Embed Size (px)
Citation preview

AN1477Digital Compensator Design for LLC Resonant Converter
ABSTRACTA half-bridge LLC resonant converter with Zero VoltageSwitching (ZVS) and Pulse Frequency Modulation(PFM) is a widely used topology for DC/DC conversion.A Digital Signal Controller (DSC) provides componentcost reduction, flexible design, and the ability to monitorand process the system conditions to achieve greaterstability. The dynamics of the LLC resonant converterare investigated using the small signal modeling tech-nique based on the Extended Describing Functions(EDF) methodology. A comprehensive description ofcompensator design for control of the LLC converter isalso presented.
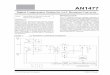
INTRODUCTIONThe LLC resonant converter topology, illustrated inFigure 1, allows ZVS for half-bridge MOSFETs, therebyconsiderably lowering the switching losses and improv-ing the converter efficiency. Mathematical modeling ofresonant converters is different from the conventionalfixed frequency Pulse-Width Modulation (PWM)converters. For LLC converter modeling, the method ofaveraging cannot be used because some statevariables do not have a DC operating point. We shouldtherefore, use other modeling techniques, such as theExtended Describing Function (EDF). In order to designa suitable digital compensator, the large signal andsmall signal models of the LLC resonant converter arederived using the EDF technique.
FIGURE 1: LLC RESONANT CONVERTER SCHEMATIC
Author: Dhaval Patel and Ramesh Kankanala Microchip Technology Inc.
Q4
Q1
Q2
D1
A
Vin
B
C2
C1
D2
Q3
Q1
Q2 dsPIC33EPXXGSXXX
R
irLs Cs im
Lmnp
ns
ns
isp Io
rc
Cf
–
+
ADCMOSFET
DriverMCP1404E
MOSFETDriver
MCP1404E
-VE
+VE
V0
DigitalCompensator
PWMOutput
DriverTransformers
2012-2018 Microchip Technology Inc. DS00001477B-page 1

AN1477
Conventional methods, such as State-Space Averaging(SSA), have been successfully applied to PWM switch-ing converters. In PWM switching converters, theswitch network is replaced by an average circuit modeland only low-frequency (DC) components are consid-ered, while ignoring switching harmonics. In general,the large and small signal modeling of PWM switchingconverters is done by considering the output LC filter.Typically, the natural frequency (fo) of the output LCfilter is much lower than the switching frequency (fs).In frequency controlled resonant converters, switchingfrequency is close to the natural frequency of the LCresonant tank. The inductor current and capacitor volt-age of the LC resonant tank, magnetizing current andprimary voltage of the transformer contain switchingfrequency harmonics, which must be considered toobtain an accurate model. Therefore, modeling is doneby considering magnetizing inductance (Lm), leakageinductance (Ls) and resonant capacitance (Cs). The Ls,Lm and Cs constitute the primary resonant components.
The small signal modeling approach, based on theEDF method, is generally applied to model LLC reso-nant converters as this method considers all switchingfrequency harmonics for accuracy. Using the EDF, it iseasy to obtain the commonly used transfer functions,such as control-to-output transfer function (Gv) andline-to-output transfer function (Gvg).
SMALL SIGNAL MODELING OF LLC RESONANT CONVERTERResonant DC/DC converters are nonlinear systemsand a dynamic model is helpful to determine the linear-ized small signal model, and thereby, the systemtransfer functions for the Pulse Frequency Modulated(PFM) DC/DC converters.
The following seven-step process describes how toobtain the plant transfer functions for the PFM DC/DCconverters.
1. Time Variant Nonlinear State EquationsState equations are obtained by writing the circuitequations using Kirchhoff’s Laws for each statevariable.
2. Harmonic ApproximationQuasi-sinusoidal current and voltage waveforms ofthe LLC resonant tank are resonant current (ir(t)),magnetizing current (im(t)) and voltage acrossresonant capacitor (vcr(t)). These parameters areapproximated to their fundamental components.The current and voltage of the output filter areapproximated to their DC components.
3. Extended Describing Function (EDF)A linear, stationary system responds to a sinusoidwith another sinusoid of the same frequency, butwith modified amplitude and phase. The describingfunction method is used to represent a nonlinearfunction in a linear manner by considering only thefundamental component of the response of thenonlinear system.In this application note, higher order harmonics areignored as they are considered to be negligible.This principle of describing functions is extended tomodel resonant converters and it is labeled as EDF.Using the EDF method, the discontinuous terms inthe nonlinear state equations are approximated totheir fundamental or DC components.
4. Harmonic BalanceThe quasi-sinusoidal terms and the nonlinear dis-continuous terms obtained from the harmonicapproximation and EDF are substituted in thestate equations. The coefficients of DC, sine andcosine components are then separated to obtainthe modulation equations (an approximate largesignal model).
5. Obtaining the Steady-State Operating PointA large signal model from the harmonic balance isused to obtain the steady-state operating point bysetting the derivative terms of harmonic balanceequations to zero. This is because the statevariables do not change with time in steady state.
6. Perturbation and Linearization of HarmonicBalance Equations The large signal model obtained from the harmonicbalance has nonlinear terms arising from theproduct of two or more time varying quantities. Thelinearized model is obtained by perturbing thelarge signal model equations about a chosen oper-ating point and by eliminating the higher order(nonlinear) terms.
7. State-Space ModelThe state-space model of a continuous timedynamic system can be obtained from theperturbed and linearized model of the harmonicbalance equations, described in Step 6, to derivethe control-to-output transfer function.
DS00001477B-page 2 2012-2018 Microchip Technology Inc.

AN1477
Derivation of Nonlinear State EquationsA quasi-square wave voltage (vAB ), generated from theactive half-bridge network, is applied to the resonanttank of the LLC resonant converter, as illustrated inFigure 2.FIGURE 2: EQUIVALENT CIRCUIT OF LLC RESONANT CONVERTER
The state equations are obtained in Continuous TankCurrent mode by using Kirchhoff’s Current Law (KCL)and Kirchhoff’s Voltage Law (KVL), as shown inEquation 1 through Equation 4.
EQUATION 1: RESONANT TANK VOLTAGE
In this application, the LLC resonant converter outputvoltage is regulated by modulating the switchingfrequency (s).
EQUATION 2: RESONANT TANK CURRENT
EQUATION 3: TRANSFORMER PRIMARY VOLTAGE
EQUATION 4: TRANSFORMER SECONDARY CURRENT
The output voltage (v0) is shown in Equation 5.
EQUATION 5: OUTPUT VOLTAGE
irA
B
vAB
ipLs Cs
+ Vcr –
Lm
np:ns :nsQ3
Q4
Io
v cfR v o
Ts
Vin
rs
mi
Cf
rc
+
–+–
isp
v'se
vse
vse
vAB Ls
dirdt-------
irrs vcr v'se+ + +=
Where:
v’se = n vse
= n sgn(ip) abs(vse)
= n sgn(ip) (rd abs(isp) + vo)
Here:
sgn(ip) = -1, if i p < 0
+1, if i p 0
ir Csdvcrdt
----------=
v'se Lmdimdt
--------=
abs isp 1rcR----+
Cfdvcfdt--------- 1
R--- vcf+=
Where:
vo r'c abs isp r'crc----- vcf+=
r'c rc R=
2012-2018 Microchip Technology Inc. DS00001477B-page 3

