Embed Size (px)
Citation preview

Air-management and fueling strategy for diesel engines frommulti-layer control perspective
Downloaded from: https://research.chalmers.se, 2020-06-15 20:45 UTC
Citation for the original published paper (version of record):Ilka, A., Murgovski, N., Fredriksson, J. et al (2019)Air-management and fueling strategy for diesel engines from multi-layer control perspectiveIFAC-PapersOnLine, 52(5): 335-340http://dx.doi.org/10.1016/j.ifacol.2019.09.054
N.B. When citing this work, cite the original published paper.
research.chalmers.se offers the possibility of retrieving research publications produced at Chalmers University of Technology.It covers all kind of research output: articles, dissertations, conference papers, reports etc. since 2004.research.chalmers.se is administrated and maintained by Chalmers Library
(article starts on next page)

Air-management and fueling strategyfor diesel engines from multi-layer
control perspective
Adrian Ilka, Nikolce Murgovski, Jonas Fredriksson andJonas Sjoberg
Department of Electrical Engineering,Chalmers University of Technology, Horsalsvagen 9-11, SE-412 96,
Gothenburg, Sweden. E-mail: [email protected]
Abstract: The paper proposes a novel control design procedure for air management andfueling strategy (AMFS) of diesel engines in lights of a multi-layer control structure (MLCS).Furthermore, novel sufficient stability conditions in the form of linear matrix inequalities arederived (using slack variables to reduce the conservativeness) for grid-based linear parameter-varying systems. The gain-scheduled controller for AMFS is designed to track a reference torquetrajectory requested by higher control layers from MLCS, with the objective of minimizingdiesel consumption and pollutants’ emissions. For controller design a reduced order grid-basedlinear parameter-varying model is obtained from the detailed benchmark model published byEriksson et al. (2016). The controller is validated on the benchmark model using the road profileSoderalje-Norrkoping.
Keywords: Multi-layer control; optimal control; robust control; linear parameter-varyingsystems; diesel engine; air-path system.
1. INTRODUCTION AND PRELIMINARIES
Transport is one of the key components in economicgrowth and globalization, and also the largest drainer ofenergy, especially oil. In a typical economy, up to 25% ofall energy consumption accounts for transportation pur-poses. The main source of energy is obtained from oil, sotransport can also be accounted as the largest drainer ofthe limited oil reserves. In fact, about 60% of all the globaloil consumption is attributed to transport activities (Ro-drigue et al., 2017). In addition, transport is a significantcontributor to global warming (through emission of carbondioxide CO2) and to air pollution (including nitrous oxidesNOx and particulates) (Fuglestvedt et al., 2008). In theEU, transport industry contributed to about 21% of thetotal CO2 emissions in 2017, 72.9% of which is from roadtransport (EEA, 2017).
Therefore, reducing energy consumption and minimizingemissions of vehicles is of utmost importance nowadays.One approach is to improve the vehicle design, by e.g.reducing the aerodynamic drag and rolling resistance, orby developing novel powertrain concepts, such as those inhybrid-electric, fuel-cell-electric or fully electric vehicles.Another approach is to improve the software solutions,by e.g. intelligently controlling the available actuators inthe various powertrain concepts, see e.g. NASEM (2015)and references therein. One effective way to address thisproblem from an optimal control perspective is to use theso-called multi-layer control structure.
? This work has been financed in part by the Swedish Energy Agency(P43322-1), and by IMPERIUM (H2020 GV-06-2015).
1.1 Multi-layer control structure (MLCS)
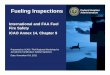
The optimal control problem for improving powertrainefficiency has the objective of minimizing fossil fuel con-sumption and pollutants’ emissions, while taking the ad-vantage of the novel technologies that provide predictiveand dynamic information on traffic and road topographyand enable communication between vehicles and infras-tructure. Due to the emerging control complexity, thetypical approach for obtaining a computationally tractablesolution is splitting the original optimal control probleminto finite number of subproblems, organized into severalcontrol layers, see Fig. 1.
