Embed Size (px)
Citation preview
![Page 1: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/1.jpg)
Y
AIAA 95-0081 A Time-Accurate Least-Squares Finite Element Method for Incompressible Flow
Lin-Jun Hou
Institute for Computational Mechanics in Propulsion NASA Lewis Research Center Cleveland, OH
33rd Aerospace Sciences Meeting and Exhibit
January 9-1 2, 1995 / Reno, NV For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics 370 L'Enfant Promonade. S.W.. Washington, D.C. 20024
![Page 2: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/2.jpg)
A TIME-ACCURATE LEAST-SQUARES FINITE ELEMENT FOR INCOMPRESSIBLE FLOW
Lin-Jun Hou
Institute for Computational Mechanics in Propulsion NASA Le& Research Center
Cleveland, OH 44135, USA
A time-accurate least-squares finite element method (LSFEM) for solving the tw-dimensional incom- pressible viscous Navier-Stokes equations is presented. The LSFEM, which can accommodate equal order interpolation, leads to symmetric and positive definite system equations which C M be solved e d y by simple iterations. The present paper employs the matrk-free Jacohi preconditioned conjugate gradient (JPCG) method for solving systems of linear algebraic equations. The matrix-free algorithm described here reduces the memory storage and improves the efficiency. An implicit procedure in used for generating coefficient matrices so as to solve the Newton-linearired, discretized algebraic equations more efficiently than the time-marching scheme. Numerical study of different outflow boundary conditions is conducted for this first order system. Numerical results indicate the versatility and effectiveness of the method.
1. Introduction
Time-dependent finite element methods now have been widely used in computational fluid dynam- ics (e.g., I1-41). Most of these numerical methods, which are based on the time-marching scheme, usually lead to large, unsymmetric b e a r systems that are difficult to solve. Recently, substantial interest in least-squares finite element methods has arisen for solving the incompressible Navier- Stokes equations. The least-squarea finite ele- ment method (LSFEM) after discretuntion has, as a valuable merit, a symmetric positive-definite matrix. Due to this advantage, much progress has been made recently using the least-squares fi- nite element method. Jiang and Povinelli [6] a p plied the LSFEM to solve two-dimensional steady incompressible Navier-Stokes equations and com- pressible Euler equations. Further application on incompressible and compressible tlow was done Ly Lefebvre et a1. [6,7]. An optimal LSFEM for 2D and 3D elliptic problems is proposed by Jiang and Povinelli [SI, in which the optimal rate of con- vergence is obtained based on the diu-grad-curl formulation. Through a series of computational experiments, Bochev and Guneburgcr [e] studied the accuracy of this method and suggested tha t it is nearly optimally accurate.
This paper is dccl-d 01 work of the U.S. Government and ir not suhjcctcd to copyright protection,in the United State.
For large-scale computations of three-dimensional steady incompressible Navier-Stokes problems, Jiang et al. [lo] used a 50 x 60 x 50 uniform
lem up to Re = 1000. Recently, a solution for a steady threedimensional backward-facing step flow was presented by Jiang et ai. (111. The flow WM calculated up to Re = 800 and good results were obtained compared with experimen- tal results by Armaly [12]. In Reference [5] , a time-dependent problem WM ats0 solved in the delta form, and Cholesky ZDZT factorization was used for storing lower halt of the m a t h . Later, Tang and Tsang [13] successfully extended the LSFEM by Jiang [14] to develop a time-marching least-squares finite element method to solve nat- ural convection problems, and the =me approach was used for storing the matrix.
