-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
1/849
SID 65-1317
APOLLO
OPERATIONS
HANDBOOK
COMMAND AND
SERVICE
MODULE.
SPACECRAFT 012
Prepared Under Direction
of
FLIGHT CREW SUPPORT DIVISION
NASA-MSC MISSION OPERATIONS BRANCH
/-
N O R T H
SPACE and
A M E R I C A N
INFORMATION
A V I A T I O N , INC.
SYSTEMS DIVISION
I
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
2/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
3/849
SM2A- 03-SCOlL
APO LLO OPERA TIONS HANDBOOK
NOTE: The portion of
the t ex t
alfrcted
by
the current chanRcs
i s
indicated
by a
\enical l ine
an
the
outer
marlins of the
page.
LIST OF
EFFECTIVE
PAGES
TOTAL
NULIBER
O F PAGES I N THIS PUBLICAT ION IS
816,
CONSISTING OF THE
FOLLOWING:
P a g e P a g e
Ti t le
A thru E
i th ru x i i
1 - 1 t h r u 1-20
2-1 t h r u
2 - 2
2.1-
2.2-
2 . 3 -
2.4-
2.5-
2. 6-
2.7-
t h r u 2 . 1-10
t h r u
2. 2-48
t h ru 2 . 3-72
t h r u 2.4-38
t h r u
2 .
5-44
t h r u 2. 6-48
t h r u 2. 7-48
2.8- t h r u 2.8-70
L. 9- 1 t h r u 2.9- 38
2 . 10-1t h r u 2. 10-10
2 .
1 1 - 1
t h r u 2. 1 1 - 6
3 - 1 t h r u
3-212
4 - 1 t h r u 4-50
5-1
t h r u
5-20
6-1t h ru 6-52
7-1
t h ru 7-2
8-1t h r u 8 - 2
A-
1
t h r u
A - 6
CHANGE INFORMATION
This handbook is sub jec t to con t inuous change or rev i s ion
, on a p r i o r i t y
b a s i s , t o r e f l e c t c u r r e n t en g in e er in g o
r m is s io n c h a n g e s , o r to imp ro v e c on ten t
o r a r r a n g e m e nt .
Lis t of Effec t ive P age s , and by the fo llowing me an s
:
The con ten t and the changes a r e accounted fo r by the
above
Reco rd of Publ ica t ion :
i s s u e is l is ted on page B as a record of all ed i t ions
.
The publication date of each bas ic i s sue and each change
Page Change Date :
da te .
Each page in th is handbook has spa ce fo r en t e r ing
a
change
The la tes t pub l ica t ion da te wi l l be en t e red in th is
sp ace each t im e a page
is c ha n ge d f r o m th e b a s ic i s s u e .
*The
asterisk
indicates
pager
changed. added.
o r
dclctrd
by
the current change.
M a n u a l s w i l l b e d i s t r i b u t e d a s d i r e c t
ed
by
t h e N A S A A p o ll o P r o g r a m O ff i ce . A l l r e q u
e s t s f o r
m a n u a l s s h o u l d
be
d i r e c t e d to t h e N A S A A p o l l o S p a c ec r a H P
r o g r a m O f f i c e a t H o u s t o n , T ex as .
A
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
4/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
5/849
S.M2A -03-SCO
1 2
A P O L L O OPERATIONS
HANDBOOK
LATE TECHNICAL CHANGES
The i te m s l i s ted below rep res en t te chn ica l changes
which have been approved too
lat e for inc lusio n in the 12 Novembe r 1966 prin ting of the
Apollo Opera tio ns Handbook.
Source
M CR
A1735
MCR
1591
RE V 3 .
F E O
M-53025
( 10 - 13 -66)
MCR
A1733
( 1 0 - 1 1 -6 6 )
Descr i p t ion of Change
Change
S / M
RCS fu e l f r o m b len d ed h y d ra z in e
mix tu re to mo n o me th y lh y d ra z ine
Addi t ion of inv er t e r sync hro n ize r power pane l
wh ic h p ro v id e s c i r c u i t b re a k e r s fo r th e c o
n t ro l
of power to the phase sync hron ize r un i t.
T h i s is a n o m e n c l at u r e c o r r e c t i o n f o r t
h e
S-Ba nd switch on the MDC pane l s
No.
13 ,
2 3
and 26.
changes .
" P T T " , " O F F " a n d "VOX". T h e s wi tc h is
n ow ma r k e d
"OFF",
"OFF" a n d "T /R" .
T h i s c h a n g e i s r e q u i r e d due t o w i r in g
T h e S -Ba nd s wi tc h wa s ma rk e d
Modification of Cr ew Couch Lockouts . Th is
MCR re mov es the lockout so leno id ac tu a tor
a n d w i r e h a r n e s s f r o m t h e
X - X
a x i s s t r u t
lockout mechanism.
loc ko ut me c h a n i s m a s s e mb ly to f ix in th e
locked posit ion. T h e switc h on pane l No. 9
a n d t h e w i r e h a r n e s s a s s e m b l y o n th e s t r
u t s
wi l l b e r e m o v e d .
Add
a n
a d a p te r t o t h e
Section Affected
2 . 5
2 , 3
2 . 8 a n d 3
Miss i on Bas ic Da te 12 No v 1966 Change Date Pa ge D
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
6/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
7/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
8/849
SM2A
-03-SCO
12
APOLLO OPERATIONS HANDBOOK
T A B L E O F C O N T E N T S
S e c t io n T i t l e
1 GENERAL INFORMATIO N.
1 . 1
1 . 1 . 1
1 . 1 . 2
1 . 1 . 2 . 1
1 . 1 . 2 . 2
1 . 1 . 2 . 3
1 . 1 . 2 . 4
1 . 1 . 2 . 5
1 . 1 .
2 . 6
1 . 1 . 2 . 7
1. 1. 2.
8
1 . 1 . 2 . 9
1 . 1 . 3
1 . 1 . 4
1 . 1 . 5
1 . 2
1 . 2 . 1
1 . 2 . 2
1 . 3
1 . 4
Spacecr a f t 012 Configura t ion .
LES
A s s e m b l y .
Command Module
F o r w a r d C o m p a r t m e n t .
C r e w C o m p a r t m e n t .
S / C Co n t ro l s a nd D is p la y s
C / M M e c ha n ic a l C o n t r o l s
Cre w E q u ip me n t an d E q u ip me n t Ba y s
Food and Wate r
.
Wa s te Ma n a g e me n t .
Su
v v a1 Eq uipm ent
.
Aft Co mp a r tme n t
Ser v ice Module
.
S p a c ec r a f t L E M A d a p t e r .
S p a c e cr a f t S y s t e m s
.
Launch Vehic le Configura t ion .
S -1 B Bo o s te r
S-IVB Second Stage .
Mission 209A Weight Status .
Pos t land ing and Recover y
.
2 SYSTEMSDATA .
2 .1
2 . 1 . 1
2 . 1 . 2
2 . 1 . 3
2 . 1 . 4
2 . 2
2 . 2 . 1
2 . 2 . 2
2 . 2 . 2 . 1
2 . 2 . 3
2 . 2 .3 . 1
2 . 2 . 3 . 2
2 . 2 . 3 . 3
2 . 2 . 4
2.2. 5
2 .2 . 5 .1
2 . 2 . 5 . 2
Guidance and Contro l
.
S y s t e ms In te r fa c e , Gu id a nc e a nd Co n t ro l
Co a s t in g F l ig h t .
P o we re d F l ig h t .
Atmo s p h e r ic F l ig h t .
Guidance and Naviga t ion Sy s te ms ( G & N )
In t roduc t ion .
F u n c t io n al De s c r ip t io n .
Op e ra t io n a l Mo d e s .
Ma jo r Co mp o n e n t /S u b s y s te m De s c r ip t io n
In e r t i a l S u b s y s te m .
Op t ic a l S u b s y s te m ,
Co mp u te r S u bs y s t e m
P e r fo rma n c e a n d De s ig n Da ta
Op e ra t io n a l L imi ta t io n s a nd R e s t r i c t io n
s
S I C Att i tude
IMU Op e ra t io n .
P a g e
1 - 1
1 - 1
1 - 1
1 - 4
1 -6
1 - 6
1 - 6
1 - 6
1 -1 2
1 - 1 5
1-15
1 - 1 5
1 -1 5
1-16
1-16
1-16
1 -1 6
1-19
1-19
1-19
1-19
2- 1
2 . 1 - 1
2 . 1 - 1
2 . 1 - 1
2 . 1 - 2
2 . 1 - 2
2 . 2 - 1
2 . 2 - 1
2 .2 -1
2 .2 -7
2 .2 -1 1
2 . 2 - 1 1
2 .2 -1 3
2 .2-16
2 .2 -4 0
2 .2-40
2 .2 -4 0
2 . 2 - 4 1
. . .
Mis s io n Ba s ic Da te l 2 1 9 6 6 Ch a n g e Da te P a g e
111
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
9/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
10/849
SM2A -03-SCO12
APO LLO OPERATIO NS HANDBOOK
Sec t ion T i t l e
P a g e
2 .4 .3 . 1 Des ign Da ta
2 . 4 . 3 .2 P e r f o r m a n c e D a t a
.
2.4. 3. 3 Pow er Consumpt ion Da ta
.
2 . 4 . 3 . 4
SPS
E l e c t r i c a l P o w e r D i s tr i b ut i o n
.
2 . 4 . 4 O p e r at i o na l L i m i t a t i o n s a nd R e s t
r i c t i o n s
.
2 . 4 . 5 T e l e m e t r y M e a s u r e m e n t s
2 . 5 Reac t i on Con t ro l Sys t em (RCS)
.
2 .5 .1 In t roduc t i on
2 . 5 . 2 S / M RCS Func t i ona l Desc r ip t i on
.
2 . 5 . 3 S / M R C S M a j o r C o m p o n e n t / S u bs y s t
e m D e s c r i p ti o n
.
2. 5 . 3 .1
2 . 5 . 3 . 2 P r o pe l la n t S u b s y s te m
2 . 5 . 3 . 3 E n g i ne A s s e m b l i e s
.
2 . 5 . 3 . 4 P r e s s u r e V e r s u s T e m p e r at u r e M
e a su r in g S y s te m
.
2 . 5 . 3 . 5 E n g i ne T h r u s t in g L o g i c
.
2 . 5 . 4
2 . 5 .4 . 1 Des ign Da ta
2 . 5 . 4 . 2 P e r f o r m a n c e D a t a
.
2 . 5 . 4 . 3 P o w e r C o n s um p t i on D a t a S / M R C S
a nd G / M R C S .
2 . 5 . 4 . 4
2 . 5 . 5 . S/ M RCS Ope ra t i ona l L imi t a t i ons and Res
t r i c t i ons
.
2. 5 .6
2 .5 .7 C / M RCS Func t i ona l Desc r ip t i on
.
2 . 5. 8 C / M RCS Ma jo r Componen t s /S ubsys t em Desc r ip
t i on
.
2. 5. 8.
1
2 .5 .8 . 2 P rope l l an t Subsys t em
2 . 5 . 8 . 3 E n g in e A s s e m b l y
2 . 5 . 8 . 4 P r o p e l la n t J e t t i s o n
.
2 . 5 . 9 C / M R C S P e r f o r m a n c e a nd D e s ig n D a
t a .
2. 5 .9 . 1 Des ign Da ta
2 . 5 . 9 . 2 Pe r fo rm ance Da ta
.
2. 5 .9 . 3 Powe r Consumpt ion Da ta
.
2 . 5 . 1 0 C / M R C S O p e r a t i o na l L i m i t a ti o n
s a nd R e s t r i c t i o n s
.
