-
An Integrated Overlay Architecture BasedMulti-GNSS Front-end
Alexander Rügamer∗, Santiago Urquijo∗, Markus Eppel∗, Heinrich
Milosiu∗, Johannes Görner†, Günter Rohmer∗∗Fraunhofer IIS
Nuremberg, Germany
†Technische Universität Dresden, Germany
Abstract—This paper presents the overall architecture, firsttest
structure implementations, and measurement results of anintegrated
GNSS front-end based on intentional path overlay. Thefront-end ASIC
supports simultaneous multiband, multi-systemGNSS reception of GPS
L5 / Galileo E5 / GLONASS G3 andGPS L1 / Galileo E1 / GLONASS G1
signals with up to 52 MHzbandwidth while using only one common
baseband path thanksto an intentional analog signal overlay. Test
structures of theRF and baseband parts were realized in a 1.8 V,
150 nm RF-CMOS technology packaged in a QFN48 housings with full
ESDprotection. Both chips are described in detail regarding
theirdesign and their actual measurement results.
Index Terms—Satellite navigation systems, Global
PositioningSystem, Receivers, CMOS integrated circuits, GNSS
front-end
I. INTRODUCTION
Global navigation satellite system (GNSS) receivers
greatlybenefit from the modernization of existing GNSS
constel-lations such as GPS and GLONASS as well as from thelaunch
of new ones such as Galileo and COMPASS. First, thecombining of
these constellations can significantly improvethe navigation
solution availability in urban canyons andheavily shadowed areas.
Second, increased satellite availabilitytranslates into higher
measurement redundancy and improvedreliability. Additionally, the
excellent inherent noise and multi-path mitigation capacity of the
new and modernized widebandsignals notably improves accuracy in
both measurement andposition domains.
Single-frequency users can receive GNSS signals and ser-vices
but there are several advantages to multi-frequencyprocessing: The
frequency diversity offers superior protectionagainst jamming and
interference since, if one frequency bandis corrupted, the receiver
is still able to provide a navigationsolution relying on another
frequency band. Moreover a fasterreception of the navigation
messages is often possible sincethe same information is transmitted
on several bands (e.g.the Galileo I/NAV message broadcast on both
E1B and E5B)using page swapping [1]. Finally, multi-frequency can
be usedto form ionosphere-free pseudorange measurements that
canremove the first-order ionospheric bias and therefore providea
higher positioning accuracy.
The challenges of multiband reception are a much higherrequired
bandwidth, higher sampling rates, often several re-ception chains,
a higher digital bandwidth (the raw samplerate from the front-end
output to the baseband signal process-ing) and more self-generated
interferences (e.g. when several
frequency synthesizers for different local oscillator
frequen-cies are needed). This all leads to a noticeable increase
inreceiver complexity, size, and power consumption, especiallyfor
integrated radio frequency (RF) front-ends.
Traditional GNSS front-ends but also current mass-marketGNSS
receivers typically feature a low intermediate frequency(low-IF)
architecture with an RF-bandwidth of approx. 2 to4 MHz and a
low-resolution analog-to-digital converter (ADC)of 1 to 3 bit [2],
[3]. This is sufficient for the legacy GPSL1 C/A or the narrowband
Galileo E1 BOC(1,1) signals butnot for most of the new GNSS
signals, especially if theirfull potential in terms of accuracy and
multipath resistance isto be reached. For these, considerably
larger bandwidths arenecessary (e.g. at least 16 MHz for the
GPS/Galileo L1/E1MBOC(6,1,1/11), 20 MHz for L5/E5A BPSK(10)
signals,and up to 52 MHz for processing the complete Galileo
E5AltBOC(15,10) signal) which leads to higher sampling
raterequirements.
The straightforward approach is to widen the bandwidthand to use
higher sampling rates for each desired GNSSsignal while keeping the
original low-IF architecture. Thesesolutions can already be found
as integrated circuits and caneasily be tuned to the required GNSS
signal band [4], [5], [6].However real multiband reception is only
possible by adding acomplete extra receiver for each additional
frequency band tobe received, either as a separate chip as proposed
in [4] or byintegrating more or less several standalone receivers
on one dieas proposed in [6] and [7]. This makes their
implementationstraight forward but is inefficient especially for an
integratedcircuit implementation.
For a wideband BOC signal such as the Galileo E5AltBOC(15,10) a
zero-IF architecture can be very advanta-geous since the inherent
zero-IF problems, namely DC-offsetand flicker noise, are not so
relevant to the DC-free BOCsignals. Moreover, quasi zero-IF
architectures can be usedto enable simultaneous reception of the
L1/E1 GPS/Galileosignals and the GLONASS G1 frequency division
multipleaccess (FDMA) signals by placing the local oscillator
betweenboth signal bands [8].
All the architectures mentioned so far are generic in away that
none exploit any properties of the GNSS signalscode division
multiple access (CDMA) structure: the usefulsignals are below the
thermal noise floor, spread with longpseudo-random noise (PRN)
sequences, and have differentbandwidths. The complexity of a
multiband RF front-end
978-1-4673-0387-3/12/$31.00©2012 IEEE 50
-
L1 SPSBPSK(1)
Inph
ase
Quad
ratur-
phas
e
Inph
ase
Quad
ratur-
phas
e
NAVSTAR-GPS
GLONASS
Inph
ase
Quad
ratur-
phas
e
Galileo
PPSBPSK(10)
BPSK(5.11)
E5a -BPSK(10)
1176.45 MHz
E5bBPSK(10)
1207.14 MHz
E5AltBOC(15,10)1191,795 MHz
E6bcBPSK(5)
E6aBOCcos(10,5)
BOC(2,2)
1176.45 MHz
BPSK(0.511)1598.0625 ….…1605.3750 MHz
E1aBOCcos(15,2.5)
E1bcCBOC(6,1,1/11)
L1C-IBOC(1,1)
M-CodeBOC(10,5) L1 M-Code
BOC(10,5)
L2CBPSK(0.511)
L1C-QTMBOC(6,1,4/33)
G1G3G5
BPSK(5.11)L1OC
L1SC L1OF
L1SF
L5
BPSK(10)
PPSBPSK(10)
1227.60 MHz1575.42 MHz1575.42 MHz
L2 L1
L5OC
BPSK(10)1202.025
L3OC
L3SC
G2
L2OF
L2SF
1575.42 MHz
BOC(2,2)
1278.75 MHz 1575.42 MHz
E5 E6 E1
L5/E5/G3 Band: ARNS and RNSS L1/E1/G1 Band: ARNS and RNSSL2 / E6
Band: RNSS only
BOC(4,4)1176.45 MHz
BPSK(0.511)1242.9375 ……1248.6250 MHz
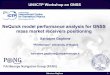
Fig. 1. GNSS signals of the future
can be considerably reduced by sharing front-end componentsor
stages using intentional signal overlay while exploitingthe
aforementioned properties of the GNSS signals [9]. Theproposed
overlay front-end architecture exploits the propertiesof the direct
sequence spread spectrum GNSS signals byintentionally overlaying
two signal reception paths. Thanksto the overlay, only one common
baseband path is needed.This allows significant savings in terms of
cost, size, powerconsumption, and digital bandwidth. The
possibility to receivewideband signals with up over 52 MHz
bandwidth enables tofully benefit from the inherent noise and
multipath resistanceof the new Galileo AltBOC and GPS/Galileo MBOC
signals.To the authors knowledge there are no publications of
inte-grated GNSS front-end receiver chip measurements capableof
processing the complete AltBOC signal.
