Embed Size (px)
Citation preview

1
Analysis for the Earth Escape Strategy Using Unstable Manifolds of Sun-Earth Halo Orbit and Lunar Gravity Assists
Hongru Chen1), Yasuhiro Kawakatsu2) and Toshiya Hanada1) 1)Department of Aeronautics and Astronautics, Kyushu University, Fukuoka,819-0395 Japan
2)Japan Aerospace Exploration Agency, Kanagawa, 252-5210, Japan
Abstract
As halo orbits are of many advantages and getting popular in various space missions, the investigation for the extended mission following a halo orbit mission is considered worthwhile. The paper investigates the combination of unstable manifolds associated with the halo orbit and lunar gravity assists for the spacecraft initially in a Sun-Earth halo orbit to escape Earth. It is shown that there are four types of intersections of manifold tubes and Moon’s orbit. The four manifolds have different V∞ with respect to the Moon and the corresponding lunar swingbys can result in different levels of C3 with respect to the Earth and escape directions. To further exploit these manifold-guided lunar encounters, a second lunar swingby is considered where the solar gravity is effective in changing the V∞ at lunar re-encounters. The approach to finding second lunar swingbys is presented. A Sun-perturbed second lunar swingby is shown quite efficient in increasing the C3. Analyses reveal the maximum attainable C3 for the concerned scenario.
1. Introduction Low-energy transfers found in n-body system increase
the possibility and flexibility of interplanetary missions. One of the classic examples is the ISEE-3. The ISEE-3 achieved several missions including monitoring solar wind in a Sun-Earth halo orbit, exploring Earth’s magneto-tail and visiting comets beyond initial expectation.1 The success of ISEE-3 is owing to the elaborate planning of transfers where n-body dynamics were utilized. The periodic halo orbit about an equilibrium point in a three-body system (also known as the libration point or Lagrangian point) offers many advantages, such as constant distances and orientation with respect to the primary and secondary bodies for smooth observation and communication. There have been several missions around the Sun-Earth libration points L1 and L2 in addition to the ISEE-3, and many being planned. The example of ISEE-3 and increasing interests in halo orbit missions give rise to the need of the investigation for the mission extension following them.
Escaping the Earth gravitational field with minimum fuel cost is usually the primary task of an interplanetary mission. The fuel saving can contribute to an increase of the payload mass. Given a small ΔV, the spacecraft in an orbit about a libration point will depart away along an unstable manifold associated with the libration point orbit. On the contrary, a spacecraft can asymptotically converge into a libration point orbit along the associated stable manifolds. Manifolds reveal the phase space of trajectories associated with a periodic orbit, providing the tool for designing orbit transfers from or to libration points. Genesis is the first mission using invariant
manifolds to produce transfers from Earth to Sun-Earth L1 Lissajous orbit and back to the Earth.2 There have been studies on the use of the libration point dynamics for low-energy transfers between different gravitational systems.3-7 In the n-body system, specifically, lunar swingbys have proven capable of aiding Earth escape in a number of mission designs and analysis.8-11 In addition, if a longer flight time is practical, the solar tidal force can be utilized to vary the V∞ vector with respect to the Moon in a multiple-lunar-swingby, improving the lunar gravity assist for Earth escape, reducing the required ΔV to insert the spacecraft to a lunar orbit. The mission designs of Planet-B, Lunar-A and Hiten demonstrated these aspects.9,12
This study aims to give a comprehensive analysis of the Earth escape for the spacecraft initially in a Sun-Earth L1/L2 halo orbit by using the above-mentioned strategies. The JAXA mission DESTINY is going to be launched to the halo orbit about the Sun-Earth L2 point in 2018, and the possibility of extending the mission to visit a planet or an asteroid is currently under discussion. Results of this study will provide the related information to the mission.
The paper is organized into three parts. First, manifold-guided lunar encounters are presented; the possible escape trajectories that result from the corresponding lunar swingbys are analyzed and compared with the direct escapes from the halo orbit. Second, the effects of adding a second lunar swingby are analyzed. In that part, an analysis of multiple lunar swingby effects on C3 with respect to the Earth is given first. The approach to solving for the Sun-perturbed lunar swingbys is presented. The last part gives conclusions for the concerned problem.
2
2. Manifold-Guided Lunar Encounters Trajectories are considered in the circular restricted three-body problem (CR3BP) of the Sun-Earth system. There are five equilibrium points, and the three collinear points (L1, L2 and L3) are unstable. The linearized equations at L1, L2 and L3 reveal that there exist unstable periodic orbits about these points. Given a small ΔV, the spacecraft in an orbit about a libration point will depart away along an unstable manifold associated with the libration point orbit. In this study, the spacecraft is assumed initially in a Sun-Earth L2 halo orbit. The inclination and eccentricity of Moon’s orbit are not taken into account, as general intersections of unstable manifolds with Moon's orbit are considered regardless of the nodes of Moon’s orbital plane with respect to the ecliptic coordinate system. Besides, the Moon's gravity is only considered at the lunar gravity assist in the sense of impulsively deflecting the V∞ vector with respect to the Moon. Although it is a simplified model, reliable information can still be acquired for mission designs.