In the present paper, a timcaccurate nn- metical scheme for tw~dimensional incompresb ible Navier-Stokea equations solved by the least- squares finite element method is presented. The ma th -Lee Jacohi preconditioned conjugate gra- dient method in employed, and the coefficient ma- trices of the first-order system are generated at current time level. The present method is first tested for an unsteady flow which has analyt- ical solutions (Taylor problem). Solutiona (ue
These numerical examples are for a lid-driven cav- ity, Bow over a square-obstacle and Bow around
mesh to calculate the 3D driven cavity prob- L
also presented for problems having a steady state. v
![Page 3: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/3.jpg)
2
where B denotes the boundary operator, the VD
locity vector uT = (u,w), primitive variables qT = ( u , w , p , w ) , f is a given vector-valued func- tion, and g is a &en vector-valued function on the boundary. For general purposes, we assume that vector g is a null vector, since a problem with nonhomogeneous boundary conditions can always be recast as a problem with homogeneous boundary conditions.
The nonlinear initial boundary value problem for the Navier-Stokes equations can then be writ- ten as
L q = f i n n where L is the first-order partial differential o p erator :
(11)
.-/ ~
a circular cylinder. Outflow boundary conditions for internal and external flows are tested to study their influence on the solutions.
2. N u m e r i c d Formulation
2.1 Velocity-Prcriure- Vorticity Formulation
Before formulating the equations, let's first define some notations for the real b e a r apace. Consider a domain n c 'R", where n represents the num- ber of space dimensions, and let u, w : n - 'R. Let Ly represent the space of square-integrable functions defined on R , and its inner product and norm are defined by
(u, u) = u a d n L
v
W
and /I u l lo = (K U)'/Y (2)
respectively. The Sobolev space of functions of first degree E' ia defined by
"(n) = {U I u E L m ; aU E Ly(n)} (3)
and t h e inner product and associated norm by
and ( 6 )
I/, 11 u Ill = (% .)I
For the solution of the steady incompress- ible Navicr-Stokes equations, Jiang et al. [lo] have developed a hSt-MparCS finite element method which is based on the first-order vrlocity-prrssurc-vorticity formulation. Let's now consider the following nondimensional time- dcprndent incompressible Navier-Stokes problem, which U rccast as the first-order quasi-linear sys- tem, in a bounded domain n C 72'' with a piece- wise smooth boundary r : Find the velocity vector u, the pressun p and the vorficify w such tha!
v . u = 0, ( 6 )
(7) aU v x w --+,,.vu + v p + ___ = f , at Re
w - ~ x u = 0, i n n x ( O , T ) , (8)
a a a ai az aY
L = A o - + A i - + A 2 - + A (12)
and the coefficient matrices in the general form
of the twao-dimensional problem are
0 0 0 0 1 0 0 0 U O l O 0 U O S [ I 0 0 0 0 0 1 0 0 ' ] , A I = [ 0 - 1 0 R I 0
0 1 0 0 0 0 0 0 A Y = [ ; !]*A=[ 0 0 0 0
0 0 0 1 1 0 0
2.2 Discrelization of the Equations
The first-order elliptic system of equations (6- 8) L then linearized in spatial coordinates using Nrwton's scheme, and discretized in time using backward finite differencing. Unlike the time- marching scheme proposed by Tang and Tsang [13], in which the coefficient matrices of differen- tial operator are evaluated at the previous time level, the present algorithm leads to an implicit time-accurate scheme where the coefficient matri- c n in equation (13) are generated a t the current time level. We thus have the linearized equations written as a standard first-order system
L?+') q ( n + l ) f in n (14) where the differential operator
![Page 4: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/4.jpg)
and ( ) @ indicates solutions from previous lin- earization. The C matrix, which is the contribution of New- ton linearization, is
r o 0 0 0 1
and the force vector f = fin+') + fin) where
(16)
2.3 Least-Squares Finile Element Formulalion
The linearized discretized first-order equations are then solved by the LSFEM, which minimizes the L, norm of the residual R for the admissi- ble vector q in equation (14); Le., minimhe the objective functional
where R = L$*+')q(n+l) - f
Minimization of the functional leads to the least-squares weak statement : Find q E S = {(H'(n))'; B(q) = 0 on r}, such that
(Lw, Lq) = (Lw, f ) v w E s (18)
where the test function 6q = w . The spatial discretization of these equations is performed by discretizing the domain into finite elements and then introducing an appropriate finite element be&. Let Ne denote the numbex of nodes for one element and N;(z,y) denote the element shape functions. Using equal-order interpolations for all primitive variables, one can write the expansion as
where (u,u,p,w); are the nodal values a t the i th node. Upon substituting equation (19) into the
3
\J weak form of equation ( le ) , one thcn has thc tin- ear algebraic equations
IC("+'). q(*+l l = p (20)
where the s t X n M matrix and force vector cue
--. (21)
F = 51 (L?+l)N,)T . f d n (22)
It in obvious that the stiffness matrix in equation (21) is symmetric and positive-definite and thus easy to solve numerically. As was done by Jiang et ai. [lO,ll] for steady-state problems, the la- cobi preconditioned conjugate gradient method is employed to solve the line= algebraic equations and the matrix-free algorithm is used to save com- puter storage. Moving the force vector to the left- hand-side in equation (20) and rewriting, we have
.=I n.
