-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
1/18
Implicit integration of plasticity models for granular
materials
Aylin Ahadi a,*, Steen Krenk b
a Division of Mechanics, Lund University, Box 118, S-221 00
Lund, Swedenb Department of Mechanical Engineering, Technical
University of Denmark, DK-2800 Lyngby, Denmark
Received 9 July 2002; received in revised form 14 April 2003;
accepted 23 April 2003
Abstract
A stress integration algorithm for granular materials based on
fully implicit integration with explicit updating is
presented. In the implicit method the solution makes use of the
gradient to the potential surface at the final stress state
which is unknown. The final stress and hardening parameters are
determined solving the non-linear equations itera-
tively so that the stress increment fulfills the consistency
condition. The integration algorithm is applicable for models
depending on all the three stress invariants and it is applied
to a characteristic state model for granular material. Since
tensile stresses are not supported the functions and their
derivatives are not representative outside the compressive
octant of the principal stress space. The elastic predictor is
therefore preconditioned in order to ensure that the first
predictor is within the valid region. Capability and robustness
of the integration algorithm are illustrated by simulating
both drained and undrained triaxial tests on sand. The algorithm
is developed in a standard format which can be
implemented in several general purpose finite element codes. It
has been implemented as an ABAQUS subroutine, and atraditional
geotechnical problem of a flexible strip footing resting on a
surface of sand is investigated in order to
demonstrate the global accuracy and stability of the numerical
solution.
2003 Elsevier B.V. All rights reserved.
Keywords: Integration algorithm; Granular materials; FE
implementation; Footing analysis; Large strains
1. Introduction
Modeling the behaviour of granular materials under various
loading conditions is technically important
and theoretically challenging. Recent advances in computational
techniques have made it possible to solve
advanced geotechnical engineering problems numerically using the
finite element method. The availabilityof powerful computers
enables engineers to perform a three-dimensional finite element
analysis of large
scale boundary value problems using realistic constitutive
models. The overall accuracy of the analysis is
directly affected by the precision of the numerical algorithm
used to integrate the constitutive equations.
This creates a need of developing accurate and robust
constitutive drivers that can easily be implemented in
finite element codes.
* Corresponding author.
E-mail address: [email protected] (A. Ahadi).
0045-7825/03/$ - see front matter 2003 Elsevier B.V. All rights
reserved.
doi:10.1016/S0045-7825(03)00354-2
Comput. Methods Appl. Mech. Engrg. 192 (2003) 34713488
www.elsevier.com/locate/cma
http://mail%20to:%[email protected]/http://mail%20to:%[email protected]/
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
2/18
In this paper a stress integration algorithm based on fully
implicit integration with explicit updating is
presented. The algorithm is applied to a non-associated
plasticity model for granular materials developed in
[1]. The model is a three-dimensional generalization of the
CamClay model, introducing dilation before
failure, dependence on the third stress invariant and a
consistent limitation to compressive stresses. TheCamClay model
based on the critical state concept developed in [2] is perhaps the
most widely used model
today for geotechnical analyses. It is formulated in the
two-dimensional stress space with mean stress p and
maximum shear stress 12q and includes isotropic hardening
only.
The CamClay model has been implemented using a return mapping
algorithm in [3] and later using
implicit integration algorithms in [46]. An extension of the
CamClay model including kinematic
hardening has also been integrated using an implicit formulation
[7]. The yield surface and plastic po-
tential function in the model used here are represented by
functions including the third stress invariant I3,
to accurately describe the behaviour in triaxial as well as
plane strain conditions. The elasticity in the
present model has the same simple form as in the original
CamClay with constant shear modulus and
bulk modulus increasing linearly with the mean stress. In this
model a characteristic state separating
contractive and dilative behaviour is distinguished from the
ultimate state, corresponding to perfectly
plastic behaviour. As a result, one of the major shortcoming in
the CamClay model is overcome, and
the dilative behaviour of granular material is modelled with
very good accuracy as demonstrated in [8].
This is achieved by introducing a hardening law depending on
both the shear and the volumetric strain
increments.
Fully implicit algorithms have been widely used in finite
element formulations, since they have shown
good robustness and efficiency for simple elasto-plastic
material models. Implicit integration of the con-
stitutive equations has also been used for more complex
elasto-plastic and viscoplastic constitutive relations
[9]. Plasticity formulations for granular materials including
the third stress invariant I3 are typically highly
non-linear. In recent years implicit solution strategies for
models depending on the third stress invariant
have been developed, for associative isotropic elasto-plastic
and viscoplastic models [10], for associative
elasto-plastic models with kinematic hardening [11] and for
models of general isotropic elasto-plastic
geomaterials [12]. To reduce the number of equations in the
implicit scheme fully implicit integration al-gorithms with
explicit updating have been developed, e.g. for J2 plasticity in
[13].
