Embed Size (px)
Citation preview

CONTROL SYSTEMS
Compensators
Dr. S. SUMATHI
Associate Professor
RNSIT
Bengaluru
5/31/2019 1

5/31/2019 2
COMPENSATORS
Compensators are subsystems introduced into the system to meet design
specifications
The desired behavior of the system is specified in terms of transient
measures and the steady state error.
Compensation may Cascaded or Feedback

5/31/2019 3
COMPENSATORS
Compensators are of three types
1. Lead Compensator
2. Lag Compensator
3. Lead -Lag Compensator

5/31/2019 4
Lead Compensator
Lead compensators have a transfer function of the form
Pole is located to the left of zero (zero near origin)
Lead Compensator
improves transient response
increases stability margin
increases system error constant by limited range

5/31/2019 5
Lag Compensator
Lag compensators have a transfer function of the form
Pole is located to the right of zero (pole near origin)
Lag Compensator
improves steady state behavior
preserves transient response

5/31/2019 6
Lag-Lead Compensator
Lag-Lead compensators have a transfer function of the form
Lag-Lead Compensator is a combination lag compensator
and lead compensator connected in series

5/31/2019 7
Lead Compensator
It has a zero at s=-1/ꞇ and pole at s=-1/αꞇ with zero
closer to origin

5/31/2019 8
Lead compensator can be realized by an electrical network

5/31/2019 9
The DC attenuation caused by α can be compensated
by an amplifier connected in cascade. Therefore the
sinusoidal transfer function is

5/31/2019 10
Since α < 1, the output leads the input under steady state condition
hence the name lead compensator.
The frequency ωm at which maximum phase shift occurs is given by
the solution
ωm is the geometric mean of the two corner frequencies

5/31/2019 11
The maximum phase lead φm is given by
Therefore
Cross multiplying and solving

5/31/2019 12
The magnitude of Gc(jω) at ω=ωm is
The magnitude of Gc(jω) at ω=ωm in decibels is

5/31/2019 13

5/31/2019 14
Design of Lead compensator
Specifications: System error constant and Phase margin
STEP 1: Determine the open loop gain K required to satisfy
the specified error constant
STEP 2: Using this value of K draw the magnitude and
phase Bode plots.
Determine the phase margin, (φpm1) and
gain crossover frequency (ωg1)
If phase margin is not satisfactory design
lead compensator

5/31/2019 15
STEP3: Determine the phase lead required
where φs is the specified phase margin
STEP 4: let φm=φl and determine the α parameter using
If φm required is more than 60 deg it is recommended to use
two identical compensators contributing a maximum lead of
φl /2
ϵ-margin of safety

5/31/2019 16
STEP 5: Calculate the DB gain
Locate the frequency at which the uncompensated system
has a gain of
This frequency ωg2=ωm of the compensated system.
We know that
STEP6: Compute the two corner frequencies of the
compensator

5/31/2019 17
The transfer function of the compensator
STEP 7: Draw the magnitude and phase plot of the
compensated system and check the phase margin.
If the phase margin is still low increase ϵ and go to step 3.

5/31/2019 18
EFFECT OF PHASE LEAD COMPENSATOR
It adds a pole and a zero (with zero to the right of pole) to the
forward path transfer function.
•It adds more damping to the system.
•The rise time and settling time reduces
• Improves the phase margin and gain margin of the closed loop system
•The band width of the closed loop system increases ( corresponding to
faster system)
•The steady state error is not affected

5/31/2019 19
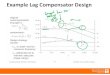
Design a lead compensator for a unity feedback system with an
open loop transfer function
for the specifications of Kv=10 and φm= 36 deg.
SOLUTION

5/31/2019 20
Therefore the open loop transfer function
The sinusoidal transfer function is
The gain cross over frequency is 3.3 rad/sec Phase margin is 17 deg

5/31/2019 21

5/31/2019 22
The magnitude contribution corresponding to ωm is
From the bode plot we find ωg2 corresponding to -3.75 dB as 4 rad/sec
Therefore

5/31/2019 23
Therefore the compensator transfer function
The open loop Transfer function of lead compensated system is
At ω=4
Therefore phase margin is 38o

5/31/2019 24

5/31/2019 25
Lag compensator
Since β>1 the steady state output lags behind the input

5/31/2019 26
The lag compensator can be realized by the following electrical
network

5/31/2019 27
The frequency (ωm) at which maximum phase lag φm
can be obtained by

5/31/2019 28

5/31/2019 29
Lag compensator Design Lag network acts like a low pass filter attenuating high frequencies by
The phase lag is undesirable at the gain crossover frequency of the
compensated system.
Therefore the attenuation characteristic of the lag network is
used for compensation purpose.
STEP 1: Determine the open loop gain necessary to satisfy the specified
error constant.

5/31/2019 30
STEP 2: With this value of K draw the magnitude and phase Bode
plot and determine the phase margin φpm1 and the GCF ωg1 of the
uncompensated system.
If the phase margin is not satisfactory go to step 3.
STEP 3: Find the frequency ωg2 at which the system makes a phase
margin of
Where φpm2 is measured above -180o line φs is the specified phase
margin and ϵ =5o to 15o.
Lag compensation is possible only if there exists a range of frequencies
in which the system has a phase angle less negative than -180o+φ.