The first control layer from the top is the Transportmission management (MM), which is a layer that runsa model predictive control (MPC) algorithm in the cloud,or possibly in the vehicle, in order to generate referencetargets for the layer below. The aim of the MM is tominimize fuel consumption, wear and discomfort for theentire mission, or up to hundreds of kilometers, subjectto electric charge sustaining and traffic information, andbounds on speed, battery energy and travel time. Formore info see Hamednia et al. (2018). The next twolayers are the Energy buffers management (EM), and theGear and powertrain mode management (PM). These on-board layers are minimizing fuel consumption, wear anddiscomfort for a look-ahead horizon of up to 10 km. TheEM optimizes vehicle velocity and battery state of chargeusing sequential convex programming while the PM layeroptimizes gear and engine on/off state trajectories usingdynamic programming. For more info the readers arerefereed to Johannesson et al. (2015); Murgovski et al.
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019

Engine and EATS management (EE)Horizon: 5-20 min, update: 5-30 s.
Plans engine air path and emissions set points.
Air managementand fueling strategy
Other local controllers(SCR, DOC/DPF, battery and el. engine control,…)
Combustion engine
Transport mission management (MM)
Horizon: end of route (>100 km), sampling: 250-500 m, update:
60-300 s. Plans target set for EM.
Mea
sure
men
ts /
Est
imat
ions
DOC, DPF, SCR, battery, el. engine,…
On-b
oard
lay
ers
Cloud
Gear and powertrain mode management (PM)Horizon: 1-5 km, sampling: 50-150 m, update: 1-10 s.
Plans gear and powertrain mode.
Energy buffers management (EM)Horizon: 5-10 km, sampling: 50-250 m, update: 5-30 s.
Plans speed, battery energy and travel time.
Local
contr
ollers
la
yer
Upper
superv
isory
la
yers
Top layer
Physi
cal
layer
Look-ahead informationTraffic data, (eHorizon)
Fig. 1. Multi-layer control structure.
(2016); Hovgard et al. (2018). The next on-board layer isthe Engine and Exhaust After-Treatment System (EATS)management (EE), which uses an economic nonlinearMPC based strategy. The objectives of this layer areto improve the fuel economy while fulfilling real-drivingemissions within work-based-windows (introduced in theEuro VI emission legislation for heavy-duty vehicles). Formore info see Feru et al. (2016); Karim et al. (2018).The above three layers (EM, PM and EE) are generatingreference trajectories and set points for the controllers inthe local controllers layer.
1.2 Air management and fueling strategy (AMFS)
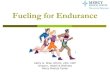
One of the important sub-problems within the local con-trollers layer is the air management and fueling strategy ofthe combustion engine. In this paper we consider a dieselengine with variable geometry turbine (VGT) and exhaustgas recirculation (EGR), as illustrated in Fig. 2.
Fig. 2. Air path system of diesel engine. The engineincludes an exhaust gas recirculation (EGR) and avariable geometry turbine (VGT).
Many approaches exist in literature for controlling suchengines, whilst among the most prominent are the gain-scheduled and/or the linear parameter-varying (LPV) con-trol techniques (Wei and del Re, 2007; Wei et al., 2008;
Liu et al., 2008; Alfieri et al., 2009; Hong et al., 2015;Buenaventura et al., 2015; Hong et al., 2017; Park et al.,2017). So far in general, the local controllers for VGTand EGR are designed to follow prescribed set-points forintake manifold pressure, air mass flow and/or air fraction.However, considering the interface within the multi-layercontrol structure described above, we can conclude that anew low-level controller is needed, where the upper layersare relived of the fast dynamics (intake/exhaust manifoldpressures, turbine speed etc.).
The rest of the paper is organized into four sections. Theintroduction and preliminaries is followed by prescribingthe new control structure and algorithm in Section 2. TheLPV modeling and controller design is described in Section3, proceeded with simulation experiments in Section 4.Finally, Section 5 closes the paper with some concludingremarks. The mathematical notation of the paper is asfollows. Given a symmetric matrix P = PT ∈ Rn×n, theinequality P 0 (P 0) denotes the positive definiteness(semi definiteness) of the matrix. Matrices, if not explicitlystated, are assumed to have compatible dimensions.