The third stress invariant I3 typically results in a high degree
of non-linearity and complex numerical
algorithms. The aim here is to develop an implicit integration
procedure for granular materials as simple
as the implicit integration algorithms developed for the CamClay
model, and at the same time more
general and suitable for more versatile constitutive models with
a high degree of non-linearity both in the
elastic as well as plastic components. The solution of the
non-linear constitutive equations is carried out
with the backward Euler difference scheme slightly modified
since the hardening parameter can be de-
termined explicitly at each intermediate state. The elastic
predictor is preconditioned in order to ensure
that it is inside the valid stress region, which for
cohesionless granular materials is the compressive
octant. The proposed numerical integration algorithm does not
depend on the particular set of con-
stitutive expressions. It is suitable for granular material and
can be extended to other both associated andnon-associated
plasticity based material models without any conceptual changes.
The algorithm can
therefore be expressed in a standard format which can be
implemented in several general purpose finite
element codes.
The capability, accuracy and robustness of the numerical
algorithm is tested at the local Gauss point
level, as well as at the global level using an implementation as
a plastic material model in the finite element
code ABAQUS. The performance of the integration procedure is
illustrated by simulating a triaxial test on
single element of sand. In addition a boundary value problem of
traditional flexible strip footing resting on
a surface of sand is investigated in order to demonstrate the
global accuracy and stability of the numerical
solution. General purpose finite element codes often contain a
finite strain implementation of plasticity
models, and this feature is also illustrated.
3472 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
3/18
2. Constitutive equations for infinitesimal plasticity
Assuming a small deformation during a generic increment of
loading, the infinitesimal strain tensor is
decomposed into elastic and plastic parts,de dee dep: 1
The elastic response of the material is characterized by the
generalized Hooke s law which relates stress and
elastic strain increments linearly through the elastic
constitutive tensor Ce. This relation expressed in a form
relating the component of the elastic strain increment to the
component of stress increment, takes the
following form:
dee C1e dr; 2where C1e is the elastic tangent flexibility
matrix.
In non-associated plasticity theory, the plastic strain
increment is proportional to the gradient of the
plastic potential. This is known as a flow rule where the
direction of dep is the gradient of the plastic
potential function and its magnitude is given by the plastic
multiplier dv,
dep dv ogorT
: 3
The plastic multiplier dv is determined by a plastic hardening
via the consistency relation, according to
which a stress point remains on the yield surface f during
plastic loading,
df ofor
dr Hdv 0: 4
H is the hardening parameter describing the evolution of the
plastic variables, and it typically consists of
two parts,
H ofoa
oa
ov H1H2: 5
The first factor H1 of=oa describes the changes in shape, size
and position of the yield surface, i.e. itsdependence on the
hardening parameters a, while the second factor H2 oa=ov describes
the evolution ofthe hardening parameters. In the case of multiple
hardening parameters a a1; a2; . . .T the factor H1 is arow vector,
while the factor H2 is a column vector.
For a plastic work hardening material there is only one
hardening parameter and the second part H2 can
conveniently be written as H2 og=orMar, where the matrix M
defines a weighting between hydrostaticand deviatoric plastic work.
In the following the hardening is assumed to depend only on the
current stress
state, and M is a constant matrix.
The elasto-plastic stiffness matrix Cep is needed for use in the
global, non-linear equation system forpredicting the size and
direction of the next strain increment. It is determined from (1)
by inserting the
relations between the stress increment dr and the elastic and
plastic strain increments respectively from (2)
and (3),
Cep Ce Ce og=orTof=orCe
H of=orCe og=orT ; 6
where the plastic multiplier dv has been eliminated by use of
the consistency relation (4).
In the following we will present an algorithm for computation of
stresses and hardening parameters
consistent with the predicted strain increment done by a
backward difference scheme.
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3473
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
4/18
3. Fully implicit integration with explicit updating
The solution of the global, non-linear FE-equations gives an
estimate of the total strain for each stress
point. The computation of corresponding stresses and hardening
parameters that fulfill the yield conditionis then performed by
integration of the constitutive equations. The precision of the
numerical algorithm
used to integrate these equations has a direct impact on the
overall accuracy of the global solution. For
elasto-plastic materials the constitutive equation are
non-linear and must thus be solved using iterative
techniques. While the equilibrium must be checked on the global
level, the integration of the stress in-
crement Drin for a given strain increment Dein can be performed
at each Gauss point independently. The
integration procedure described in the following concerns
determination of the stress increment at a single
point for a given total strain increment and the iteration index
i is generally omitted. The subscript (n 1)denotes the last
established equilibrium state, and subscript n denote the final,
still unknown state.