2. 5. 10. 1 C / M
RCS
E l e c t r i c a l P o w e r D i s tr i b ut i on
2 . 5 . 1 1 C / M R C S T e l e m e t r y M e a s u r e m e n t
s .
2 . 6 E l e c t r i c a l P o w e r S y s t e m
(EPS) .
2 .6 . 1 In t roduct ion
2 .6 . 2 Func t i ona l Desc r ip t i on .
2 . 6 . 2 . 1 E n e r g y S t o r a g e
.
2 .6 .2 . 2 Pow er Gene ra t i on
.
2 . 6 . 2 .3 P o w e r C o n v e r s i on
.
2 . 6 . 2 . 4 P o w e r D i s tr i b ut i o n .
2 . 6 . 3
2 . 6 . 3 . 1 Cryo genic S tora ge
.
2 . 6 . 3 . 2 Ba t t e r i e s
.
2 .6 . 3 . 3 Fue l Ce l l Pow er Plants
.
2 . 6 . 3 . 4 I n v e r t e r s
.
P r e s
sur
za t i on Subsys t em
S / M R C S P e r f o r m a n c e a nd D e s i g n D a ta
S / M R C S E l e c t r i c a l P o w e r D i s tr i b ut i
on
S / M R CS T e l e m e t r y M e a s u r e m e n t s
P r e s s u r i z a t i o n S u b s y s te m
Majo r Component Subsy s t em De
s c
r ipt ion .
2 .4 -30
2 . 4 - 3 3
2 .4 -33
2 .4 -35
2 . 4 - 3 5
2 . 4 - 3 5
2 . 5 - 1
2. 5-1
2. 5-1
2 . 5 - 4
2 .5 -7
2 . 5-8
2 .5 -9
2 .5 -13
2 .5 -15
2. 5-16
2 .5 -16
2. 5-18
2 .5 -18
2 .5 -19
2 .5 -19
2 .5 -19
2 .5 -23
2 . 5 - 2 4
2 . 5 - 2 7
2 . 5 -28
2 .5 -30
2 .5 -34
2.5-39
2 .5 -39
2 .5 -41
2 .5 -41
2 .5 -41
2 .5 -41
2 .5 -41
2.6- 1
2 .6 -1
2 .6-1
2 .6 -1
2 .6 -2
2 . 6-2
2 . 6 - 2
2 .6 -5
2 . 6 - 5
2 . 6 - 6
2 .6 -12
2 .6 -17
Mis s ion Bas i c Da t e l 2 1966 Change Date Pa ge
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
11/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
12/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
13/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
14/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
15/849
S M Z A
-
0 3 - sc
0 1
2
APO LLO OPERA TIONS HANDBOOK
.
Section
-
T i t l e
P a g e
6 -6
6 - 6
6 -6
6-6
6 -7
6 - 8
6-9
6-9
6 -9
6 -9
6-9
6-9
6-12
6 -1 2
6-12
6 -1 3
6 . 4
6 .4 . 1
6. 4. 1 . 1
6 .4 .
1.
2
6 . 4 .
1.
3
6 . 4 . 1 . 4
6 .4 . 1 .5
6 . 4 . 2
6 . 4 . 2 .
1
6 . 4 . 2 . 2
6 . 4 . 3
6 . 4 . 3 . 1
6 . 5
6 . 5 . 1
6 . 5 . 2
6. 6
6 . 6 .
1
6 .6 . 2
6 . 7
6 . 7 . 1
6. 7.
2
6 .7 .2 . 1
6 . 7 . 2 . 2
6 . 7 . 3
6.7.3. 1
6 . 7 . 3 . 2
6 . 7 . 3 . 3
6 . 7 . 3 . 4
6 . 7 . 3 . 5
6 . 7 . 4
6 .7 .4 . 1
6 . 7 . 4 . 2
6 .7 .4 . 3
6 .
7.4. 4
6 .7 .4 . 5
6 . 7 . 4 . 6
6 . 7.4. 7
6 . 8
6 . 8 . 1
6 .8 .
1.
1
6 . 8 . 1 . 2
6 . 8 . 1 . 3
6 . 8 . 1 . 4
6 .9
6 .9 . 1
6 .9 . 2
6 . 9 . 3
S p a c e Su it As s e mb l y (GF P ) .
S p a c e S ui t Off o r S h i r t s l e e v e E n v i ro n me n
t
Co n s tan t We a r Ga rme n t .
F l ig h t Co v e ra l l s
Comm unica t ion s Soft Ha t
.
Co n s tan t We a r Ga r me n t E le c t r i c a l Ad a p
ter
Elec t r ic a l Umbil ica l "S leep" A dapte r .
Space Suit On Envir onm ent
.
P GA Un p re s s u r i z e d o r Ve n ti l a te d .
P GA P r e s s u r i z e d
PGA Descr ip t ion
PGA Components
PGA Stowage
To rs o and Glove S towage .
Helm et S towage
.
PGA Connecting Equipment .
P r e s s u r e G a r m e n t A s s e m b l y ( P G A ) E l e c
t r i c a l
A d a p t e r ( G F P )
.
Oxy ge n Ho s e (Umb i l i c a l ) (GF P )
.
C r e w C o u c he s .
C r e w C o u ch S t r u c t u r e
Cre w Co u ch P o s i t io n s
Occupied Pos i t ions
.
Unoccupied Po
sit
ons
Crew Couch Component Descr ip t ion .
H e a d r e s t .
B ack r e s t
A r m r e s t s .
S e a t P a n an d F o o t r e s t
C r e w C o uc h P a d s
Mechanica l Adjus tments .
He a d re s t Ad ju s tme n t s
A r m r e s t A d ju s tm e nt s
S e a t P a n Ad ju s tme n t D i re c t io n s
.
F o o t r e s t a n d F o o t s t r a p A d j u st m e n t s
.
D-Ring Handle Extension
Docking Pos i t ion A djus tment .
S h o u lde r S t ra p Ad ju s tme nt
.
C r e w m a n R e s t r a i n t s
High G-Lo a d Re s t r a in t s
.
C r e w m a n R e st r a in t H a r n e s s .
We ig h t l e s s Re s t ra in t
Guidance and Naviga t ion S tat ion Res t r a in t
Cre w ma n S le ep in g Re s t ra in t s
.
F l ig h t Data F i l e (GF P )
.
C o m m a n d e r ' s F l i g ht D a t a Fi le
S e n io r P i lo t ' s F l ig h t Da ta F i l e
P i lo t ' s F l ig h t Da ta
Fi le .
.
.
.
6-13
6-13
6 -1 3
6-14
6-15
6-15
6 -1 6
6 -1 7
6 - 1 7
6-18
6-18
6 -1 8
6-19
6 - 1 9
6-19
6-19
6-21
6-22
6-22
6-22
6 -2 3
6-23
6-23
6 -2 3
6 -2 4
6 - 2 5
6-26
6-27
6 -2 8
6-28
6-29
' l 2 1966 Change Date Pag e
X
M i s s on Bas i c Da te
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
16/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
17/849
SM. -4 0
3
-
S C
0
2
APOLLO OPERATIONS HANDBOOK
S e c t io n T i t l e P a g e
6 . 1 5 . 4 Descr i p t ion and Use of Su rv iva l Ki t
Components
.
6-47
6 . 15 .4 . 1 L i fe r a f t s 6-47
6 .
1 5 . 4 . 2 B e a c o n / T r a n s c e i v e r
.
6-47
6 . 1 5 .4 .
3
S u rv iv a l L ig h t s
( 2 ) .
6-48
6 . 1 5 . 4 . 4 S u rv iv a l G la s s e s
( 3 )
.
6-48
6 . 15 .4 . 5 Surv iva l Knives
( 2 )
.
6-49
6 . 1 5 . 4 . 6 W a t e r C a n s ( 3 )
.
6-49
6 . 15 .4 . 7 Desa l t ing Ki ts
( 2 )
P l u s T a b l e t s ( 1 6 ) . 6-49
6 . 1 5 . 4 . 8 E me rg e n c y Me d ic al S u rv iv a l K
it
.
6-49
6 .
1 5 . 5 S e a W a t e r P u m p
( C F E )
. 6-49
6 . 1 6 Stowage 6-50
7 SYSTEM SCHEMATICS . 7 - 1
Miss ion Bas ic Da te 12 Nov 1966 Change Date Page xi i
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
18/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
19/849
SMZA -03-SCO12
APOLLO OPERATIONS HANDBOOK
GENER AL INFORMATION
Q-BALL (NOSE CONE)
PITCH CONTROL MOTOR
JETTISON
MOTOR
LAUNCH ESCAPE
MOTOR
STRUCTURAL SKIRT
LA UNC H ESCAPE TOWER
TOWER ATTACHMENT (4)
C O W N O MODULE
C/M TO
S/M
FAIRING
SERVICE MODULE
EPS RADIATOR
ECS RADIATOR
SPACECRAFT LEM
ADAPTER (SLA)-
S f 5
ENGINE EXPANSION NOZZLE
S I A
PANEL JUNCTION
(BETWEEN FWD A N D A f l
PANELS)
5-IVB INSTRUMENT UNIT
( S H W N AS REFERENCE)
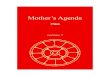
F i g u r e 1-1. Sp ac ec raf t 012 Configurat io n (Sheet 1 of
2 )
SPACECRAFT 012 CONFIGURATION
Miss ion
Bas ic Date 12 Nov 1966 Change Date P a g e 1 - 2
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
20/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
21/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
22/849
SM2A
-
0 3-SC 0 1 2
APO LLO OPERATIONS HANDBOOK
GENER AL INFORMATION
BREAKOUT PLUG
(FOR APEX COVER
r PILOT PARACHUTE)
LAUNCH ESCAPE TOWER
FORWARD HEAT SHIELD ATTACH MENT (TYPICAL)
(APW COVER)
NEGATIVE PITCH
OPTICAL S IGHTING ENGINES
PORTS
1
FWD VIEW1 N G
(RENDEZVOUS)
WINDOWS
CREW
POSITIVE PITCH
AFT HEAT SHIELD
\ I
\ I
^.. ..... .-^...
ID E W I N D O
(TYPICAL 2 PLACES)'
UMBI LI;AL'
u nATCnW""UW
ROLL ENGINES
(TYPICAL)
NOTE:
CENTER COU CH REMOVED FOR CLARITY.
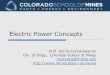
Figure 1- 3.
S p a c e c ra f t
0
1 2 Command Module
SM-2A-642F
SPA CEC RA FT 012 CONFIGURATION
1-5
Miss io n Bas ic Da te
l 2
1966 Change Date Pa ge
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
23/849
SMZA-03-SCO12
A P O L L O
OPERATIONS
HANDBOOK
GENERAL INFORMATION
1 .1 .2 . 1 F o rwa rd Co mp a r tme n t .
T he fo rwa rd c o mp a r tm e n t ( f ig u re 1 - 3 ) i s th e
a r e a o u t s id e th e fo rwa rd
acc es s tunnel , fo r wa rd of the c r ew compa rtm ent fo
rward bulkhead and i s
c o v e re d by t he f o rwa rd h e a t s h ie ld .
pe ri me te r of the tunnel contain the reco ver y equipment,
two negative-pitch
re a c t io n c o n t ro l s y s te m e n g in e s , a n d th e
fo rwa r d h e a t s h ie ld r e l e a s e
m e c h a n i s m .
of ea r t h landing ( reco ver y) sys tem components .
