Embed Size (px)
Citation preview
© ABB Group June 20, 2012 | Slide 1
Animp Ati
Advanced control and optimization of a Complex Combined Cycle Plant
© ABB Group June 20, 2012 | Slide 2
Presentation Agenda
� Advanced Process Control: brief introduction
� Advanced Process Control at an IGCC unit
� Brief process introduction
� Implementation Results
� Syngas balancing
� MW output control
� Gasifiers conversion control

© ABB Group June 20, 2012 | Slide 3
APC Technology: brief introduction
© ABB Group June 20, 2012 | Slide 4
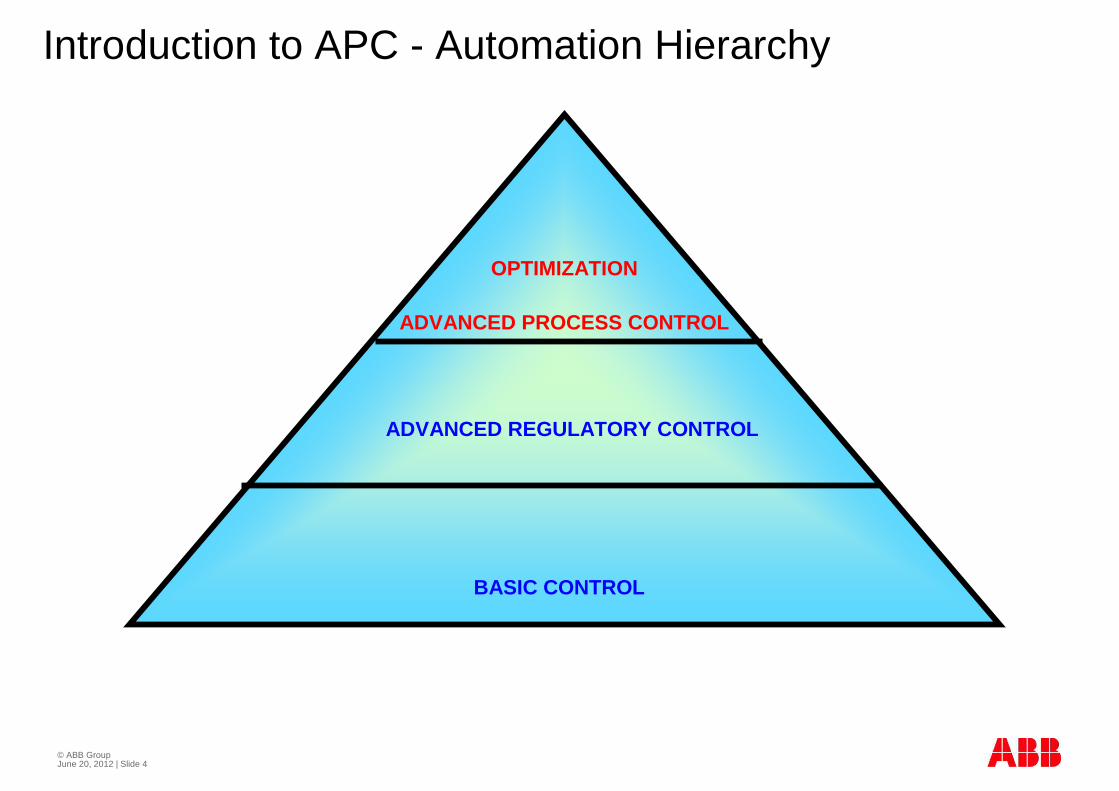
Introduction to APC - Automation Hierarchy
OPTIMIZATION
ADVANCED PROCESS CONTROL
ADVANCED REGULATORY CONTROL
BASIC CONTROL
© ABB Group June 20, 2012 | Slide 5
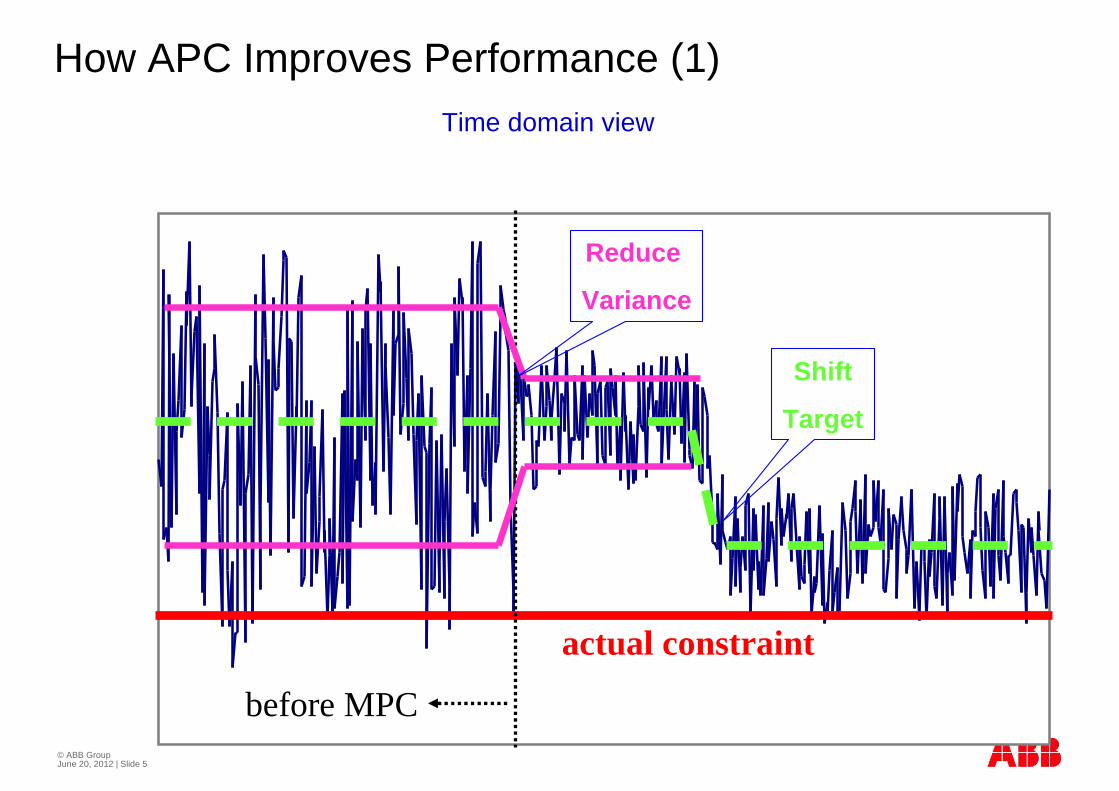
How APC Improves Performance (1)Time domain view
actual constraint
before MPC
Reduce
Variance
Shift
Target

© ABB Group June 20, 2012 | Slide 6
How to improve control performance