The purpose of the integration scheme is to determine the stress
changes Dr and hardening parameters
corresponding to a total change of displacement De within the
load increment. The total strain increment is
decomposed into elastic and plastic parts,
De Dee Dep: 7The plastic part of the strain increment is
estimated from the flow rule
Dep Dv og
or: 8
Depending on how the gradient og=or of the plastic potential
function is computed the two families ofnumerical algorithms are
obtained. In the generalized trapezoidal rule the gradient og=or is
represented asan average over the increment, while in the
generalized mid-point rule the gradient is evaluated at a rep-
resentative stress state. Use of the previous equilibrium stress
rn1 result in the forward Euler scheme, whileused of the final
stress rn gives the backward Euler scheme. These integration rules
have been evaluated in
[14] and the generalized mid-point rule was found to be
superior. However, the backward Euler scheme wasfound to be
numerically stable for larger strain increments, which is desirable
to use in FE-computations.
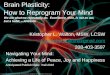
The backward Euler difference scheme is also considerably
simpler to implement, and therefore used in this
paper. Fig. 1 illustrates the iteration strategy based on the
backward difference, where Dr and r refers to the
current iteration, which converges to Drn, determining the
stress state rn.
Fig. 1. Geometric interpretation of stress point integration
algorithm.
3474 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
5/18
3.1. Integration scheme
The integration scheme determines the stress changes Dr and
hardening parameters corresponding to a
total change of displacement De within the load increment. In
the implicit backward Euler method thesolution makes use of the
final stress state rn; an. The final stress rn and hardening
parameters an aredetermined by solving the non-linear equations
iteratively so that the stress increment fulfills the consis-
tency condition. The current estimate state r; a is determined
in each iteration step relative to the lastequilibrium state rn1;
an1.
The total strain increment De en en1 is the sum of the elastic
and plastic parts, see (7). The elasticpart is written as Dee eern
eern1, while for the plastic part use of a non-associated flow rule
impliesDe
p Dvogrn=orT. Insertion into (7) yields
en en1 eern eern1 Dv ogrnorT
: 9
The stresses rn and the plastic multiplier Dv are unknown, while
the prescribed total strain en and terms
related to the previous equilibrium state (n 1) are known.The
computed stress and hardening parameters at final state (rn; an)
must fulfill the consistency relation
frn; an 0: 10The process of plastic loading is generally
associated with hardening, and the hardening parameters a must
be determined to satisfy
an an1 H2rnDv; 11where H2 oa=ov describes the hardening
parameters introduced in (5).
3.2. Newton iteration
The non-linear equation system comprising (9)(11) can be solved
using NewtonRaphson iteration
scheme. In the following a slightly modified version will be
employed, as it is possible to eliminate the
hardening equation (11) by calculating it exactly for each
intermediate state.
The incremental form of the constitutive relation (9) is
obtained by making a first order Taylor ex-
pansion around the current state (r; a). The elastic strain in
the last equilibrium state eern1 is constantduring iterations and
does not contribute. e is the current strain estimate obtained in
the previous iteration.
ei1n en1 ein en1
o
ore
e Dv ogorT
dr
i ogorT
dvi;
f
r
i1n ; a
i1n
f
r
in; a
in
of
ordr
i
of
oada
i;
ai1n an1 ain an1 Dv
oH2
ordr
i H2 dvi:
8>>>>>>>>>>>:
12
The subincrement of the hardening parameters dai ai1n ain can be
calculated explicitly for each inter-mediate state from the last
equation in (12)
dai Dvi oH2
ordr
i H2 dvi: 13
Insertion of (13) into the second equation in (12) allows us to
reduce the number of equations in the
iteration scheme. Introducing strain residual dei ei1n ein and
the residual of the yield function frin; aingives the following
non-linear equation system to be solved:
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3475
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
6/18
C1e Dvo2g
orTor
og
orT
of
or DvH1oH2
or H1H2
2
664
3
775i
dr
dv
!i
de
f
!i
; 14
where the elastic tangent flexibility matrix C1e oee=or has been
used.For a finite plastic step the iteration matrix in (14),
subsequently called A, is generally non-symmetric,
even for associated plasticity models. It has a similar form as
the algorithmic elasto-plastic stiffness matrix,
see e.g. [15], where the use of finite increments leads to
non-symmetric global stiffness matrix.
The equation system (14) is solved iteratively for dr; dvi, and
the increments (Dr;Dv) are updated bysubincrements until the
residuals are smaller than the prescribed tolerances,
Dri1 Dri dri; Dvi1 Dvi dvi: 15
Note, that while the final solution is independent of the
individual subincrement, the iterative scheme re-
quires yield function and gradients of the plastic potential
function to be defined also at the intermediate
states used for updates. After solving (14) the total increment
of the hardening parameter Da is updatedexplicitly,
Dan H2Dv: 16It is important to realize that the subsequent
update ofDa by use of (16) is necessary in order to ensure that
linearization of (11) does not produce any residual.
