Embed Size (px)
Citation preview
Advanced Problems of Lateral-Directional Dynamics !
Robert Stengel, Aircraft Flight Dynamics!MAE 331, 2016
•! 4th-order dynamics–! Steady-state response to control–! Transfer functions–! Frequency response–! Root locus analysis of parameter variations
•! Residualization
Copyright 2016 by Robert Stengel. All rights reserved. For educational use only.http://www.princeton.edu/~stengel/MAE331.html
http://www.princeton.edu/~stengel/FlightDynamics.html
Flight Dynamics!595-627!
1
Learning Objectives
Stability-Axis Lateral-Directional Equations
!!r(t)
! !"(t)!!p(t)! !#(t)
$
%
&&&&&
'
(
)))))
=
Nr N" Np 0
*1Y"
VN0 g
VNLr L" Lp 0
0 0 1 0
$
%
&&&&&&&
'
(
)))))))
!r(t)!"(t)!p(t)!#(t)
$
%
&&&&&
'
(
)))))
+
~ 0 N+R
0 0L+A ~ 00 0
$
%
&&&&&
'
(
)))))
!+A!+R
$
%&
'
()
!x1!x2!x3!x4
"
#
$$$$$
%
&
'''''
=
!r!(
!p!)
"
#
$$$$$
%
&
'''''
=
Yaw Rate PerturbationSideslip Angle PerturbationRoll Rate PerturbationRoll Angle Perturbation
"
#
$$$$$
%
&
'''''
!u1!u2
"
#$$
%
&''=
!(A!(R
"
#$
%
&' =
Aileron PerturbationRudder Perturbation
"
#$$
%
&''
With idealized aileron and rudder effects (i.e., N!!A = L!!R = 0)
