Embed Size (px)
Citation preview

785
Animal Bioaco19. Animal Bioacoustics
Animals rely upon their acoustic and vibrationalsenses and abilities to detect the presence of bothpredators and prey and to communicate withmembers of the same species. This chapter sur-veys the physical bases of these abilities and theirevolutionary optimization in insects, birds, andother land animals, and in a variety of aquaticanimals other than cetaceans, which are treatedin Chap. 20. While there are many individual vari-ations, and some animals devote an immensefraction of their time and energy to acoustic com-munication, there are also many common featuresin their sound production and in the detectionof sounds and vibrations. Excellent treatmentsof these matters from a biological viewpoint aregiven in several notable books [19.1, 2] and col-lections of papers [19.3–8], together with othermore specialized books to be mentioned in thefollowing sections, but treatments from an acous-tical viewpoint [19.9] are rare. The main differencebetween these two approaches is that biologi-cal books tend to concentrate on anatomical andphysiological details and on behavioral outcomes,
19.1 Optimized Communication ................... 785
19.2 Hearing and Sound Production ............. 787
19.3 Vibrational Communication .................. 788
19.4 Insects ................................................ 788
19.5 Land Vertebrates ................................. 790
19.6 Birds .................................................. 795
19.7 Bats ................................................... 796
19.8 Aquatic Animals .................................. 797
19.9 Generalities ........................................ 799
19.10 Quantitative System Analysis ................ 799
References .................................................. 802
while acoustical books use simplified anatomicalmodels and quantitative analysis to model whole-system behavior. This latter is the approach to beadopted here.
19.1 Optimized Communication
Since animals use their acoustic and vibrational sensesboth to monitor their environment and to communicatewith other animals of the same species, we should ex-pect that natural selection has optimized these sensingand sound production abilities. One particular obviousoptimization is to maximize the range over which theycan communicate with others of the same species. Sim-ple observation shows that small animals generally usehigh frequencies for communication while large ani-mals use low frequencies – what determines the bestchoice? The belief that there is likely to be some sortof universal scaling law involved goes back to the clas-sic work of D’Arcy Thompson [19.10], while a modernoverview of physical scaling laws (though not includ-ing auditory communication) is given by West andBrown [19.11].
The simplest assumption is that the frequency isdetermined simply by the physical properties of thesound-producing mechanism. For a category of ani-mals differing only in size, the vibration frequencyof the sound-producing organ depends upon the lineardimensions of the vibrating structure, which are all pro-portional to the linear size L of the animal, and uponthe density ρ and elastic modulus E of the materialfrom which it is made. We can thus write that the songfrequency f = Aρx Ey Lz , where A, x, y, and z are con-stants. Since the dimensions of each side of the equationmust agree, we must have x = −1, y = 1 and z = −1,which leads to the conclusion that song frequency shouldbe inversely proportional to the linear size of the animalor, equivalently, that f ∝ M−1/3, where M is the massof the animal. This simple result agrees quite well with
PartF
19

786 Part F Biological and Medical Acoustics
5000
2000
20
200
100
50
1000
500
0.01 0.1 1 10 100 1000 10 000Animal mass (kg)
SmallBirds
Frequency (Hz)
Mice
Largebirds
Cats
Gorillas
Humans
Elephants
Horses
Monkeys
Dogs
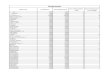
Fig. 19.1 The frequency ranges of the emphasized fre-quencies of vocalization in a large range of land-dwellinganimals, plotted as a function of the mass of the animal.The dashed line shows the regression f ∝ M−0.33 whilethe solid line is the regression f ∝ M−0.4, as discussed inthe text [19.12]
observation, as shown by the dashed line in Fig. 19.1, fora wide variety of animals, but a more detailed analysisis desirable.
Over reasonable distances in the air, sound spreadsnearly hemispherically, so that its intensity decays like1/R2, where R is the distance from the source. Butsound is also attenuated by atmospheric absorption, withthe attenuation coefficient varying as f 2. An optimallyevolved animal should have maximized its communica-tion distance under the influence of these two effects. Ananalysis [19.12] gives the result that f ∝ M−0.4 which,as shown in Fig. 19.1, fits the observations even betterthan the simpler result. There are, however, many out-liers even among the animals considered, due to differentanatomies and habitats. Insects, which must producetheir sound in an entirely different way as is discussedlater, are not shown on this graph, but there is a similarbut not identical relative size relation for them too.
The total sound power produced by an animal is alsoa function of its size, typically scaling about as M0.53 forair-breathing animals of a given category. When the vari-ation of song frequency is included, this leads [19.12]to a conspecific communication distance proportionalabout to M0.6. Again, while this trend agrees with gen-eral observations, there are many very notable outliersand great differences between different types of animals.Thus, while mammals comparable in size with humanstypically produce sound power in the range 0.1–10 mW,
and large birds may produce comparable power, somesmall insects such as cicadas of mass not much morethan 1 g can also produce almost continuous calls witha power of 1 mW, as will be discussed in Sect. 19.4. Atintermediate sizes, however, many animals, particularlyreptiles, are almost mute.
Elephants represent an interesting extreme in the ani-mal world because of their very large mass – as much as10 tonnes. Their calls, which have a fundamental in therange 14–35 Hz, can have an acoustic power as large as5 W, leading to a detection distance as large as 5 km, oreven up to 10 km after sunset on a clear night [19.13]when very low frequency propagation is aided by at-mospheric inversion layers (Chap. 4). Vegetation too, ofcourse, can have a significant effect upon transmissiondistance. These elephant calls are often misleadinglyreferred to as “infrasonic” in the biological literature,despite the fact that only the fundamental and perhapsthe second harmonic satisfy this criterion, and the callshave many harmonics well within the hearing range ofhumans. Indeed, even other elephants depend upon theseupper harmonics to convey information, and usually can-not recognize the calls of members of the same familygroup above a distance of about 1.5 km because of theattenuation of harmonics above about 100 Hz throughatmospheric absorption [19.14].
When it comes to sound detection, rather similarscaling principles operate. As will be discussed brieflyin Sect. 19.2, the basic neuro-physiological mechanismsfor the conversion of vibrations to neural impulses areremarkably similar in different animal classes, so thatit is to be expected that auditory sensitivity should varyroughly as the area of the hearing receptor, and thusabout as M2/3, and this feature is built into the analysisreferred to above. While a few animals have narrow-bandhearing adapted to detecting particular predators – forexample caterpillars detecting wing beats from wasps –or for conspecific communication, as in some insects,most higher animals require a wide frequency range soas to detect larger predators, which generally producesounds of lower frequency, and smaller prey, which mayproduce higher frequencies. The auditory range for mosthigher animals therefore extends with reasonable sensi-tivity over a frequency range of about a factor 300, withthe central frequency being higher for smaller animals.In the case of mammals comparable in size to humans,the range for mature adults is typically about 50 Hz to15 kHz. This wide range, however, means that irrele-vant background noise can become a problem, so thatconspecific call frequencies may be adapted, even overa short time, to optimize communication. Small echo-
PartF
19.1

Animal Bioacoustics 19.2 Hearing and Sound Production 787
locating animals, such as bats, generally have a band ofenhanced hearing sensitivity and resolution near theircall frequency.
Aquatic animals, of course, operate in very differentacoustic conditions to land animals, because the densityof water nearly matches that of their body tissues. In ad-
dition, while the water medium may be considered tobe essentially three-dimensional over small distances, itbecomes effectively two-dimensional for the very long-distance communication of which some large aquaticanimals are capable. Some of these matters will bediscussed in Sect. 19.8.
19.2 Hearing and Sound Production
Despite the large differences in anatomy and the greatseparation in evolutionary time between different an-imals, there are many surprising similarities in theirmechanisms of sound production and hearing. The ba-sic mechanism by which sound or vibration is convertedto neural sensation is usually one involving displace-ment of a set of tiny hairs (cilia) mounted on a cell insuch a way that their displacement opens an ion channeland causes an electric potential change in the cell, ulti-mately leading to a nerve impulse. Such sensory hairsoccur in the lateral line organs of some species of fish,supporting the otoliths in other aquatic species, and inthe cochlea of land-dwelling mammals. Even the sen-sory cells of insects are only a little different. In thesubsequent discussion there will not be space to con-sider these matters more fully, but they are treated inmore detail in Chap. 12.
Somewhat surprisingly, the auditory sensitivities ofanimals differing widely in both size and anatomy varyless than one might expect. Human hearing, for exam-ple, has a threshold of about 20 µPa in its most sensitivefrequency range between 500 Hz and 5 kHz, where mostauditory information about conspecific communicationand the cries of predators and prey is concentrated, andthe sensitivity is within about 10 dB of this value overa frequency range from about 200 Hz to 7 kHz. Othermammals have very similar sensitivities with frequencyranges scaled to vary roughly as the inverse of their lineardimensions, as discussed in Sect. 19.1. Insects in gen-eral have narrower bandwidth hearing matched to songfrequencies for conspecific communication. Of course,with all of these generalizations there are many outlierswith very different hearing abilities.
Sound production mechanisms fall into two cate-gories depending upon whether or not the animal isactively air-breathing. For air-breathing animals thereis an internal air reservoir, the volume and pressure ofwhich are under muscular control, so that air can be ei-ther inhaled or exhaled. When exhalation is done throughsome sort of valve with mechanically resonant flaps or
membranes, it can set the valve into vibration, thus pro-ducing an oscillatory exhalation of air and so a soundsource. In the case of aquatic mammals, which are alsoair-breathing, it would be wasteful to exhale the air,so that it is instead moved from one reservoir to an-other through the oscillating valve, the vibration of thethin walls of one of the reservoirs then radiating thesound, as is discussed in more detail in Chap. 19. An-imals such as insects that do not breathe actively mustgenerally make use of muscle-driven mechanical vibra-tions to produce their calls, though a few such as thecockroach Blaberus can actually make “hissing” noisesthrough its respiratory system when alarmed.
The amount of muscular effort an animal is preparedto expend on vocalization varies very widely. Humans,apart from a few exceptions such as trained singers, canproduce a maximum sound output of a few hundred mil-liwatts for a few seconds, and only about 10 mW foran extended time. In terms of body mass, this amountsto something around 0.1 mW kg−1. At the other end ofthe scale, some species of cicada with body mass ofabout 1 g can produce about 1 mW of sound output ata frequency of about 3 kHz, or about 1000 mW kg−1
on a nearly continuous basis. An interesting compara-tive study of birdsongs by Brackenbury [19.15] showedsound powers ranging from 0.15 to 200 mW and relativepowers ranging from 10 to 870 mW kg−1. The clear win-ner on the relative power criterion was the small Turdusphilomelos with a sound output of 60 mW and a bodymass of only 69 g, equivalent to 870 mW kg−1, whilethe loudest bird measured was the common rooster Gal-lus domesticus with a sound output during crowing of200 mW. Its body mass of 3500 g meant, however, thatits relative power was only 57 mW kg−1.
Nearly all sound-production mechanisms, rangingfrom animals through musical instruments to electricallydriven loudspeakers, are quite inefficient, with a ra-tio of radiated acoustic power to input power of notmuch more than 1%, and often a good deal less thanthis. In the case of air-breathing animals, the losses
PartF
19.2