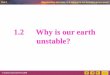
The three-dimensional manifolds of the halo orbits with z-amplitudes (Az) 280000km and 400000km are shown in x-y plane and x-z plane respectively in Figure 1. The grey circles mark the intersections of manifolds and the ecliptic
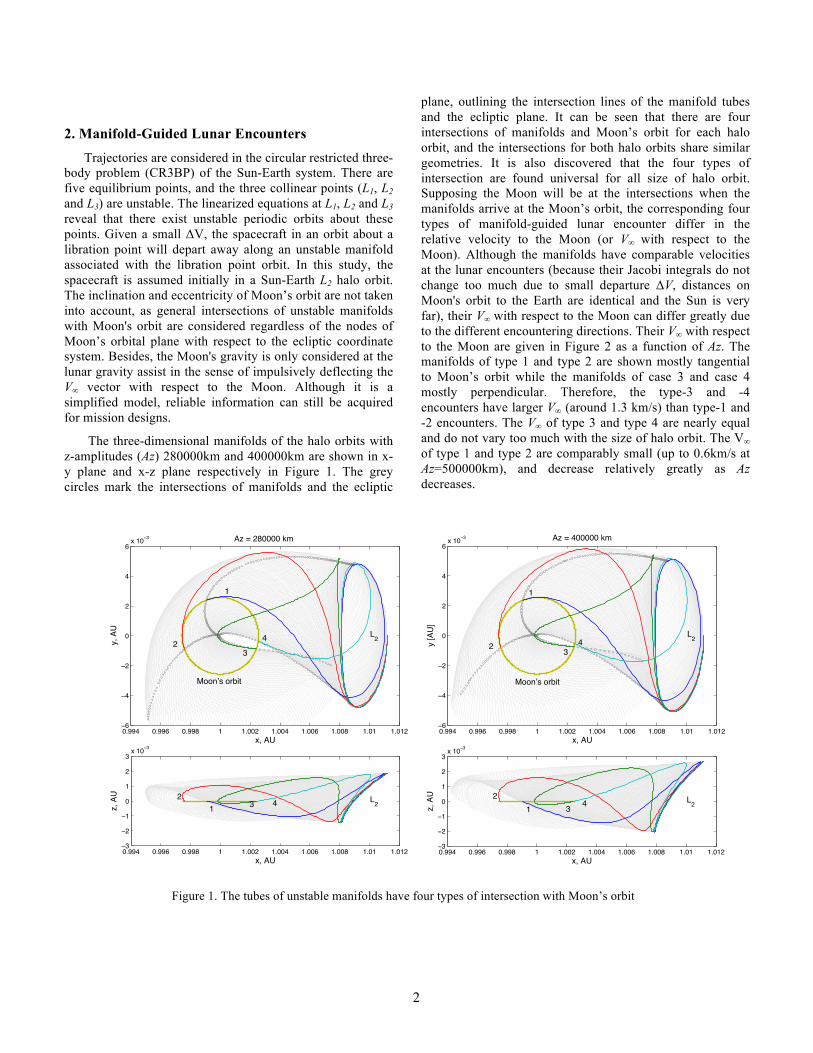
plane, outlining the intersection lines of the manifold tubes and the ecliptic plane. It can be seen that there are four intersections of manifolds and Moon’s orbit for each halo orbit, and the intersections for both halo orbits share similar geometries. It is also discovered that the four types of intersection are found universal for all size of halo orbit. Supposing the Moon will be at the intersections when the manifolds arrive at the Moon’s orbit, the corresponding four types of manifold-guided lunar encounter differ in the relative velocity to the Moon (or V∞ with respect to the Moon). Although the manifolds have comparable velocities at the lunar encounters (because their Jacobi integrals do not change too much due to small departure ΔV, distances on Moon's orbit to the Earth are identical and the Sun is very far), their V∞ with respect to the Moon can differ greatly due to the different encountering directions. Their V∞ with respect to the Moon are given in Figure 2 as a function of Az. The manifolds of type 1 and type 2 are shown mostly tangential to Moon’s orbit while the manifolds of case 3 and case 4 mostly perpendicular. Therefore, the type-3 and -4 encounters have larger V∞ (around 1.3 km/s) than type-1 and -2 encounters. The V∞ of type 3 and type 4 are nearly equal and do not vary too much with the size of halo orbit. The V∞ of type 1 and type 2 are comparably small (up to 0.6km/s at Az=500000km), and decrease relatively greatly as Az decreases.
Figure 1. The tubes of unstable manifolds have four types of intersection with Moon’s orbit
0.994 0.996 0.998 1 1.002 1.004 1.006 1.008 1.01 1.012−6
−4
−2
0
2
4
6x 10−3
x, AU
y [A
U]
L2
Az = 400000 km
0.994 0.996 0.998 1 1.002 1.004 1.006 1.008 1.01 1.012−3
−2
−1
0
1
2
3x 10−3
L2
x, AU
z, A
U
0.994 0.996 0.998 1 1.002 1.004 1.006 1.008 1.01 1.012−6
−4
−2
0
2
4
6x 10−3
x, AU
y, A
U L2
Az = 280000 km
0.994 0.996 0.998 1 1.002 1.004 1.006 1.008 1.01 1.012−3
−2
−1
0
1
2
3x 10−3
L2
x, AU
z, A
U
31
2
1
4
32
1
43
122
3 4 4
Moon’s orbit Moon’s orbit
3
