlinear self-excited oscillationsmdashoil whipmdashand duringsimulation of transient regimes of rotorrsquos operation have beenconsidered
2 Mathematical Model
A rigid symmetrical imbalanced rotor is considered Bothends of the rotor are supported by journal bearings of thesame specification (see Figure 1) Given the chosen directionof coordinate axes the pressure distribution and the resulting
X1
O휔
x3
X3
X2
x1
x2
ℎ(x1)
O1(Xi)
Figure 1 Calculation diagram of a journal bearing
oil film force can be determined by means of numericallysolving the Reynolds equation for a case of an isothermal flowof a viscous incompressible fluid [6]
1205971205971199091 [ℎ3120583 1205971199011205971199091] +
1205971205971199093 [ℎ3120583 1205971199011205971199093] = 6
1205971205971199091 (1199061ℎ) + 121199062 (1)
where ℎ = ℎ(1199091) is the oil film thickness (radial gap)function 120583 is the dynamic viscosity coefficient (assumed tobe constant) 119901 = 119901(1199091 1199093) is the pressure function and 119906119894 =119906119894(1199091) is accordingly the tangential and normal componentsof the journalrsquos surface velocity 119894 = 1 2
Radial gap function ℎ(1199091) could be determined geo-metrically (see Figure 1) (coordinates and velocities of thecenter of the rotor are indicated with the capital letters whilethe coordinates and the velocities of the fluid medium areindicated with the lower case letters)
ℎ (1199091) = ℎ0 minus 1198831 sin (120572) minus 1198832 cos (120572) (2)
where ℎ0 is the mean oil film thickness (1198831 1198832) are coordi-nates of the center of the journal 120572 = 21199091119863 is the angularcoordinate and119863 is the bearingrsquos diameter
The values of 119906119894 over the surface of the journal could bedetermined using the following kinematic relations
1199061 = 1205961198632 + 1198811 cos (120572) minus 1198812 sin (120572) 1199062 = 1198811 sin (120572) + 1198812 cos (120572)
(3)
where 120596 is angular speed of the rotor and (1198811 1198812) areprojections of the velocity vector of the center of the rotor
Calculation of pressure distribution 119901(1199091 1199093) at somespecific point in time is a boundary problem of solutionof Reynolds equation (1) considering (2) and (3) with thefollowing boundary conditions the pressure on each side of
International Journal of Rotating Machinery 3
the bearing is known to be 119901(1199091 0) = 1199010 and 119901(1199091 1198713) =1199011 along the 1199091 direction the following condition has to bemet 119901(0 1199093) = 119901(120587119863 1199093) 1205971199011205971199091|1199091=0 = 1205971199011205971199091|1199091=120587119863Additionally Gumbelrsquos boundary condition for film ruptureis used [6 23]
Given the pressure distribution the components of theresulting oil film reaction force can be obtained as projectionson the119883119894 (see Figure 1)
1198771 = minusint11987130int1205871198630
119901 (1199091 1199093) cos (120572) 119889119909111988911990931198772 = minusint1198713
0int1205871198630
119901 (1199091 1199093) sin (120572) 11988911990911198891199093(4)
where 1198713 is the length of the bearingThe equation for lateral vibrations of the rotorrsquos center can
be presented in simple form [1ndash4 6]
119898119889119889119905 = + (5)
where 119898 is the mass of the rotor per one bearing 119905 is time = 119898Δ1205962 [ cos120596119905sin120596119905 ] + 119898 [ 0minus119892 ] is the bearing load (centrifugaland inertia forces) 119898Δ is the rotorrsquos imbalance and 119892 is freefall acceleration
Oscillationsrsquo velocity of the rotor is significantly lessthan tangential velocity of journalrsquos surface 1205961198632 so thesolution of (5) is linked to solution of the steady-statefluidrsquos flow problem solution So time as variable couldbe neglected during calculation of oil film force (4) Thissignificantly simplifies the procedure of numerical solution ofrotor dynamics problems [1 6] Three basic approaches havebeen considered and are characterized by different methodsof oil film forces determination
The first approach called trajectory method [1ndash4 6] isbased on solution of Reynolds equation (1) followed by inte-gration of pressure distribution and determination of 119877119894 (4)Such approach is considered referential due to high precisionand however has low performance in computational termssince the Reynolds equation has to be solved at each time step
The second approach called the method of linearizationof the oil film force determination [1ndash4 6] is based on thedecomposition of reaction force components 119877119894 into theTaylor series in the proximity of the equilibrium position119883119864119894 The matrices of stiffness 119870 and damping 119861 calculated in theequilibrium position shall be introduced as follows
119870119894119895 = minus 120597119877119894120597119883119895 119861119894119895 = minus120597119877119894120597119881119895
(6)
Then the motion equation of the rotor (5) with givenoperational conditions of the rotor system and given the
linearization of the filmrsquos reaction forces will be as follows [1ndash4 6 24]
119898[[[[
11988911988111198891199051198891198812119889119905]]]]= [11987711986411198771198642] minus [
11987011 1198701211987021 11987022] sdot [1198831 minus 11988311986411198832 minus 1198831198642]
minus [11986111 1198611211986121 11986122] sdot [11988111198812] + 119898Δ1205962 [
cos120596119905sin120596119905]
+ 119898[ 0minus119892]
(7)
The equilibrium point 119883119864119894 can be determined using thetrajectory approach In many practical applications the equi-librium locus curve is calculated to solve problems of rotordynamics [1ndash4 6]The points on this curve correspond to theequilibrium positions at various rotational speeds Necessityto determine the equilibrium position or the equilibriumlocus curve complicates the method of linearization
The third approach is based on a neural network programmodule to approximate the oil film forcersquos components119877119894 andto solve (5) A two-layer feed-forward neural network withinputs 119880119896 (119896 = 1 119873inp) and outputs 119884119894 (119894 = 1 119873out)is used (see Figure 2) The functionality of the network isdetermined by specifying the strengths of the connectionscalledweights119908 and the neuron transfer function119891 [25]Themathematical model of the used neural network is
119884119894 = 119891out(119873hidsum119895=1
119908out119894119895 119911119895 + 119887out)
119911119895 = 119891hid(119873inpsum119896=1
119908hid119895119896119880119896 + 119887hid)
(8)
where 119891out(119909) = 119909 is a linear transfer function and 119891hid(119909) =minus1 + 2(1 + exp(minus2119909)) is a sigmoid symmetric transfer func-tion 119908out
119894119895 and 119908hid119895119896 are weights 119887out and 119887hid are thresholds
of output and hidden layers respectively and 119911119895 are theintermediate outputs of hidden neurons (119895 = 1 119873hid)
In the present paper the components of the oil film force119884119894 = 119877119894 are considered as outputs and four or five kinematicvalues depending on the problem are considered inputs = [1198831 1198832 1198811 1198812] or = [119899 1198831 1198832 1198811 1198812] where 119899 isthe rotorrsquos speed
Neural network learning is essentially the solution ofoptimization problem of a minimum of the mean squarederror function search
MSE = 1119876119873outsum119894=1
( 119876sum119902=1
(119884119902119894 minus 119902119894 )2) 997904rArr min (9)
where119876 is a number of samples of inputs and outputs and 119902119894is the target value of an 119894th output in the 119902th sample
The mean squared error function (9) is the functionof a number of variables 119908out
119894119895 and 119908hid119895119896 The search for an
4 International Journal of Rotating Machinery
Input Hidden layer Output layer Output
w
b
+w
b
+U Y
Ninp Nhid Nout
Figure 2 Feed-forward neural network with119873inp number of inputs with119873hid neurons in hidden layer and with119873out outputs