AN1477
Applying Harmonic ApproximationThe Fourier series decomposes periodic functions orperiodic signals into a sum of (possibly infinite) simpleoscillating functions (sines and cosines, or complexexponentials). Expressing the function (f(x)) as aninfinite series of sine and cosine functions is shown inEquation 6.EQUATION 6: GENERAL FOURIER EXPANSION
The primary side resonant tank parameters, ir(t), vc(t)and im(t), provided in Equation 7, are approximated totheir fundamental harmonics, and the output filter volt-age (vcf) is approximated to the DC component. Thederivatives of ir(t), vcr(t) and im(t) are shown inEquation 7.
EQUATION 7: FUNDAMENTAL APPROXIMATION OF PRIMARY TANK PARAMETERS
The amplitudes of sine component of resonantcurrent (is), cosine component of resonant current (ic),sine component of resonant capacitor voltage (vs),cosine component of resonant capacitor voltage (vc),sine component of magnetizing current (ims) and cosinecomponent of magnetizing current (imc) are slow timevarying components. Therefore, the dynamic behaviorof these parameters can be analyzed.
Figure 3 and Figure 4 illustrate the simulation wave-forms of the LLC resonant converter operating at belowthe resonant frequency and Continuous Tank Currentmode.
f x a0 an nx sin bn nx cos+
n 1=
=
f x a1 x sin b1 x cos=
Expressing f(x) by considering only the fundamental components and ignoring the DC component, and otherharmonic terms is :
a0 a1 x sin a2 2x sin a3 3x b1 x b2 2x b3 3x coscoscossin =
ir t is t st sin ic t st cos–=
vcr t vs t st sin vc t st cos–=
im t ims t st sin imc t st cos–=
dirdt-------
disdt------- sic+
st sindicdt------- sis–
st cos–=
dvcrdt-----------
dvsdt-------- svc+
st sindvcdt-------- svs–
st cos–=
dimdt---------
dimsdt----------- s imc+
s t sin=
Where:
s = Switching frequency in radians/second
dimcdt------------ sims–
st cos–
DS00001477B-page 4 2012-2018 Microchip Technology Inc.

AN1477
FIGURE 3: SIMULATION WAVEFORMS OF LLC RESONANT CONVERTERTime (ms)
Time (ms)
Time (ms)
Resonant Inductor Current
Resonant Capacitor Voltage
Input Voltage
2012-2018 Microchip Technology Inc. DS00001477B-page 5

AN1477
FIGURE 4: SIMULATION WAVEFORMS OF LLC RESONANT CONVERTERMagnetizing Inductor Current
Output Filter Capacitor Voltage
Time (ms)
Time (ms)
DS00001477B-page 6 2012-2018 Microchip Technology Inc.

AN1477
Applying Extended Describing Function (EDF)Extended Describing Function is a powerful mathemat-ical approach for understanding, analyzing, improvingand designing the behavior of nonlinear systems.The nonlinear terms provided in Equation 1 throughEquation 5, v’se and abs(isp), can be approximated totheir fundamental harmonic terms and DC terms.
The functions, f1(d, vin), f2(iss, isp,n abs (vse)), f3(isc, isp,n abs (vse)) and f4(iss, isc), are called EDFs. Where iss, iscare the sine and cosine components of the transformersecondary current, and isp is the resultant current flowingin secondary. f1, f2, f3 and f4 are functions of the harmoniccoefficients of state variables at chosen operating condi-tions. The EDF terms can be calculated by using theFourier expansion of nonlinear terms. The EDF approx-imation to nonlinear states is shown in Equation 8.
EQUATION 8: EDF APPROXIMATION
Figure 5 illustrates a typical switching waveform of ahalf-bridge inverter which is the input to the LLCresonant tank (θ = Dead Time, d = Duty Cycle).
FIGURE 5: OUTPUT SWITCHING WAVEFORM OF HALF-BRIDGE INVERTER
The fundamental output voltage of a half-bridgeinverter is shown in Equation 9.
EQUATION 9: OUTPUT VOLTAGE OF HALF-BRIDGE INVERTER
vAB t f1 d vin st sin=
isp f4 iss isc =
isp sgn n abs vse f2 iss isp n abs vse stsin f3 isc isp n abs vse –=
20
d
Vin
t
VAB
f1 d vin 22------ vin t sin td
–
=
f1 d vin 2vin2----------- t cos
– –=
f1 d vin 2vin
----------- cos2vin
----------- 2---
d2------–
cos= =
f1 d vin 2vin2----------- cos – cos– =
Where:
ves = Sine component of the output voltageof half-bridge inverter
f1 d vin 2vin
----------- 2---d sin ves= =
2---
d2------–=
2012-2018 Microchip Technology Inc. DS00001477B-page 7

AN1477
The switching waveform has an odd symmetry. There-fore, there is no cosine component (vec = 0, where vecis the cosine component of the output voltage of thehalf-bridge inverter) in the switching waveform andthe sine component (ves) forms the fundamentalcomponent of vAB .The second expression in Equation 8 is based on thefundamental frequency approximation. Fundamentalcomponent of transformer primary voltage can bedecomposed in sine and cosine terms, where f2(iss, isp,n abs(vse)) and f3(isc, isp, n abs(vse)) are the magnitudeof sine and cosine components, respectively. Deriva-tion of f2 and f3 is shown in Equation 10. A factor of 4/included in Equation 10 is based on the fundamentalcomponent of a square wave of transformer primaryvoltage.
The EDF approximation to the nonlinear transformerprimary voltage is shown in Equation 10.
EQUATION 10: EDF APPROXIMATION TO TRANSFORMER PRIMARY VOLTAGE
Harmonic BalanceHarmonic balance is a frequency domain method usedto calculate the steady-state response of nonlineardifferential equations. The term, “harmonic balance”, isdescriptive of the method, which uses the Kirchhoff’sCurrent Laws (KCLs) written in the frequency domainand a chosen number of harmonics. Effectively, themethod assumes that the solution can be representedby a linear combination of sinusoids, and then balancescurrent and voltage sinusoids to satisfy the Kirchhoff’sLaws. The harmonic balance method is commonlyused to simulate circuits which include nonlinearelements.
Substituting Equation 9 and Equation 10 into Equation 1through Equation 5, and separating the DC, sine andcosine terms, Equation 11 through Equation 13 areobtained.
EQUATION 11: SINE AND COSINE COMPONENTS OF TANK VOLTAGE
EQUATION 12: SINE AND COSINE COMPONENTS OF TANK CURRENT
EQUATION 13: SINE AND COSINE COMPONENT OF TRANSFORMER PRIMARY VOLTAGE
4n
------ipcipp------ abs vse vpc==
f2 iss isp n abs vse 4---
issisp------ n abs vse =
f3 isc isp n abs vse 4---
iscisp------ n abs vse =
ipp ips2 ipc
2+=
4n
------ipsipp-------- abs vse vps==
Where:
vps, vpc = Sine, cosine components of the transformer primary voltage
ips, ipc = Sine, cosine components of thetransformer primary current
ipp = Resultant transformer primary current
iss, isc = Sine, cosine components of thetransformer secondary current
isp = Resultant current flowing in secondary
n = np/ns = Transformer turns ratio
L= sdisdt------- sic+
rsis vs4n
------ipsipp--------abs vse + + +
ves Lsdisdt------- sic+
rsis vs vps+ + +=
vec Ls
dicdt------- sis–
rsic vc vpc+ + +=
L= s
dicdt------- sis–
rsic vc4n
------ipcipp--------abs vse + + +
is Csdvsdt-------- svc+
=
ic Cs
dvcdt-------- svs–
=
Lmdims
dt----------- simc+ 4n
------
ipsipp-------- abs vse vps= =
Lmdimc
dt------------ sims– 4n
------
ipcipp-------- abs vse vpc= =
DS00001477B-page 8 2012-2018 Microchip Technology Inc.