� Use process models � Coordinated unit control instead of local control� Continuous control execution vs. human direction of local
setpoints� Multiple objectives, priority hierarchy
© ABB Group June 20, 2012 | Slide 7
Introduction to APC Technology
� Use of ABB Multivariable Controller OptimizeIT Predict & Control
� Predict & Control is an Observer Based Model Predictive Controller
� It uses State-Space technology to describe models and control process
� Any model is defined by a discrete time state-space process model description:
� x(k)=Ax(k-1)+B uu(k-1)+B dd(k-1)+w(k-1)
� y(k)=Cx(k) + h(k)
A, B, C=dynamics, x=state vector, u=controller outp ut, d=feedforward, w=process noise, y=measured process variable, h=measurement noise
© ABB Group June 20, 2012 | Slide 8
Introduction to MPC – The Models (2)
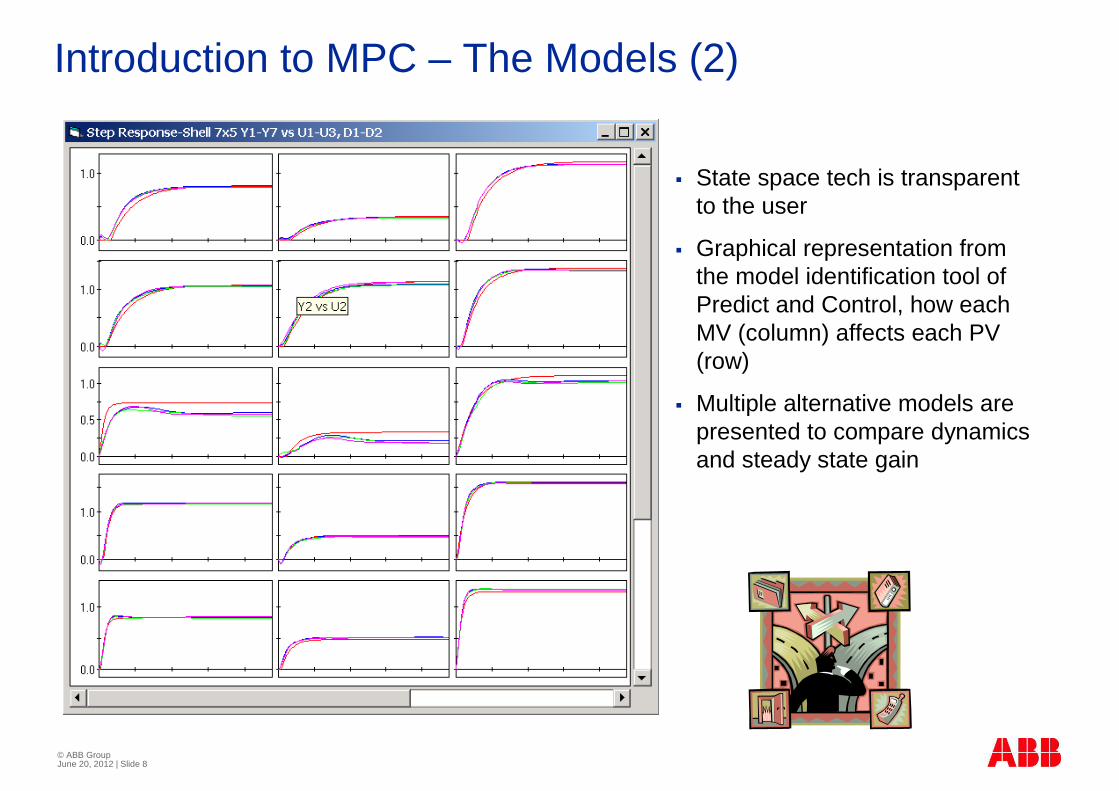
� State space tech is transparent to the user
� Graphical representation from the model identification tool of Predict and Control, how each MV (column) affects each PV (row)