Figure 2. The V∞ of the four types of manifold-guided lunar encounter with respect to the Moon as a function of Az
2.1. Escape Effects due to manifold-guided lunar swingbys
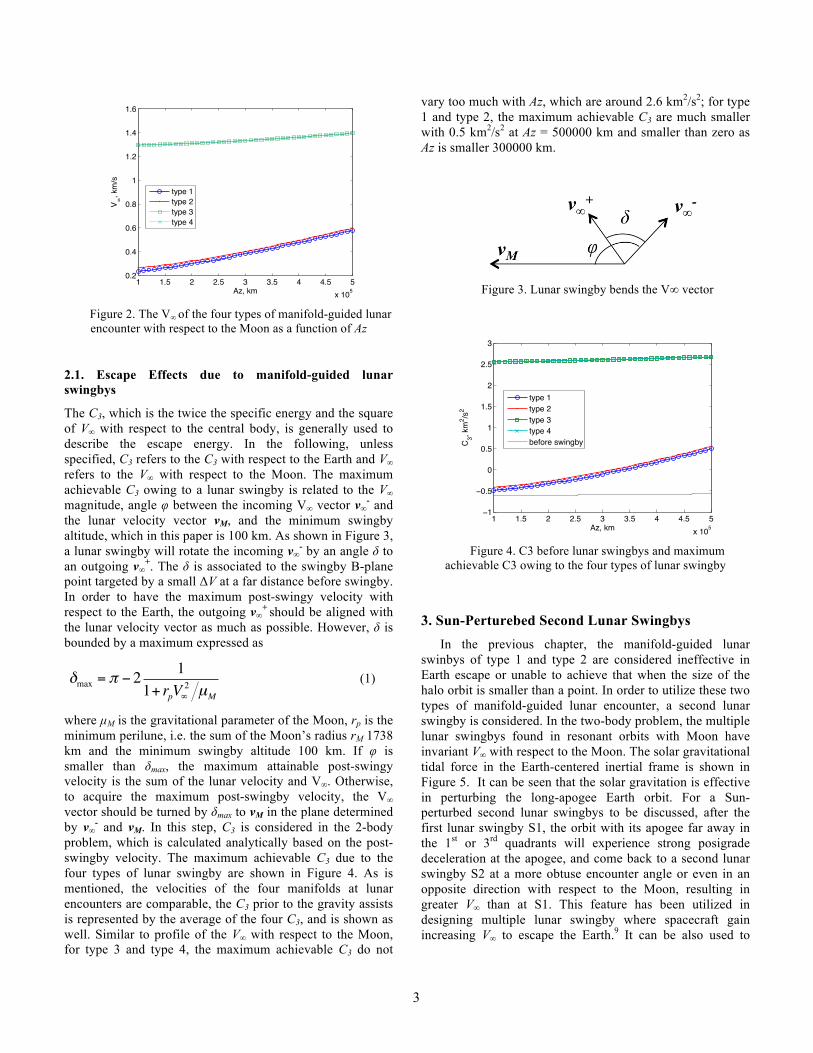
The C3, which is the twice the specific energy and the square of V∞ with respect to the central body, is generally used to describe the escape energy. In the following, unless specified, C3 refers to the C3 with respect to the Earth and V∞ refers to the V∞ with respect to the Moon. The maximum achievable C3 owing to a lunar swingby is related to the V∞ magnitude, angle φ between the incoming V∞ vector v∞- and the lunar velocity vector vM, and the minimum swingby altitude, which in this paper is 100 km. As shown in Figure 3, a lunar swingby will rotate the incoming v∞- by an angle δ to an outgoing v∞+. The δ is associated to the swingby B-plane point targeted by a small ΔV at a far distance before swingby. In order to have the maximum post-swingy velocity with respect to the Earth, the outgoing v∞+
should be aligned with the lunar velocity vector as much as possible. However, δ is bounded by a maximum expressed as
δmax = π − 21
1+ rpV∞2 µM
(1)
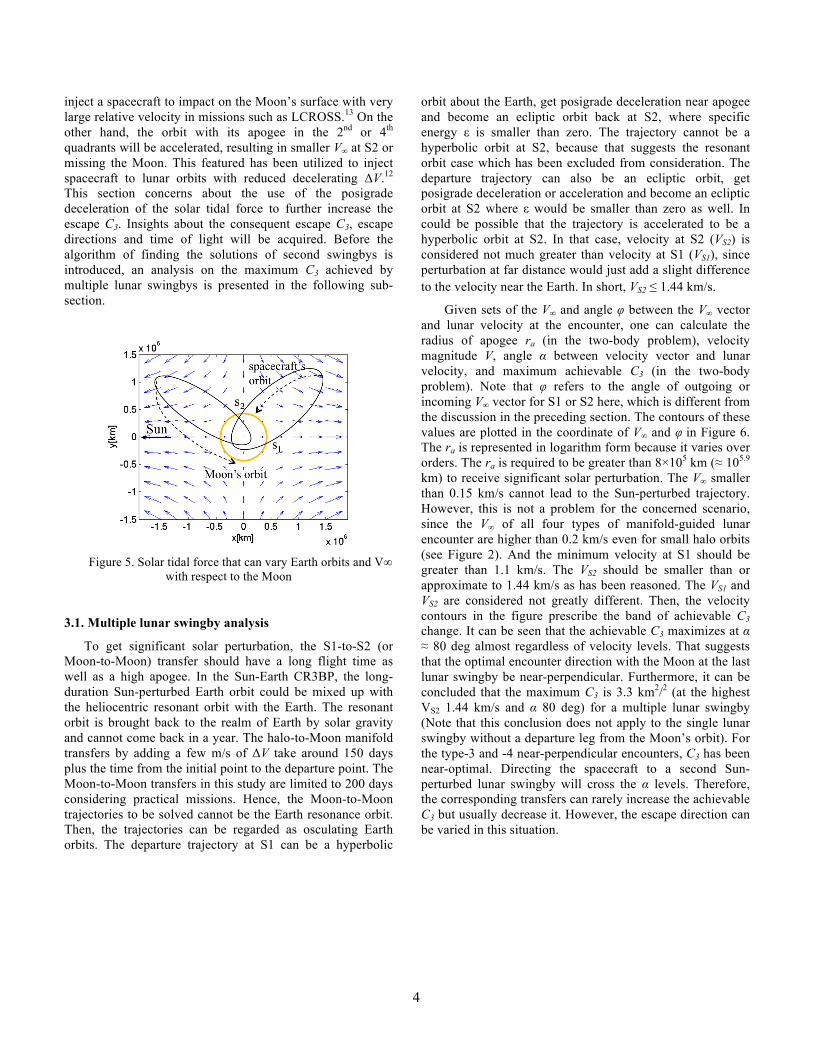
where µM is the gravitational parameter of the Moon, rp is the minimum perilune, i.e. the sum of the Moon’s radius rM 1738 km and the minimum swingby altitude 100 km. If φ is smaller than δmax, the maximum attainable post-swingy velocity is the sum of the lunar velocity and V∞. Otherwise, to acquire the maximum post-swingby velocity, the V∞ vector should be turned by δmax to vM in the plane determined by v∞- and vM. In this step, C3 is considered in the 2-body problem, which is calculated analytically based on the post-swingby velocity. The maximum achievable C3 due to the four types of lunar swingby are shown in Figure 4. As is mentioned, the velocities of the four manifolds at lunar encounters are comparable, the C3 prior to the gravity assists is represented by the average of the four C3, and is shown as well. Similar to profile of the V∞ with respect to the Moon, for type 3 and type 4, the maximum achievable C3 do not
vary too much with Az, which are around 2.6 km2/s2; for type 1 and type 2, the maximum achievable C3 are much smaller with 0.5 km2/s2 at Az = 500000 km and smaller than zero as Az is smaller 300000 km.