2
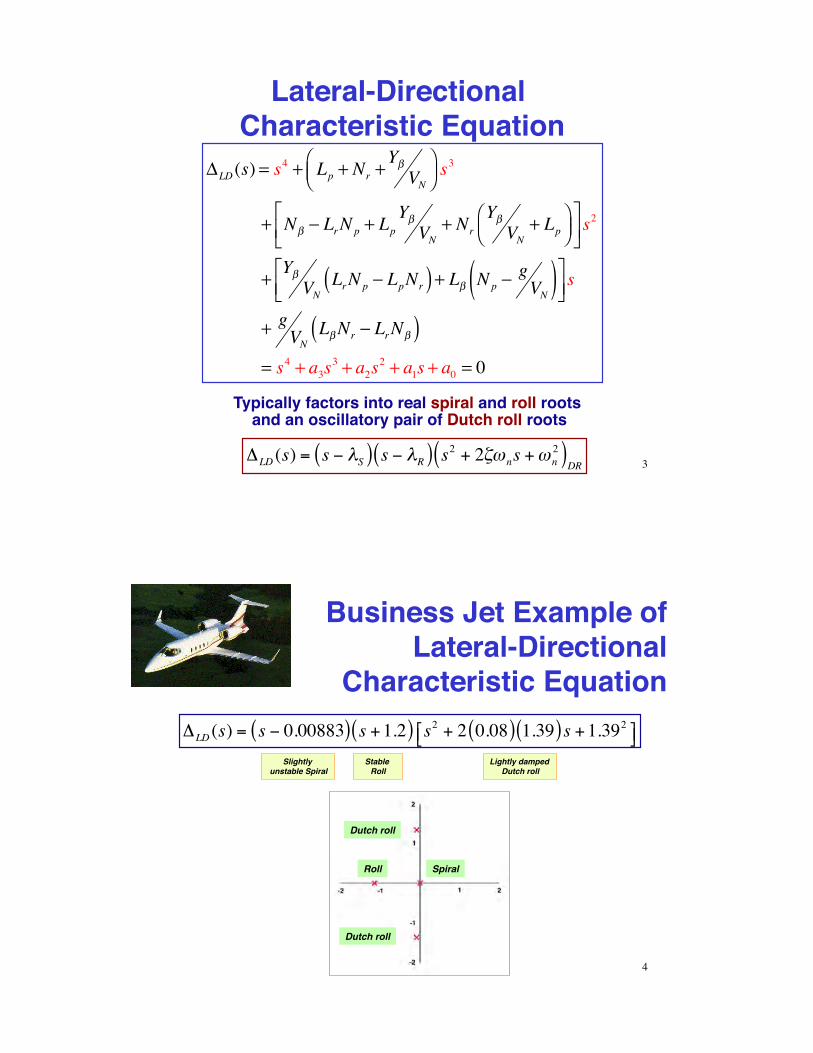
Lateral-Directional Characteristic Equation
!LD (s) = s " #S( ) s " #R( ) s2 + 2$%ns +%n2( )DR
Typically factors into real spiral and roll roots and an oscillatory pair of Dutch roll roots
!LD (s) = s4 + Lp + Nr +
Y"VN
#$%
&'( s
3
+ N" ) LrNp + LpY"VN
+ NrY"VN
+ Lp#$%
&'(
*+,
-./s2
+ Y"VN
LrNp ) LpNr( ) + L" Np )gVN( )*
+,-./s
+ gVN
L"Nr ) LrN"( )= s4 + a3s
3 + a2s2 + a1s + a0 = 0
3
Business Jet Example of Lateral-Directional
Characteristic Equation!LD (s) = s " 0.00883( ) s +1.2( ) s2 + 2 0.08( ) 1.39( )s +1.392#$ %&
Slightly unstable Spiral
Stable Roll
Lightly damped Dutch roll
Dutch roll
Spiral
Dutch roll
Roll
4
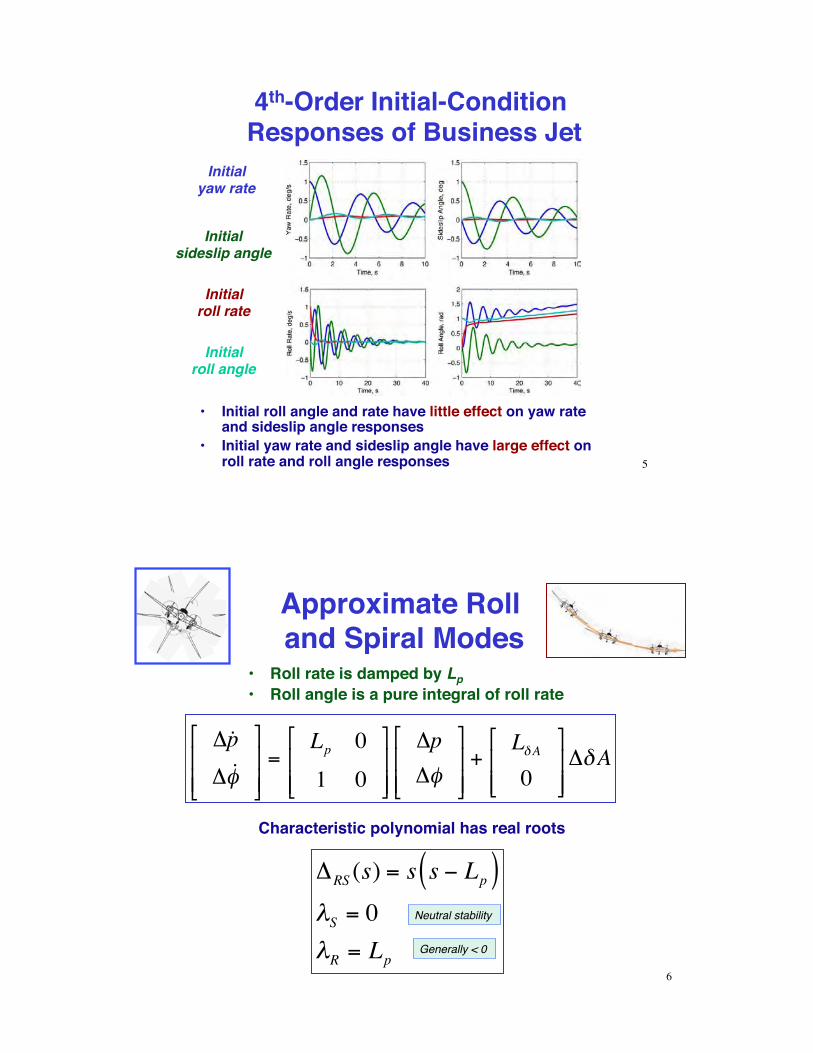
4th-Order Initial-Condition Responses of Business Jet
•! Initial roll angle and rate have little effect on yaw rate and sideslip angle responses
•! Initial yaw rate and sideslip angle have large effect on roll rate and roll angle responses
Initial yaw rate
Initial sideslip angle
Initial roll rate
Initial roll angle
5
Approximate Roll and Spiral Modes
!!p! !"