extremum of such function is implemented numerically Oneof the criteria of neural networkrsquos quality is the correlationcoefficient between outputs and targets 119903119884 [26] Target data119894 in the present paper is based on the numerical resultsobtained using the trajectory approach
Stability analysis of the obtained results could be imple-mented based on the rotorrsquos locus analysis using Poincaremaps [10 27ndash29] Moreover the RouthndashHurwitz criterioncould be applied to the linearization approach [1 10]
3 Simulation Results
Three basic approaches have been considered and character-ized by differentmethods of oil film forces determination thetrajectory method the linearization method and the neuralnetwork method Numerical solution of Reynolds equation(1) was implemented using the finite difference method Theobtained set of linear equations was solved using the Gaussmethod [30] The Levenberg-Marquardt backpropagationalgorithm was used in training neural networks [25 3132] which in its turn was based on the numerical resultsobtained using the trajectory method The rotor dynamicscalculation program was based on the numerical solution of(5) or (7) using the explicit Runge-Kutta method of 4th and5th order [30] During the development of the programs theGNU-Octave software and Octaversquos Neural Network Package[31] have been used The GNU-Octave products are freesoftware and use the Matlab compatible language Duringsimulations a PC with following characteristics has beenused Intel Core i5-4690K CPU 35GHz RAM 12GB x64OS
The results presented below correspond to various typesof problems solved
31 Rotor Dynamics with Fixed Speed and Low VibrationsA rotor system with the following parameters has beensubjected to the study rotor with 821 kg mass rotates ata constant speed of 4000 rpm under the load 119898119892 andcentrifugal force 18119898119892 and is supported by two plain journalfluid-film bearings with 40mm diameter and 20mm lengthwith amean radial gap of 100120583m lubricant ismineral oil withdynamic viscosity of 13mPasdots the pressure on each side of thebearing is 01MPa
First trajectory approach has been applied A preliminarynumerical test neglecting the centrifugal force successfully
0 200 400 600 800 1000
Mea
n sq
uare
d er
ror (
N)
Epoch
TrainValidation
TestBest
100
10minus1
10minus2
10minus3
10minus4
Figure 3 Mean squared error
converged to the equilibrium point 119864 = [ minus694 318 ] 120583mNext linearization approach was used
Then a neural network has been developed for trainingwith a number of neurons in the hidden layer 119873hid = 15As the input data a matrix of 4 times 105 elements was usedwhich consisted of numerical values of the coordinates 119883119894and the velocities 119881119894 with 1199050 = 1 s calculated time ofrotorrsquos motion The target data matrix of 2 times 105 elementsconsisted of the numerical values of oil film forces 119877119894 Thematrices of input and output data were divided into threegroups for training validation and testing in fractions 06 03and 01 respectively The procedure of adjustment has beenimplemented using application software [31] Training wasdone in 100 iterations so-called epochs [25] in approximately10minutesThe convergence graph of amean squared error ofthe network during training is presented in Figure 3 Trainingquality of a neural network is characterized by the followingvalues of the mean squared errorrsquos value and correlationcoefficients MSE = 75 sdot 10minus4N 119903119884 = 99999 sdot 10minus1
The numerical tests for comparative calculation of therotorrsquos trajectories have been carried out for various values of
International Journal of Rotating Machinery 5
Time t (s)
Calc
ulat
ion
time
T (s
)
Real timeTrajectory approach
Linearization approachNeural network approach
100
100
101
102
10minus1
Figure 4 Calculation time
the relative centrifugal force 119865119888 = 119898Δ1205962119898119892 = Δ1205962119892 Otherinput parameters remained as during the training procedure
As a result of numerical tests a calculation time of1 sec of rotor motion was determined given the action ofdimensionless centrifugal force Δ1205962119892 = 16 (see Figure 4)It could be seen that the calculation time of rotor dynamicscalculation using the linearization approach is the least inthe whole range Application of the neural network moduleincreased the machine time up to 15ndash2 times under givenconditions Application of trajectory approach increased thecalculation time up to 60ndash90 times compared to the lineariza-tion approach It is indicative that calculation time of rotordynamics using linearization approach and neural networkapproach is faster than the flow of real time in the wholerange This fact means that the application of linearizationor neural network approaches in a real rotational machinecontrol system would make it possible to obtain results ofprognostic modeling [20 33 34]
As a result of another series of numerical tests the tra-jectories have been calculated for a dimensionless centrifugalforce Δ1205962119892 = 08 25 (see Figure 5) Calculated rotormotionrsquos time was set to 1 sec The simulation started atthe equilibrium point 119883119864119894 the trajectory approach taken asreferential The relative error of calculation has been chosenas quantitative criteria of accuracy evaluation
120575119883119894 = 119883Traj119894 minus 119883Lin(NN)
119894ℎ0 sdot 100 (10)
where 119883Traj119894 are coordinates obtained using the trajectory
approach and 119883Lin(NN)119894 are coordinates obtained using the
linearization or neural network approach 119894 = 1 2
The quality analysis of stability of calculated trajectorieshas been implemented based on the Poincare maps [27ndash29] The point were displayed at moments of time that weremultiples of the period of rotation of the rotor 119879 = 1119899It could be seen from the Poincare maps (see Figure 5)that in the given range of loads the rotorrsquos trajectoriesare quasiperiodic This results from the fact that after ashort transient process the trajectoryrsquos mapping becomesa dense pointed line which closes if the calculation timeincreases by 100 times or more This shows the presence ofincommensurable frequencies in the oscillations while themotion is not chaotic [27] It could also be seen from theFigure 5 that all three approaches to calculation of reactionforces gave the same result The relative error of the centerof mass location calculation with Δ1205962119892 = 08 during steady-state regimewas 04 and 03 for the linearization approachand the neural network approach respectivelyWithΔ1205962119892 =16 the relative error remains small but accuracy differs by10 times 03 and 3 for the linearization approach andthe neural network approach respectively Preservation ofaccuracy of the neural network approach could be explainedby the fact that the model of training was carried out withvalue of the dimensionless centrifugal force Δ1205962119892 = 18close to 16 Finally with Δ1205962119892 = 25 the error was no morethan 2 for the neural network approach and no more than6 for the linearization approach So the neural networkapproach compared to the linearization approach given thatthe amplitude of oscillations is more than 01ℎ0 has beenproven to be significantly more accurate
Further increase of the imbalance was not studied as itusually results in unstable trajectories Increase of imbalanceleads to increase of vibrationrsquos amplitude That is why thelinearization method could give inadequate results due toactual nonlinearity of the reaction forces at large eccentric-ities The neural network approach gives good interpolationresults that is within the learning sample During extrapo-lation deviation from the learning conditions could lead tounpredictable results and rapid increase of the error
32 Rotor Dynamics for Various Speed Regimes and Transitionfrom Low to High Vibrations The same rotor system as inSection 31 of the present paper has been studied Imbalancewas constant 119898Δ = 10minus4 kgsdotm and tests were run forvarious rotation speeds 1000 rpm 3000 rpm 5000 rpm and7000 rpm