2. CONTROL STRUCTURE FOR AMFS
Considering the multi-layer control structure (Section 1.1),the following objectives could be selected for the localcontroller for AMFS:
1) Follow the reference torque, while2) minimizing the fuel consumption, and3) fulfilling the constraints (on inputs, states and out-
puts).
The EGR control is not considered as part of the AMFS,since for the studied system EGR is controlled by theEATS controller, which carries the main responsibility oflimiting NOx emissions. The air path system of dieselengine with VGT can be represented in a polytopic LPVform,
x(t) = A(θ(t))x(t) +B(θ(t))u(t),
z(t) = Cz(θ(t))x(t) +Dz(θ(t))u(t),
y(t) = Cx(t),
(1)
where x(t) ∈ Rnx = [pim(t), pem(t), ωt(t)]T is the state
vector, where pim(t) (Pa) and pem(t) (Pa) are the inputand exhaust manifold pressures, and ωt(t) (rpm) is theturbine speed; u(t) ∈ Rnu = [uδ(t), uvgt(t)]
T is the controlinput vector, where uδ(t) (mg/stroke) is the fuel injection,and uvgt(t) (%) is the VGT position; y(t) ∈ Rny =Me(t) is the measurable output, where Me(t) (Nm) is theengine torque; and z(t) ∈ Rnz = [Wf (t), 1/λ(t)]T is theperformance output vector, where λ(t) (-) is the air-to-fuelratio, and Wf (t) (kg/s) is the fuel flow into the cylinders,
Wf (t) = ncyluδ(t)ne(t), (2)
where ncyl is a known constant and ne(t) (rpm) isthe engine speed. The matrix functions A(θ(t)), B(θ(t)),Cz(θ(t)), and Dz(θ(t)) belong to a convex set, a polytopewith nwp vertices that can be formally defined as
A(θ(t)), B(θ(t)), Cz(θ(t)), Dz(θ(t)) =nwp∑i=1
Ai, Bi, Czi , Dzi θi(t),nwp∑i=1
θi(t) = 1, θi(t) ≥ 0,(3)
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019

θ
ξ
θ
Fig. 3. Closed-loop system with the gain-scheduled PIDcontroller.
where Ai, Bi, Czi , Dzi , and C are constant matrices ofcorresponding dimensions, and θi(t) ∈ Ω, i = 1, 2, . . . , nwpare constant or time-varying known parameters calculatedfrom the scheduling parameters (engine torque Me(t),engine speed ne(t), and VGT position uvgt(t)).
We propose a gain-scheduled PIDf controller in the form
u(t) =KP (θ(t))e(t) +KI(θ(t))
∫ t
0
e(τ)dτ
+KD(θ(t))edf (t),
(4)
where e(t) = y(t)−w(t), wherein w(t) is the reference sig-nal (in our case the reference torque Meref ). Furthermore,KP (θ(t)), KI(θ(t)), and KD(θ(t)) are the proportional,integral, and derivative gains belonging to a convex setsimilar to (3), and eDf
(t) is derivative error filtered by
Gf (s) =cfs
s+ cf, (5)
where cf is a filtering coefficient. The closed-loop systemstructure can be sketched as shown in Fig. 3, where d(t)is the disturbance input (in our case the engine speedne(t)), and ξ(t) is a signal form the supervisor, whichcan be used to adjust the performance of the controller.Investigation of the benefits from such adjustments hasbeen excluded from the scope of this paper and ξ(t) is notfurther discussed.
The control law (4) should be designed according tothe objectives stated above. One way to do that is toformulate the controller design as an output-feedbacklinear quadratic regulator (ofLQR) design problem, wherethe quadratic cost function can be defined as
J∞ =
∫ ∞0
(x(t)TQ(θ(t))x(t) + u(t)TR(θ(t))u(t)
+2x(t)TS(θ(t))u(t))dt,
(6)
where [Q(θ(t)), S(θ(t))S(θ(t))T , R(θ(t))
] 0,
Q(θ(t)) = Qx(θ(t)) + Cz(θ(t))TQzCz(θ(t)),
R(θ(t)) = Qu(θ(t)) +Dz(θ(t))TQzDz(θ(t)),
S(θ(t)) = Qxu(θ(t)) + Cz(θ(t))TQzDz(θ(t)).