The paper is organized as follows: First the selection
ofappropriate frequency bands for this receiver type is
explained.Then the overlay architecture with its frequency plan
andsome implementation details is described. In the fourth
sectionthe used semiconductor technology of the ASIC is
brieflyintroduced before the architecture and measurement results
ofboth the RF and the baseband part are discussed in
detail.Finally, conclusions are drawn and the performance of
thisoverlay front-end is compared with that of current
state-of-the-art integrated multi-GNSS front-end
implementations.
II. GNSS SIGNALS AND STATUS
Currently, two fully operational GNSS are available: theAmerican
NAVSTAR-GPS and the Russian GLONASS sys-tem. Both systems are
continuously evolving to improve thesignals and services they will
provide in the coming years.Aside, two other GNSS are being
developed - the European
Galileo and the Chinese COMPASS systems. Therefore, in afew
years, at least four independent but interoperable GNSSwill be
available to support an increasing range of applications.
Figure 1 shows the L-band spectrum of the current andplanned
GNSS signals with the notation of their modulationnames and carrier
frequencies. The red and green signals areclassified, the blue ones
are open signals. All current andupcoming GNSS signals are within
the protected Radio Navi-gation Satellite Services (RNSS) band but
only the L1/E1/G1and L5/E5/G5/G3 bands are within the even better
protectedspectrum allocated to Aeronautical Radio Navigation
Services(ARNS). The other three GNSS bands (i.e. E6, G2, and
L2)therefore suffer from radar, military transmissions and
otherpotentially strong interferers.
The combination of both E5 (including the GPS L5,GLONASS L5OC
and L3OC, Galileo E5a and E5b) and E1(featuring the GPS L1 C/A and
L1C, GLONASS L1OC, andGalileo E1-B/C) signals is deemed the most
appropriate for theadvanced open-service, multi-constellation,
multi-frequencyGNSS receiver that is intended to be realized with
thisintegrated GNSS overlay front-end. For fast acquisition the
rel-atively narrowband L1/E1 signals (GPS C/A and Galileo E1-B/C
with BPSK(1) and BOC(1,1) modulation, respectively)are typically
used. The estimated Doppler and code delay canthen be used for high
performance tracking with the widebandL1/E1 MBOC(6,1,1/11), L5/E5a
BPSK(10), L5OC BOC(4,4)or E5b/L3OC BPSK(10) signals [10].
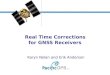
III. OVERLAY FRONT-END ARCHITECTURE
The front-end architecture consists of a zero-IF down-conversion
path for the L5/E5/G3 bands and a double hetero-dyne low-IF path
for L1/E1/G1 bands as shown in Figure 2.
51
-
LNA
LNA
IF_AMP_E5
IF_AMP_E5ADC
ADC
F_LO1_E1 =1192 MHz
F_LO_E5 =1192 MHz
E1_IF =-13.913 MHz
IF1_E1 =383.42 MHz
IF_AMP_E1
F_sampling = F_OSC = 74.5 MHz
Q
I
E5 PathHomodyne
E1 PathHeterodyne
F_LO2_E1 =397.333 MHz
Mixer 1
Mixer 2
/3
74.5 MHz
F_VCO =2384 MHz
FrequencySynthesizer
Combiner
I/QChange
E1VGA
E5VGA
E5_IF =0 MHz
0°
90°/2
CPCharge Pump
LFLoop Filter
VCOVoltage Crtl. Osc
/2/16
PDPhase
DetectorBuffer
F_LO_E5 =1192 MHz
F_LO2_E1 =397.333 MHz
Serial Data Interface
Digital Core 0°
90°/2
RF Part Baseband Part
AGC
VGA
Anti-Aliasing10-40 MHz
VGA
VGA I
VGA Q
Filter-BW
TCXO
Power Chip on / offPower E1 / E5 on / offI/Q ChangeCombiner VGA
ControlAGC ControlADC Configuration
Fig. 2. Proposed overlay GNSS front-end architecture
The incoming L5/E5/G3 band is amplified and directly shiftedto
baseband by a quadrature down-conversion mixer with alocal
oscillator (LO) frequency of 1192 MHz and amplifiedagain by an IF
gain block.
A double heterodyne architecture is selected for theL1/E1/G1
reception path to circumvent the image problem ofa pure low-IF
architecture and to reuse the LO frequenciesas it will be explained
in the following paragraph. In the firstmixing stage the RF signal
is down-converted to an IF ofapprox. 400 MHz using a real mixer.
The image frequencyis more than 750 MHz away from the RF and can
thereforebe easily attenuated by an RF bandpass filter preceding
thefront-end input. An IF gain block both amplifies the IF
signalsand provides sufficient isolation to the next mixing stage.
Thesecond mixing stage consists of a complex mixer which shiftsthe
IF signals to a low-IF frequency, as shown in Figure 3.
Thanks to a judicious frequency plan all LO frequenciescan be
directly derived with integer-N dividers from a singlevoltage
controlled oscillator (VCO), as shown in the frequencysynthesizer
block diagram in Figure 2. This architecture reusesthe E5-LO
frequency for the first E1 mixing stage. The secondE1 mixing stage
uses exactly one third of the first E5-LO
frequency. By using an off-chip reference oscillator of e.g.74.5
MHz the frequency synthesizer can be realized with astraight
forward integer-N PLL type implementation.
The combiner overlays both (complex) IF-signals from theE5/L5/G3
path and the E1/L1/G1 path in the analog domain.This is possible
since all GNSS signals are direct sequencespread spectrum based
signals with a high spreading gain anda negative signal-to-noise
ratio (SNR) before the correlation.Preceding the overlay, the
signals can be relatively amplifiedor attenuated using a variable
gain amplifier (VGA) combinercontrollable by the digital signal
processing - in most cases theGNSS baseband receiver. Thanks to
this combiner only onecommon baseband stage, consisting of an
anti-aliasing lowpassfilter, an automatic gain control loop (AGC),
and analog-to-digital-converters (ADC) is needed.
The downside of the intentional signal overlay is that thenoise
from the overlayed signal bands is folded into thebaseband range
and directly affects the signals C/N0. Using anappropriate power
control before the overlay, the overlay noisecan be controlled and
at least partly mitigated as explained in[11]. Moreover, due to the
overlay, jammers present in onefrequency band also impact the
other, previously undisturbed,
52
-
Galileo E5a/GPS L5 -BPSK(10)
1176.45 MHzE5b -
BPSK(10)1207.14 MHz
E5 Filter, BW=72 MHz
E5a/L5-15.14 MHz
E5b15.55 MHz
LO=1192 MHz 1575 MHz
0 MHz
E1 / L1-13.91 MHz
809 MHz
E1 ImageFrequency
GLONASSG1 FDMA
1602 MHz
complex E5 mixer andfirst real E1 mixer with
LO=1192 MHz
second complex E1 mixer withLO=1192/3 MHz= 397.33 MHzOverlay,
and Anti-Aliasing LP
filter with 35 MHz
Galileo E1 / GPS L1 C/A
E5a/L5 -BPSK(10)
-15.14 MHz
E5b -BPSK(10)15.55 MHz
GLONASS G1+12.67 MHz
782 MHz
G1 ImageFrequency
E5a/L5
GLONASS410 MHz
E1 / L1383 MHz
LO=397.33 MHz
GLONASSG3 CDMABPSK(10)
1202.025 MHz
E5bG3
G3 CDMA10.025 MHz
E5a/L5 E5bG3
GLONASS G3+10.025 MHz
E5 - AltBOC(15,10)1191,795 MHz
Fig. 3. Signal down-conversion scheme
frequency band. But the advantage of being able to receive
allthe open-service GNSS signals together with just one ADCis
obvious and makes the overlay architecture interesting foradvanced
mass-market multiband, multi-system receivers.
