Embed Size (px)
Citation preview
8/9/2019 Ams96ppr
http://slidepdf.com/reader/full/ams96ppr 1/4
9 AIRPOL FA P1.4 CLIMATRONICS’ NOVEL SONIC ANEMOMETER
John H. Robertson*
David I. Katz
Climatronics Corporation
Bohemia, New York
1. INTRODUCTION
Climatronics Corp. has developed a new sonic
anemometer utilizing a novel approach. This
anemometer fills the need for a rugged, compact, ice
free, non moving part anemometer. The resulting
anemometer is small, only 10 cm in diameter and 16 cm
long and has been designed to replace cup and vane or
propeller anemometers in most applications. Another
feature of the sensor is its’ low power consumption
requiring less than 0.5 watt for operation.
2. DESCRIPTION
Climatronics’ sonic anemometer’s operation is based on
the same classic principles as most sonic anemometers.
The time required for a sound wave to travel from point
A to point B is effected by the speed of the wind in a
predictable and repeatable way. The novel feature of
this anemometer is that the sound is directed down and
reflected from a second surface before being detected at
the receiver. This arrangement has the advantage that
the transducers are out of the weather and out of the
direct path of the wind which resulted in a very rugged
and compact design.
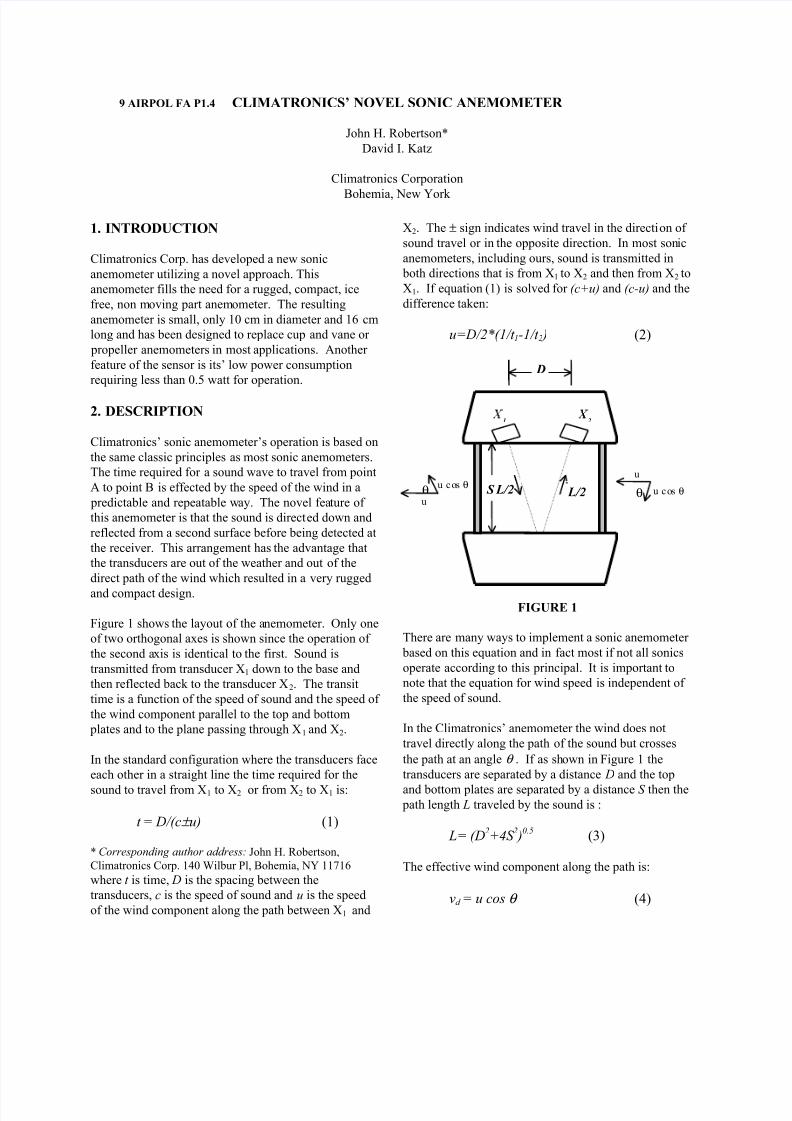
Figure 1 shows the layout of the anemometer. Only one
of two orthogonal axes is shown since the operation of
the second axis is identical to the first. Sound is
transmitted from transducer X1 down to the base and
then reflected back to the transducer X2. The transit
time is a function of the speed of sound and the speed of
the wind component parallel to the top and bottom
plates and to the plane passing through X1 and X2.
In the standard configuration where the transducers face
each other in a straight line the time required for the
sound to travel from X1 to X2 or from X2 to X1 is:
t = D/(c± u) (1)
* Corresponding author address: John H. Robertson,
Climatronics Corp. 140 Wilbur Pl, Bohemia, NY 11716
where t is time, D is the spacing between the
transducers, c is the speed of sound and u is the speed
of the wind component along the path between X1 and
X2. The ± sign indicates wind travel in the direction of
sound travel or in the opposite direction. In most sonic
anemometers, including ours, sound is transmitted in
both directions that is from X1 to X2 and then from X2 to
X1. If equation (1) is solved for (c+u) and (c-u) and the
difference taken:
u=D/2*(1/t 1-1/t 2 ) (2)
FIGURE 1
There are many ways to implement a sonic anemometer
based on this equation and in fact most if not all sonics
operate according to this principal. It is important to
note that the equation for wind speed is independent of
the speed of sound.