The weighting matrices Qx(θ(t)) ∈ Rnx×nx , Qu(θ(t)) ∈Rnu×nu , Qxu(θ(t)) ∈ Rnx×nu , and Qz ∈ Rnz×nz can beused to tune the closed-loop system in order to balancethe trade-off between the reference tracking, fuel consump-tion and emissions (particulates), as well as to fulfill theinput/output/state constraints.
22
98
41
60
79
VGT position
(%)
500
1000
1500Engine speed
(rpm)
0
200
400
600
800
1000
1200
1400
1600
1800
Torq
ue
(Nm
)
200
1600
1800 1600
1800 1600
1800 1600
1800
Fig. 4. Grid points used for linearization along the workingtrajectory generated by the three scheduled parame-ters (engine torque and speed, and VGT position).
3. LPV MODELING AND CONTROL
This section presents the proposed LPV modeling andcontrol algorithms. First, the LPV modeling and modelvalidation are described, which are followed by the LPVcontroller design.
3.1 LPV modeling
There are several techniques to obtain linear-parametervarying models. For a comprehensive survey, readers arereferred to Toth (2010) and references therein. One of theapproaches is the grid-based LPV identification and mod-eling technique, which is also supported by the ControlSystem Toolbox, Matlab (The Mathworks, Inc., 2017).The LPV model in the form of (1) has been obtainedby reducing the nine-state benchmark model, publishedby Eriksson et al. (2016), to the three slowest states, asdescribed in Section 2. The reduced model is then lin-earized about 330 working (grid) points (Fig. 4) along thetrajectory generated by the three scheduling parameters(engine torque Me(t) ∈ [0, 1800] Nm, engine speed ne(t) ∈[400, 2000] rpm and VGT position uvgt(t) ∈ [20, 100] %).
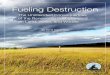
Comparison of the original nine-state benchmark model(Eriksson et al., 2016) with the obtained three-state grid-based LPV model is shown in Fig. 5. Beside the com-parison of system states, measured and performance out-puts, the absolute percentage errors (APE), mean absolutepercentage errors (MAPE) and max absolute percentageerrors (maxAPE) are displayed as well. These percentageerrors are calculated as:
APEi =|Soi − Sti |max |Soi |
100%, i = 1, 2, . . . , n,
MAPE =1
n
n∑i=1
(APEi), maxAPE = max(APEi),
(7)
where n is the number of samples, and Soi and Sti are thei-th original and test samples.
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019

500
1000
1500
Me (
Nm
) Benchmark model LPV model
MAPE=0.13%max(APE)=0.67%
0
0.5
APE
(%
)
1.5
2
2.5
p im (
Pa)
105
Benchmark model LPV model
MAPE=0.85%max(APE)=6.43%
0
5
APE
(%
)
4
6
8
n t (rp
m)
104
Benchmark model LPV model
MAPE=0.49% max(APE)=3.75%
37 42 47 52
Time (min)
0
2
APE
(%
)
0.2
0.4
0.6
1/
Benchmark model LPV model
MAPE=0.40% max(APE)=1.89%
0
1
APE
(%
)
1.52
2.53
3.5
p em (
Pa)
105
Benchmark model LPV model
MAPE=1.38%max(APE)=7.56%
0
5
APE
(%
)
0
100
200
u (
mg/
st.)
37 42 47 52
Time (min)
50
100
u VG
T(%
)
Fig. 5. Comparison of the original benchmark model (Eriksson et al., 2016) with the reduced order grid-based LPVmodel (16 min slice from the 91 min driving cycle).