IV. SYSTEM AND IC DESIGN
For the integrated circuit implementation the new LF150process
from the German foundry LFoundry was used. LF150features a 0.15 µm
RF-CMOS process with up to 6 metal layersincluding a thick metal
e.g. for high Q inductors and optimizedRF library devices. The
complete chip was implemented in thisprocess using an 1.8 V
operation supply.
To test and verify the different parts of this
front-endarchitecture, its first implementation was split into
three teststructures described in the following sections: A low
noiseamplifier (LNA) and mixer ”pipe-cleaner”, an analog RF
re-ceiver part, and a mixed signal baseband part. These blocks
areshown in Figure 2. The pipe-cleaner die was directly bondedon a
printed circuit board (PCB) without any packaging whilethe other
two test structure chips were packaged in a QFN48
housing including full ESD protection and measured on adedicated
PCB separately.
V. RF PART
It is assumed that an active antenna precedes the front-endchip.
According to Friis’ Formula, the active antenna LNAconsiderably
lowers the noise figure (NF) requirements for theon-chip LNAs. The
analog RF receiver test structure uses twofully differential LNAs
for the upper and lower band amplifica-tion, followed by complex
Gilbert mixing stages, intermediateamplifiers, and test-buffers to
make off-chip measurementspossible.
A. LNA, Mixer, and IF-Amplifier Architectures
For both the E1 and E5 band LNA a modified version ofthe fully
differential topology described in [12] and [13] isused to
significantly suppress on-chip interferences cominge.g. from the
mixed signal baseband part on coupling over thesubstrate. The LNAs
were not designed to achieve the lowestpower consumption or NF but
mainly for functionality. TheLNAs consist of two stacked stages as
shown in Figure 5. The
53
-
E5 LNA
E1 LNA
Mixer I
Mixer Q
AMP
AMP
BufBuf
1150 µm
1900
µm
Fig. 4. Chip photo of the RF receiver test structure
input stage is a cascode topology with transistors M1 to M4.
Acascode topology is advantageous since it inherently providesa
high reverse isolation [14] which is particularly important inthe
E5 zero-IF architecture, where the LO signal of the mixermatches
the LNA’s input frequency. For better input impedancematching an
inductive source degeneration is used. Lookinginto the gates of the
transistors M1 and M2 the inductors L1and L2 contributes to the
real part of the impedance. Insteadof using two separate inductors
a common tapped one is used,see the chip photo in Figure 4. With
the series connection ofthe capacitor C1 and C2, and the real parts
of the impedanceseen through the gates of M1 and M2, respectively a
highpassRC-filter is formed. The inductors L3 and L4 are used to
tunethe output of the first stage. The capacitor C5 together withL3
and L4 sets the resonance frequency to the signals
carrierfrequencies. The differential amplifier between Vb and R1
andR2 adaptively controls the bias points and effectively
mitigatesprocess, temperature, and supply variations. A
common-sourceoutput stage of the LNA is formed by the transistors
M5 andM6.
Both the first and the second mixers are realized in astandard
Gilbert-Cell topology. Gilbert-Cells are a fully dif-ferential,
double balanced topology providing a very high LOto IF isolation
[14]. Being fully differential fits perfectly to thedifferential
LNA output. The high isolation is very beneficialfor the intended
E5 zero-IF architecture.
The IF-amplifiers are standard source coupled differentialpairs
with a resistive load designed for a gain-bandwidthproduct (GWB) of
approx. 10 GHz. A coarse lowpass filtering
M1 M2
M3 M4
M5 M6
L1 L2
L3 L4
C1 C2
C3 C4C5
R1 R2
R6 R7 R8 R9
Inp Inn
Op On
Ibias
+–
Vb
Fig. 5. LNA circuit diagram, modified version of [12], [13],
some biasingdetails omitted
at the output is realized with first order RC-filters.
B. RF Part Measurement Results
These analog RF components are most critical and at thesame time
crucial for the whole receiver functionality. Tocheck the behavior
of the design kit’s RF-models a first”pipe-cleaner” run was done
with test-structures of the LNAsand mixers already including full
ESD protection. For themeasurements the originated chip-die was
directly bonded ona PCB without any packaging.
In order to measure the differential LNA input with astandard
single-ended network analyzer, an RF-balun was usedto convert
between the single-ended and differential signaldomains. Moreover
the LNAs were matched using a lumpedcomponent LC-network before the
balun. The measurementresults of the input reflection coefficient
S11 are shown inFigure 6 for both the lower band E5 and upper band
E1 LNAwith plots of the theoretical, normalized power spectral
density(PSD) of the GNSS signals to be received. It can be seenthat
the 3 dB matched frequency bandwidth is greater than200 MHz for
both LNAs, enabling the reception of all thelower and upper GNSS
L-band signals.
The impedances on the chip components are generally notdesigned
for 50Ω interfaces. The on-chip structures are sosmall in relation
to the lower GHz frequencies in the L-band that any transmission
line effects can be neglected.Therefore the on-chip LNAs outputs
are not intended todrive a 50Ω load, e.g. given by the standard
measurementequipment. These LNAs only need to drive the much
higher
54
-
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8
x 109
−25
−20
−15
−10
−5
0
Frequency [Hz]
S11
[dB
]
Measured LNA S11
Lower Band LNAUpper Band LNAE1 MBOC PSDGLONASS G1 PSDE5 AltBOC
PSD
Fig. 6. Measured S11 of the lower band E5 and upper band E1 LNA
withplots of the theoretical, normalized PSD of the GNSS signals to
be received
impedance of the following active mixer stage. To enable
off-chip measurements, a NMOS buffer with a transconductanceof 20
mS was designed at the output of the mixer leadingto 0 dB gain when
a load impedance of 50Ω is applied.Designing such a buffer for the
mixer output is facilitated bythe fact that the mixer output
frequencies are within the IFrange and no longer are at RF.
Therefore, the gain of the LNA can only be measuredindirectly.
First the gain of the active mixer was determinedto be 9.5 dB for
both the E1 and E5 mixers using the NMOS-buffer as previously
explained. The active mixer LO inputwas an external rectangle
signal with a differential peak-to-peak amplitude of 700 mV. Then
the complete chain includ-ing the LNA and mixer was measured. The
implementationlosses of the balun and cables were deembedded. With
thepreviously determined mixer gain, the LNA gain alone couldbe
calculated. The results of the pipe-cleaner measurementsof the LNA
and mixer are shown in Table I and fit to thesimulated values. The
current consumption is around 3 mAfor the E5 LNA, and around 2 mA
for the E1 LNA, which isalso consistent with the simulations.
The 1 dB input compression point of the combined LNAwith mixer
measurement was determined to be −30 dBm forboth E1 and E5. In
comparison to the linearity of off-the-shelf LNAs this may seem
very low, but keeping in mind thatin an undisturbed environment
only thermal noise within thebandwidth of interest is received
(approx. −100 dBm) and thatthe front-end incorporates a 3 bit ADC
which provides approx.18 dB of dynamic, even a −30 dBm input
compression pointis sufficient.