In the Climatronics’ anemometer the wind does not
travel directly along the path of the sound but crosses
the path at an angle θ . If as shown in Figure 1 the
transducers are separated by a distance D and the top
and bottom plates are separated by a distance S then the path length L traveled by the sound is :
L= (D2+4S
2 )
0.5(3)
The effective wind component along the path is:
vd = u cos θ (4)
L/2 L/2
D
2
1
u cos θθu cos θ
θ S
u
u

8/9/2019 Ams96ppr
http://slidepdf.com/reader/full/ams96ppr 2/4
If S is made very small θ approaches zero, cos θ
becomes unity and the path length L approaches D. In
other words the sensitivity is reduced by cos θ . A large
S minimizes interference with the wind field. At the
same time a large S reduces sensitivity because cos θ
becomes small. In the final instrument the values of S
and D are determined by such factors as desiredaccuracy, sensitivity, overall size, etc.
It is desirable to keep the spacing D small to achieve a
compact instrument. A compact instrument is rugged,
much easier to transport, install and de-ice. Having D
small leads to some problems. When D is small the
effective transit time is small and the effect of the delays
in the transducers and electronics can cause large errors.
In addition the actual transit time for the sound is long
because the sound must still travel over a distance of L.
It is possible to measure t 1-t 2 directly and this can
reduce some of these errors. A more complete
expression for the transit time, Schotland (1955) is:
t=D[(c2-vn2 )0.5
± vd ] / [c2-(vd 2+vn
2 )] + δ (5)
Where vn is the wind component normal to the
propagation path, c is the speed of sound, vd is the
component along the path and δ is the delay through the
transducers and electronics. If we assume that δ is the
same for both directions of propagation:
vd = (t 1-t 2 )[c2-(vd 2+vn
2 )] / 2D (6)
This expression not only requires that the speed of
sound is known but will require evaluation of (vd 2+vn2 ). The speed of sound can be approximated by:
c = [403T(1+0.32 e / P)]0.5 (7)
where T is the absolute temperature , e is the vapor
pressure and P is the barometric pressure. A reasonable
maximum value for e/P is 0.1 resulting in less then a
3% error in the speed of sound. The term (vd 2+vn
2 ) is
the velocity of the wind squared. At a speed of 50 m/s
the value of (6) is affected by less then 3% and at 20
m/s by less then 0.5%.
Setting (vd 2+vn
2 ) equal to zero and substituting c2 =403T results in:
vd = (t 1-t 2 )(403T) / 2D (8)
The assumption that the delay δ is equal is valid only
after careful matching of transducers and design of
electronics. Any mismatch results in offset and drift in
the instrument’s zero. In the present instrument these
errors are held to approximately ± 0.25 m/s.
One last potential source of error is the four posts used
to separate the upper and lower housings. These have
been made as small as possible and based on wind
tunnel testing have negligible effect on the wind flow.
The resulting anemometer is very simple and rugged.
In its simplest configuration a linear frequency
proportional to the speed along an axis is output for
each axis. In addition temperature is available as an
analog voltage. This information can be used to
calculate wind speed directly and if humidity and
pressure information are available the speed of sound
may be computed more accurately. In addition a
correction for the (vd 2+vn
2 ) term in equation (6) is
possible if additional accuracy is required.
3. TEST PROGRAM
Testing of the anemometer has been divided into three
phases. First is wind tunnel testing over the range of 0-
15 m/s, the range of Climatronics wind tunnel. This
testing determined the accuracy of the sensor along
each axis and its angular accuracy as it is rotated
through 3600. The effect of the support posts, if any,
would also show up in the angle testing. Figure 2 shows
the error along an axis as a function of wind speed and
Figure 3 shows the angular accuracy at 2.8 m/s.