The first series of simulations of rotorrsquos behavior atvarious rotation speeds was implemented using the trajectoryapproach Calculated motion time was set to 1 sec Apartfrom trajectories the location of equilibrium points has beendetermined marked ldquo+rdquo in Figure 6(a) The second seriesof simulations has been implemented using the linearizationapproach For that matrices of stiffness and damping havebeen determined at four points on the equilibrium locuscurve
Then four neural networks have been developed fortrainingwith119873hid = 15neurons in the hidden layer For everynetwork matrices = [1198831 1198832 1198811 1198812] and = [1198771 1198772] of4 times 104 and 2 times 104 elements were used as input and output
6 International Journal of Rotating Machinery
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 08
Relative load Δ middot 휔2g = 16
훿X
1(
)훿X
1(
)
훿X
2(
)훿X
2(
)X
2(휇
m)
X2
(휇m
)
X1 (휇m)
X1 (휇m)
210
240
270
180
minus74 minus73 minus72 minus71 minus7020
22
24
26
28
0 005 01 015 02minus1
0
1
t (s) t (s)
t (s) t (s)
0 005 01 015 02minus1
0
1
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
10
20
30
0 005 01 015 02minus5
0
5
0 005 01 015 02minus10
0
10
Figure 5 Continued
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Rotating Machinery 3
the bearing is known to be 119901(1199091 0) = 1199010 and 119901(1199091 1198713) =1199011 along the 1199091 direction the following condition has to bemet 119901(0 1199093) = 119901(120587119863 1199093) 1205971199011205971199091|1199091=0 = 1205971199011205971199091|1199091=120587119863Additionally Gumbelrsquos boundary condition for film ruptureis used [6 23]
Given the pressure distribution the components of theresulting oil film reaction force can be obtained as projectionson the119883119894 (see Figure 1)
1198771 = minusint11987130int1205871198630
119901 (1199091 1199093) cos (120572) 119889119909111988911990931198772 = minusint1198713
0int1205871198630
119901 (1199091 1199093) sin (120572) 11988911990911198891199093(4)
where 1198713 is the length of the bearingThe equation for lateral vibrations of the rotorrsquos center can
be presented in simple form [1ndash4 6]
119898119889119889119905 = + (5)
where 119898 is the mass of the rotor per one bearing 119905 is time = 119898Δ1205962 [ cos120596119905sin120596119905 ] + 119898 [ 0minus119892 ] is the bearing load (centrifugaland inertia forces) 119898Δ is the rotorrsquos imbalance and 119892 is freefall acceleration
Oscillationsrsquo velocity of the rotor is significantly lessthan tangential velocity of journalrsquos surface 1205961198632 so thesolution of (5) is linked to solution of the steady-statefluidrsquos flow problem solution So time as variable couldbe neglected during calculation of oil film force (4) Thissignificantly simplifies the procedure of numerical solution ofrotor dynamics problems [1 6] Three basic approaches havebeen considered and are characterized by different methodsof oil film forces determination
The first approach called trajectory method [1ndash4 6] isbased on solution of Reynolds equation (1) followed by inte-gration of pressure distribution and determination of 119877119894 (4)Such approach is considered referential due to high precisionand however has low performance in computational termssince the Reynolds equation has to be solved at each time step
The second approach called the method of linearizationof the oil film force determination [1ndash4 6] is based on thedecomposition of reaction force components 119877119894 into theTaylor series in the proximity of the equilibrium position119883119864119894 The matrices of stiffness 119870 and damping 119861 calculated in theequilibrium position shall be introduced as follows
119870119894119895 = minus 120597119877119894120597119883119895 119861119894119895 = minus120597119877119894120597119881119895
(6)
Then the motion equation of the rotor (5) with givenoperational conditions of the rotor system and given the
linearization of the filmrsquos reaction forces will be as follows [1ndash4 6 24]
119898[[[[
11988911988111198891199051198891198812119889119905]]]]= [11987711986411198771198642] minus [
11987011 1198701211987021 11987022] sdot [1198831 minus 11988311986411198832 minus 1198831198642]
minus [11986111 1198611211986121 11986122] sdot [11988111198812] + 119898Δ1205962 [
cos120596119905sin120596119905]
+ 119898[ 0minus119892]
(7)
The equilibrium point 119883119864119894 can be determined using thetrajectory approach In many practical applications the equi-librium locus curve is calculated to solve problems of rotordynamics [1ndash4 6]The points on this curve correspond to theequilibrium positions at various rotational speeds Necessityto determine the equilibrium position or the equilibriumlocus curve complicates the method of linearization
The third approach is based on a neural network programmodule to approximate the oil film forcersquos components119877119894 andto solve (5) A two-layer feed-forward neural network withinputs 119880119896 (119896 = 1 119873inp) and outputs 119884119894 (119894 = 1 119873out)is used (see Figure 2) The functionality of the network isdetermined by specifying the strengths of the connectionscalledweights119908 and the neuron transfer function119891 [25]Themathematical model of the used neural network is
119884119894 = 119891out(119873hidsum119895=1
119908out119894119895 119911119895 + 119887out)
119911119895 = 119891hid(119873inpsum119896=1
119908hid119895119896119880119896 + 119887hid)
(8)
where 119891out(119909) = 119909 is a linear transfer function and 119891hid(119909) =minus1 + 2(1 + exp(minus2119909)) is a sigmoid symmetric transfer func-tion 119908out
119894119895 and 119908hid119895119896 are weights 119887out and 119887hid are thresholds
of output and hidden layers respectively and 119911119895 are theintermediate outputs of hidden neurons (119895 = 1 119873hid)
In the present paper the components of the oil film force119884119894 = 119877119894 are considered as outputs and four or five kinematicvalues depending on the problem are considered inputs = [1198831 1198832 1198811 1198812] or = [119899 1198831 1198832 1198811 1198812] where 119899 isthe rotorrsquos speed
Neural network learning is essentially the solution ofoptimization problem of a minimum of the mean squarederror function search
MSE = 1119876119873outsum119894=1
( 119876sum119902=1
(119884119902119894 minus 119902119894 )2) 997904rArr min (9)
where119876 is a number of samples of inputs and outputs and 119902119894is the target value of an 119894th output in the 119902th sample
The mean squared error function (9) is the functionof a number of variables 119908out
119894119895 and 119908hid119895119896 The search for an
4 International Journal of Rotating Machinery
Input Hidden layer Output layer Output
w
b
+w
b
+U Y
Ninp Nhid Nout
Figure 2 Feed-forward neural network with119873inp number of inputs with119873hid neurons in hidden layer and with119873out outputs
extremum of such function is implemented numerically Oneof the criteria of neural networkrsquos quality is the correlationcoefficient between outputs and targets 119903119884 [26] Target data119894 in the present paper is based on the numerical resultsobtained using the trajectory approach
Stability analysis of the obtained results could be imple-mented based on the rotorrsquos locus analysis using Poincaremaps [10 27ndash29] Moreover the RouthndashHurwitz criterioncould be applied to the linearization approach [1 10]
3 Simulation Results