#
$%%
&
'((=
Lp 0
1 0
#
$%%
&
'((
!p!"
#
$%%
&
'((+
L)A0
#
$%%
&
'((!)A
!RS (s) = s s " Lp( )#S = 0#R = Lp
Characteristic polynomial has real roots
•! Roll rate is damped by Lp•! Roll angle is a pure integral of roll rate
Neutral stability
Generally < 0
6
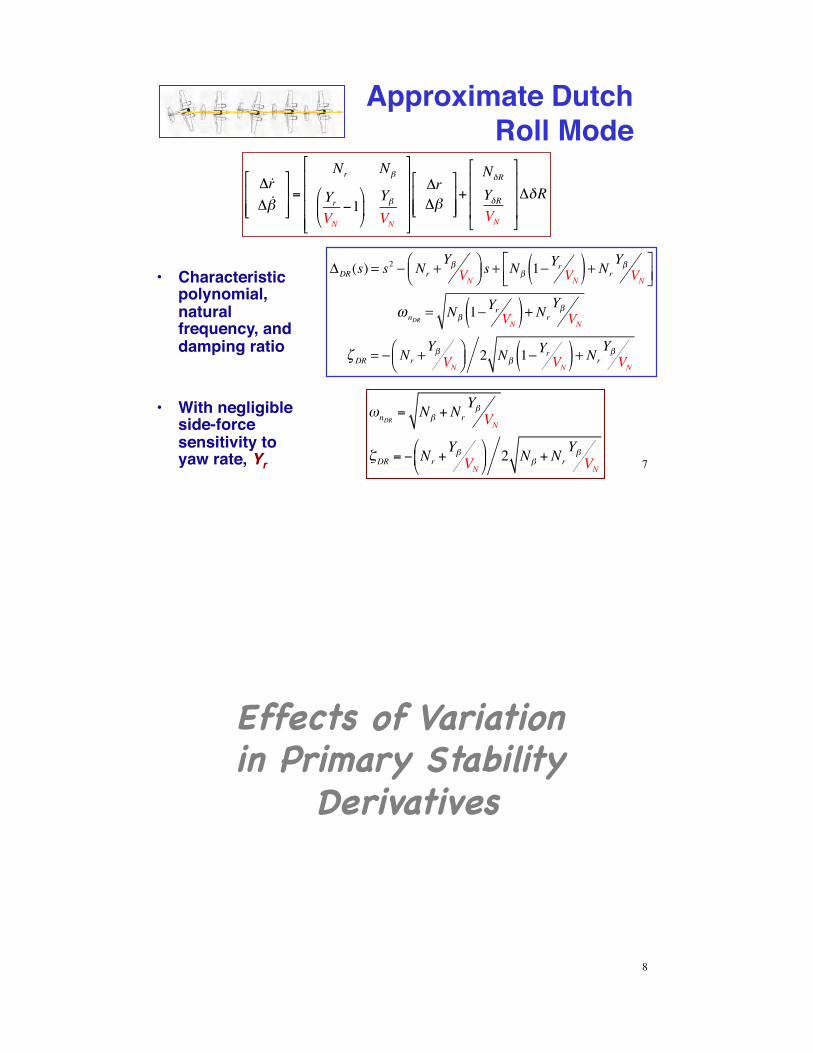
Approximate Dutch Roll Mode
!!r! !"
#
$%%
&
'((=
Nr N"
YrVN
)1*
+,
-
./
Y"VN
#
$
%%%%
&
'
((((
!r!"