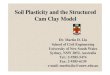
The iterations defined by (14) are carried out when the stress
point turns out to be in plastic loading.
Thus an iteration procedure must start with an elastic predictor
step r in order to determine, whether thereis plastic loading or
elastic unloading. In case of plastic loading the predictor leads
to a stress state outside
the current yield surface, as indicated in Fig. 2 and the
iteration matrix A in (14) is computed for (r; an1).The
NewtonRaphson procedure for calculation of the plastic corrector
corresponding to the elastic
predictor implicitly assumes the existence of the yield function
and the gradients of the yield function andthe plastic potential at
the current state. It is therefore essential that the first
estimated stress state r
corresponds to meaningful directions and magnitudes of the
iterative corrections. Yield functions and
plastic potentials depending on the third deviatoric stress
invariant J3 usually have equipotential surfaces
consisting of several sheets, and therefore the gradients may
point towards a secondary potential surface.
This creates a need for bringing the elastic predictor into the
valid domain. A robust way of doing that is
considered in the following section.
Fig. 2. Geometric interpretation of the first iterative
step.
3476 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
7/18
3.3. First preconditioning step
In most friction material models stiffness and gradients cannot
be evaluated in the tensile stress region.
Therefore, there is a need for an efficient way to ensure that
the first elastic predictor lies within the validdomain. In case of
the elastic predictor falling into the tensile region, the
algorithm should be able to pull it
inside the compression octant of the principal stress space
bounded by coordinate planes r1 0, r2 0 andr3 0. For any stress
state (r1;r2;r3) a pressure pc can be defined via the equation
r1 pcr2 pcr3 pc 0 17such that the translated stress state (r1
pc;r2 pc;r3 pc) is located on one of the coordinate planes ofthe
stress space coordinate system. In terms of the mean stress p, the
second and the third deviatoric in-
variants J2 and J3, this equation takes the following form:
J3 p pcJ2 p pc3 0: 18This is a cubic equation in pc and the
relevant roots are found by introducing the Lode angle h as
cos3h 3ffiffiffi
3p2
J3
J3=22
: 19
Substitution of J3 from (19) into (18) yields a new cubic
equation
4cos3 w 3cosw cos3h; cosw ffiffiffi
3p
2
p pcffiffiffiffiJ2
p : 20
The relevant root of (20) is obtained by setting cos 3h cos3/
and using the trigonometric identity4cos3 w 3cos w cos3w,
pc 2ffiffi3p
ffiffiffiffiJ2p
cos h p; 06 h6p=3; 21where h is determined from (19). Now, the
condition for determining whether a stress point lies within
the
compressive octant is the following:
pc6 0 ) inside the compressive octant;> 0 ) outside the
compressive octant:
&22
In case of the predictor stress point being outside the
compressive octant, it can be moved inside the
compressive octant by a correction consisting of a hydrostatic
translation and a reduction of the magnitude
of the deviatoric component. For a stress state r with mean
stress p this operation can be written as
r r pc1 /r p1 1 /r pc /p1; 23where 1 is the second order unit
tensor, and / < 1 is a scalar multiplier. The hydrostatic
translation
pc1
brings the stress on to one of the coordinate planes, while
application of the factor / to the deviatoriccomponent (r p1)
defines a contraction towards the hydrostatic axis. In the examples
the value / 0:01has been used.
4. Specific model formulation
The integration procedure described in the previous section is
applied to a non-associated plasticity
model for granular materials based on the concept of a
characteristic state where the incremental dilation
vanishes, [1]. The model is a three-dimensional generalization
of the classical CamClay model, which is
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3477
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
8/18
based on the classical critical state theory developed in [2]
and formulated in the two-dimensional stress
space with mean stress p and maximum shear stress 12q. The
elasticity in the present model has the same
simple form as in the original CamClay model with constant shear
modulus and bulk modulus increasing
linearly with the mean stress. In the present model the
characteristic state which separates the contractivefrom dilative
behaviour is distinguished from the ultimate state which
corresponds to perfectly plastic
behaviour. In the classical critical theory these two states
coincide into a single critical state and as a result
of this the transition to dilative behaviour before failure of
granular materials cannot be modelled. The
present more general but yet simple model has only six material
parameters which can be determined from
data of a single standard triaxial test according to the
calibration procedure developed in [8]. A brief de-
scription of the model is given below.
4.1. Description of non-associated plasticity model
The same generic format is used for both yield and plastic
potential surface families, having different
shapes controlled by shape functions. The yield criterion for a
plastic model defines whether plasticity is
activated or not. In terms of the mean pressure pand the third
stress invariant I3 the isotropic yield function
in the model is expressed as
fr I3 p3gfp: 24The yield function grows in self-similar way. The
shape parameter gf changes the deviatoric contour
continuously from triangular to circular when taking values
between 0 and 1. The shape parameter is
expressed in terms of the mean pressure as
gfp p=pfm: 25The size of the yield function is controlled by
parameter pf, which is the only hardening parameter in the
model, and the exponent m, assumed to be a material constant.