Three basic approaches have been considered and character-ized by differentmethods of oil film forces determination thetrajectory method the linearization method and the neuralnetwork method Numerical solution of Reynolds equation(1) was implemented using the finite difference method Theobtained set of linear equations was solved using the Gaussmethod [30] The Levenberg-Marquardt backpropagationalgorithm was used in training neural networks [25 3132] which in its turn was based on the numerical resultsobtained using the trajectory method The rotor dynamicscalculation program was based on the numerical solution of(5) or (7) using the explicit Runge-Kutta method of 4th and5th order [30] During the development of the programs theGNU-Octave software and Octaversquos Neural Network Package[31] have been used The GNU-Octave products are freesoftware and use the Matlab compatible language Duringsimulations a PC with following characteristics has beenused Intel Core i5-4690K CPU 35GHz RAM 12GB x64OS
The results presented below correspond to various typesof problems solved
31 Rotor Dynamics with Fixed Speed and Low VibrationsA rotor system with the following parameters has beensubjected to the study rotor with 821 kg mass rotates ata constant speed of 4000 rpm under the load 119898119892 andcentrifugal force 18119898119892 and is supported by two plain journalfluid-film bearings with 40mm diameter and 20mm lengthwith amean radial gap of 100120583m lubricant ismineral oil withdynamic viscosity of 13mPasdots the pressure on each side of thebearing is 01MPa
First trajectory approach has been applied A preliminarynumerical test neglecting the centrifugal force successfully
0 200 400 600 800 1000
Mea
n sq
uare
d er
ror (
N)
Epoch
TrainValidation
TestBest
100
10minus1
10minus2
10minus3
10minus4
Figure 3 Mean squared error
converged to the equilibrium point 119864 = [ minus694 318 ] 120583mNext linearization approach was used
Then a neural network has been developed for trainingwith a number of neurons in the hidden layer 119873hid = 15As the input data a matrix of 4 times 105 elements was usedwhich consisted of numerical values of the coordinates 119883119894and the velocities 119881119894 with 1199050 = 1 s calculated time ofrotorrsquos motion The target data matrix of 2 times 105 elementsconsisted of the numerical values of oil film forces 119877119894 Thematrices of input and output data were divided into threegroups for training validation and testing in fractions 06 03and 01 respectively The procedure of adjustment has beenimplemented using application software [31] Training wasdone in 100 iterations so-called epochs [25] in approximately10minutesThe convergence graph of amean squared error ofthe network during training is presented in Figure 3 Trainingquality of a neural network is characterized by the followingvalues of the mean squared errorrsquos value and correlationcoefficients MSE = 75 sdot 10minus4N 119903119884 = 99999 sdot 10minus1
The numerical tests for comparative calculation of therotorrsquos trajectories have been carried out for various values of
International Journal of Rotating Machinery 5
Time t (s)
Calc
ulat
ion
time
T (s
)
Real timeTrajectory approach
Linearization approachNeural network approach
100
100
101
102
10minus1
Figure 4 Calculation time
the relative centrifugal force 119865119888 = 119898Δ1205962119898119892 = Δ1205962119892 Otherinput parameters remained as during the training procedure
As a result of numerical tests a calculation time of1 sec of rotor motion was determined given the action ofdimensionless centrifugal force Δ1205962119892 = 16 (see Figure 4)It could be seen that the calculation time of rotor dynamicscalculation using the linearization approach is the least inthe whole range Application of the neural network moduleincreased the machine time up to 15ndash2 times under givenconditions Application of trajectory approach increased thecalculation time up to 60ndash90 times compared to the lineariza-tion approach It is indicative that calculation time of rotordynamics using linearization approach and neural networkapproach is faster than the flow of real time in the wholerange This fact means that the application of linearizationor neural network approaches in a real rotational machinecontrol system would make it possible to obtain results ofprognostic modeling [20 33 34]
As a result of another series of numerical tests the tra-jectories have been calculated for a dimensionless centrifugalforce Δ1205962119892 = 08 25 (see Figure 5) Calculated rotormotionrsquos time was set to 1 sec The simulation started atthe equilibrium point 119883119864119894 the trajectory approach taken asreferential The relative error of calculation has been chosenas quantitative criteria of accuracy evaluation
120575119883119894 = 119883Traj119894 minus 119883Lin(NN)
119894ℎ0 sdot 100 (10)
where 119883Traj119894 are coordinates obtained using the trajectory
approach and 119883Lin(NN)119894 are coordinates obtained using the
linearization or neural network approach 119894 = 1 2
The quality analysis of stability of calculated trajectorieshas been implemented based on the Poincare maps [27ndash29] The point were displayed at moments of time that weremultiples of the period of rotation of the rotor 119879 = 1119899It could be seen from the Poincare maps (see Figure 5)that in the given range of loads the rotorrsquos trajectoriesare quasiperiodic This results from the fact that after ashort transient process the trajectoryrsquos mapping becomesa dense pointed line which closes if the calculation timeincreases by 100 times or more This shows the presence ofincommensurable frequencies in the oscillations while themotion is not chaotic [27] It could also be seen from theFigure 5 that all three approaches to calculation of reactionforces gave the same result The relative error of the centerof mass location calculation with Δ1205962119892 = 08 during steady-state regimewas 04 and 03 for the linearization approachand the neural network approach respectivelyWithΔ1205962119892 =16 the relative error remains small but accuracy differs by10 times 03 and 3 for the linearization approach andthe neural network approach respectively Preservation ofaccuracy of the neural network approach could be explainedby the fact that the model of training was carried out withvalue of the dimensionless centrifugal force Δ1205962119892 = 18close to 16 Finally with Δ1205962119892 = 25 the error was no morethan 2 for the neural network approach and no more than6 for the linearization approach So the neural networkapproach compared to the linearization approach given thatthe amplitude of oscillations is more than 01ℎ0 has beenproven to be significantly more accurate
Further increase of the imbalance was not studied as itusually results in unstable trajectories Increase of imbalanceleads to increase of vibrationrsquos amplitude That is why thelinearization method could give inadequate results due toactual nonlinearity of the reaction forces at large eccentric-ities The neural network approach gives good interpolationresults that is within the learning sample During extrapo-lation deviation from the learning conditions could lead tounpredictable results and rapid increase of the error
32 Rotor Dynamics for Various Speed Regimes and Transitionfrom Low to High Vibrations The same rotor system as inSection 31 of the present paper has been studied Imbalancewas constant 119898Δ = 10minus4 kgsdotm and tests were run forvarious rotation speeds 1000 rpm 3000 rpm 5000 rpm and7000 rpm
The first series of simulations of rotorrsquos behavior atvarious rotation speeds was implemented using the trajectoryapproach Calculated motion time was set to 1 sec Apartfrom trajectories the location of equilibrium points has beendetermined marked ldquo+rdquo in Figure 6(a) The second seriesof simulations has been implemented using the linearizationapproach For that matrices of stiffness and damping havebeen determined at four points on the equilibrium locuscurve
Then four neural networks have been developed fortrainingwith119873hid = 15neurons in the hidden layer For everynetwork matrices = [1198831 1198832 1198811 1198812] and = [1198771 1198772] of4 times 104 and 2 times 104 elements were used as input and output
6 International Journal of Rotating Machinery
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 08
Relative load Δ middot 휔2g = 16
훿X
1(
)훿X
1(
)
훿X
2(
)훿X
2(
)X
2(휇
m)
X2
(휇m
)
X1 (휇m)