#
$%%
&
'((+
N0R
Y0RVN
#
$
%%%
&
'
(((!0R
!DR(s) = s2 " Nr +
Y#VN
$%&
'() s + N# 1"
YrVN( ) + Nr
Y#VN
*+,
-./
0 nDR= N# 1"
YrVN( ) + Nr
Y#VN
1 DR = " Nr +Y#VN
$%&
'() 2 N# 1"
YrVN( ) + Nr
Y#VN
!nDR= N" +Nr
Y"VN
#DR = $ Nr +Y"VN
%
&'
(
)* 2 N" +Nr
Y"VN
•! With negligible side-force sensitivity to yaw rate, Yr
•! Characteristic polynomial, natural frequency, and damping ratio
7
Effects of Variation in Primary Stability
Derivatives!
8
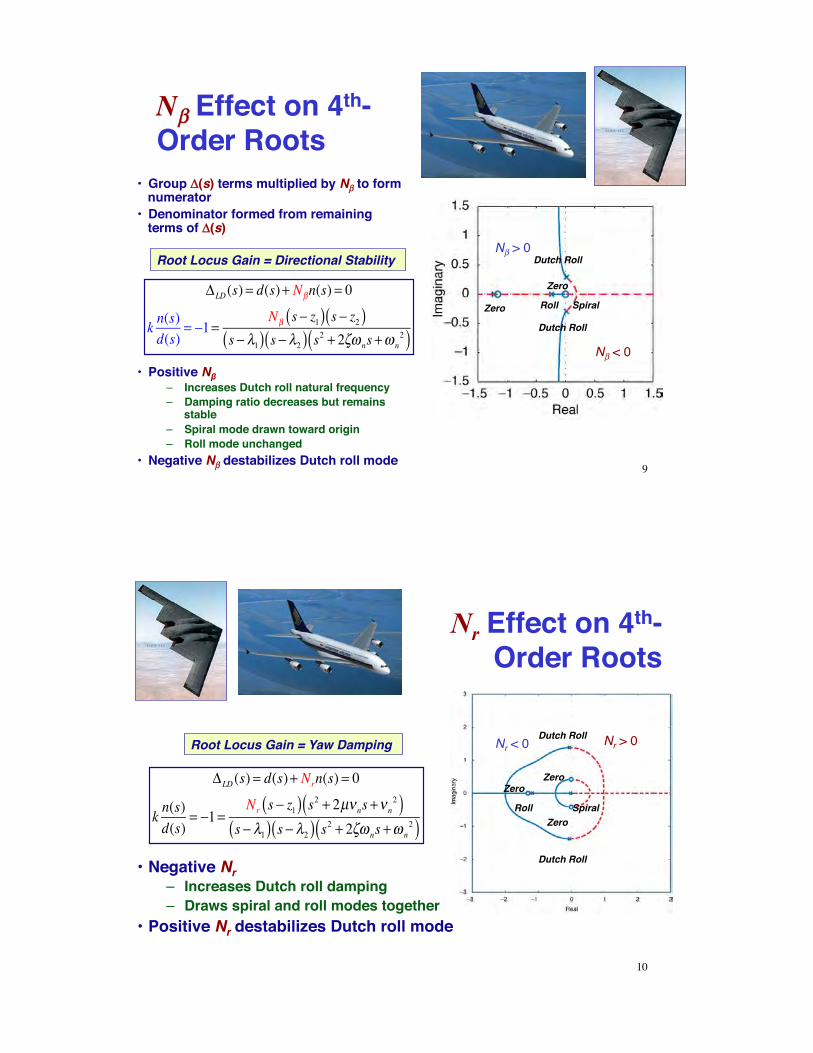
N"" Effect on 4th-Order Roots
•! Group !!(s) terms multiplied by N"" to form numerator
•! Denominator formed from remaining terms of !!(s)
!LD (s) = d(s)+ N"n(s) = 0
k n(s)d(s)
= #1=N" s # z1( ) s # z2( )
s # $1( ) s # $2( ) s2 + 2%& ns +& n2( )
N" > 0
N" < 0•! Positive N!
