-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
1/16
MATHEMATICS IN ENGINEERING, SCIENCE AND AEROSPACE
MESA - www.journalmesa.com
Vol. 4, No. 3, pp. 249-264, 2013
c CSP - Cambridge, UK; I&S - Florida, USA, 2013
An aeroelastic model for horizontal axis wind turbines
Florin FRUNZULICA1,, Alexandru DUMITRACHE2, Horia
DUMITRESCU2
1 POLITEHNICA University of Bucharest, Faculty of Aerospace
Engineering, Polizu 1-6, RO-
011061, Bucharest, Romania,
2 Gheorghe Mihoc - Caius Iacob Institute of Mathematical
Statistics and Applied Mathematics,
P.O. Box 1-24,RO-010145, Bucharest, Romania.
Corresponding Author.E-mail: [email protected]
Dedicated to the memory of late Professor Mihai Popescu.
Abstract. In this paper an advanced aeroelastic numerical tool
for horizontal axis wind turbines
(HAWT) is presented. The tool is created by coupling an unsteady
aerodynamic model based on the
vortex method (using the vortex ring model for the lifting
surface coupled with an unsteady free-wake
vortex particle model) with an elastodynamic model based on the
beam approximation. The coupling
is non-linear in the sense that at every time step the two
models interact through data transfer from
the one to the other. The aeroelastic model is evaluated through
comparisons of its predictions with
experimental data as well as with predictions obtained by
simpler models.
1 Introduction
The design problem of horizontal axis wind turbines is related
to a number of physical processes of
varying complexity. Due to the non-linear as well as stochastic
(in some aspects), nature of these
processes, a number of simplifications have been introduced up
to now. Most of them lead to the
decoupling of the various processes in order to treat them
separately. In this connection, there are two
dominant model problems: the aerodynamic problem and the
elastodynamic one. Their combinationleads to the aeroelastic
problem of a horizontal axis wind turbine (HAWT)[1]. Input to this
problem is
the wind inflow conditions. The solution of the aerodynamic and
aeroelastic problems can be used to
provide useful information to a number of design problems. Thus,
the post-processing of the results
can lead to a fatique and reability analysis, the analysis of
wake effects for the design of wind parks,
the prediction of power fluctuations, etc.
In this work, the authors present a non-linear advanced
aeroelastic model based on a vortex method
as regards the aerodynamics, and a beam structural model adapted
to this problem.
2010 Mathematics Subject Classification: 76G25, 74B20, 74S05
Keywords: vortex lattice method, beam theory, finite elements
method, aeroelasticity, HAWT.
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
2/16
250 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
2 The numerical method
The key point of the approach adopted herein is based on the
formulation of the aeroelastic problemas an appropriate coupling of
two different problems: the aerodynamic and the elastodynamic.
In
brief, the aerodynamic part aims at the calculation of the loads
exercised on the structure due to the
dynamics of the surrounding fluid.
The loads are then introduced as forcing to the elastodynamic
equations where from the defor-
mations, the rates of deformations and the accelerations are
calculated along the blade. The rates of
deformations are feed back into the aerodynamic part as excess
body velocities of the blade (in addi-
tion to the rigid body motions). This results in a modification
of the non-entry boundary condition for
the aerodynamic part that represents the effects of flexibility
on the fluid dynamics.
Regarding the wind turbine and its surrounding fluid as one
mechanical system, it is clear that
the procedure just outlined defines a two-way channel of
communication between the two parts of
the system. This communication is achieved by means of two
interfaces: one for the transfer of theaerodynamic loads from the
aerodynamics to the elastodynamic part, and one for the transfer of
the
rats of deformations from the elastodynamics to the aerodynamic
part. Note that in both cases the data
that are transferred concern solely the solid surface of the
blades, i.e. the domain of contact between
and the solid part of the system. This is always the case
regardless the type of approximation used
for the either the fluid or the solid. In what follows, the flow
problem is approximated by a free-wake
aerodynamic model, whereas the elastic part is modeled by the
beam approximation.