� Multiple alternative models are presented to compare dynamics and steady state gain

Classical vs. Modern Formulation of MPCClassical formulation
�Simple Model identification
�Model with many parameters
�Need workaround to handle integrals (e.g. level control)
�Only Exit disturbance
Modern Formulation
�Well known theory (Kalman Filter)
�Simple model representation
�Easy model for integral process (level control)
�Input and output disturbance
© ABB Group June 20, 2012 | Slide 9
�Source: http://en.wikipedia.org/wiki/Model_predictive_control
http://www.abb.com/industries/seitp410/f908918ee650587cc1257027006c2dc4.aspx?productLanguage=us&country=US
http://www.aspentech.com/publication_files/he_jan2006_state_space_controller.pdf

© ABB Group June 20, 2012 | Slide 10
Implementation Results
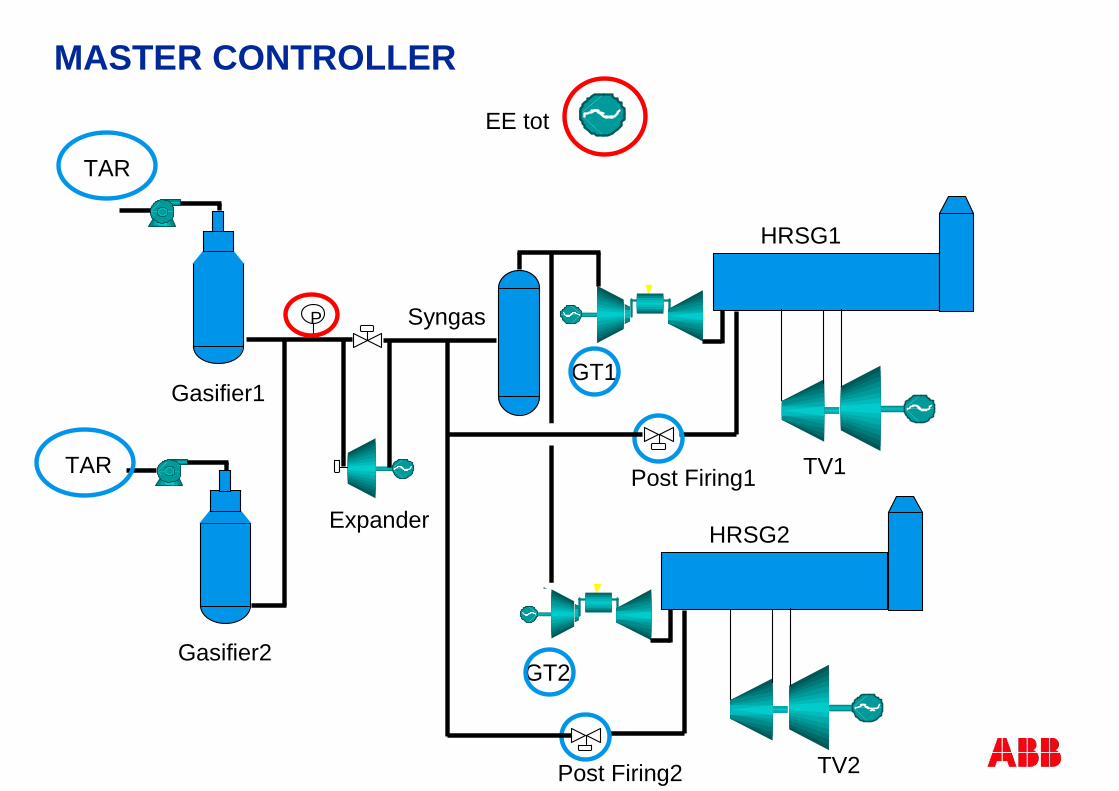
TAR
EE tot
Syngas
Post Firing1
P
GT1
TV1
Expander
Gasifier1
HRSG1
MASTER CONTROLLER
TV2
HRSG2
GT2
Post Firing2
Gasifier2
TAR
�Honor Process constraints (e.g. max temp SH, feed pump amperes, etc.)