X1 (휇m)
210
240
270
180
minus74 minus73 minus72 minus71 minus7020
22
24
26
28
0 005 01 015 02minus1
0
1
t (s) t (s)
t (s) t (s)
0 005 01 015 02minus1
0
1
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
10
20
30
0 005 01 015 02minus5
0
5
0 005 01 015 02minus10
0
10
Figure 5 Continued
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
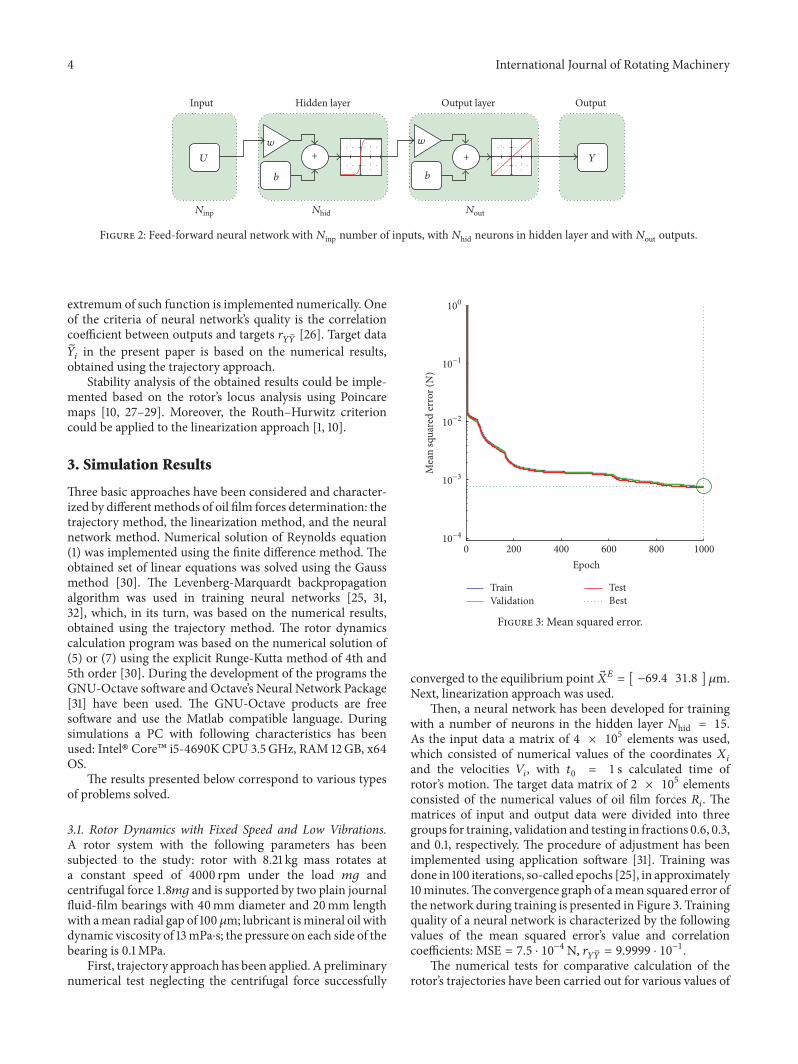
4 International Journal of Rotating Machinery
Input Hidden layer Output layer Output
w
b
+w
b
+U Y
Ninp Nhid Nout
Figure 2 Feed-forward neural network with119873inp number of inputs with119873hid neurons in hidden layer and with119873out outputs
extremum of such function is implemented numerically Oneof the criteria of neural networkrsquos quality is the correlationcoefficient between outputs and targets 119903119884 [26] Target data119894 in the present paper is based on the numerical resultsobtained using the trajectory approach
Stability analysis of the obtained results could be imple-mented based on the rotorrsquos locus analysis using Poincaremaps [10 27ndash29] Moreover the RouthndashHurwitz criterioncould be applied to the linearization approach [1 10]
3 Simulation Results
Three basic approaches have been considered and character-ized by differentmethods of oil film forces determination thetrajectory method the linearization method and the neuralnetwork method Numerical solution of Reynolds equation(1) was implemented using the finite difference method Theobtained set of linear equations was solved using the Gaussmethod [30] The Levenberg-Marquardt backpropagationalgorithm was used in training neural networks [25 3132] which in its turn was based on the numerical resultsobtained using the trajectory method The rotor dynamicscalculation program was based on the numerical solution of(5) or (7) using the explicit Runge-Kutta method of 4th and5th order [30] During the development of the programs theGNU-Octave software and Octaversquos Neural Network Package[31] have been used The GNU-Octave products are freesoftware and use the Matlab compatible language Duringsimulations a PC with following characteristics has beenused Intel Core i5-4690K CPU 35GHz RAM 12GB x64OS
The results presented below correspond to various typesof problems solved
31 Rotor Dynamics with Fixed Speed and Low VibrationsA rotor system with the following parameters has beensubjected to the study rotor with 821 kg mass rotates ata constant speed of 4000 rpm under the load 119898119892 andcentrifugal force 18119898119892 and is supported by two plain journalfluid-film bearings with 40mm diameter and 20mm lengthwith amean radial gap of 100120583m lubricant ismineral oil withdynamic viscosity of 13mPasdots the pressure on each side of thebearing is 01MPa
First trajectory approach has been applied A preliminarynumerical test neglecting the centrifugal force successfully
0 200 400 600 800 1000
Mea
n sq
uare
d er
ror (
N)
Epoch
TrainValidation
TestBest
100
10minus1
10minus2
10minus3
10minus4
Figure 3 Mean squared error
converged to the equilibrium point 119864 = [ minus694 318 ] 120583mNext linearization approach was used
Then a neural network has been developed for trainingwith a number of neurons in the hidden layer 119873hid = 15As the input data a matrix of 4 times 105 elements was usedwhich consisted of numerical values of the coordinates 119883119894and the velocities 119881119894 with 1199050 = 1 s calculated time ofrotorrsquos motion The target data matrix of 2 times 105 elementsconsisted of the numerical values of oil film forces 119877119894 Thematrices of input and output data were divided into threegroups for training validation and testing in fractions 06 03and 01 respectively The procedure of adjustment has beenimplemented using application software [31] Training wasdone in 100 iterations so-called epochs [25] in approximately10minutesThe convergence graph of amean squared error ofthe network during training is presented in Figure 3 Trainingquality of a neural network is characterized by the followingvalues of the mean squared errorrsquos value and correlationcoefficients MSE = 75 sdot 10minus4N 119903119884 = 99999 sdot 10minus1
The numerical tests for comparative calculation of therotorrsquos trajectories have been carried out for various values of
International Journal of Rotating Machinery 5
Time t (s)
Calc
ulat
ion
time
T (s
)
Real timeTrajectory approach
Linearization approachNeural network approach
100
100
101
102
10minus1
Figure 4 Calculation time
the relative centrifugal force 119865119888 = 119898Δ1205962119898119892 = Δ1205962119892 Otherinput parameters remained as during the training procedure
As a result of numerical tests a calculation time of1 sec of rotor motion was determined given the action ofdimensionless centrifugal force Δ1205962119892 = 16 (see Figure 4)It could be seen that the calculation time of rotor dynamicscalculation using the linearization approach is the least inthe whole range Application of the neural network moduleincreased the machine time up to 15ndash2 times under givenconditions Application of trajectory approach increased thecalculation time up to 60ndash90 times compared to the lineariza-tion approach It is indicative that calculation time of rotordynamics using linearization approach and neural networkapproach is faster than the flow of real time in the wholerange This fact means that the application of linearizationor neural network approaches in a real rotational machinecontrol system would make it possible to obtain results ofprognostic modeling [20 33 34]
As a result of another series of numerical tests the tra-jectories have been calculated for a dimensionless centrifugalforce Δ1205962119892 = 08 25 (see Figure 5) Calculated rotormotionrsquos time was set to 1 sec The simulation started atthe equilibrium point 119883119864119894 the trajectory approach taken asreferential The relative error of calculation has been chosenas quantitative criteria of accuracy evaluation
120575119883119894 = 119883Traj119894 minus 119883Lin(NN)
119894ℎ0 sdot 100 (10)
where 119883Traj119894 are coordinates obtained using the trajectory
approach and 119883Lin(NN)119894 are coordinates obtained using the
linearization or neural network approach 119894 = 1 2
The quality analysis of stability of calculated trajectorieshas been implemented based on the Poincare maps [27ndash29] The point were displayed at moments of time that weremultiples of the period of rotation of the rotor 119879 = 1119899It could be seen from the Poincare maps (see Figure 5)that in the given range of loads the rotorrsquos trajectoriesare quasiperiodic This results from the fact that after ashort transient process the trajectoryrsquos mapping becomesa dense pointed line which closes if the calculation timeincreases by 100 times or more This shows the presence ofincommensurable frequencies in the oscillations while themotion is not chaotic [27] It could also be seen from theFigure 5 that all three approaches to calculation of reactionforces gave the same result The relative error of the centerof mass location calculation with Δ1205962119892 = 08 during steady-state regimewas 04 and 03 for the linearization approachand the neural network approach respectivelyWithΔ1205962119892 =16 the relative error remains small but accuracy differs by10 times 03 and 3 for the linearization approach andthe neural network approach respectively Preservation ofaccuracy of the neural network approach could be explainedby the fact that the model of training was carried out withvalue of the dimensionless centrifugal force Δ1205962119892 = 18close to 16 Finally with Δ1205962119892 = 25 the error was no morethan 2 for the neural network approach and no more than6 for the linearization approach So the neural networkapproach compared to the linearization approach given thatthe amplitude of oscillations is more than 01ℎ0 has beenproven to be significantly more accurate