Having validated the pipe-cleaner designs, the complete
RFreceiver including the intermediate frequency amplifier
wasmanufactured and packaged in the intended QFN48 housing. Aphoto
of the chip is shown in Figure 4. Still the aforementionedbuffers
are included in parallel to each component’s output forthis test
structure to allow separate component measurements.
TABLE IMEASUREMENT AND SIMULATION RESULTS OF THE RF RECEIVER
COMPONENTSE5 LNA1 E1 LNA1 Mixer1 IF AMP2
Gain sim. [dB] 20.0 15.0 10.0 15.0Gain meas. [dB] 19.0 12.0 9.5
16.0
NF sim. [dB]
-
Dig.Core
ADC
AGC+VGA
Lowpass Filter
Combiner
700 µm
1300
µm
Fig. 7. Chip photo of the baseband part
and turn off various blocks and components of the chip.
Itsfunctionality is summarized in Table III. The digital core
notonly allows an effective debugging and testing of the chip,
italso gives to the GNSS receiver the possibility to modify
orcontrol the front-end hardware according to its environmente.g.
switching off one path if a severe interferer is detected
orcontrolling the combiner gain values to minimize the overlayloss
as described in [11].
2) Combiner: As shown in the combiner block diagram inFigure 2,
before the E1 and E5 signal paths are overlayed theycan be
amplified or attenuated by the combiner VGA cell. Thisblock can be
controlled in 64-steps (6 bit) via the SPI-bus ofthe digital core.
Each signal path has a tunable 25 dB dynamicrange from −10 to 15
dB, see Figure 8. In order to improvethe area implementation of the
cell, the steps show a non-linear characteristic depicted as
differential gain in Figure 8.Since the combiner VGAs should be
regulated by an adaptivecontrol algorithm running on the baseband
GNSS receiver, thisnon-linearity is irrelevant.
According to the frequency down-conversion scheme de-picted in
Figure 3 the E1 signal overlays the E5a/L5 mainlobe. If the
RF-filter exclusively selects the E1 frequency band,only the left
main-lobe of E5 (in essence the Galileo E5a andGPS L5 signals) is
affected by the overlay while the right
TABLE IIIDIGITAL CORE FUNCTIONALITY
Logical Block Component MethodLNA E1 Power Down
E5 Power DownMixer E5 I and/or Q Power Down
First E1 I and/or Q Power DownSecond E1 I and/or Q Power
Down
IF-amplifier E5 I and/or Q Power DownE1 I and/or Q Power
Down
Combiner I/Q Change Mirror E1 SpectrumVGA E1 6 bit −10 to 15
dBVGA E5 6 bit −10 to 15 dBAdder I and/or Q Power Down
AGC Low-pass Filter Power DownADC VGA I and/or Q Power
DownInternal AGC Loop Power DownControl Method CW or
GNSS-noisePulse Blanking on / offOverload Control on / off
ADC I and/or Q Path Power DownADC Buffer Power DownResolution 3
or 2 bitOutput FormatOutput Driver Strength
10 20 30 40 50 60−10
−5
0
5
10
15
20
Com
bine
r G
ain
[dB
]
Combiner Values (6 bit)10 20 30 40 50 60
0
1
2
Diff
eren
tial G
ain
[dB
]
Fig. 8. Simulation of the combiner block digital programmable
gain for bothE1 and E5 paths
main-lobe comprising Galileo E5b remains untouched. Thiscan also
be inverted by changing either the polarity of oneE1 signal I/Q
component (swapping + and - signals in thein-phase and quadrature
branch) or its phase (swapping thein-phase and quadrature branch)
before the combiner stage.Doing so leads to a mirroring of the E1
signal around thezero frequency axis. Depending on the intended
application,this method can be beneficial since the overlay loss
can becompletely switched off on either E5a or E5b assuming
anadequate E1 signal RF bandpass filter.
3) Anti-Aliasing Lowpass Filter: A 4th order active
lowpassfilter was realized in a Chebyshev topology using two
op-amps and RC-networks. The default 3 dB cutoff frequencyis around
33 MHz. Since the bandwidth setting integratedRC values vary by
±20% due to CMOS process variationsa self-calibration was realized
with an external reference
56
-
0 5 10 15 20 25 30 35 40 45 50−25
−20
−15
−10
−5
0
5
10
15
Frequency [MHz]
Am
plitu
de R
espo
nse
[dB
]
120 kΩ115 kΩ110 kΩ105 kΩ100 kΩ95 kΩ90 kΩ85 kΩ80 kΩ75 kΩ70 kΩ65
kΩ60 kΩ55 kΩ50 kΩ45 kΩ40 kΩ
Fig. 9. Simulation results of the low-pass filter bandwidth
together with thecombiner in dependency of an external reference
resistor
resistor. This external resistor can also be used to adjust
thefilter bandwidth between 3 to 35 MHz. Figure 9 shows
thesimulation result of the filter bandwidth in dependency of
theexternal reference resistor value swept from 40 to 120 kΩ.
4) Automatic Gain Control: The automatic gain controlensures
that the ADC’s input signals are within the optimalrange. The AGC
senses the distribution of the ADC bits andsets the ADC VGA gain
appropriately. The control algorithmscan be configured to achieve
better performance in presence ofCW signals or for a minimum C/N0
loss when GNSS-noiselike signals are applied. The dynamic range of
the VGAs is−12 to 40 dB according to the simulations.
5) Pulse Blanking: The baseband chip is equipped with anenergy
detector setting a blanking flag output signal if ADCclipping is
occurring. Moreover, the ADCs can be configuredto blank the signal
if the blanking flag is active. This featureenables pulse blanking
mitigation at a very early stage makingit very effective. Finally,
the AGC can be protected from beingstimulated from pulses using the
overload control switch.
6) ADC: The analog-to-digital-converters (ADC) digitizethe
output differential signals of the variable gain amplifiers.Typical
GNSS receivers use low bit quantization. The im-plemented
converters employ 3 bit which is a good trade-off between
complexity and low implementation loss. Dueto the low number of
bits requirement, the classical flashtopology was selected. The
cell includes a buffer, a resistorladder, comparators and a digital
core cell for decoding. Thecomponents are optimized in terms of
current consumption andspeed. The comparators include an
amplification stage and adecision stage. The amplification stage
reduces the couplingto the input signal of the noise generated at
the decision stage.The decision stage consumes current only at the
rising edgeof the clock signal. The current consumption of the
differentstages is minimized in order to preserve the ADCs
linearity.The resistor ladders of the ADCs are placed together in
thelayout in order to reduce the mismatch.
Fig. 10. Photo of the baseband part test PCB
B. Baseband Measurement Results
The baseband functionality was measured and verified withthe
test board shown in Figure 10. The PCB provides two com-plex input
signals (E5 I/Q, E1 I/Q) which are converted fromsingle-ended to
differential with an external balun including abias point. Moreover
some output buffers for the clock input,the digital ADC outputs,
and SPI interface are employed asan interface for the measurement
equipment.
It has to be noted that due to the baseband part teststructure
implementation, it is not possible to test single blocksseparately.
Therefore, all reported test results were measured atthe dual-ADC
outputs using input signals at the combiner. Themeasurement results
include all effects from all the basebandpart components (from
combiner to ADCs).