The plastic potential is assumed to be
associated in the deviatoric plane, while the volumetric part is
non-associated, leading to the similar formatas for the yield
surface,
gr I3 p3ggp: 26The shape function, which is derived from an
approximate friction hypothesis in [16], has the following
form:
gg 1 c2gp; cgp 1 p=pgn; 27
where the exponent n is assumed to be a material constant.
Use of associated deviatoric flow leads to identical deviator
contours for the yield and flow potential
functions, i.e. the shape function gf and gg are equal. For a
point of yielding this implies that gfgg
I3=p3 from which pg may be explicitly calculated. Since pg is
not an independent model parameter the sizeparameter of the yield
function pf is the only hardening parameter in the model, i.e. a
pf. The yieldsurface and plastic potential function are illustrated
in Fig. 3.
In elastic and elasto-plastic states it is assumed that the
specific volume depends linearly on the logarithm
of the mean pressure p,
deev j
pdp; dev k
pdp: 28
The two non-dimensional flexibility parameters j and k are the
inclination of the evlnp line in the elastic
and the elasto-plastic state, respectively. The elastic
constitutive matrix in six-component format is
3478 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
9/18
Ce G
a b b
b a b
b b a
1
1
1
26666664
37777775
; 29
where a p=jG 4=3 and b p=jG 2=3. The shear modulus G is assumed
to be constant.The direction of the plastic strain increment dep is
the gradient of the plastic potential function and its
magnitude is given by the plastic multiplier dv
dep dv ogor
: 30
The change of the yield function per unit change of the plastic
multiplier v is determined by the hardening
parameter H of=ov. The hardening of the yield function in the
present model is controlled by the sizeparameter pf, and thus
H ofopf
opf
ov H1H2: 31
By differentiating the yields function (24), the factor H1
becomes
H1 of
opf mp2
gm
1
=m
f : 32The hardening of the loading surface depends on both
plastic volumetric and deviatoric strain increments in
order to model dilatancy before failure of a normally
consolidated material. Thus, the hardening rule in the
model is a weighted sum of the volumetric and deviatoric parts
of the plastic work,
dpf 1k j pde
pv
wsT dep; 33where s is the deviatoric part of the stress, and e
is the deviatoric part of the strain. w is a small non-
dimensional weight parameter, assumed to be a material constant.
The value of w follows from the
introduction of the ultimate state line, which defines a stress
state of ideal plasticity. The value of w is
Fig. 3. (a) Yield surface, (b) plastic potential surface.
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3479
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
10/18
determined from the difference in inclination between the
characteristic state line Mc and ultimate state
line Mu. In the CamClay model the two lines are lumped into a
common critical state, i.e. w 0 and thehardening rule in CamClay
model is obtained from (33) by setting w 0. The disadvantage of
this isthat the hardening stops when de
p
v 0 and the material can never pass the characteristic line and
hencethe an important characteristic of granular material as
transition from compaction to dilation cannot berepresented.
Differentiating relation (33) after introducing the plastic
strain increments from (3), the hardening factor
H2 is obtained in the form
H2 opfov
1k j p
og
op
w og
oss
1k j
og
orMr; 34
where the stress r has been decomposed into hydrostatic pressure
p and deviatoric stress s. The matrix M
defines the general work hardening model and for the present
model it is
M 131 w11T wI 35
with I the identity matrix. M is a constant matrix and by
setting w 0 the volumetric hardening model ofthe critical state
theory, is obtained.
4.2. Gradients of the yield and plastic potential functions
The gradients of the yield function (24) and plastic potential
function (26) can be written in the similar
form
of
or oI3
or op
3gfor
oI3or
hfp21; 36
og
or oI3
or o
p3gg
or oI3
or hgp21; 37where the non-dimensional factors hf and hg have
been introduced as
hf 13p2
o
opp3gf 1
1
3m
gf; 38
hg 13p2
o
opp3gg 1 cg 1
1
2
3n
cg
: 39
It is important to notice that in the differentiation gf and gg
are the functions defined as gfp p=pfmand gg 1 c2gp, with cgp 1
p=pgn, while in the final results they are determined directly from
theconditions f
r
0 and g
r
0, respectively.
The second derivative of the plastic potential g needed for
computations is convenient written as
o2g
orTor o
2I3
orTor o
2p3ggorTor
o2I3
orTor 1
3h00gp11
T; 40
where h00g is defined as
h00g 1
3p
o2
op2p3gg 21 cg 1
1
3n 1 n 1
2
3n
cg
41
and as in the previous the differentiation is done for the
constant cg 1 p=pgn, while in the final form itis calculated
directly from gr 0 as c2g 1 I3=p3.
