Embed Size (px)
Citation preview

Computer Graphics Forum Volume 18, (1999) Number 1 pp. 17–26
Animating Sand, Mud, and Snow
Robert W. Sumner James F. O’Brien Jessica K. Hodgins
College of Computing and Graphics, Visualization, and Usability CenterGeorgia Institute of Technology
AbstractComputer animations often lack the subtle environmental changes that should occur due to the actionsof the characters. Squealing car tires usually leave no skid marks, airplanes rarely leave jet trailsin the sky, and most runners leave no footprints. In this paper, we describe a simulation model ofground surfaces that can be deformed by the impact of rigid body models of animated characters. Todemonstrate the algorithms, we show footprints made by a runner in sand, mud, and snow as wellas bicycle tire tracks, a bicycle crash, and a falling runner. The shapes of the footprints in the threesurfaces are quite di!erent, but the e!ects were controlled through only five essentially independentparameters. To assess the realism of the resulting motion, we compare the simulated footprints tohuman footprints in sand.
Keywords: animation, physical simulation, ground interaction, terrain, sand, mud, snow.
1. Introduction
To become a communication medium on a par withmovies, computer animations must present a rich viewinto an artificial world. Texture maps applied to three-dimensional models of scenery help to create some ofthe required visual complexity. But static scenery isonly part of the answer; subtle motion of many ele-ments of the scene is also required. Trees and bushesshould move in response to the wind created by a pass-ing car, a runner should crush the grass underfoot,and clouds should drift across the sky. While simplescenery and sparse motion can sometimes be used ef-fectively to focus the attention of the viewer, miss-ing or inconsistent action may also distract the viewerfrom the plot or intended message of the animation.One of the principles of animation is that the viewershould never be unintentionally surprised by the mo-tion or lack of it in a scene1.
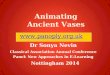
Subtle changes in the scenery may also convey im-portant information about the plot or scene contextto the viewer. For example, figure 1 shows an imageof alien bikers riding across a desert landscape. Thepresence of tracks makes it clear that the ground issoft sand rather than hard rock, and that other bikershave already passed through the area. Figure 2 shows
Figure 1: Image of tracks left in the sand by a groupof fast moving, alien bikers.
the same scene without the sand. In addition to beingvisually less interesting, the altered image lacks someof the visual cues that help the viewer understand thescene.
Movie directors face a related problem because theymust ensure that the viewer is presented with a consis-
c! The Eurographics Association 1999. Published by BlackwellPublishers, 108 Cowley Road, Oxford OX4 1JF, UK and 238 Main
Street, Cambridge, MA 02142, USA.

2 R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow
Figure 2: Same image as shown in figure 1 but with-out the simulated tracks in the sand.
tent view of the world and the characters. An actor’sclothing should not inexplicably change from scene toscene, lighting should be consistent across edits, andsuch absent, unexpected, or anachronistic elements asmissing tire tracks, extra footprints, or jet trails mustbe avoided. The risk of distracting the viewer is sogreat that one member of the director’s team, knownas a “continuity girl,” “floor secretary,” or “second as-sistant director,” is responsible solely for maintainingconsistency2.
Maintaining consistency is both easier and harderin computer animation. Because we are creating anartificial world, we can control the lighting conditions,layout, and other scene parameters and recreate themif we need to “shoot” a fill-in scene later. Because theworld is artificial, however, we may be tempted to re-arrange objects between scenes for best e!ect, therebycreating a series of scenes that could not coexist ina consistent world. Computer-generated animationsand special e!ects add another facet to the consis-tency problem because making models that move anddeform appropriately is a lot of work. For example,most animated figures do not leave tracks in the en-vironment as a human actor would and special e!ectsartists have had to work hard to create such subtlebut essential e!ects as environment maps of flicker-ing flames. Because each detail of the scene representsadditional work, computer graphics environments areoften conspicuously clean and sparse. The approachpresented here is a partial solution to this problem;we create a more interesting environment by allowingthe character’s actions to change a part of the envi-ronment.
In this paper, we describe a model of ground sur-faces and explain how these surfaces can be de-formed by characters in an animation. The ground
material is modeled as a height field formed by verticalcolumns. After the impact of a rigid body model, theground material is deformed by allowing compressionof the material and movement of material between thecolumns. To demonstrate the algorithms, we show thecreation of footprints in sand, mud, and snow. Thesesurfaces are created by modifying only five essentiallyindependent parameters of the simulation. We eval-uate the results of the animation through compari-son with video footage of human runners and throughmore dramatic patterns created by bicycle tire tracks(figure 1), a falling bicycle (figure 7), and a trippingrunner (figure 10).