3.2 LPV controller design
Most of the LQR-based LPV and/or gain-scheduledoutput-feedback controller design approaches formulatesthe controller design problem as an optimization problemsubject to constraints in the form of linear/bilinear matrixinequalities (LMIs/BMIs) (Vesely and Ilka, 2013; Ilka andVesely, 2014; Vesely and Ilka, 2017; Ilka and Vesely, 2017).These optimization problems can be solved efficiently byusing LMI and/or BMI solvers for small and mediumsized problems. However, big LMI and/or BMI problemswith high number of variables (controller gain matrices,Lyapunov matrices, auxiliary matrices etc.) could lead tothe problem being unsolvable.
In this paper, we propose a systematic procedure to dealwith the high number of variables owing to the 330 gridpoints, by splitting the whole optimization problem intosmall sub-optimization problems. Then the results of thesesub-optimization problems are united to get the sub-optimal gain-scheduled output-feedback controller. Theoverall stability is then tested with a novel stability criteriadeveloped for this procedure.
First, the system (1) is augmented with the sensor dynam-ics, which we considered as a first order filter with timeconstant Tf = 0.01 s (the new output is then the sensoroutput ys(t)). Then the uncertainty polytopes (with eightvertices) are obtained for each vertex of the system (1), bylinear interpolation in the space trajectory created by thescheduled parameters (Fig. 6) with 1/3 distance from theneighbouring working (grid) points. Finally local robustLQR-based PIDf controllers are designed for these un-certainty polytopes using the oflqr toolbox (Ilka, 2018),with filter coefficient cf = 100, and weighting matricesQx = diag([0, 0, 0, 102, 105, 103]), Qu = diag([3× 10−3, 1]),Qxu = 0 and Qz = diag([1, 5 × 105]). The gain-scheduledcontroller in the form (4) is then constructed from the
100863
313
Me (
Nm
)525
ne (rpm)
68160
uvgt
(%)41500 22
Fig. 6. Uncertainty polytope around the working (grid)point (Me = 312.5 Nm, ne = 681 rpm, uvgt = 41 %).
family of these local PIDf controllers. The weighting coef-ficients in Qx, related to the PIDf controller (proportionalQx4,4 , integral Qx5,5 and derivative Qx6,6) are selected toobtain certain reference tracking performance (0 steadystate error, no overshoot, and settling-time less then 0.5 s).The weighting coefficients in Qz are chosen to balance thetrade of between fuel consumption and emissions (partic-ulates, by minimizing 1/λ).
Since the reference signal w(t) (reference engine torque)is bounded, we can simplify the derivation by settingw(t) = 0. Then, by augmenting the system (1) with addi-tional state variables such as the integral of the measurable
output ysI (t) =∫ t0ys(τ)dτ , and the filtered derivative
output ysDfusing the derivative filter (5), the control law
(4) can be transformed to
u(t) = F (θ)y(t) = F (θ(t))C(θ(t))x(t), (8)
where y(t)T= [ys(t)T , ysI (t)T , ysDf
(t)T ] is the augmented
output vector and x(t)T= [x(t)T , ysI (t)T , ysDf(t)T ] is the
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019

augmented state vector. The augmented system is then
˙x(t) = A(θ(t))x(t) + B(θ(t))u(t),
y(t) = Cx(t),(9)
where
A(θ(t)) =
[A(θ(t)), 0, 0C, 0, 0BfC, 0, Af
], B(θ(t)) =
[B(θ(t))
00
],
C =
[C, 0, 00, I, 0
BfC, 0, Af
], Bf = cfI, Af = −cfI.