AN1477
Only the DC term is considered for the output capacitorvoltage, as shown in Equation 14.EQUATION 14: OUTPUT FILTER CAPACITOR VOLTAGE
The output voltage equation is shown in Equation 15.
EQUATION 15: OUTPUT VOLTAGE
Equation 11 through Equation 15 are the nonlinearlarge signal model of the LLC resonant converterpower stage and are illustrated in Figure 6. It is import-ant to note that the input of Equation 12 throughEquation 15, vg, s, d, is slow varying quantities withrespect to the switching frequency. Therefore, themodulation equations can be easily perturbed andlinearized at chosen operating points.
FIGURE 6: LARGE SIGNAL MODEL OF LLC RESONANT CONVERTER
Deriving Steady-State Operating PointUnder steady-state conditions, the state variables of themodulation equations, Equation 12 through Equation 14,do not change with time. For a chosen operating point,the time derivatives in Equation 12 through Equation 14are set to zero and the steady-state values are obtained(shown in upper case letters). The transformer currentson the primary and secondary sides are shown inEquation 16.
EQUATION 16: TRANSFORMER CURRENTS
The output filter capacitor voltage in steady-state con-ditions can be calculated by substituting Equation 16into Equation 14, as shown in Equation 17.
EQUATION 17: FILTER CAPACITOR VOLTAGE
Transformer secondary voltage in steady-state is derivedusing Equation 15, which is shown in Equation 18. Thesteady-state analysis for the tank current, resonantcapacitor voltage and magnetizing current are providedin Equation 19 through Equation 23.
1rcR-----
+ Cf
dvcfdt
---------- 1R---vcf
+2--- isp=
v02--- r'c isp
r'crc------
vcf+=
s Lmims
imsCs
–+
+ –
+–+
–
–+
– +is rs Ls + Vs
Cs
ips
Lm VpsVes–+
–+
Vpc
Lmimc
+ Vc –
Lsrsic
Vec
Cf
2/p isp
rc
Vcf
VoR
ipc
Iord
–
sCsVs
sLsis
sLsicsCsVc
sLmimc
+
–
ipp ips2 ipc
2+=
Primary Current:
isp iss2 isc
2+ n ips
2 ipc2
+ nipp= = =
Where:n = np/ns = Transformer turns ratio
Secondary Current:
VcfR-------
2n
------ Ipp2--- Isp= =
Vcf 2n
------ IppR=
2012-2018 Microchip Technology Inc. DS00001477B-page 9

AN1477
EQUATION 18: TRANSFORMERSECONDARY VOLTAGE
Substituting the value of Equation 17 into the sinecomponent of tank voltage, the result obtained isshown in Equation 19.
EQUATION 19: SINE COMPONENT OF TANK VOLTAGE
Substituting the value of Equation 17 into the cosinecomponent of the tank voltage, the result obtained isshown in Equation 20.
EQUATION 20: COSINE COMPONENT OF TANK VOLTAGE
The steady-state values of sine and cosine compo-nents of the tank current can be obtained by equatingdvs/dt and dvc/dt to zero. The result is shown inEquation 21.
EQUATION 21: SINE AND COSINE COMPONENTS OF TANK CURRENT
Substituting the value of Equation 17 into the sinecomponent of magnetizing current, the result is shownin Equation 22.
EQUATION 22: SINE COMPONENT OF MAGNETIZING CURRENT
abs vse rd2--- isp vo+=
rd2--- Isp
2--- rc'Isp
rc'rc----- Vcf
+ +=
rd rc'+ rc'rc----- R+
2n
------Ipp=
rd rc'+ 2n
------Ipprc'rc----- 2n
------IppR+=
rd R+ 2n
------Ipp=
ves Lsdisdt------- sic+
rsis vs4---
ipsipp--------n abs vse + + +=
rsIs LssIc Vs ReIps+ + + 2--- Vin=
Ips Is Ims–=Where:
rs Re+ Is LssIc Vs ReIms2---Vin=–+ +
Re8n2
2--------- rd R+ =
LssIc rsIs Vs4---
IpsIpp-------- 2n2
--------- rd R+ Ipp+ + +
Ves2---Vin= =
vec Ls
dicdt------- sis–
rsic vc4---
ipcipp-------- n abs vse + + +=
LssIs– rsIc Vc IpcRe 0=+ + +
Ipc Ic Imc–=
LssIs– rs Re+ Ic Vc ImcRe–+ + 0=
Where:
LssIs– rsIc Vc4---
IpcIpp-------- 2n2
--------- rd R+ Ipp+ + +
Vec 0==
Cs
dvsdt-------- svc+
is=
Is CssVc 0=–
Ic CssVs+ 0=
Csdvcdt-------- svs–
ic=
Lmdimsdt---------- s imc+
4---
ipsipp-------- n abs vse =
LmsImc ReIps 0=–
ReIs LmsImc– ReIms– 0=
DS00001477B-page 10 2012-2018 Microchip Technology Inc.

AN1477
Substituting the value of Equation 17 into the cosinecomponent of magnetizing current, the result is shownin Equation 23.EQUATION 23: COSINE COMPONENT OF MAGNETIZING CURRENT
Equation 20 through Equation 23 are arranged, asshown in Equation 24.
EQUATION 24: ARRANGEMENT OF STEADY-STATE EQUATIONS
To obtain the tank current, capacitor voltage and mag-netizing current from the steady-state equations,Equation 24 is formulated in the matrix form, as shownin Equation 25.
EQUATION 25: STEADY-STATE OPERATING POINT
Perturbation and Linearization of Harmonic Balance EquationsThe nonlinear system equations, Equation 12 throughEquation 14, are in the form of: x′ = f(x(t), u(t));x(t) = state of the nonlinear system and u(t) = input tothe system.
The function (x′) can be linearized about an operatingpoint and is expressed in the form of: x′ = Ax + Bu,where A and B are the Jacobian matrices of the systemwith respect to x(t) and u(t), as shown in Equation 26.
EQUATION 26: JACOBIAN MATRICES
Lmdimc
dt------------ sims– 4n
------
ipcipp-------- n abs vse =
L– msIms ReIpc 0=–
LmsIms ReIc ReImc–+ 0=
rs Re+ Is LssIc Vs ReIms–+ +2---Vin Ves= =
Is CssVc– 0=
Ic CssVs+ 0=
ReIs LmsImc– ReIms– 0=
LmsIms ReIc ReImc–+ 0=
LssIs– rs Re+ Ic Vc ImcRe–+ + 0 Vec= =
Where:
X
rs Re+ Lss 1 0 Re– 0
Ls s– rs Re+ 0 1 0 Re–
1 0 0 Cs s– 0 0
0 1 Cs s 0 0 0
Re 0 0 0 Re– Lm s–
0 Re 0 0 Lms Re–
=
U0
Ves
00000
= Y
Is
IcVsVcImsImc
=
X Y U0=
Y X 1– U0=
Bijf x t u t ( , )i
uj t --------------------------------
x0 u0
=
Aijf x t u t ( , )i
xj t --------------------------------
x0 u0
=
Where:x0 and u0 represent the steady-state operating points.
2012-2018 Microchip Technology Inc. DS00001477B-page 11

AN1477
In the perturbation and linearization step, it is assumedthat the averaged state variables and the input vari-ables consist of the constant DC component, and asmall signal AC variation about the DC component.Perturbed signals are shown in Equation 27.EQUATION 27: PERTURBED SIGNALS
The sine component of the transformer primaryvoltage (vps) is linearized around the steady-stateoperating point, as shown in Equation 28.
EQUATION 28: LINEARIZATION OF SINE COMPONENT OF TRANSFORMER PRIMARY VOLTAGE
vin Vin vin+= d D d+= s s s+= vps Vps vps+= vpc Vpc vpc+= ips Ips ips+=
ipc Ipc ipc+= ipp Ipp ipp+= vcfVcf
vcf+= ims Ims ims+= imc Imc imc+= is Is is+=
ic Ic ic+= vs Vs vs+= vc Vc vc+= ves Ves ves+= v0 V0 v0+=
, , , , , ,
, , , , , ,
, , , ,
vps4n
------ipsipp--------abs vse 4n
------
r'crc-----
ips
ips2 ipc
2+
--------------------------------vcf8n2
2-------- rd r'c+ ips+= =
Hip4nVcf
--------------r'crc----- Ipc
2
Ipp3--------- 8n2
2-------- rd r'c+ +=
Hic4nVcf
--------------r'crc----- Ips Ipc
Ipp3---------------–=
Hvcf4n
------r'crc----- Ips
Ipp-------=
vps4nVcf
--------------r'crc-----
Ips2 Ipc
2+
Ips2
Ips2 Ipc
2+
--------------------------------–
Ips2 Ipc
2+
-----------------------------------------------------------------------
ips4nVcf
--------------r'crc-----
IpsIpc
Ips2 Ipc
2+
32---
-------------------------------------
ipc–=
4n
------r'crc----- Ips
Ips2 Ipc
2+
------------------------------
vcf8n2
2-------- rd r'c+ ips+ +
vpsr'crc----- 4nVcf
--------------
Ipc2
Ipp3--------- ips
4nVcf
--------------Ips Ipc
Ipp3--------------- ipc–
4n
------IpsIpp------- vcf+
8n2
2-------- rd r'c+ ips+=
DS00001477B-page 12 2012-2018 Microchip Technology Inc.

