Embed Size (px)
Citation preview

TECHNISCHEMECHANIK, Band 18‚Hefi 2. (1998), 153-160
Manushipleingang: 16. September 1997
A New Method of Vibration Analysis of Elastic Systems, Based on
the Lagrange Equations of the First Kind
M. P. Yushkov, S. A. Zegzhda
The new method is offered for the vibration analysis of elastic systems, consisting of elements whose natural
frequencies and shapes are known. The equations, describing the conditions of constraint of the system’s ele—
ments with each other, are considered as holonomic constraints. It is shown, that the application of the
Lagrange equations ofthe first kind allows to find the natural frequencies and shapes of the system as a whole
from the natural frequencies and shapes of the system’s elements. The quasistatic account of the maximum
shapes of system elements natural oscillations enables to simplify essentially calculations by the method offe—
red. This method is most eflective to use for elastic systems, consisting of concentrated masses, rods, rings and
plates. These elements can be connected to each other rigidly or by means of linear springs. The method is
demonstrated on a specific example, allowing to show all its basic characteristics.
1 The New Method
In Figure 1 an elastic system, consisting of three homogeneous elastic straight rods and one linear compliance
6 = % is represented. It is supposed, that the rods lie in one plane, the system has small oscillations, the rod
1 executes longitudinal oscillations, while rods 2 and 3 execute bending oscillations.
Ld—bj
3 C_7
“hag 3‘
1W11
///////
////
2N
//
Figure 1. A Three~r0d One—spring System
From the principle of system releasability from constraints it follows, that the rod oscillations can be described
by
um = Emma mm 2 moo—1m6:1
1
y2(xz:’) Z XQ2C(I)X2„(X2)(1)
0:1
„(m = W) + [x3 333M) + Sesame)0:1

Here X25(x2) and X36(x3) are accordingly beam functions of consoles and free rod (Timoshenko, 1955; Ba-
bakov, 1965). The first two components in the expression for yg (x3,t) correspond to a movement of rod 3 as
absolutely rigid body. The value n is equal to displacement of the mass centre C of rod 3 lengthways along axis
y3, and (p is the angle of its turn. Let us also enter into consideration the displacement éof the mass centre C
of rod 3 along an axis x3 and we shall consider the quantities <2, 11, (p, qV6 (v : 1, 2, 3; G : 1, 2, as
generalized Lagrange coordinates. Let ö : O , then all constraints between the coordinates are holonomic and
are given by the following equations:
fi Z ’4(11J)—Y2(azvl) : quoXlo(Zl)— ZQZGXZG(a2) : 0
5:1 0:1
f2 I y2(l2’r)——E-Y : iq20X26(12)—EJ = 0
0:1
(2)
V l °°
f3 2 ‚Wüst-I) : n+(as“‘§)@+243cxsq(a3) : 0
o=l
. 814:);8x2
5+_.V_3ax = 26125X§502> + (P+ 2q30‘X3’0(a3) : 0
3 6:1 6:1
X2 :12 X3=ü3
The kinetic energy of the rods and the potential energy of their deformation can be expressed as (Timoshenko,
1955; Babakov, 1965)
m3 ä2+h2 2-2 „ „Q .2T z ( 2 ) + + Z EMvcyzqvc
v:1 6:1
" °° M (02 q2 mH: v6 vo VG M : _1
Ä 2 1“ 2
(3)
I 2m u M muXuo (h. )
MW 2 1—“ jX;G(x)dx _ 4
u 0
n:3 (5:1‚2‚... v:1,2‚3 14:2‚3
In these formulas the mm are the natural frequencies of the rods in the absence of constraints, and mV their
masses, Let us take advantage of the Lagrange equations of the first kind, written down in generalized coordi-
nates (Butenin and Fufaev, 1991).
k ‚ga_u 8L ZZABL„ _— ‚. L : T — H 4
d1 561p 361,; i=1 aqp ( )
154

Here k is the number of constraints, and (11, q2 ‚ , qp, are the generalized coordinates. Applying equations
(4) we obtain
1113132.. __ H l
"13€ 2 _A2 ms“ = A3 l—ZCP = A3[a3-—23-) + A4
Mio(éia+mizs€ho) Z A1X10(ll)
M26(ä26 +wäo‘q2cx) : _A1X26((l2)+A2X26(l2)+A4X§G(lz)
M3c(q3a+w%GQSo) : A3X3s(a3)+A4X§q(as)
The generalized reactions A1, A2, A3 are equal to forces of rod interaction in points of their junction with
each other, and A4 is equal to the interactive moment between rods 2 and 3. From the principle of releasability
from constraints it follows, that equations (5) can be considered also as the equations of dynamics of the sy-
stem's elements under the action of forces A1, A2, A3 and moment A4 applied to them from the constraints
and irrespective of whether they are rigid or elastic. This makes possible an application of the Lagrange equati—
ons of the first kind (4) from a case where there are rigid constraints to a case, when all or some constraints are
elastic. First it is necessary to consider all constraints as rigid and, to use them to write equations (4). Then it is
necessary to enter into the equations for elastic constraints, the reactions, appropriate to these constraints. In
the example considered an elastic constraint is the first one. The reaction A1 is equal to the force of a
stretching (compression) of the springs of compliance ö ‚ and if the spring is stretched then A1 > 0 . Therefo-
re from the first of the equations of system (2) there will come the equation
fl : quoXIGUl) “ 2612GX25ÜIZ) + A1ö = 0 (6)
6:1 6:1
Let us note, that if we multiply it with negative unity, i.e. to write it down as ff = — fi = 0, then the new
Lagrange multiplier A": will he, obviously, such, that A: : — A1. Hence, a quantity N15 will enter an equa-
tion f: = 0, also with a plus sign.