2. Background
Several researchers have investigated the use of pro-cedural techniques for generating and animating back-ground elements in computer-generated scenes. Al-though we are primarily interested in techniques thatallow the state of the environment to be altered in re-sponse to the motions of an actor, methods for animat-ing or modeling a part of the environment independentof the movements of the actors are also relevant be-cause they can be modified to simulate interactions.
The first example of animated ground tracks forcomputer animation was work done by Lundin3, 4. Hedescribes how footprints can be created e"ciently byrendering the underside of an object to create a bumpmap and then applying the bump map to the groundsurface to create impressions where the objects havecontacted the ground.
The work most closely related to ours is that of Liand Moshell5. They developed a model of soil that al-lows interactions between the soil and the blades ofdigging machinery. Soil spread over a terrain is mod-eled using a height field, and soil that is pushed in frontof a bulldozer’s blade is modeled as discrete chunks.Although they discount several factors that contributeto soil behavior in favor of a more tractable model,their technique is physically based and they arrive attheir simulation formulation after a detailed analysisof soil dynamics. As the authors note, actual soil dy-namics is complex and their model, therefore, focuseson a specific set of actions that can be performed onthe soil, namely the e!ect of horizontal forces actingon the soil causing displacements and soil slippage.The method we present here has obvious similaritiesto that of Li and Moshell, but we focus on modelinga di!erent set of phenomena at di!erent scales. Wealso adopt a more appearance-based approach in theinterest of developing a technique that can be used tomodel a wide variety of ground materials for anima-tion purposes.
Another method for modeling the appearance of
c! The Eurographics Association 1999

R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow 3
ground surfaces is described by Chanclou, Luciani,and Habibi6. They use a simulation-based groundsurface model that behaves essentially like an elas-tic sheet. The sheet deforms plasticly when acted onby other objects. While their model allows objects tomake smooth impressions in the ground surface, theydo not describe how their technique could be used torealistically model real world ground materials.
Nishita and his colleagues explored modeling andrendering of snow using metaballs7. Their approachallowed them to model snow on top of objects anddrifts to the side of objects. They also developed amethod for realistically rendering snow that capturede!ects due to multiple levels of light scattering.
Other environmental e!ects that have been ani-mated include water, clouds and gases8, 9, 10, fire9, 11,lightning12, and leaves blowing in the wind13. Amongthese, water has received the most attention. Earlywork by Peachey14 and by Fournier and Reeves15 usedprocedural models based on specially designed wavefunctions to model ocean waves as they travel andbreak on a beach. Later work by Kass and Miller16
developed a more general approach using shallow wa-ter equations to model the behavior of water undera wider variety of conditions. Their model also modi-fied the appearance of a sand texture as it became wet.O’Brien and Hodgins17 extended the work of Kass andMiller to allow the behavior of the water simulationto be a!ected by the motion of other objects in theenvironment and to allow the water to a!ect the mo-tion of the other objects. They included examples ofobjects floating on the surface and simulated humansdiving into pools of water. More recently Foster andMetaxas18 used a variation of the three-dimensionalNavier-Stokes equations to model fluids. In additionto these surface and volumetric approaches, particle-based methods have been used to model water sprayand other loosely packed materials. Supplementingparticle models with inter-particle dynamics allows awider range of phenomena to be modeled. Examplesof these systems include Reeves19, Sims20, Miller andPearce21, and Terzopoulos, Platt, and Fleischer22.
Simulation of interactions with the environmentcan also be used to generate still models. Severalresearchers have described techniques for generatingcomplex plant models from grammars describing howthe plant should develop or grow over time. Mech andPrusinkiewicz23 developed techniques for allowing de-veloping plants to a!ect and be a!ected by their en-vironment. Dorsey and her colleagues24, 25 used simu-lation to model how an object’s surface changes overtime as environmental factors act on it.
Figure 3: The uniform grid forms a height field thatdefines the ground surface. Each grid point within theheight field represents a vertical column of ground ma-terial with the top of the column centered at the gridpoint.