AN1477
The cosine component of the transformer primaryvoltage (vpc) is linearized around the steady-stateoperating point, as shown in Equation 29.EQUATION 29: LINEARIZATION OF COSINE COMPONENT OF TRANSFORMER PRIMARY VOLTAGE
vpc4n
------ipcipp------abs vse 4n
------
r'crc-----
ipc
ips2 ipc
2+
------------------------------vcf8n2
2-------- rd r'c+ ipc+= =
Gip4nVcf
--------------r'crc----- Ips Ipc
Ipp3----------------–=
Gic4nVcf
--------------r'crc-----
Ips2
Ipp3--------- 8n2
2-------- rd r'c+ +=
Gvcf4n
------r'crc----- Ipc
Ipp-------=
vpc4nVcf
--------------–r'crc----- Ips Ipc
Ips2 Ipc
2+
32---
----------------------------------
ips4nVcf
--------------r'crc-----
Ips2 Ipc
2+
Ipc2
Ips2 Ipc
2+
------------------------------–
Ips2 Ipc
2+
-------------------------------------------------------------------
ipc+=
vpsr'crc----- 4nVcf
--------------
Ips Ipc
Ipp3---------------- ips–
4nVcf
--------------Ips
2
Ipp3----------- ipc
4n
------IpcIpp-------- vcf+ +
8n2
2-------- rd r'c+ ipc+=
4n
------r'crc----- Ipc
Ips2 Ipc
2+
------------------------------
vcf8n2
2-------- rd r'c+ ipc+ +
2012-2018 Microchip Technology Inc. DS00001477B-page 13

AN1477
The linearization of the input voltage (ves) is shown inEquation 30.EQUATION 30: LINEARIZATION OF HALF-BRIDGE INVERTER OUTPUT VOLTAGE
Removing the steady-state terms and other higherorder perturbed terms in Equation 30 to get thelinearized input voltage, as shown in Equation 31.
EQUATION 31: LINEARIZATION OF HALF-BRIDGE INVERTER OUTPUT VOLTAGE
The linearization and perturbation of the tank current,capacitor voltage, transformer primary voltage, outputvoltage and output filter capacitor voltage, after remov-ing the second order and DC terms, are provided inEquation 32 through Equation 43.
In resonant converters, the poles and zeroes arethe functions of normalized switching frequency(sn = s/0), where s is the switching frequencyand 0 is the resonant frequency.
The linearization and perturbation of the sine componentof the tank voltage is provided in Equation 32.
EQUATION 32: LINEARIZATION OF SINE COMPONENT OF TANK VOLTAGE
ves2vin
---------- 2---d sin=
Ves ves+2--- Vin vin+
2--- D d+ sin=
Expanding 2--- D d+ sin
2---D
2---d cossin=
2---D cos
2--- d sin+
2---D sin=
2---
2---D dcos+
Ves ves+2--- Vin vin+
2---D sin
2---2---D dcos+
=
ves2---
2---D vinsin Vin
2---D dcos+=
ves K1vin K2d+=
Where:
K12---
2---D sin=
K2 Vin2---D cos=
Lsd Is is+
dt---------------------- rs Is is+ Ls Ic ic+ s 0s
0-------+
Vs vs+ Vps vps+ + + + + Ves ves+ =
Lsdisdt------- rsis sLsic Ls0Icsn vs vps+ + + + + ves=
DS00001477B-page 14 2012-2018 Microchip Technology Inc.

AN1477
Substitute the values of Equation 28 and Equation 31into the sine component of the tank voltage, as shownin Equation 33.EQUATION 33: LINEARIZATION OF SINE COMPONENT OF TANK VOLTAGE
The linearization and perturbation of the cosinecomponent of tank voltage is provided in Equation 34.
EQUATION 34: LINEARIZATION OF COSINE COMPONENT OF TANK VOLTAGE
Substituting the values of Equation 29 into the cosinecomponent of the tank voltage, the result obtained isshown in Equation 35.
EQUATION 35: LINEARIZATION OF COSINE COMPONENT OF TANK VOLTAGE
The linearization and perturbation of the sine componentof the tank current is provided in Equation 36.
EQUATION 36: LINEARIZATION OF SINE COMPONENT OF TANK CURRENT
The linearization and perturbation of the cosinecomponent of the tank current is provided inEquation 37.
EQUATION 37: LINEARIZATION OF COSINE COMPONENT OF TANK CURRENT
Lsdisdt------- rsis sLsic Ls0Icsn vs Hipis Hicic Hipims– Hicimc– HvcfVcf+ + + + + + + K1vin K2d+=
Lsdisdt------- Hip rs+ is– sLs Hic+ ic– vs– Hipims Hicimc HvcfVcf– K1vin K2d Ls0Icsn–+ + + +=
disdt-------
Hip rs+
Ls--------------------
is–sLs Hic+
Ls-----------------------------
ic–1Ls----- vs–
HipLs
--------- imsHicLs
--------- imcHvcf
Ls------------Vcf–
K1Ls------- vin
K2Ls------- d
Ls0IcLs
------------------sn–+ + + +=
Lsd Ic ic+
dt---------------------- rs Ic ic+ Ls Is is+ s 0s0------+
– Vc vc+ Vpc vpc+ + + + 0=
Lsdicdt------- rsic+
sLsis Ls0Issn vc vpc+ + + + 0=– –
Lsdicdt------- rs ic+
sLsis Ls0 Issn vc Gipis Gicic Gipims– Gicimc– Gvcfvcf+ + + + + + 0=
Lsdicdt------- sLs Gip– is Gic rs+ ic– vc– Gipims Gicimc Gvcfvcf
– Ls0Issn+ + +=
dicdt-------
sLs Gip– Ls
------------------------------- isGic rs+
Ls----------------------- ic–
1Ls----- vc–
GipLs
-------- imsGicLs-------- imc
GvcfLs
----------- vcf–
Ls0Is
Ls-----------------sn+ + +=
– –
ic
Csdvsdt-------- Cssvc Cs0Vcsn is=+ +
Csd Vs vs+
dt------------------------- Cs Vc vc+ s 0
s0-------+
+ Is is+ =
dvsdt-------- 1
Cs------ is
CssCs
------------- vc–Cs0Vc
Cs--------------------sn–=
Csdvcdt-------- Cssvs–
Cs0Vcsn– ic=
dvcdt-------- 1
Cs------ is
Css
Cs------------- vs
Cs0VsCs
--------------------sn+ +=
Cs
d Vc vc+
dt-------------------------- Cs Vs vs+ s 0s0-------+
– Ic ic+ =
ic
2012-2018 Microchip Technology Inc. DS00001477B-page 15