F o u r 9 0 - d e g re e s e g me n ts a ro u n d th e
Mos t of the equ ipment in the fo rwa rd com part men t cons is
ts
T he fo rwa rd h e a t s h ie ld , o r a p e x c o v e r ,
i s ma d e
of
b r a z e d s t a i n l e s s -
s tee l honeycomb and covered wi th ab la tive ma te r ia l
.
rec ess ed f i t t ings which perm it the launch escape tower to
be a t tached to the
C / M i n n e r s t r u c t u r e .
C /M a f t e r e n t ry o r a f t e r th e l au n c h e s c a p
e a s s e mb l y i s s e p a ra te d d u r in g
a n a b o r t .
s e c t io n 2.
)
It contains four
J e tt i s on th r u s t e r s s e p a ra te the a p e s c o v e
r f ro m th e
(F o r a dd i t io n a l in fo rma t io n , r e fe r
to
the sequent ia l sys tem s in
1 . 1 . 2 . 2 C r e w C o m p a rt m e n t.
T h e c r e w c o m p a r t m e n t o r i n n e r s t r u c t u
r e ( f i g u r e -1-3) i s a sea led
cab in wi th p res sur iza t io n main ta ined by the env
ironmen ta l con tro l sys tem
(ECS) . The com part men t , p r o tec ted by a hea t shie ld ,
con ta ins con tro ls and
d i s p la y s fo r o p e ra t io n of th e s p a c e c ra f t a
n d s p a c e c ra f t s y s t e ms ; c o nta ins
m e c h a ni c a l a d j u s t m e n t s f o r th e c r e w c o
u c h e s, r e s t r a i n t h a r n e s s a s s e m -
bl ies , ha tch cove rs , window shade s , e tc .
;
and is p rov ided wi th c rew
equipment, food and wate r , was te management p rov is i ons ,
su rv iva l equ ip-
me n t , a nd s cie n ti f i c e x p e r ime n t s eq u ipme n t
. Ac c e s s h a tc h e s , o b s e rv a t io n
windows , and equ ipment bays a r e at tached as pa r t of the
comp artm ent s t ru c tur e .
T h e c re w c o mp a r tme n t h e a t s h ie ld , l i k e th e
a p e x c o v e r , i s ma d e of
braz ed s ta in less - s tee l honeycomb and covered wi th ab la
t ive ma te r ia l . Th is
hea t sh ie ld, o r ou te r s t ru c tu re , con ta ins the S /C
umbil ica l connec tor ou t le t ,
ab la t ive p lugs , and a copper hea t s ink fo r the op t ic a
l s ight ing por ts in the
lower equ ipment bay , two s ide observa t ion windows, two forw
ard v iewing
windows,
and the ou te r
c o v e r fo r th e s id e a c c e s s h a tc h wh ich a l s o c
o n ta ins
an observa t ion window.
1 . 1 . 2 . 3
S / C Co n t ro l s a n d D is pla y s.
In format ion re la t ing to con tro ls and d isp lays fo r
opera t io n of the
s p a c e c r a f t an d i t s s y s t e m s i s provided in
section 3 .
1 . 1 . 2 . 4
C / M M e c h a ni c a l C o n t r o ls .
Mechanica l con tro ls ( f ig u re 1 -4 ) a r e p ro vid ed in
the c re w c o mp a r t -
ment fo r manu a l opera t ion of the c re w couch assem bly , s
ide acc ess hatch
c o v e r s , fo rwa rd a c c e s s h a tch c o v e r , a nd ma
n u a l o v e r r id e l e v e r s fo r th e
S P ACE CRAF T 012 CONFIGURATION
Mission Basi c Date
1 2
Nov 1966 Change Date P a g e 1 - 6
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
24/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
25/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
26/849
S M L A 0 3 - S C O
12
APOLLO OPERATIONS HANDBOOK
GENERAL
INFORMATION
FORWARD ACCESS HATCH COVER
EPS RECEPTACLE
(AFT SIDE
OF
M A I N
DISPLAY CONSOLE)
CONNECTOR
RACHET WRENCH
AIR OUTLET VALVE
(CLOSED POSITION)
CAUTION DECAL
LOCK PIN
OUTBOARD VIEW
0 OSTLANDING VENTILATION S Y S T E M (P L V )
@ FORWARD ACCESS HATCH
LOCK1 NC MECHAN I
SM
ACCESS HATCH FWD ACCESS
BREECH-LOCK HATCH COVER
IR I N L n
P O R T
CROSS-SECTION
VIEW
LANYARD (TO AFT i KAM
MTIEMIN ON LEFT
A ND CENTER COUCH)
SM-ZA-856A
F i g u r e 1-4.
C / M Me c h a n ic a l Co n t ro l s (S h e e t 3 of
3)
SPACECRAFT
12
CONFIGURATION
Miss ion Bas i c Da te l 2
1966
Change Date P a g e 1 - 9
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
27/849
SIM2 A - 0 3 - SC 0 1
2
APOLLO OPERATIONS HANDBOOK
G E NE RA L I N F
0
Rh4A T
ION
socke t a t one
end) is mounted on the cov er and wi ll bea r aga ins t
a
b ra c k e t
on
the tunnel wa l l . When tu rned by a handcrank or t o rque
wrench wi th a
5 /32- i nch dr i ve . the jac ksc rew wil l in tend and a l low
the cover to be ro ta ted
and removed . The cover i s ro ta ted by use of the ins ide
handholds o r the
outs i de by an i te m of GSE and can only be re t ri eve d f ro
m within the cre w
com par tm ent end of the tunnel.
1 . 1 . 2 . 4 . 5 Wind ows a n d S h a d e s .
FiL-e windows a r e p rov ided th rough the inner s t r uc t ur
e and hea t sh ie ld
of the
C / M :
two forw ard viewing, two s ide observ a t ion , and the c r ew
acc es s
ha tch windows. (See f igure 1 - 3 . ) During orb i t a l f l
igh t , pho tographs of
ex te rna l o b jec ts wi l l be taken th roug h the v iewing
and ob serva t i on windows .
T h e in n e r w in do ws ( in c lu d in g th e c i r c u la r
in n e r h a tc h w in do w) a r e ma d e of
t e mp e r e d s i l i c a g la s s w ith 0. 25-inch- th ick
double pan es , sepa ra t ed by 0 . 1
inch of sp ac e, and have
a
sof ten ing tempera ture po in t o f 2000F.
windows ( inc lud ing the sq uare o u te r ha tch window) a r e
made of am orpho us
fused s il i con with a s ing le 0. 7-inch- th ick pane . Each
pane con ta ins
a n
a n t i r e f l e c t in g c o at in g o n th e e x te rn a l s
u r fa c e , a n d h a s b l u e - re d re f l e c t iv e
c o at ing o n the in n e r s u r fa c e fo r f i l t e r in g
ou t mo s t in f ra re d a n d a l l u l t r a v io le t
ra ys , a sof ten ing tem per a tu re poin t of 2 8 0 0 " F
,
and a m el ti ng point of
31
1 0 F .
S h a d e s a r e p ro vid ed fo r c o n t ro l l in g e x te rn
a l l igh t e n te r in g the C /M
T h e o u te r
th rough the t r iangula r fo r war d v iewing windows, the squ
are s id e observ a t ion
windows, and the c i r cu l a r inner ha tch window. The se
shades , ind iv idua l ly
d e s ig n ed fo r e a c h wind ow c o n f ig u ra t ion , a r e
ma d e of m y l a r f i lm wh ic h h a s
b e e n h e a t - t r e a te d to ro l l up when no t he ld f la
t . The shad es a r e opaque fo r
z e ro lig h t t r a n s mi t t a l , h a ve a n o n re f l ec t
iv e in n e r a lu min iz e d s u r fa c e , two
s n a p fa s t e n e r s a n d fa b r i c h a n dle s fo r a t t
a c h in g o r r e mo v in g f ro m a p a r t i c -
u la r window, and a 3 /4 - inch s t r i p of Ve lc ro hook m at
e r ia l a round the ou te r
sur fa ce fo r ho lding the shade aga ins t the Ve lc ro p i le
a round the pe r im ete r of
the window.
If d e s i r e d , a shade can be pee led back f r om the V elc
ro p i le
m at er i a l and s towed in place on one s ide of he
window.
1. 1.
2 . 4 . 6
C ab in P r e s s u r e C o n tr o l s.
T wo c o n t ro l l e v e r s fo r ma n u a l ly o p e ra t in g
the E CS c a b in p re s s u re
re l ie f va lves a r e loca ted near the C/ M le ft couch and
le f t s ide window.
f i g u r e 1 - 4 . )
ing and c los ing the redundant s ide s of the au tomat ic cab
in p res su re regu l a to r .
(For a d di t io n al in fo rma t io n , r e fe r to th e e n v
i ro n me n ta l c o n t ro l s y s te m in
sec t ion
2 . )
( S e e
T h e s e l e v e r s a r e p r ov i d ed a s a m e c h a n i ca
l o v e r r i d e f o r o p en -
1 . 1 , 2 . 5
Cre w Equipment and Equipment Bays .
E a c h c r e w m e m b e r h a s p e r s o n a l a n d a c c e
s s o r y e q u ip m e n t p r o vi d e d f o r
h i s u s e in th e c re w c o mp a r tme n t .
s i s t of a p r e s s u r e g a r m e n t a s s e m b l y ( P G
A ) with a t tach ing hose and
u mb i l i c a l , a c o mmu n ic a t io n s a s s e m b ly
,
a
c o n s ta n t -we a r g a rme n t , b io -
me d ic a l s e n s o r s , a n d ra d ia t ion d o s i me t e r
s . lMajor i t e m s of a c c e s s o r y
equipment sha red by the c re w cons is t o f an in -f l igh t
tool se t and a med ica l
k i t . ( F o r a d e ta i l e d l i s t of c re w e q u ip me n
t, r e fe r to s e c t io n 6 . ) (Spec if ic
i t e m s c o n ta ine d in th e
C / M
e q u ip me n t a n d s to ra g e b a y s a r e l i s t e d in f
ig u re 1-6 .
)
Ma jo r i t e m s of p e r s o n a l e q u ip me n t co n -
SPACECRAFT 012 CONFIGURATION
Mis s io n Ba s ic Date l 2
1966
Change Date P a g e 1 -1 2
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
28/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
29/849
-
FORWARD REFERENCE
VIEW
LEFT-HAND FORWARD EQUIPMENT BAY (LHFE
-
1
2
3
4
5
6
7
B
9
IO1
12
13
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
30/849
+X
2
3
Ga
chronotopmph
4
Flight
qwlifisotim
t o p
n c o d r
5
Scientific q u i p m m p m n m t
A
6
Display/ot i i tde gyrrroccda-eter
(EU)
7
Food
itoras.
(5
containen)
8 A W t h g y r o ond ocalem-mter
9 b t . gym
IO
CWpl ing
ond
d i i p k y pnl
1I
I2
13 IMU
M t m l p w l
14
Liphting cont ml
15
16
17
Pallonding ECS
m a r m b l a
18
Fo-d OCC.L(
hatch
(nf)
19
Sox~ont
l a c o p
eyepieca s t o w
20 Sextont ond t e l a c o p
1
21
Computer display
and
control
p m l
22 G 6 N c on t ro l panal IMU
23
S u ni v ol p m r i i i o n
(nf)
24
25 P a r ono o l l m b l y ( P U )
?6 Doto s t o w q u i p e n t
s p c w i t
S~OWOQ*bop ond
sc ient i f ic .qu ipen(
i t o r q e (,,I
Sr pi lo t wi t mnnector p n c l o nd cl ec tr ic ol e ~ n ~ c t
o rno
Cab in
air m c i r w l o t i m b n
( reo
F O I W O ~ c w
ha tch c wer
(nf)
Patloding ECS air outlet duct
Cl in ico l monitoring nst-mi wt comportment
27
Towel
s t o m g .