788 Part F Biological and Medical Acoustics
are largely due to viscosity-induced turbulence abovethe vocal valve, while in insects that rely upon vibrat-ing body structures internal losses in body tissue aredominant. Wide-bandwidth systems such as the humanvocal apparatus are generally much less efficient than
narrow-band systems, the parameters of which can beoptimized to give good results at a single song frequency.To all this must then be added the internal metabolicloss in muscles, which has not been considered in the1% figure.
19.3 Vibrational Communication
Most animals are sensitive to vibrations in materials orstructures with which they have physical contact. Evenhumans can sense vibrations over a reasonably large fre-quency range by simply pressing finger tips against thevibrating object, while vibrations of lower frequency canalso be felt through the feet, without requiring any spe-cialized vibration receptors. Many insects make use ofthis ability to track prey and also for conspecific com-munication, and some for which this mode of perceptionis very important have specialized receptors, called sub-genual organs, just below a leg joint. A brief survey forthe case of insects has been given by Ewing [19.16].
For water gliders and other insects that hunt insectsthat have become trapped by surface tension on the sur-face of relatively still ponds, the obvious vibratory signalis the surface waves spreading out circularly from thestruggles of the trapped insect. The propagation of thesesurface waves on water that is deep compared with thewavelength has been the subject of analysis, and the cal-culated wave velocity cs, which is influenced by boththe surface tension T of water and the gravitational ac-celeration g, is found to depend upon the wavelength λ
according to the relation
cs =(
2πT
ρwλ+ gλ
2π
)1/2
, (19.1)
where ρw is the density of water. From the form of thisrelation it is clear that the wave speed has a minimumvalue when λ = 2π(T/gρw)1/2, and substituting numer-ical values then gives a wavelength of about 18 mm,a propagation speed of about 24 cm s−1, and a fre-quency of about 1.3 Hz. Waves of about this wavelengthwill continue to move slowly across the surface after
other waves have dissipated. The attenuation of all thesesurface waves is, however, very great.
From (19.1) it is clear that, at low frequenciesand long wavelengths, the wave speed cs is con-trolled by gravitational forces and cs ≈ g/ω. These arecalled gravity waves. At high frequencies and shortwavelengths, surface tension effects are dominant andcs ≈ (Tω/ρw)1/3. These are called capillary waves. Thefrequencies of biological interest are typically in therange 10 to 100 Hz, and so are in the in the lower partof the capillary-wave regime, a little above the cross-over between these two influences, and the propagationspeeds are typically in the range 30 to 50 cm s−1.
For insects and other animals living aloft in trees andplants, the waves responsible for transmission of vibra-tion are mostly bending waves in the leaves or branches.The wave speed is then proportional to the square rootof the thickness of the structure and varies also as thesquare root of frequency. Transmission is very slow com-pared with the speed of sound in air, although generallymuch faster than the speed of surface waves on water.Once again, the attenuation with propagation distance isusually large.
Disturbances on heavy solid branches or on solidground also generate surface waves that can be detectedat a distance, but these waves propagate with nearly thespeed of shear waves in the solid, and thus at speeds oforder 2000 m s−1. On the ground they are closely relatedto seismic waves, which generally have much larger am-plitude, and animals can also detect these. Underground,of course, as when an animal is seeking prey in a shal-low burrow, the vibration is propagated by bulk shearand compressional waves.
19.4 Insects
The variety of sound production and detection mechan-isms across insect species is immense [19.3,16–18], buttheir acoustic abilities and senses possess many featuresin common. Many, particularly immature forms such ascaterpillars but also many other insects, use external sen-
sory hairs to detect air movement and these can senseboth acoustic stimuli, particularly if tuned to resonance,or the larger near-field air flows produced by the wingsof predators [19.19]. These hairs respond to the viscousdrag created by acoustic air flow past them and, since
PartF
19.4

Animal Bioacoustics 19.4 Insects 789
this is directional, the insect may be able to gain someinformation about the location of the sound source.
Analysis of the behavior of sensory hairs is com-plex [19.19], but some general statements can be made.Since what is being sensed is an oscillatory flow of airacross the surface of the insect, with the hair stand-ing normal to this surface, it is important that the hairbe long enough to protrude above the viscous bound-ary layer, the thickness of which varies inversely withthe square root of frequency and is about 0.1 mm at150 Hz. This means that the length of the hair shouldalso be about inversely proportional to the frequency ofthe stimulus it is optimized to detect, and that it shouldtypically be at least a few tenths of a millimeter in length.The thickness of the hair is not of immense importance,provided that it is less than about 10 µm for a typicalhair, since much of the effective mass is contributed byco-moving fluid. At the mechanical resonance frequencyof the hair, the sensitivity is a maximum, and the hairtip displacement is typically about twice the fluid dis-placement, provided the damping at the hair root is not
TubeSept
Tube
Tube Tube
Tymp
p2
p4
p1
p3
Tymp
BodySpiracles
p2p1
Leg
p4p3
Septum
Tympana
a)
b)
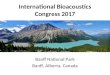
Fig. 19.2 (a) Schematic drawing of the auditory anatomyof a cricket. (b) Simplified electric network analog for thissystem. The impedances of the tympana and the septumare each represented by a set of components L, R, C con-nected in series; the tube impedances are represented by2 × 2 matrices. The acoustic pressures pi acting on the sys-tem are generally all nearly equal in magnitude, but differin phase depending upon the direction of incidence of thesound
large, but the response falls off above and below thisfrequency.
Mature insects of some species, however, have au-ditory systems that bear a superficial resemblance tothose of modern humans in their overall structure. Thusfor example, and referring to Fig. 19.2a, the cricket hasthin sensory membranes (tympana or eardrums) on itsforelegs, and these are connected by tubes (Eustachiantubes) that run to spiracles (nostrils) on its upper body,the left and right tubes interacting through a thin mem-brane (nasal septum) inside the body. Analysis of thissystem [19.9] shows that the tubes and membranes areconfigured so that each ear has almost cardioid response,directed ipsilaterally, at the song frequency of the insect,allowing the insect to detect the direction of sound ar-rival. Some simpler auditory systems showing similardirectional response are discussed in Sect. 19.5.
Detailed analysis of the response of anatomicallycomplex systems such as this is most easily carriedout using electric network analogs, in which pressureis represented by electric potential and acoustic flow byelectric current. Tubes are then represented as 2 × 2 ma-trices, diaphragms by L, R, C series resonant circuits,and so on, as shown in Fig. 19.2b. Brief details of thisapproach are given in Sect. 19.10 and fuller treatmentscan be found in the published literature [19.9, 20].
When it comes to sound production, insects are verydifferent from other animals because they do not havethe equivalent of lungs and a muscle-driven respira-tory systems. They must therefore generally rely uponmuscle-driven vibration of diaphragms somewhere onthe body in order to produce sound. One significantexception is the Death’s Head Hawk Moth Acherontiaatropos, which takes in and then expels pulses of airfrom a cavity closed by a small flap-valve that is set intooscillation by the expelled air to produce short soundpulses [19.16].
Some insects, such as cicadas, have a large ab-dominal air cavity with two areas of flexible ribbedcartilage that can be made to vibrate in a pulsatory man-ner under muscle action, progressive buckling of themembrane as the ribs flip between different shapes ef-fectively multiplying the frequency of excitation by asmuch as a factor 50 compared with the frequency ofmuscle contraction. The coupling between these tymbalmembranes and the air cavity determines the oscilla-tion frequency, and radiation is efficient because of themonopole nature of the source. The sound frequency istypically in the range 3 to 5 kHz, depending upon insectsize, and the radiated acoustic power can be as large as1 mW [19.21] on an almost continuous basis, though the
PartF
19.4