Figure 3. Lunar swingby bends the V∞ vector
Figure 4. C3 before lunar swingbys and maximum
achievable C3 owing to the four types of lunar swingby
3. Sun-Perturebed Second Lunar Swingbys In the previous chapter, the manifold-guided lunar
swinbys of type 1 and type 2 are considered ineffective in Earth escape or unable to achieve that when the size of the halo orbit is smaller than a point. In order to utilize these two types of manifold-guided lunar encounter, a second lunar swingby is considered. In the two-body problem, the multiple lunar swingbys found in resonant orbits with Moon have invariant V∞ with respect to the Moon. The solar gravitational tidal force in the Earth-centered inertial frame is shown in Figure 5. It can be seen that the solar gravitation is effective in perturbing the long-apogee Earth orbit. For a Sun-perturbed second lunar swingbys to be discussed, after the first lunar swingby S1, the orbit with its apogee far away in the 1st or 3rd quadrants will experience strong posigrade deceleration at the apogee, and come back to a second lunar swingby S2 at a more obtuse encounter angle or even in an opposite direction with respect to the Moon, resulting in greater V∞ than at S1. This feature has been utilized in designing multiple lunar swingby where spacecraft gain increasing V∞ to escape the Earth.9 It can be also used to
1 1.5 2 2.5 3 3.5 4 4.5 5x 105
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Az, km
V ∞, k
m/s
type 1type 2type 3type 4
1 1.5 2 2.5 3 3.5 4 4.5 5x 105
−1
−0.5
0
0.5
1
1.5
2
2.5
3
Az, km
C 3, km
2 /s2
type 1type 2type 3type 4before swingby
4
inject a spacecraft to impact on the Moon’s surface with very large relative velocity in missions such as LCROSS.13 On the other hand, the orbit with its apogee in the 2nd or 4th quadrants will be accelerated, resulting in smaller V∞ at S2 or missing the Moon. This featured has been utilized to inject spacecraft to lunar orbits with reduced decelerating ΔV.12 This section concerns about the use of the posigrade deceleration of the solar tidal force to further increase the escape C3. Insights about the consequent escape C3, escape directions and time of light will be acquired. Before the algorithm of finding the solutions of second swingbys is introduced, an analysis on the maximum C3 achieved by multiple lunar swingbys is presented in the following sub-section.
Figure 5. Solar tidal force that can vary Earth orbits and V∞
with respect to the Moon
3.1. Multiple lunar swingby analysis
To get significant solar perturbation, the S1-to-S2 (or Moon-to-Moon) transfer should have a long flight time as well as a high apogee. In the Sun-Earth CR3BP, the long-duration Sun-perturbed Earth orbit could be mixed up with the heliocentric resonant orbit with the Earth. The resonant orbit is brought back to the realm of Earth by solar gravity and cannot come back in a year. The halo-to-Moon manifold transfers by adding a few m/s of ΔV take around 150 days plus the time from the initial point to the departure point. The Moon-to-Moon transfers in this study are limited to 200 days considering practical missions. Hence, the Moon-to-Moon trajectories to be solved cannot be the Earth resonance orbit. Then, the trajectories can be regarded as osculating Earth orbits. The departure trajectory at S1 can be a hyperbolic
orbit about the Earth, get posigrade deceleration near apogee and become an ecliptic orbit back at S2, where specific energy ε is smaller than zero. The trajectory cannot be a hyperbolic orbit at S2, because that suggests the resonant orbit case which has been excluded from consideration. The departure trajectory can also be an ecliptic orbit, get posigrade deceleration or acceleration and become an ecliptic orbit at S2 where ε would be smaller than zero as well. In could be possible that the trajectory is accelerated to be a hyperbolic orbit at S2. In that case, velocity at S2 (VS2) is considered not much greater than velocity at S1 (VS1), since perturbation at far distance would just add a slight difference to the velocity near the Earth. In short, VS2 ≤ 1.44 km/s.
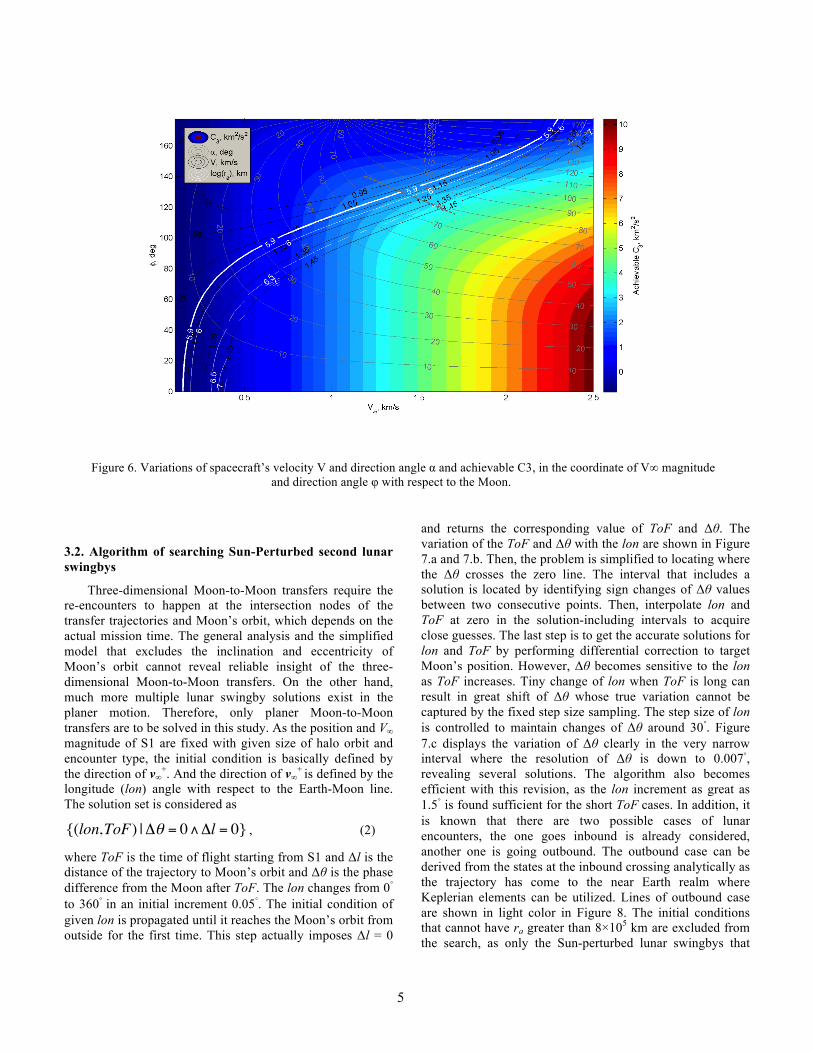
Given sets of the V∞ and angle φ between the V∞ vector and lunar velocity at the encounter, one can calculate the radius of apogee ra (in the two-body problem), velocity magnitude V, angle α between velocity vector and lunar velocity, and maximum achievable C3 (in the two-body problem). Note that φ refers to the angle of outgoing or incoming V∞ vector for S1 or S2 here, which is different from the discussion in the preceding section. The contours of these values are plotted in the coordinate of V∞ and φ in Figure 6. The ra is represented in logarithm form because it varies over orders. The ra is required to be greater than 8×105 km (≈ 105.9 km) to receive significant solar perturbation. The V∞ smaller than 0.15 km/s cannot lead to the Sun-perturbed trajectory. However, this is not a problem for the concerned scenario, since the V∞ of all four types of manifold-guided lunar encounter are higher than 0.2 km/s even for small halo orbits (see Figure 2). And the minimum velocity at S1 should be greater than 1.1 km/s. The VS2 should be smaller than or approximate to 1.44 km/s as has been reasoned. The VS1 and VS2 are considered not greatly different. Then, the velocity contours in the figure prescribe the band of achievable C3 change. It can be seen that the achievable C3 maximizes at α ≈ 80 deg almost regardless of velocity levels. That suggests that the optimal encounter direction with the Moon at the last lunar swingby be near-perpendicular. Furthermore, it can be concluded that the maximum C3 is 3.3 km2/2 (at the highest VS2 1.44 km/s and α 80 deg) for a multiple lunar swingby (Note that this conclusion does not apply to the single lunar swingby without a departure leg from the Moon’s orbit). For the type-3 and -4 near-perpendicular encounters, C3 has been near-optimal. Directing the spacecraft to a second Sun-perturbed lunar swingby will cross the α levels. Therefore, the corresponding transfers can rarely increase the achievable C3 but usually decrease it. However, the escape direction can be varied in this situation.