3. Simulation of Sand, Mud, and Snow
In this paper, we present a general model of a de-formable ground material. The model consists of aheight field defined by vertical columns of material.Using displacement and compression algorithms, weanimate the deformations that are created when rigidgeometric objects impact the ground material and cre-ate footprints, tire tracks, or other patterns on theground. The properties of the model can be variedto produce the behavior of di!erent ground materialssuch as sand, mud, and snow.
3.1. Model of Ground Material
Our simulation model discritizes a continuous vol-ume of ground material by dividing the surface ofthe volume into a uniform rectilinear grid that de-fines a height field (figure 3). The resolution of thegrid must be chosen appropriately for the size of thedesired features in the ground surface. For example, infigure 1 the resolution of the grid is 1 cm and the bi-cycles are approximately 2meters long with tires 8 cmwide. Though the resolution of the grid determines thesize of the smallest feature that can be represented, itdoes not otherwise dramatically a!ect the shape of theresulting terrain (figure 4).
Initial conditions for the height of each grid pointcan be created procedurally or imported from a va-riety of sources. We implemented initial conditionswith noise generated on an integer lattice and inter-polated with cubic Catmull-Rom splines (a variationof a two-dimensional Perlin noise function describedby Ebert8). Terrain data or the output from a model-ing program could also be used for the initial height
c! The Eurographics Association 1999

4 R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow
A B C D
Figure 4: Footprint in sand computed with di!erent grid resolutions. (A) 20mm, (B) 10mm, (C) 5mm, and(D) 2.5mm. As the grid resolution increases, the shape of the footprint is defined more clearly but its overall shaperemains the same.
field. Alternatively, the initial conditions could be theoutput of a previous simulation run. For example, thetrampled surface of a public beach at the end of a busysummer day could be modeled by simulating manycrisscrossing paths of footprints.
3.2. Motion of the Ground Material
The height field represented by the top of the columnsis deformed as rigid geometric objects push into thegrid. For the examples given in this paper, the ge-ometric objects are a runner’s shoe, a bicycle tireand frame, and a jointed human figure. The motionof the rigid bodies was computed using a dynamicsimulation of a human running, bicycling, or fallingdown on a smooth, hard ground plane26. The result-ing motion was given as input to the simulation of theground material in the form of trajectories of positionsand orientations of the geometric objects. Because ofthis generic specification of the motion, the input mo-tion need not be dynamically simulated but could bekeyframe or motion capture data.
The surface simulation approximates the motion ofthe columns of ground material by compressing or dis-placing the material under the rigid geometric objects.At each time step, a test is performed to determinewhether any of the rigid objects have intersected theheight field. The height of the a!ected columns is re-duced until they no longer penetrate the surface of therigid object. The material that was displaced is eithercompressed or forced outward to surrounding columns.A series of erosion steps are then performed to re-duce the magnitude of the slopes between neighbor-ing columns. Finally, particles can be generated fromthe contacting surface of the rigid object to mimic thespray of material that is often seen following an im-pact. These stages are illustrated in figure 5. We nowdiscuss each stage of the algorithm in more detail: col-lision, displacement, erosion, and particle generation.
Collision. The collision detection and response algo-rithm determines whether a rigid object has collided
with the ground surface. For each column, a ray is castfrom the bottom of the column through the vertex atthe top. If the ray intersects a rigid object before ithits the vertex, then the rigid object has penetratedthe surface and the top of the column is moved downto the intersection point. A flag is set to indicate thatthe column was moved, and the change in height isrecorded. The computational costs of the ray inter-section tests are reduced by partitioning the polygonsof the rigid body models using an axis-aligned bound-ing box hierarchy27.
Using a vertex coloring algorithm, the simulationcomputes a contour map based on the distance fromeach column that has collided with the object to theclosest column that has not collided (figure 6). Thisinformation is used when the material displaced bythe collision is distributed. As an initialization step,columns not in contact with the object are assignedthe value zero. During subsequent iterations, unla-beled columns adjacent to labeled columns are as-signed a value equal to the value of the lowest num-bered adjacent column plus one.
Displacement. Ground material from the columnsthat are in contact with the object is either com-pressed or distributed to surrounding columns thatare not in contact with the object. The compressionratio ! is chosen by the user and is one of the param-eters available for controlling the visual appearance ofthe ground material. The material to be distributed,#h, is computed by #h = !m, where m is the totalamount of displaced material. The material that is notcompressed is equally distributed among the neighborswith lower contour values, so that the ground mate-rial is redistributed to the closest ring of columns notin contact with the rigid object. The heights of thecolumns in this ring are increased to reflect the newlydeposited material.