790 Part F Biological and Medical Acoustics
File
Resonant structure
Pic
Fig. 19.3 Configuration of a typical file and pic as used bycrickets and other animals to excite resonant structures ontheir wing cases
actual sound signal may consist of a series of regularlyspaced bursts corresponding to tymbal collapses and re-bounds. Again, there are occasional insects that havedeveloped extreme versions of this sound producingmechanism, such as the bladder cicada Cystosoma Saun-dersii (Westwood), in which the whole greatly extendedabdomen is a resonant air sac and the song frequency isonly 800 Hz.
Most other insects do not have significant bodily aircavities and must produce sound by causing parts oftheir body shell or wings to vibrate by drawing a ribbedfile on their legs, or in some cases on their wings, acrossthe hard rim of the membrane, as shown in Fig. 19.3.The anatomical features making up the file and vibrat-ing structure vary very greatly across species, as has beendiscussed and illustrated in detail by Dumortier [19.22].In some cases the file is located on the vibrating struc-ture and the sharp pic on the part that is moving. Thepassage of the pic across each tooth or rib on the filegenerates a sharp impulse that excites a heavily dampedtransient oscillation of the vibrator, and each repetitivemotion of the leg or other structure passes the pic overmany teeth. A typical insect call can therefore be sub-divided into (a) the leg motion frequency, (b) the picimpact frequency on the file, and (c) the oscillation fre-quency of the vibrating structure. Since the file may have10 or more teeth, the frequency of the pic impacts willbe more than 10 times the frequency of leg motion, and
a)
b)
Fig. 19.4a,b Structure of the sound emitted by a typicalinsect: (a) three strokes of the file, the individual oscillationsbeing the pic impacts on the file teeth; (b) expanded viewof four of the pulses in (a), showing resonant oscillations ofthe structure produced by successive pic impacts on the file
the structural oscillation may be 10 times this frequency.The structure of a typical call is thus of the form shown inFig. 19.4. The dominant frequency is usually that of thestructural vibration, and this varies widely from about2 to 80 kHz depending upon species and size [19.23].Because of the structure of the call, the frequency spec-trum appears as a broad band centered on the structuralvibration frequency.
Such a vibrating membrane is a dipole source andso is a much less efficient radiator than is a monopolesource, except at very high frequencies where the wingdimensions become comparable with the sound wave-length excited. Small insects therefore generally havesongs of higher frequency than those that are larger,in much the same way as discussed in Sect. 19.1 forother animals. Some crickets, however, have evolvedthe strategy of digging a horn-shaped burrow in theearth and positioning themselves at an appropriate placein the horn so as to couple their wing vibrations effi-ciently to the fundamental mode of the horn resonator,thus taking advantage of the dipole nature of theirwing source and greatly enhancing the radiated soundpower [19.24].
19.5 Land Vertebrates
The class of vertebrates that live on land is in many waysthe most largely studied, since they bear the closest re-lation to humans, but these animals vary widely in sizeand behavior. Detailed discussion of birds is deferred toSect. 19.6, since their songs warrant special attention,while human auditory and vocal abilities are not con-
sidered specifically since they are the subject of severalother chapters. Reptiles, too, are largely omitted fromdetailed discussion, since most of them are not notablyvocal, and bats are given special attention in Sect. 19.7.
The feature possessed by all the land-dwelling verte-brates is that they vocalize using air expelled from their
PartF
19.5

Animal Bioacoustics 19.5 Land Vertebrates 791
inflated lungs through some sort of oscillating vocalvalve. The available internal air pressure depends uponthe emphasis put by the species on vocalization, but istypically in the range 100–2000 Pa (or 1–20 cm watergauge) almost independent of animal size, which is whatis to be expected if the breathing muscles and lung cavitydiameter scale about proportionally with the linear sizeof the animal. There are, however, very wide variations,as discussed in Sect. 19.2. The auditory abilities of mostanimals are also rather similar, the 20 dB bandwidth ex-tending over a factor of about 100 in frequency andwith a center-frequency roughly inversely proportionalto linear size, though again there are outliers, as shownin Fig. 19.1. Although the auditory and vocalization fre-quencies of different animals both follow the same trendwith size, the auditory systems generally have a muchlarger frequency range than the vocalizations for severalreasons. The first is that hearing serves many purposesin addition to conspecific communication, particularlythe detection of prey and predators. The second is that,particularly with the more sophisticated animals, thereare many nuances of communication, such as the vowelsand consonants in human speech, for which informationis coded in the upper parts of the vocalization spectrum.
a) b)
Fig. 19.5a,b A typical time-resolved spectrum for (a) hu-man female speech, and (b) the cry of a raven, the level ofeach frequency component being indicated by its darkness.The frequency range is 0–6 kHz and the duration about 0.7 sin (a) and 0.5 s in (b). It can be seen that at any instant thespectrum consists of harmonics of the fundamental, withparticular bands of frequencies being emphasized. Theseare the formant bands that distinguish one vowel from an-other in humans and enable similar distinctions to be madeby other animals. Consonants in human speech consist ofbroadband noise, an example occurring at the beginningof the second syllable in (a), and other animals may havesimilar interpolations between the tonal sounds
For humans, for example, the primary vocalization fre-quency is typically in the range 100 to 300 Hz, but thefrequency bands that are emphasized in vowel formantslie between 1 and 3 kHz. The same pattern is exhibitedin the vocalizations of other air-breathing animals, asshown for the case of a raven in Fig. 19.5. The sameformant structure is seen in the cries of elephants, witha fundamental in the range 25–30 Hz and in high-pitchedbird songs, which may have a fundamental above 4 kHz.
In most such animals, sound is produced by exhal-ing the air stored in the lungs through a valve consistingof two taut tissue flaps or membranes that can be madeto almost close the base of the vocal tract, as shownin Fig. 19.6a. The lungs in mammals are a complicated
a)
b)
Lung
Bronchus Trachea
Vocalfolds Tongue
Lips
Mouth
Lung
Bronchus
Trachea
Beak
Mouth
TongueSyrinx
Fig. 19.6 (a) Sketch of the vocal system of a typical landmammal. The lungs force air through the dual-flap vocal-fold valve, producing a pulsating flow of air that is richin harmonics of the fundamental frequency. Resonances ofthe upper vocal tract, which can be modified by motion ofthe tongue and lips, produce formants in the sound spec-trum which encode vocal information. (b) Sketch of thevocal system of a typical song-bird. There are two inflated-membrane valves in the syrinx just below the junction ofthe bronchi with the trachea, which may be operated ei-ther separately or together. Again a harmonic-rich airflowis produced that can either have formants imposed by reso-nances of the vocal tract and beak, or can be filtered to nearpure-tone form by an inflated sac in the upper vocal tract
PartF
19.5

792 Part F Biological and Medical Acoustics
quasi-fractal dendritic network of tubules with as manyas 16 stages of subdivision, the final stage being ter-minated by alveolar sacs that provide most of storagevolume. The interaction of exhaled air pressure and airflow with the flaps of this valve when they have beenbrought together (or adducted) causes them to vibrateat very nearly their natural frequency, as determined bymass and tension, and this in turn leads to an oscillat-ing air flow through the valve. The classic treatment ofthe human vocal valve is that of Ishizaka and Flana-gan [19.25], but there have been many more recenttreatments exploring modifications and refinements ofthis model. Very similar vocal valves are found in othermammals, while the major difference in the case of birdsis that the flaps of the vocal folds are replaced by opposedtaut membranes inflated by air pressure in cavities be-hind them, and there may be two such valves, as shownin Fig. 19.6b and discussed later in Sect. 19.6.
In most cases, the vibration frequency of the valveis very much lower than the frequency of the first max-imum in the upper vocal tract impedance. The valvetherefore operates in a nearly autonomous manner ata frequency determined by its geometry, mass and ten-sion and, to a less extent, by the air pressure in theanimal’s lungs. Because any such valve is necessarilynonlinear in its flow properties, particularly if it actuallycloses once in each oscillation cycle, this mechanismgenerates an air flow, and thus a sound wave in the vo-cal tract, containing all harmonics of the fundamentaloscillation. The radiated amplitudes of these harmonicscan be modified by resonances in the air column of thevocal tract to produce variations in sound quality andpeaks in the radiated spectrum known generally as vo-cal formants. Changing the tension of the valve flapschanges the fundamental frequency of the vocal sound,but the frequencies of the formants can be changed in-dependently by moving the tongue, jaws, and lips orbeak.
To be more quantitative, suppose that the pressurebelow the valve is p0 and that above the valve p1. If thewidth of the opening is W and its oscillating dimensionis x(t), then the volume flow U1 through it is determinedprimarily by Bernoulli’s equation and is approximately
U1(t) =(
2(p0 − p1)
ρ
)1/2
Wx(t) , (19.2)
where ρ is the density of air. In order for the valve tobe maintained in oscillation near its natural frequencyf , the pressure difference p0 − p1 must vary with theflow and with a phase that is about 90◦ in advance of thevalve opening x(t). This can be achieved if the acous-
tic impedance of the lungs and bronchi is essentiallycompliant, and that of the upper vocal tract small, at theoscillation frequency. The fact that this pressure differ-ence appears as a square root in (19.2) then introducesupper harmonic terms at frequencies 2 f , 3 f, . . . intothe flow U(t). Allowance must then be made for thefact that the vocal valve normally closes for part of eachoscillation cycle, so that x(t) is no longer simply sinu-soidal, and this introduces further upper-harmonic termsinto the flow. This is, of course, a very condensed andsimplified treatment of the vocal flow dynamics, andfurther details can be found in the literature for the caseof mammalian, and specifically human, animals [19.25]and also for birds [19.26].
This is, however, only the beginning of the analysis,for it is the acoustic flow out of the mouth that determinesthe radiated sound, rather than the flow from the vocalvalve into the upper vocal tract. Suppose that the acousticbehavior of the upper vocal tract is represented by a 2 ×2matrix, as shown in Fig. 19.11 of Sect. 19.10, and thatthe mouth or beak is regarded as effectively open so thatthe acoustic pressure p2 at this end of the tract is almostzero. Then the acoustic volume flow U2 out of the mouthat a particular angular frequency ω is
U2 = Z21
Z22U1 , (19.3)
where U1 is the flow through the larynx or syrinx at thisfrequency. For the case of a simple cylindrical tube oflength L at angular frequency ω, this gives
U2 = U1
cos kL, (19.4)
where k = (ω/c)− iα, c is the speed of sound in air, andα is the wall damping in the vocal tract. If the spec-trum of the valve flow U1 has a simple envelope, as isnormally the case, then (19.4) shows that the radiatedsound power, which is proportional to ω2U2
2 , has max-ima when ωL/c = (2n −1)π/2, and thus in a sequence1, 3, 5, . . . These are the formant bands, the precise fre-quency relationship of which can be varied by changingthe geometry of the upper vocal tract, which in turnchanges the forms of Z21 and Z22.
Some other air-breathing animals (and even humansopranos singing in their highest register) however, ad-just their vocal system so that the frequency of the vocalvalve closely matches a major resonance of the uppervocal tract, usually that of lowest frequency but not nec-essarily so. Some species of frogs and birds achieve thisby the incorporation of an inflatable sac in the upper vo-cal tract. In some cases the sac serves simply to provide
PartF
19.5

Animal Bioacoustics 19.5 Land Vertebrates 793
a resonance of appropriate frequency, and the sound isstill radiated through the open mouth, but in others thewalls of the sac are very thin so that they vibrate underthe acoustic pressure and provide the primary radiationsource. This will be discussed again in Sect. 19.6 in re-lation to bird song, but the analysis for frog calls isessentially the same.
The overall efficiency of sound production in ver-tebrates is generally only 0.1–1%, which is about thesame as for musical instruments. The acoustic outputpower output is typically in the milliwatt range even forquite large animals, but there is a very large variationbetween different species in the amount of effort that isexpended in vocalization.
The hearing mechanism of land-dwelling vertebratesshows considerable similarity across very many species.Sound is detected through the vibrations it induces ina light taut membrane or tympanum, and these vibrationsare then communicated to a transduction organ wherethey are converted to nerve impulses, generally throughthe agency of hair cells. The mechanism of neural trans-duction and frequency discrimination is complex, and itsexplanation goes back to the days of Helmholtz [19.27]in the 19th century, with the generally accepted cur-rent interpretation being that of von Békésy [19.28] inthe mid-20th century. Although these studies relatedspecifically to human hearing, the models are generallyapplicable to other land-dwelling vertebrates as well, assurveyed in the volume edited by Lewis et al. [19.29].All common animals have two auditory transducers, orears, located on opposite sides of the head, so that theyare able to gain information about the direction fromwhich the sound is coming.
In the simplest such auditory system, found for ex-ample in frogs, the two ears open directly into the mouthcavity, as shown in Fig. 19.7a, one neural transducer be-ing closely coupled to each of the two tympana. Sucha system is very easily analyzed at low frequencies wherethe cavity presents just a simple compliance with no res-onances of its own. Details of the approach are similar tothose for the more complex system to be discussed next.For a typical case in which the ears are separated by20 mm, the cavity volume is 1 cm3, and the loaded tym-panum resonance is at 500 Hz, the calculated responsehas the form shown in Fig. 19.7b. Directional discrimi-nation is best at the tympanum resonance frequency andcan be as much as 20 dB. In a more realistic model forthe case of a frog, the nostrils must also be included,since they lead directly into the mouth and allow the en-try of sound. The calculated results in this case showthat the direction of maximum response for each ear is
b)
c)
I
C
100 300 1000 3000 10000
10–6
10–7
10–8
10–9
Frequency (Hz)
Displacement (m)
a)
Neuraltransducers
Tympanum
Cavity0.8
0.4
0.5
–100 –20 dBCI
Fig. 19.7 (a) A simple frog-ear model; (b) the calculatedfrequency response for ipsilateral (I) and contralateral (C)sound signals for a particular optimized set of parametervalues; (c) the calculated directivity at different frequencies,shown in kHz as a parameter (from [19.9])
a)
b)
c)Auditory canal
Tympana
I
C
100 300 1000 3000 10000
10–7
10–8
10–9
10–10
Frequency (Hz)
Displacement (m)
0.8 2.01.2
–100 –20 dBCI
Fig. 19.8 (a) Idealized model of the auditory system ofa lizard or bird. Each tympanum is connected to a neuraltransducer and the two are joined by a simple tube. (b) Re-sponse of a particular case of the system in (a) to ipsilateral(I) and contralateral (C) sound of amplitude 0.1 Pa (equiva-lent to 74 dB re 20 µPa). The tube diameter is assumed tobe 5 mm and its length 20 mm, while the tympana havea thickness of 10 µm and are tensioned to a resonance fre-quency of 1000 Hz. (c) Directional response of this hearingsystem (from [19.9])
PartF
19.5

794 Part F Biological and Medical Acoustics
shifted towards the rear of the animal, typically by asmuch as 30◦ [19.9].
In another simple auditory system such as that ofmost reptiles, and surprisingly birds, the two tympanaare located at the ends of a tube passing through the headand each is supplied with its own neural transducer, asshown in Fig. 19.8a. The tympana may be recessed at theend of short tubes to provide protection, these tubes onlyslightly modifying the frequency response. The behav-ior of such a system can be analyzed using the electricnetwork analogs discussed in Sect. 19.10, with each tym-panum involving a series L , R, C combination and thetube being represented by a 2 × 2 impedance matrix Zij .If the sound comes from straight in front, then it is thesame in magnitude and phase at each ear, so that theirresponses are necessarily the same. When the soundcomes from one side, however, there is a phase differ-ence between the two ear pressures, along with a ratherless significant amplitude difference. The motion of eachtympanum is determined by the difference between theinternal and external pressures acting upon it, and the in-ternal pressure depends upon the signal transferred fromthe opposite tympanum, modified by the phase delay orresonance of the coupling tube. The analysis is straight-forward, but the resulting behavior, which depends uponthe mass and tension of the tympana and the length anddiameter of the connecting tube, can only be determinedby explicit calculation [19.9]. When these parametersare appropriately chosen, each ear has a strongly di-rectional response near the resonance frequency of thetympana, as shown in Fig. 19.8b, c. The balance betweenthe depth and sharpness of the contralateral minimum isaffected by the acoustic absorption in the walls of theconnecting canal. In some animals, the bone lining ofthis canal is actually porous, which reduces the effec-tive sound-wave velocity inside it and so increases thephase shift between internal and external signals, a fea-ture that is of assistance when the physical separation ofthe ears is small.
In most mammals and other large animals, the audi-tory system is modified in several significant ways. Thefirst is that the auditory canal joining the two ears in birdsand reptiles has generally degenerated in mammals tothe extent that each ear functions nearly independently.The connecting canal in humans has become the pairof Eustachian tubes running from the middle ear cav-ity, which contains the bones linking the tympanum tothe cochlea, down to the nasal cavities, and its main
purpose is now simply to equalize internal and externalstatic pressures and to drain excess fluids. The middleear cavity itself is necessary in order that the enclosedair volume be large enough that it does not raise the res-onance frequency of the tympanum by too much. Thetopology of the whole system is surprisingly similar tothat of the cricket auditory system shown in Fig. 19.2a,but the functions of some of the elements are now ratherdifferent.
The other major change is that, instead of the tym-pana being located almost on the surface of the animal,they are buried below the surface at the end of short audi-tory canals (meati), which lead to external ears (pinnae)in the shape of obliquely truncated horns. As well asprotecting the tympana from mechanical damage, thecanals add a minor resonance of their own, generallyin the upper part of the auditory range of the animalconcerned. The pinnae both increase the level of thepressure signal, typically by about 10 dB and in somecases even more, and impart a directionality to the re-sponse [19.9, 30]. The convoluted form of some pinnaealso imparts directionally-excited resonances that helpdistinguish direction from tonal cues, a feature that isnecessary in order to distinguish up/down directions forsounds coming from immediately ahead or immediatelybehind. Some animals with particularly large pinnae,such as kangaroos, are able to rotate these independentlyto help locate a sound source. In all such cases, however,the neural system plays a large part in determining sounddirection by comparing the phases and amplitudes, andsometimes the precise timing of transients, in the signalsreceived by the two ears.
In a hearing system of any simple type it is clear that,if geometrical similarity is maintained and the systemis simply scaled to the linear size of the animal con-cerned, then the frequency of maximum discriminationwill vary as the inverse of the linear size of the animal,giving an approximate match to general trend of vocal-ization behavior. There is, however, one anomaly to benoted [19.31]. Vocalizations by some frogs have funda-mental frequencies as high as 8 kHz and the vocal signalcontains prominent formant bands in the case studied at20 kHz and 80 kHz, so that they might almost be classedas ultrasonic. Despite this, behavioral evidence indicatesthat these frogs cannot hear signals much above 10 kHz,so that perhaps the formant bands are simply an epiphe-nomenon of the sound production system. The same istrue of the calls of some birds.
PartF
19.5