5
Figure 6. Variations of spacecraft’s velocity V and direction angle α and achievable C3, in the coordinate of V∞ magnitude and direction angle φ with respect to the Moon.
3.2. Algorithm of searching Sun-Perturbed second lunar swingbys
Three-dimensional Moon-to-Moon transfers require the re-encounters to happen at the intersection nodes of the transfer trajectories and Moon’s orbit, which depends on the actual mission time. The general analysis and the simplified model that excludes the inclination and eccentricity of Moon’s orbit cannot reveal reliable insight of the three-dimensional Moon-to-Moon transfers. On the other hand, much more multiple lunar swingby solutions exist in the planer motion. Therefore, only planer Moon-to-Moon transfers are to be solved in this study. As the position and V∞ magnitude of S1 are fixed with given size of halo orbit and encounter type, the initial condition is basically defined by the direction of v∞+. And the direction of v∞+ is defined by the longitude (lon) angle with respect to the Earth-Moon line. The solution set is considered as
{(lon,ToF) |Δθ = 0∧Δl = 0} , (2)
where ToF is the time of flight starting from S1 and Δl is the distance of the trajectory to Moon’s orbit and Δθ is the phase difference from the Moon after ToF. The lon changes from 0◦ to 360◦ in an initial increment 0.05◦. The initial condition of given lon is propagated until it reaches the Moon’s orbit from outside for the first time. This step actually imposes Δl = 0
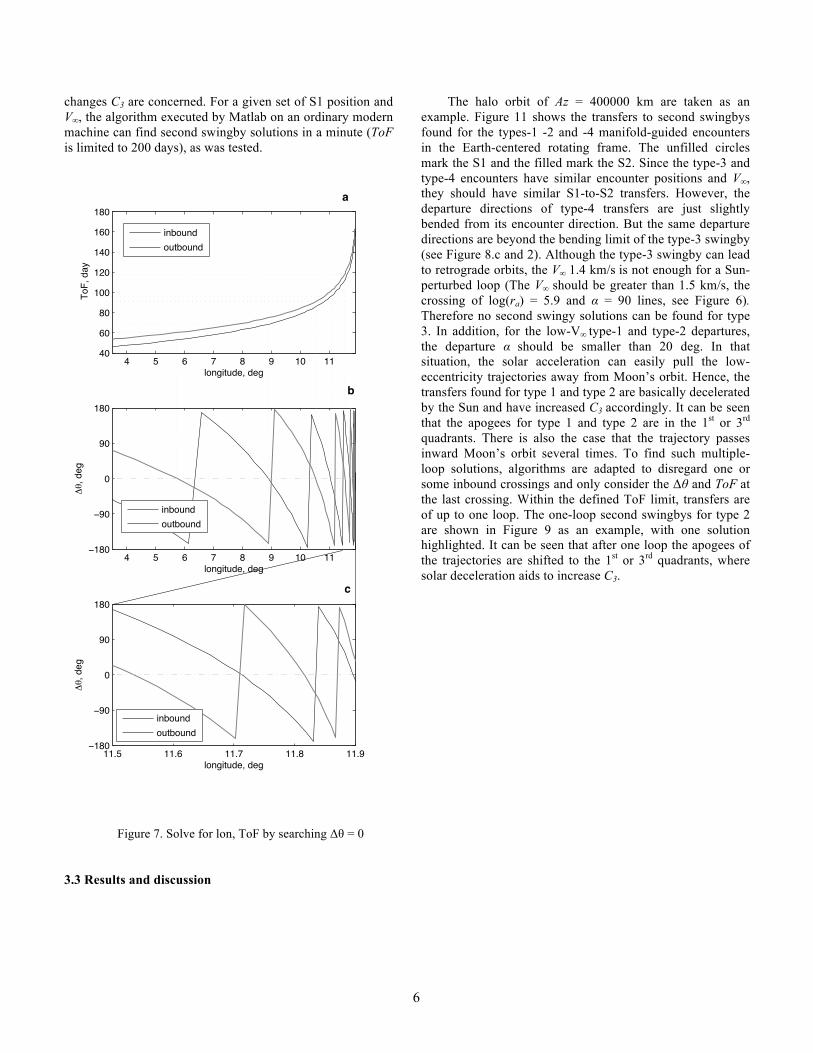
and returns the corresponding value of ToF and Δθ. The variation of the ToF and Δθ with the lon are shown in Figure 7.a and 7.b. Then, the problem is simplified to locating where the Δθ crosses the zero line. The interval that includes a solution is located by identifying sign changes of Δθ values between two consecutive points. Then, interpolate lon and ToF at zero in the solution-including intervals to acquire close guesses. The last step is to get the accurate solutions for lon and ToF by performing differential correction to target Moon’s position. However, Δθ becomes sensitive to the lon as ToF increases. Tiny change of lon when ToF is long can result in great shift of Δθ whose true variation cannot be captured by the fixed step size sampling. The step size of lon is controlled to maintain changes of Δθ around 30◦. Figure 7.c displays the variation of Δθ clearly in the very narrow interval where the resolution of Δθ is down to 0.007◦, revealing several solutions. The algorithm also becomes efficient with this revision, as the lon increment as great as 1.5◦ is found sufficient for the short ToF cases. In addition, it is known that there are two possible cases of lunar encounters, the one goes inbound is already considered, another one is going outbound. The outbound case can be derived from the states at the inbound crossing analytically as the trajectory has come to the near Earth realm where Keplerian elements can be utilized. Lines of outbound case are shown in light color in Figure 8. The initial conditions that cannot have ra greater than 8×105 km are excluded from the search, as only the Sun-perturbed lunar swingbys that
6
changes C3 are concerned. For a given set of S1 position and V∞, the algorithm executed by Matlab on an ordinary modern machine can find second swingby solutions in a minute (ToF is limited to 200 days), as was tested.