3480 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
11/18
The third stress invariant is defined as
I3 r11r22r33 2r23r31r12 r11r223 r22r231 r33r212: 42
Written in component form the first derivative of I3 becomes
oI3
orT
r22r33 r223r33r11 r231r11r22 r212
2r31r12 r11r232r12r23 r22r322r23r32 r33r12
26666664
37777775
43
and the second derivative is
o2
I3orTor
0 r33 r22 2r23 0 0r33 0 r11 0 2r31 0r22 r11 0 0 0 2r122r23 0 0
2r11 2r12 2r310 2r31 0 2r12 2r22 2r230 0 2r12 2r31 2r23 2r33
2
6666664
3
7777775: 44
Having computed the gradients of f and g the derivative of H2
with respect to r is obtained by differen-
tiation of (34),
oH2
orT 1k j M
og
orT
o
2g
orTorMrT
: 45
4.3. Integration algorithm
The constitutive calculations are performed using the implicit
integration algorithm formulated in
Section 3. For numerical computation it is convenient to express
the stress and the strain increment tensors
used in the stressstrain relations in six-component format as
follows:
r r11;r22;r33; r23;r13;r12; e e11; e22; e33; 2e23; 2e13; 2e12:
46The shear strain increments are multiplied with a factor two in
order to obtain tensor consistency and as in
most finite element codes tension is assumed to be positive. The
model operates with the traditional split of
stresses and strains into hydrostatic and deviatoric parts
p 131Tr; s r p1; 47
ev
1Te; e
e
1
3
ev1;
48
where p is the hydrostatic pressure, s is the deviatoric stress
tensor, ev is volumetric strain and e is deviatoricstrain
tensor.
Integration of the stresses and the hardening parameter for a
given strain increment requires evaluation
of the iteration matrix A. The current values of all terms in
(14) must be computed. In addition values of H2and oH2=or are
needed for updating the hardening parameter pf. These computation
implicitly assume A tobe well defined for every iteration, even for
the first. In the current model the yield function and plastic
potential function are third degree polynomials if the stress,
which leads to regions where the gradients do
not represent the assumed slope towards the yield and potential
surfaces, yielding invalid directions and
magnitude of the plastic strain increment. This problem is most
likely to occur near the tensile region where
the bounding triangle narrows in the solution space. Therefore
the elastic predictor should be scaled
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3481
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
12/18
rationally, so that it lies within the circumscribing triangle.
The elastic predictor is transformed as described
in Section 3.3. The Newton iteration are carried out and the
increments of stress and plastic multiplier are
updated by subincrements. The hardening parameter pf is updated
explicitly at each iteration. The sub-
sequent update of pf is necessary in order to ensure that
linearization of (11) do not produce any residual.
The iterations stop when the residuals of kdpfk=kdpf0k and
kdek=kde0k fulfill the required convergencetolerances p and e
respectively. The value of p and e used in the calculation is
10
8. This general, yetsimple, integration algorithm is summarized
in Table 1.
5. Numerical examples
The accuracy, stability and convergence properties of the
numerical algorithm are tested at both local
and global level. A single element test was carried out under
both drained and undrained conditions and the
boundary value problem chosen simulates a classical geotechnical
bearing capacity problem of a strip
footing resting on surface of sand. The model parameters were
determined using test data from a single
triaxial test on sand, [17], and calibration procedures
developed in [8]. The following material parameters
were used in the simulations G 11:3 MPa, k 0:0142, j 0:00755, n
0:959, m 0:600 and w 0:251.
5.1. Triaxial test on single element
To investigate the local stress integration algorithm a triaxial
test on single element has been simulated.The test starts at
initial hydrostatic pressure p0 0:2 MPa and the element was
compressed 5% of its initialheight in vertical direction. Both
triaxial drained and undrained tests have been considered here. It
is as-
sumed that the sand remains homogeneous and that no strain
localization occurs during the tests.
The increase of the solution accuracy with the increased step
number is ensured by the algorithmic
consistency. The algorithm is therefore tested for three
different size of steps and the number of steps is
varied between 15, 30 and 60. The simulation of undrained test
carried out with step number 60 is des-
ignated as the exact integration of the constitutive equations.
Then the same simulation are carried out for
step numbers 30 and 15. The comparison of these simulation are
seen in Fig. 4. The algorithm captures the
stressstrain responses with very good accuracy. The responses
are very similar and solutions with number
of steps greater that 30 are practically identical to the exact
solution.