AN1477
The linearization and perturbation of the sine componentof the magnetizing current is provided in Equation 38.EQUATION 38: LINEARIZATION OF SINE COMPONENT OF MAGNETIZING CURRENT
Substituting the value of Equation 28 into the sine com-ponent of the transformer primary voltage, the resultsare shown in Equation 39.
EQUATION 39: LINEARIZATION OF SINE COMPONENT OF MAGNETIZING CURRENT
The linearization and perturbation of the cosinecomponent of the tank voltage is provided inEquation 40.
EQUATION 40: LINEARIZATION OF COSINE COMPONENT OF MAGNETIZING CURRENT
Substituting Equation 29 into the cosine component ofthe magnetizing current, the result is shown inEquation 41.
EQUATION 41: LINEARIZATION OF COSINE COMPONENT OF MAGNETIZING CURRENT
Lmdims
dt------------ Lmsimc LmImc0sn+ + vps=
Lmd Ims ims+
dt-------------------------------- Lm Imc imc+ s 0s0-------+
+ Vps vps+ =
Lmdims
dt------------ Lmsimc LmImc0sn+ + Hipis Hicic Hipims– Hicimc– Hvcf vcf+ +=
Lmdims
dt------------ Hipis Hicic Hipims– Hic Lms+ imc– Hvcf vcf LmImc0sn–+ +=
dimsdt------------
HipLm--------- is
HicLm--------- ic
HipLm--------- ims–
Hic Lms+
Lm----------------------------------- imc–
HvcfLm
------------ vcfLmImc0
Lm------------------------- sn–+ +=
Lmdimc
dt------------ Lmsims– LmIms0sn– vpc=
Lmd Imc imc+
dt--------------------------------- Lm Ims ims+ s 0s0-------+
– Vpc vpc+ =
dimcdt------------
GipLm--------- is
GicLm--------- ic
Gip Lms–
Lm----------------------------------- ims–
GicLm--------- imc–
GvcfLm---------- vcf
LmIms0Lm
------------------------- sn+ + +=
Lmdimcdt----------- Lmsims– LmIms0sn– Gip is Gicic Gip ims– Gic imc– Gvcf vcf+ +=
ic
DS00001477B-page 16 2012-2018 Microchip Technology Inc.

AN1477
The linearization and perturbation of the output filtercapacitor voltage is provided in Equation 42.EQUATION 42: LINEARIZATION OF OUTPUT CAPACITOR VOLTAGE
1rcR-----+
Cf
dvcfdt---------- 1
R---+ vcf2--- isp=
1rcR-----+
Cf
d Vcfvcf
+
dt------------------------------ 1R--- Vcf
vcf+
+2--- Isp isp+ =
From Equation 16:2---isp
2n
------ ips2 ipc
2+=
2--- isp
2n
------Ips
Ips2 Ipc
2+
--------------------------------- ips2n
------Ipc
Ips2 Ipc
2+
--------------------------------- ipc+=
Kisips Kicipc+
2--- isp Kisis Kicic Kisims– Kicimc–+=
1rcR-----+
Cf
dvcfdt---------- Kisis= Kicic Kisims– Kicimc–
1R--- vcf
–+
ips is ims–= ipc ic imc–=
Where:
rcr'c------Cf
dvcfdt
----------+ Kisis Kicic Kisims– Kicimc–1R--- vcf
–+=
dvcfdt----------
Kis r'cCf rc
--------------- isKis r'cCf rc
--------------- icKis r'cCf rc
--------------- ims–Kicr'cCf rc
--------------- imc–r'c
RCf rc--------------- vcf
–+=
Kis2n
------Ips
Ips2 Ipc
2+
---------------------------------=
and
Kic2n
------Ipc
Ips2 Ipc
2+
---------------------------------=and
ic
2012-2018 Microchip Technology Inc. DS00001477B-page 17

AN1477
The linearization and perturbation of the output voltageis provided in Equation 43.EQUATION 43: LINEARIZATION OF OUTPUT VOLTAGE
Equation 32 through Equation 43 are arranged, asshown in Equation 44.
EQUATION 44: LINEARIZED SMALL SIGNAL MODEL OF LLC RESONANT CONVERTER
V0 v0+2---r'c Isp isp+
r'crc------
Vcfvcf
+ +=
v0 2---r'cisp
r'crc------
vcf+=
v0 r'c Kisis Kicic Kisims– Kicimc–+ r'crc------
vcf+=
v0 Kisr'cis Kicr'cic Kisr'cims– Kicr'ciˆmc–+
r'crc------
vcf+=
disdt-------
Hip rs+
Ls--------------------
is–sLs Hic+
Ls-----------------------------
ic–1
Ls----- vs–
HipLs
--------- imsHicLs
--------- imc
HvcfLs
------------ vcf–K1Ls------- vin
K2Ls------- d
Ls0IcLs
------------------ sn–+ + + +=
dicdt-------
sLs Gip–
Ls--------------------------------- is
Gic rs+
Ls------------------------- ic–
1Ls----- vc–
GipLs
--------- imsGicLs
--------- imcGvcf
Ls------------ vcf–
Ls0IsLs
------------------sn+ + +=
dvsdt-------- 1
Cs------ is
CssCs
-------------- vc–Cs0
Vc
Cs--------------------sn–=
dvcdt-------- 1
Cs------ ic
CssCs
-------------- vs
Cs0Vs
Cs--------------------sn+ +=
dimsdt------------
HipLm--------- is
HicLm--------- ic
HipLm--------- ims–
Hic Lms+
Lm------------------------------- imc–
HvcfLm
------------ vcf
LmImc0Lm
------------------------- sn–+ +=
dimcdt------------
GipLm--------- is
GicLm--------- ic
Gip Lms–
Lm----------------------------------- ims–
GicLm--------- imc–
GvcfLm
------------ vcf
LmIms0Lm
------------------------- sn+ + +=
The output equation is:
v0 Kis r'c is Kic r'c ic Kis r'c ims– Kic r'c imc–r'crc------
vcf+ +=
dVCfdt-------------
Kis r'cCf rc
--------------- isKic r'cCf rc
--------------- icKis r'cCf rc
--------------- ims–Kic r'cCf rc
--------------- imc–r'c
RCf rc--------------- vcf–+=
DS00001477B-page 18 2012-2018 Microchip Technology Inc.

AN1477
Formation of State-Space ModelState-space representation is a mathematical model ofa physical system as a set of input, output and statevariables, related by first order differential equations.Additionally, if the dynamic system is linear and timeinvariant, the differential and algebraic equations maybe written in matrix form.
The state-space representation (known as time domainapproach) provides a convenient and compact way tomodel and analyze systems with multiple inputs andoutputs.
Equation 45 provides the state-space representation ofthe LLC resonant converter.
EQUATION 45: STATE-SPACE MODEL OF LLC RESONANT CONVERTER
A
Hip rs+
Ls--------------------–
sLs Hic+
Ls---------------------------------–
1Ls-----– 0
HipLs
---------HicLs
---------Hvcf
Ls------------–
sLs Gip–
Ls---------------------------------
Gic rs+
Ls--------------------– 0 1
Ls-----–
GipLs
---------GicLs
---------Gvcf
Ls------------–
1Cs------ 0 0
CssCs
--------------– 0 0 0
0 1Cs------
CssCs
-------------- 0 0 0 0
HipLm---------
HicLm--------- 0 0
HipLm---------–
Hic Lms+
Lm-------------------------------–
HvcfLm
------------
GipLm---------
GicLm--------- 0 0
Gip Lms–
Lm-------------------------------–
GicLm---------–
GvcfLm
------------
Kisr'cCf rc
---------------Kicr'cCf rc
--------------- 0 0Kisr'cCf rc
---------------–Kicr'cCf rc
---------------–r'c
RCf rc---------------–
=
D 0=
C Kisr'c Kicr'c 0 0 Kisr'c– Kicr'c– r'crc------
=
For the linearized system, the required control-to-output voltage transfer function is:
v0
sn---------- C SI A–
1– B D+ Gp s = =
dxdt------ Ax Bu+=
y Cx Du+=
Where:
x is ic vs vc ims imc vcf T
= States of the system
u fsn or sn = Control inputs and all other disturbance inputs are ignored
y v0 = Output
B 0Ic– 0Is 0Vc– 0Vs 0Imc– 0Ims 0 T=
2012-2018 Microchip Technology Inc. DS00001477B-page 19