–! Increases Dutch roll natural frequency –! Damping ratio decreases but remains
stable–! Spiral mode drawn toward origin–! Roll mode unchanged
•! Negative N"" destabilizes Dutch roll mode
Root Locus Gain = Directional Stability
Roll Spiral
Dutch Roll
Dutch Roll
Zero
Zero
9
Nr Effect on 4th-Order Roots
!LD (s) = d(s)+ Nrn(s) = 0
k n(s)d(s)
= "1=Nr s " z1( ) s2 + 2µ#ns +#n
2( )s " $1( ) s " $2( ) s2 + 2%& ns +& n
2( )•!Negative Nr
–! Increases Dutch roll damping –! Draws spiral and roll modes together
•!Positive Nr destabilizes Dutch roll mode
Nr < 0 Nr > 0Root Locus Gain = Yaw Damping
Roll Spiral
Zero
Dutch Roll
Dutch Roll
Zero
Zero
10
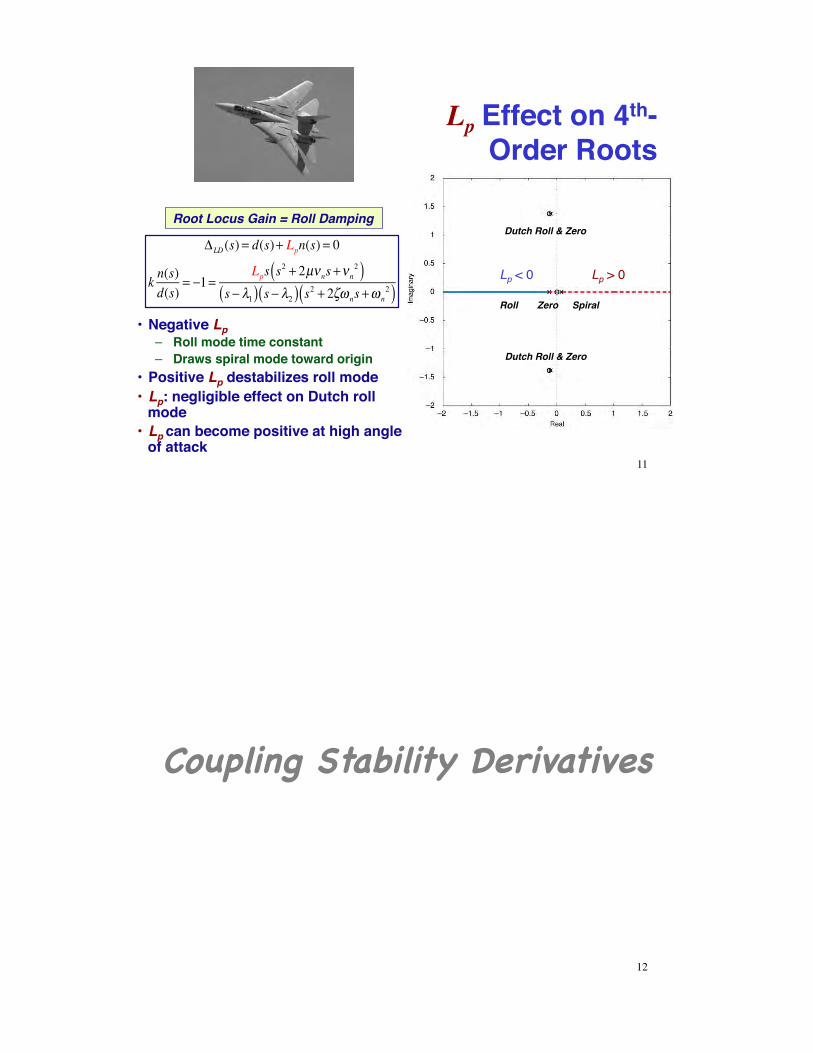
Lp Effect on 4th-Order Roots
!LD (s) = d(s)+ Lpn(s) = 0
k n(s)d(s)
= "1=Lps s
2 + 2µ#ns +#n2( )
s " $1( ) s " $2( ) s2 + 2%& ns +& n2( )
Lp < 0 Lp > 0
•! Negative Lp –! Roll mode time constant–! Draws spiral mode toward origin
•! Positive Lp destabilizes roll mode•! Lp: negligible effect on Dutch roll
mode•! Lp can become positive at high angle
of attack
Root Locus Gain = Roll Damping
Roll SpiralZero
Dutch Roll & Zero
Dutch Roll & Zero
11
Coupling Stability Derivatives!