Let's define the operation matrix for the element, B. = (L?+')N,).. By taking the product of the operation matrix of the element and the el- ement vector q!""), we wi l l obtain the residual for each element, R.. The global vector can then be obtained without even generating the element matrix by taking the product of the transpose of the operation matrix and the residual. Note that in each CG iteration, only primitive variables and element residuals are updated while coeffi- cient matrices A1 and A , are updated through linearisation.
2.4 Boundary Condifions
Since the system (14) is of first-order, only Dirichlet-type boundary conditions can be speci- fied. Two onttlow boundary conditions were ang- gested by liang et al. [lo] : (1) u = giocn, D = 0 for well developed outEow, (2) u, = 0, p = conatant, where r denotes the tangentid direc- tion of the boundary. In general, unlcss the com- putational domain is long enough. the outtlow boundary condition, u, = 0, may not be very a p propriate. In the numericd examples dLcudsed below, two outflow boundary conditions are used for internd Bow :
W
![Page 5: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/5.jpg)
bc 1 : v = 0 , p = c a d a n i on r bc 2 : Eztrapdate (u, p)
4
Boundary condition bc 2 is 'softer' than bc 1. For external flow problems, outflow bound- ary condition bc 2 is modified by extrapolating the velocity vector, and the pressure is fixed a t a single point. Thia approximation can be treated M a pure convection condition.
2.5 Convergence Criteria
For each time step, qua t ions are linearized u e ing Newton's scheme to update the coefficient ma- trices. The Jacobi preconditioned conjugate gra- dient method is then employed for the iterations of the linearised system of quations. The s t o p ping criteria for linearisation is baaed on minimi.- ing the maximum difference of the velocity magni- tudes between two sequential linearisations. The convergence criteria for CG iteration is based on minimizing the ZI norm error of the qua t ion residuals instead of two sequential iterations.
For the Taylor problem, a lid-driven cavity flow and internal flow over a square obstacle, the tol- erance for CG iteration is set to be lo-" and is lo-" for Newton linearisation. For the problem of flow around a circular cylinder, IO-@ and IO-' are the stopping criteria for CG iteration and lin- earization respectively.
3. Numer ica l Examples
v
In this section. sample results are presented for the following laminar flow problems :
Unrleody Laminar Flow (Taylor problem)
The first teat problem is an unsteady laminar flow governed by the following analytical solu- tions to the continuity and Navier-Stokes q u a - tions (Taylor problem) [15,16] :
u = - co42rr ) sin(2ry) .z-'/R*)('r')t
u = .in(2r*)cor(~ry)e(-'IR')('.')' (24) p = -0.25[cor(4rz) + coa(4ry)l e(-'/R*)('*')'
The computational domain WM dkre t i ied in a unit square, and calculations were made for Reynolds numbers Re = IO, 10' and 10'. The ini- tial and boundary conditions were specified by ue ing equations (24 ) . Since the analytical solutions a ~ e functions of time. space and Reynolds num-
e
4
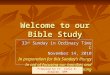
ber, the computations were also performed using different time steps At and mesh space A z for er- ror analysis [le]. The Za norm error of each vari- able aa a function of the time step for Re = 100 is shown in Fig. l(a). The temporal accuracy improves by a half order when the Deltat is re- duced from 0.05 to 0.01, and by one order when it reduces from 1.0 to 0.1. Fig. l(b) illustrates the spatial accuracy for Re = 1000, and the accu- racy is improved by five order when the Dellaz is reduced from 0.05 to 0.01, and is improved by one and half order when it is reduced from 0.1 to 0.05. The ZI norm error remains a constant as Re 2 100 as shown in Fig. l(c).