The next Theorem formulates the sufficient stability con-ditions for the closed-loop system formed by system (9)and control law (8)
Acl(θ(t)) = A(θ(t)) + B(θ(t))F (θ(t))C. (10)
Theorem 1. The closed-loop system (10) is quadraticallystable for all θ ∈ Ω if there exist a positive definitematrix P ∈ Rnx×nx and matrices Nj , j = 1, 2, . . . , 6 ofcorresponding dimensions, such that the following LMIshold
Mi =
Mi11 , Mi12 , Mi13
MTi12, Mi22 , Mi23
MTi13, MT
i23, Mi33
≺ 0, i = 1, 2, . . . , nwp, (11)
where
Mi11 =NT1 +N1, Mi12 = P −NT
1 Ai +N2 −NT4 FiC,
Mi13 =N3 +NT4 −NT
1 Bi,
Mi22 =−NT2 Ai − ATi N2 −NT
5 FiC − CTFTi N5,
Mi23 =NT5 −NT
2 Bi − ATi N3 − CTFTi N6,
Mi33 =NT6 +N6 −NT
3 Bi − BTi N3.
Proof 1. Consider the Lyapunov function candidate as
V (t) = x(t)TPx(t). (12)
The first derivative of the Lyapunov function (12) is then
V (t) = ˙x(t)TPx(t) + x(t)TP ˙x(t)
= v(t)T
[0, P, 0P, 0, 00, 0, 0
]v(t),
(13)
where v(t)T = [ ˙x(t)T , x(t)T , u(t)T ]. To separate the Lya-punov matrix P from the system’s matrices the auxiliarymatrices Nj , j = 1, 2, . . . , 6 of corresponding dimensionsare used in the following form
2(N1˙x(t)+N2x(t) +N3u(t))T
( ˙x(t)− A(θ(t))x(t)− B(θ(t))u(t)) = 0,(14)
2(N4˙x(t) +N5x(t) +N6u(t))T
(u(t)− F (θ(t))Cx(t)) = 0,(15)
Summarizing equations (14) and (15) with the time deriva-tive of the Lyapunov function (13) we can write
v(t)TM(θ(t))v(t) ≤ −εv(t)T v(t), ε ≥ 0, (16)
where
M11 =NT1 +N1,
M12 = P −NT1 A(θ(t)) +N2 −NT
4 F (θ(t))C,
M13 =N3 +NT4 −NT
1 B(θ(t)),
M22 =−NT2 A(θ(t))− A(θ(t))TN2 −NT
5 F (θ(t))C
−CTF (θ(t))TN5,
M23 =NT5 −NT
2 B(θ(t))− A(θ(t))TN3 − CTF (θ(t))TN6,
M33 =NT6 +N6 −NT
3 B(θ(t))− B(θ(t))TN3,
Table 1. Reference tracking properties of theclosed-loop system.
Attribute Value
Maximal settling-time: 0.3 sOvershoot: -Steady-state error: -Reference tracking MAPE: 7.2894 × 10−4 %Reference tracking max(APE): 0.0589 %
which implies that the closed-loop system is stable forsome ε ≥ 0 if P 0.
From inequality (16) for ε→ 0 we can obtain
M(θ(t)) ≺ 0, (17)
where M(θ(t)) is convex in θ, therefore it is enough tocheck the definiteness at the vertices of θ, i.e. we get theLMIs (11) which completes the proof.
4. SIMULATION EXPERIMENT
To evaluate the obtained gain-scheduled controller theroad profile Soderalje-Norrkoping and the benchmarkmodel from Eriksson et al. (2016) have been used. Forthe simulation, the reference torque Meref (t), engine speedne(t) and gears are given by the supervisory layers. Simu-lation results are given in Fig. 7, where beside the enginetorque and speed (Me(t) and ne(t)), inverse air-to-fuel ra-tio (1/λ(t)), turbine speed (nt(t)), VGT position (uvgt(t)),fuel injection (uδ(t)), gear, road slope and altitude areshown as well.
Fig. 8 and Table 1 show that the objectives for referencetracking are fulfilled. The total fuel mass for the wholedriving cycle is Mf = 32.78 kg with the proposed con-troller, which is less (up to 3.53 %) compared to total fuelmasses obtained with fixed VGT positions fulfilling theconstraint on the air-to-fuel ratio. This is illustrated inFig. 9 as well, with relation to different constraints.