1) Combiner: To test the combiner with its E1 and E5VGAs, two
complex GNSS baseband signals - one 16 MHzbandlimited E1 MBOC and
one E5 AltBOC signal - weregenerated and fed to the baseband part
inputs with a highSNR to be able to identify their main-lobes in
the plots. TheE1 signal was shifted to an IF of −13.91 MHz to be
compliantwith the frequency down-conversion scheme proposed in
Fig-ure 3. Using the combiner VGAs, the E1 signal amplificationwas
varied from 13.5 to −5.3 dB while the E5 combiner VGAwas hold
constantly on 2 dB. Figure 11 shows the overlayedsignals with
different E1 combiner VGA settings. Since theAGC automatically
amplifies the overlay output signal to fitto the optimum ADC range,
the PSDs shown in Figure 11were scaled in a way that the E5b main
lobe is approximatelyalways at the same level. This enables a
better comparison ofthe combiner VGA effect. It can be concluded,
that the overlayworks appropriately and that sufficient overlay
control of thepath is provided by the implemented combiner
VGAs.
2) E1 I/Q Change: The blue colored plot in Figure 12shows the
recorded PSD when both paths are simultaneouslyactivated with
intentional overlay of the E1 MBOC and E5aBPSK signals according to
the frequency down-conversionscheme proposed in Figure 3. As the
blue colored plot shows,the left main-lobe of E5a is completely
affected by the overlaywhile the right side remains untouched.
Activating the E1 I/Qchange feature, only the E1 path is mirrored
around the zerofrequency axis. The PSD with activated E1 I/Q change
is
57
-
−25 −20 −15 −10 −5 0 5 10 15 20 25−95
−90
−85
−80
−75
−70
−65
−60
Frequency [MHz]
Sca
led
Pow
er S
pect
ral D
ensi
ty [d
B/H
z]
Fig. 11. Measured overlay PSD of E1 and E5 signals in dependency
of theE1 combiner VGA settings
−25 −20 −15 −10 −5 0 5 10 15 20 25−95
−90
−85
−80
−75
−70
−65
−60
Frequency [MHz]
Pow
er S
pect
ral D
ensi
ty [d
B/H
z]
E1 and E5a overlayedE1 and E5a overlayed with I/Q change
Fig. 12. Measurement of E1 I/Q change activation
depicted in the same Figure in green color and shows thatthe E5a
main-lobe is now no longer affected by the overlay.
3) AGC and ADC VGAs: The AGC loop continuouslymodifies the ADC
VGAs control voltage to guarantee anoptimal ADC input power. The
implemented circuitry enablesto control the VGAs (I and Q)
independently or together, asshown in Figure 2. The voltages at the
I and Q VGA controlpins were measured while the input power was
swept. TheAGC loop controls the VGAs in a way that the ADC
inputpower is kept constant. Therefore, the VGAs dynamic rangecan
be measured observing the range of the control voltagesto be
approx. 50 dB between the signal input powers of 5 to−45 dBm as
shown in Figure 13. However, it should be notedthat for normal
operation the I and Q VGA control pins areconnected together.
Nevertheless Figure 13 also demonstratesthe excellent matching of
the I and Q baseband paths.
Moreover, the combiner VGAs were set to their minimumvalue
(approx. −10 dB) and afterwards to their maximumvalue (approx. 15
dB). The combiner VGAs dynamic range
−50 −40 −30 −20 −10 0 10450
500
550
600
650
700
750
800
850
900
950
1000
Pin [dBm]
AD
C V
GA
Vol
tage
[mV
]
VGA I; Combiner VGA=min; AGC=noiseVGA I; Combiner VGA=min;
AGC=CWVGA I; Combiner VGA=max; AGC=noiseVGA I; Combiner VGA=max;
AGC=CWVGA Q; Combiner VGA=min; AGC=noiseVGA Q; Combiner VGA=min;
AGC=CWVGA Q; Combiner VGA=max; AGC=noiseVGA Q; Combiner VGA=max;
AGC=CW
Fig. 13. Measured ADC VGAs values of the I and Q paths in
dependencyof the input power
0 0.5 1 1.5 2 2.5 3 3.5 4
x 107
−70
−60
−50
−40
−30
−20
−10
0
Frequency [Hz]
Am
plitu
de [d
B]
BW=39.801 MHz, SNDR=18.2247 dB; ADC 3−bit ENOB=2.7346 bit
Fig. 14. Measured dual-ADC output spectrum with 10 MHz input
tone anda sampling frequency of 80 MHz
can also be confirmed by measuring the offset between theresults
with minimum and maximum combiner VGAs settings.
And finally, the AGC control method was changed fromCW-mode to
the GNSS-noise mode. In CW-mode more clip-ping of the ADCs occurs.
Therefore the VGAs gain in CWAGC mode is always approx. 5 dB higher
than in the GNSS-noise mode.
4) ADC: Figure 14 shows the measurement results ofthe
signal-to-noise-and-distortion-ratio (SNDR) of the wholebaseband
part at nominal conditions. A 10 MHz input signalwas applied to the
test-chip and sampled with 80 MHz. UsingEquation 1 for a sinusoidal
input signal, the effective numberof bits (ENOB) was calculated to
be 2.74 bit which is inaccordance with the simulation results.
ENOB = (SNDR − 1.76 dB)/6.02 dB (1)Although the receiver
architecture shown in Figure 2 has anominal dual-ADC sampling rate
of 74.5 MHz, different tests
58
-
TABLE IVCOMPARISON WITH PREVIOUSLY PUBLISHED INTEGRATED
MULTIBAND GNSS FRONT-ENDS[4] [15] [5] [7] [6] [8] this work
Process 130 nm CMOS 180 nm CMOS 65 nm CMOS 130 nm CMOS 180 nm
CMOS 65 nm CMOS 150 nm CMOS1st GNSS band L1/E1 L1/E1 L1/E1 L1/E1
L1/E1/B1, L1/E1/B1, L1/E1/G1
2nd GNSS band L5/E5aa L5/E5a b G1 L5/E5ac L5/E5a, B2/E5b B2/E5b
L5/E5a, E5b/G33rd GNSS band - - - - L2 c,d L2 c,d E5
Bandwidth 14/20 MHz 9 MHz 2/4/8 MHz 4.53/24 MHz 2/4/20 MHz 2 to
8 MHz 52 MHzADC resolution 2 bit I/Q , n.a. 2x 3 bit 2 bit 4 bit
I/Q 2 to 4 bit I/Q 3 bit
ADC sampl. rate 66.188 MHz 24 MHz 32.736 MHz 49.104 MHz 62 MHz
n.a. 74.5 MHzSize 2.89 mm2 a 16.0 mm2 4.65 mm2 11.4 mm2 7.2 mm2
10.5 mm2 6.76 mm2 e
a One chip needed for each GNSS band to be receivedb Switching
receiver architecture; only one band can be received at the same
timec Integration of two almost independent reception chainsd Only
two GNSS bands can be received simultaneouslye Die size of complete
receiver including frequency synthesizer
showed a reliable maximum ADCs sampling rate of over150 MHz.
VII. CONCLUSION
The presented RF front-end parts enable the
simultaneousreception of GPS L5 / Galileo E5 / GLONASS G3 and GPS
L1/ Galileo E1 / GLONASS G1 signals with broad bandwidth. Byusing
the proposed frequency plan and sharing the basebandparts with an
overlay concept, the underlying architectureenables an efficient
implementation in terms of digital datarate, chip size, and power
consumption.
