Embed Size (px)
Citation preview

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Multiagent planning and epistemic logic
Andreas HerzigIRIT, CNRS, Univ. Toulouse, France
Journee pleniere, preGDR sur les Aspects Formels et Algorithmiques de l’IA
July 5, 2017
1 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Outline
1 Planning: KR vs. ICAPS
2 What’s in a planning problem?
3 States and goals: Epistemic Logic
4 Actions and plans: Dynamic Epistemic Logic
2 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
KR vs. ICAPS: two diverging communities
ICAPS KR2002 — France —2004 — Canada —2006 — UK —2008 — Australia —2010 — Canada —2012 Brazil Italy2014 USA Austria2016 UK South Africa2018 NL USA
where should I publish my paper on action and planning?case
when (complex concepts∨complex models) then submit(KR);when (implemented∧fast) then submit(ICAPS)
esac
3 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
KR vs. ICAPS: reasons for the divergence
1 KR: focus on representationwhich language?
which concepts? (action, initial state, goal,. . . )which logical form? (arguments,. . . )has truth values? (facts do, actions don’t)
which models?theoretical properties of reasoning problems?
plan existence decidable?complexity of decision problems?
“logic is like a toothbrush”2 ICAPS: focus on fast reasoning methods
standardised representation languages (PDDL, PDDL+++,. . . )performance on benchmarks?
4 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
KR vs. ICAPS: soon back together?
since ∼2013: ‘planning goes multiagent’workshop ‘Distributed and Multi-Agent Planning’ @ ICAPS[Petrick, Geffner, Domshlak, Brafman, Kambhampati, Nebel,. . . ]
since ∼2011: ‘Dynamic Epistemic Logic goes planning’[Bolander, van der Hoek, Wooldridge, Aucher, Schwarzentruber,. . . ]
Dagstuhl workshops on multiagent epistemic planning(2008, 2014, 2017)⇒ many new representation problems⇒ in particular: reasoning about other agents’ mental states
fundamental in any kind of interactionpeople who are unable to attribute mental states to others havea lot of difficulties to interact with themcounts as a disorder, cf. autism, schizophrenia,. . .
5 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
The need for epistemic reasoning in planning1 single-agent planning
uncertainty about initial situationuncertainty about action effectssensing actions (alias knowledge producing actions)
⇒ contingent/conformant planning2 multiagent planning
initial situation:first-order: I don’t know whether p.second-order: I don’t know whether you know that p.second-order: I know that you don’t know whether p.. . .
goal:first-order: I want to know whether p.second-order: I want to know whether you know that p.second-order: I want you to believe that q.. . .
actions with epistemic effectssensing actionscommunication actionshow to model the agents’ perception of actions and events?
6 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
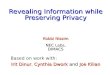
Challenge: robots with theory of mind [Milliez et al. 2014]
at step 3, agent Green’s beliefs become falsecolored arrows = beliefs about white book position (red = robot)colored spheres = reachability of an object for an agent
1. 2.
3. 4.
7 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Problems, problems
representation problems:simple integrations of epistemic and spatial reasoning?model ‘expiry date’ for knowledge/belief?
light in room x is on at Tj is in room x (so j believes that the light is on at T )j leaves the room at T+1at T ′ > T , does j still believe that the light in x is on?
higher-order belief revision?
⇒ to be solved in any application!reasoning problems:
epistemic reasoning is difficultat least PSPACEEXPTIME complete if common knowledge/belief involved
what are good benchmarks?“what is epistemic planning’s blocksworld?”
centralised or decentralised planning?
8 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Outline
1 Planning: KR vs. ICAPS
2 What’s in a planning problem?
3 States and goals: Epistemic Logic
4 Actions and plans: Dynamic Epistemic Logic
9 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
What’s in a planning problem?
planning problem = 〈init, goal, actionLaws〉
1 logical form of init: propositionproposition = set of possible worlds (states)can be described in various logical languages:
propositional logicepistemic logic. . .
classical planning:initial state = complete proposition
= a single possible world= a valuation of propositional logic
2 logical form of goal: proposition3 logical form of actionLaws: action type
action type: arm-raisingaction token: Bruno’s raising of his right arm in room 7 ofbuilding 007 of Caen IUT on July 5, 2017 at 10:55:55
10 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
What’s in an action?
“event brought about by an agent” [Davidson]
“proposition that can be phrased agent i sees to it thatproposition ϕ is true” [Belnap’s stit thesis]
“something that has precondition and effects” [AI folklore]
action = 〈precond, effect〉
precond = propositioneffect = ?