2.1 The aerodynamic model
For rotor computations, the blades element momentum methods are
easily understandable and appli-
cable, using minimum computation requirements [1,2]. Anyhow,
there are cases when these methodsdo not provide the desired
precision. The design interest cases include asymmetric aerodynamic
un-
steady flow (especially the dynamic effects of incident flow).
An evident alternative is the detailed
computation of the induced velocities field, based on the wake
vortex distribution [3,4,5,6]. The
vortex methods are interesting, even while requiring significant
computation resources, due to their
possibility to observe the vortex systems main structure. In the
following sections, we will present
a calculation algorithm where the near-wake strip elements are
transformed into vortex particles and
become part of the far-wake. Integrating the vorticity of each
near-wake dipole element produces a
vortex particle. The new vortex particles became part of the far
wake which evolves prior to the next
time step using a Lagrangean description of the flow .
Hypothesis.The working fluid is a continuous barotropic ideal
fluid which fills an unlimited,
simple, contiguous domain
. In the flow is adiabatic and non-rotational, where =
R.The domainR is the rotational flow domain (i.e. for a blade
this is represented by the solid bladesurface and the wake flow-
field domain).
The blades have a rotational motion related to the reference
system attached to the airflow speed
direction. In the calculation points the velocity is given by
sum of three components: the cinematic
velocity corresponding to blade motion, the induced velocities
and the wake induced velocities. The
generated free wake is attached to the leading edge of the
blade.
The time steps are chosen so that vortexes generated by the
trailing/leading edge should not trans-
ported on distance greater than the smallest panel
dimension.
The Vortex Lattice Method (VLM).When the blades lifting surface
has a relatively reduced thick-
ness (valid for most free rotor blades) it might be selected a
scientific method requiring the vortex ring
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
3/16
An Aeroelastic Model for HAWT 251
distribution on a surface built by means of the generatrix
camber line. Therefore the numeric calcula-
tion can determine the pressure jump p= pi pe between upper and
lower surfaces.
Figure 1 shows the blade decomposing into panels. The vortex
element on the panel at front edge islocated at of the panels
chord, while the collocation point is located at of panels chord.
Numerically,
the vortex rings are stored in a matrix with the indexes i and
j. Each vortex ring is perfectly sitting on
the mean wing surface, to enable a correct representation from
the mathematical point of view. The
induced velocity in a control pointP is calculated with the
Biot-Savart formula [3].
Fig. 1 Discretization of the blade into panels (a) and vortex
rings distribution (b).
To determine the vortex rings intensities, i,j, it will be
imposed that the resulting speed in the
calculation point shall be tangent to the mean blade
surface:
(M
i=1
N
j=1
(Vind,P(t,i,j))i,j+Mw,T E
i=1
N
j=1
(Vw,P(t,i,j))i,j+
Mw,T E
j=1
Vw,P(t,j)) nP=Vk,P(t) nP (2.1)
whereMand Nare the number of panels along the chord,
respectively along the wing span, Mw,T Erepresent the number of
free vortexes in each closed wake strip generated by the trailing
edge and
Mw,T Erepresent the number of particles generated in the wake by
the trailing edge (the formula (1)
includes the wake separation at leading edge for high angle of
attack). Numerically, we will consider
a finite wake (about 3 rotor diameters). Vortexes generated at
the leading and trailing edges for each
nearby adjacent panel will change their intensity in time and
will move in space with local airflow
speed. Equation (2.1) provides (at each time step) a linear
algebraic system A = b. Solving thissystem by an exact or iterative
method enables to determine the vortex rings intensity
i,j,i=1,...,M,
j=1...N. MatrixAis the influence coefficients matrix, while
vector bis the right side of equation (2.1).
Leading Edge Wake Model.To take into account the leading edge
stall there is necessary to know
the wake vortex near the leading edge at any time. Physically
the phenomenon is a consequence of
high incidence viscous flow and to introduce it in the numerical
algorithm the ONERA method applies
[1,7]. This gives the changes of the s circulation, while on
blade elements (element strips along the
chord), under stall conditions, by solving a second order
differential equation:
s+
s+
r
2s=
r
2VtCL
E
Vn (2.2)
where =2Vt/c,c is the blade element chord, Vtis the velocity
component along the chord,Vnis thechord normal velocity component,
CL is the lift coefficient difference between potential flow
and
stationary flow. Dumitrescu et al. present in detail the empiric
coefficients r,E,[1].To determine CLit is necessary to find out
each blade elements local angle of incidence. Usually,
this is the global angle of incidence for a flow completely
attached to the blade.