Further increase of the imbalance was not studied as itusually results in unstable trajectories Increase of imbalanceleads to increase of vibrationrsquos amplitude That is why thelinearization method could give inadequate results due toactual nonlinearity of the reaction forces at large eccentric-ities The neural network approach gives good interpolationresults that is within the learning sample During extrapo-lation deviation from the learning conditions could lead tounpredictable results and rapid increase of the error
32 Rotor Dynamics for Various Speed Regimes and Transitionfrom Low to High Vibrations The same rotor system as inSection 31 of the present paper has been studied Imbalancewas constant 119898Δ = 10minus4 kgsdotm and tests were run forvarious rotation speeds 1000 rpm 3000 rpm 5000 rpm and7000 rpm
The first series of simulations of rotorrsquos behavior atvarious rotation speeds was implemented using the trajectoryapproach Calculated motion time was set to 1 sec Apartfrom trajectories the location of equilibrium points has beendetermined marked ldquo+rdquo in Figure 6(a) The second seriesof simulations has been implemented using the linearizationapproach For that matrices of stiffness and damping havebeen determined at four points on the equilibrium locuscurve
Then four neural networks have been developed fortrainingwith119873hid = 15neurons in the hidden layer For everynetwork matrices = [1198831 1198832 1198811 1198812] and = [1198771 1198772] of4 times 104 and 2 times 104 elements were used as input and output
6 International Journal of Rotating Machinery
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 08
Relative load Δ middot 휔2g = 16
훿X
1(
)훿X
1(
)
훿X
2(
)훿X
2(
)X
2(휇
m)
X2
(휇m
)
X1 (휇m)
X1 (휇m)
210
240
270
180
minus74 minus73 minus72 minus71 minus7020
22
24
26
28
0 005 01 015 02minus1
0
1
t (s) t (s)
t (s) t (s)
0 005 01 015 02minus1
0
1
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
10
20
30
0 005 01 015 02minus5
0
5
0 005 01 015 02minus10
0
10
Figure 5 Continued
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
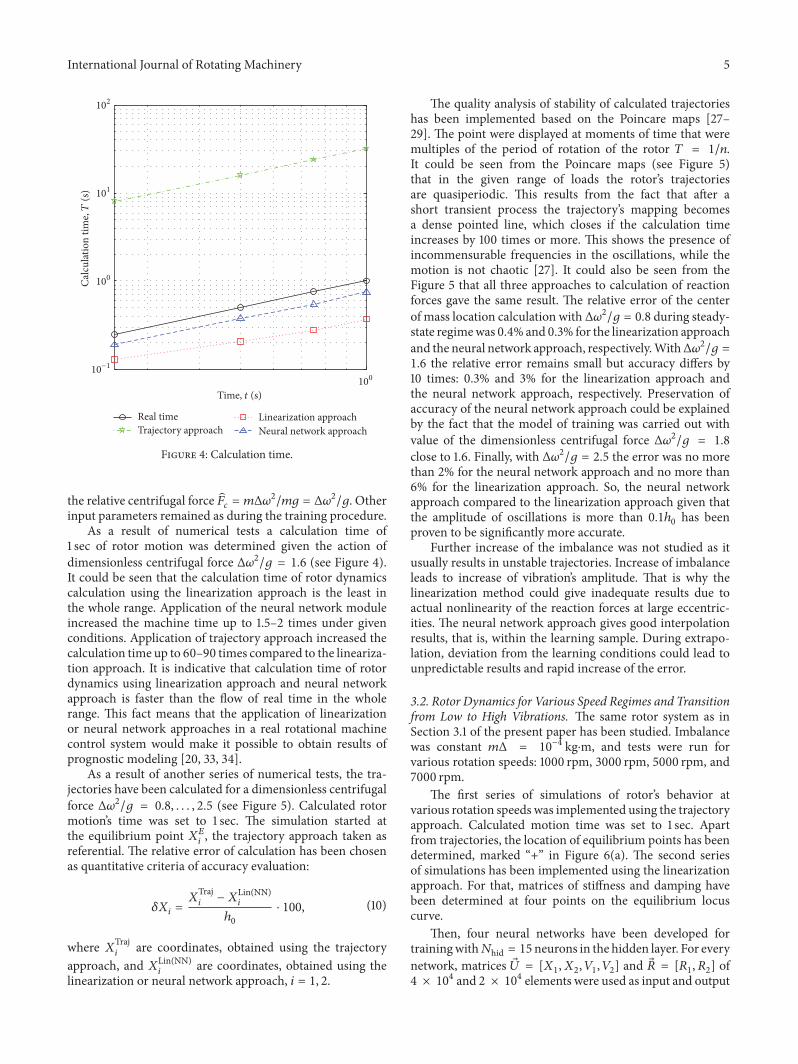
International Journal of Rotating Machinery 5
Time t (s)
Calc
ulat
ion
time
T (s
)
Real timeTrajectory approach
Linearization approachNeural network approach
100
100
101
102
10minus1
Figure 4 Calculation time
the relative centrifugal force 119865119888 = 119898Δ1205962119898119892 = Δ1205962119892 Otherinput parameters remained as during the training procedure
As a result of numerical tests a calculation time of1 sec of rotor motion was determined given the action ofdimensionless centrifugal force Δ1205962119892 = 16 (see Figure 4)It could be seen that the calculation time of rotor dynamicscalculation using the linearization approach is the least inthe whole range Application of the neural network moduleincreased the machine time up to 15ndash2 times under givenconditions Application of trajectory approach increased thecalculation time up to 60ndash90 times compared to the lineariza-tion approach It is indicative that calculation time of rotordynamics using linearization approach and neural networkapproach is faster than the flow of real time in the wholerange This fact means that the application of linearizationor neural network approaches in a real rotational machinecontrol system would make it possible to obtain results ofprognostic modeling [20 33 34]
As a result of another series of numerical tests the tra-jectories have been calculated for a dimensionless centrifugalforce Δ1205962119892 = 08 25 (see Figure 5) Calculated rotormotionrsquos time was set to 1 sec The simulation started atthe equilibrium point 119883119864119894 the trajectory approach taken asreferential The relative error of calculation has been chosenas quantitative criteria of accuracy evaluation
120575119883119894 = 119883Traj119894 minus 119883Lin(NN)
119894ℎ0 sdot 100 (10)
where 119883Traj119894 are coordinates obtained using the trajectory
approach and 119883Lin(NN)119894 are coordinates obtained using the
linearization or neural network approach 119894 = 1 2
The quality analysis of stability of calculated trajectorieshas been implemented based on the Poincare maps [27ndash29] The point were displayed at moments of time that weremultiples of the period of rotation of the rotor 119879 = 1119899It could be seen from the Poincare maps (see Figure 5)that in the given range of loads the rotorrsquos trajectoriesare quasiperiodic This results from the fact that after ashort transient process the trajectoryrsquos mapping becomesa dense pointed line which closes if the calculation timeincreases by 100 times or more This shows the presence ofincommensurable frequencies in the oscillations while themotion is not chaotic [27] It could also be seen from theFigure 5 that all three approaches to calculation of reactionforces gave the same result The relative error of the centerof mass location calculation with Δ1205962119892 = 08 during steady-state regimewas 04 and 03 for the linearization approachand the neural network approach respectivelyWithΔ1205962119892 =16 the relative error remains small but accuracy differs by10 times 03 and 3 for the linearization approach andthe neural network approach respectively Preservation ofaccuracy of the neural network approach could be explainedby the fact that the model of training was carried out withvalue of the dimensionless centrifugal force Δ1205962119892 = 18close to 16 Finally with Δ1205962119892 = 25 the error was no morethan 2 for the neural network approach and no more than6 for the linearization approach So the neural networkapproach compared to the linearization approach given thatthe amplitude of oscillations is more than 01ℎ0 has beenproven to be significantly more accurate
Further increase of the imbalance was not studied as itusually results in unstable trajectories Increase of imbalanceleads to increase of vibrationrsquos amplitude That is why thelinearization method could give inadequate results due toactual nonlinearity of the reaction forces at large eccentric-ities The neural network approach gives good interpolationresults that is within the learning sample During extrapo-lation deviation from the learning conditions could lead tounpredictable results and rapid increase of the error
32 Rotor Dynamics for Various Speed Regimes and Transitionfrom Low to High Vibrations The same rotor system as inSection 31 of the present paper has been studied Imbalancewas constant 119898Δ = 10minus4 kgsdotm and tests were run forvarious rotation speeds 1000 rpm 3000 rpm 5000 rpm and7000 rpm
The first series of simulations of rotorrsquos behavior atvarious rotation speeds was implemented using the trajectoryapproach Calculated motion time was set to 1 sec Apartfrom trajectories the location of equilibrium points has beendetermined marked ldquo+rdquo in Figure 6(a) The second seriesof simulations has been implemented using the linearizationapproach For that matrices of stiffness and damping havebeen determined at four points on the equilibrium locuscurve
Then four neural networks have been developed fortrainingwith119873hid = 15neurons in the hidden layer For everynetwork matrices = [1198831 1198832 1198811 1198812] and = [1198771 1198772] of4 times 104 and 2 times 104 elements were used as input and output
6 International Journal of Rotating Machinery
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 08
Relative load Δ middot 휔2g = 16
훿X
1(
)훿X
1(
)
훿X
2(
)훿X
2(
)X
2(휇
m)
X2
(휇m
)
X1 (휇m)
X1 (휇m)
210
240
270
180
minus74 minus73 minus72 minus71 minus7020
22
24
26
28
0 005 01 015 02minus1
0
1
t (s) t (s)
t (s) t (s)
0 005 01 015 02minus1
0
1
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
10
20
30
0 005 01 015 02minus5
0
5
0 005 01 015 02minus10
0
10
Figure 5 Continued
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
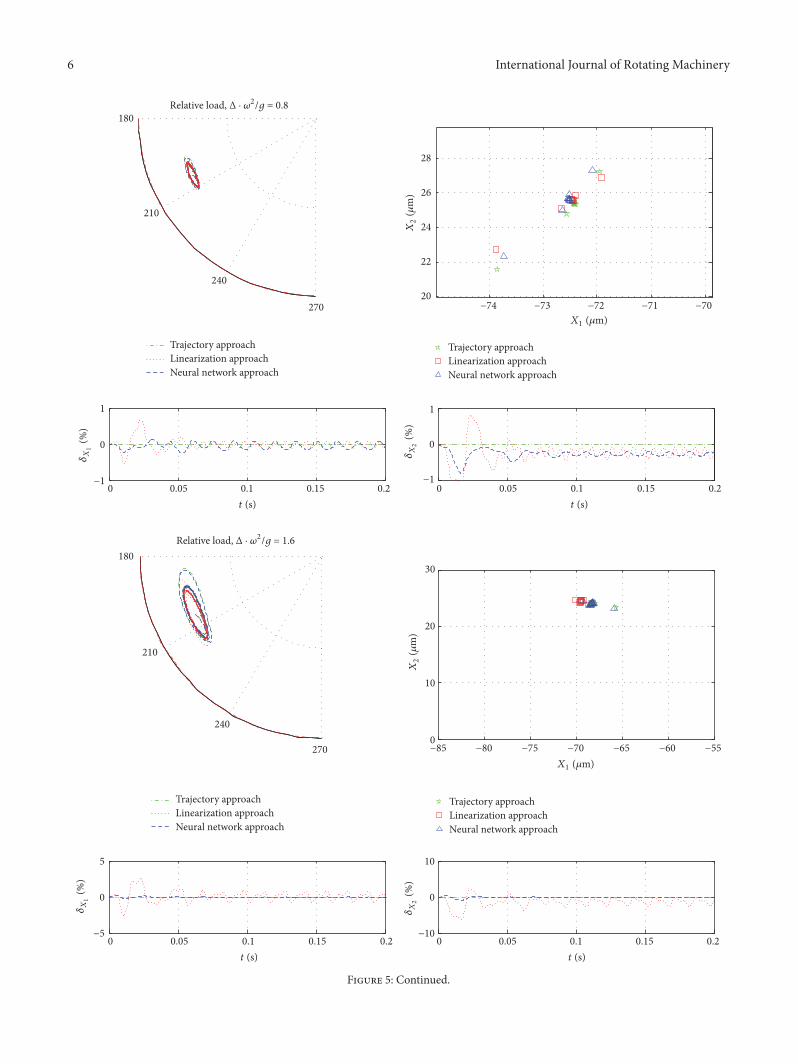
6 International Journal of Rotating Machinery
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 08
Relative load Δ middot 휔2g = 16
훿X
1(
)훿X
1(
)
훿X
2(
)훿X
2(
)X
2(휇
m)
X2
(휇m
)
X1 (휇m)
X1 (휇m)
210
240
270
180
minus74 minus73 minus72 minus71 minus7020
22
24
26
28