5/31/2019 31
STEP4: Measure the gain at ωg2 and equate it to required high frequency
attenuation 20 log β. And calculate β.
STEP 5: choose the upper cut of frequency ω2=1/ꞇ of the lag network
one octave to one decade below ωg2.
so that phase lag contribution at this frequency is negligible.
STEP 6: With β and ꞇ determined the transfer function of lag compensator

5/31/2019 32
STEP 7: Draw the magnitude and phase bode plot of the
compensated system and check the resulting margin
STEP 8: If the specifications are not met redesign the compensator
by choosing another value of ꞇ
Example
Compensate the system with the open loop transfer function
to meet the following specifications.
Velocity error constant
Damping ratio

5/31/2019 33
SOLUTION
The given time domain specifications are converted in to frequency domain
specifications
We know
The open loop transfer function of an uncompensated system may be written
as

5/31/2019 34

5/31/2019 35

5/31/2019 36
The bode plot of uncompensated system shows that GCF=2.25.rad/sec
and phase margin= -4deg
The phase margin(desired)
The frequency corresponding to this phase angle

5/31/2019 37
Placing the upper corner frequency of the compensator
two octave below, we have
The log magnitude at ωc2 =20 dB
Therefore
Therefore the lower corner frequency

5/31/2019 38
The transfer function of the lag network is
The open loop transfer function of compensated system
If we draw the bode plot , the phase margin of
compensated system can be found to be 42 deg.
The step response of the uncompensated system (can be
found out using SIMULINK)shows peak overshoot as 32%
and settling time as 2 sec

5/31/2019 39
Comparison of Phase lag and phase lead network
Phase Lead network Phase Lag network
Band width Increases, High frequency
gain increases Band width decreases
Dynamic response becomes faster Dynamic response slows down
Susceptible to high frequency noise High frequency noise suppressed
No significant decreases in steady
state error Steady state error is reduced
Application : When fast dynamic
response is required
Application : When low steady state
error is required
Cannot be applied when phase angle
of uncompensated system is
decreasing rapidly near Gain cross
over frequency
Cannot be applied when
uncompensated system phase angle in
low frequency region is not sufficient to
provide requisite phase margin

5/31/2019 40
Lag-Lead Compensator
Lag-Lead compensators have a transfer function of the form
Lag-Lead Compensator is a combination lag compensator
and lead compensator connected in series

5/31/2019 41
The equation Gc(s) can be realized by a single electric
lead lag network as shown below

5/31/2019 42

5/31/2019 43

5/31/2019 44
Lead compensation is applied to system to achieve desired
error constant and any phase margin, even though the
uncompensated system may be absolutely unstable.
Lead compensation results in increased bandwidth and faster
response.
For higher order systems and systems with large error
constants, large leads are required resulting in excessively
large bandwidth which is undesirable from noise point of view.
For such systems lag compensation is desired, provided the
uncompensated system is absolutely stable.

5/31/2019 45
Design procedure for lag-lead compensator
STEP1: For the specified error constant determine the open
loop gain necessary
STEP 2: With this value of K draw the magnitude and phase
Bode plot and determine the phase margin and the GCF of
the uncompensated system.
STEP 3: First design the lag section to provide only partial
compensation of phase margin. Choose GCF such that it
is higher than the GCF if the system is fully lag compensated.

5/31/2019 46
STEP 4: determine the value of β, such that the high
frequency attenuation provided by the Lag network is equal
to the magnitude of the uncompensated system at this
frequency.
STEP 5: calculate the value of ꞇ1such that the upper cut off
frequency of lag network is below the gain crossover
frequency
STEP 6: calculate the lower cut-off frequency ω1=1/βꞇ
So the lag network design is over. Find the transfer function,
Draw the magnitude and phase bode plot of the lag
compensated system and determine the GCF and phase
margin,

5/31/2019 47
STEP 7: For the lead section independent value of α
cannot be chosen. So select α=1/β and calculate the
maximum lead provided by the lead section by
STEP 8: Choose the compensated cross over
frequency to coinside with ωm(corresponding to
φm).
This is the frequency where lag section has a gain
of -10 log β db.

5/31/2019 48
Calculate ꞇ2 and αꞇ2 and write the lead compensator
transfer function.
STEP 9: Combine the transfer function of the lag and lead
sections to get the lag-lead compensator transfer function.
Draw the bode plot and determine the phase margin.
Step 10: If the specifications are not met , redesign the
system by modifying the values of β and ꞇ .

5/31/2019 49
Lead lag compensator design
The open loop transfer function of a unity feedback system is
given by
Compensate the system to meet the following specifications
Velocity error constant Kv >= 25 s-1
Phase margin >= 60o
Solution

5/31/2019 50

5/31/2019 51
The sinusoidal transfer function is
The bode plot of uncompensated system shows that the
GCF=6.5 rad/sec, and phase margin is -16o
Therefore the uncompensated system is unstable for the
given value of K. It is stable only for limited valve of K.
So lead lag network is used for compensation.

5/31/2019 52
First lag compensator is used to partially compensate phase
margin.
Let it provide 36o so that the new crossover frequency is
2rad/sec
The magnitude at 2 rad/sec is 18 dB therefore

5/31/2019 53
The upper cut off frequency of the lag network is two octaves
below this GCF
The lower cut off frequency
Therefore the T. F of lag compensator
The lag compensated network

5/31/2019 54

5/31/2019 55
For the design of lead section
Therefore
To utilize this phase lead ,at ωm the magnitude must be
From the lag compensated system we can find that the
magnitude -9 db occurs at frequency ωm =3.8 rad/sec
Therefore

5/31/2019 56
The lead compensator T.f is