�Keep CH4 content in gasifiers outlet at a setpoint
�Keep Syngas pressure in range at Syngas HP header
�Keep Total MW at a setpoint or, if not possible, maximize MW
�Maximize GT contribution vs. Postfiring
�Keep power integral over 15 mins horizon
�Avoid GT saturation issues – sudden drop of temperature
MASTER CONTROLLER OBJECTIVES
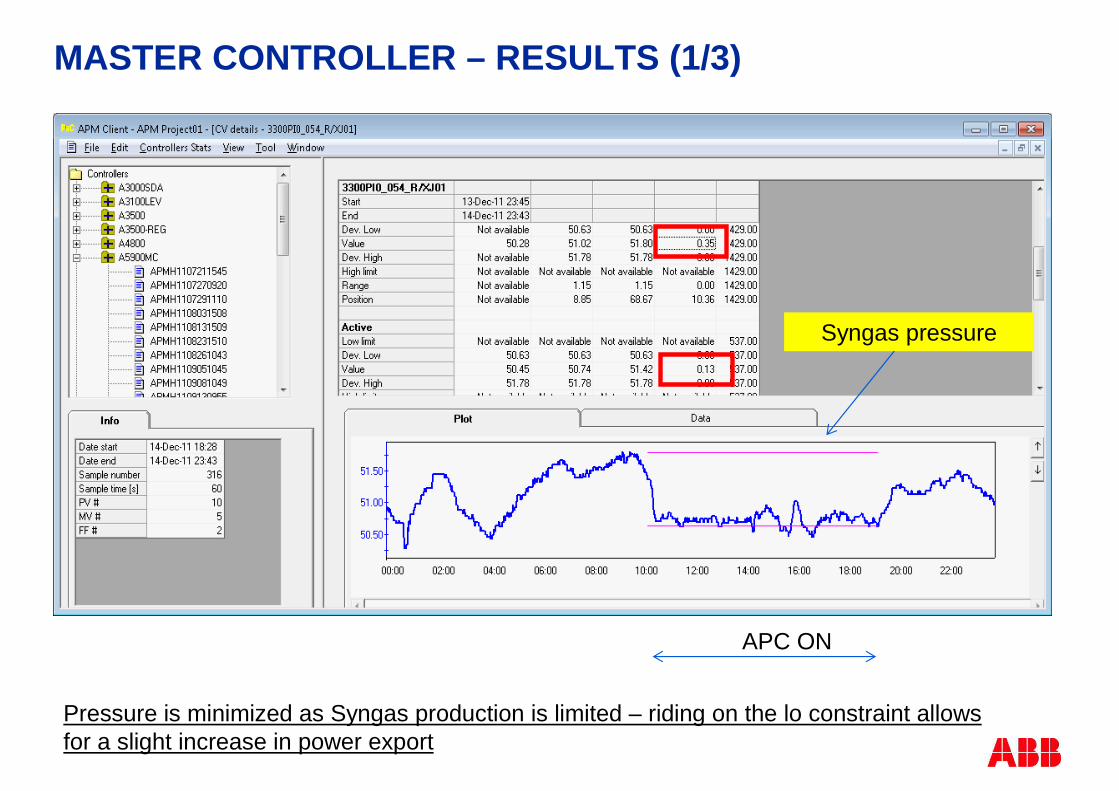
Syngas pressure
Pressure is minimized as Syngas production is limited – riding on the lo constraint allows for a slight increase in power export
MASTER CONTROLLER – RESULTS (1/3)
APC ON
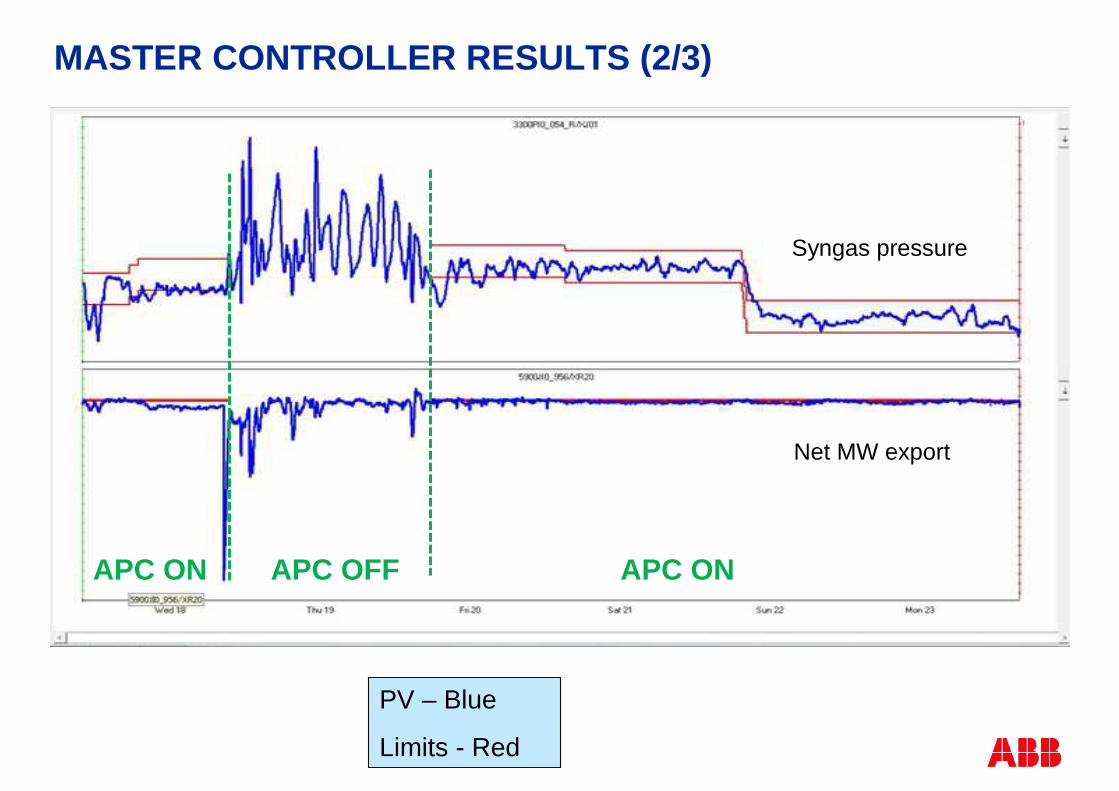
MASTER CONTROLLER RESULTS (2/3)
Net MW export
Syngas pressure