0 005 01 015 02minus1
0
1
t (s) t (s)
t (s) t (s)
0 005 01 015 02minus1
0
1
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
10
20
30
0 005 01 015 02minus5
0
5
0 005 01 015 02minus10
0
10
Figure 5 Continued
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
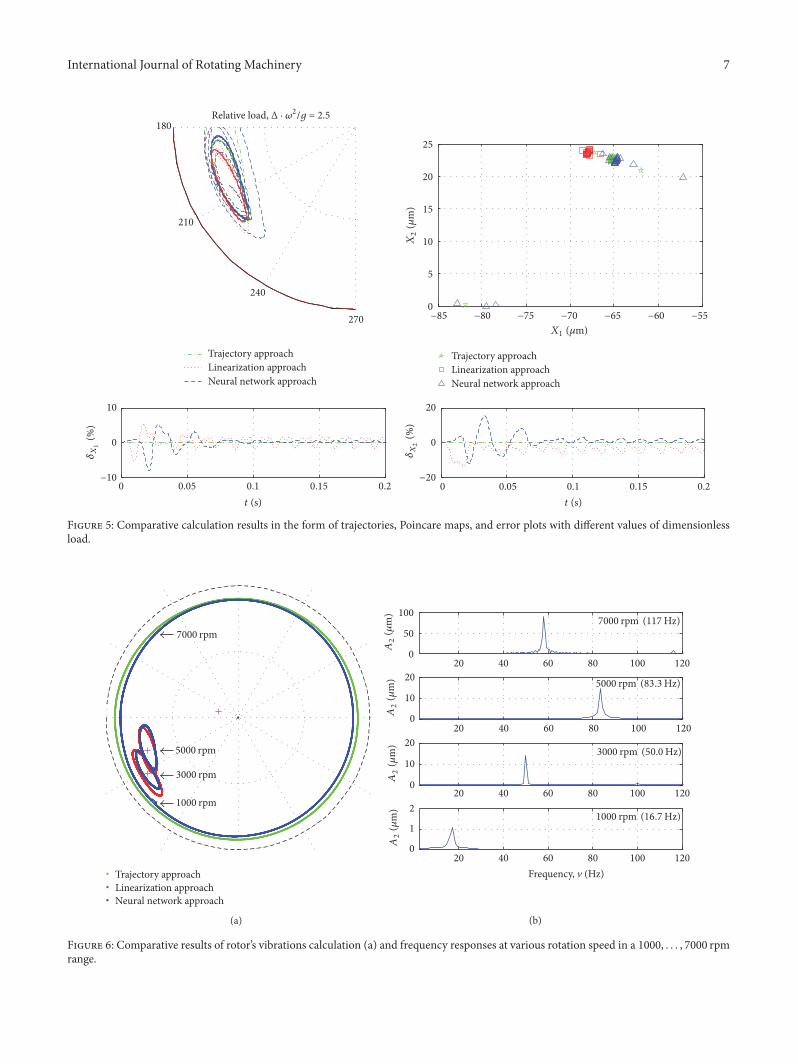
International Journal of Rotating Machinery 7
Trajectory approachLinearization approachNeural network approach
Trajectory approachLinearization approachNeural network approach
Relative load Δ middot 휔2g = 25
훿X
1(
)
훿X
2(
)X
2(휇
m)
X1 (휇m)
t (s) t (s)
210
240
270
180
minus85 minus80 minus75 minus70 minus65 minus60 minus550
5
10
15
20
25
0 005 01 015 02minus10
0
10
0 005 01 015 02minus20
0
20
Figure 5 Comparative calculation results in the form of trajectories Poincare maps and error plots with different values of dimensionlessload
Trajectory approachLinearization approachNeural network approach
7000 rpm
5000 rpm
3000 rpm
1000 rpm
(a)
20 40 60 80 100 1200
50
100
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
10
20
20 40 60 80 100 1200
1
2
A2
(휇m
)A
2(휇
m)
A2
(휇m
)A
2(휇
m)
Frequency v (Hz)
7000 rpm (117 Hz)
5000 rpm (833 Hz)
3000 rpm (500 Hz)
1000 rpm (167 Hz)
(b)
Figure 6 Comparative results of rotorrsquos vibrations calculation (a) and frequency responses at various rotation speed in a 1000 7000 rpmrange
8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Rotating Machinery
Table 1 Comparative results of rotorrsquos trajectory calculation atvarious rotation speed in 1000 7000 rpm range
119899 rpm max 120575119883119894 Linearization approach Neural network approach
1000 05 0043000 9 065000 6 017000 inf 4
data respectivelyThematrices of input and output data weredivided into three groups for training validation and testingin fractions 06 03 and 01 respectively Training of eachnetwork was done in 1000 epochs in approximately 1ndash3minTraining quality is characterized by the following values ofmean squared errors and correlation coefficients MSE =[24 31 27 14] sdot 10minus4 N 119903119884 = [999 999 999 999] sdot10minus1
The calculation results showed that in the range ofspeeds from 1000 to 5000 rpm the vibrations of the rotorhave the frequency equal to the rotation frequency (seeFigure 6(b)) In this range of speed the oil whirl does notappear under given conditions and the main reason ofthe occurrence of vibrations is the imbalance of the rotorAdditional calculations have shown that the critical speed ofthe rotor is 3300 rpm In the range of speed from 6000 to7000 rpm some increased vibrations occur that correspond toapproximately twice critical speed (see Figures 6(a) and 6(b))The vibrations of the rotor have the frequency close to thecritical frequency (see Figure 6(b)) This is typical of oil whip[6] Here linearization approach becomes unstable and theneural network approach on the other hand remains stablewith sufficient accuracy (see Table 1)
So the neural network approach allows modeling ofsignificantly nonlinear vibrations such as oil whip Thenecessity of development of a separate neural network forevery rotation speed however it is a drawback of the appliedapproach Consequently in the next paragraph a neuralnetwork is consideredwith an additional input value rotationspeed of the rotor
33 Rotor Dynamics during Transient Regimes Modeling ofrotor dynamics during transient startstop regime is morecomplex and costly in terms of calculation resources Themain advantages of the linearization approach that areessentially simple implementation and good computationalperformance manifest themselves weakly in this case Thisis due to necessity to implement a number of intermediatecalculations of equilibrium position of stiffness and dampingmatrices and due to interpolation procedures In case ofthe neural network approach such additional interpolationprocedures are not needed There is also a possibility oftraining a neural network based on one experiment and noton a series of themThis is why application of the linearizationapproach has not been considered in this section
The transient regime has been studied using the test rigshown in the Figure 7 The main parameters of the test rig
Tachometer
Accelerometers Bearing housing
Figure 7 Part of the test rig with accelerometers DeltaTron 4507and the contactless tachometer M0024 [24]
are the same as in the Section 32 During the experimentthe rotor was steadily accelerated up to 4000 rpm and thenthe electromotor was shut down and disconnected Duringthe deceleration the data from tachometer and accelerationsensors was acquired Deceleration of the rotor took about1min Based on the results of rotation speed measurementsrotorrsquos speed was approximated as a linear function of timewhich describes the deceleration of the rotor during hydro-dynamic lubrication regime (down to 500 rpm) accuratelyenough Additional experiments at constant rotation speed inthe 1000ndash4000 rpm range showed that in this range the rotorvibrates at frequencies equal to the rotation frequency Thisresult matches the results in the Section 32
In this case one neural network has been developed fortraining with 119873hid = 35 neurons in the hidden layer Addi-tionally the rotation speedwas taken as an input so the 5 times 4sdot104 matrix of inputs was taken as = [119899 1198831 1198832 1198811 1198812] Thecombined sample of trajectories of the rotor at eight differentrotation speeds 119899 = 1000 5000 rpmwas used for trainingIn other words the training function had a step-like formThematrices of input and output data were divided into threegroups for training validation and testing in fractions 07015 and 015 respectively Training took no more than 10minutes Training quality is characterized by the followingvalues of mean squared errors and correlation coefficientsMSE = 40 sdot 10minus4N 119903119884 = 9998 sdot 10minus1
It has to be noted that one of the alternative ways to train aneural network during monotonous smooth change of speedwas not successfulThe results obtained based on such neuralnetworks were unstable This could be explained by factthat every value of speed occurs in a monotonous functiononly once In a step-like function many intermediate valuesare absent but the neural network manages to successfullyinterpolate them
In Figures 8(a) and 8(b) the results of deceleration ofthe rotor simulation are shown for trajectory and neuralnetworks approaches In Figure 8(c) the comparison of
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
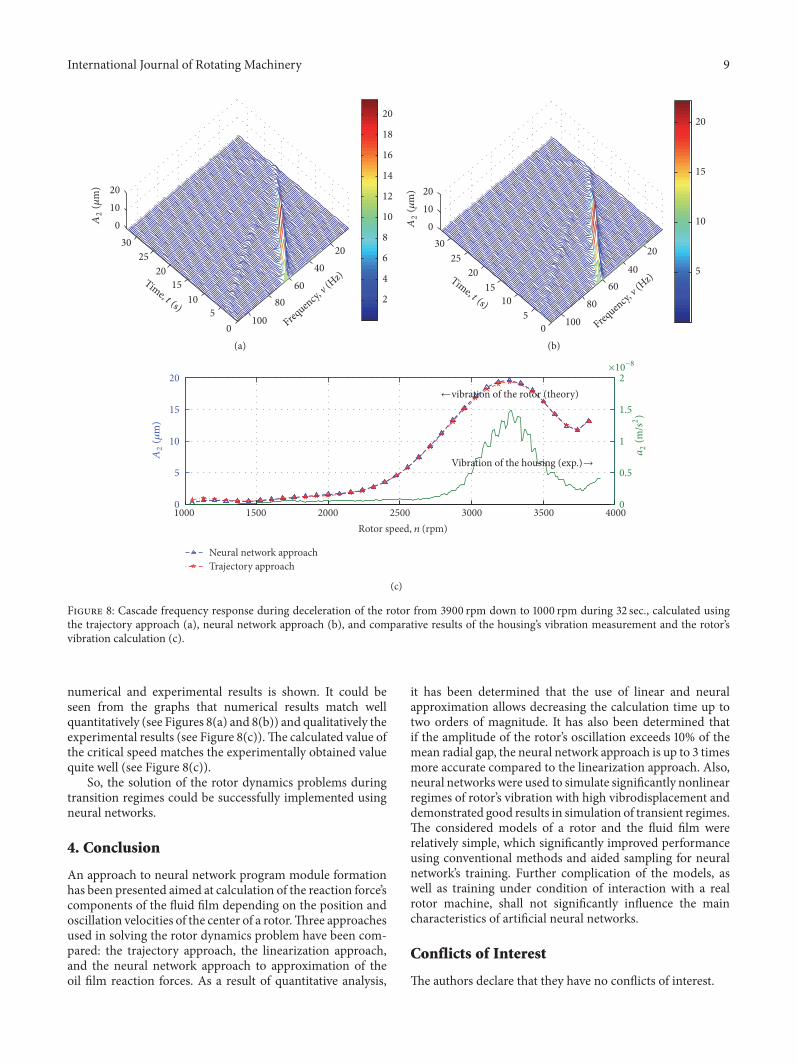
International Journal of Rotating Machinery 9
05
1015
2025
3020
4060
80
100
01020
Time t (s)2
4
6
8
10
12
14
16
18
20
A2
(휇m
)
Frequency
v (Hz)
(a)0
510
1520
2530
20
4060
80100
01020
5
10
15
20
Time t (s)
Frequency
v (Hz)
A2
(휇m
)
(b)
1500 2000 2500 3000 35000
5
10
15
20
1000 40000
05
1
15
2
Rotor speed n (rpm)
Neural network approachTrajectory approach
A2
(휇m
)
times10minus8
a2
(ms
2)
larrvibration of the rotor (theory)
Vibration of the housing (exp)rarr
(c)
Figure 8 Cascade frequency response during deceleration of the rotor from 3900 rpm down to 1000 rpm during 32 sec calculated usingthe trajectory approach (a) neural network approach (b) and comparative results of the housingrsquos vibration measurement and the rotorrsquosvibration calculation (c)
numerical and experimental results is shown It could beseen from the graphs that numerical results match wellquantitatively (see Figures 8(a) and 8(b)) and qualitatively theexperimental results (see Figure 8(c))The calculated value ofthe critical speed matches the experimentally obtained valuequite well (see Figure 8(c))
So the solution of the rotor dynamics problems duringtransition regimes could be successfully implemented usingneural networks
4 Conclusion
An approach to neural network program module formationhas been presented aimed at calculation of the reaction forcersquoscomponents of the fluid film depending on the position andoscillation velocities of the center of a rotorThree approachesused in solving the rotor dynamics problem have been com-pared the trajectory approach the linearization approachand the neural network approach to approximation of theoil film reaction forces As a result of quantitative analysis
it has been determined that the use of linear and neuralapproximation allows decreasing the calculation time up totwo orders of magnitude It has also been determined thatif the amplitude of the rotorrsquos oscillation exceeds 10 of themean radial gap the neural network approach is up to 3 timesmore accurate compared to the linearization approach Alsoneural networks were used to simulate significantly nonlinearregimes of rotorrsquos vibration with high vibrodisplacement anddemonstrated good results in simulation of transient regimesThe considered models of a rotor and the fluid film wererelatively simple which significantly improved performanceusing conventional methods and aided sampling for neuralnetworkrsquos training Further complication of the models aswell as training under condition of interaction with a realrotor machine shall not significantly influence the maincharacteristics of artificial neural networks
Conflicts of Interest
The authors declare that they have no conflicts of interest
10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Rotating Machinery
Authorsrsquo Contributions
Alexey Kornaev developed the fluid flow and rotorrsquos dynamicmathematical model scripted the simulation program andwrote the manuscript Nickolay Kornaev developed the arti-ficial neural network program module and performed thenumerical experiment Elena Kornaeva and Leonid Savinanalyzed the experimentrsquos results Leonid Savin was in chargeof supervising this work
Acknowledgments
This work was supported by the Russian Science Foundationunder Project no 16-19-00186 (formulation and solution ofthe problem in all sections of the present paper) and by theMinistry of Education and Science of the Russian Federationunder Project no 92952201746 (development andmodern-ization of the test rig in Section 33) The authors gratefullyacknowledge this support The authors also express gratitudeto Alexander Fetisov for carrying out the experiment and toAlexander Babin for translation
References
[1] D Childs Turbomachinery Rotordynamics Phenomena Model-ing and Analysis John Wiley and Sons New York NY USA1993
[2] MGVanceRotordynamics of Turbomachinery JohnWiley andSons New York NY USA 1988
[3] T Yamamoto Linear and Nonlinear Rotordynamics A ModernTreatment with Applications John Wiley and Sons New YorkNY USA 2001
[4] L Savin O Solomin and D Ustinov ldquoRotor dynamics onfriction bearings with cryogenic lubricationrdquo in Proceedings ofthe TenthWorld Congress on the Machines andMechanisms vol4 pp 1716ndash1721 June 1999
[5] S P Asok K Sankaranarayanasamy T Sundararajan K Rajeshand G Sankar Ganeshan ldquoNeural network and CFD-basedoptimisation of square cavity and curved cavity static labyrinthsealsrdquoTribology International vol 40 no 7 pp 1204ndash1216 2007
[6] Y Hori Hydrodynamic lubrication Yokendo Ltd Tokyo 2006[7] M Kalkat S Yildirim and I Uzmay ldquoRotor dynamics analysis
of rotating machine system using artificial neural networksrdquoInternational Journal of Rotating Machinery p 9 2003
[8] M Karkoub and A Elkamel ldquoModelling pressure distributionin a rectangular gas bearing using neural networksrdquo TribologyInternational vol 30 no 2 pp 139ndash150 1997
[9] A D Dongare and A D Kachare ldquoPredictive tool an artificialneural networkrdquo International Journal of Engineering and Inno-vative Technology (IJEIT) vol 2 pp 209ndash2014 2012
[10] P Qin Y Shen J Zhu and H Xu ldquoDynamic analysis ofhydrodynamic bearing-rotor system based on neural networkrdquoInternational Journal of Engineering Science vol 43 no 5-6 pp520ndash531 2005
[11] A O Kurban and S Yildirim ldquoAnalysis of a hydrodynamicthrust bearing with elastic deformation using a recurrent neuralnetworkrdquo Tribology International vol 36 no 12 pp 943ndash9482003
[12] J Ghorbanian M Ahmadi and R Soltani ldquoDesign predictivetool and optimization of journal bearing using neural network
model and multi-objective genetic algorithmrdquo Scientia Iranicavol 18 no 5 pp 1095ndash1105 2011
[13] M Simsir R Bayir andYUyaroglu ldquoReal-timemonitoring andfault diagnosis of a low power hub motor using feedforwardneural networkrdquo Computational Intelligence and Neurosciencevol 2016 Article ID 7129376 2016
[14] B Samanta K R Al-Balushi and S A Al-Araimi ldquoBearingfault detection using artificial neural networks and geneticalgorithmrdquo Eurasip Journal on Applied Signal Processing vol2004 no 3 pp 366ndash377 2004
[15] M Subrahmanyam and C Sujatha ldquoUsing neural networks forthe diagnosis of localized defects in ball bearingsrdquo TribologyInternational vol 30 no 10 pp 739ndash752 1997
[16] K M Saridakis P G Nikolakopoulos C A Papadopoulos andA J Dentsoras ldquoIdentification of wear and misalignment onjournal bearings using artificial neural networksrdquo Proceedingsof the Institution of Mechanical Engineers Part J Journal ofEngineering Tribology vol 226 no 1 pp 46ndash56 2012
[17] S G Tores C Bonello and P Bonello ldquoEmpirical identificationof the inverse model of a squeeze-film damper bearing usingneural networks and its application to a nonlinear inverseproblemrdquo Journal of Vibration and Control p 22 2016
[18] S Morishita and T Ura ldquoER fluid applications to vibrationcontrol devices and an adaptive neural-net controllerrdquo Journalof Intelligent Material Systems and Structures vol 4 no 3 pp366ndash372 1993
[19] R Jha and C h He ldquoAdaptive neurocontrollers for vibrationsuppression of nonlinear and time varying structuresrdquo Journalof Intelligent Material Systems and Structures vol 15 p 11 2004
[20] S Y Chen Y C Hung Y H Hung and C H Wu ldquoApplicationof a recurrent wavelet fuzzy-neural network in the control of amagnetic-bearing mechanismrdquo Computers Electrical Engineer-ing vol 54 pp 147ndash158 2016
[21] P-Y Couzon and J der Hagopian ldquoNeuro-fuzzy active controlof rotor suspended on active magnetic bearingrdquo Journal ofVibration and Control vol 13 no 4 pp 365ndash384 2007
[22] C R Burrows P S Keogh and M N Sahinkaya ldquoProgresstowards smart rotating machinery through the use of activebearingsrdquo Proceedings of the Institution of Mechanical EngineersPart C Journal of Mechanical Engineering Science vol 223 p 112009
[23] Q J Wang and Y Chung Encyclopedia of Tribology SpringerBoston Mass USA 2013
[24] A Kornaev L Savin E Kornaeva and A Fetisov ldquoInfluence ofthe ultrafine oil additives on friction and vibration in journalbearingsrdquo Tribology International vol 101 pp 131ndash140 2016
[25] S Haykin Neural Networks A Comprehensive FoundationPrentice Hall NJ USA 2nd edition 1999
[26] G A Korn and T M Korn Mathematical Handbook forScientists and Engineers Dover Publications New York NYUSA 2000
[27] F C Moon Chaotic Vibrations An Introduction for AppliedScientists and Engineers John Wiley and Sons New York NYUSA 1987
[28] L Cui and J Zheng ldquoNonlinear vibration and stability analysisof a flexible rotor supported on angular contact ball bearingsrdquoJVCJournal of Vibration and Control vol 20 no 12 pp 1767ndash1782 2014
[29] Y Wang and X Wang ldquoNonlinear vibration analysis for aJeffcott rotor with seal and air-film bearing excitationsrdquoMathe-matical Problems in Engineering vol 2010 Article ID 657361 15pages 2010
International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Rotating Machinery 11
[30] M G Salvadori and M L Baron Numerical Methods in Engi-neering Englewood Cliffs NJ USA 2nd edition 1961
[31] httpwwwgnuorgsoftwareoctave[32] httpwwwmathworkscomhelpnnetreffeedforwardnethtml[33] A Harnoy Bearing Design in Machinery Engineering Tribology
and Lubrication Marcel Dekker Inc New York NY USA 2003[34] A Chasalevris ldquoAn investigation on the dynamics of high-
speed systems using nonlinear analytical floating ring bearingmodelsrdquo International Journal of Rotating Machinery vol 2016Article ID 7817134 22 pages 2016
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of