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
4/16
252 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
The differential equation (2.2) applied for each blade element
enables determination of the first
vortex ring in the leading edge generated wake, representing the
support of the wake particles carrying
vortices.T ELE= (at+s) (2.3)
where T E is the trailing edge circulation, while at is
circulation corresponding to the flow fully
attached along the local blade strip.
The Trailing Edge Wake Model.Expressing the (far) wake with
particles means that each particle
is defined by its position xi, its vortices i and its kernel
radius i [4,7]. Thus, the local vorticity in
wake can be determined with the formula:
w(x, t) =i
i(t) g (xxi(t) ,i(t)) (2.4)
where g represents the vortices distribution function for the
particle i (i= 1...Nw,p), while i is the
length defining the particle kernels support domain. In
three-dimensional space, the function g hasthe expression [5]:
g (r,) = 3
43exp
(|r|/)3
(2.5)
Thus, the speed induced in a point by a set of particles will
be:
Vw(x, t) = 1
4
w
(xx)w(x, t)
|xx|3 d =
1
4
Nw,p
i=1
i(t) (xxi)
|xxi|3
f(xxi,i) (2.6)
where: f(r,) =1 exp(|r|/)3
.
Therefore, the evolution of a vortex lattice is reduced to the
calculation of a particles assembly, j:
Dxj(t)
Dt=V (xj, t) ,
Dj(t)
Dt= (j(t) ) V (xj, t) (2.7)
whereV is the total fluid velocity in the point xj.
For a time period t, the Adams-Bashforth formula is
approximating the trajectory of a fluid
particle:
xj(t+t) =xj(t) + [1.5V (xj(t) , t)0.5 V (xj(tt) , tt)] t
(2.8)
Changing a particles kernel radius due to viscous diffusion is
similarly to the viscous diffusion of
a vortex filament in a plan perpendicularly to this
filament:
D
Dt =
c2
2t , c=2,242 (2.9)
with the kernel radius at time,t+tdetermined by the
relation:
|t+t|=|t| (t/t+t)2
(2.10)
In applications, the near wake is including a single vortex ring
line, usually the one generated by
the trailing edge TE(a similar approach is available also for
the leading edge ,LE, wake). Figure 2
shows the particles transforming algorithm.
At the time momentt,calculation to solving the systemA = b,
provides the circulation intensityof the vortex ring tm1,jand of
the neighbor rings, the location of the cross points 1 and 2 being
from
the previous time step:
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
5/16
An Aeroelastic Model for HAWT 253
Fig. 2 Generation of aTEvortex ring (a), convection and
transformation in an equivalent particle (b).
x1=xm,j+ Vttm,j t , x2=xm,j+1+ V
ttm,j+1t (2.11)
On the edges 14 and 23, the effective circulation is equally
distributed between the panels adja-cent to these edges, while on
edge 12 the circulation is provided by the difference between
current
intensities and those of the previous time moment. The new
positions of the cross points defining the
panel 1234 is determined for each time step with the
equation:
x i=xi+ Vtit, i=1,2,3,4 (2.12)
IfSis the panelSvorticity (in its new position), S(x) =Sdx, then
the particlesjvorticity
associated to panel,S, is determined with the relation:
j=
SSd (2.13)
while the particles position in time will be determined with the
relation:
xjj=
SxSd (2.14)
The transport of the new particlejis further done according to
the equations (2.7).