28 Sigml
mnd i twn ing .qu ipen t
29
VHF mr l t i p l ue r
30 Dot0
wi r i n g
31
P r d v l o t i m
OIOC-I
32
VHF ncore ty
&con
ond
VHF-AM tmrun i t t emc e i re r
33
Audio
ceniar
34 Centml timing
35
TV optics
rtom~e
re f )
36
h l u - c d e m o d u l o t i o n ( K M )
unit 2
t el anet r, q u i p e n t
37
38 h l w - c d a m d u l a t i c m
(PCM)
unit
I
l e l m e t y
q u i p . n t
39 Scientific q u i p e n t
ewoprrmont C
40
S - b o d
-.I onpl i f ier
41
C - b o n d t m n p a d . r
42
C@
ob.orb.r
mntoiwr (mf)
43
U
Digitol up-ho link
45
Unifid
$-bond e q u i m n t
46 Fecal
coni iter b i t i d )
47
Scientif ic quipnent mmporrmmt 8
48 &I1 c h o m l E D ,
49
Dolo
pcLog * conlo iner
lolm
m
wtbood
couch
ha )
50
G I N c a p u t e r
51 Pitch chonn.1 E D ,
52 A u x i l i o y
E D ,
VHF-FM
Imrunittar ond
HF tmrrrceivar
Food and
rort
table (in-flight tDol set)
Y a w channel E t *
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
31/849
41
C- bond t m npwd. r
42
CQ oborbr cm t o in r ( re f)
43
U
Dipitol up-doto
lint
45 Unified
S - b d
q u i p e n t
46 Fecal coni i ter
h i t i d )
47
4E bl l c h o m l t U
4 9
h t o pockog .
COnto in r (01.0
m w t k d
ouh
ha )
50 G h N c m p u t e r
51
Pitch
chonnel
E C *
52 A u r i l i o y E a
9 Yor3PmeI EU
F d
d o k
toble
(in-flight
tml
u t )
Scirntific e q u i m n t m m p O m m t B .
I
RIGHT-HAND FORWARD EQUIPMNT B A Y ( R HF E B) A N D R I G H
1
C@ obs0rb.r c o n b i w r
(n9
2
W a l e mampnnsnt
sn1.m
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
32/849
SMZA-03-SC012
POLLO OPERATIONS HANDBOOK
G E N E F AL
INFORMATION
,
\
'\\
(RHFEBI AND RIGHT-HANDEPIJIPMENT B AY (RHEB)
I 7
I 8
I9
20
ZI
21
21
24
25
26
Z?
29
n
F i g u r e 1-6.
C / M E q u i p m e nt and Stowage Bays
P A C E C R A F T 012 CONFIGURATION
p a g e 1 - 1 3 / 1 - 1 4
Miss on Basic Date
l 2
1 9 6 6 Change Date
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
33/849
SMZA -03-SCO 12
AP OL L O
OPERATIONS
HANDBOOK
GEN ERA L INFORMATION
1.1 .2 .6
1. 1.2.7
1 .1 .2 .8
1. 1 .2 .9
Food and Wate r .
Food and wate r p rov i s ions , including wa te r de l i ve ry
and food pre par a -
t io n eq u ip me nt , a r e a v a il a b le in th e c re w c o
mp a r t me n t L HE B a n d L E B
(f ig u re 1 -6 ) fo r the leng th of the miss ion .
by add ing wa te r to p las t ic bags con ta in ing the dehydra
t ed food and knead ing
th e mix tu re .
a s t r o n a u t .
Hot o r c old wa te r
is
ava i lab le
at
the po tab le wa t e r supply pane l
fo r food recons t i tu t ion .
a
f l e x ible h o s e f r o m th e wa te r d e l iv e ry u ni
t.
by-produc t o f the EPS fue l ce l ls .
F oo d ma y b e p re p a re d
Pr ep ar ed food can be squeezed d i rec t ly in to the mouth of
a n
Chi l led d r ink ing wate r
i s
suppl ied to the c r ew th rough
The potab le wa te r
i s a
Waste Management.
Wa ste ma n a g e me n t p ro v i s io n s in th e c r e w c o m
p a r tme n t R HF E B a nd
AESB (f igure 1 -6 ) cons i s t of equ ipment fo r co l lec t
ing , s te r i l iz i ng , and
s to r in g h u ma n fe c a l ma t t e r a n d p e r s o n a l h
yg ien e wa s te s ( s u c h a s u s e d
c leans ing pads , towel s , e tc . ). F e c a l m a t t e r a n
d p e r s o n a l h yg ien e wa s te s
a r e co l lec ted in po lyethy lene bags , d is in fec ted ,
and s to red in a v e n te d a re a .
Ur in e i s e x p e l l e d o v e rb o a rd in to s p a c e
.
Surviva1 Equipm ent.
T h e s u rv iv a l k i t s s towe d in th e c re w c o mp a r
tme n t RHF E B (f ig u re 1 -6)
a r e ava i lab le fo r the pos t land ing phase of the mis s
ion ( land or wa t e r) . The
ma jo r i te ms con ta ined in each k i t inc lude 6 pounds of w
a t e r , a d e s a l t e r k i t ,
a
o n e -ma n l i f e r a f t , r a d io t r a n s c e iv e r , p
o r t a b le l ig h t , s u n g l a s s e s , a n d a
m a c h e t e .
in th e space su i t s towage bag dur ing the o rb i t phase of
the miss i on .
(See
f ig u re 1 -6 . )
Life ves t s worn by the c r ew dur ing l if t -o ff and en try
a r e s towed
Aft Compartment .
T h e a f t c o mp a r tme n t ( f ig u re 1 -3 )
i s
t h e a r e a e n c o mp a s s e d by th e aft
T h is c o m p a r tme n t c o n ta in s 1 0 re a c t io n c o n
t ro l
p o r t io n of th e c r e w c o m p a r tme n t h e a t s h ie
ld ,
a f t hea t sh ie ld , and a f t por t ion
of the p r im a ry s t ru c tu re .
e n g in e s , a n imp a c t a t t e n ua t io n s t ru c tu re
, in s t ru me n ta t io n , a nd s to ra g e t a n k s
f o r
wa te r , fu e l , o x id iz e r , a n d g a s e o u s h e l iu
m. (F o u r c ru s h a b le r i b s , a lon g
t h e S / C +Z x i s , a r e provided as pa r t of the impac t a
t tenua t ion s t r uc t ure to
abs orb energy dur ing a land imp ac t .
)
The a f t hea t sh ie l d , which enc loses the la rg e end of
the C/M , i s a
s h a l low s p h e r i c a l ly c o n to ure d a s s e mb ly .
It i s made of the s am e type of
m a t e r i a l s
a s
o th e r C / M h e a t s h ie ld s . Ho we v e r , th e a b la t
iv e ma te r i a l o n
th i s h e a t s h ie ld h a s a g r e a t e r th i c k n e s s
fo r th e d i s s ip a t io n of h e a t d u r in g
e n t r y .
C / M t o t he
S / M .
E x te rn a l p ro v i s io n s a r e ma d e o n th i s h e a t
s h ie ld fo r c o nn e ct ing th e
~~
SPACECRAFT 01 2 CONFIGURATION
Mi s s io n Ba s ic Date l 2 1966 Change Date Pag e ' - I 5
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
34/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
35/849
SMZA
-03-SCO 12
APOLLO OPERATIONS HANDBOOK
--
GENERAL INFORMATION
I D I Z E R T A N K
ECS SPACE
ECS SPACE RADIATOR
EPS SPACE RADIATOR
SECTOR 4
( S K IN P A R T IA L L Y R E M O V E D
F O R
CLARITY)
C / M recton ( top v i e w )
SPS ENGINE /
E X P A N SI O N N O Z Z L E
1 and 4 are 50-degree s ec ton
2 and
5 ore
70dagree recton
3
and
6 am
&)-degree s ec ton
SERVICE MODULE ITEMS
S e c t o r 1
E l e c t r i c a l p o w er s y s t e m s p a c e r a d i a t o
r
S u p e r - c r i t i c a l o x y ge n t a n k
(two)
S u p e r - c r i t i c a l h y d r o g e n t a nk (two)
S e c t o r 2
E n v i r o n m e n t al c o n t r o l s y s t e m s p a c e r a
d i a t o r
S e r v i c e p r o p u l s i o n s y s t e m o x i d i z e r t
a n k
R e a c t i on c o n t r o l s y s t e m p a c ka g e ( + Y - a
x i s )
S p a c e r a d i a t o r i s o l a t i o n v a lv e (two)
S e c t o r 3
S e r v i c e p r o p ul s i o n s y s t e m f u e l ta n k
R e a c t io n c o n t r o l s y s t e m p a c k a g e ( t Z - a
x i s )
S e r v i c e p r o p u l s i o n s y s t e m h e l i u m t a n
k s ( two)
S e c t o r
4
E l e c t r i c a l p o w er s y s t e m s p a c e r a d i a t o
r
F u e l c e l l p o w e r p la n t ( t h r e e )
H e l i u m s e r v i c i n g p a n e l
R e a c t i o n c o n t r o l s y s t e m c o n t r o l u n i
t
E l e c t r i c a l p o w e r s y s t e m p o w e r c o n t r o
l r e l a y b o x
S e r v i c e m o d u l e j e t t i s o n c o n t r o l b a t t
e r y ( two)
S e r v i c e m o d u l e J e t t i s o n c o n t r o l l e r s
e q u e n c e r ( t wo )
W a t e r s u p p l y t a n k ( t w o )
S e c t o r 5
E n v i r o n m e n ta l c o n t r o l s y s t e m s p a c e r a
d i a t o r
S e r v i c e p r o p u l s i o n s y s t e m o x i d i z e r t
a n k
R e a c t i on c o n t r o l s y s t e m p a c k a g e
( - Y
a x i s )
S e c t o r 6
S p a c e r a d i a t o r s e l e c t i o n v a l v e ,
(two)
G l y c o l s h u t o f f v a l v e s
(two)
R e a c t io n c o n t r o l s y s t e m p a c k a g e ( - Z a x
i s )
S e r v i c e p r o p u l s i o n s y s t e m f u e l t a n
k
C e n t e r s e c t i o n
S e r v i c e p r o pu l s i o n s y s t e m h e l i u m t a n k
(two)
S e r v i c e p r o p u l s i o n s y s t e m e n g i n e
SM-2A-643 E
Figure
1 - 7 .
Spacecraft 012 Service
Module
S P A C E C R A F T
0
12 CONFIGURATION
Miss ion
Ba s ic Da te,1 2 1966 Change Date Pag e
' - I 7
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
36/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
37/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
38/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
39/849
SM2A -03-SCO 1 2
A P O L L O OPERATIONS HANDBOOK
v
SYSTEMS D.4T-4
SECTION
2
SUBSECTION 2.1
GUID.4NCE .4ND CONTROL
2 . 1 . 1
SYSTEMS INT ERFA CE. GUIDANCE -4ND CONTROL.
2 . 1 .7
Apollo CSM a tm osph er ic and space f l ight i s ach ieved by
app l ica t ion of
contro l led t rans la t ion fo rces and ro ta t iona l fo r ce
mom ents . Guidance and
c o n t ro l in i t i a t e s an d t e rmin a te s th e th ru s
t a n d ro ta t ion a l fo rc e s a n d fo rc e
m o m e n ts a s
a
function of the mag nitude of the change r equ ired .
Guidance
and con t ro l p rov ides the fo llowing bas ic func t ions:
Atti tude Control
Guidance
Navigation
Atti tude con tro l i s a funct ion assoc ia te d wi th s pace
cra f t o r ien ta t ion
with r e s p e c t to a n in e r t i a l r e fe re n c e o r a
kn own c o o rd in a te s y s te m .