5. CONCLUSION
This paper proposes a novel suboptimal controller andcontrol design algorithm for AMFS of diesel engines,which is designed to track a reference torque trajectoryrequested by higher control layers. For controller design,a reduced order grid-based LPV model is obtained fromthe detailed benchmark model published by Eriksson et al.(2016). Finally, a simple sub-optimal gain-scheduled PIDf
controller is designed using the oflqr toolbox (Ilka,2018) and by a novel stability criteria developed for thisprocedure. Future research will focus on the extension ofthe established results for NOx emissions control of dieselengines with the EGR system, as well as to investigate thepossible benefits from using the signal ξ(t) (coming fromsupervisors) introduced in Section 2.
REFERENCES
Alfieri, E., Amstutz, A., Guzzella, L., 2009. Gain-scheduled model-based feedback control of the air/fuelratio in diesel engines. Control Engineering Practice17 (12), 1417–1425.
Buenaventura, F. C., Witrant, E., Talon, V., Dugard, L.,2015. Air fraction and EGR proportion control for dual
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019

50010001500
Me (
Nm
)
1000
1500
n e (rp
m)
0.20.40.6
1/
6000080000
100000
n t (rp
m)
50
100
u vgt (
%)
0
100
200
u (
kg/s
tr.)
050
100
Alti
tude
(m
)
-0.040
0.04
Slop
e (r
ad)
55 60 65 70 75 80 85
Time (min)
1214
Gea
r
Fig. 7. Simulation results with the proposed controller (32 min slice from the 91 min driving cycle). The road profileSoderalje-Norrkoping has been used to evaluate the proposed gain-scheduled controller. The red dashed lines arethe constraints to be fulfilled.
545 545.5 546Time (s)
100
100.5
101
101.5
Me (
Nm
)
Me
ref
Me
3779.6 3779.8 3780Time (s)
1329.02
1329.04
1329.06
1329.08
Me
ref
Me
Fig. 8. Zoomed slices from the driving cycle which showsthe reference tracking properties of the closed-loopsystem.
loop EGR diesel engines. Ingenieria y Universidad, Pon-tifica Universidad Javeriana, Faculty of Science 19 (1),115–133.
EEA, 2017. European union emission inventory report1990-2015 under the UNECE convention on long-rangetransboundary air pollution. Tech. rep., European En-vironment Agency.
Eriksson, L., Larsson, A., Thomasson, A., 2016. TheAAC2016 Benchmark - Look-Ahead Control of HeavyDuty Trucks on Open Roads. IFAC-PapersOnLine49 (11), 121 – 127, 8th IFAC Symposium on Advancesin Automotive Control AAC 2016.
Feru, E., Murgovski, N., de Jager, B., Willems, F., 2016.Supervisory control of a heavy-duty diesel engine withan electrified waste heat recovery system. Control Engi-
20
30
40
50
60
70
80
32.4 32.9 33.4 33.9
VG
T p
osit
ion (
%)
Total fuel mass (kg)
With the proposed VGT position controller
(all constrains are fulfilled)
Constraints on 1/λ arenot fulfilled
All constraints are fulfilled
Constraints on nt are
not fulfilled32.78
Fig. 9. Fuel consumption for fixed VGT positions and forcontrolled VGT positions.
neering Practice 54, 190 – 201.Fuglestvedt, J., Berntsen, T., Myhre, G., Rypdal, K.,
Skeie, R. B., 2008. Climate forcing from the transportsectors. Proceedings of the National Academy of Sci-ences 105 (2), 454–458.
Hamednia, A., Murgovski, N., Fredriksson, J., 2018. Pre-dictive velocity control in a hilly terrain over a longlook-ahead horizon. In: 5th IFAC Conference on Engineand Powertrain Control, Simulation and Modeling (E-CoSM18). pp. 1–6.
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019

Hong, S., Park, I., Chung, J., Sunwoo, M., August 2015.Gain scheduled controller of EGR and VGT systemswith a model-based gain scheduling strategy for dieselengines. In: 4th IFAC Workshop on Engine and Pow-ertrain Control, Simulation and Modeling E-COSM.Colombus, Ohio, USA, pp. 1–6.
Hong, S., Park, I., Shin, J., Sunwoo, M., May 2017.Multivariable controller with a gain scheduling strategyfor the exhaust gas recirculation and variable geometryturbocharger systems in diesel engines. ASME Journalof Dynamic Systems, Measurement, and Control 139.