Blade pressure calculation.To determine the pressure difference
on the blade we will decompose
the local velocity V on the blade surface, panel (i,j), related
to two directions: i (tangent direction
oriented along the chord) and tauj (tangent direction along the
span). Defining the characteristic
length for a panel (i,j) along the chord and the span, ci,j
andbi,j, the pressure difference will be
provided by the equation [1,3]:
pi,j= (Vp)i,j ii,ji1,j
ci,j+ (VP)i,j j
i,ji,j1
bi,j+i,j
t (2.15)
while the force on the panel (i,j) will be provided by:
Fi,j=pi,jni,jSi,j= Di,ji +Fyi,jj +Li,jk (2.16)
The next phase of the aerodynamic computation consists of
calculations of blade forces. The first
is the tangential force per unit blade length Ftacting along the
chord line of a blade element in the
direction of motion. The second is the normal force per unit
blade lengthFnacting in the direction of
the unit vector normal to the chord line. A complete set of two
dimensional aerodynamic forces would
also include a pitching moment about the spanwise axis. In
general this moment is small and is thus
neglected. From (2.16) we can compute in spanwise direction,
lift coefficient CL and drag coefficient
CD(including given airfoil drag and locally induced drag).
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
6/16
254 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
2.2 The elastodynamic model
The aspect ratio of wind turbine blades is, usually large and,
therefore, beam theory can be used
to describe, the elastodynamic behaviour of the blade. Let O
[Xe,Ye,Ze]denote the beam coordinatesystem.and it is assumed that
the elastic axis is straight and coincides with axisYe.
The beam theory. In this model three types of deformations are
introduced: x(y)- the bendingdeformation along Ye direction
(flapwise bending),z(y)- the bending deformation alongZe
direction(leadwise bending) andy(y)- the spanwise torsional
deformation [8,9].
According to the linear beam theory, the equations for the
equilibrium of forces and moments in
the(X Z)eplane are as follows:
2
y2
EIz
2xy2
+
2xt2
zcm2yt2
+ fxa+fxg+fxc= 0 (2.17)
2
y2
EIx
2
zy2
+
2
zt2 xcm
2
yt2 + fza+fzg+fzc=0 (2.18)
y
GIt
yy
Ip2yt2
+xcm2zt2
zcm2xt2
+ mya+ myg+ myc= 0 (2.19)
where:E(y)- the Young modulus (N/m2),G (y)- the shear modulus
(N/m2), (y)- the linear density(kg/m), xcm- the distance of the
mass center from Ze axis (m), zcm- the distance of the mass
centerfromXe axis (m),Ix(y)- the moment of inertia about Xe axis
(m
4),Iz(y)- the moment of inertia aboutZe axis (m
4), Ip(y)- the polar moment of inertia about the elastic center
(m4),It(y)- St. Venant tor-
sional moment of inertia (m4), f(y)the bending distributed loads
(N/m),m(y)the distributed torque(Nm/m), and subscripts a, g, c
denotes the aerodynamic loads, gravitational loads and
centrifugalloads respectively.
The first step in structural computation is to calculate beam
cross-sectional properties of thin-
walled beam, multi-cell, nonhomogeneous, closed sections, within
the framework of Bernoullis
bending theory and St. Venant torsion theory [8,9]. The key idea
is the approximation of the airfoils
shape byne straight, homogeneous elements. The thickness of
every element is considered constant
and is evenly distributed across the two sides of its midline.
For each element, the following data
are necessary:Ee,Ge moduli (N/m2), densitye (kg/m
3), thicknesste(m), coordinates of element in
plane(X1e,Z1e)and(X2e,Z2e)(figure 3).
Fig. 3 The discretized airfoil.
At the beginning, the coordinates(X1e,Z1e) and (X2e,Z2e)can be
given with respect to any co-ordinate system (figure 2), but after
the calculation of the elastic center coordinates, we switch to
the
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
7/16
An Aeroelastic Model for HAWT 255
elastic coordinate system. Following the notations of figure 2,
the section characteristics are obtained
as follows:
Le=
(X2e X1e)2
+ (Z2e Z1e)2
, Ae= Le te, A=
ne
e=1Ae (2.20)
E=ne
e=1
EeAe/A, G=ne
e=1
GeAe/A (2.21)
=ne
e=1
eAe (2.22)
xel=ne
e=1
EeAe(X1e+X2e)
2
1
EA, zel=
ne
e=1
EeAe(Z1e+Z2e)
2
1
EA(2.23)
where Ae is the elements area, Le is the elements length, and
((xel,zel )) are the coordinates of the
elastic center. Now, the whole analysis is referred to the
elastic coordinate system. The remainingsectional properties are
defined as follows:
Xcm=ne
e=1
eAe(X1e+X2e)
2
1
A, xcm=Xcm xsc
Zcm=ne
e=1
eAe(Z1e+Z2e)
2
1
A, zcm=Zcm zsc (2.24)
where(Xcm,Zcm)are the coordinates of the mass center in the
elastic coordinate system, and (xsc,zsc)are the coordinates of the
shear center in the elastic coordinate system. The calculation of
the shear
center will be described later.