Guidance is a funct ion r equ ir in g a combination of a tt i
tud e cont rol with ra te
s tab i l iza t ion and s t ee r i ng command s fo r the purpose
of modify ing space-
c ra f t t r a j e c to ry v ia ma j o r v e lo ci ty c h a ng e
s .
space cra f t pos i tion and ve loc i ty , and pred ic ts fu tu
re posi t ion .
Naviga t ion de te rmines
To accomplish miss ion r equ ire me nts , the gu idance and nav
iga t ion ,
s t a b il i z a t io n an d c on t ro l , s e rv i c e pro p u
l s io n , a nd re a c t io n c o n t ro l s y s te ms ,
p lu s the a s t ro n a u t s , a r e in te g ra te d in to a n
a u to ma t ic /m a n u a l c lo s ed lo op
c o n t ro l s y s te m.
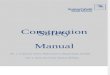
Guidance and con tro l ac t iv i ty is g rouped in to th r ee p
r of i le s of f l igh t :
c o a s t in g , p o we re d , a nd a tmo s p h e r ic . T h e p
r im a ry c o n t ro l lo o p s inv olve d
a r e i l l u s t ra t e d i n f ig u re s
2 .
1-1 th rough 2 . 1 - 4 .
abbrev ia ted in tegra t ion of a l l ma j o r e q u ip me n ts
n e c e s s a ry to a c c o mp l i s h
the ac t iv i t ie s in a l l th ree f l igh t p rof i le s
.
d iv ide the equ ipment in to the p roper pe rspec t ive fo r
eac h prof i le .
F i g u r e 2. 1 -
1
i s a n
F i g u r e s2 . 1 - 2 th rough
2 . 1 - 4
I t mus t be noted tha t in f ig u re
2 .
1-1 ,
th e loo p s a r e c lo s e d th a t
F or powered f l igh t ( P F ) o r
epr ese n t coas t ing f l igh t ( CF ) funct ions .
a tmo s p h e r ic f l ig h t ( A F ) , open the coasting fl
ight loops and close contacts
re p re s e n t in g th e d e s i re d lo o ps .
COASTING FLIGHT
The gu idance and con tro l ac t i v i t ie s invo lved in coas
t ing f l igh t a r e
accomp lished th rough the bas ic funct ional loops shown in f
igure
2 . 1 - 2 .
GUIDANCE -4ND CONTROL
Miss ion Bas ic Da te l 2 1 9 6 6 Change Date Page 2 * 1 - 1
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
40/849
SMZA - 0 3 - S C O
1 2
APOLLO OPERATIONS HANDBOOK
SYSTEMS DATA
The se loops p rov ide a t t i tude re fe renc e , a t t i tude
con tro l , a t t i tu de ho ld , and
a u to ma t ic a nd ma n u a l ma n e u v e r c a p a b i l i t
i e s n e c e s s a ry to a c c o mp l i s h the
s e v e r a l t a s k s inv olve d d u r in g c o a s t in g f
lig h t.
r e fe re n c e a nd c o n t ro l lo o ps re q u i re d fo r a l
l p h a s e s of flight.
T h ey a r e a l s o th e c e n t ra l
A r e fe re n c e a t t i tud e f r a m e i s e s t a b l i s h
e d by th e G & N i n e r t i a l m e a s -
ur em en t uni t ( IMU), an d / or by the SCS body-mounted a t t
i tude gyros
(BM AGs), and a t t i tude gyro coupl ing un it (AGCU). Ine r t
ia l se ns or s sens e
S I C m o ti o n c o n t r a r y t o th e r e f e r e n c e f r
a m e .
and ra tes a r e condi t ioned th rough se r vo e lec t ro n ics
and logic to in i t ia te
counte r mot io ns v ia the reac t io n je t con tr o l (RCS)
which nu l l i f ie s the o r ig ina l
motion. The 4 G C i n s e r t s a u to ma t ic c o n t ro l a n
d ma n e u v e r c o mma n d s in to
the loop . The ro ta t ion , t r ans la t io n , and a t t i
tude impul se con tro ls ins e r t
manua l com man ds in to the loop.
(F DAI) i s th e S / C a t t i tude v isua l d isp lay .
T h e s e n s e d a t ti t ud e e r r o r s
The f l igh t d i rec tor a t t i tude ind ica tor
2 . 1 . 3
2 . 1 . 4
POWERED FLIGHT.
P o we re d f ligh t i s c o n s id e re d th a t which w i l l
u s e th e S /M s e rv ic e
propuls ion sys tem (SPS) eng ine to in i t ia te a m ajo r ve
loc i ty change .
F i g u r e
2 .
1 - 3 i l l u s t r a t e s th o s e b a s ic loo p s n e c e s
s a ry fo r th e t a s k s in v ol \ , ed .
-4s shown, the loops a r e an ex tens ion of those requ ire d fo
r coas t ing f l ight .
Added,
a r e the (SP S) eng ine on-off th ru s t log ic and the SPS g
imb a l c o n t ro l
loops . In coas t in g f l igh t , a l l a t t i tude con tro l
is th rough the RCS. Powere d
f l igh t , by the SPS engine , req u ir es r o l l con t ro l
th rough the RCS, and p i tch
and yaw contro l by g imbal ing the
SPS
engine nozzle .
thr usti ng i s by the -4GC.
cont ro ls c an be used ins tead of o r to backup au tomat ic
func t ions .
-4
T
MOSP HE RI C
FLIGHT
P r im a r y c o n t rol of
However, f ig u re
2 .
1-3 show s how var ious manua l
Atm osph er ic f l igh t i s encou nte red dur ing the en tr y
phase of the
mis s ion a t which t ime the S / C e x p e r ie n c e s a e ro
d y n a mic fo rc e s .
F i g u r e
2 .
1-4 i l lu s t ra tes the bas ic loops requ ired fo r con tro l
of the S /C
d u r in g th i s p h a s e . T h e c e n t ra l lo o p i s id e
n t i c a l to tha t in f igure
2 .
1 - 2 .
T h e ma in d i f fe re n c e i s th a t s e r v ic e mo d u le
/c o mm a n d mo d ule ( S / M - C / M )
s e p a ra t io n h a s t a k e n p la c e ,
and the command module RCS sys tem is
u s e d .
An o th e r d i f fe re n c e i s th a t th e a e ro d y n a mic
fo rc e s w il l s t a b i l i z e th e C / M in
pitch and yaw,
and the en tr y g - leve l ( l i f t vecto:- con tro l ) wi ll i
nc r eas e o r
d e c re a s e th ro u g h ro l l c o n t ro l . P r im a r y c
o n t ro l i s au to ma t ic , w i th ma n u a l
ro ta t ion c o n t ro l a v a i l a b le , in exrent of au tom
atic con tro l malfun ction s .
Fo r de ta i led oper a t ion of the sev era l loops invo lved
in gu idance and
c o n t ro l ,
s u b s e c t io n
2 . 2 ,
and the stab i l iza t ion and con tro l sys tem , subsec t ion
2 . 3 .
re f e r to the desc r ip t i ons o f the gu idance and na\ .
iga tion sy s te m,
GUIDANCE AND CONTROL
Mis s io n Ba s ic Date l 2 1966 Change Date Page 2 . 1 - 2
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
41/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
42/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
43/849
C O W N D S DIRECT DECOUPLING
(FCSM THRUST ON -O FF
SENSING) COMM ANDS ROLL ERRORS
N A V I G A T I O N
SIGHT I
NG
ANGLES ATTITUDE E R R O R S
PF
$
- I+ -+PTICAL
----
I ,
-
4
F - ~ _ E E R I ~ ~ E ~ R ~
2z CF I
7 -
T
I
I
I
I
I
I
I
M A N U A L
A V SETTINGS
?
TO
AG C THRUST ON- OFF
G U ID A N C E A N D
N A V I G A T I O N C O N T RO L A G C
LOO PS (CF, PF, AF)
MANUAL c
SPS
ENGINE
.
THRUST
ON
ON-OFF AND
C O W N D S VELOCITY
SENSING
- sRK
-
-+I-----+
LOOP
(wl
PF
C O M M A N D S (GbN)
FROM
- -
- - ---
ATTITUDE AND
.I
CDU
SERVO
STEERI NG
C O M M A N D S
Ln l T U D E
- - - - - _ _ _
PITCH AND
Y A W E R R O R S
ATTITLID
CHANGES
ATTITUDE
C O W N O S
ELECTRONICS - - k-4
ND CONTROL
ClRCUlTS
FROM
IMU -
ATTITUDE
I
10 IMU SENSORS
A l~m
51
as
.
PF
t
L l
M i
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
44/849
S M 2 A
-03-sc012
A P O L ~
PERAT IONS HANDBOOK
cFsc
r-
1
SYSTEMS DATA
I
-J
AERODYNAMIC
$
F
A N U A L
DIRECT cFzr
LJLLAGE
C O M M A N D
FORCES
7;- oToONTROL AND ( (
RCS ATTITUDE C r T L
~ ~ ~ l ~ a
E R R O R S pF
CF JET SELECTION L m P ( C F , PF, AF)
STEERING- - - - - - E R R O R S SUMMING
SUMMING
JET CONTROL
LO GI C CIRCUITS
CIRCUITS CIRCUITS
THRUST
I ACCELERATION
A N D
T AF DIRECTION
DYNAMICS
t
I
PITCH AND
GIMML
i t - - SERVO
PF
I
I
PF
t
I
FORCE
+
TO
M N C
ELECTRONICS
(SCS)
SPS ENGINE
GIMBAL
CONTROL LOOP (PF)
TO
MTVC
ELECTRONICS
4
I
I
1
OLL
T p J
w T ATE
I
-L
CF
I
I
PITCH,%-AW
I
RATES
I
I
BhUC
FROM FROM
1
T f f
1
OLL
CF
T p J
1, w T ATE
I
-L
I
I
T P i T i H ~ A W
I
RATES
I
I
BhUC
FROM FROM
.
BACK UP ATTITUDE RO LL
RATE (BMA GS) RATE
(SCS)
scs
GYRO
FROM
BM AG S ATTITUD E REFERENCE (ARS),
FRO M INERT IAL SENSOR, DISPLAY,
RATE A N D FEEDBACK
LOOPS
GYROS (CF, PF, AF)
FROM
A G C U
TORQUE
- - -
-I-f f
I
ATTITUDE
RATE
GYROS
ORBITAL RATE
LOCAL VERTICAL
~~
ATTITUM CHANGES
VELOCITY CHANGES
SM-2h-947
Figure2.
1 -
1 .
Integrated Flight Profile Functional Flow Diagram
GUIDANCE AND CONTROL
Mission Basi c Date
l 2
N? 1966 Change Date I P a g e 2 . 1 - 3 1 2 . 1 - 4
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
45/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
46/849
-
ROTATION
COMMANDS
________*
PROFORTIONb
AllllUM I
PATES
TOTAL
A n l T U [ W
-
I ATTITUDE
1
*
A N D LIMITING 4
f ADBAND
TTITUDE COMMANDS
I
(SCS)
I )
.
ATTITUDE ERRORS
M A N U
TRANS
C O M M
M N U M
ROTATION
C O W N O S
I
ATTITUDE
IMWLSE
CONTROL
(GAM
I
P
M
-b
------
ATTI
DISP
f
AGCU ARS
AT^
SENSORS
4-
EULER 4
OR
L O
REF
A l l
A L I G N
COMPUTER
I . ..