Thus, if the i-th constraint is elastic and its compliance is 6 ‚ that, by writing it down at first as holonomic, we
pass to an elastic constraint by an addition of the quantity Aiöi .
Let the elastic system considered oscillate with a given natural frequency p. Then reactions Ai and coordinates
qp can be written
Ai = Äicos(pt+oc) and qp = pcos(pt+ot) (7)
From here and from equations (5) there follows, that
~ A N A
ä Z 2" Tl : _ 32
m3]; m3];
ö _2 (arg/311psz4
l3 m3p2
c _ Xlo(ll)Al611c -fi (8)
Mlc(mlo_p )
~ ‘Xzo (a2 )Ä1 + X25 (12 )x2 + lec (12)Ä4
M26(('Oäö —p2)
~ _ X3G(a3)Ä3+X3lo‘(a3)Ä4
M3o(w§c_p2)
155

By substituting expressions (7) into the equations of constraints (2) and (6), and then the formulas (8), we ob-
tain
4 N
2(Xij(p2)Aj : O at] : 0ij i=1‚...‚ 4
.21
Here the index i corresponds to the number of constraint. From system (9) follows that the equation of fre—
quencies is
det[0tij (192)] = 0 (10)
It is expedient to represent the coefficients (xij as
(xii Z 5i + ßii + Yü
uüzßij+yü iij
Here Si is the compliance of i—th constraint in case it is elastic. The quantities [ii]- are inversely proportional
to p2 and can be called the factors of compliance of the inertia forces. In the case considered we have
B11 : B12 Z B13 = [314 = B23 = B24 3 0 ßij Z ßji
2 2
1 1+12a —l /2 /l
[322 Z — 2 B33 Z ——(’L‘# (11)
m3}?
ß _ _12(a3—l3/2) ß _ _ 12
34 1113132192 44 “13132122
Coefficients W = Yfi are the infinite sums of simple fractions.
Yn(p2) Z i X3701) + i X226(al)
521M16(m126 —p2) c=1M26(m%0 w P2)
Mp2) = —i—-XZG(“Z)XZG(’7> M122) —“ — 0
G=1M20‘((D%0‘ —p2)
2 _ _ N X2c:(az)X§c(lz)
>0 2
722(192) = ZXR—(lg) 723(19) = 0 (12>G=1M26((D%.G _1)2)
Y24(p2) Z i X26(12)ZX25(127) y33(p2) Z i X325(a3) 9
0=1M20((’025 _p~) o=1M3o<m§o _pfl)
Y34<P2)—
U=l M36601; —p2)
Mari WW +2 [we]6=1M20‘((’0%0‘ _p2) (5:1 M3661); _p2)
156

When 192 = O the values 7,; can be presented as
82H
6A,.aAj
Mm) Z(13)
Here H is the total potential energy of the system element deformations under action of the generalized reacti-
ons A]. To be convinced of the validity of formulas (13), we will return to expression (3) for the potential
energy of rod deformations and to the Lagrange equations (5). When the account of all shapes of systems ele-
ment natural oscillations is quasistatic, i.e. when 51W : O (v = 1, 2, 3; 6 = 1, 2, we then have
H _ 2 + 2
2 0-—1 MIC;le 0:1 MZGUJ'ZG
+ [A2X30(a3)+A4X35(a3)]
2 5:1 M3om§o
Using this expression and formulas (12), the validity of formulas (13) has been established. It is essential that
the potential energy of rod deformation can be written not only as infinite series (14), but also by finite expres—
sions.
Aäz1 H Z l M5 (x)dx
215151 “ 2O E„J„
1‘12111+Hz+1’13 H1: 11:2,3 (15)
Here E is Young's modulus, J is the moment of inertia of the rod cross section, and S is the cross section area.