In comparison to other recently published integrated multi-GNSS
front-end implementations (see Table IV) the receptionbandwidth has
been significantly increased. The presentedimplementation supports
the first time the reception of thecomplete 52 MHz bandwidth
Galileo E5 AltBOC(15,10) signalin an integrated front-end enabling
to fully benefit from theinherent noise and multipath resistance of
this sophisticatedmodulation scheme.
For future work, the presented RF and baseband parts willbe
revised and combined with the frequency synthesizer toform a fully
integrated multi-GNSS front-end ready to coher-ently and
simultaneously receive most open GNSS signals.The currently
foreseen layout of the complete receiver chipincluding the
frequency synthesizer has a die size of 6.76 mm2.The already small
implementation size shows the potentialof this overlay architecture
as compared to other recentlypublished integrated multi-GNSS
front-end architectures.
ACKNOWLEDGMENT
This work was supported by a Fraunhofer IIS internalresearch
program (IIFOP). The authors express their appre-ciations to all
members of this project.
REFERENCES
[1] “European GNSS (Galileo) Open Service Signal In Space
InterfaceControl Document (OS SIS ICD) Issue 1,” European
Union/EuropeanGNSS Supervisory Authority (GSA), Tech. Rep.,
February 2010.
[2] “Fully integrated RF front-end receiver for GPS
applications, STA5620Data Sheet,” STMicroelectronics, 2008.
[3] “Single-Chip Global Positioning System Receiver Front-End,
MAX2742Data Sheet,” Maxim, 2008.
[4] G. Wistuba, A. Vasylyev, S. Haas, J. Driesen, L. Dalluge, D.
Peitscher,B. Kramer, C. Dohmen, and F. Henkel, “A highly integrated
configurableGNSS receiver frontend design for high bandwidth
operation on E1/L1and E5a/L5,” in Localization and GNSS (ICL-GNSS),
2011 InternationalConference on, June 2011, pp. 164 –168.
[5] G. Rivela, P. Scavini, D. Grasso, M. Castro, A. Calcagno, G.
Avellone,A. Di Mauro, G. Cali, and S. Scaccianoce, “A low power RF
front-end for L1/E1 GPS/Galileo and GLONASS signals in CMOS
65nmtechnology,” in Localization and GNSS (ICL-GNSS), 2011
InternationalConference on, June 2011, pp. 7 –12.
[6] D. Chen, W. Pan, P. Jiang, J. Jin, J. Wu, J. Tan, C. Lu, and
J. Zhou,“Reconfigurable dual-channel tri-mode all-band RF receiver
for nextgeneration GNSS,” in Proceedings of the Solid State
Circuits Conference(A-SSCC) 2010 IEEE Asian, 2010.
[7] Y. Moon, S. Cha, G. Kim, K. Park, S. Ko, H. Park, J. Park,
and J. Lee, “A26mW dual-mode RF receiver for GPS/Galileo with
L1/L1F and L5/E5abands,” in SoC Design Conference, 2008. ISOCC ’08.
International,vol. 01, Nov. 2008, pp. I–421 –I–424.
[8] N. Qi, Y. Xu, B. Chi, Y. Xu, X. Yu, X. Zhang, and Z. Wang,
“Adual-channel GPS/Compass/Galileo/GLONASS reconfigurable
GNSSreceiver in 65nm CMOS,” in Custom Integrated Circuits
Conference(CICC), 2011 IEEE, Sept. 2011, pp. 1 –4.
[9] A. Ruegamer, S. Urquijo, and G. Rohmer, “Multi-band GNSS
Front-end Architecture Suitable for Integrated Circuits,” in
Proceedings of the2010 International Technical Meeting of The
Institute of Navigation -ION ITM 2010, January 25 - 27, 2010, San
Diego, CA, 2010.
[10] C. Mongredien, M. Overbeck, and G. Rohmer, “Development
andIntegration of a Robust Signal Tracking Module for the
Triple-FrequencyDual-Constellation GAMMA-A Receiver,” in
Proceedings of the 23thInternational Technical Meeting of the
Satellite Division of the Instituteof Navigation, ION GNSS 2010,
Portland, Oregon, September 20-24,2010.
[11] A. Ruegamer, C. Mongredien, S. Urquijo, and G. Rohmer,
“OptimalPath-Control for Dual-Frequency Overlay GNSS Receivers,” in
Local-ization and GNSS (ICL-GNSS), 2011 International Conference
on, June2011, pp. 158 –163.
[12] A. Shahani, D. Shaeffer, and T. Lee, “A 12-mW wide dynamic
rangeCMOS front-end for a portable GPS receiver,” Solid-State
Circuits, IEEEJournal of, vol. 32, no. 12, pp. 2061–2070, 1997.
[13] D. Shaeffer, A. Shahani, S. Mohan, H. Samavati, H. Rategh,
M. delMar Hershenson, M. Xu, C. Yue, D. Eddleman, and T. Lee, “A
115-mW,0.5-µm CMOS GPS receiver with wide dynamic-range active
filters,”Solid-State Circuits, IEEE Journal of, vol. 33, no. 12,
pp. 2219–2231,1998.
[14] F. Ellinger, Radio Frequency Integrated Circuits and
Technologies.Springer, 2007.