Animal Bioacoustics 19.6 Birds 795
19.6 Birds
Because of their generally melodious songs, birds haveexcited a great deal of attention among researchers, asdescribed in several classic books [19.32, 33]. Hearingdoes not require further discussion because the audi-tory system is of the simple tube-coupled type discussedin Sect. 19.5 and illustrated in Fig. 19.8. Research in-terest has focused instead on the wide range of songtypes that are produced by different species. These rangefrom almost pure-tone single-frequency calls producedby doves, and whistle-like sounds sweeping over morethan a 2:1 frequency range produced by many otherspecies, through wide-band calls with prominent for-mants, to the loud and apparently chaotic calls of theAustralian sulfur-crested cockatoo. Some birds can evenproduce two-toned calls by using both syringeal valvessimultaneously but with different tuning.
As noted in Sect. 19.5 and illustrated in Fig. 19.6b,song birds have a syrinx consisting of dual inflated-membrane valves, one in each bronchus just below theirjunction with the trachea. These valves can be operatedsimultaneously and sometimes at different frequencies,but more usually separately, and produce a pulsatingair-flow rich in harmonics. In birds such as ravens, theimpedance maxima of the vocal tract, as measured atthe syringeal valve, produce emphasized spectral bandsor formants much as in human speech, as is shown inFig. 19.5. The vocal tract of a bird is much less flexible inshape than is that of a mammal, but the formant frequen-cies can still be altered by changes in tongue position andbeak opening. Studies with laboratory models [19.34]show that the beak has several acoustic functions. Whenthe beak is nearly closed, it presents an end-correctionto the trachea that is about half the beak length athigh frequencies, but only about half this amount atlow frequencies, so that the formant resonances arebrought closer together in frequency. As the beak gapeis widened, the end-correction reduces towards the nor-mal value for a simple open tube at all frequencies. Thebeak also improves radiation efficiency, particularly athigher frequencies, by about 10 dB for the typical beakmodeled. Finally, the beak enhances the directionalityof the radiated sound, particularly at high frequenciesand for wide gapes, this enhanced directionality beingas much as 10 dB compared with an isotropic radiator.
The role of the tongue has received little attentionas yet, partly because it is rather stiff in most species ofbirds. It does, however, tend to constrict the passage be-tween the top of the trachea and the root of the beak,and this constriction can be altered simply by raising
the tongue, thereby exaggerating the end-correction pro-vided to the trachea by the beak. These models of beakbehavior can be combined with models of the syrinxand upper vocal tract [19.26] to produce a fairly goodunderstanding of vocalization in birds such as ravens.The fundamental frequency of the song can be changedby changing the muscle tension and thus the naturalresonance frequency of the syringeal valve, while theformants, and thus the tone of the song, can be var-ied by changing the beak opening and tongue position.The role of particular anatomical features and muscu-lar activities in controlling the fundamental pitch of thesong has since been verified by careful measurement andmodeling [19.35, 36].
Some birds have developed the ability to mimic oth-ers around them, a notable example being AustralianLyrebirds of the family Menuridae which, as well asimitating other birds, have even learned to mimic human-generated sounds such as axe blows, train whistles, andeven the sound of film being wound in cameras. Therehas also been considerable interest in the vocalizationof certain parrots and cockatoos, which can produce,as well as melodious songs, quite intelligible imitationsof human speech. The important thing here is to pro-duce a sound with large harmonic content and then totune the vocal tract resonances, particularly those thathave frequencies in the range 1–2.5 kHz, to match thoseof the second and third resonances of the human vo-cal tract, which are responsible for differentiating vowelsounds. Consonants, of course, are wide-band noise-liketransients. Careful studies of various parrots [19.37, 38]show that they can achieve this by careful positioningof the tongue, much in the way that humans achievethe same thing but with quantitative differences be-cause of different vocal tract size. The match to humanvowels in the second and third human formants can bequite good. The first formant, around 500 Hz in humans,is not reproduced but this is not important for vowelrecognition.
These studies produce a good understanding of thevocalization of normal song-birds, the calls of whichconsist of a dominant fundamental accompanied bya range of upper harmonics. Less work has been doneon understanding the nearly pure-tone cries of otherbirds. For many years there has been the supposition thatthe sound production mechanism in this case was quitedifferent, perhaps involving some sort of aerodynamicwhistle rather than a syringeal vibration. More recent ex-perimental observations on actual singing birds, using
PartF
19.6

796 Part F Biological and Medical Acoustics
modern technology [19.39], have established howeverthat, at least in the cases studied, the syringeal valve is infact normally active, though it does not close completelyin any part of the cycle, thus avoiding the generation oflarge amplitudes of upper harmonics. Suppression of up-per harmonics can also be aided by filtering in the uppervocal tract [19.40].
In the case of doves, which produce a brief pure-tone“coo” sound at a single frequency, the explanation ap-pears to lie in the use of a thin-walled inflated esophagealsac and a closed beak, with fine tuning provided by anesophageal constriction [19.41]. The volume V of airenclosed in the sac provides an acoustic complianceC = V/ρc2 that is in parallel with an acoustic inertanceL = m/S2 provided by the mass m and surface area Sof the sac walls. The resonance frequency f of this sacfilter is given by
f = 1
2π
(ρc2S2
mV
)1/2
, (19.5)
where ρ is the density of air and c is the speed of soundin air. When excited at this frequency by an inflow ofair from the trachea, the very thin expanded walls ofthe sac vibrate and radiate sound to the surrounding air.For a typical dove using this strategy, the wall-mass anddimensions of the inflated sac are about right to couple tothe “coo” frequency of about 900 Hz. From (19.5), theresonance frequency varies only as the square root ofthe diameter of the sac, so that a moderate exhalation ofbreath can be accommodated without much disturbanceto the resonance. The dove must, however, learn to adjustthe glottal constriction to couple the tracheal resonanceefficiently to that of the sac.
Some other birds, such as the Cardinal, that producenearly pure-tone calls over a wide frequency range, ap-pear to do so with the help of an inflated sac in theupper vocal tract that leads to the opened beak, with thetracheal length, sac volume, glottal constriction, tongueposition, and beak opening all contributing to determinethe variable resonance frequency of the filter. Becausethe sac is not exposed as in the dove, its walls areheavy and do not vibrate significantly. It thus acts asa Helmholtz resonator, excited by the input flow from thetrachea and vented through the beak. The bird presum-ably learns to adjust the anatomical variables mentionedabove to the syringeal vibration frequency, which is inturn controlled by syringeal membrane tension, and canthen produce a nearly pure-tone song over quite a largefrequency range. Despite this explanation of the mech-anism of pure-tone generation in some cases, others havestill to be understood, for the variety of birdsong is sogreat that variant anatomies and vocalization skills maywell have evolved.
With most of the basic acoustic principles of bird-song understood, most of the interest in birdsongcenters upon the individual differences between species.The variety found in nature is extremely great and,while sometimes correlated with large variations in birdanatomy, it also has many environmental influences.Some birds, surprisingly, have songs with prominentformant bands extending well into the ultrasonic region,despite the fact that behavioral studies and even audi-tory brainstem measurements show that they have noresponse above about 8 kHz [19.31, 42]. The formantbands in these cases are therefore presumably just anincidental product of the vocalization mechanism.
19.7 Bats
Since human hearing, even in young people, is lim-ited to the range from about 20 Hz to about 20 kHz,frequencies lying outside this range are referred to aseither infrasonic or ultrasonic. Very large animals suchas elephants may produce sounds with appreciable in-frasonic components, though the higher harmonics ofthese sounds are quite audible. Small animals such asbats, however, produce echo-location calls with dom-inant frequencies around 80 kHz that are inaudible tohumans, though some associated components of lowerfrequency may be heard. In this section brief atten-tion will be given to the sonar abilities of bats, thoughsome other animals also make use of ultrasonic tech-niques [19.43].
Sound waves are scattered by any inhomogeneitiesin the medium through which they are propagating, thedensity of an animal body in air provides a large contrastin acoustic impedance and therefore a large scatteredsignal. The basic physics shows that, for a target in theform of a sphere of diameter d and a signal of wavelengthλ � d, the echo strength is proportional to d6/λ4 timesthe incident intensity. This incident intensity is itselfdetermined by the initial signal power and the angularwidth of the scanning signal, which varies about as λ/a,where a is the radius of the mouth of the probing animal.If R is the distance between the probing animal and thetarget, then the sound power incident on the target variesas a2/λ2 R2 and the returned echo strength E thus varies
PartF
19.7