11 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
What’s in an action effect?STRIPS actions: effect = conjunction of literalshowever: an action type is instantiated in differentcircumstances⇒ effects typically depend on thesecircumstancesconditional effects:
effect ={〈condition1, L1,1 ∧ · · · ∧ L1,m1〉,
. . . ,
〈conditionn, Ln,1 ∧ · · · ∧ Ln,m1〉}
example: agent i’s action of flipping a switch
precond(flipi) = AtSwitchi
effect(flipi) = {〈¬On,On〉,
〈On, ¬On〉}
12 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Outline
1 Planning: KR vs. ICAPS
2 What’s in a planning problem?
3 States and goals: Epistemic Logic
4 Actions and plans: Dynamic Epistemic Logic
13 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Epistemic logic: language
knowledge explained in terms of possible worlds [Hintikka]:Kiϕ = “agent i knows that ϕ”
= ϕ true in every world that is possible for iBNF:
ϕ ::= p | ¬ϕ | ϕ ∧ ϕ | Kiϕ
where p ranges over Prp and i over Agt
3 possible epistemic attitudes w.r.t. a formula ϕ:KiϕKi¬ϕ¬Kiϕ ∧ ¬Ki¬ϕ
14 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Epistemic logic: possible worlds semantics
model M = (W , {Ri}i∈Agt,V) withW non-empty set of possible worldsRi ⊆ W ×W accessibility relationsV : W −→ 2Prp valuation
Ri is an equivalence relation (indistinguishability)Ri(w) = “set of worlds i cannot distinguish from w”
= “set of worlds compatible with i’s knowledge”truth conditions:
M,w p iff . . .M,w ¬ϕ iff . . .M,w ϕ ∧ ψ iff . . .M,w Kiϕ iff M,w′ ϕ for all w′ ∈ Ri(w)
15 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Epistemic logic: possible worlds semantics
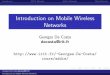
muddy children puzzle, initial situation
12R2
R1
12
R1
12R2
12
(reflexive arrows omitted)
M, 12 m1 ∧m2 ∧ K1m2 ∧ ¬K1m1 ∧ ¬K1¬m1
16 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Epistemic logic for epistemic planning?
can be modeled:init = formula of epistemic logicgoal = formula of epistemic logic
cannot be expressed:actionLaws
17 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Outline
1 Planning: KR vs. ICAPS
2 What’s in a planning problem?
3 States and goals: Epistemic Logic
4 Actions and plans: Dynamic Epistemic Logic
18 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
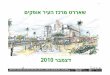
Muddy children: Episode 1
1 initially, common knowledge that nobody is muddy2 1 gets muddy but isn’t sure; 2 watches3 2 gets muddy but isn’t sure; 1 watches
12
R1
12
R1
R212
R1
121 gets muddy
=⇒ 122 gets muddy
=⇒ 12R2
12
19 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Dynamic epistemic logic DEL
idea: model uncertainty about current event by introducingpossible events
uncertainty about world uncertainty about eventpossible worlds possible eventsindistinguishability of worlds indistinguishability of events
⇒ ‘possible event models’distinguish agents who observe from agents who don’t
N.B.: an agent typically observes only very few events
muddy children:event model where 1 plays, 2 watches
skip1 R1getsMuddy1
(reflexive arrows omitted)
20 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
DEL: event models
EM = (E, {Si}i∈Agt, precond, effect) event model, whereE is a nonempty set of eventsSi ⊆ E × E
every Si is an equivalence relationeSi f = “i perceives occurrence of e as occurrence of f ”
precond : E −→ Fmlseffect : E −→ Fmls s.t. effect(e) conjunction of literals
(just as in STRIPS)
21 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
DEL: product construction
update world model WM = (W ,R ,V) by event model EM
WM ⊗ EM = WM′
where
W ′ = {(w, e) ∈ W × E : M,w precond(e)}(w, e)R ′i (v , f) iff wRiv and eSi f
V ′((w, e)) = (V(w) \ {p : p negative in effect(e)})∪ {p : p positive in effect(e)}
22 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
DEL for epistemic planning?
explored since >5 years [Bolander & Anderson 2011];[Lowe, Pacuit & Witzel 2011]; [Aucher, Maubert & Pinchinat 2014];[Yu, Li & Wang 2015],. . .
init = formula of multiagent epistemic logicgoal = formula of multiagent epistemic logicaction type = agent + event model
reasoning: not so easyplan existence undecidable in general[Bolander & Anderson 2011]; [Aucher & Bolander 2013];[Charrier, Maubert & Schwarzentruber 2016]decidable fragments: heavily restricted [Yu, Wen & Liu 2013];[Bolander et al. 2015],. . .
representation: some problems that seemingly wentunnoticed. . .
23 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
DEL for epistemic planning: problemsevent models rather describe action tokensactionLaws describe types, not tokenshow to describe conditional effects?
list all possible cases of perception of the actual eventinfinitely many conditional effects needed
conditional effects of getMuddy(i):
(inGardeni , mi)
(inGardenj , Kjmi)
(Ki inGardenj , Ki(Kjmi ∨ Kj¬mi))
(KjKi inGardenj , . . . )
...
(CKi,j inGardenj , CKi,j(Kjmi ∨ Kj¬mi))
⇒ event models with an infinite number of points!even when finite, event models have to be bigworld models typically grow exponentially when updated
24 / 25

KR vs. ICAPS What’s in a planning problem? States and goals: EL Actions and plans: DEL
Conclusion
knowledge representation with DEL event models:art rather than craftpractical problemsconceptual problems (type vs. token)
the other agents’ observation should be based on informationfrom the possible worlds model, not from the event model
edge-conditioned event models [Bolander, 2015]special propositional variable “agent i is watching”[Bolander et al., JoLLI 2016]
part of the state, not part of the action!special propositional variable “agent j is watching agent i”[Bolander et al., ongoing]
j changes her beliefs when j watches i’s actionj does not change her beliefs when j does not watch i’s action
25 / 25