12
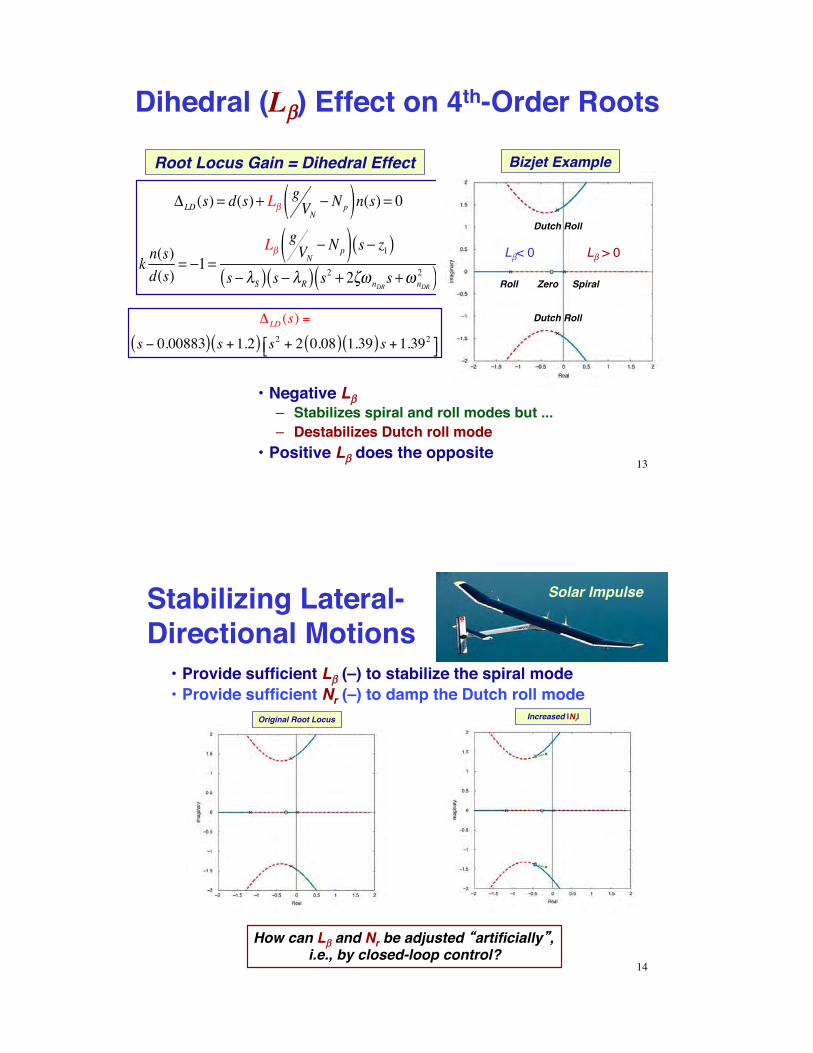
Dihedral (L"") Effect on 4th-Order Roots
•!Negative L"" –! Stabilizes spiral and roll modes but ...–! Destabilizes Dutch roll mode
•!Positive L"" does the opposite
Root Locus Gain = Dihedral Effect
!LD (s) = d(s)+ L"gVN
# Np( )n(s) = 0k n(s)d(s)
= #1=L"
gVN
# Np( ) s # z1( )s # $S( ) s # $R( ) s2 + 2%& nDR
s +& nDR2( )
L"< 0 L" > 0
Bizjet Example
!LD (s) =
s " 0.00883( ) s +1.2( ) s2 + 2 0.08( ) 1.39( )s +1.392#$ %&
Roll SpiralZero
Dutch Roll
Dutch Roll
13
Stabilizing Lateral-Directional Motions
•!Provide sufficient L"" (–) to stabilize the spiral mode•!Provide sufficient Nr (–) to damp the Dutch roll mode
How can L"" and Nr be adjusted artificially , i.e., by closed-loop control?