Animal Bioacoustics 19.8 Aquatic Animals 797
as
E ∝ d6a2
λ6 R4 , (19.6)
provided the wavelength λ is much greater than thediameter d of the scattering object and the radius a ofthe mouth. Another factor must, however, be added tothis equation and that is the attenuation of the sound dueto atmospheric absorption. This attenuation depends onrelative humidity, but is about 0.1 dB m−1 at 10 kHz, in-creasing to about 0.3 dB m−1 at 100 kHz, and so is nota very significant factor at the short ranges involved.
Once the size of the target becomes comparablewith the incident sound wavelength, the scattering tendstowards becoming reflection and geometrical-opticstechniques can be used. In this limit, the reflected inten-sity is proportional to the area of the target, but dependsin a complicated way upon its shape and orientation. Fi-nally, if a pure-tone sound is used, any Doppler shift inthe frequency of the echo can give information aboutthe relative motion of prey and predator. The reflectedsound can therefore give information about the natureof the target and its motion, both of which are importantto the pursuing bat.
The sonar-location cries of bats and other animalsare, however, not pure-tone continuous signals but rathersound pulses with a typical frequency in the range40–80 kHz and so a wavelength of about 4–8 mm. Thiswavelength is comparable to the size of typical prey in-sects so that the echo can give information about size,shape and wing motion, while the echo delay revealsthe distance. The bat’s large ears are also quite direc-tional at these frequencies, so that further informationon location is obtained. Rather than using short burstsof pure tone, some predators use longer bursts in whichthe frequency is swept rapidly through a range of several
kilohertz. This technique is known as “chirping”, and itallows the returned echo to be reconstructed as a sin-gle pulse by frequency-dependent time delay, althoughanimal neural systems may not actually do this. The ad-vantage of chirping is that the total energy contained inthe probing pulse, and thus the echo, can be made muchlarger without requiring a large peak power.
Because of the high frequencies involved in suchsonar detection, bats have a hearing system that isspecialized to cover this high-frequency range and toprovide extended frequency resolution near the signalfrequency, perhaps to aid in the neural equivalent of “de-chirping” the signal and detecting Doppler frequencyshifts. The auditory sensitivity curve of bats is similarin shape to that of humans (threshold about 20 µPa), butshifted up in frequency by a factor of about 20 to givehigh sensitivity in the range 10–100 kHz [19.1]. Thethreshold curve generally shows a particular sensitiv-ity maximum near the frequency of the echo-locationcall, as might be expected. Bats also generally haveforward-facing ears that are large in comparison withtheir body size. The functions of these in terms ofincreased directionality and larger receiving area areclear [19.30].
Sound production in bats is generally similar tothat in other animals, but with the system dimensionstailored to the higher frequencies involved, and oftenwith the sound emitted through the nose rather than themouth. The complicated geometry of the nasal tract,which has several spaced enlargements along its length,appears to act as an acoustic filter which suppressesthe fundamental and third harmonic of the emittedsound while reinforcing the second harmonic, at leastin some species [19.44]. The physics of this arrange-ment is very similar to that of matching stubs applied tohigh-frequency transmission lines.
19.8 Aquatic Animals
The generation and propagation of sound under water, asdiscussed in Chap. 19, have many features that are differ-ent from those applying to sound in air. From a physicalpoint of view, a major difference is the fact that wa-ter is often quite shallow compared with the range ofsound, so that propagation tends to be two-dimensionalat long distances. From the present biological viewpointthe major difference is that the acoustic impedance ofbiological tissue is nearly equal to that of the surround-ing water, while in air these differ by a factor of about
3500. This leads to some very significant differences inthe auditory anatomy and behavior between aquatic andair-dwelling animals.
The variety of aquatic animal species is compara-ble to that of land-dwelling animals, and they can bedivided into three main categories for the purposes ofthe present chapter. First come the crustaceans, such asshrimp, lobsters and crabs, which are analogous to in-sects, then the wide variety of fish with backbones, andfinally the air-breathing aquatic mammals such as the
PartF
19.8

798 Part F Biological and Medical Acoustics
cetaceans (whales, dolphins and porpoises, which arethe subject of Chap. 19), though animals such as tur-tles also come into this category. There are, of course,many other categories of marine animal life, but theyare not generally significant from an acoustic point ofview. A good review has been given by Hawkins andMyrberg [19.45].
The crustaceans, like most insects, generally pro-duce sound by rubbing a toothed leg-file against one ofthe plates covering their body, thus producing a pulseof rhythmic clicks. Some animals, such as shrimp, mayproduce a single loud click or pop by snapping theirclaws in much the same way that a human can do withfingers. Because this activity takes place under water,which has density ρ about 800 times greater and soundvelocity c about 4.4 times greater than that of air, andthus a specific acoustic impedance ρc about 3500 timesgreater than air, the displacement amplitude of the vibra-tion does not need to be large, and the vibrating structureis generally small and stiff. The peak radiated acousticpower in the “click” can, however, be very large – asmuch as several watts in the Pistol shrimp Alpheidae –probably from a mechanism involving acoustic cavita-tion. The click lasts for only a very short time, however,so that the total radiated energy is small.
Fish species that lack an air-filled “swim-bladder”,the main purpose of which is to provide buoyancy, mustproduce sound in a similar manner. For fish that do havea swim-bladder, however, the sound production processis much more like that of the cicada, with some sort ofplate or membrane over the bladder, or even the bladderwall itself, being set into oscillation by muscular effortand its displacement being aided by the compressibilityof the air contained in the bladder. The surrounding tis-sue and water provide a very substantial mass loadingwhich also contributes to determining the primary res-onance frequency of the bladder. This is a much moreefficient sound production process than that of the crus-taceans and leads to much louder sounds, again generallyconsisting of a train of repetitive pulses at a frequencytypically in the range 100–1000 Hz.
When it comes to sound detection, hair cells againcome into play in a variety of ways. Because the dens-ity of the animal body is very similar to that of thesurrounding water, a plane wave of sound tends to sim-ply move the animal and the water in just the sameway. The slight difference in density, however, doesallow for some differential motion. The animal bodyis, however, relatively rigid, so that its response to di-verging waves in the near field is rather different fromthat of the liquid. Any such relative motion between
the body and the surrounding water can be detectedby light structures such as hairs protruding from thebody of the animal, and these can form the basis ofhair-cell acoustic detectors. Even more than this, sincesuch cells are generally sensitive to hair deflection injust one direction, arrays of hair cells can be structuredso as to give information about the direction of ori-gin of the sound. Although some such detector hairsmay be mechanically strong and protrude from the bodyof the animal, others may be very small and delicateand may be protected from damage by being locatedin trench-like structures, these structures being calledlateral-line organs. Their geometry also has an effect onsound localization sensitivity.
There is another type of hair detector that respondsto acceleration rather than relative displacement and thattherefore takes advantage of the fact that the body of theanimal tends to follow the acoustic displacement of thesurrounding water. This is the otolith, which consistsof a small dense calcareous stone supported by one ormore hair cells,as shown in Fig. 19.9. Since the motionof this stone tends to lag behind the motion of the li-quid, and thus of its supports, the supporting hairs aredeflected in synchrony with the acoustic stimulus, sothat it can be detected by the cells to which they areattached. These sensors will normally have evolved sothat combined mass of the otolith and stiffness of thehair give a resonance frequency in the range of interestto the animal, and detection sensitivity will be greatestat this frequency.
If the fish possesses an air-filled swim-bladder,then this can also be incorporated in the hearing sys-
a) b)
HairCompliantsensorycells
Liquidmedium
Mineralgrain
Liquidmedium
Sensory hair
Resilient substrateResiliant supporting tissue
Mineralgrain
Fig. 19.9a,b Two possible forms for a simple otolith de-tector: (a) a single-cell detector, (b) a multi-cell detector. Asthe mineral grain moves sideways relative to the substrate,the sensory hairs are deflected and open ion channels in thesupporting transducer cells (from [19.9])
PartF
19.8

Animal Bioacoustics 19.10 Quantitative System Analysis 799
tem [19.46]. An air bubble in water is made to move ina sound wave by the differential pressure across it. Be-cause its mass is small and the pressure gradient is thesame as that on an equivalent volume of water, the bub-ble tends to move more than the surrounding liquid but,in order to do so, it must displace a significant amountof this liquid. The final result is that the amplitude offree bubble motion is about three times the amplitudeof the motion of the surrounding liquid. Since the bodyof the fish tends to follow the liquid motion because itsdensity is nearly the same, there is relative motion be-tween the bladder and the rest of the fish, provided it
is not rigidly enclosed. This relative motion can be de-tected by neural cells pressed against the bladder walland provides an efficient sensor of underwater sound.The radial compressive resonances of the swim blad-der can also be important in the detection of sound and,since these are also involved in sound production in thesefish, there is a good match between call frequency andthe frequency of maximum hearing sensitivity, whichtypically lies in the range 100 to 1000 Hz. Fish withswim bladders have thus evolved to use these primarilybuoyancy-regulating structures for both the productionand detection of sound.
19.9 Generalities
This brief survey has shown the strong resemblancebetween the basic sound-producing and auditory mech-anisms in a wide variety of animals. Certainly there isa distinction in the matter of sound production betweenthose animals that store air within their bodies and thosethat do not, and a rather similar distinction in the matterof sound detection, but the similarities are more strikingthan the differences. In particular, the universal impor-tance of hair-cells in effecting the transduction fromacoustic to neural information is most striking.
Also notable in its generality is the scaling ofthe dominant frequency of produced sound and the
associated frequency of greatest hearing sensitivity ap-proximately inversely with the linear dimensions of theanimal involved. Certainly there are notable outliers inthis scaling, but that in itself is a clue to the signifi-cantly different acoustic behavior of the animal speciesconcerned.
Fortunately, quite straightforward acoustic analysisprovides a good semi-quantitative description of theoperation of most of these animal acoustic systems,and in some cases such analysis can reveal evolution-arily optimized solutions to modern acoustical designproblems.
19.10 Quantitative System Analysis
Biological systems are almost always anatomically com-plex, and this is certainly true of vocal and auditorysystems, which typically comprise sets of interconnect-ing tubes, horns, cavities and membranes driven overa wide frequency range by some sort of internal or ex-ternal excitation. While a qualitative description of theway in which such a system works can be helpful, thismust be largely based upon conjectures unless one isable to produce a quantitative model for its behavior.Fortunately a method has been developed for the con-struction of detailed analytical models for such systemsfrom which their acoustic behavior can be quantitativelypredicted, thus allowing detailed comparison with exper-iment. This section will outline how this can be done,more detail being given in [19.9] and [19.20].
In a simple mechanical system consisting of massesand springs, the quantities of interest are the force Fi
applied at point i and the resulting velocity of motion v jat point j, and we can define the mechanical impedanceZmech by the equation Zmech
jj = Fj/v j . Note that thesubscripts on F and v are here both the same, so thatZmech
jj is the ratio of these two quantities measured ata single point j. It is also possible to define a quantityZmech
ij = Fi/v j which is called the transfer impedancebetween the two points i and j. There is an importanttheorem called the reciprocity theorem, which showsthat Z ji = Zij .
In such a simple mechanical system, as well as themasses and springs, there is normally some sort of lossmechanism, usually associated with internal viscous-type losses in the springs, and the situation of interestinvolves the application of an oscillating force of mag-nitude F and angular frequency ω. We denote this forcein complex notation as F eiωt where i = √−1. (Note
PartF
19.1
0