Table 1
Integration algorithm
Inputs: en1, rn1, pn1f , en, Dv 0elastic predictor: r
rn
1
dr
e
en
en
1;rn
1
pc 2=ffiffiffi
3p J2 cos h p1st octant? if pc > 0 then r
1 /r pc /p1iterations i 1; 2; . . . ; imax
A Ar;pf;Dv, f fr;pfdr
dv
! A1 def
!
Dv Dv dvr r drpf pn1f H2rDvde en een1;rn1; r;Dvdpf pf
pI3=p31=m
current stress r rstop iteration when kdpfk=kdpf0k < p and
kdek=kde0k < e
rn r
3482 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
13/18
The drained triaxial test have been simulated for the same three
different numbers of steps 60, 30 and 15.
The comparison of these results are presented in Fig. 5. The
stressstrain curves are practically identical to
each other, demonstrating the good performance of the algorithm.
The volumetric curves are very similar
i.e. the algorithm captures the volumetric responses with very
good accuracy. For the solution with only 15
steps the loss of accuracy is relatively small considering the
large steps, and solutions with more than 30
steps are very close to the exact solution. These results
demonstrate the robustness and accuracy of the
integration algorithm. Table 2 illustrates the behaviour of the
integration algorithm for local iterations for
drained triaxial test. The residuals for four typical load steps
are presented and the number of iterationsneeded to meet the
convergence tolerance of 108 is between 4 and 5 per load step.
Fig. 4. Stressstrain curves for different numbers of steps,
undrained triaxial test.
Fig. 5. Stressstrain and volumetric curves for different numbers
of steps, drained triaxial test.
Table 2
Normalized residual strain norm kdek=kde0k for drained triaxial
testIteration Step 10 Step 20 Step 40 Step 50
1 1.0000e)00 1.0000e)00 1.0000e)00 1.0000e)00
2 1.9974e)02 1.0568e)02 8.7621e)02 3.0766e)02
3 3.3896e)04 8.9362e)05 5.5725e)03 2.9590e)04
4 4.4331e)08 8.9827e)09 3.0052e)05 8.7546e)08
5 8.4318e)10
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3483
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
14/18
The computational algorithm was also checked with respect to the
stress paths including load reversals.
Results of a typical load reversal path oabcd is seen in Fig. 6.
The unloadingreloading behaviour is
assumed to be elastic and the loading curve oac is the same as
that obtained without load reversals, which
shows the accuracy of the integration algorithm.
5.2. Footing analysis
The performance of the numerical algorithm at the global level
is investigated by multi-element test. A
traditional geotechnical problem of a flexible strip footing
resting on a surface of sand has been simulated.
The computations are performed using ABAQUS finite element code,
which provides a facility for im-
plementing user defined material behaviour in FORTRAN
subroutines. The constitutive model described
in Section 4.1 is programmed in the user subroutine UMAT. This
subroutine is called by ABAQUS at eachelement integration point,
for each increment, and during each load step. The main functions
of the
subroutine are to integrate stresses and solution dependent
state variables, and to provide the Jacobian
matrix oDr=oDe used in overall Newton iteration. For simplicity
in this version of the algorithm we use thecontinuum tangent
stiffness defined in (6), instead of the asymptotic tangent
stiffness matrix.
The number of solution dependent state variables and the
required material parameters are introduced in
an input file and the subroutine is linked with the
ABAQUS-solver. The hardening parameter pf is the only
state variable in the present UMAT and the material used in this
simulation is the same as the triaxial test
simulation with material parameters given in Section 5.
The finite element mesh of width 2 m and depth 1 m is shown in
Fig. 7. A strip footing may be considered
as a plane strain problem, but the analysis is made using the
three-dimensional finite element procedure
described in Section 3. A plane strain condition is applied by
restraining the degree of freedom normal tothe vertical plane. Due
to symmetry of geometry and loading only half of the footing is
modelled. The mesh
consist of 342 nodes and 144 eight-noded brick elements. Half of
the footing with 0.475 m width spans six
elements in the upper left corner of the mesh. As well as
choosing values of the material parameters, the
simulation requires definition of realistic initial conditions
prior the application of the footing load. The
initial condition in terms of stresses were generated in
preliminary step in which the unit weight c 0:2MN/m3 was applied,
the stresses at the Gauss points were computed and then
displacements were the reset
to zero. In addition a load of q 0:1 MN/m2 was applied on the
ground surface, and then the uniformlydistributed footing load was
applied in increments. The simulation failed to converge at footing
load of 2.65
MPa. The analytically computed ultimate load according to
Therzaghi s theory has been calculated to 2.735
MPa. The numerically computed limit solution is in good
agreement with this value.
Fig. 6. Stressstrain curve with load reversals.