2D Lid-Driuen Cauiiy
The problem of two dimensional laminar in- compressible flow in a square driven cavity is used M the second test for present method. This prob- lem has been studied extensively and serves as a benchmark test case. Numerous studies of this problem have been done using the finite element method with a mixed method [17], with a semi- implicit method [4], with a LSFEM (steady-state) [IO] and with a timodependent LSFEM [13]. Nu- merical results for the present method are run using a non-uniform mesh of 50 x 50 bilinear ele- ments for Re = 10' and lo6. Two thin layers of elements with thickness of 0.002 and 0.004 units are put on the top layer to take care of the sin- gularity a t the top corners. The boundary cou- ditions u = 1, u = 0 are specified at the top, and u = u = 0 on the solid walls. At the bottom cen- ter, the reference pressure p = 0 is specified. It is not necessary to specify the vorticity boundary condition and rerwvelocity is taken as the initial condition. Fig. 2 shows the time history of the velocity profiles along the central axes of the cav- i ty for Re = 10' and lo', respectively.
For a time step At = 0.2, it takes 40 time steps for Re = 10' and 75 time steps for Re = 10' to achieve the "steady-state" solutions. The agree- ment with experimental results by Ghia et al. [18] is quite good for both Reynolds numbers. It is dso interesting to investigate the pressure soln- tiou since its accuracy is usually lower than that of the velocity. Fig. 3 illustrates the pressure dis- tribution along the stationary wall for Re = IO', where the wall distance is expanded in the z coor- dinate. The results show satisfactory agreement with those obtained by Ghia t-1 al [18] and com-
![Page 6: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/6.jpg)
5
u this condition is not rearonablc for LSFEM, since
# 0, and the enforcement of icro vorticity a( the outlet might lead to inaccurate solutions. Al- though the Navier-Stokes equations can ab0 be written in the first-order velocity-pressure-strelrr form such that shear stress boundary condition can be i m p d directly. the resulting system CM-
not be elliptic in the ordinary sense and it is diffi- cult to specify an appropriate number of bound- ary conditions.
T w o meshca are used in present method for Re = 200 baaed on the channel height : mesh (a) has 240 b h e a r elements with 282 nodes, mesh (b) has 1000 elements with 1086 nodes as shown in Fig. 4. The inlet boundary condition has a %at” velocity field u = 1 and u = 0; the non- slip boundary conditions u = u = 0 are imposed along the wall and along the obstacle.
For fine mesh with time step Af = 0.2, it takes about 82 time steps with boundary condition be 1 to achieve “steady state” solutions, and 88 time
reattachment length is not very sensitive to these two boundary conditions and it cannot be a mea- surement of the convergence of the solutions. The time history of the velocity vectors and stream- lines M shown in Figures 66. The solutions at 1 = 12.0 using boundary condition be I , have not ruuhed the %teady-state” and the eddy length has rurehed 6.78 step heights which is the same as that obtained by Leone and Gresho [Zl]. At t = 16.0, the solutions reach the steady-state and are in excellent correlation with those obtained directly from steady-state solutions. It takes a few more time steps for solutions to converge by using the extrapolation boundary condition. N+ tice that there is an upstream eddy a t the corner of the obstacle for ateady state so~utions which agrees with Leone a d Greaho’s results.