The bending moments M2 (x) and M3 (x) are linear functions of the generalized reactions Al- . When calcula-
ting M3 (x) it is necessary to take into account that the force A3 and the moment A 4 ‚ applied to the third rod,
are counterbalanccd with its quasistatic deformation by forces of inertia of translatory and rotary motion. Using
formulas (13) and (15), we obtain
1 a3a2 3l —a
wo) = EIS + 3;] wo) = —2—(—2—i)1 1 2 2 6E2J2
7(0)*0 Mow—"5 <o>— ’312 14 ZEZJZ 722 315212
12 f (z)z30 Z 0 O 2 2 0 :
72.4 ) Y24( ) ZEZJZ Y33< ) E313
fs4(Z)l32 f44(Z)ls 12
734(0) Z ä.“ 744(0) = —"‘_‘ + ““ (16)
E313 E3J3 E2J2
‚ 1 112 132,2 z3+z4 3z5—z6
f33 Z — — — — +105 105 35 3 5
11 132 z2 2z3 3Z4 3Z5
=—-——+-———————+———
f3“ 210 35 2 3
13 3 4 a;
= ——z + 22 —z = —‘
f“ 35 z 13
157
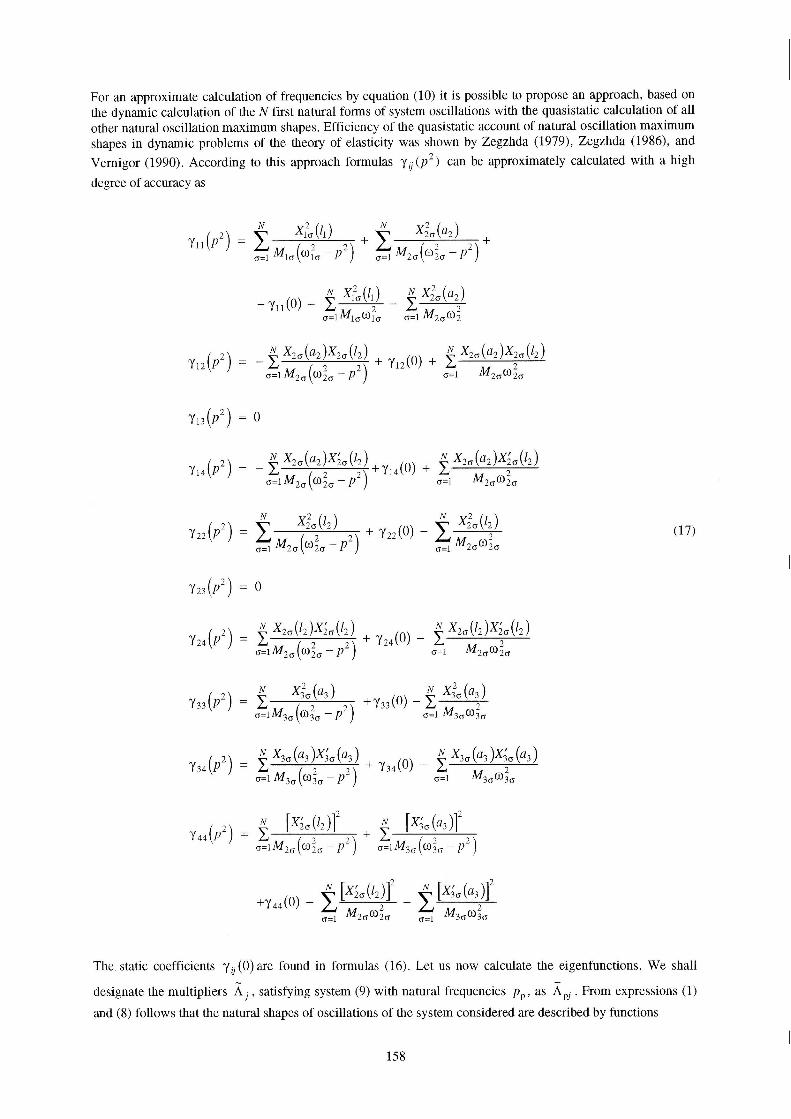
For an approximate calculation of frequencies by equation (10) it is possible to propose an approach, based on
the dynamic calculation of the N first natural forms of system oscillations with the quasistatic calculation of all
other natural oscillation maximum shapes. Efficiency of the quasistatic account of natural oscillation maximum
shapes in dynamic problems of the theory of elasticity was shown by Zegzhda (1979), Zegzhda (1986), and
Vernigor (1990). According to this approach formulas „(192) can be approximately calculated with a high
degree of accuracy as
new zgfifli—+2Ef#%fi+2 2
(5:1 16(0316 ) 6:]
We) - e—Xtow _ W2 2
6=1Mlcmlo (5:1M2Gw2
Y12(P2) = “ ä—X20(a2)xzc(l2) + Yum) + 12v;—’_X26(a2)X726(12)2 2 -
G=1M26(c02„ — p ) 6:1 M26m26
2 N X26(a2)X£6(l2) N X-6 (‘2)X£5(12)
= — ———+ 0 ————
MÜ) Emwgw)m“+§ wasCt
MW) 2 + mm) _(17)
vom?) = o
W) - 2212132?53) + W — 2323:3255)
W) ' :IMafciiag)pz> ”33“”
W — 25:53:21“)_ N [war N [Ja/(‚(61912
E1M26(0‘)56—p2)+ E1M3G(w%6‘p2)
N
+mm—fiW%H_2E&i2 2
M2Gm20' M3O‘CO3O‘6:1 6:1
The static coefficients YÜ-(O) are found in formulas (16). Let us now calculate the eigenfunctions. We shall
designate the multipliers Äj, satisfying system (9) with natural frequencies pp, as Äpj . From expressions (1)
and (8) follows that the natural shapes of oscillations of the system considered are described by functions
158

°° X1501 )Kpl
/ x = ————X x O S x S lItp( 1) gllwm(m126_pä) 1cs( 1) 1 1
m —X20’(a2)Äp1 +X20 (12 )sz +X£q (5)11“y x = X2(x) OSxZSlz (18)
A” Ä A%w„@ “2
”X Ä X’ Äyp30(3) = :2:.32£EEZ_£31;_32£E12_233%0(x3) 0 3 x3 S Q
5:1 M3C(w§6 _p§)
So we find the appearance of the natural shapes of oscillations of initially complex elastic system through natu—