APC ONAPC OFFAPC ON
PV – Blue
Limits - Red
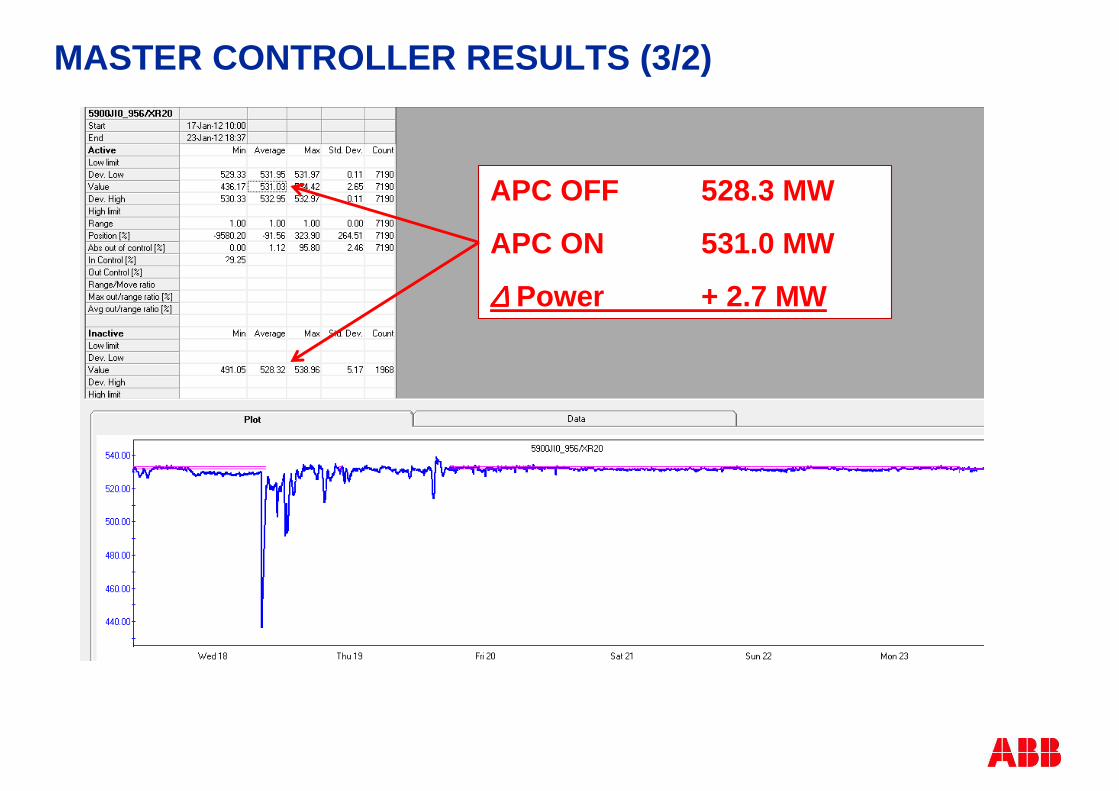
MASTER CONTROLLER RESULTS (3/2)
APC OFF 528.3 MW
APC ON 531.0 MW
∆∆∆∆ Power + 2.7 MW
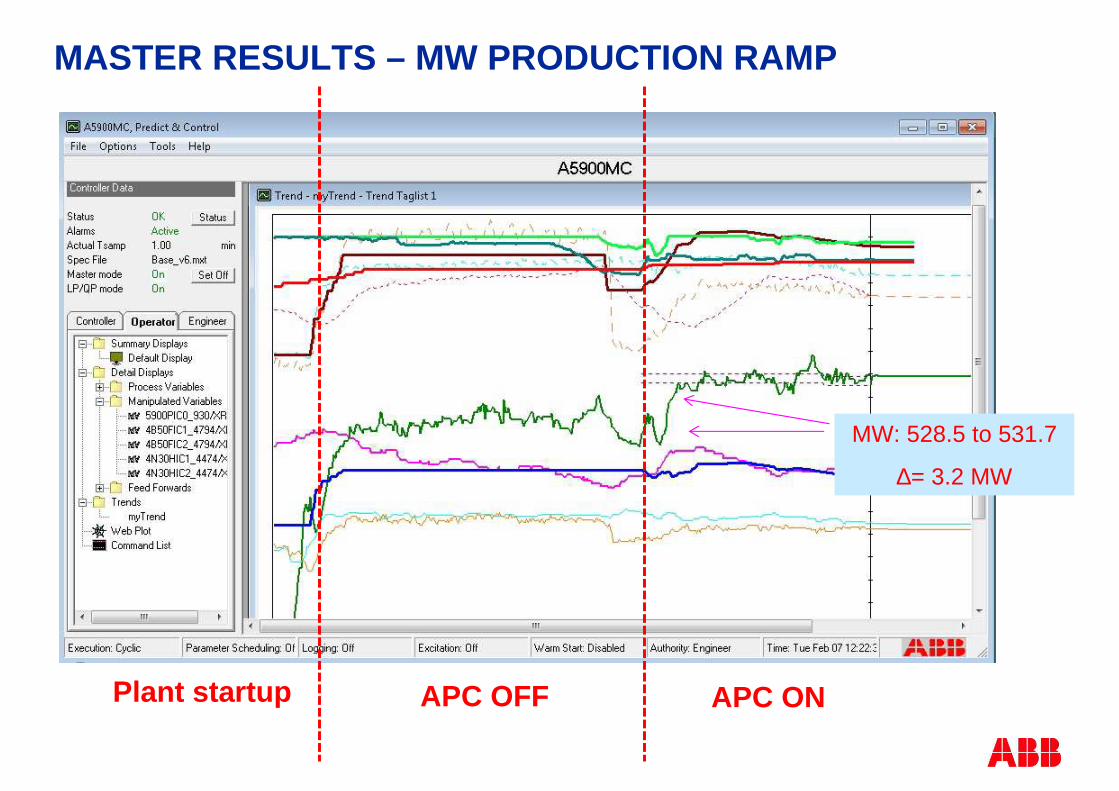
MASTER RESULTS – MW PRODUCTION RAMP
MW: 528.5 to 531.7
∆= 3.2 MW
APC ONAPC OFFPlant startup

MASTER CONTROLLER DISPLAYS (1/2)