The difference between the two types of bound- ary conditions becomes more obvious by compar- ing the velocity gradients at the outlet. The YC
locity gradients 2 and 2 using bc 2 are of or- der of IO-‘ while they are lo-’ using bc 1. This might because the 40- has not yet fully dcvel- oped with a channel length of 6 units in this case. Thus, the extrapolation of boundary condition provides a more natural and smooth behavior at the outlet. u
steps xdb hc 2 tn converge. !! h aotdthat <he
u
pare well with those by Chen and Pletchcr (191.
Flow Over a Square Obaiacle
Another popular numerical example is the flow over a square obstacle. Hughes e t 01. (201 a p plied the penalty-function finite element formula- tion to study the transient behavior of this proL lem for Re = 200. They employed a modified upwind treatment of the convection term to im- prove the solutions. A different argument wna made by Leone and Gresho [Zl], who used a con- ventional Gderkin technique by refining the mesh instead of taking recourse to an upwind method to eliminate the wiggle problem appearing UP stream of the obstacle. Using the mixed finite element method, Yang and Atluri (171 studied the steady and unsteady c ~ s e s of the problem. Later Ramaswamy [22] used an equal order velocity- pressure finite element method to obtain the tran- sient solutions.
The interest in this test example is not only
the study of the outflow boundary conditions. Most of the investigators [17,20-221 applied the traction-free boundary condition at the outlet. As pointed out by Leone and Gresho [21], the (shear) stress-free boundary condition is not com- patible with PoiseuiUe flow as it moving down- stream. Yet, they indicated that the traction-free outflow boundary condition results in better and smoother solutions. Without using upwinding, Yang and Atluri [I?] applied the mixed finite el- ement method to solve the backward-facing step problem at Re=125, 155 and 191. By testing two outflow boundary conditions : (i) f. = 1, = 0, (ii) f. = v = 0 (f. and 1, here denote the sur- faee tractions), they suggested that results using boundary condition (ii) are rather ‘smooth’ for a channel length of 8 units. Computations for the current problem were also performed in Refer- ence (171 with an upwinding scheme. Good eddy length and intensity were obtained by imposing the traction-free boundary condition. However, two unexplained eddies appeared in their tran- sient solutions. Recently, Tang and Tsang [13] in- terpreted the shear streskfree case as having aero vorticity for the outflow boundary condition so that the primitive variable, w , could be specified on the boundary. Even though this is a Dirichlet type boundary condition, it is quite obvious that
i!! the %ceur%cy ef ?ht dC&iOoS- Sa:* iti
![Page 7: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/7.jpg)
6
or a well diveloped outflow, while boundary con- dition bc 2 , which is an approximation of the natural convection condition, is more appropri- ate for higher Reynolds numbers when the inertia force dominatu the flow. With time step being 0.02, it takes approximately 510 steps to reach the 'steady state' for both types of boundary condi- tions. However, more Linearbations are required to reach convergence with boundary condition bc 2. Agein, care must be taken when the vorticity condition is to be specified at the outlet. Vorticity is transported along streamlines and dissipated by viscosity. If an inappropriate vorticity bound- ary condition is specified, the introduced error wil l grow exponentially upwind from the outflow.
10 depicts the pressure coefficient dis- tribution along the B direction and present re- sults agree well with numerical results by Son and Hanratty (221, Rhie [23], TenPas and Pletcher [24], and Chen and Pletcher 1191. The skin fric- tion coefficient distribution is shown in Fig. 11, and satisfactory results are observed compared with those obtained by Majumdar and Rodi [25], Chen and Pletcher [I91 and experimental results by Acrivos el al. [26]. Similar to other numeri- cal results, the skin friction coefficient is under- predicted from 8 = 15O - 55" and overpredicted from B = 60° - llOo compared with experimen- tal results. The deviation of pressure coefficients using two types of boundary conditions is negli- gible, while the computation of skin friction co- efficient using the pure convection boundary con- dition performs somewhat better.
Fig.
Comparisons of the solutions can be made by measuring some flow quantities. These quanti- ties are defined as pressure drag C,+, the pres- sure coefficients a t the forward and rear stagna- tion points C,, and C,, the separation angle e,,, and the separated vortex length L,.p. Ta- ble 2 tabulates the summary from the literature [19,27], and satisfactory results are observed for present method.