3484 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
15/18
The numerical performance of the algorithm at both local and
global levels is illustrated in Tables 3 and
4. Table 3 shows the normalized strain norm of the strain
subincrement at the local level when using the
integration algorithm of Table 1. The quadratic convergence of
the local integration algorithm is seen
clearly. The global convergence of the equilibrium iterations is
illustrated in Table 4. Only the tangent
stiffness is transferred from the material subroutine UMAT to
the main program, and it is seen that the
convergence is fast, but not quadratic. The convergence criteria
for the nodal residual force is specified as a
tolerance 104 times the average nodal force, given in the last
row of the table, and this is combined with aconvergence tolerance
on the last displacement subincrement du of 103 times the
displacement increment
Du.Results of the FE simulation corresponding to the computed
limit load are summarized in Figs. 8 and 9
in which contour plots of the stress r22 in vertical direction
and mean stress p are reported.
Table 3
Normalized residual strain norm kdek=kde0k for top center
element below strip footingIteration Step 1 Step 30 Step 50
1 1.0000e)00 1.0000e)00 1.0000e)00
2 2.2024e)02 1.0533e)02 3.9310e)03
3 3.4069e)05 9.2453e)05 1.0898e)05
4 8.2574e)
10 7.1230e)
09 8.2481e)
11
Table 4
Residual nodal force in strip footing analysis
Iteration Step 1 Step 30 Step 50
1 4.038e)04 3.097e)05 7.214e)04
2 3.185e)05 3.547e)06 3.126e)05
3 2.073e)06 1.859e)07 1.946e)06
4 1.822e)07 5.770e)07
Mean force 6.462e)03 6.998e)03 7.558e)03
Fig. 7. FE-mesh and deformed mesh of the footing problem.
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3485
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
16/18
5.3. Large strain analysis
The effects of using large strains can be included in the
analysis in a simple way. The ABAQUS finite
element code provides a parameter NLGEOM accounting for
geometric non-linearities during the load
step. When activating this parameter the elements are formulated
in the current configuration using current
nodal position. The calculated stresses are the Cauchy stresses.
NLGEOM is included in the input file and
no modifications of the implemented integration algorithm are
needed. The footing problem in the previous
example was simulated using large strains. The initial
conditions prior the application of the footing loadwere applied in
a preliminary small strain step in the same way as described in the
previous example. The
uniformly distributed footing load was then applied including
the effects of large strains.
In Figs. 10 and 11 results from the large strain simulation are
compared to the small strain solution. As it
is seen in Fig. 10a, in the region near the footing center there
is no significant difference in the contact stress
beneath the footing between the two simulation, while in the
region near the edge the large strain solution
predicts somewhat lower contact stress. The distribution of the
vertical stress along the symmetry axis is
plotted in Fig. 10b. There is an obvious differences between the
two solutions. At the same depth the small
strain solution predicts higher stress in vertical direction
compared to the large strain solution. The com-
puted loaddisplacement curve of the center of the footing is
seen in Fig. 11. As expected the use of large
strains results in smaller vertical displacement compared to the
small strain solution.
Fig. 8. Stress r22 in vertical direction at the end of the
simulation.
Fig. 9. Mean stress at the end of the simulation.
3486 A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
17/18
6. Conclusions
A fully implicit stress integration algorithm with explicit
updating has been presented in this paper. The
final stresses and hardening parameters are determined solving
the non-linear equations iteratively so that
the stress increment fulfills the consistency condition. The
number of equation to be solved was reduced
since the hardening parameter can be updated explicitly. The
integration algorithm was applied to a
characteristic state model for granular materials developed in
[1], but it can be applied to other both as-
sociated and non-associated plasticity based material models
without any conceptual changes.
The good accuracy and robustness of the numerical algorithm has
been demonstrated at the local Gausspoint level, as well as at the
global level. Numerical results from triaxial tests on sand
illustrate the good
performance of the integration procedure. The global accuracy
and stability was demonstrated by per-
forming three-dimensional simulations of geotechnical
engineering problems. The boundary value problem
of traditional geotechnical flexible strip footing resting on a
surface of sand was investigated and the nu-
merical results show very good performance. The algorithm is
developed in a standard format which en-
ables implementation into multipurpose finite element codes, and
the present analyses were made using an
implementation of the material model in the ABAQUS code. This
code has a facility for using updated
geometry, simulating a sequence of incremental steps. The
computations were performed using both small
and finite strains, and comparison of the contact stress,
vertical distribution of the stress beneath the
footing and loaddisplacement curves demonstrate a visible but
moderate effect of finite strains.
Fig. 10. (a) Contact stress distribution beneath the footing,
(b) vertical stress distribution along the symmetry axis.
Fig. 11. Loaddisplacement curve of the footing center.
A. Ahadi, S. Krenk / Comput. Methods Appl. Mech. Engrg. 192
(2003) 34713488 3487
-
8/2/2019 Ahadi Implicit Integration of Plasticity Models for
Granular Materials
18/18