Erosion. Because the displacement algorithm de-posits material only in the first ring of columns not incontact with the object, the heights of these columns
c! The Eurographics Association 1999

R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow 5
A B C D
Figure 5: The motion of the ground material is computed in stages. (A) First, the geometric objects are intersectedwith the ground surface. (B) Next, the penetrating columns are adjusted, and (C) the material is distributed tonon-penetrating columns. (D) Finally, the erosion process spreads the material.
000000
000
000
0
000
00
00000 0
0 0 0 00 0
0 000 0 0
0 0 0 00 0
0 00 0
00001
001 1 1
111
11
11111
11
111
111
11 1
11
11
0 1 1 2 2 222
2222
222
22
2222
2 22
22
22 2 3 3
3333
33
3 3
33
4
0
Figure 6: The contour map represents the distancefrom each column in contact with the foot to a columnthat is not in contact. For this illustration, we usedcolumns that are four-way connected. However, in theexamples in this paper we used eight-way connectivitybecause we found that the higher connectivity yieldedsmoother results.
may be increased in an unrealistic fashion. An “ero-sion” algorithm is used to identify columns that formsteep slopes with their neighbors and move materialdown the slope to form a more realistic mound. Sev-eral parameters allow the user to control the shape ofthe mound and model di!erent ground materials.
The erosion algorithm examines the slope betweeneach pair of adjacent columns in the grid. For a columnij and a neighboring column kl, the slope, s, is
s = tan"1(hij ! hkl)/d (1)
where hij is the height of column ij and d is the dis-tance between the two columns. If the slope betweentwo neighboring columns is greater than a threshold"out, then ground material is moved from the higher
column down the slope to the lower column. In thespecial case where one of the columns is in contactwith the geometric object, a di!erent threshold, "in,is used to provide independent control of the innerslope. Ground material is moved by computing the av-erage di!erence in height, #ha, for the n neighboringcolumns with too large a downhill slope:
#ha =
!(hij ! hkl)
n. (2)
The average di!erence in height is multiplied by afractional constant, #, and the resulting quantity isequally distributed among the downhill neighbors.This step in the algorithm repeats until all slopes arebelow a threshold, "stop. The erosion algorithm maycause some columns to intersect a rigid object but thispenetration will be corrected on the next time step.
Particle Generation. We use a particle system tomodel portions of the ground material that are throwninto the air by the motion of the rigid geometric ob-jects. The user controls the adhesiveness between theobject and the material as well as the rate at whichthe particles fall from the object. Each triangle of theobject that is in contact with the ground picks up avolume of the ground material during contact. Thevolume of material is determined by the area of thetriangle multiplied by an adhesion constant for thematerial. When the triangle is no longer in contactwith the ground, it drops the attached material asparticles according to an exponential decay rate.
#v = v(e("t+tc+!t)/h ! e("t+tc)/h) (3)
where v is the initial volume attached to the triangle, tis the current time, tc is the time at which the triangleleft the ground, #t is the time step size, and h is a halflife parameter that controls how quickly the materialfalls o!. The number of particles released on a giventime step is determined by n = #v/$, where $ is thevolume of each particle.
c! The Eurographics Association 1999

6 R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow
Figure 7: The left figure shows the ground area that has been created in the hash table. The currently active areais highlighted in red. The right figure shows the same scene rendered over the initial ground surface. There areapproximately 37,000 columns in the active area and 90,000 stored in the hash table; the number of columns inthe entire virtual grid is greater than 2 million.
The initial position, p0, for a particle is randomlydistributed over the surface of the triangle accordingto:
p0 = baxa + bbxb + bcxc (4)
where xa, xb, and xc are the coordinates of the verticesof the triangle and ba, bb, and bc are the barycentriccoordinates of p0 given by
ba = 1.0 !"%a (5)
bb = %b(1.0 ! ba) (6)
bc = 1.0 ! (ba + bb) (7)
where %a and %b are independent random variablesevenly distributed between [0..1]. This computationresults in a uniform distribution over the triangle28 .
The initial velocity of a particle is computed fromthe velocity of the rigid object:
p0 = + # p0 (8)
where and are the linear and angular velocityof the object. To give a more realistic and appealinglook to the particle motion, the initial velocities arerandomly perturbed.