Original Root Locus Increased |Nr|
Solar Impulse
14
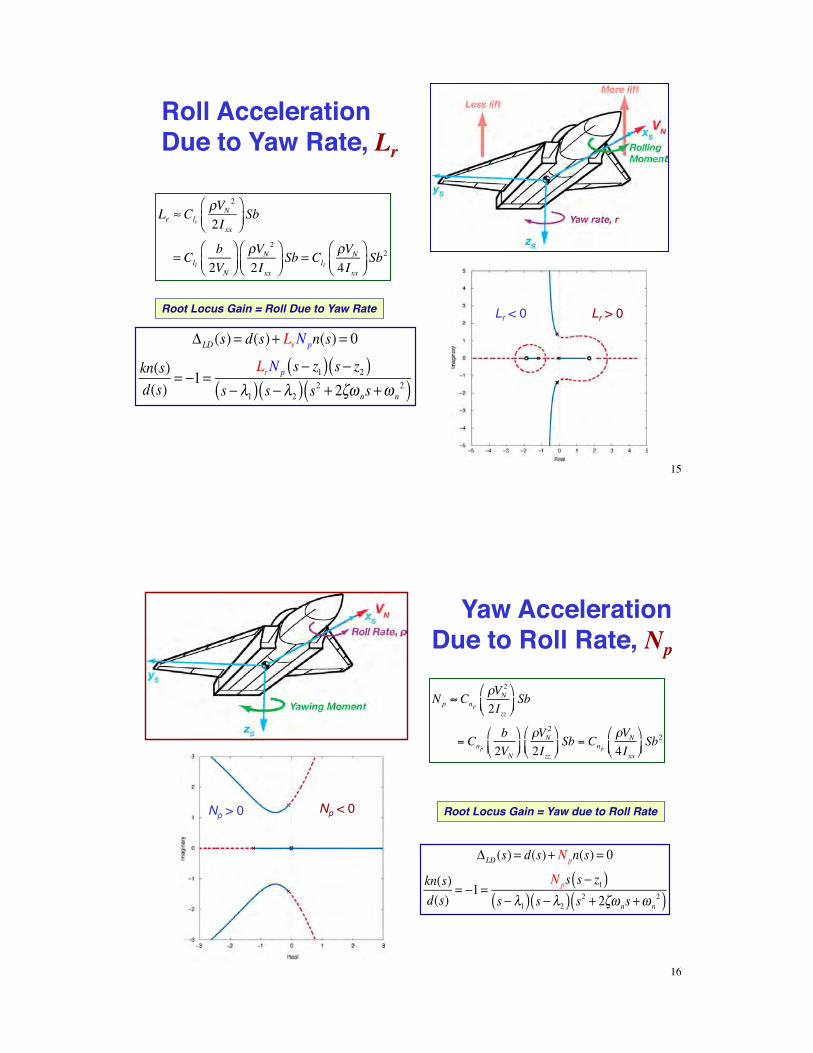
Roll Acceleration Due to Yaw Rate, Lr
Lr !Clr
"VN2
2Ixx
#$%
&'(Sb
= Clr̂
b2VN
#$%
&'(
"VN2
2Ixx
#$%
&'(Sb = Clr̂
"VN4Ixx
#$%
&'(Sb2
15
!LD (s) = d(s)+ LrNpn(s) = 0
kn(s)d(s)
= "1=LrNp s " z1( ) s " z2( )
s " #1( ) s " #2( ) s2 + 2$% ns +% n2( )
Root Locus Gain = Roll Due to Yaw Rate Lr < 0 Lr > 0
Yaw Acceleration Due to Roll Rate, Np
Np ! Cnp
"VN2
2Izz
#
$%&
'(Sb
= Cnp̂
b2VN
#
$%&
'("VN
2
2Izz
#
$%&
'(Sb = Cnp̂
"VN4Ixx
#
$%&
'(Sb2
16
!LD (s) = d(s)+ Npn(s) = 0
kn(s)d(s)
= "1=Nps s " z1( )
s " #1( ) s " #2( ) s2 + 2$% ns +% n2( )
Np > 0 Np < 0 Root Locus Gain = Yaw due to Roll Rate
Oscillatory Roll-Spiral Mode!RSres
= s " #S( ) s " #R( ) or s2 + 2$% ns +% n2( )RS
The characteristic equation factors into real or complex roots
Real roots are roll mode and spiral mode when
L!Nr > LrN! and
Np L! + LrY! /VN( ) 2 gVN
L!Nr " LrN!( )#
$%
&
'( <1
L!Nr < LrN!