AN1477
HARDWARE DESIGN SPECIFICATIONSSeries resonant inductor (Ls) = 62 µH
Series resonant capacitance (Cs) = 9.4 nF
Magnetizing inductor (Lm) = 268 µH
Input voltage (Vin) = 400V (DC)
Output filter capacitance (Cf ) = 2000 µF
Output power = 200W
Switching frequency (fs) = 200 kHz
DCR of resonant inductor (rs) = 15 mΩ
ESR of output capacitor (rc) = 15 mΩ
Secondary MOS resistor (rd) = 0.725 mΩ
Equation 45 can be solved using MATLAB® to obtainthe control-to-output (plant) transfer function,sys = ss(A, B, C, D). The ss command arranges theA, B, C and D matrices in a state-space model. TheGp(s) = tf(sys) command gives the transfer functionof the system, where sys indicates the system. Theplant transfer function order is reduced by neglectingthe poles and zeros having frequency higher than theswitching frequency. The reduced order plant transferfunction (Gp(s)), along with the design values, areshown in Equation 46.
EQUATION 46: PLANT TRANSFER FUNCTION
The general form of Gp(s) is shown in Equation 47.
EQUATION 47: GENERALIZED FORM OF PLANT TRANSFER FUNCTION
The [p, z] = pzmap (Gp(s)) command gives thepoles and zeros of the plant transfer function.Figure 7 illustrates the pole-zero plot for the Gp (s),which is obtained from the MATLAB command,pzmap (Gp(s)). Figure 7 shows dominant poles andzero of Equation 46, excluding RHP zero and high-frequency poles. Figure 8 illustrates the Bode plotobtained using MATLAB for detail plant transfer functionand reduced order plant transfer function.
Gp s 40311827883 s 1.98 105
+ s 6.711 105–
s2 4.102 104 s 7.937+ 108
+ s2 2.697+ 105s 1.05 1012+
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------=
Gp s
6.4275 s
1.98 105
-------------------------- 1+ s
6.711 105
----------------------------- 1–
s2
7.937 108
----------------------------- 4.102 104
7.937 108
-----------------------------s 1+ +s2
1.05 1012
----------------------------- 2.697 105
1.05 1012
-----------------------------s 1+ +
---------------------------------------------------------------------------------------------------------------------------------------------------------------------------=
Gp s
Gpo 1 sesr------------+
sRHP---------------- 1–
s2
p12---------- s
Q1 p1------------------------ 1+ +
s2
p22---------- s
Q2 p2------------------------ 1+ +
------------------------------------------------------------------------------------------------------------------------=
DS00001477B-page 20 2012-2018 Microchip Technology Inc.

AN1477
FIGURE 7: POLE-ZERO MAP OF PLANT TRANSFER FUNCTIONFIGURE 8: SIMULATED BODE DIAGRAM OF PLANT TRANSFER FUNCTION
-2.5 -2 -1.5 -1 -0.5 0 0.5x 105
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5x 104
Real Axis
Imag
inar
y A
xis
Pole-Zero Map of Plant (excluding RHP zero and high frequency poles)
-20500+j19300
-20500-j19300
-198000
-
-80
-60
-40
-20
0
20
Mag
nitu
de (d
B)
102 103 104 105 106-270
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (Hz)
PlantReduce order Plant
2012-2018 Microchip Technology Inc. DS00001477B-page 21

AN1477
Digital Compensator Design for LLC Resonant ConverterThe plant model is derived as shown in Equation 46. Inorder to attain the desired gain margin, phase marginand crossover frequency, a digital 2P2Z compensatoris designed. The digital 2P2Z compensator is derivedusing the design by emulation or digital redesignapproach.In this method, an analog compensator is first designedin the continuous time domain and then converted todiscrete time domain using bilinear or tustin transfor-mation. Figure 9 illustrates the block diagram of theLLC resonant converter with a digital compensator.
After deriving a plant model, the controller designprocess starts with derivation of open-loop gain to getthe desired phase margin and crossover frequency forthe specified performance of the closed-loop system.The block diagram in Figure 10 shows the system incontinuous time domain. The block diagram of Figure 10can be simplified in terms of per unit system, using1/Vbase gain in the forward path of the closed-loop sys-tem, where Vbase = 3.3/KS. Figure 11 shows the per unitblock diagram. Vbase is an essential gain to considerwhile designing the controller. Figure 10 and Figure 11are used only to design the controller in continuous timedomain. In the digital implementation, the controlleroutput is period instead of normalized frequency.
FIGURE 9: BLOCK DIAGRAM OF LLC RESONANT CONVERTER
FIGURE 10: CLOSED-LOOP CONTROL BLOCK DIAGRAM IN CONTINUOUS TIME DOMAIN
FIGURE 11: SIMPLIFIED CLOSED-LOOP CONTROL BLOCK DIAGRAM IN PER UNIT INCLUDING Vbase
–
2P2ZCompensator
Numerically
KA/D GPFC
A/D
VREF[n] + F(t)
Resonant Converter
Voltage Sensor
ControlledOscillator
e[n] Vc[n] Vo[t]
Vm[n]
–
VREF +
Sensor Gain ADC Gain
Ks
Ks GLPF (s)
Gp (s)Gc (s)VOUT
LLC PlantController
LP FilterSensor GainADC Gain
ωsn13.3
13.3
–
VREF +
GLPF (s)
GP (s)Gc(s)VOUT
LLC PlantController
LP Filter
1Vbase
DS00001477B-page 22 2012-2018 Microchip Technology Inc.

AN1477
As seen from Equation 47, plant transfer functionconsists of an ESR zero and a pair of dominant complexpoles. In order to compensate for the effect of ESR zero(increased high-frequency gain, and thereby, increasedripple), a pole (ωp) is included in the compensator. Inorder to minimize the steady-state error, an integrator(Kc) is also added to the compensator.Furthermore, in order to compensate for the effect ofthe complex dominant poles (reduction in systemdamping, and hence, increased overshoots and set-tling time), two zeros, (s + + j) and (s + – j), areadded.
Effectively, the system will have a 2-Pole 2-Zero (2P2Z)compensator in continuous domain, as shown inEquation 48.
EQUATION 48: COMPENSATOR GC(s) IN CONTINUOUS TIME DOMAIN
One of the digital compensator poles (ωp = 2πfp) isplaced at fp to cancel the ESR zero due to output filtercapacitor ESR (fesr = ωesr/2π).
Kc represents the integral gain of the compensator andis adjusted to achieve the desired crossover frequencyof the system.
A pair of complex zeros of the compensator, on thecomplex s-plane, is at s1 = –α + jβ and s2 = –α – jβ. Thecompensator zero frequency magnitude (ωz) is 2πfz.The frequency (fz) is chosen slightly below or equal tothe corner frequency of the dominant resonantpoles (ωp1) to provide the necessary phase lead. Thecompensator quality factor (Qc) is chosen to be compa-rable, or equal to, the dominant complex pole pairquality factor (Q1) of the plant transfer function at themaximum load current. For this analysis, computationaldelay is ignored. The computational delay is, however,considered in the model loop gain while comparing themodel predicted loop gain with experimentally obtainedloop gain.
If the desired crossover frequency is denoted as (fc),then ωc = j2πfc.
At crossover frequency, the loop gain of the systemshould be zero dB or one on linear scale, as shown inEquation 49.
EQUATION 49: COMPENSATOR GAIN CALCULATION
The compensator first pole (ωp) is placed at 198k rad/secand the complex pair of zeros is placed at 25k rad/sec.The resulting compensator for a crossover frequency of10.5 kHz is shown in Equation 50.
EQUATION 50: COMPENSATOR TRANSFER FUNCTION
Gc s
Kcs2
z2------- s
Qc z-------------------- 1+ +
s sp------- 1+
--------------------------------------------------------------=
Gc s Kc z
2 s j+ + s j–+
s sp------- 1+
----------------------------------------------------------------------------------------=
Gp s s c=
Gc s s c=
1=
Kc1
Gp s s c=
--------------------------------- 1Gc s
s c=
--------------------------------- Vbase=
The required gain of the compensator is:
Gc s 36.97 s2 3.714 104
s 6.292 108+ +
s s 1.98 105+
-------------------------------------------------------------------------------------------------------=
2012-2018 Microchip Technology Inc. DS00001477B-page 23

AN1477
The [p, z] = pzmap (Gc (s)) command gives the polesand zeros of the compensator. Figure 12 illustrates thepole-zero plot for a Gc.Figure 13 illustrates the simulated Bode plot of loopgain with designed compensator.
FIGURE 12: POLE-ZERO MAP OF COMPENSATOR
FIGURE 13: SIMULATION BODE DIAGRAM OF LOOP GAIN
-2.5 -2 -1.5 -1 -0.5 0 0.5x 105
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5x 104
Real Axis
Imag
inar
y A
xis
Pole-Zero Map of Compensator
-20500+j19300
-20500-j19300
-198000 0
-80
-60
-40
-20
0
20
40
Mag
nitu
de (d
B)
102 103 104 105 106-360-270-180-90
090
180270360
Phas
e (d
eg)
Bode DiagramGm = 6.38 dB (at 2.16e+004 Hz) , Pm = 47.1 deg (at 1.05e+004 Hz)
Frequency (Hz)
DS00001477B-page 24 2012-2018 Microchip Technology Inc.

AN1477
The discrete compensator transfer function (Gc_d) isobtained using the tustin or bilinear transformation witha sampling frequency of 200 kHz, as shown inEquation 51. Another method to design and implementthe controller is discussed in the “Appendix” section.EQUATION 51: COMPENSATOR TRANSFER FUNCTION IN DISCRETE DOMAIN
Figure 14, Figure 15 and Figure 16 show the compari-son of simulated and measured loop gain plots for100%, 50% and 10% load conditions, respectively. Apractical delay of 8.55 µs is produced due to digitalcompensator implementation, which is added insimulation loop gain plots.
FIGURE 14: COMPARISON OF SIMULATION AND MEASURED LOOP GAIN FOR FULL LOAD
27.12z2 49.26z– 22.53+
z2 1.338z– 0.3378+-------------------------------------------------------------Gc_d (z) =
102 103 104 105-60
-40
-20
0
20
40
Gain Plot
Gain (dB)
102 103 104 105-180
0
180
360Phase Plot
Phase (Degree)
Frequency (Hz)
SimulationExperimental
2012-2018 Microchip Technology Inc. DS00001477B-page 25

AN1477
FIGURE 15: COMPARISON OF SIMULATION AND MEASURED LOOP GAIN FOR 50% LOAD102 103 104 105-60
-40
-20
0
20
40
Gain Plot
Gain (dB)
102 103 104 105-180
0
180
360Phase Plot
Phase (Degree)
Frequency (Hz)
SimulationExperimental
DS00001477B-page 26 2012-2018 Microchip Technology Inc.

AN1477
FIGURE 16: COMPARISON OF SIMULATION AND MEASURED LOOP GAIN FOR 10% LOADTable 1 shows the comparison of measured and simu-lated phase margin and crossover frequency for 100%,50% and 10% load conditions.
102 103 104 105-60
-40
-20
0
20
40
Gain PlotGain (dB)
102 103 104 105-180
0
180
360Phase Plot
Phase (Degree)
Frequency (Hz)
SimulationExperimental
TABLE 1: COMPARISON OF SIMULATION AND MEASURED CROSSOVER FREQUENCY AND PHASE MARGIN FOR DIFFERENT LOADS
LoadCrossover Frequency (Hz) Phase Margin (Degree)
Simulation Experimental Simulation Experimental
10% 11489 12000 44.03 42.950% 11232 11900 39.43 41
100% 9582 10500 45.11 47.1
2012-2018 Microchip Technology Inc. DS00001477B-page 27

AN1477
CONCLUSIONPulse Frequency Modulated LLC resonant converterplant transfer function is derived by employing the EDF. Adigital compensator is designed to get an open-loop gainof a closed-loop system with a very high crossoverfrequency of ~10 kHz and a phase margin of~45 degrees. The hardware results are in conformity tothe developed analytical model and also meet the targetspecifications.
APPENDIXAnother commonly used design methodology involves acompensator designed in a continuous time domain,precluding the effects of an ADC, sensor and PWMgenerator. However, while implementing the digital com-pensator, the gains due to these blocks are evaluatedand an inverse gain is multiplied to the compensator tonullify their effect. This way, the implemented loop gainis equivalent to the designed loop gain in continuoustime domain. In other words, while implementing thedigital controller, calculate the combined gain offered bythe ADC gain, sensor gain and PWM gain, and multiplythe inverse of the gain with the continuous time domainequation. Then, convert it in a discrete time domain con-troller (G’c(s)) using bilinear or tustin transformation.Compensator G’c(s) is shown in Equation 52. Calcula-tion of compensator gain, K’c, is given in Equation 53.Figure 17 shows a block diagram that explains thismethod. Here, controller G’c(s) is multiplied with gainconstant, K, which is derived in Equation 54.
EQUATION 52: COMPENSATOR G’C (s) IN CONTINUOUS TIME DOMAIN
EQUATION 53: COMPENSATOR GAIN K’C CALCULATION
EQUATION 54: GAIN CONSTANT K MULTIPLIED WITH CONTROLLER
FIGURE 17: SIMPLIFIED CLOSED-LOOP CONTROL BLOCK DIAGRAM
G'c s
K'cs2
z2
------- sQc z-------------------- 1+ +
s sp------- 1+
---------------------------------------------------------------=
G'c s K'c z
2 s j+ + s j–+
s sp------- 1+
-----------------------------------------------------------------------------------------=
Gp s s c=
G'c s s c=
1=
K'c1
Gp s s c=
--------------------------------- 1G'c s
s c=
----------------------------------=
The required gain of the compensator is:
K 3.3Ks-------
Pbase
2n-------------=
Where:n = ADC bits
Pbase = Period corresponds to the base frequency of LLC converter
–
+
GLPF (s)
GP (s)G’c (s) K VOUT
LLC PlantController
LP Filter
Vref2n
3.3------- Ks
ADC Gain Sensor Gain
Ks
ωsn
2n
3.3
DS00001477B-page 28 2012-2018 Microchip Technology Inc.

AN1477
REFERENCES• “Topology Investigation for Front End DC/DC
Power Conversion for Distributed Power Systems”, by Bo Yang, Dissertation, Virginia Polytechnic Institute and State University, 2003.
• “Small-Signal Analysis for LLC Resonant Converter”, by Bo Yang and F.C. Lee, CPES Seminar, 2003, S7.3, Pages: 144-149.
• “Small-Signal Modeling of Series and Parallel Resonant Converters”, by Yang, E.X.; Lee, F.C.; Jovanovich, M.M., Applied Power Electronics Conference and Exposition, 1992. APEC' 92. Conference Proceedings 1992, Seventh Annual, 1992, Page(s): 785-792.
• “Approximate Small-Signal Analysis of the Series and the Parallel Resonant Converters”, by Vorperian, V., Power Electronics, IEEE Transactions on, Vol. 4, Issue 1, January 1989, Page(s): 15-24.
• “DC/DC LLC Reference Design Using the dsPIC® DSC” (AN1336)
LIST OF PARAMETERS
TABLE 2: LIST OF PARAMETERS AND DESCRIPTION
Parameter Description
Ir Resonant tank currentVc Resonant tank capacitor voltageIm Magnetizing currentVcf Output capacitor voltagev’cf Reflected output capacitor voltage
on primary sideIsp Transformer secondary currentIis Sine component of resonant tank
currentIic Cosine component of resonant tank
currentVcs Sine component of resonant tank
capacitor voltageVcc Cosine component of resonant tank
capacitor voltageIms Sine component of magnetizing
currentImc Cosine component of magnetizing
currentIss Sine component of transformer
secondary currentIsc Cosine component of transformer
secondary currentVes Sine component of half-bridge
inverter output voltageVec Cosine component of half-bridge
inverter output voltageIps Sine component of transformer
primary currentIpc Cosine component of transformer
primary currentIpp Total primary current of transformerVps Sine component of transformer
primary voltageVpc Cosine component of transformer
primary voltagen Transformer turns ratio
2012-2018 Microchip Technology Inc. DS00001477B-page 29

AN1477
NOTES:DS00001477B-page 30 2012-2018 Microchip Technology Inc.