[15] M. Detratti, E. Lopez, E. Perez, and R. Palacio, “Dual-Band
RF Front-End Solution for Hybrid Galileo/GPS Mass Market
Receivers,” inConsumer Communications and Networking Conference,
2008. CCNC2008. 5th IEEE, Jan. 2008, pp. 603–607.
59
Main MenuAttendeesTable of Contents2012 IEEE/ION Position,
Location and Navigation SymposiumSession A1: High-Performance
Inertial Sensor TechnologiesIntelligent Polynomial Curve Fitting
for Time-Domain Triggered Inertial DeviceAngular Motion and
Attitude Estimation Using Fixed and Rotating Accelerometers
ConfigurationBreakthrough in High Performance Inertial Navigation
Grade Sigma-Delta MEMS AccelerometerHigh Performance Gyro with Fast
Startup Time, High Range, Wide Bandwidth, Low Noise and Excellent
Vibration Immunitymilli-HRG Inertial Navigation SystemAtom
Interferometric Gravity Gradiometer System
Session B1: Receiver & Antenna Technology IA High
Sensitivity VDFLL Utilizing Precise Satellite Orbit/Clock and
Ionospheric ProductsAdvanced Signal Processing Scheme for GNSS
Receivers Under Ionospheric ScintillationAn Integrated Overlay
Architecture Based Multi-GNSS Front-endCombined Doppler and
Time-Free Positioning Technique for Low Dynamics ReceiversE-textile
Microstrip Patch Antennas for GPSGeneralization of the Code
Tracking Performance Theory to Receivers using Non-Standard Local
ReplicasImplementation of a Multi-constellation and Multi-mode
Navigation Terminal Equipment
Session C1: Indoor Personal & First-Responder
NavigationRapid Mesh Network Setup for Indoor RF TrackingGLANSER:
Geospatial Location, Accountability, and Navigation System for
Emergency Responders - System Concept and Performance
AssessmentScenario-based Evaluations of High-accuracy Personal
Positioning SystemsMaps-based Angular PDFs used as Prior Maps for
FootSLAMOpportunistic Radio SLAM for Indoor Navigation using
Smartphone SensorsUnscented Kalman Filter and Magnetic Angular Rate
Update (MARU) for an Improved Pedestrian Dead-ReckoningFoot-Mounted
INS for Everybody-An Open-Source Embedded Implementation
Session D1: Aviation Positioning & Navigation Applications
IInvestigation of APNT Optimized DME/DME Network Using Current
State-of-Art DMEs: Ground Station Network, Accuracy, and
CapacityTropospheric Error Modeling for High Integrity Airborne
GNSS NavigationTesting of a Statistical Approach to Local
Ionospheric Disturbances DetectionDifferential RAIM and Relative
RAIM for Orbit Ephemeris Fault DetectionGNSS-based Curved Landing
Approaches with a Virtual ReceiverPerformance Study of a New
Crosslink-aided User Range Accuracy (URA) Integrity Monitor
Algorithm for LPV-200A New Cascade Method for Detecting GPS
Multiple Outliers Based on Total Residuals of Observation
EquationsEnhanced Low Visibility Operations - Increasing Flight
Operations Services in the National Airspace Systems in Low
Visibility Conditions
Session A2: Low-Cost Inertial Sensor
TechnologiesHigh-Performance, Low Cost Inertial MEMS: A Market in
Motion!Parameter Study of Loosely Coupled INS/GNSS Integrity
PerformanceCharacterization and Control of a High-Q MEMS Inertial
Sensor using Low-cost HardwareA Novel Optimal Redundant Inertial
Sensor Configuration in Strapdown Inertial Navigation SystemHigh-Q
and Wide Dynamic Range Inertial MEMS for North-Finding and Tracking
ApplicationsNovel Mismatch Compensation Methods for
Rate-integrating GyroscopesMiniature IMU/INS with Optimally Fused
Low Drift MEMS Gyro and Accelerometers for Applications in
GPS-denied Environments
Session B2a: Atmospheric Effects & ModelingEvolution to
Modernized GNSS Ionospheric Scintillation and TEC
MonitoringTime-Frequency Analysis of Ionosphere Scintillations
Observed by A GNSS Receiver Array
Session B2b: Receiver & Antenna Technology IIAdaptive Code
Tracking Loop Design for GNSS ReceiversTowards a Robust
Multi-Antenna Mass Market GNSS Receiver
Session C2: Urban Personal & Vehicular NavigationParticle
Filter Based Positioning with 3GPP-LTE in Indoor EnvironmentsSystem
Parameters Testing Methodology for ITS Applications of GNSS
SystemsTracking in Dynamic Anchorless Wireless Networks Based on
Manifold FlatteningA Robust Pedestrian Dead-reckoning Positioning
Based on Pedestrian Behavior and Sensor ValidityCooperative
Navigation in Transitional EnvironmentsA Near-Far Effect Canceller
for GPS High Sensitivity Receiver
Session D2: Aviation Positioning & Navigation Applications
IIInterference Characteristics for the Civil Airport Environment
using Time-Frequency AnalysisMultipath Study On The Airport
SurfaceAlgorithm for the Detection and Isolation of Systemic
Measurement Errors in Vision Based/Aided Navigation
SystemsReal-time Estimation of Projectile Roll Angle using
Magnetometers: In-flight Experimental ValidationRadar Altimeter as
a Navigation Aid Using Hierarchical Elevation Map ClusteringThe
GNSS Signal Phase Measurement to Determine the Trajectory
Disturbances for a Small Air Vehicle
Session A3: Multisensor Integrated Systems & Sensor Fusion
Technologies IAn Adaptive Unscented Kalman Filter for Tightly
Coupled INS/GPS IntegrationApproaches to Evaluate and Improve
Short-term Relative Accuracy of GPS/INS SystemsIndoor Positioning
Through Integration of Optical Angles of Arrival with an Inertial
Measurement UnitRobust Height Tracking by Proper Accounting of
Nonlinearities in an Integrated UWB/MEMS-based-IMU/Baro SystemRange
Sensor Aided Inertial Navigation Using Cross Correlation on the
Evidence GridThe IMRE Kalman FILTER - A New Kalman Filter Extension
for Nonlinear ApplicationsSINS/GPS/CNS Information Fusion System
Based on Improved Huber Filter with Classified Adaptive Factors for
High-speed UAVs
Session B3: Interference, Spectrum Issues & Robust
NavigationCompatibility Analysis Between LightSquared Signals and
L1/E1 GNSS ReceptionDevelopment and Demonstration of a TDOA-Based
GNSS Interference Signal Localization SystemA USRP-Based GNSS and
Interference Signal Generator and Playback SystemGNSS Spoofing
Detection in Handheld Receivers Based on Signal Spatial
CorrelationMulti-Satellite Time-Delay Estimation for Reliable
High-Resolution GNSS ReceiversA Multiple-frequency GPS Software
Receiver Design Based on a Vector Tracking Loop
Session C3: Vision/Integrated Navigation Systems for Indoor
ApplicationsEfficient Outlier Removal in Vision Based
NavigationImproved Fusion of Visual Measurements Through Explicit
Modeling of OutliersInertial and Imaging Sensor Fusion for Image
Aided Navigation with Affine Distortion PredictionExploiting Ground
Plane Constraints for Visual-aided Inertial NavigationFusing Visual
Tags and Inertial Information for Indoor NavigationCHAMELEON:
Visual-inertial Indoor NavigationOptical Flow Measurement of Human
Walking
Session D3: Consumer Positioning & Smartphone Navigation
TechnologyUsing Inertial Sensors of iPhone 4 for Car NavigationWiFi
AP Position Estimation using Contribution from Heterogeneous Mobile
DevicesAn Empirical Solar Radiation Pressure Model for Autonomous
GNSS Orbit PredictionUsing Unlocated Fingerprints in Generation of
WLAN Maps for Indoor Positioning3D Personal Navigation in Smart
Phone using Geocoded ImagesAn Adaptive Map-Matching Based on
Dynamic Time Warping for Pedestrian Positioning using Network
Map
Session A4: Multisensor Integrated Systems & Sensor Fusion
Technologies IIPerformance Investigation of Barometer Aided
GPS/MEMS-IMU IntegrationUse of Magnetic Quasi Static Field (QSF)
Updates for Pedestrian NavigationA Quaternion-based Initial
Orientation Estimation System Suitable for One Special Dynamic
State Using Low Cost Magnetometers and
AccelerometersLoosely-Coupled GPS-INS State Estimation in Precision