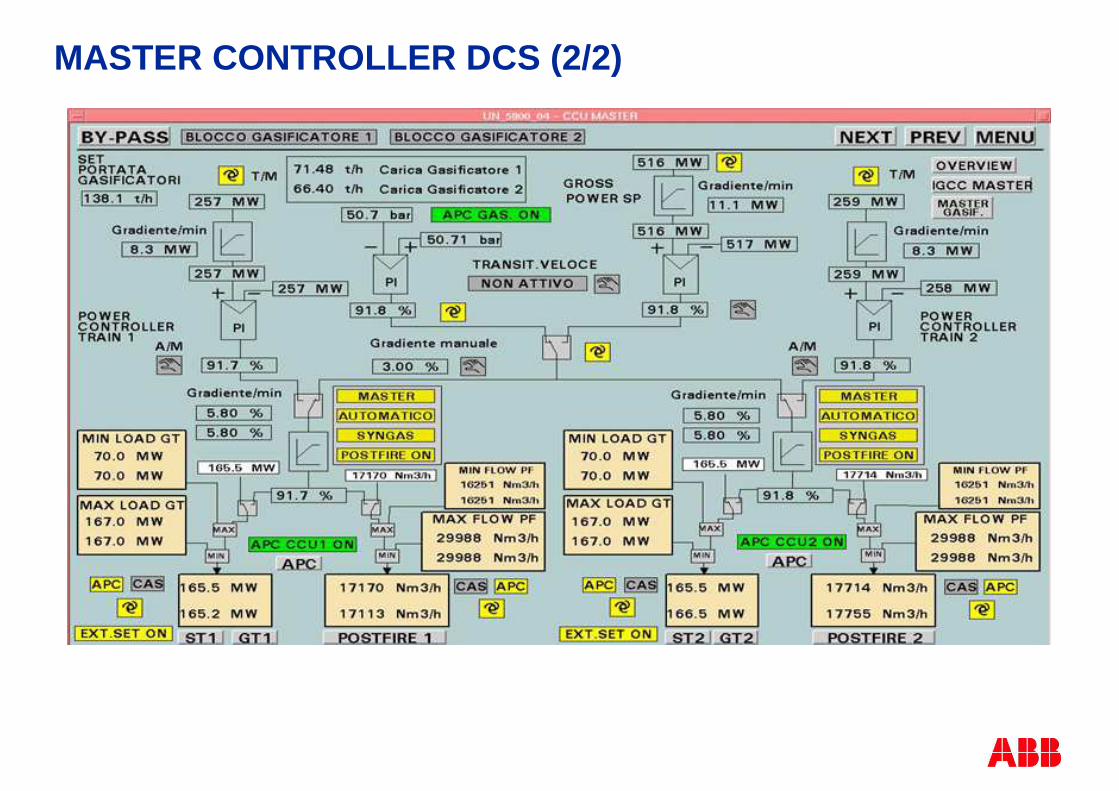
MASTER CONTROLLER DCS (2/2)
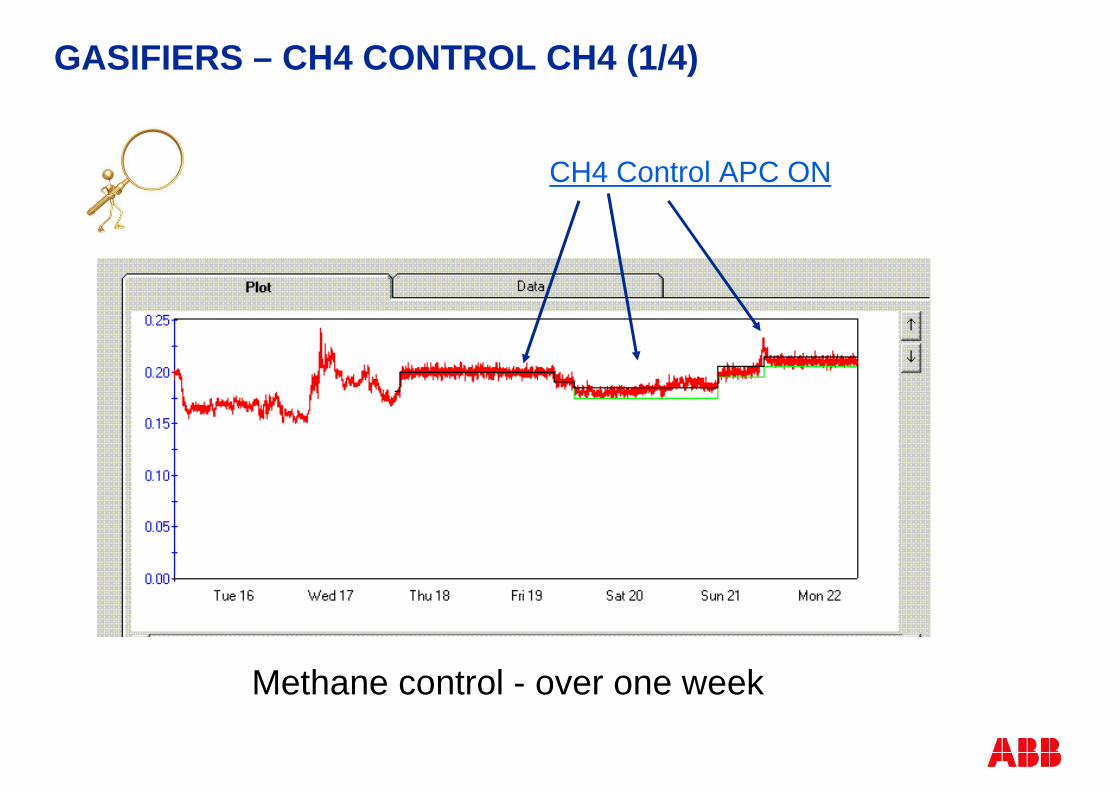
Methane control - over one week
CH4 Control APC ON
GASIFIERS – CH4 CONTROL CH4 (1/4)
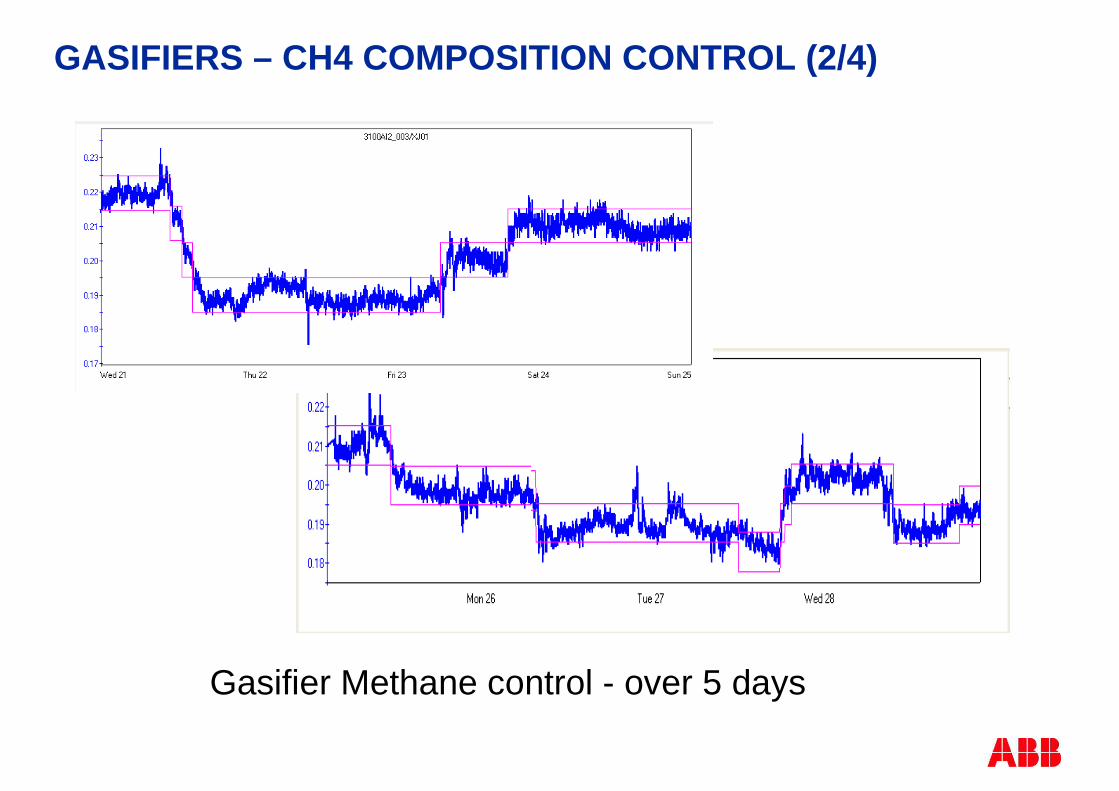
GASIFIERS – CH4 COMPOSITION CONTROL (2/4)
Gasifier Methane control - over 5 days

© ABB Group June 20, 2012 | Slide 21
Integration with DCS
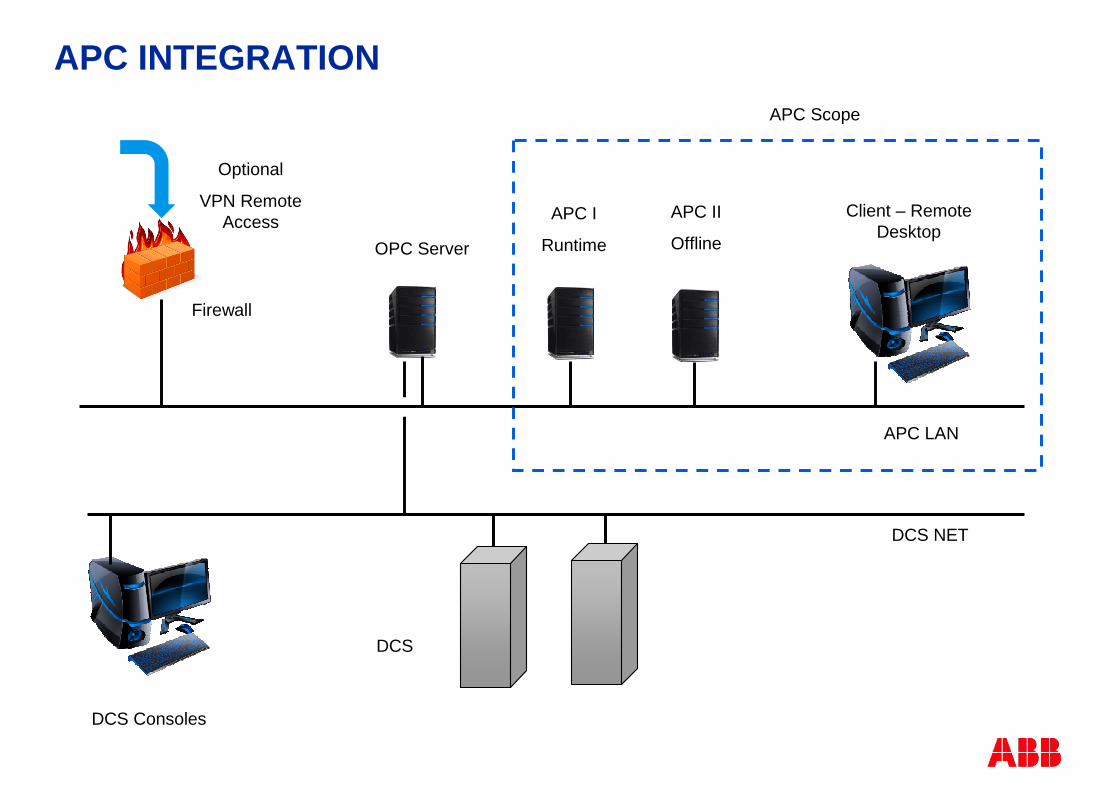
OPC Server
Firewall
APC I
Runtime
Client – Remote Desktop
DCS
DCS NET
APC LAN
Optional
VPN Remote Access
APC INTEGRATION
DCS Consoles
APC II
Offline
APC Scope

© ABB Group June 20, 2012 | Slide 23





