4 Conclusions
A timc-accurate least-squares finite element method to solve the incompressible viscous Navier-Stokes equation is presented. The LSFEM generates a symmetric and positive-definite al- gebraic system of equations which is solved by the matrix-free conjugate gradient method. The
Study of the pressure profiles provides fur- ther insight into the problem. Fig.7 illustrates the pressure distribution on the lower boundary. The discontinuity which happens at the corner of the leading edge due to the large gradient is similar for both types of boundary conditions. Comparison between Leone and Gresho's re- sults (using 230 biquadratic elements, 1003 nodes and traction-free boundary conditions) and the present results by different meshes and boundary conditions is also shown in Fig. 7. The pressure drop (- 2.4) in Leone and Gresho's results [21], is believed to be less severe than they indicated and might be due to the fact that the "source terms" (evaluated from the difference of the mo- mentum equations) in the Poisson equation are not "well behaved" for a coarse mesh. Present results, though, show a more severe pressure drop from - 2.5 for a coarse mesh to - 3.2 for a fine mesh using the two types of boundary conditions. The pressure distribution upstream of the obsta- cle from reference (171 is close to the present re- sults using bc 2, and closer to the results from be f downstream. Numerical comparisons are listed in Table 1. The smoother pressure profiles along the top wall are presented in Fig. 8, and the de- viations between coarse and fine mesh are quite small. Figures 7 and 8 also indicate that the pres- sure difference between using these two types of boundary conditions is close to a constant.
Flow Around a Circular Cylinder
y/
d
The viscous flow around a circular cylinder has been studied more than a decade, owing to its rich source of various fluid dynamic phenomena and it is a good model problem for practical flows past bluff bodies. The present flow solver was tested for Re = 40 (based on diameter) at which a steady state solution exists. It is worth mention- ing that steady state solutions for this problem become experimentally unstable around Re = 40. The finite element mesh model shown in Fig. 9 has 4248 bilinear elements and 4340 nodes. The computational domain is divided into two regions, a radial-type square region with eight diameters surrounding the cylinder, and a nonuniformly d i s tributed region with a grading factor of two ex- tending downstream to twenty diameters.
v As discussed above, boundary condition bc f is more appropriate for a low Reynolds number
![Page 8: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/8.jpg)
coefficient matr ice in the quasi-Linear algebraic equation are generated M functions of solutions a t the present time so as to solve the Newton- Lineariced, discretised algebraic equations more efficiently than in the time-marching scheme.
The method is tested for unsteady and steady cases. The solutions compare well with analyti- cal solutions (for the unsteady Taylor problem), and with other numerical results or experimental results using small and large time steps. The dc- viation of results between coarse and fine meshes is small. The boundary conditions employed in this paper reveal the appropriateness for internal and external flow problems. Further work still needs to be done for unsteady flow simulations at higher Reynolds numbers to make the method a design tool.
Acknowledgments
The author would like to thank Dr. B. N. Jiang and Dr. T. L. Lin for their valuable comments and suggestions.
References
[I] H. L a d and L. QuartapeUe, A Fractional- Step Taylor-GalerLin Method for Unsteady In- compressible Flows, Inter. J. Numer. Methods Fluids 11 (1990) 501-513.
[2] R. Glowinski and 0. Pironnean, Finite El- ement Methods for Navier-Stokes Equations, Annu. Rev. Fluid Mech. 24 (1992) 167-204.
[3] J. T. Oden, Theory and Implementation of Bigh-order Adaptive hpmethods for the Analy- sis of Incompressible Viscous Flows, to appem in Comput. Methods Appl. Mech. Engrg..
[4] B. Ramaswamy, T. C. Jue and J. E. Atin, Semi-impticit and Explicit Finite Element Meth- ods for Coupled Fluid/Thermal Problems, Int. 1. Numer. Meth. Engrg. 34 (1992) 675-696.