Hovgard, M., Jonsson, O., Murgovski, N., Sanfridson, M.,Fredriksson, J., 2018. Cooperative energy managementof electrified vehicles on hilly roads. Control EngineeringPractice 73, 66 – 78.
Ilka, A., 2018. Matlab/Octave toolbox for structurableand robust output-feedback LQR design. IFAC-PapersOnLine 51 (4), 598 – 603, 3rd IFAC Conferenceon Advances in Proportional-Integral-Derivative Con-trol PID 2018.
Ilka, A., Vesely, V., March-April 2014. Gain-ScheduledController Design: Variable Weighting Approach. Jour-nal of Electrical Engineering 65 (2), 116–120.
Ilka, A., Vesely, V., 2017. Robust guaranteed costoutput-feedback gain-scheduled controller design. IFAC-PapersOnLine 50 (1), 11355 – 11360, 20th IFAC WorldCongress.
Johannesson, L., Nilsson, M., Murgovski, N., 2015. Look-ahead vehicle energy management with traffic predic-tions. IFAC-PapersOnLine 48 (15), 244 – 251, 4th IFACWorkshop on Engine and Powertrain Control, Simula-tion and Modeling E-COSM 2015.
Karim, M. R., Egardt, B., Murgovski, N., Gelso, E. R.,2018. Supervisory control for real-driving emission com-pliance of heavy-duty vehicles. In: 5th IFAC Confer-ence on Engine and Powertrain Control, Simulation andModeling (E-CoSM18). pp. 1–6.
Liu, L., Wei, X., Zhu, T., July 2008. Quasi-LPV gainscheduling control for the air path system of dieselengines. In: Control and Decision Conference, CCDC
2008. pp. 4893–4898.Murgovski, N., Egardt, B., Nilsson, M., 2016. Coopera-
tive energy management of automated vehicles. ControlEngineering Practice 57, 84 – 98.
NASEM, 2015. Review of the 21st Century Truck Part-nership: Third Report. National Academies of Sciences,Engineering, and Medicine, The National AcademiesPress, Washington, DC.
Park, I., Hong, S., Sunwoo, M., 2017. Gain-scheduledEGR control algorithm for light-duty diesel engines withstatic-gain parameter modeling. International Journal ofAutomotive Technology 18 (4), 579–587.
Rodrigue, J.-P., Notteboom, T., Comtois, C., Slack, B.,2017. The Geography of Transport Systems, 4th Edi-tion. Routledge, Taylor & Francis Group Ltd.
The Mathworks, Inc., 2017. MATLAB R2017a. The Math-works, Inc., Natick, Massachusetts.
Toh, K. C., Todd, M., Tutuncu, R. H., 1999. SDPT3 –a MATLAB software package for semidefinite program-ming. Optimization methods and software 11, 545–581.
Toth, R., 2010. Modeling and Identification of LinearParameter-Varying Systems, 1st Edition. Vol. 403 ofLecture Notes in Control and Information Sciences.Springer-Verlag Berlin Heidelberg.
Vesely, V., Ilka, A., Sep. 2013. Gain-scheduled PID con-troller design. Journal of Process Control 23 (8), 1141–1148.
Vesely, V., Ilka, A., July 2017. Generalized robust gain-scheduled PID controller design for affine LPV systemswith polytopic uncertainty. Systems and Control Letters105 (0), 6–13.
Wei, X., del Re, L., May 2007. Gain Scheduled H∞ Controlfor Air Path Systems of Diesel Engines Using LPVTechniques. IEEE Transactions on Control SystemsTechnology 15 (3), 406–415.
Wei, X., del Re, L., Liu, L., 2008. Air path identificationof diesel engines by LPV techniques for gain scheduledcontrol. Mathematical and Computer Modelling of Dy-namical Systems 14 (6), 495–543.
Submitted to the 9th IFAC International Symposium on Advances in Automotive Control, Orléans, France, 24-27 June 2019