St. Venant torsional constant It. The St. Venant torsional
constant of a section is defined as:
It= Mt/(G) (2.25)
whereMtis the torque that acts on the plane of the section, and
is the rate of twist due to this torque.
In the case of a thin-walled, multi-cell section, the
calculation of necessitates the calculation of
the shear flows in the skin of the section. For three cells
section (figure 4), we apply the following
equations:
-the equation of the equilibrium of moments (Bredt-Batho
formula):
2q11+ 2q22+ 2q33= Mt (2.26)
-the equations for the shear flow balance at the junctions:
q1= q4+ q2 , q2= q3+ q5 (2.27)
-and the equations for the consistency of torsional deformations
for every cell:
1= 2= 3 (2.28)
or in extended form
1
2G11(q11+ q44) =
1
2G22(q2(2+6)q44+ q55) =
1
2G33(q33 q55) (2.29)
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
8/16
256 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
where1,2,3 are the areas of cells,Gj the tangential modulus,
averaged over cell j, and
j=
Sj
ds
t =iSj
Li
ti (2.30)
The segment Sj represents the curvilinear segment where acting
the shear flow qj, j= 1,2...6.Equations (2.26)-(2.29) form a 5x5
system from which the values ofqj, j= 1,2...6, can be computed.The
torsional specific deformation of the section is equal to the
torsional specific deformation of
each one of the cells,
= 1
2G11(q11+ q44) (2.31)
and now,Itcan be obtained by equation (2.25).
Fig. 4 The shear flow for the thin-walled, three cell sections,
under twisting moment.
The shear center (SC).The shear center of the section represents
the point through which the plane
of the resultant loads must pass to prevent the development of
twisting moments on the section. Tocalculate the coordinates of the
SC we assume that a shearing force Tacts through the SC at
distance
dfrom the arbitrary reference point (the elastic center). Our
section is three-celled and is three times
statically indeterminate. We perform a cut in each cell and as
consequences the structure is reduced
to the thin-walled open section. To restore continuity at every
cut, a supplementary shear flow is
introduced in celli:
qj= qj0+ qj (2.32)
whereq j0 is the shear flow at any point of cell j assuming cuts
at all cells, and qj is the constant
shear flow which is developed if we close the cut of cellj. The
shear flowqj0 is defined as [9]:
qj0=IxTx IxzTz
IxIz I2
xz
Qz IzTz IxzTx
IxIz I2
xz
Qx (2.33)
where
Ixz= 1
E
ne
e=1
EeAeX1e+X2e
2
Z1e+Z2e2
(2.34)
and
Qz= 1
E
s0
E(s)x t(s)ds, Qx= 1
E
s0
E(s)z t(s)ds (2.35)
In equation (2.33),Qxand Qzare the only quantities which change
from point to point.
We evaluate the shear flowqj0 from the cut whereqj0=0 (the
inferior limit of integrals (2.35))and we continue moving along the
correspondent line until we meet a junction. In junction we
apply
a balance of shear flow (figure 5); for exemplification, in
junction 1 we have
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
9/16
An Aeroelastic Model for HAWT 257
Fig. 5 The shear flow for the thin-walled, three cell sections,
under shear load.
q14=q11b q
12a (2.36)
and now, the shear flowq40 in spar web 1-4 is
q40=q14+
IxTx IxzTzIxIz I2xz
Qz IzTz IxzTx
IxIz I2xzQx
14
(2.37)
The final shear flow can be interpreted as algebraic sum of the
shear flows qj0 in the opened
section, and the corrective shear flows qj applied independently
in each cell. The total relative warping
at the three cuts is obviously zero if all cells are closed.