ProjectilesModeling with Noises for Inertial Sensors:Circular Data
Processing Tools Applied to a Phase Open Loop Architecture for
Multi-Channels Signals Tracking:
Session B4: Precise Positioning, Multlipath Mitigation &
Advanced Processing AlgorithmsFixed Ambiguity Precise Point
Positioning (PPP) with FDE RAIMHigh-precision GNSS Orbit, Clock and
EOP Estimation at the United States Naval ObservatoryIntegrity Risk
of Cycle Resolution in the Presence of Bounded FaultsSynthetic
Aperture Navigation Algorithms Applied to a Driving User in
Multipath EnvironmentsBounding Integrity Risk Subject to Structured
Time Correlation Modeling UncertaintyUrban Multipath Detection and
Mitigation with Dynamic 3D Maps for Reliable Land Vehicle
LocalizationA Novel Bayesian Ambiguity Resolution Technique for
GNSS High Precision PositioningTrajectory Estimation Improvement
Based on Time-series Constraint of GPS Doppler and INS in Urban
AreasM-Epoch Ambiguity Resolution Technique for Single Frequency
Receivers with INS Aid
Session C4: Vision/Integrated Navigation for Vehicular &
Robotic ApplicationsReal-time Implementation of Visual-aided
Inertial Navigation Using Epipolar ConstraintsCollaborative Image
Navigation Simulation and Analysis for UAVs in GPS Challenged
ConditionsFilter-Based Calibration for an IMU and Multi-Camera
SystemLane Detection Based on a Visual-Aided Multiple Sensors
PlatformBundle Adjustment Without Iterative Structure Estimation
and its Application to NavigationAn Efficient Refinement for
Relative Pose Estimation with Unknown Focal Length from Two
ViewsGraph-Based Cooperative Navigation Using Three-View
Constraints: Method ValidationArchitecture for Asymmetric
Collaborative Navigation
Session D4: Maritime Positioning & Navigation
ApplicationsShip Attitude Accuracy Trade Study for Aircraft
Approach and Landing OperationsPrecise Determination of Sediment
Dynamics Using Low-cost GPS FloatersHeading-determination using the
Sensor-fusion Based Maritime PNT UnitA New Method of Initial
Alignment and Self-calibration Based on Dual-axis Rotating
Strapdown Inertial Navigation SystemAn Automatic Compensation
Method for States Switch of Strapdown Inertial Navigation
SystemFour-position Drift Measurement of SINS Based on Single-axis
Rotation
Session A5: Sensor Manufacturing, Error Modeling &
TestingStatistical Modeling of Rate Gyros and
AccelerometersHoneywell Micro Electro Mechanical Systems (MEMS)
Inertial Measurement Unit (IMU)Inertial Sensors: Further
Developments in Low Cost Calibration and TestingA Framework for
Inertial Sensor Calibration Using Complex Stochastic Error
ModelsEstimation of Deterministic and Stochastic IMU Error
ParametersAnalysis of Coning Motion Caused by Turntable's Vibration
in Rotation Inertial Navigation System
Session B5: Modernized GNSSCharacterizing the GNSS Correlation
Function using a High Gain Antenna and Long Coherent Integration -
Application to Signal Quality MonitoringSpectral Compatibility of
BOC(5,2) Modulation with Existing GNSS SignalsRange Domain
Auto-regression Method on Generalized Multivariate Time-varying
Series AnalysisFMT Signal Options and Associated Receiver
Architectures for GNSSStaggered InterplexOn Generalized
Multidimensional Geolocation Modulation Waveforms
Session C5: Weak Signal ProcessingA Novel Quasi Open Loop
Frequency Estimator for GNSS Signal TrackingA Weighted Combing
Method for GNSS Antenna DiversityCharacterization of the Impact of
Indoor Doppler Errors on Pedestrian Dead ReckoningTechnique for MAT
Analysis and Performance Assessment of P2P Acquisition
EnginesNon-Coherent, Differentially Coherent and Quasi-Coherent
Integration on GNSS Pilot Signal Acquisition or Assisted
AcquisitionThe Use of High Sensitivity GPS for Initialization of a
Foot Mounted Inertial Navigation System
Session D5: Terrestrial Positioning & Navigation
ApplicationsA Location-Based Services System (LBSS) Designed for an
ArboretumIncreased Ranging Capacity using Ultra-Wideband
Direct-path Pulse Signal Strength with Dynamic RecalibrationUnknown
Source Localization using RSS in Open Areas in the Presence of
Ground ReflectionsPerformance Analysis of a Civilian GPS Position
Authentication SystemCollaboration-Enhanced Receiver Integrity
Monitoring with Satellite EstimationUsing the Microsoft Kinect for
3D Map Building and TeleoperationIntegrated INS/GPS for Camera
Tracking in Large Scale Outdoor Cinematic Applications
Session A6: Emerging & Alternative Sensor Technologies &
Precision Timing SystemsA Consistent Zero-Configuration GPS-Like
Indoor Positioning System Based on Signal Strength in IEEE 802.11
NetworksA Segmentation-based Radio Tomographic Imaging Approach for
Interference Reduction in Hostile Industrial
EnvironmentsImprovement of TERCOM Aided Inertial Navigation System
by Velocity CorrectionCompact Atomic Magnetometer for Global
Navigation (NAV-CAM)Cold Atom Micro Primary Standard (CAMPS)Factors
Influencing the Noise Floor and Stability of a Time Domain Switched
Inertial DeviceDevelopment of a Test Bed for UWB Radio Indoor
Localization of First Responders
Session B6: GNSS Augmentation SystemsAutomated Verification of
Potential GPS Signal-In-Space Anomalies Using Ground Observation
DataAssessment of Integrity Monitoring Test-bed Module for the
Airport EnvironmentDetecting Ionospheric Gradients for GBAS Using A
Null Space MonitorDetermining and Measuring the True Impact of C/A
Code Cross-correlation on Tracking - Application to SBAS
GeorangingAutomated Determination of Fault Detection Thresholds for
Integrity Monitoring Algorithms of GNSS Augmentation SystemsThe
Application of the Time Series Theory to Processing Data from the
SBAS Receiver with Safety of Life ServiceGPS-III L1C Signal
Reception Demonstrated on QZSS
Session C6: Terrestrial Radionavigation & RF-PositioningASF
Quality Assurance for eLoranA Terrestrial Positioning and Timing
System (TPTS)WPI Precision Personnel Locator: Inverse Synthetic
Array Reconciliation TomographyJoint Location and Parameter
Tracking of Mobile Nodes in Wireless NetworksAccuracy Indicator for
Fingerprinting Localization SystemsConstructing a Continuous Phase
Time History from TDMA Signals for Opportunistic NavigationNext
Generation Low Frequency Solutions for Alternative Positioning,
Navigation, Timing, and Data (PNT&D) Services and Associated
Receiver TechnologyRSSI Ranging Model and 3D Indoor Positioning
with ZigBee Network
Session D6: Robotic Positioning, Navigation, Control &
Sensor TechnologyAn Analysis of Observability-constrained Kalman
Filtering to Vision-aided NavigationCharacterization of
Non-Line-of-Sight (NLOS) Bias via Analysis of Clutter
TopologyIn-Cabin Localization Solution for Optimizing Manufacturing
and Maintenance Processes for Civil AircraftMobile ad-hoc
Communication in Machine Swarms for Relative Positioning Based on
GNSS-raw Data ExchangeLow Cost IMU Based Indoor Mobile Robot
Navigation with the Assist of Odometry and Wi-Fi Using Dynamic
ConstraintsStudy on the Use of Microsoft Kinect for Robotics
ApplicationsRelative Navigation for Formation Flying Spacecrafts
Using X-ray PulsarsSAR Image Processing Using Super Resolution
Spectral Estimation with SVD-Periodogram Method
Author IndexCopyrightHelpPrintSearchExit
HistoryItem_V1 AddNumbers Range: all pages Font: Times-Roman
10.0 point Origin: bottom centre Offset: horizontal 0.00 points,
vertical 36.00 points Prefix text: '' Suffix text: '' Use
registration colour: no
BC 50 TR 1 0 629 187 0 10.0000 Both 10 1 AllDoc
CurrentAVDoc
0.0000 36.0000
QITE_QuiteImposingPlus2 Quite Imposing Plus 2.9b Quite Imposing
Plus 2 1
0 10 9 10
1
HistoryList_V1 qi2base
Button1: