Embed Size (px)
Citation preview

Team Logo
Here
CanSat 2016 CDR: Team 8008 AGH Skydivers 1
CanSat 2016
Post Flight Review (PFR)Version 1.0
Team 8008
AGH Skydivers

Team Logo
Here
(If You Want)
2
Presentation Outline
Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Page no. Contents Presenter
3 Introduction Weronika Mrozińska
5 Systems Overview Weronika Mrozińska
18 Concept of Operations and Sequence of Events Weronika Mrozińska
23 Flight data analysis Jakub Rachucki
39 Failure alalysis Jakub Rachucki
44 Lessons Learned Jakub Rachucki

Team Logo
Here
(If You Want)
3
Team Organization
Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
4
Team Organization
Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
From left: Bartosz Moczała (Ground Station Crew), Jakub Rachucki (Ground Station Crew),
Weronika Mrozińska (Mission Control Officer), Zbigniew Kostka (Recovery Crew), Tomasz Strzałka (Recovery Crew).

Team Logo
Here
5
Systems Overview
Weronika Mrozińska
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want) Mission Summary
6Presenter: Weronika Mrozińska
Mission Objectives
Safely release the glider (SV) from the re – entry Container
Descent gliding in circular pattern of no more than 1000m in diameter and as closely to the 3.3m/s rate as possible
Collect telemetry data during flight and transmit them to the Ground Station in real time
Take pictures while requested
Land and process to the recovery mode
Bonus Objectives
Transmit image to ground station after each picture is taken.
Telemetry must still be sent during image transmission at the
1 Hz rate using the same XBee radio.
Rationale: comparing to the second possible bonus
objective, this selectable objective does not require any
additional mechanical components, therefore it does not
increase the mass of the CanSat, which is limited.
External Objectives
Our personal objective is to measure acceleration, rotational speed and magnetic field to simulate trajectory and orientation of
the glider.
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want) CanSat overview - container
7Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Container – made of GFRP ( Glass Fiber ReinforcedPolymer with Balsa wood)
Parachute.
Dummy mass.

Team Logo
Here
(If You Want) CanSat overview - payload
8Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Camera coverPitot tube module cover On-board computer cover
Buzzer Antenna
Carbon telescopic rods3d printed plane of attack
Carbon CanSat ribbing.

Team Logo
Here
(If You Want) CanSat overview - payload
9Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Slider
Rubber band
Camera Module3d printed structure parts
Nylon kite
Pitot tube

Team Logo
Here
(If You Want)
10
Components Summary & CanSat
Overall Cost – Hardware
Presenter: Weronika Mrozińska
Part Description Quantity Price[$] Total[$]
Sensors Subsystem
ORG1218 GPS receiver 1 35.07 35.07
BMP180 Pressure sensor 1 4.95 4.95
Eagle Tree Airspeed Micro SensorPitot tube+ pitot tube
sensor1 42.99 42.99
DS18B20 Temperature Sensor 1 3.09 3.09
LIS331 Accelerometer 1 5.65 5.65
HMC5883LSMD Magnetometer 1 5.98 5.98
LSM9DS0 IMU 1 7.89 7.89
TEPT4400 Light Sensor 3 0.58 1.74
uCamII Camera module 1 49.00 49.00
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
11
Components Summary & CanSat
Overall Cost – Hardware
Presenter: Weronika Mrozińska
Part Description Quantity Price[$] Total[$]
Structure
PLA 3D printing material 80g 0,035[$/g] 2.8
Carbon rods Rotation shafts. 0.9m 1,97[$/m] 1.77
CanSAT container SV is stored in container 1 20 20
Weights Container load N/A 2 2
Carbon tubes Kite holder 1.2m 4,7[$/m] 5.64
Ripstop Nylon Kite Material 0,126m2 25,91 [$/m2] 3.26
Rubber Wings opening mechanism 1 packet 1 1
Parachute Container recovery system 1 14,53 14.53
Swivel Container recovery system 1 3 3
Other PartsScrews for mounting
components, kite strings etc.N/A 10 10
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
12
Components Summary & CanSat
Overall Cost – Hardware
Presenter: Weronika Mrozińska
Part Description Quantity Price[$] Total[$]
CDH subsystem
ATXMEGA256A3BU CPU 1 8.47 8.47
Swissbit SFSD2048NgBW1MT-t-ME-1x1-STD
MicroSD card for industry 1 32.7 32.7
XBee Pro 50mW U.FL - Series 2B Radio module 1 38.77 38.77
2.4GHz Antenna Radio antenna 1 4.95 4.95
Buzzers Payload recovery - indicator 2 1 2
Other Parts Resistors, capacitors etc. 1 5 5
Electrical Power Subsystem
TrustFire Rechargeable Li-Ion 10440 AAA 3.7V 600mAh Battery
Main power source 1 8 8
FC0V474ZFTBR24 SUPERcapacitor
Backup source of power 1 2.72 2.72
317EMP Voltage regulator 1 0.48 0.48
LTC4065 Battery charger 1 1.31 1.31
Other Parts Resistors, capacitors etc. 1 5 5
Total cost of hardware $298.37
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
13
CanSat Overall Cost – Hardware
Presenter: Weronika Mrozińska
Budget summary
CanSat $298.37
Shipping $50.00
SUM: $348.37
Exchange rates used
£1,0000 $1.4200
€ 1,0000 $1.0800
CHF 1,0000 $0.9800
PLN 1,00 $0.2400
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
14
CanSat Overall Cost – Other Costs
Presenter: Weronika Mrozińska
Part Description Quantity Price[$] Total[$]
Ground Control System
XBee Pro 63mW RPSMA - Series 2B Radio module 1 42,55 42,55
Panel antenna IP-G14-F2425-HV Antenna for radio module 1 24,5 24,5
RP-SMA male to N male antenna cable.
Radio module 1,5 m 6 6
USB XBee Adapter Radio adapter 1 24,95 24,95
Testing & prototyping
PrototypingPrinting of components, making prototypes, etc.
N/A 300 300
TestingRenovating of old rocket, conducting rocket tests
N/A 3000 3000
Spare partsReplacing malfunctioning
partsN/A 200 200
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
15
CanSat Overall Cost – Other Costs
Presenter: Weronika Mrozińska
Part Description Quantity Price[$] Total[$]
Competition
Competition Fee N/A 1 100 100
Flights N/A 5 1029,08 5145.4
Meals N/A 72 12 864
Accommodation N/A 5 125 625
Renting a car N/A 1 520 520
Total $9284
Budget summary
Income (external sponsors)
+$11100
Own funds +$500
CanSat Budget – Hardware -$348.37
CanSat Budget – Other Costs
-$ 10852.40
Balance +$399.33
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want) Componets Summary
16
Electronics Mechanics GS
GPS receiver Main power source 3D printed Parts Radio module
Pressure sensor Backup source of power Rotation shafts.Antenna for
radio module
Pitot tube+ pitot tube sensor Voltage regulator Container Radio module
Temperature Sensor Battery charger Container load Radio adapter
Accelerometer Resistors, capacitors etc. CanSat Carbon ribbing
Magnetometer Radio antenna Kite Material
IMU Buzzer Wings opening mechanism
Light Sensor Container recovery system
Camera module Rubber bands
CPU Environmental protection elements
MicroSD card Nylon strings
Radio module Screws
Telecopic carbon tubes
Neodymium magnets
Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want) Physical layout
17Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
18
Concept of Operations and Sequence
of Events
Weronika Mrozińska
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want) Comparison of planned and actual Con-Ops
19Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Activitiy Execution
Launch Pass
Deploy CanSat from the rocket Pass
Collecting and sending data Pass
Open Parachute Pass
Separation Pass
Separate SV from the container Failed
Acquire picture Pass
Landing Pass/Failed
Data post-processing in GS Pass

Team Logo
Here
(If You Want) Release Logic
20Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Ligth sensors detect deployment from rocket
Altitude less then 450m
Nichrome wire for cutting string switched on for 14s
Redundancy:Possible to release the glider from container by using remote command

Team Logo
Here
(If You Want) Comparison of planned and actual SOE
21Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Stage Responsibilities Assigned person
Ca
nS
at
Pre
pa
rati
on
an
d
as
se
mb
ly
Arrive at launch site.
Whole Team
Preparation of the CanSat for turning in.
Checklist
• Communication test
• Structure check.
• Check battery level and on-board computer state.
• Check recovery system (unfolding of the kite)
CanSat assembly.
Final Check (checklist once again)
Turn in CanSat at the check-in table by noon.
Pre
flig
ht
Collect CanSat CanSat Crew
Load CanSat to rocket CanSat Crew
Verify the communication Ground station Crew
Take a rocket and the ground station to the launch pad GS Crew + CanSat Crew
Setting up the ground station GS Crew
Executing of launch procedures Mission control officer
Ground station Crew performing all required flight operation. (sending remote
commands etcGS crew

Team Logo
Here
(If You Want) Comparison of planned and actual SOE
22Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Stage Responsibilities Assigned person
Mis
sio
n
CanSat is launched
Mission control officer
CanSat deployment from the rocket.
Container parachute flight
Separation at 400m +/- 10m
Deplyment from container
Glider flight
Touchdown
• Buzzer on
• Telemetry off.
Ground station Crew performing all required flight operation. (sending
remote commands etc.GS crew
Re
co
ve
ry
After all CanSat launched recovery crew head out for CanSat recovery. Recovery Crew
Clearing out the ground station to make it available for the rest of the tames. GS Crew
Turning in the thumb drive with saved telemetry in CSV format. GSCrew
Recovery crew comeback with the CanSat for PFR analysis. Recovery Crew
An
aly
sis
Collecting data obtain from sensors.
Whole TeamIn case of telemetry fail recover data from the on-board computer.
Analysis of obtained data.
Mission assessment and preparation for the presentation.

Team Logo
Here
23
Flight Data Analysis
Jakub Rachucki
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
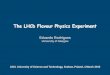
(If You Want) Payload Separation Altitude
24Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
407,6m
There is signal lag in
the GPS signal-
which is normal for
high velocities.
Altitude which is
coming form
pressure sensor is
relative to the
ground.
GPS altitude is
relative to sea level.

Team Logo
Here
(If You Want) Payload Separation Altitude
25Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
407,6m
There was no
deplyment due to the
structure faliure.
Separation module
started working when
altitude dropped below
450m

Team Logo
Here
(If You Want) Payload Separation Altitude
26Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
After separation, SV was stuck in the container. Nevertheless separation was conducted.

Team Logo
Here
(If You Want) Payload Separation Altitude
27Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Separation was conducted on altitude 407,6 m.

Team Logo
Here
(If You Want) CanSat Altitude
28Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Altitude based on GPS data, ploted on the map.

Team Logo
Here
(If You Want) Descent Rate Before Separation
29Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Descent rate before separation was equal to the one calculated and tested – approx. 8m/s

Team Logo
Here
(If You Want) Payload descent rate below separation
30Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Time elapsed from the moment of separation until touchdown was approx. 50sThe calculated and tested descent time was 125 +/- 15s

Team Logo
Here
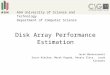
(If You Want) Images
31Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want) Images
32Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Part of the field was localized using „googlemaps”.
Photo confirms that there was no deployment. Part of the container can be seen in the picture.
Picture shows part of the field.

Team Logo
Here
(If You Want)
Payload Telemetry – SV Pressure
Sensor Data
33Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Not even single frame was lost during mission

Team Logo
Here
(If You Want)
Payload Telemetry – SV Temperature
Data
34Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Payload Telemetry – SV Battery
Voltage Data
35Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
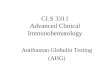
(If You Want) Selectable Objective Data
36Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Acquiring photo via Xbee
Photo shows part of the field.
The same Xbee was used to send telemetry data and picture.
Picture transmission didn’t disturb telemetry
Picture transmission was 17 s long.
Photo command was send when CanSat was on the 218m. Due to very late time of the photo command a part of the photo was not received, CanSat was stillsending photo after touchdown.
Full Xbee frequency transmission possibilities were used in order to send this photo

Team Logo
Here
(If You Want) Personal Objective
37Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Measure acceleration, rotational speed and magnetic field to simulate trajectory and orientation of the glider

Team Logo
Here
(If You Want) Personal Objective
38Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
39
Failure Analysis
Jakub Rachucki
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Identification of failures, root causes,
and corrective actions
40Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Failures:
Gliders stuck in the container
Root causes
Spare container was used as we forgot dedicated one
Glider stuck due to the fact that the foil got sticky under high temperature
Investigation:
Altitude and velocity plot shows movement
String was cut
Voltage plot shows drop of the voltage value after crossing 450 meters, which was defined altitude for separation.
Reason of the failure visible after recovery

Team Logo
Here
(If You Want)
Identification of failures, root causes,
and corrective actions
41Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Altitude plot shows drop of altitude after separation time

Team Logo
Here
(If You Want)
42Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Identification of failures, root causes,
and corrective actions
Vertical velocity plot show „velocity value pick” during separation which indicates glider movement

Team Logo
Here
(If You Want)
43Presenter: Jakub Rachucki CanSat 2016 CDR: Team 8008 AGH Skydivers
Identification of failures, root causes,
and corrective actions
Corrective actions:
Use dedicated container
Perform whole mission once again in Poland using„Beta” Rocket, made by AGH Space Systems