[SI B. N. Jiang and L. A. Povineu, Least- Squares Finite Element Method for Fluid Dynam- ics, Comput. Meth. Appl. Mech. Engrg. 81 (1990) 13-37.
[6] D. Lefebvre, J . Peraire and T. D. Taylor, Fi- nite Element Least Squares Solution of the Euler Equations Using Linear and Quadratic Approd-
7
\J mations, Int. J. Comput. Fluid Dyn. 1 (1993) 1-23.
[7] D. Lefebvre, J. Peraire and T. D. Taylor, Least Squares Finite Element Solution of Compressible and Incompressible Flows, to be published in Int. J. Num. Methods Heat Trans. Fluid Flow.
[SI B. N. Jiang and L. A. PovineE, Optimal Least- Squares Finite Element Method for Elliptic P r o b lems, Comp. Methods Appl. Mech. Engrg. 102 (1993) 199-212.
191 P. B. Bochev and Max D. Gunaburger, Ac- curacy of Lesst-squares Methods for the Navier- Stokes Equations, to appear in Comput. Fluids.
[lo] B. N. Jiang, T. L. Lin and L. A. Povinclli, Large-scale Computation of Incompressible Vis- cous Flow by Least-Square Finite Element Method, to appear in Comp. Methods Appl. Mech. Engrg., and NASA TU 105904, ICOMP- 93-06.
[Ill B. N. Jiang, Lin-Jun Eou and T. L. Lm, Least-Squares Finite Element Solutions for ThreoDimensional Backward-Facing Step Flow, NASA TM 106353, ICOMP-93-31, to appear in Int. 1. Comput. Fluid Dyn.
[12] B. F. Armaly, F. Durst, J. C. F. Pereba and B. Schonung. Experimental and Theoreti- cal Investigation of Backward-Facing Step Flow, J. Fluid Mech. 127 (1982) 473-496.
[13] Li Q. Tang and Tate T. E. Tsang, A Least-Squares Finite Element Method for Time- Dependent Incompressible Flows with Thermal Convection, Int. J. Numer. Methods Fluids, 17 (1993) 271-289.
[I41 B. N. Jiang, A Least-Square Finite Element Method for Incompressible Navier-Stokes P r o b lems, Inter. J . Numer. Meth. Fluids, 14 (1992) 843-859.
[15] M. Brass, P. Ch&g and A. H. Minh, Nu- merical Study and Physical Analysis of the Pres- sure and Velocity Fields in the Near Wake of a Circular Cylinder, J . Fluid Mecch. 165 (1986) 79- 130.
[16] San-Yih Lin and Tsuen-Muh Wu, A n A d a p
pressible Navier-Stokes Equations, Int. J . Numer.
u
tive Multigrid Finite-Volume Scheme for Incom- L
![Page 9: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/9.jpg)
8
. . .,I. [ZZ] B. Ramaswamy, Finite Element Solution for Advection and Natural Convection Flows, Com- put. Fluids, 16 No. 4 (1988) 349-388.
1231 J . S. Son and T. J. Hanratty, Numerical So- lution for the Flow Around a Circular Cylinder at reynolds Number of 40, 200 and 500, J. Fluid Mech. 35 (1969) 369-386.
[24] P. W. TenPas and R. H. Pletcher, Solution of the Navier-Stokes Equations for Subsonic Flows Using a Coupled Space-Marching Method, AIAA- 87-1173-cp.
[25] S. Majumdar and W. Rodi, Numerical Cal- culations of Turbulent Flow Past Circular Cylin- ders, Third Symposium on Numerical and Phys- ical Aspects of Aerodynamics Flows, 3-13 - 3-25, Long Beach, California state University, 1985.
[ Z S ] A. Acrivos, L. G. Leal, D. D. Snowden and F. Pan, Further Experiments on Steady Separated Flow Past Bluff Objects, J. Fluid Mech. 34 (1968) 25-48.
[27] D. Kwark and Sukumar R. Chakravarthy, A ThrecDimensional Incompressible Navier-Stokes Flow Solver Using Primitive Variables, AIAA J. 24 No. 3 (1985) 390-396.