Figure 7. Solve for lon, ToF by searching Δθ = 0
3.3 Results and discussion
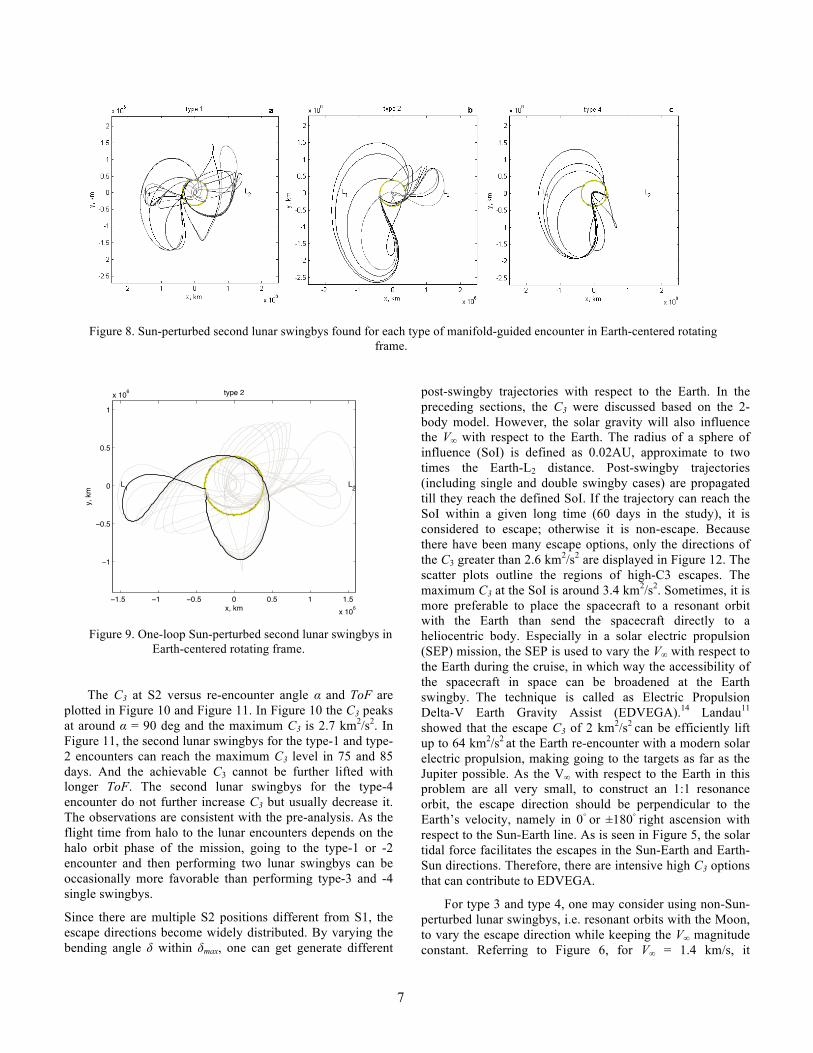
The halo orbit of Az = 400000 km are taken as an example. Figure 11 shows the transfers to second swingbys found for the types-1 -2 and -4 manifold-guided encounters in the Earth-centered rotating frame. The unfilled circles mark the S1 and the filled mark the S2. Since the type-3 and type-4 encounters have similar encounter positions and V∞, they should have similar S1-to-S2 transfers. However, the departure directions of type-4 transfers are just slightly bended from its encounter direction. But the same departure directions are beyond the bending limit of the type-3 swingby (see Figure 8.c and 2). Although the type-3 swingby can lead to retrograde orbits, the V∞ 1.4 km/s is not enough for a Sun-perturbed loop (The V∞ should be greater than 1.5 km/s, the crossing of log(ra) = 5.9 and α = 90 lines, see Figure 6). Therefore no second swingy solutions can be found for type 3. In addition, for the low-V∞ type-1 and type-2 departures, the departure α should be smaller than 20 deg. In that situation, the solar acceleration can easily pull the low-eccentricity trajectories away from Moon’s orbit. Hence, the transfers found for type 1 and type 2 are basically decelerated by the Sun and have increased C3 accordingly. It can be seen that the apogees for type 1 and type 2 are in the 1st or 3rd quadrants. There is also the case that the trajectory passes inward Moon’s orbit several times. To find such multiple-loop solutions, algorithms are adapted to disregard one or some inbound crossings and only consider the Δθ and ToF at the last crossing. Within the defined ToF limit, transfers are of up to one loop. The one-loop second swingbys for type 2 are shown in Figure 9 as an example, with one solution highlighted. It can be seen that after one loop the apogees of the trajectories are shifted to the 1st or 3rd quadrants, where solar deceleration aids to increase C3.
4 5 6 7 8 9 10 1140
60
80
100
120
140
160
180
longitude, deg
ToF,
day
4 5 6 7 8 9 10 11−180
−90
0
90
180
longitude, deg
∆θ,
deg
11.5 11.6 11.7 11.8 11.9−180
−90
0
90
180
longitude, deg
∆θ,
deg
inboundoutbound
inboundoutbound
inboundoutbound
a
b
c
7
Figure 8. Sun-perturbed second lunar swingbys found for each type of manifold-guided encounter in Earth-centered rotating
frame.