Thus, if the rate of twist is set equal to zero,
for cellj we have the following equation:
1
Gj
Sj
qj ds
t=
1
Gj
Sj
qjds
t
Sjk
qkds
t
Sji
qi ds
t+
Sj
qj0 ds
t
=0 (2.38)
whereSjkis the web common to cells j and k. If we denote
j0= 1
Gj
Sj
qj0 ds
t, j j=
1
Gj
Sj
ds
t, ji=
1
Gj
Sji
ds
t, jk=
1
Gj
Sjk
ds
t(2.39)
then the equation (2.38) becomes
jiqi +j jq
j+jkq
k=j0 (2.40)
and represents a 3x3 system which can be solved with respect to
qi . Now we can obtain the shear
flow distribution at any point of the section using eq. (2.32).
The moment M0 produced by the shear
flows about the arbitrary reference point (the elastic center)
is
M0=ne
e=1
qe(X1eZ2e X2eZ1e) (2.41)
whereqeis the shear flow that correspond to thee-th element.
For the x-coordinate of the shear center, an external load in
the z direction must be imposed. In
this case:
xsc=M0/Tz (2.42)
For thez-coordinate of the shear center, the load is imposed in
the x direction:
zsc=M0/Tx (2.43)
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
10/16
258 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
The finite element technique. By using Lagrange equations the
following linear equations of
motion are obtained [10,11]:
MDn+ C
Dn+ KDn= R
ext
n (2.44)where
-the matrixM=
VNTNdVis the mass matrix
-the matrixC=
VNTCNddV is the structural damping
-the matrixK=
VNTdE NddVis the stiffness matrix
-the vectorRextis the load vector
-the vector D is the displacement vector, which contains the
degrees of freedom: x - edgewise
bending, x - the bending slope at XY plane, z - flapwise
bending, z - the bending slope at ZY
plane,y - the torsional deformation at X Zplane, and
-Nd- the derivative matrix of shape function
-N- the matrix of shape function (the shape functions most
commonly used are the third-degree
polynomials and the first degree in the case of torsion).
The time advancementof the equation (2.44) with the appropriate
initial conditions is performed
with the specialized algorithm (Crank-Nicolson) method [10].
This is an unconditionally stable im-
plicit one-step method, which is second order accurate in time
and relates the displacements, veloci-
ties, and acceleration as
Dn+1=Dn+t
2
Dn+ Dn+1
, Dn+1= Dn+
t
2
Dn+Dn+1
(2.45)
Subscript n corresponds to the old time and n+1 is the new time.
t is the time step. Rearranging
equations (2.45) gives
Dn+1= 2t
(Dn+1 Dn) Dn, Dn+1= 4t2
(Dn+1 Dn) 4t
Dn Dn (2.46)
By combining equations (2.46) with the equations of motion
(2.44) at timet= tn+1, we obtain:
Ke f f Dn+1=Re f fn+1 (2.47)
where the effective stiffness matrix, Ke f f, and the effective
load vector,Re f fn+1, are, respectively,
Ke f f = 4
t2M +
2
tC + K (2.48)
and
Re f fn+1= R
extn+1+ M
4
t2Dn+
4
tDn+ Dn
+ C
2
tDn+ Dn
(2.49)
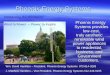
2.3 Coupling models
The solution of the aeroelastic problem requires the coupling of
an aerodynamic and an elastodynamic
model. In previous paragraphs a brief description of each part
was done separately. In this paragraph
the basic principles of the communication between the two parts
will be discussed.
As regards the elastodynamic part, the load vector must be
input. This vector is calculated by
superimposing the gravitational forces on the aerodynamic loads.
The quantities that have to be trans-
ferred from the aerodynamic part are, therefore, the aerodynamic
forces that act on the blade.