Team Logo
Here
44
Lessons Learned
Jakub Rachucki
CanSat 2016 CDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Discussion of what worked and
what didn't
45Presenter: Weronika Mrozińska
ID Requirement
1 Total mass of the CanSat (container and payload) shall be 500 grams +/- 10 grams.
2 The glider shall be completely contained in the container. No part of the glider may extend beyond the container.
3Container shall fit in a cylindrical envelope of 125 mm diameter x 310 mm length including the container passive descent control system.
Tolerances are to be included to facilitate container deployment from the rocket fairing.
4The container shall use a passive descent control system. It cannot free fall. A parachute is allowed and highly recommended. Include a spill
hole to reduce swaying.
5 The container shall not have any sharp edges to cause it to get stuck in the rocket payload section.
6 The container shall be a florescent color, pink or orange.
7 The rocket airframe shall not be used to restrain any deployable parts of the CanSat.
8 The rocket airframe shall not be used as part of the CanSat operations.
9 The CanSat (container and glider) shall deploy from the rocket payload section.
10 The glider must be released from the container at 400 meters +/- 10 m.
11The glider shall not be remotely steered or autonomously steered. It must be fixed to glide in a preset circular pattern of no greater than
1000 meter diameter. No active control surfaces are allowed.
12 All descent control device attachment components shall survive 30 Gs of shock.
13 All descent control devices shall survive 30 Gs of shock.
CanSat 2016 PDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Discussion of what worked and
what didn't
46Presenter: Weronika Mrozińska
ID Requirement
14 All electronic components shall be enclosed and shielded from the environment with the exception of sensors.
15 All structures shall be built to survive 15 Gs acceleration.
16 All structures shall be built to survive 30 Gs of shock.
17 All electronics shall be hard mounted using proper mounts such as standoffs, screws, or high performance adhesives.
18 All mechanisms shall be capable of maintaining their configuration or states under all forces.
19 Mechanisms shall not use pyrotechnics or chemicals.
20Mechanisms that use heat (e.g., nichrome wire) shall not be exposed to the outside environment to reduce potential risk of setting vegetation
on fire.
21 During descent, the glider shall collect air pressure, outside air temperature, and battery voltage once per second.
22 During descent, the glider shall transmit all telemetry at a 1 Hz rate.
23Telemetry shall include mission time with one second or better resolution, which begins when the glider is powered on. Mission time shall be
maintained in the event of a processor reset during the launch and mission.
24 XBEE radios shall be used for telemetry. 2.4 GHz Series 1 and 2 radios are allowed. 900 MHz XBEE Pro radios are also allowed.
25 XBEE radios shall have their NETID/PANID set to their team number.
26 XBEE radios shall not use broadcast mode.
CanSat 2016 PDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Discussion of what worked and
what didn't
47Presenter: Weronika Mrozińska
ID Requirement
27 The glider shall have an imaging camera installed and pointing toward the ground.
28 The resolution of the camera shall be a minimum of 640x480 pixels in color.
29 Cost of the CanSat shall be under $1000. Ground support and analysis tools are not included in the cost.
30 Each team shall develop their own ground station.
31 All telemetry shall be displayed in real time during descent.
32 All telemetry shall be displayed in engineering units (meters, meters/sec, Celsius, etc.)
33 Teams shall plot data in real time during flight.
34 The ground station shall include one laptop computer with a minimum of two hours of battery operation, xbee radio and a hand held antenna.
35The ground station must be portable so the team can be positioned at the ground station operation site along the flight line. AC power will
not be available at the ground station operation site.
36 Both the container and glider shall be labeled with team contact information including email address.
37The flight software shall maintain a count of packets transmitted, which shall increment with each packet transmission throughout the
mission. The value shall be maintained through processor resets.
38 No lasers allowed.
39The glider must include an easily accessible power switch which does not require removal from the container for access. Access hole or
panel in the container is allowed.
CanSat 2016 PDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Discussion of what worked and
what didn't
48Presenter: Weronika Mrozińska
ID Requirement
40 The glider must include a battery that is well secured to power the glider.
41 Lithium polymer cells are not allowed due to being a fire hazard.
42 Alkaline, Ni-MH, lithium ion built with a metal case, and Ni-Cad cells are allowed. Other types must be approved before use.
43 The glider shall receive a command to capture an image of the ground and store the image on board for later retrieval.
44 The telemetry shall indicate the time the last imaging command was received and the number of commands received.
45The glider vehicle shall incorporate a pitot tube and measure the speed independent of GPS. The speed shall be compared with GPS
speed.
46 The glide duration shall be as close to 2 minutes as possible.
47 The CanSat shall have a payload release override command to force the release of the payload in case the autonomous release fails.
48 A buzzer must be included that turns on after landing to aid in location.
49 Glider shall be a fixed wing glider. No parachutes, no parasails, no autogyro, no propellers.
CanSat 2016 PDR: Team 8008 AGH Skydivers

Team Logo
Here
(If You Want)
Discussion of what worked and what
didn't
49Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
Container descent control system worked. Descent was stable and within assumed speed limit
CanSat structure survived touchdown without any damage
System of wings unfolding worked- telescopic carbon rods were extended
Buzzer worked and helped to easily recover the CanSat
Autonomous fly state detection worked. Fly software was able to detect: rocket fly, descent, deployment from the rocket, touchdown, separation and camera state
Sensor worked perfectly
Sending of photo didn’t disturbed telemetry transmission
Photo was sent using same Xbee as for telemetry
Separation mechanism worked - string was cut on altitude of 407,6m
GS application worked perfectly. Data was plotted in real time and fly software states were displayed on the front panel
Telemetry worked flawlessly, not even single package was lost
Antenna gun-like holder help to maintain successful communication
Professional short coaxial antenna cable ensure small power loss during communication
None of the environmental protection elements was damaged
SV release from the container

Team Logo
Here
(If You Want) Conclusions
50Presenter: Weronika Mrozińska CanSat 2016 CDR: Team 8008 AGH Skydivers
All of the subsystems and mechanisms worked
Dedicated container should be used
The CanSat is able to be launched agained
Thank you for the great competition!