LSFEM mesh(a) bc I LSFEM mesh(b) bc I LSFEM mesh(a) bc 2 LSFEM mesh(b) bc 2
Methods Fluids, 17 (1993) 687-710.
1171 Chien-Tung Yang and Satya N . Atluri, A n "Assumed Deviatoric Stress-Pressure-Velocity" Mixed Finite Element Method for Unsteady, Con- vective, Incompressible Viscous Flow : Part I1 : Computational Studies, Int. J . Numer. Methods Fluids, 4 (1984) 43-69.
[IS] U. Ghia, K . N. Ghia and C. T. Shin, High-Re Solutions for Incompressible Flow U s ing the Navier-Stokes Equations and a Multigrid Method, J. Comp. Phy. 48 (1982) 387-411.
[19] K . H. Chen and R. H. Pletcher, A Primi- tive Variable, Strongly Implicit Calculation Pro- cedure for Viscous Flows a t All Speeds, AIAA- 90-1521.
[20] Thomas J. R. Hughes, Wing Kam Liu and Alec Brooks, Finite Element Analysis of Incom- pressible Viscous Flows by the Penalty Function Formulation, J. Comp. Phy. 30 (1979) 1-60.
[21] John M. Leone, Jr. and Philip M. Gresho, Finite Element Simulations of Steady, Two- Dimensional, Viscous Incompressible Flow Over a Step, J. Comp. Phy. 41 (1981) 167-191.
-J
- ,'
240 (bilinear) 282 1.51 1.309 1.645 -1.245 1000 (bilinear) 1086 1.51 1.359 1.618 -1.879 240 (bilinear) 282 1.51 0.985 1.645 -1.575 1000 (bilinear) 1086 1.51 1.005 1.618 -2.239
Table 1. Comparisons of Pressure Drop at Leading Edge
u
I elements 1 nodes I 2-dist p I 2-dist P Leone and Gresho I 230 (biquadratic) 1 1003 I 1.50 0.88 I 1.62 -1.5
. CPf c, Q.cp, deg L,cp
Present result ( b c I) 1.04 1.22 -0.51 51 1.92 Present result ( b c 2) 1.03 1.20 -0.52 51 1.92
Literature d a t a summary 0.93 - 1.05 1.14 - 1.23 -0.47 - (-0.55) 50 - 54 1.8 - 2.5
![Page 10: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/10.jpg)
9 i o '
(a) KC=IKI
i o '
E 2 '
i o '
10 ' i o ' i o ' i o '
At
I n 02 nw 0.06 n nu n t o
Az
I .o
0.5
v 0.0
-0.5
. ." .I 0 -0,s 0.0 0.5 I 0
U
, ." - 1 .o -0 .5 0.0 0.5 I .o
I I Fg. 2. Comparison of vela-ily pmfilcs thmugh the ccnlcr of gravity
JNI I'rcscnl (:hen & I'lrtchcr ( ihia cI SI.
. . . . . . .
![Page 11: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/11.jpg)
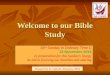
Fig. 5. Velocity vectors for Re = 200 using bc 1.
(a) t = 1 1.0
--.-- - - - - - o s
0 0 0
(b) t = 17
0 0 20 30 4 0 5 0 6 0
Fig. 6. Velocity vectors for Re = 200 using bc 2.
10
![Page 12: [American Institute of Aeronautics and Astronautics 33rd Aerospace Sciences Meeting and Exhibit - Reno,NV,U.S.A. (09 January 1995 - 12 January 1995)] 33rd Aerospace Sciences Meeting](https://reader042.pdfslide.us/reader042/viewer/2022020615/5750951f1a28abbf6bbf0eb4/html5/page/12.jpg)
11
Fig. 9. Finite elcment mesh for flow around a circular cylindcr.
n I 2 3 4 5 6 7
Dirioncc along hx,ttorn suriace
Fig. 7 . I'ressurc distribution 011 Iowcr boundary