ral shapes of its separate elements.
It is expedient to enter into consideration the functions ug’(x1) and (xp) (u = 2,3), describing the defor-
mation of the rods in a quasistatic mode under action of the generalized reactions A m . These functions can be
found in finite form by methods of resistance from the formulas (1) and (8) and can be supplied as infinite
series.
w X (1)Är! 16 1 pl
up (XI) El Mlowlzo 160(1) X1 1
m—X Ä X z Ä +X.’ z, Äyg;2(x2) Z Z 25((l2) p1+1:[c(2)2 p2 26(2) p4 X26(x2) O S x2 S l2
0:1 25‘025
m X Ä X’ Ä
3,3m) z ‘Mggw 0 5 XS S ,32
6:1 MSUCÜSG
From here and from expressions (18) there follows, that the required forms of oscillations can be presented as
c, °° X (UÄ p2up(x1) : ufflxl) + Z—Ml_1:12):012 X1591)
0'“ o' 0' p G
[—X2c (a2 p1 + XZG(12)ÄPZ + X£o(]2)1~\p4 ]p§
2 2 2
M26 (m20 —pp )(’Ü2cs
X2602) (19)‚Vp2(x'2) Z yguxi) + 2
6:1
°° X3 (a3)/~\ 3+X3’ (a3)1~\ 4 p2
nwnmmw+2[“ p “ Phxwa2 2 2
6:1 M3o'(co3o _pp)0‘)36
03x5; i:1‚2,3
2 Conclusion
The frequencies of longitudinal oscillations c016 grow as o, and frequencies of cross oscillations co26 and
eo“ as (52 . The values Xéa ([2) and X3’G (a3 )grow proportionally to <5 . Therefore the series which is included
in the first of formulas (l9) converges with l/ o4 ‚ and other two sums with 1/o7 . Such fast convergence of the
series is explained by an allocation of quasistatic shapes of deformation of the system's elements in solution
(19).
159
Literature
1. Babakov, I. M.: The Theory of Oscillations. Moskva: Science, (1965), 559 (in Russian).
2. Butenin, N. V.; Fufaev, N. A.: Introduction to Analytical Mechanics, Moskva; Science, (1991), 256 (in
Russian).
3. Timoshenko, S.: Vibration Problems in Engineering. Toronto, New York, London; D. van Nostrand,
(1955).
4. Vernigor, V. N.: Definition of Natural Frequencies and Equivalent Weights of an Elastic Body by its Dy—
namic Pliability. Vestnik of Leningrad University, Ser. 1., Issue 4, (1990).
5. Zegzhda, S. A: On a Problem of Striking of Deformable Bodies. Applied Mechanics. Issue 4. L., (1979), 91-
108 (in Russian).
6. Zegzhda, S. A.: Striking of Rings. Vestnik of Leningrad University. Ser. 1. (1986). Issue 1, 77-83 (in Rus-
sian).
Address: Professor MP. Yushkov, Professor S.A. Zegzhda, Faculty of Mathematics and Mechanics, St. Peters—
burg State University, Bibliotechnaya Square 2, Stary Peterhof, RUS-198904 Sankt—Petersburg
160





