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
11/16
An Aeroelastic Model for HAWT 259
The solution of equation (2.44) yields the vector D of the
deformations, the vector D of the de-
formation rates and the vector D of the accelerations at the
nodes of the beam that simulates the
blade.The feedback to the aerodynamic part are the deformations
rates, which, in the case of non-linear
coupling, are included in the aerodynamic problem along with the
body motion velocities. This results
in a change of the effective velocity of the blade seen by the
fluid. Consequently, the angles of attack
and, therefore, the lift and drag coefficients change.
Within the context of linear elasticity, deformations are
assumed small. On the other hand, it is
not expected to encounter considerable deformations on a blade
of a wind turbine. Therefore, it is
approximately correct to retain the undeformed geometry of the
blade throughout the whole analysis.
The main modules can be summarized in the following flowchart
(figure 6):
Fig. 6 The flowchart of the coupling between aerodynamic and
elastodynamic models.
The flow chart of the aeroelastic code has the following steps:
(a) initialize code; (b) perform same
pure aerodynamic steps for the calculation of the circulation
distribution. For every time step: (c.1)
start time step; (c.2) calculate the aerodynamic forces
distribution; (c.3) calculate the force and the
velocity distribution on the blades; (c.4) perform elastodynamic
steps for a period of time equal to
aerodynamic time step; (c.5) circulation calculation step; (c.6)
go to next time step.
For a non-linear coupling, in the step c.2 the aerodynamic
forces is fulfilled including the rates of
elastodynamic deformations, which have been calculated during
the previous time step. In the case of
a linear coupling, there is no feedback from the elastodynamic
part to the aerodynamic part.
The only communication between the two parts is in step c.4
where the aerodynamic forces areimposed on the beam and the
elastodynamic problem is solved.
3 Results
3.1 Test case 1: Modal analysis ( =25rev/min)
In this numerical test we consider a reference blade [10] with
complete structure. The blade is dis-
cretized in finite elements (3094 nodes which define 2985
shells), metallic structures (figure 7). Using
the complete model and equivalent model of the blade structure,
we computed the natural frequencies
and modal forms for both models. The firsts five modes are show
comparatively in the figure 8, and
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
12/16
260 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
the correspondent frequencies are summarized in the table 1.
Table 1. The natural frequencies (Hz): beam model vs. complete
model.
Mode Completestructure
Complete structurewith centrifugal ef-
fect
Beammodel
Beam model withcentrifugal effect
Flapwise I 1,208 1,321 1,199 1,318
Flapwise II 2,985 3,23 2,921 3,221
Edgewise I 5,521 5,66 5,486 5,601
Edgewise III 9,128 9,257 9,055 9,193
Torsion I 13,951 14,877 13,804 14,698
Fig. 7 The discretized structure of the blade in finite
elements.
3.2 Test case 2: Dynamic response
In this test, we computed the dynamic response of HAWT (the same
beam model as the test case 1)
at impulsive wind speedVw= 15 m/s (nominal regime 12 m/s, = 25
rev/min) [10]. In the figure9 we show the wake development at
nominal regime. The figure 10 presents the variation of the
displacement and pitch angle at the blade tip, and flapwise and
edgewise bending moment at the
blade root, as a function of azimuth angle. The oscillations are
quickly damping, after 210 degrees.
3.3 Test case 3.
The results presented in the sequel concern the two cases of
double pitch steps for the Tjaereborg
HAWT, for which experimental data are available [12] (figure
11). The parameters used for each case
are (table 2): the inflow velocity - U (m/s), the starting time
of first pitch step t1,st(s), - the ending
time of first pitch step t1,end (s), the starting time of second
pitch step t2,st(s), the ending time of
second pitch stept2,end(s), the initial pitch angle 1 (deg), the
pitch angle after the first pitch step2(deg).
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
13/16
An Aeroelastic Model for HAWT 261
Fig. 8 The comparison of the modal forms: beam model (b) vs.
complete model (a).
Fig. 9 The free-wake of the rotor.
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
14/16
262 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
Fig. 10 Test case 2: the dynamic response at impulsive wind.1.
stationary nominal regime; 2. induced oscilation regime
(transient regime); a. flap displacement of tip blade, b.
flapwise bending moment at root blade, c. pitch angle variation,
d.
edgewise bending moment at root blade.
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
15/16
An Aeroelastic Model for HAWT 263
Table 2. Comparison between experiment and numerical
results.