The final component of the particle creation algo-rithm accounts for the greater probability that mate-rial will fall o! rapidly accelerating objects. A particleis only created if (|p0|/s)! > %, where s is the min-imal acceleration at which all potential particles willbe dropped, & controls the variation of the probabil-ity of particle creation with speed, and % is a randomvariable evenly distributed in the range [0..1].
If particles are only generated at the beginning ofa time step then the resulting particle distribution
will have a discrete, sheetlike appearance. We avoidthis undesirable e!ect by randomly distributing eachparticle’s creation time within the time step interval.The information used to calculate the initial positionand velocity is interpolated within the interval to ob-tain information appropriate for the particle’s creationtime.
Once generated, the particles fall under the influ-ence of gravity. When a particle hits the surface of acolumn, its volume is added to the column.
3.3. Implementation and Optimization
Simulations of terrain generally span a large area. Forexample, we would like to be able to simulate a run-ner jogging on a beach, a skier gliding down a snow-covered slope, and a stampede of animals crossing asandy valley. A naive implementation of the entire ter-rain would be intractable because of the memory andcomputation requirements. The next two sections de-scribe optimizations that allow us to achieve reason-able performance by storing and simulating only theactive portions of the surface and by parallelizing thecomputation.
Algorithm Complexity. Because the ground modelis a two-dimensional rectilinear grid, the moststraightforward implementation is a two-dimensionalarray of nodes containing the height and other infor-mation about the column. If an animation requireda grid of i rows and j columns, i # j nodes wouldbe needed, and computation time and memory wouldgrow linearly with the number of grid points. Thus,a patch of ground 10 m # 10 m with a grid resolu-tion of 1 cm yields a 1000#1000 grid with one million
c! The Eurographics Association 1999

R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow 7
2 4 6 8 10 12 14 16Number of Bikes
0
500
1000
1500
2000
2500
Seco
nds
SerialParallel
Figure 8: These timing results were computed ona Silicon Graphics Power Challenge system with 16195MHz MIPS R10000 processors and 4Gbytes ofmemory. Each character is an alien biker like the onesshown in figure 1. Times plotted are for one second ofsimulated motion.
nodes. If each node requires 10 bytes of memory, theentire grid requires 10 Mbytes of storage. Even thisrelatively small patch of ground requires significantsystem resources. However, most of the ground nodesare static throughout the simulation, allowing us touse a much more e"cient algorithm that creates andsimulates only the active nodes.
The active area of the ground surface is determinedby projecting an enlarged bounding box for the rigidobjects onto the surface as shown in figure 7. Thenodes within the projection are marked as active, andthe collision detection, displacement, and erosion al-gorithms are applied, not to the entire grid, but onlyto these active grid points. Additionally, nodes are notallocated for the entire ground surface, rather they arecreated on demand as they become active. The ij po-sition of a particular node is used as the index into ahash table allowing the algorithms to be implementedas if a simple array of nodes were being used.
Because only the active grid points are processed,the computation time is now a function of the size ofthe rigid objects in the scene rather than the totalgrid size. Memory requirements are also significantlyreduced, although the state of all modified nodes mustbe stored even after they are no longer active.
Parallel Implementation. Despite the optimiza-tion provided by simulating only active nodes, thecomputation time grows linearly with the projectedarea of the rigid objects. Adding a second charac-ter will approximately double the active area (see fig-ure 8), but the computation time for multiple charac-
ters can be reduced by using parallel processing whenthe characters are contacting independent patches ofground.
We have designed and implemented a parallelscheme for the ground surface simulation. A singleparent process maintains the state of the grid and co-ordinates the actions of the child processes. Duringinitialization, a child process is created for each char-acter that will interact with the ground surface. Thechildren communicate with the parent process via theUNIX socket mechanism and may exist together on asingle multiprocessor machine or on several separatesingle processor machines.
Each child computes the changes to the grid causedby its character as quickly as possible, without anydirect knowledge about the progress of the other chil-dren. When a child completes the computation for atime step, it reports the changes it has made to theparent process and then waits for information aboutany new grid cells that will be in the bounding boxfor its character during the next time step. However,if the child is ready to compute a time step before an-other child has reported prior changes that are withinthe bounding box of a character assigned to the firstchild, the parent will prevent the first child from con-tinuing until the changes are available. For example,in an animation of a cyclist that rides across a foot-print left by a runner, the child process computing thecyclist may arrive at the footprint location before theprocess computing the runner has simulated the cre-ation of the footprint. If two or more characters haveoverlapping bounding boxes for the same time step,the computation for those characters is reassigned toa single child process until they no longer overlap.
Simulation run times for both the serial and paral-lel versions of our algorithm are shown in figure 8. Asexpected, the time required by the serial implemen-tation grows linearly with the number of characters.Ideally, the time required by the parallel implemen-tation would be constant since each character has itsown processor. However, due to communication over-head and interactions between the characters, the runtime for the parallel version grows as the number ofcharacters increases, but at a much slower rate thanthe serial version.
4. Animation Parameters
One goal of this research is to create a tool that al-lows animators to easily generate a significant fractionof the variety seen in ground materials. Five param-eters of the simulation can be changed by the userto achieve di!erent e!ects: inside slope, outside slope,roughness, liquidity, and compression. The first four
c! The Eurographics Association 1999

8 R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow
Mud
Snow
Sand
Vid
eo
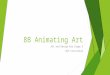
Figure 9: Images from video footage of a human runner stepping in sand and a simulated runner stepping insand, mud, and snow. The human runner images are separated by 0.133 s; the simulated images are separated by0.1 s.
Figure 10: Images of a runner tripping over an obstacle and falling onto the sand. The final image shows thepattern she made in the sand.
are used by the erosion algorithm, and the fifth is usedby the displacement algorithm.
The inside and outside slope parameters, "in and"out, modify the shape of a mound of ground materialby changing the slope adjacent to intersecting geom-etry and the slope on the outer part of the mound.Small values lead to more erosion and a more grad-ual slope; large values yield less erosion and a steeperslope.
Roughness, #, controls the irregularity of the grounddeformations by changing the amount of material thatis moved from one column to another during erosion.Small values yield a smooth mound of material whilelarger values give a rough, irregular surface.
Liquidity, "stop, determines how watery the material
appears by controlling the amount of erosion within asingle timestep. With less erosion per time step, thesurface appears to flow outward from the intersectingobject; with more erosion, the surface moves to itsfinal state more quickly.
The compression parameter, !, o!ers a way tomodel substances of di!erent densities by determin-ing how much displaced material is distributed out-ward from an object that has intersected the grid. Avalue of one causes all material to be displaced; a valueless than one allows some of the material to be com-pressed.
When particles are used, additional parameters arerequired to determine their appearance. We includedparameters to control adhesion, particle size, and the
c! The Eurographics Association 1999

R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow 9
E!ect Variable Sand Mud Snow
inside slope !in 0.8 1.57 1.57outside slope !out 0.436 1.1 1.57roughness " 0.2 0.2 0.2liquidity !stop 0.8 1.1 1.57compression # 0.3 0.41 0.0
Table 1: Table of parameters for the three ground ma-terials.
rate at which material falls o! of the objects. We usedparticles in the animations of sand but did not includethem in the animations of mud or snow. Other moredynamic motions such as skiing might generate signif-icant spray, but running in snow appears to generateclumps of snow rather than particles.
5. Results and Discussion
Figure 9 shows images of a human runner stepping insand and a simulated runner stepping in sand, mud,and snow. The parameters used for the simulations ofthe three ground materials are given in table 1. Thefootprints left by the real and simulated runners insand are quite similar.
Figures 7 and 10 show more complicated patternscreated in the sand by a falling bicycle and a trippingrunner. For each of these simulations, we used a gridresolution of 1 cm by 1 cm yielding a virtual grid sizeof 2048#1024 for the bicycle and 4096#512 for therunner.
The images in this paper were rendered with Pixar’sRenderMan software. We found that rendering theground surface using a polygonal mesh was compu-tationally expensive and that the data files requiredto describe the mesh were large and di"cult to workwith. We achieved better results using a single polygonwith a displacement shader that modeled the groundsurface.
The simulation described in this paper allows us tocapture many of the behaviors of substances such assand, mud, and snow. Only about fifteen iterationswere required to hand tune the parameters for the de-sired e!ect with each material. The computation timeis not burdensome: a 3-second simulation of the run-ning figure interacting with a 1 cm by 1 cm resolutionground material required less than 2minutes of com-putation time on a single 195MHz MIPS R10000 pro-cessor.
Many e!ects are missed by this model. For exam-ple, wet sand and crusty mud often crack and formlarge clumps, but our model can generate only smooth
Figure 11: Images of actual tire tracks in snow andhuman footprints in snow and in mud.
surfaces and particles. Actual ground material is notuniform but contains both small grains of sand or dirtas well as larger objects such as rocks, leaves, and seashells. More generally, many factors go into creatingthe appearance of a given patch of ground: water andwind erosion, plant growth, and the footprints of manypeople and animals. Some of these more subtle e!ectsare illustrated by the human footprints in snow andmud shown in figure 11.
One significant approximation in the ground simu-lation is that the motion of the rigid objects is nota!ected by the deformations of the surface. For thesequences presented here, each of the rigid body sim-ulations interacted with a flat, smooth ground plane.A more accurate and realistic simulation would allowthe bike and runner to experience the undulations inthe initial terrain as well as the changes in frictioncaused by the deforming surfaces. For example, a bikeis slowed down significantly when rolling on sand anda runner’s foot slips slightly with each step on softground.
Other approximations are present in the way thatthe sand responds to the motion of the rigid objects.For example, a given area of sand has no memoryof the compression caused by previous impacts. Be-cause the motion of the rigid objects are specified inadvance, this approximation does not cause any no-ticeable artifacts. Compression could also be used tochange rendering parameters as appropriate.
We do not take the velocity of the rigid object intoaccount in the ground simulation. For bicycling andrunning, this approximation is negligible because thevelocities of the wheel and the foot with respect tothe ground are small at impact. For the falling runneror bicycle, however, this approximation means thatthe ridge of sand is uniformly distributed rather thanforming a larger ridge in the direction of travel.
The motions of sand, mud, and snow that we gener-ated are distinctly di!erent from each other because ofchanges to the simulation parameters. Although muchof the di!erence is due to the deformations determinedby our simulations, part of the visual di!erence resultsfrom di!erent surface properties used for rendering. To
c! The Eurographics Association 1999

10 R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow
generate the images in this paper, we had not only toselect appropriate parameters for the simulation butalso to select parameters for rendering. A more com-plete investigation of techniques for selecting render-ing parameters and texture maps might prove useful.
We regard this simulation as appearance-basedrather than engineering-based because most of the pa-rameters bear only a scant resemblance to the physicalparameters of the material being modeled. The liquid-ity parameter, for example, varies between 0 and '/2rather than representing the quantity of water in agiven amount of sand. It is our hope that this repre-sentation for the parameters allows for intuitive ad-justment of the resulting animation without requiringa deep understanding of the simulation algorithms orsoil mechanics. The evaluation is also qualitative orappearance-based in that we compare simulated andvideo images of the footprints rather than matchinginitial and final conditions quantitatively.
Acknowledgments
A previous version of this paper appeared in The Pro-ceedings of Graphics Interface ’98.
This project was supported in part by NSF NYIGrant No. IRI-9457621 and associated REU fund-ing, Mitsubishi Electric Research Laboratory, and aPackard Fellowship. The second author was supportedby an Intel Fellowship.
References
1. F. Thomas and O. Johnston, Disney Animation:The Illusion of Life. New York: Abbeville Press,(1984).
2. K. Reisz and G. Millar, The Technique of FilmEditing. Focal Press, (1989).
3. D. Lundin, “Motion simulation”, in Nicograph’84, (Nov. 1984).
4. D. Lundin, “Works’ ant”, in SIGGRAPH VideoReview, vol. 100, ACM SIGGRAPH, (1994). Spe-cial Issue: Fifteen Years of Computer Graphics1979–1994.
5. X. Li and J. M. Moshell, “Modeling soil: Realtimedynamic models for soil slippage and manipula-tion”, in SIGGRAPH ’93 Conference Proceedings,pp. 361–368, ACM SIGGRAPH, (1993).
6. B. Chanclou, A. Luciani, and A. Habibi, “Phys-ical models of loose soils dynamically marked bya moving object”, in Computer Animation ’96,pp. 27–35, (1996).
7. T. Nishita, H. Iwasaki, and E. Nakamae, “A mod-eling and rendering method for snow by usingmetaballs”, Computer Graphics Forum, 16(3),pp. 357–364 (1997).
8. D. Ebert, K. Musgrave, D. Peachey, K. Perlin,and S.Worley, Texturing and Modeling: A Proce-dural Approach. New York: Academic Press, (Oct.1994).
9. J. Stam and E. Fiume, “Depicting fire and othergaseous phenomena using di!usion processes”, inSIGGRAPH ’95 Conference Proceedings, pp. 129–136, ACM SIGGRAPH, (1995).
10. N. Foster and D. Metaxas, “Modeling the mo-tion of a hot, turbulent gas”, in SIGGRAPH ’97Conference Proceedings, pp. 181–189, ACM SIG-GRAPH, (1997).
11. N. Chiba, S. Ohkawa, K. Muraoka, and M. Miura,“Two–dimensional visual simulation of flames,smoke and the spread of fire”, The Journalof Visualization and Computer Animation, 5(1),pp. 37–54 (1994).
12. T. Reed and B. Wyvill, “Visual simulation oflightning”, in SIGGRAPH ’94 Conference Pro-ceedings, pp. 359–364, ACM SIGGRAPH, (1994).
13. J. Wejchert and D. Haumann, “Animation aero-dynamics”, in SIGGRAPH ’91 Conference Pro-ceedings, pp. 19–22, ACM SIGGRAPH, (1991).
14. D. R. Peachey, “Modeling waves and surf”, inSIGGRAPH ’86 Conference Proceedings, pp. 65–74, ACM SIGGRAPH, (1986).
15. A. Fournier and W. T. Reeves, “A simple modelof ocean waves”, in SIGGRAPH ’86 Confer-ence Proceedings, pp. 75–84, ACM SIGGRAPH,(1986).
16. M. Kass and G. Miller, “Rapid, stable fluid dy-namics for computer graphics”, in SIGGRAPH’90 Conference Proceedings, pp. 49–57, ACM SIG-GRAPH, (1990).
17. J. F. O’Brien and J. K. Hodgins, “Dynamic sim-ulation of splashing fluids”, in Computer Anima-tion ’95, pp. 198–205, (1995).
18. N. Foster and D. Metaxas, “Realistic animationof liquids”, in Proceedings of Graphics Interface’96, pp. 204–212, (1996).
19. W. T. Reeves, “Particle systems–a technique formodeling a class of fuzzy objects”, ACM Trans-actions on Graphics, 2, pp. 91–108 (1983).
20. K. Sims, “Particle animation and rendering usingdata parallel computation”, in SIGGRAPH ’90
c! The Eurographics Association 1999

R. W. Sumner, J. F. O’Brien, and J. K. Hodgins / Animating Sand, Mud, and Snow 11
Conference Proceedings, pp. 405–413, ACM SIG-GRAPH, (1990).
21. G. Miller and A. Pearce, “Globular dynamics: Aconnected particle system for animating viscousfluids”, Computers and Graphics, 13(3), pp. 305–309 (1989).
22. D. Terzopoulos, J. Platt, and K. Fleischer, “Heat-ing and melting deformable models (from goop toglop)”, in Proceedings of Graphics Interface ’89,pp. 219–226, (1989).
23. R. Mech and P. Prusinkiewicz, “Visual modelsof plants interacting with their environment”, inSIGGRAPH ’96 Conference Proceedings, pp. 397–410, ACM SIGGRAPH, (1996).
24. J. Dorsey and P. Hanrahan, “Modeling and ren-dering of metallic patinas”, in SIGGRAPH ’96Conference Proceedings, pp. 387–396, ACM SIG-GRAPH, (1996).
25. J. Dorsey, H. K. Pedersen, and P. Hanrahan,“Flow and changes in appearance”, in SIG-GRAPH ’96 Conference Proceedings, pp. 411–420, ACM SIGGRAPH, (1996).
26. J. K. Hodgins, W. L. Wooten, D. C. Brogan, andJ. F. O’Brien, “Animating human athletics”, inSIGGRAPH ’95 Conference Proceedings, pp. 71–78, ACM SIGGRAPH, (1995).
27. J. Snyder, “An interactive tool for placingcurved surfaces without interpenetration”, inSIGGRAPH ’95 Conference Proceedings, pp. 209–218, ACM SIGGRAPH, (1995).
28. G. Turk, Generating Random Points in Triangles,vol. I of Graphics Gems, pp. 24–29. New York,NY: Academic Press, (1990).
c! The Eurographics Association 1999