Note the following details of the code protection feature on Microchip devices:• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of ourproducts. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such actsallow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding deviceapplications and the like is provided only for your convenienceand may be superseded by updates. It is your responsibility toensure that your application meets with your specifications.MICROCHIP MAKES NO REPRESENTATIONS ORWARRANTIES OF ANY KIND WHETHER EXPRESS ORIMPLIED, WRITTEN OR ORAL, STATUTORY OROTHERWISE, RELATED TO THE INFORMATION,INCLUDING BUT NOT LIMITED TO ITS CONDITION,QUALITY, PERFORMANCE, MERCHANTABILITY ORFITNESS FOR PURPOSE. Microchip disclaims all liabilityarising from this information and its use. Use of Microchipdevices in life support and/or safety applications is entirely atthe buyer’s risk, and the buyer agrees to defend, indemnify andhold harmless Microchip from any and all damages, claims,suits, or expenses resulting from such use. No licenses areconveyed, implicitly or otherwise, under any Microchipintellectual property rights unless otherwise stated.
2012-2018 Microchip Technology Inc.
Microchip received ISO/TS-16949:2009 certification for its worldwide headquarters, design and wafer fabrication facilities in Chandler and Tempe, Arizona; Gresham, Oregon and design centers in California and India. The Company’s quality system processes and procedures are for its PIC® MCUs and dsPIC® DSCs, KEELOQ® code hopping devices, Serial EEPROMs, microperipherals, nonvolatile memory and analog products. In addition, Microchip’s quality system for the design and manufacture of development systems is ISO 9001:2000 certified.
QUALITY MANAGEMENT SYSTEM CERTIFIED BY DNV
== ISO/TS 16949 ==
TrademarksThe Microchip name and logo, the Microchip logo, AnyRate, AVR, AVR logo, AVR Freaks, BitCloud, chipKIT, chipKIT logo, CryptoMemory, CryptoRF, dsPIC, FlashFlex, flexPWR, Heldo, JukeBlox, KeeLoq, Kleer, LANCheck, LINK MD, maXStylus, maXTouch, MediaLB, megaAVR, MOST, MOST logo, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, Prochip Designer, QTouch, SAM-BA, SpyNIC, SST, SST Logo, SuperFlash, tinyAVR, UNI/O, and XMEGA are registered trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.ClockWorks, The Embedded Control Solutions Company, EtherSynch, Hyper Speed Control, HyperLight Load, IntelliMOS, mTouch, Precision Edge, and Quiet-Wire are registered trademarks of Microchip Technology Incorporated in the U.S.A.Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, BodyCom, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial Programming, ICSP, INICnet, Inter-Chip Connectivity, JitterBlocker, KleerNet, KleerNet logo, memBrain, Mindi, MiWi, motorBench, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, SAM-ICE, Serial Quad I/O, SMART-I.S., SQI, SuperSwitcher, SuperSwitcher II, Total Endurance, TSHARC, USBCheck, VariSense, ViewSpan, WiperLock, Wireless DNA, and ZENA are trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.Silicon Storage Technology is a registered trademark of Microchip Technology Inc. in other countries.GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of Microchip Technology Inc., in other countries. All other trademarks mentioned herein are property of their respective companies.© 2018, Microchip Technology Incorporated, All Rights Reserved.
ISBN: 978-1-5224-3845-8
DS00001477B-page 31

DS00001477B-page 32 2012-2018 Microchip Technology Inc.
AMERICASCorporate Office2355 West Chandler Blvd.Chandler, AZ 85224-6199Tel: 480-792-7200 Fax: 480-792-7277Technical Support: http://www.microchip.com/supportWeb Address: www.microchip.comAtlantaDuluth, GA Tel: 678-957-9614 Fax: 678-957-1455Austin, TXTel: 512-257-3370 BostonWestborough, MA Tel: 774-760-0087 Fax: 774-760-0088ChicagoItasca, IL Tel: 630-285-0071 Fax: 630-285-0075DallasAddison, TX Tel: 972-818-7423 Fax: 972-818-2924DetroitNovi, MI Tel: 248-848-4000Houston, TX Tel: 281-894-5983IndianapolisNoblesville, IN Tel: 317-773-8323Fax: 317-773-5453Tel: 317-536-2380Los AngelesMission Viejo, CA Tel: 949-462-9523Fax: 949-462-9608Tel: 951-273-7800 Raleigh, NC Tel: 919-844-7510New York, NY Tel: 631-435-6000San Jose, CA Tel: 408-735-9110Tel: 408-436-4270Canada - TorontoTel: 905-695-1980 Fax: 905-695-2078
ASIA/PACIFICAustralia - SydneyTel: 61-2-9868-6733China - BeijingTel: 86-10-8569-7000 China - ChengduTel: 86-28-8665-5511China - ChongqingTel: 86-23-8980-9588China - DongguanTel: 86-769-8702-9880 China - GuangzhouTel: 86-20-8755-8029 China - HangzhouTel: 86-571-8792-8115 China - Hong Kong SARTel: 852-2943-5100 China - NanjingTel: 86-25-8473-2460China - QingdaoTel: 86-532-8502-7355China - ShanghaiTel: 86-21-3326-8000 China - ShenyangTel: 86-24-2334-2829China - ShenzhenTel: 86-755-8864-2200 China - SuzhouTel: 86-186-6233-1526 China - WuhanTel: 86-27-5980-5300China - XianTel: 86-29-8833-7252China - XiamenTel: 86-592-2388138 China - ZhuhaiTel: 86-756-3210040
ASIA/PACIFICIndia - BangaloreTel: 91-80-3090-4444 India - New DelhiTel: 91-11-4160-8631India - PuneTel: 91-20-4121-0141Japan - OsakaTel: 81-6-6152-7160 Japan - TokyoTel: 81-3-6880- 3770 Korea - DaeguTel: 82-53-744-4301Korea - SeoulTel: 82-2-554-7200Malaysia - Kuala LumpurTel: 60-3-7651-7906Malaysia - PenangTel: 60-4-227-8870Philippines - ManilaTel: 63-2-634-9065SingaporeTel: 65-6334-8870Taiwan - Hsin ChuTel: 886-3-577-8366Taiwan - KaohsiungTel: 886-7-213-7830Taiwan - TaipeiTel: 886-2-2508-8600 Thailand - BangkokTel: 66-2-694-1351Vietnam - Ho Chi MinhTel: 84-28-5448-2100
EUROPEAustria - WelsTel: 43-7242-2244-39Fax: 43-7242-2244-393Denmark - CopenhagenTel: 45-4450-2828 Fax: 45-4485-2829Finland - EspooTel: 358-9-4520-820France - ParisTel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79 Germany - GarchingTel: 49-8931-9700Germany - HaanTel: 49-2129-3766400Germany - HeilbronnTel: 49-7131-67-3636Germany - KarlsruheTel: 49-721-625370Germany - MunichTel: 49-89-627-144-0 Fax: 49-89-627-144-44Germany - RosenheimTel: 49-8031-354-560Israel - Ra’anana Tel: 972-9-744-7705Italy - Milan Tel: 39-0331-742611 Fax: 39-0331-466781Italy - PadovaTel: 39-049-7625286 Netherlands - DrunenTel: 31-416-690399 Fax: 31-416-690340Norway - TrondheimTel: 47-7288-4388Poland - WarsawTel: 48-22-3325737 Romania - BucharestTel: 40-21-407-87-50Spain - MadridTel: 34-91-708-08-90Fax: 34-91-708-08-91Sweden - GothenbergTel: 46-31-704-60-40Sweden - StockholmTel: 46-8-5090-4654UK - WokinghamTel: 44-118-921-5800Fax: 44-118-921-5820
Worldwide Sales and Service
08/15/18