800 Part F Biological and Medical Acoustics
that, in the interest of consistency throughout this Hand-book, this notation differs from the standard electricalengineering notation in which i is replaced by j.) For themotion of a simple mass m under the influence of a forceF we know that F = m dv/dt or F = iωmv, so that theimpedance provided by the mass is iωm. Similarly, fora spring of compliance C, F = ∫
vdt/C = −i/(ωC), giv-ing an impedance −i/(ωC). For a viscous loss within thespring there is an equivalent resistance R proportionalto the speed of motion, so that F = Rv. Examinationof these equations shows that they are closely similar tothose for electric circuits if we assume that voltage is theelectrical analog of force and current the analog of veloc-ity. The analog of a mass is thus an inductance of magni-tude m, the analog of a compliant spring is a capacitanceC, and the analog of a viscous resistance is an electricalresistance R. A frictional resistance is much more com-plicated to model since its magnitude is constant oncesliding occurs but changes direction with the directionof motion, so that its whole behavior is nonlinear.
These mechanical elements can then be combinedinto a simple circuit, two examples being shown inFig. 19.10. In example (a) it can be seen that the mo-tion of the mass, the top of the spring, and the viscousdrag are all the same, so that in the electrical analog thesame current must flow through each, implying a sim-ple series circuit as in (b). The total input impedance istherefore the sum of the three component impedances,so that
Zmech = R + iωm − i
ωC= R + im
ω
(ω2 − 1
mC
),
(19.7)
which has an impedance minimum, and thus maximummotion, at the resonance frequency ω∗ = 1/(mC)1/2. Inexample (c), the displacement of the top of the spring isthe sum of the compressive displacement of the springand the motion of the suspended mass, and so the analogcurrent is split between the spring on the one hand andthe mass on the other, the viscous drag having the samemotion as the spring, leading to the parallel resonantcircuit shown in (d). There is an impedance maximum,and thus minimum motion of the top of the spring, at theresonance frequency, which is again ω∗ = 1/(mC)1/2.In a simple variant of these models, the spring could beundamped and the mass immersed in a viscous fluid, inwhich case the resistance R would be in series with theinductance rather than the capacitance. These analogscan be extended to include things such as levers, whichappear as electrical transformers with turns ratio equalto the length ratio of the lever arms.
a) Force
Mass
Spring Viscousdrag
c) Force
Spring Viscousdrag
Mass
b)
d)
Force
Force
Mass
Mass
Spring Drag
Spring Drag
Fig. 19.10 (a) A simple resonant assembly with an oscil-lating force applied to a mass that is resting on a rigidlysupported spring, the spring having internal viscous losses.(b) Analog electric network for the system shown in (a).(c) An alternative assembly with the mass being freelysuspended from the spring and the oscillating force be-ing applied to the free end of the spring. (d) Analog electricnetwork for the system shown in (c). (Note the potentialsource of confusion in that an electrical inductance symbollooks like a physical spring but actually represents a mass)
While such combinations of mechanical elementsare important in some aspects of animal acoustics, suchas the motion of otolith detectors, most of the systems ofinterest involve the generation and detection of acousticwaves rather than of mechanical vibrations. The impor-tant physical variables are then the acoustic pressure pand the acoustic volume flow U , both being functions ofthe frequency ω. By analogy with mechanical systems,the acoustic impedance is now defined as Zacoust = p/U .For a system with a well-defined measurement apertureof area S, it is clear that p = F/S and U = vS, so thatZacoust = Zmech/S2, and once again we can define boththe impedance at an aperture and the transfer impedancebetween two apertures. In what follows, the superscript“acoust” will be omitted for simplicity.
Consider first the case of a circular diaphragm un-der elastic tension and excited by an acoustic pressurepeiωt on one side. This problem can easily be solvedusing a simple differential equation [19.9], but here weseek a network analog. The pressure will deflect the dia-
PartF
19.1
0

Animal Bioacoustics 19.10 Quantitative System Analysis 801
phragm into a nearly spherical-cap shape, displacing anair volume as it does so. If the small mass of the deflectedair is neglected, then deflection of the diaphragm will beopposed by its own mass inertia, by the tension force andby internal losses. The mass contributes an acoustic in-ertance (or inductance in the network analog) with mag-nitude about 2ρsd/S, where ρs is the density of the mem-brane material, d is the membrane thickness, and S is itsarea, while the tension force T contributes an equivalentcapacitance of magnitude about 2S2/T . This predictsa resonance frequency ω∗ ≈ 0.5(T/Sρsd)1/2, while therigorously derived frequency for the first mode of the di-aphragm replaces the 0.5 with 0.38. Because biologicalmembranes are not uniform in thickness and are usuallyloaded by neural transducers, however, it is not appropri-ate to worry unduly about the exact values of numericalfactors. For a membrane there are also higher modeswith nodal diameters and nodal circles, but these are ofalmost negligible importance in biological systems.
The next thing to consider is the behavior of cav-ities, apertures, and short tubes. The air enclosed ina rigid container of volume V can be compressed bythe addition of a further small volume dV of air and thepressure will then rise by an amount p0γ dV/V wherep0 is atmospheric pressure and γ = 1.4 is the ratio ofspecific heats of air at constant pressure and constantvolume. The electric analog for this case is a capaci-tance of value γ p0/V = ρc2/V where c is the speed ofsound in air and ρ is the density of air.
In the case of a tube of length l and cross-section S,both very much less than the wavelength of the sound,the air within the tube behaves like a mass ρlS that is setinto motion by the pressure difference p across it. Theacoustic inertance, or analog inductance, is then Z =ρl/S. For a very short tube, such as a simple aperture, themotion induced in the air just outside the two ends mustbe considered as well, and this adds an “end-correction”of 0.6–0.8 times the tube radius [19.47] or about 0.4S1/2
to each end of the tube, thus increasing its effectivelength by twice this amount.
These elements can be combined simply by consid-ering the fact that acoustic flow must be continuous andconserved. Thus a Helmholtz resonator, which consistsof a rigid enclosure with a simple aperture, is modeledas a capacitor and an inductor in series, with some re-sistance added due to the viscosity of the air movingthrough the aperture and to a less extent to radiation re-sistance. The analog circuit is thus just as in Fig. 19.10band leads to a simple resonance.
If any of the components in the system under analysisis not negligibly small compared with the wavelength of
a)
U1 p1
Sp2 U2
I
p1 p2U1 U2Zij
b)
Fig. 19.11 (a) A simple uniform tube showing the acousticpressures pi and acoustic volume flows Ui . (b) The electri-cal analog impedance element Zij . Note that in both casesthe current flow has been assumed to be antisymmetricrather than symmetric
the sound involved, then it is necessary to use a morecomplex analysis. For the case of a uniform tube oflength l and cross section S, the pressure and flow at oneend can be denoted by p1 and U1 respectively and thoseat the other end by p2 and U2. The analog impedanceis then a four-terminal element, as shown in Fig. 19.11.The equations describing the behavior of this elementare
p1 = Z11U1 − Z12U2 ,
p2 = Z21U1 − Z22U2 . (19.8)
Note that the acoustic flow is taken to be inwards atthe first aperture and outwards at the second, and thisasymmetry gives rise to the minus signs in (19.8). Sometexts take both currents to be inflowing, which removesthe minus signs. For a simple uniform tube, symmetrydemands that Z21 = Z12 and that Z22 = Z11. The firstof these relations, known as reciprocity, is universal anddoes not depend upon symmetry, while the second is nottrue for asymmetric tubes or horns.
For a uniform tube of length l and cross-section S,consideration of wave propagation between the two endsshows that
Z11 = Z22 = −iZ0 cot kl ,
Z21 = Z12 = −iZ0 csc kl , (19.9)
where Z0 = ρc/S is the characteristic impedance of thetube. The propagation number k is given by
k = ω
c− iα (19.10)
PartF
19.1
0