Case 3.1 Case 3.2Experiment Aeroelastic
code
Experiment Aeroelastic
code
U (m/s) 12.5 12.5 8.7 8.7
t1,st (s) 4.70 14.0 2.0 21.0
t1,end(s) 6.00 15.3 2.5 21.5
t2,st (s) 34.58 24.0 32.0 34.0
t2,end(s) 35.7 25.12 32.7 34.7
1 (deg) -1.164 -1.164 -0.07 -0.07
2 (deg) -3.19 -3.19 -3.716 -3.716
Fig. 11 Comparison between experiment and aeroelastic code.
-
8/10/2019 An aeroelastic model for horizontal axis wind
turbines
16/16
264 F. Frunzulica, Al. Dumitrache, H. Dumitrescu
4 Conclusions
A complete aeroelastic tool has been presented together with its
self consistency tests and someresults. In this stage, we cannot
conclude on its accuracy. However, the experience suggests that
this
could be expected.
There are three points that must be underlined: (1) in some
tests it appeared necessary to introduce
artificial damping, (2) the coupling, within the context of
approach described, must be non-linear and
(3) the computational effort required to couple the aerodynamics
with the structural part, is small
compared to the whole.
Prospective work: we will made a most elaborate model based on
the coupling of the aerodynamic
model with a structural code based on the complete structural
model and composites materials.
Acknowledgement
Supports for this work by PCCA-PARTNERSHIP Program, with the
support of ANCS, CNDI-
UEFISCDI, project no. PN-II-PT-PCCA-2011-3.2-1670, are
gratefully acknowledged.
References
[1] Dumitrescu, H., Cardos, V, Frunzulica, F., Dumitrache, A.,
The Aerodynamics, Aeroelasticity and Aeroacoustics of
the Wind Turbines, Romanian Academy Ed, Bucharest, Romania, ISBN
978-973-27-1394-5, 2007.
[2] Dumitrescu, H., Cardos, V., Prediction of unsteady HAWT
aerodynamics by lifting line theory, International Journal
of Applied Mechanics and Engineering, Vol. 9, No. 4, p.675686,
2004.
[3] Katz, J., Plotkin, A., Low-Speed Aerodynamics, Cambridge
University Press 2001.
[4] Leonard, A., Computing three-dimensional incompressible
flows with vortex filaments, Ann. Rev. Fluid Mech., Vol.
17, p.523559, 1985.
[5] Voutsinas, S.G., Belessis, M.A., Rados, K.G., Investigation
of the yawed operation of wind turbines by means of a vor-
tex particle method, 75th Agard Fluid Dynamics Panel Symposium,
Aerodynamics and Aeroacoustics of Rotorcraft,
10-14 October 1994, Berlin, Germany.
[6] V.Cardos, F.Frunzulica, H.Dumitrescu, Al. Dumitrache: A
free-wake vortex particle method for horizontal axis
wind turbines. The 33rd Annual Congress of the American-Romanian
Academy of Arts and Sciences (ARA33, 02-
07.iun.2009, Sibiu) Proceedings, vol II, ISBN 978-2-553-01433-8,
pp.145-148.
[7] Riziotis, V.A., Voutsinas, S.G., Zervos, A., Investigation
of the yaw induced stall and its impact to the design of wind
turbines, European Union Wind Energy Conference, 20-24 May 1996,
Gteborg, Sweden.
[8] Timoshenko S., Goodier J.N.: Theory of elasticity, Mc
Graw-Hill, 1951 (1992, Ed.).
[9] Megson T.H.G.: Aircraft structures for engineering students.
Edward Arnold (Publishers) Ltd, 1977.[10] Zienkiewiecs O. C.: The
Finite Element in Engineering Science, London-New York,
McGraw-Hill, 1971.
[11] Bisplinghoff R.L., Ashley H., Halfman R.: Aeroelasticity.
Dover Publications, (1996 Ed.).
[12] Oye S.: Tjaereborg wind turbine: Fifth dynamic inflow
measurement, AFM VK-233, Department of Fluid Mechanics,
Technical University of Denmark, 1992.