I
M
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
47/849
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
48/849
1
I
N A V I G A T I O N C O NTRO L L O O P
FROM NAVIGATIONS
OR UPLINK (MSFN)
' A G C
N A V I G A T I O N
A N D
GUIDANCE
~ R O G M ~
(
I
TIME
-c
VELOCITY I
HANGES
ACCELEROMETER
sPS
MANUAL DIRECT
AND
THRUST ON-O FF
ENGINE
(SK)
+ CONTROL
THRUST ON-OFF
C U A M A N D S (G61.I)
i
I
I
STEERING
C O W N D S
I
I
I
I
I I
A N D C O N TR O L
I ( G h W
ATTITUDE
I
I
I
COMMANDS
T
I
I 4 1
VELOCITY
CHANGES
FDA1 (SCS)7
ATTITUDE
-
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
49/849
1
I
I
M A N U A l
ROTATION 4
C O M M A N D S
RATION
ACCELEROMETER
SENSOR
MANUAL DIRECT
AND THRUST ON-OFF
C O M M A N D S
ENGINE
CONTROL
ON
ROTATION
C O M R O S
(SCS)
I
2
PSEUDO RATE
MODULATORULSE
(SCS)
-
I
ATTITUDE
*
1 AND L IMIT ING
i
I
I
I
R O LL ERRORS I DEADMND
ATTITUDE
COMMANDS
FDA1 (SCS)
ATTITUDE 4
T
I
r----+-
-
ATTITUIX
RATES
TOTAL
ATTITUDE
I
I
~
- . -
-
4
*
\
-c
4
MANUAL
TRANSLATION
C O M M A N D S
PROPORTIONAL
GIMBAL
POSITION ELECTRONI
CONTROLS
A N U A l
LIM
ATTITUDE ERRORS
I
I
ATTITUMRS
S E N S O R S
*
EF
2zGN
(W AG S) SCS ATTITUDE CHAN GES
VELOCITY CHAN GES
F
Mission
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
50/849
SM2A
-
0
3
-
SCO
12
APOLLO OPERATIONS HANDBOOK
SYSTEMS DATA
RCS ATTITUDE
C O N T R O ~
I
I
I
I
I
1
L O O P
M A N U A L
DIRECT
C O M M A N D
DIRECT CONTROL
c
MANUAL TRANSLATION
TRANSLATION
CONTROL ULLAGE
COMMANDS (SCS)
c
T R E A C T I O N A N D 1
ORCE
JET
REACTION
CONTROL
JET SELECTION ~ (S/MRCS)
'
PSEUDO RATE
e
PULSE
(SC9
LOGIC (SCS)
ODULATOR -C
- 1
J -
GIMBAL
POSITION
SENSORS
*
66)
.
G I M B A L
POSIT ION
CONTROLS
ELE CTRON1
CS
1 I
SPS ENGINE GIMBAL
CONTROL LOOP
.
GIMBAL ENGINE
C O N T R O L G I M A L
ELECTRONICS CONTROL
G I M B A L -
SERVO
ELECTRONICS
-
(SCS)
(SCS) (SPS)
c
'
R A T E
GIM A L
SENSORS
( S P n
-
I
I
I
TORQUE
I
THRUST
ACCELERATION
A N D
THRUST
DIRECT
ION
OR
TORQUE
n
ATTITUDE REFERENCE, INE RTI AL SENSOR,
DISPLAY, AND FEEDBACK LOOPS
GUIDANCE AND CONTROL
Basic
Date 12 Nov 1966 Change Date page
2.
1 - 7 / 2 . 1 - 8
Miss ion
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
51/849
I
I
I
I
I
I
I
I
I
I
I
I
I
I
VELOCITY I
CHANGES
I
-
I
I
I
I
I
I
I
I
I
I
I
I
I
VELOCITY
ATTITUDE
CHANGES CHANGES
I
AUTOMATIC GUIDANC E
AND I
N A V I G A T I O N C O NT RO L LOOP I
A G C
N A V I G A T I O N
A N D
GUIDANCE
PROGRAMS
( G W
N A V I G A T I O N
S IG H TIN G
ANGLES
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
ERROR
1
STEER
ATTITUDE
RATES
1
ATTITUDE
31
TTITUDE
L
I
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
52/849
3
M A N U A L R O T A T I O N
ROTATION CONTROLS .
COMMANDS (SCS)
TTITUDE
I
I
I
1
I
I
I
PITCH/YAW
E R R O R
D E C O U P t l N G
-
.
I
ATTITUDE
i *
+
- STEERING ERRORS 1 DEADBAND
A N D L I M I T I N G
-
(SCS)
I
-
h
ARS
ATTITUDE
REF
-
SENSORS
A G C U
EULER
COMPUTER
-
-
A T 1
ATTITUDE
RATES
(BMAGS) SCS,
ATTITUDE
I+
ROPORTIONAL
MANUAL
C O M M A
,
PSEUD
PULSE
MODU
.------------------
ATTITUDE REFERENCE, INERT
DISPLAY, AN D FEEDMCK LO
$MAG
1ACKUP
UTE
M i s s on
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
53/849
SMZA-03-SC012
APOLLO OPERATIONS HANDBOOK
SYSTEMS
D A T A
4
1
RCS A l l lTUDE CONTROL I
L O O P
I A E R O D Y N A M I C
IRECT CONTROL
. MAN UAL DISABLE
C O W N D S
-
f i
I FORCES
I
I
PSEUDO RATE REACTION
PULSE JET SEL ECT ION LL A R O T A T I O N
MODULATOR LO GIC (SCS)
(scn
JET CONTROL
14
- (C / M R C 9 I
-----C
SENSOR,
U Y , A N D R E D M C K LOOPS
SPACECRAFT
DYNAMJCS
A
O T A T I O N
ATTITUM CHANGES
VELOCITY CHANGES
SM-24-943
Figure 2. 1-4.
Atmospheric Flight Profile Functional
Flow
Diagram
GUIDANCE AND CONTROL
Basic Date
l 2 Nov
1966 Change Date Pa ge 2 . 1
-9/2.1-10
Miss on
3
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
54/849
SMZA-03-SCO 1 2
APO LLO OPERATION S HANDBOOK
SYSTEMS DATA
SECTION
2
SUBSECTION
2 . 2
GUIDANCE AND NAVIGATION SYSTEM ( G & N )
2 .2 .1
2 . 2 . 2
INTRODUCTION.
The guidance and navigation (G&N)s y s t e m m e a s u r e s
s p a c e c r a f t
a t ti tud e a n d v elo ci ty, d e te rmi n e s t r a j e c t o
ry , c o n t ro l s s p a c e c ra f t a t t i tu d e ,
con tro ls the th r us t vec tor of the se r v ic e p ropuls ion
eng ine , and prov ides
abor t in format ion and d isp lay da ta .
ve loc i ty and pos it ion , and computa t ion of the t ra j ec
to ry p ar am et e r s i s
a c c o mp l i s h e d
by
the manned space f l igh t ne twork (M SFN).
P r im a r y d e te rmin a t io n of th e s p a c e c r a f
t
T h e G & N s y s te m c o n s i s t s of th re e s u b s y
s te m s a s fo l lo ws:
0 In e r t i a l s u b s y s te m (ISS)
0 Co mp u te r s u b s y s te m (CS S)
0 Op t ic s s u b s y s te m
(OSS)
T h e in e r t i a l s u b s y s te m is composed of an ine r t
ia l mea sur em ent un i t
(IMU),
p a r t o f th e p owe r a n d s e rv o a s s e mb ly (P S A) ,
p a r t of th e c o n t ro l s a nd
disp lay s , and th re e ine r t ia l coupl ing d isp lay un i
ts (CDUs) .
an ine r t ia l re fe r ence with a g imba led , t h r ee
-degree -o f- f reedom, gyro
s tab i l ized s tab le p la t fo rm .
The IlMU provides
T h e c o m p u t e r s u b s y s t e m i s composed of an
Apollo guidance com put er
(AGC), and two disp lay and keyboard pane ls (DSKYs ) , wh ic h
a r e p a r t of th e
contro ls and d isp lay s . The AGC
i s
a d ig i ta l comp ute r which pr oc es se s and
c o n t ro l s in fo rma t ion to a n d f ro m th e IMU a n d o
p ti c s , a n d s t o re s p ro g ra m s
a n d re fe re n c e d a ta .
T h e o p t ic s s u b s y s te m
i s
composed of a scanning te lesco pe ( SCT) , a
sex tan t (SXT), d r i ve mot or s fo r pos i t ion ing the SCT
and SXT, p a r ts of the
PSA, p ar t of the con tro ls and d isp lays , and two opt ics
CDUs. The SCT and
S XT a r e u s e d to d e te r min e th e s p a c e c ra f t po
s i tio n a n d a t ti tu de w i th r e l a t io n
t o s t a r s a n d / o r l a n d m ar k s .
T h e th r e e G&N s u b s y s te ms a r e c o n f ig ure d
s u c h th a t th e CSS a nd OSS
ma y be operated independently . Th is a llows continued use of
the CSS an d/ or
OSS in the event of a malfunction in one of the se su bs ys te
ms o r the ISS.
S y s te m p o we r re q u i re m e n t s a n d r e fe re n c e
s ig n a l s a r e p ro v ide d b y th e po wer
a nd s e r v o a s s e m b l y
(PSA) .
the command module lower equi pment bay ( f ig u re 2 . 2-1)
.
b r e a k e r s , caution and war nin g ind ica tor s , and one
of the
D S K Y s
a r e lo ca ted
on the m ain d isp lay conso le .
FUNCTIONAL DESCRIPTION.
Major components of the sys tem a r e loca ted in
S y s t e m c i r c u i t
The gu idance and nav igat ion s ys t em prov id es capab i l i
t ie s fo r the
f ol lowing:
0
0
Ine r t ia l ve loc i ty and pos i t ion (s t a te vec t or)
computa t ion
Opt ical and ine r t i a l nav iga t ion meas ur em ent s
GUIDANCE AND NAVIGATION SYSTEM
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
55/849
G
D
-
4
N
N
G
O
S
Y
M
2
.
2
-
2
M
i
s
s
i
o
n
B
c
D
e
1
N
1
C
D
e
P
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
56/849
SlM2A
-
0
3
-sco
1
2
APOLLO OPERATIONS HANDBOOK
SYSTE-MS
D-4T.A
0 S p a c e c ra f t a t t itu d e me a s u r e me n t a n d c o
n t ro l
Gen era tio n of guidance co mm an ds durin g CSXI-powered fl
ight and
C / L I a tmo s p h e r ic e n t ry .
0
The G & K sy s t em is in i t ia l ly ac t iva ted and a
ligned dur ing the p re launch
Du r in g th e a s c e n t p h a s e , th e s y s te m m e a s u
r e s v e lo c ity a n d a t t i tu d e ,
hase .
c o mp u te s p os i t io n , c o m p a re s th e a c tu a l s p
a c e c r a f t t r a j e c to ry wi th a p re
-
d e te rm in e d t r a j e c to ry , a n d d i s p la y s p e r
t in en t d a ta . T h e f ligh t c re \v u s e s
the d isp layed in format ion a s a n a id fo r d e c i s io n
to a b o r t o r c o n t in u e th e
mis s io n . Ho we v e r , s p a c e c ra f t c o n t ro l i s
main taine d by the S-IVB guidance
u n t il CSM/S -IVB s e p a ra t i o n . Upon s e p a r a t io n
, th e G&N s y s te m a s s u me s the
guidance and nav iga tion func t ions us ing the da ta acquir ed
dur ing a scen t .
During per iods when onboard ve loc i tv and /o r a t t i tude
change >ens ing
i s
n o t r e q u i re d , th e I l IU i s p la ce d in s t a n d b
y o pe ra t io n to c o n s e rv e e l e c t r i c a l
p o we r .
a l s o be p la c e d in s t a n d b y o p e ra t io n to c o n
s e rv e e l e c t r i c a l p o we r.
guidance a nd navigation function i s t o be re s t o re d ,
the
I l l U
and -AGC a r e
reac t iva ted , wi th the .AGC us ing the l a s t comp uted
veloc i tv as the bas is fo r
fur the r veloc itL com puta t ions , New pos i t iona l da t a
mus t be acquire d
i r o m
opt ica l s igh t ings
or
LISFN t h ro u g h t e l e me t r y o r v o ic e c o mmu n ic a
tio n s .
The
-AGC
i s
u s e d m o r e e x ten sive lx . th a n th e IUU , h o we v e r
,
i t
will
I\
hen
t h e
In i t ia l pos i t ion and a t t i tude in format ion a s we l
l a s pe r iod ic upda t ing o i
t h i s in fo rma t io n i s made th rough use of the op t ics
.
by the nav iga tor m aking two o r m o r e l a n d m a r k a n d
/ o r s t a r s i g h t in g s .
s ig h t ing s a r e ma d e b y a cq u i r in g th e s t a r - l
a n d ma rk w ith the S CT a n d l o r S XT .
When the v iewed ob jec t i s cen te r ed ,
a ma rk c o mma n d i s in i t ia t e d. T h e
-AGC
r e a d s th e o p t i c s a n g le s ,
11 , lU
a n g l e s ,
and t i me , in conjunc tion wi th in te rna l
p ro g ra m s , to d e te rmin e th e s p a c e c r a f t p o s
it io n. T h i s p o s i t io n in forma t io n
a n d th e s p a c e c ra f t v e lo c ity a r e u s e d to c o
mp u te a n e s t im a te d t r a j e c to ry .
The ac tu a l t ra jec tor : .
i s
c o mp a r e d w i th p re v io u s t r a j e c to r \ . d a ta
to g e n e ra te
t he t r a j e ct o r y e r r o r ,
i f
a n y, f o r f u r t h e r r e f e r e n c e . O p t i ca l m e
a s u r e m e n t s
a r e a l s o u s e d in a l ign in g th e I X I U t o a s p e c
i f ic r e fe re n c e o r i e n ta t io n .
T h i s i s a c c o mp l i s h ed
The
T h e
IM U
( f ig u re 2 . 2 - 2 ) c o n ta ins th r e e i n e r t i a l r
a t e in te g ra t in g g y ro s
( I RI Gs ) ,
t h r e e a n g ul a r d i f f er e nt i a ti n g a c c e l e r
o m e t e r s ( -ADAS), and th re e
pulsed in tegra t ing pendulous acc e l e r om et e r s (PIP-As)
. The IRIGs ,
PIP-As,
and one -ADA a r e mo u n ted o n th e s t a b le p la t fo rm
wh ic h is gimbaled to p r o -
v ide th re e d e g re e s o f f r e e d o m.
the middle g imbal .
the I RI Gs and
- l D - A s
in con junc t ion wi th e lec t ron ic s tab i l iza t i on
loops .
d isp lac ement of the p la t fo rm
is
sen sed by the IRIGs which produce output
s igna ls repre sen ta t i ve o f the magni tude and d i rec t i
on of d i s p la c e me n t .
AD-As s e n s e th e d i s p la c e me n t r a t e a n d pro d u
c e o u tp u t r a t e c o n t ro l s ig n a l s
to ma in ta in c o r re c t s t a b i l iz a t io n
loop
c o n t ro l r e s p o n s e .
s igna ls a r e a p p li e d to s e r v o a mp l i f i e r s ,
wh ich c o n di t io n the s ig n a l s to d r iv e
g imb a l to rq u e mo to rs .
p la t fo rm o r i e n ta t ion by driv in g the g im bals un t
i l the l R I G s igna ls a r e nul led .
T h e two re ma in in g -AD.As a re mo u n ted o n
T h e s t a b l e p l a tf o r m i n e r t i a l r e f e r e n c
e i s m a i nt a in e d 12)-
-An -
The
The IRIG and -4D.A
T h e g i m b a l to r q u e m o t o r s t he n r e s t o r e
the in i t ia l
GUIDANCE AND N.4VIG-4TIOK SYSTEll
2 . 2 - 3
Mis s io n Ba s i c Da te
12
~ O V966 Change Date Pa ge
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
57/849
SMZA-0
3 -SCO
2
A P O L L O
OPE RAT ION S HANDBOOK
SYSTEMS DATA
T h e P IP As a r e o r th o g o n al ly mo u nted a nd s e n s
e c h a n g e s in s p a c e c ra f t
ve loc i ty .
a r e re prese n ta t ive of the magni tude and d i rec t ion of
the ve loc ity change.
The ou tpu t s igna ls a re app lied to the ACC which uses the
in format ion to
update spa cecra f t ve loc i ty da ta .
wi th respe c t to the in i t ia l space cra f t pos i t ion and
t ra j ec tor y ,
enab les the
AGC to p rov ide cur ren t ve loc i ty , pos i t ion , and t ra
jec to ry in format ion .
An acce le ra t i on or de ce le r a t io n res u l t s in ou
tpu t s igna ls which
Continual updating of velocity in form ation,
The IMU a lso p r ov ides
a
s p a c e s t a b i l i z e d re fe re n c e fo r s p a c e c ra
f t
a t t i tude sen s ing and con tro l .
mo n i to r in g th e s p a c e c ra f t a t ti tu de w i th r e
fe re n c e to th e s t a b le p la t fo rm.
Re s o lv e r s a re mo u n te d
a t
the g imbal axes to p rovide s ign a ls represe n ta t ive
of the g imbal ang les . Ine r t ia l
CDUs
conta in res o lv ers which repea t the
p la t fo rm a t t i tude .
res o lv er ou tpu t s igna ls wi th the CDU res o lv er s igna
l s . If the ang les d i f fe r ,
e r r o r s i gn a ls a r e + g e n e r a t edand applied to the
s tabil i zation and control s y s -
t e m .
If
t h e a t ti tud e e r r o r i s l a rg e r th a n th e s e le c
te d d ea d ba nd l imi t s , t he
SCS f i r e s th e a p p r o p r ia t e RCS en g in e s.
T h e s p a c e c ra f t is rota ted back to
th e in i t i al r e fe re n c e a t t i tud e an d th e e r r o
r s ig n a l s a r e n u l le d (w i th in
deadband
l imi ts) .
Attitude change sensing i s accomp lished by
Atti tude monitoring is afforded by compar ing the
I X l U
The AGC prov ides au tomat ic execu t ion of comput e r p rog
ram s , au to-
mat ic con tro l o f
ISS
and
OSS
mo des , and, in conjunction with the DSKYs,
man ual cont rol of ISS and O S S modes and compute r d isp lays
.
con ta ins
a
two-pa r t m em or y which cons i s ts of a la rg e non-e rasab
le sec t ion
and
a
s m a l l e r e r a s a b l e s e c ti o n .
a n d s y s te m p ro g ra ms a nd o th e r p re d e te rm in e
d d a ta which a r e w i re d in
d u r in g a s s e mb ly .
Da ta r e a d o u t f ro m th i s s e c t io n
i s
non-des t ruc t ive and
cannot be changed during operatio n.
v id e s fo r d a ta s to ra g e , r e t r i e v a l , a nd o p
e ra t io n s up on me a s u r e d d a ta a n d
te le m e te re d in fo rma t io n . Da ta r e a d o ut f ro m
th i s s e c tio n i s d e s t ru c t iv e ,
p e rmi t t in g c h a n g e s in s to re d d a ta to be ma d e
a s d e s i re d .
wi th in the m em or y m ay be ca l led up fo r d isp lay on the
two DSKYs. T h e
DSKYs enab le the f l ight c re w to en t e r d a ta or ins t
ruc t ions in to the AGC,
requ es t d isp lay of da ta f rom .4GC m em or y , and offe r
an in te rru p t con tro l
of AGC operation.
v a r io u s f r e q u e n c ie s fo r in t e rn a l u s e a nd
to o th e r o n b o a rd s y s t e ms wh ic h
r e q u i r e a c c u r a t e or synchron ized t iming . Da ta
wi th in the AGC i s t ra ns -
mi t t e d to
,MSFN
th rough a "downl ink" te le metr y func t ion. Te le mete
red
d a t a i s t r a n s m i t t e d a s
a
function of an AGC pr og ra m or
b y
r e q u e s t f r o m
LMSFN.
function controlled by M S F N . The XGC performs guidance
functions b y
e x ec u ti n g in t e r n a l p r o g r a m s u s in g p r e d
e t e r m i n e d t r a j e c to r y p a r a m e t e r s ,
a t t i tud e a n g les f ro m th e in e r t i a l CDUs , v e lo
c ity c h a n g es f ro m th e
PIPAs,
a n d c o mma n d s f ro m the DSKYs (c re w ) to g e n e ra te
c o n t ro l c o mma n d s .
T h e n a vig at ion fu n c t io n i s p e r fo rme d b y u s
ing s t o re d s t a r - l a n d m a rk d a ta ,
op t ics ang les f r om the op t ics CDUs, and ve loc i ty
changes f ro m the PIPAS
in the execu t ion of nav iga tion pr ogr am s .
The -4GC
No n -e ra s a b le m e mo r y c o n ta in s mis s io n
T h e e ra s a b le s e c t ion of me mo r y p ro -
Informat ion
The
AGC
t iming sec t ion prov ides t iming s igna ls of
Data within the ACC ma y be updated through a n "uplink"
telemetr:;
GUIDANCE AND NAV IGATIaG. SYSTE M
..
2 .
2 - 4
' r . . .
. ..-
Miss ion Bas i c Da te l 2 1966 Change
DatB
'
'
P a g e
\
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
58/849
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
VISUAL
%E: 4 4 -
UNDMARKS
A N D H O R I ZON
I X U N N I O N
NOTES: I . AGC inpuh a d utpub
s h o r n
are
pment
at var iRn
t imes,
depcd i np
upan m o de
of opemtion, but
not
concurrently.
2. There capon enh a re
php ica l ly
mounted om
the
I M U
but
i l l v r t m t e d
a hown for
c l a r i t y .
MANUALiMODE S IGNAU
I
RUNNION
DRIVE
S C A N N I N G
TELESCOPE
AND SEXTANT
COUPLlNG
DISPUY
I
UNIT TRU NNIO N DRIVE SIGNALS
SHAFT
I
A
SHAFT CRIVE SIGNALC
I
OUPLING
SHAFT
DRIVE DlSPuy
SIGNAL UNlT
(*) AND
(-)
X
A V E L O C l l Y
1
DRNE I UPLINK DATA FROM MSFN
1 Y G T A L
- -
DRIVE SIGNAL
ATTITUDE
IMPULSE
CONTROL
THRUST C O W M S
TO REACTION
CONTROL SYSTEM
I
M O L L 0
GUIDANCE
COMPUTER
I
P
M
O
M
O
+
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
59/849
IMU INNER GIMBAL
c
ANALOG
CONVERTER
INNER GIMB4L
RESOLVER SIGNAL
I
GIMBAL INNER IMBAL DIFFERENCE
POSITION COUPLING SIGNAL
UNIT
'OMMANE
D I S P U Y
1
ANGLE SIGNALS
CRIVE SIGNAL"
FROM
MSFN
-
D l S P U Y A N D COMMANDS
EYBOARD
(2 LOCATIONS)
L * MO D E S I G N A U
-
ANGLE SIGNALS
I
DRIVE SIGNALS
($ A N D (-) Y
AVELOCITY
I
(*)
A N D (-)X
AVELOC ITY
I
M O L L 0
GUIDANCE
COMPUTER
' O S I T I O N C O M M A M S .