802 Part F Biological and Medical Acoustics
where α represents the attenuation caused by viscous andthermal losses to the tube walls, and has the approximatevalue
α ≈ 10−5 ω1/2
a(19.11)
where a is the tube radius. Since auditory systems ofteninvolve quite narrow tubes, this term can become veryimportant.
Similar but much more complicated relations applyfor horns of various shapes, the simplest being conical,exponential or parabolic in profile [19.9]. As discussedelsewhere [19.47], horns act as acoustic transformers,basically because Z22 �= Z11, and can raise the acousticpressure in the narrow throat by about the ratio of themouth diameter to the throat diameter. This amplifica-tion is limited, however, to frequencies high enough thatthe horn diameter does not change greatly over an axialdistance of about one wavelength.
With the aid of these electric circuit element analogsit is now possible to construct an analog network torepresent the whole acoustic system, as shown by theexample in Fig. 19.2. The major guiding principle in con-structing such a network is the conservation of acousticflow, or equivalently of electric current. In the case ofan auditory system, there may be several openings con-necting to the environment, and the acoustic pressuresat these openings will generally differ in both phase andamplitude, depending upon the direction from which thesound is coming. Phase differences are generally moreimportant for directional discrimination than are ampli-tude differences, particularly for small animals, just asin directional microphones, [19.47] and the combinationof tubes, cavities and membranes in the system providesadditional phase shifts. The sensory input is normallygenerated by the motion of tympanic membranes on thetwo sides of the animal, with the combination of exter-nal and internal pressure determining the motion of eachmembrane, as shown for example in Figs. 19.7 and 19.8.
When sound production is considered, it is usual tomake the approximation of separating the basic sound-generation mechanism, such as the air flow throughvibrating vocal folds, from the acoustics of the subse-quent tubes and cavities, thus leading to a “source/filter
model”. With this simplification, the source can beassumed to produce an oscillating acoustic flow at a par-ticular frequency ω, generally accompanied by a set ofharmonics at frequencies nω generated by nonlinearityin the vibration of the flow valve. The sound productionat each frequency is then determined by the final acousticflow U(nω) through an aperture into the surroundings.The square of this flow, multiplied the acoustic radia-tion resistance of the aperture, which depends upon itssize, [19.47] then determines the radiated acoustic powerat that frequency. In a much more complex model, thepressure generated by the acoustic input flow can be rec-ognized to act back upon the acoustic source itself, thusmodifying its behavior. Typically this results in a smallshift in the source frequency to align it more closely witha neighboring strong resonance of the filter. Such inter-actions are well known in other systems such as musicalwind instruments and probably assist in coupling the os-cillations of the syrinx to the resonance of the vocal filterin “pure tone” birdsong.
Finally, it is worthwhile to emphasize that biolog-ical acoustic systems do not consist of straight tubesof uniform diameter with rigid walls, unloaded cir-cular membranes, or other idealized elements. Whileit is possible in principle to include such refinementsin a computational model, this will generally makethat model so complex to analyze that it reveals lit-tle about the actual operation of the system. It isusually better, therefore, to construct the simplest pos-sible model that includes all the relevant acousticelements and to examine its predictions and the ef-fect that changing the dimensions of some of thoseelements has on the overall behavior. In this way thebehavior of the real biological system can be largelyunderstood.
RemarkThe number of books and papers published in this fieldis very large, so that the reference list below is a rathereclectic selection. Generally descriptive and behavioralreferences have not been included, and the list concen-trates on those that apply physical and mathematicalanalysis to bioacoustic systems.
References
19.1 W.C. Stebbins: The Acoustic Sense of Animals (Har-vard Univ. Press, Cambridge 1983)
19.2 J.W. Bradbury, S.L. Vehrenkamp: Principles ofAnimal Communication (Sinauer, Sunderland1998)
19.3 R.-G. Busnel (Ed.): Acoustic Behavior of Animals(Elsevier, New York 1963)
19.4 A.N. Popper, R.R. Fay (Eds.): Comparative Studies ofHearing in Vertebrates (Springer, Berlin, New York1980)
PartF
19

Animal Bioacoustics References 803
19.5 B. Lewis (Ed.): Bioacoustics: A Comparative Ap-proach (Academic, London 1983)
19.6 D.B. Webster, R.R. Fay, A.N. Popper (Eds.): The Evo-lutionary Biology of Hearing (Springer, Berlin, NewYork 1992)
19.7 R.R. Fay, A.N. Popper (Eds.): Comparative Hearing:Mammals (Springer, Berlin, New York 1994)
19.8 R.R. Hoy, A.N. Popper, R.R. Fay (Eds.): ComparativeHearing: Insects (Springer, Berlin, New York 1998)
19.9 N.H. Fletcher: Acoustic Systems in Biology (OxfordUniv. Press, New York 1992)
19.10 D.A.W. Thompson: On Growth and Form (abridged),2nd edn., ed. by J.T. Bonner (Cambridge Univ.Press, Cambridge 1961)
19.11 G.B. West, J.H. Brown: Life’s universal scaling laws,Phys. Today 57(9), 36–42 (2004)
19.12 N.H. Fletcher: A simple frequency-scaling rule foranimal communication, J. Acoust. Soc. Am. 115,2334–2338 (2004)
19.13 M. Garstang, D. Larom, R.Raspet, M. Lindeque: At-mospheric controls on elephant communication,J. Exper. Biol. 198, 939–951 (1995)
19.14 K. McComb, D. Reby, L. Baker, C. Moss, S. Sayialel:Long-distance communication of acoustic cues tosocial identity in African elephants, Anim. Behav.65, 317–329 (2003)
19.15 J.H. Brackenbury: Power capabilities of the aviansound-producing system, J. Exp. Biol. 78, 163–166(1979)
19.16 A.W. Ewing: Arthropod Bioacoustics: Neurobiologyand Behavior (Cornell Univ. Press, Ithaca 1989)
19.17 A. Michelsen, H. Nocke: Biophysical aspects ofsound communication in insects, Adv. Insect Phys-iol. 10, 247–296 (1974)
19.18 K. Kalmring, N. Elsner (Eds.): Acoustic and Vibra-tional Communication in Insects (Parey, Berlin,Hamburg 1985)
19.19 N.H. Fletcher: Acoustical response of hair receptorsin insects, J. Comp. Physiol. 127, 185–189 (1978)
19.20 N.H. Fletcher, S. Thwaites: Physical models for theanalysis of acoustical systems in biology, Quart.Rev. Biophys. 12(1), 25–65 (1979)
19.21 H.C. Bennet-Clark: Resonators in insect soundproduction: how insects produce loud pure-tonesongs, J. Exp. Biol. 202, 3347–3357 (1999)
19.22 B. Dumortier: Morphology of sound emission ap-paratus in arthropoda. In: Acoustic Behaviour ofAnimals, ed. by R.-G. Busnel (Elsevier, Amsterdam1963) pp. 277–345
19.23 B. Dumortier: The physical characteristics of soundemission in arthropoda. In: Acoustic Behaviour ofAnimals, ed. by R.-G. Busnel (Elsevier, Amsterdam1963) pp. 346–373
19.24 A.G. Daws, H.C. Bennet-Clark, N.H. Fletcher: Themechanism of tuning of the mole cricket singingburrow, Bioacoust. 7, 81–117 (1996)
19.25 K. Ishizaka, J.L. Flanagan: Synthesis of voicedsounds from a two-mass model of the vocal cords,Bell Syst. Tech. J. 51(6), 1233–1268 (1972)
19.26 N.H. Fletcher: Bird song – a quantitative acousticmodel, J. Theor. Biol. 135, 455–481 (1988)
19.27 H.L.F. Helmholtz: On the Sensations of Tone asa Physiological Basis for the Theory of Music (Dover,New York 1954), trans. A.J. Ellis
19.28 G. von Bekesy: Experiments in Hearing (McGraw-Hill, New York 1960)
19.29 E.R. Lewis, E.L. Leverenz, W.S. Bialek: The Verte-brate Inner Ear (CRC, Boca Raton 1985)
19.30 N.H. Fletcher, S. Thwaites: Obliquely truncatedsimple horns: idealized models for vertebrate pin-nae, Acustica 65, 194–204 (1988)
19.31 P.M. Narins, A.S. Feng, W. Lin, H.-U. Schnitzler,A. Densinger, R.A. Suthers, C.-H. Xu: Old world frogand bird vocalizations contain prominent ultra-sonic harmonics, J. Acoust. Soc. Am. 115, 910–913(2004)
19.32 C.H. Greenewalt: Bird Song: Acoustics and Physiol-ogy (Smithsonian Inst. Press, Washington 1968)
19.33 D.E. Kroodsma, E.H. Miller (Eds.): Acoustic Com-munication in Birds, Vol. 1-2 (Academic, New York1982)
19.34 N.H. Fletcher, A. Tarnopolsky: Acoustics of the avianvocal tract, J. Acoust. Soc. Am. 105, 35–49 (1999)
19.35 F. Goller, O.N. Larsen: A new mechanism of soundgeneration in songbirds, Proc. Nat. Acad. Sci. U.S.A.94, 14787–14791 (1997)
19.36 G.B. Mindlin, T.J. Gardner, F. Goller, R.A. Suthers:Experimental support for a model of birdsong pro-duction, Phys. Rev. E 68, 041908 (2003)
19.37 D.K. Patterson, I.M. Pepperberg: A comparativestudy of human and parrot phonation: Acousticand articulatory correlates of vowels, J. Acoust. Soc.Am. 96, 634–648 (1994)
19.38 G.J.L. Beckers, B.S. Nelson, R.A. Suthers: Vocal-tract filtering by lingual articulation in a parrot,Current Biol. 14, 1592–1597 (2004)
19.39 O.N. Larsen, F. Goller: Role of syringeal vibrationsin bird vocalizations, Proc. R. Soc. London B 266,1609–1615 (1999)
19.40 G.J.L. Beckers, R.A. Suthers, C. ten Cate: Pure-tonebirdsong by resonant filtering of harmonic over-tones, Proc. Nat. Acad. Sci. U.S.A. 100, 7372–7376(2003)
19.41 N.H. Fletcher, T. Riede, G.A. Beckers, R.A. Suthers:Vocal tract filtering and the "coo" of doves,J. Acoust. Soc. Am. 116, 3750–3756 (2004)
19.42 C. Pytte, M.S. Ficken, A. Moiseff: Ultrasonic singingby the blue-throated hummingbird: A compari-son between production and perception, J. Comp.Physiol. A 190, 665–673 (2004)
19.43 G. Sales, D. Pye: Ultrasonic Communication in An-imals (Chapman Hall, London 1974)
PartF
19

804 Part F Biological and Medical Acoustics
19.44 D.J. Hartley, R.A. Suthers: The acoustics of the vocaltract in the horseshoe bat, Rhinolophus hilde-brandti, J. Acoust. Soc. Am. 84, 1201–1213 (1988)
19.45 A.D. Hawkins, A.A. Myrberg: Hearing and soundcommunication under water. In: Bioacoustics:A Comparative Approach, ed. by B. Lewis (Aca-demic, London 1983) pp. 347–405
19.46 N.A.M. Schellart, A.N. Popper: Functional as-pects of the evolution of the auditory system inActinopterygian fish. In: The Evolutionary Biologyof Hearing, ed. by D.B. Webster, R.R. Fay, A.N. Pop-per (Springer, Berlin, New York 1992) pp. 295–322
19.47 T.D. Rossing, N.H. Fletcher: Principles of Vibrationand Sound (Springer, New York 2004), Chapts. 8–10
PartF
19