SONIC DIFFERENCE VS. TUNNEL SPEED
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
-20.00 -15.00 -10.00 -5.00 0.00 5.00 10.00 15.00 20.00
TUNNEL SPEED M/S
D I F F E R E N C E M / S
DIFFERENCE M/S
FIGURE 2
8/9/2019 Ams96ppr
http://slidepdf.com/reader/full/ams96ppr 3/4
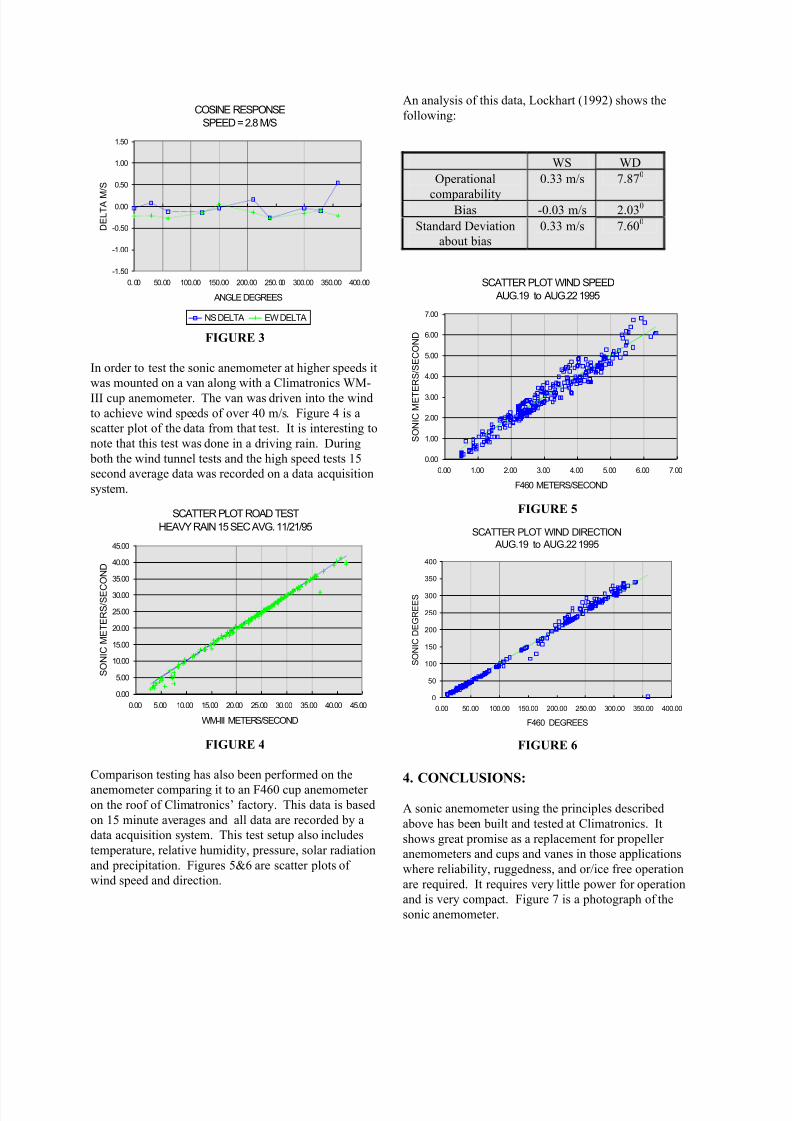
COSINE RESPONSE
SPEED = 2.8 M/S
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
0.00 50.00 100.00 150.00 200.00 250.00 300.00 350.00 400.00
ANGLE DEGREES
D E L T A M
/ S
NS DELTA EW DELTA
FIGURE 3
In order to test the sonic anemometer at higher speeds it
was mounted on a van along with a Climatronics WM-
III cup anemometer. The van was driven into the wind
to achieve wind speeds of over 40 m/s. Figure 4 is a
scatter plot of the data from that test. It is interesting to
note that this test was done in a driving rain. During
both the wind tunnel tests and the high speed tests 15
second average data was recorded on a data acquisition
system.
SCATTER PLOT ROAD TEST
HEAVY RAIN 15 SEC AVG. 11/21/95
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
40.00
45.00
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00 45.00
WM-III METERS/SECOND
S O N I C
M E T E R S / S E C
O N D
FIGURE 4
Comparison testing has also been performed on the
anemometer comparing it to an F460 cup anemometer on the roof of Climatronics’ factory. This data is based
on 15 minute averages and all data are recorded by a
data acquisition system. This test setup also includes
temperature, relative humidity, pressure, solar radiation
and precipitation. Figures 5&6 are scatter plots of
wind speed and direction.
An analysis of this data, Lockhart (1992) shows the
following:
WS WD
Operational
comparability
0.33 m/s 7.870
Bias -0.03 m/s 2.030
Standard Deviation
about bias
0.33 m/s 7.600
SCATTER PLOT WIND SPEED
AUG.19 to AUG.22 1995
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00
F460 METERS/SECOND
S O N I C
M E T E R S / S E C O N D
FIGURE 5
SCATTER PLOT WIND DIRECTION
AUG.19 to AUG.22 1995
0
50
100
150
200
250
300
350
400
0.00 50.00 100.00 150.00 200.00 250.00 300.00 350.00 400.00
F460 DEGREES
S O N I C
D E G R E E S
FIGURE 6
4. CONCLUSIONS:
A sonic anemometer using the principles described
above has been built and tested at Climatronics. It
shows great promise as a replacement for propeller
anemometers and cups and vanes in those applications
where reliability, ruggedness, and or/ice free operation
are required. It requires very little power for operation
and is very compact. Figure 7 is a photograph of the
sonic anemometer.
8/9/2019 Ams96ppr
http://slidepdf.com/reader/full/ams96ppr 4/4
FIGURE 7
4.1 References
Lockhart T. J, 1992: Protocols for intercomparison of
wind instruments. WMO/TD-No. 462, 351-355
Schotland, R. M. , 1955: The measurement of wind
velocity by sonic means. J. Meteor., 12, 386-390





