4
IMU/CDU
I I
1
1
TO NNER
SHAFT ANGLE
G I M M L
I J
C O A E E
ALIGN.
.
Y-IRI G TORQUE AM P
Y-IWG TORQUE
CALIBRATION GENERATOR
A U G N M OD E
-
N L Y )
M ID DL E G I W A L
RESOLVER SIGNAL
I
U/CD U
AU MIDDLE G IMBAL
' COMMANDS--
I I
i 1
I TO
MIDDLE
SHAFT
ANGLE
G l M M L C OA RS
Z-IRIG TORQUE
A L I G N N A P
Z-IRIG TORQUE
GENERATOR TO
OUTER
GIMBAL COARS
COMMANDS
(IS5 FINE
A L I G N M O DE
O N L Y )
-
MU OUTER GIMBAL
QSlTlON COMMANDS I
A U G N
AMP
OUTER G lM M L
RESOLVER SIGNAL
-I
Y A W ~ I T C H
RESOLVER
(GIMBAL
A X E S TO
N A V
BASE
A X E S )
3T FIXED
RESOLVER
( N A V
EASE AXES
TO S/C
AXES)
S/C BO
AN D O
ATTITUD
OFFSE
ATTITU
S/C
BO
ERROR
)
S/C W D
ATTITUD
(
M
DISPLAY SIGNAL
16X-OFFSET
ROLL ERROR S IG N
1 b SHAFT ANGLE J
D O W
N L IN K
TO
MSFN
+ ATA
TERNARY
SWITCH AN D X-IRIG TORQUE
X-IRIG
TORQUE
CALIBRATION GENERATOU
COMMANDS
(ISS FINE
A U G N M O D E O N L Y)
I
SPS E N G I N E ON/OFF COMMANDS
1
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
60/849
PITCH A
M)DY PITCH ATTITUDE I , ORREC
ERROR
SIGNAL
I
I
I
1
1
I
I
FUNCTIONS
OF
INNER
AND MICDLE GlMeALS)
I
I
YAW I
I
I
i
E R R C X SIGNAL
E C A
I A
I I
BODY YAW ATTITWE
I
I
IGNU
(FUNCTIONS
OF INNER,
MIDDLE, AN D OUTER
GIMALS)
BE
4
SIGNALS
fAW ATTITUDE
CORRECTION
SIGNALS
REACTION
C O M R O L
SYSTEM
t
STABLE
MEMBER
I l h l h I C D
r,....,,
S
O
GI
GIMWL
RESOLVER
ANGLE SIGNAL TO
FLIGHT DIRECTOR
All ITUDE INDICATOR
MIDDLE
G I h U A L q
SIGNALS
TCH GIMBAL
O M M A N C S
1
YAW GIM BAL SERVICE
PROPULSION
SYSTEM
OMMANDS
THRUST ON/OFF
I
AUXILIARY
C 0 M M A N s
I
I
ECA
-I
(+) AND (-) 2
(+)
AND
(-1
X
(+) A N D (-) Y
VELOCITY CHAIGE SIGNALS
VELOCITY CHANGE SIGNALS
VELOCITY CHANGE SIGNALS
*
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
61/849
SMZA -03-SCO 12
AP OL L O OPERATIONS HANDBOOK
YSTEMS DATA
I
TORQUE MOTOR
DRIVE SIGNAL
I
Figure2.
2 - 2 .
G & N Sys tem Functional Block Diagram
GUIDANCE AND NAVIGATION
SYSTEM
Basic Date'
.
l 2 1966 Change Date
page2 . 2 - 5 1 2 . 2
M is s ion
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
62/849
S M
2 A -0 3
- SC0 1
2
APOLLO OPERATIONS HANDBOOK
SYS TEM S D.4T-4
T h e o p t ic s p rov ide a c c u ra te s t a r a n d l a n d
ma rk a n g ula r me a s u re -
Sightings a r e acc ompli shed by the nav iga tor us ing the SXT
ande n t s .
SCT.
h an d c o n t ro l l e r o r ma n u al ly u s in g a u n iv e r
s a l to o l , a s d e s i re d .
a x e s a r e p a r a l l e l .
a s d e s i r e d .
ma te 60 -deg ree fie ld of view.
t o a c q u ir e a nd c e n t e r s t a r s o r l a n d m a r k
s p r i o r t o S X T u s e .
provi des 28-power mag nific ation with a
1.
8-d egr ee fie l d of view.
SXT has two lines of s ig ht, enabl ing i t to me as ur e the
included angle
be tween two ob jec ts . Th is re qu ire s two l ines of s igh t
which enab le the
two v iewe d o b je c t s to b e s u p e r imp o s e d . F o r a
s t a r - l a n d m a r k s i gh t i ng ,
the landm ark l ine o f s ight i s c en te red a long the
SXT
s h a f t a x i s .
imag e is moved toward the lan dma rk by ro ta t ing the shaf t
and t runnion
axes un t i l the two v iewed ob jec t s a re s uper im posed .
The shaf t and
trunnion ang les a r e repea te d by the op t ic CDUs. When the
nav iga tor i s
sa t i s f ie d wi th image pos i t ion s , he is su es a ma rk
com mand to the -4GC.
The -4GC reads the optics C D U a n g le s , I M U CDU angles ,
and t im e , and
compu tes the pos i t ion of the spa cecra f t .
o n s to re d s t a r a n d l a n d ma rk d a ta which ma y a l
s o b e u s e d by the .AGC to
re q u e s t s p e c i f i c s t a r s o r l a n d m a rk s fo r
n av iga t io n al s ig h t in g s . T wo o r
m o r e s i gh t i ng s ,
o n t wo o r m o r e d i f f er e n t s t a r s , m u s t b e t
a k en t o p e r f o r m
a comple te posi t ion de te rm ina t io n .
The op t ics a r e pos it ioned by dr ive mot ors comm anded by
the op t ics
The shaft
T ru n n io n a x e s ma y b e o p e ra te d in p a ra l l e l o
r o f f s e t ,
T h e S CT
is
a unity power ins t r ume nt prov iding an approx i-
I t i s u s e d to ma k e l a n d ma rk s ig h t ing s a nd
The SXT
The
T h e s t a r
The AGC bases the computation
2 . 2 . 2 . 1
Opera t iona l Modes .
T h e G&N s y s t e m i s o p e ra te d in s ix b a s ic o p
e ra t io n a l mo d e s .
Selec tion of any one mode i s acco mp lish ed manual y
b y
the f light c re w or
au tomat ica l ly
by
the ACC.
T h e b a s ic mo d e s a r e a s fo llows:
0
0 Zer o encode
0
Co a rs e a l ig n
0 F in e a l ig n
0
Attitude control
0 E n t r y
The s ys t em conf igura t i on nec ess a r y to opera te in
an)- of the modes i s
Xlonitor ( init i a ted by S C S mode se lec t ion)
es tab l i shed by re lay swi tch ing .
The moni to r mode i s used a t launch, a sce n t , and dur ing
orb i t un ti l
CSM / S- I VB s e p a ra t io n , to p ro v id e f lig h t pa th
d a ta fo r c re w d i s p la y s .
c o a r s e a l ig n , f in e a l ig n , a n d z e r o e nc o de
mo d e s a r e u s e d to
a l ign the
I X l U
af te r s tandby per io ds o r to acquir e a new s tab le p la t
fo rm
orien ta t ion . The a t t i tude con tro l mode prov i des fo r
spacec ra f t a t t i tude
contr o l and nav iga t ion computa t ions to me asu re pos it
ion and ve loc i ty .
e n t ry mo d e p ro v id e s c o n t r o l of th e s p a c e c
ra f t l i f t v e c to r d u r in g e n t ry
p h a s e .
The
The
C U
I
D
A N
CE 4 N D N AV I
G
=Z TION S YS T E
11
Miss ion Bas ic Da te l 2 Nov l966 Change Date Pag e
2 . 2 - 7
-
7/23/2019 Ap Operations Handbook CSM SC 012 1966.pdf
63/849
SMZA-03-SCO 2
APOLLO OPERATIONS HANDBOOK
SYSTEMS DATA
The ISS and CSS wi l l be op e ra t ed i n on -s t andby cyc l e
s t o conse rve
The OSS is sh ut off
e l e c t r i c a l p o w e r.
a tu r e , and t he CSS main ta ins AGC t iming func t ions
.
when not in use .
subsys t ems , s t andby
i s
no t cons ide r ed a s ba s i c mode .
Dur ing s tandby opera t ion , the
ISS
main t a in s IMU t empe r
-
Since s t andby ope ra t i on t ime va r i e s f o r e a ch of t
he
2 . 2 . 2 .
1. 1 Moni tor Mode ,
Dur ing p r e l aunch ope ra t i ons , t he
G & N
s y s t e m
i s
a l i gned t o t he de s i r e d
l aunch r e f e r en ce a t t i t ude and gy ro com pas se s t o
m: in ta in th i s a t t i tude .
Approx ima te ly 3 m i n u t e s p r i o r t o l aunch , t he gy
r o compass ing i s s t opped
a n d th e s y s t e m b e c o m e s i n e r t ia l l y r e f e
r e n c e d .
mon i tor in g the f l igh t pa th angles by dr iv in g the Ine
r t ia l Coupl ing Disp lay
Uni t s ( ICDUs) through p rog ra mm ed a t t i tude changes
.
com pare d wi th t he
IMU
g imba l ang l e s t o p roduce f l ight pa th e r r o r s i gna
l s
wh ich a r e d i sp l ayed by t he FDAI e r r o r need l e s
.
w i th r e spe c t t o t he
IMU
or i en t a t i on , i s disp layed by the FDAI ba l l .
(P r e l au nch FDAI r ead ings
a r e
164. 76-degree ro l l , 58 .3 0-deg ree p i tch , and
9. 69-d egree yaw, wi th res pe c t to the navigat ion ax i s
symb ol ,
o r b i t i n s e r t i o n i s 0-deg ree ro l l , 310. 5-deg
ree p i tch , and 0-deg ree yaw,
a s sum ing a 180 -deg ree ro l l ha s been pe r fo rm ed and
launch pad 3 7
i s
u s e d .
)
Dur ing boos t p r i o r t o l aunch e scape t ower (L ET ) e t
t i son , t he AGC d i sp lays
the fol lowing:
Upon lift-off the ACC beg ins
The ICDU angles a re
To ta l spac ec ra f t a t t i t ude ,
Display
a t
REGISTER 1
-
Ine r t ia l fl igh t pa th angle ; iner t ia l ve loc ity wi th
re spe c t
t o l o c a l h o r i z on t a l i n d e g r e e s .
REGISTER
2 -
Iner t i a l ve loc ity in f t per
s e c .
REGISTER 3
-
Alti tude above launch pad in naut ica l mi l es ( N M s )
Upon rece ip t of LE T j e t t i son s i gna l s t he d i sp l
ays change t o the fol lowing:
REGISTER 1 - P r e d i c t e d G s f o r f r e e - f a l l a n d
e n t r y a t 6 0 - d e g r e e
bank angle .
REGISTER
2 -
Alti tude of per ige e above the mean equ ator ia l rad ius
in
NMs.
REGISTER 3 - Time of f ree- fa l l to 300, 000 i t above mean
equa to r i a l
r ad iu s i n minu t e s and s econds .
This d i sp laye d da ta provid es the f l igh t c rew wi th suf
f ic ien t in format ion to
make ab o r t o r con ti nue dec i s i ons ; howeve r ,
i f
t ime
i s
not c r i t i ca l , the
dec is ion