Figure 9. One-loop Sun-perturbed second lunar swingbys in
Earth-centered rotating frame.
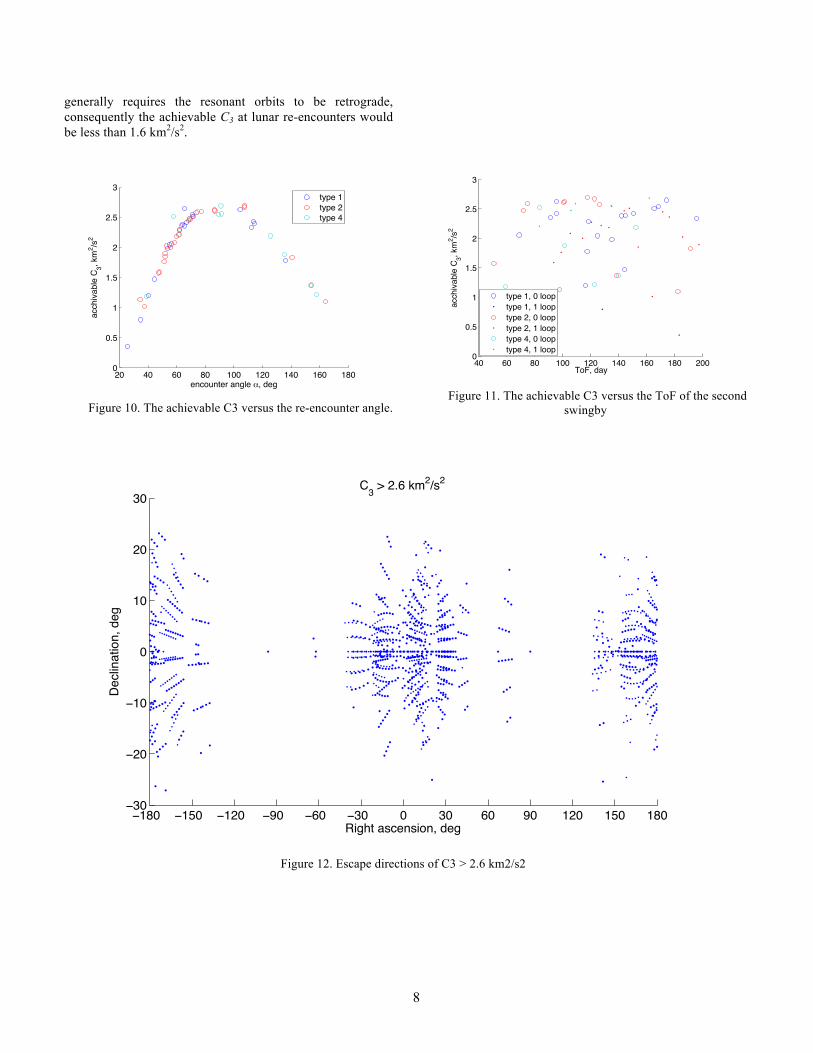
The C3 at S2 versus re-encounter angle α and ToF are plotted in Figure 10 and Figure 11. In Figure 10 the C3 peaks at around α = 90 deg and the maximum C3 is 2.7 km2/s2. In Figure 11, the second lunar swingbys for the type-1 and type-2 encounters can reach the maximum C3 level in 75 and 85 days. And the achievable C3 cannot be further lifted with longer ToF. The second lunar swingbys for the type-4 encounter do not further increase C3 but usually decrease it. The observations are consistent with the pre-analysis. As the flight time from halo to the lunar encounters depends on the halo orbit phase of the mission, going to the type-1 or -2 encounter and then performing two lunar swingbys can be occasionally more favorable than performing type-3 and -4 single swingbys.
Since there are multiple S2 positions different from S1, the escape directions become widely distributed. By varying the bending angle δ within δmax, one can get generate different
post-swingby trajectories with respect to the Earth. In the preceding sections, the C3 were discussed based on the 2-body model. However, the solar gravity will also influence the V∞ with respect to the Earth. The radius of a sphere of influence (SoI) is defined as 0.02AU, approximate to two times the Earth-L2 distance. Post-swingby trajectories (including single and double swingby cases) are propagated till they reach the defined SoI. If the trajectory can reach the SoI within a given long time (60 days in the study), it is considered to escape; otherwise it is non-escape. Because there have been many escape options, only the directions of the C3 greater than 2.6 km2/s2 are displayed in Figure 12. The scatter plots outline the regions of high-C3 escapes. The maximum C3 at the SoI is around 3.4 km2/s2. Sometimes, it is more preferable to place the spacecraft to a resonant orbit with the Earth than send the spacecraft directly to a heliocentric body. Especially in a solar electric propulsion (SEP) mission, the SEP is used to vary the V∞ with respect to the Earth during the cruise, in which way the accessibility of the spacecraft in space can be broadened at the Earth swingby. The technique is called as Electric Propulsion Delta-V Earth Gravity Assist (EDVEGA).14 Landau11 showed that the escape C3 of 2 km2/s2 can be efficiently lift up to 64 km2/s2 at the Earth re-encounter with a modern solar electric propulsion, making going to the targets as far as the Jupiter possible. As the V∞ with respect to the Earth in this problem are all very small, to construct an 1:1 resonance orbit, the escape direction should be perpendicular to the Earth’s velocity, namely in 0◦ or ±180◦ right ascension with respect to the Sun-Earth line. As is seen in Figure 5, the solar tidal force facilitates the escapes in the Sun-Earth and Earth-Sun directions. Therefore, there are intensive high C3 options that can contribute to EDVEGA.
For type 3 and type 4, one may consider using non-Sun-perturbed lunar swingbys, i.e. resonant orbits with the Moon, to vary the escape direction while keeping the V∞ magnitude constant. Referring to Figure 6, for V∞ = 1.4 km/s, it
−1.5 −1 −0.5 0 0.5 1 1.5x 106
−1
−0.5
0
0.5
1
x 106
x, km
y, k
m
L1 L2
type 2
8
generally requires the resonant orbits to be retrograde, consequently the achievable C3 at lunar re-encounters would be less than 1.6 km2/s2.
Figure 10. The achievable C3 versus the re-encounter angle.
Figure 11. The achievable C3 versus the ToF of the second
swingby
Figure 12. Escape directions of C3 > 2.6 km2/s2
20 40 60 80 100 120 140 160 1800
0.5
1
1.5
2
2.5
3
encounter angle α, deg
acch
ivab
le C
3, km
2 /s2
type 1type 2type 4
40 60 80 100 120 140 160 180 2000
0.5
1
1.5
2
2.5
3
ToF, day
acch
ivab
le C
3, km
2 /s2
type 1, 0 looptype 1, 1 looptype 2, 0 looptype 2, 1 looptype 4, 0 looptype 4, 1 loop
−180 −150 −120 −90 −60 −30 0 30 60 90 120 150 180−30
−20
−10
0
10
20
30C3 > 2.6 km2/s2
Right ascension, deg
Dec
linat
ion,
deg

9
4. Conclusions Following the completion of halo orbit mission, the
strategy of utilizing unstable manifolds and lunar gravity assists to achieve Earth escape is proposed and analyzed. The paper reveals the four types of manifold-guided lunar encounters. Two of the types can lead to effective lunar gravity assists resulting in a maximum C3 with respect to the Earth of 2.6 km2/s2.
Concerning the ineffective manifold-guided lunar swingbys (type 1 and type 2), the paper discusses the second lunar swingbys utilizing the solar tidal force to change V∞ as well as encounter direction, in order to improve the escape C3. However, there is an upper limit for the C3 achieved by the multiple lunar swingby, which is analyzed to be 3.3 km2/s2. An algorithm is introduced to solve for the nonlinear problem of Sun-perturbed transfers targeting second lunar swingbys. The second lunar swingby is proven quite efficient in lifting the achievable C3 for type 1 and type 2. The escape trajectories at the defined SoI have a maximum C3 of 3.4 km2/2 and favorable directions that lead to resonant orbits with the Earth, which significantly enhances the interplanetary mission design.
Reference 1Farquhar, R. W., “The Flight of ISEE-3/ICE: Origins,
Mission History and a Legacy”, AAS/AIAA Astrodynamics Specialist Conference, 1998.
2Howell, K. C., Barden, B. T., Wilson, R. S., and Lo, M. W., “Trajectory Design Using a Dynamical Systems Approach with Application to Gensis”, AAS/AIAA Astrodynamics Specialist Conference, AAS paper 97-709, 1997.
3Koon, W. S., Lo, M. W., Marsden, J. E., and Ross, S.D., "Low Energy Transfer to the Moon." Celestial Mechanics and Dynamical Astronomy. Vol. 81, 2001, pp. 63-73.
4Howell, K. C., and Kakoi, M., "Transfers between the Earth-Moon and Sun-Earth Systems Using Manifolds and Transit Orbits." Acta Astronautica. Vol. 59, 2006, pp. 367-380.
5Nakamiya, M., Yamakawa, H., Scheeres, D. J., and Yoshikawa, M., "Interplanetary Transfers Between Halo Orbits: Connectivity Between Escape and Capture Trajectories", Journal of Guidance, Control, and Dynamics, Vol. 33, No. 3 (2010), pp. 803-813.
6Mingotti, G., Topputo, F., and Bernelli-Zazzera, F., "Earth-Mars Transfers with Ballistic Escape and Low-thrust Capture." Celestial Mechanics and Dynamical Astronomy. Vol. 110, No. 2, 2011, pp. 169-188.
7Kakoi, M., Howell, K. C., and Folta, D., “Access to Mars from Earth–Moon libration point orbits: Manifold and direct options”, Acta Astronautica, 102, pp. 269-286.
8Guzman, J. J., Dunham, D. W., Sharer, P. J., and et al., "Stereo Mission Design Implementation." 20th International Symposium on Space Flight Dynamics. Annapolis, Maryland, USA, September 24-28, 2007.
9Kawaguchi, J., Yamasawa, H., Uesugi, T. and Matsuo, H., "On Making Use of Lunar and Solar Gravity Assists in LUNAR-A, PLANET-B Missions." Acta Astronautica. Vol.35, No.9-11, 1995, pp. 633-642.
10S. Campagnola, R. Jehn and C. Corral Van Damme, "Design of Lunar Gravity-Assist for the BepiColombo Mission to Mercury." Advances in the Astronautical Sciences. Vol. 119, Part I (2004), pp. 427-442.
11Landau, D., McElrath, T. P., Grebow, D., and Strange, N. J., "Efficient Lunar Gravity Assists for Solar Electric Propulsion Missions." Advances in the Astronautical Sciences. Vol. 143, Part I (2012), pp. 917-934.
12Belbruno, E. A., and Miller, J. K., “Sun-Perturbed Earth-to-Moon Transfers with Ballistic Capture”, Journal of Guidance, Control, and Dynamics, Vol. 16, No. 4, 1993.
13Colaprete, A., Briggs, G., Ennico, K., and et al, “An Overview of the Lunar Crater Observation and Sensing Satellite (LCROSS) Mission - A Mission to Investigate Lunar Polar Hydrogen”, 39th Lunar and Planetary Science Conference, March 10-14, 2008, League City, Texas. LPI Contribution No. 1391., p.1838
14Kawaguchi, J., “Solar Electric Propulsion Leverage: Electric Delta-VEGA (EDVEGA) Scheme and its Application”, Proceedings of 10th Workshop on Astrodynamics and Flight Mechanics, pp. 113-122, 2000.
![Unstable manifolds of relative periodic orbits in the ...predrag/papers/BudCvi15.pdf · Unstable manifolds of relative periodic orbits 3 sandbox for developing intuition about turbulence[33]](https://img.pdfslide.us/doc/110x75/5aa55ec17f8b9afa758d1736/unstable-manifolds-of-relative-periodic-orbits-in-the-predragpapersbudcvi15pdfunstable.jpg)










![UNSTABLE - University of Manitoba€¦ · 3Centre for Earth Observation Science (CEOS), University of Manitoba 4Recherche en Prévision Numérique [RPN] (Numerical Weather Prediction](https://img.pdfslide.us/doc/110x75/5edc70aead6a402d666718f4/unstable-university-of-manitoba-3centre-for-earth-observation-science-ceos.jpg)