Complex roots produce roll-spiral oscillation or lateral phugoid mode when
17
Roll-Spiral Oscillation of the M2-F2 Lifting Body Test Vehicle
18
4th-Order Frequency Response!
19
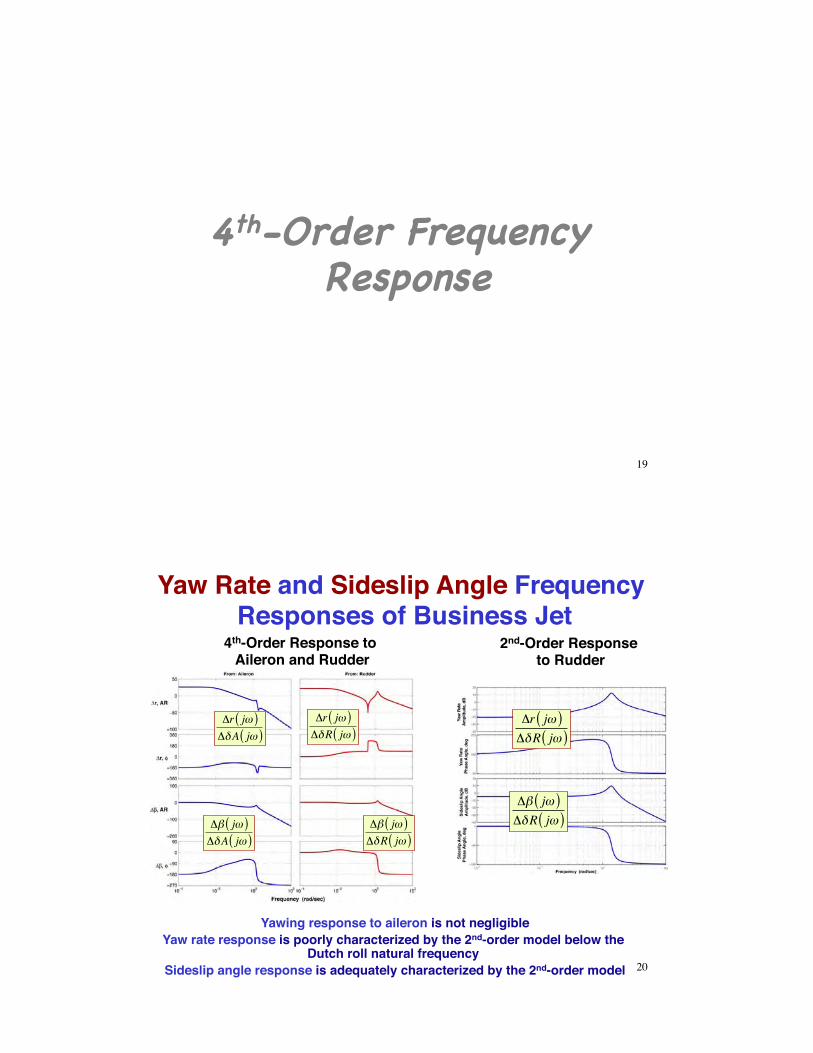
Yaw Rate and Sideslip Angle Frequency Responses of Business Jet
2nd-Order Response to Rudder
Yawing response to aileron is not negligibleYaw rate response is poorly characterized by the 2nd-order model below the
Dutch roll natural frequency Sideslip angle response is adequately characterized by the 2nd-order model
4th-Order Response to Aileron and Rudder
!r j"( )!#A j"( )
!" j#( )!$A j#( )
!r j"( )!#R j"( )
!" j#( )!$R j#( )
!r j"( )!#R j"( )
!" j#( )!$R j#( )
20
Roll Rate and Roll Angle Frequency Responses of Business Jet
2nd-Order Response to Aileron
Roll response to rudder is not negligibleRoll rate response is marginally well characterized by the 2nd-order model
Roll angle response is poorly characterized at low frequency by the 2nd-order model
!p j"( )!#R j"( )
!" j#( )!$R j#( )
!p j"( )!#A j"( )
!" j#( )!$A j#( )
!p j"( )!#A j"( )
!" j#( )!$A j#( )
4th-Order Response to Aileron and Rudder
21
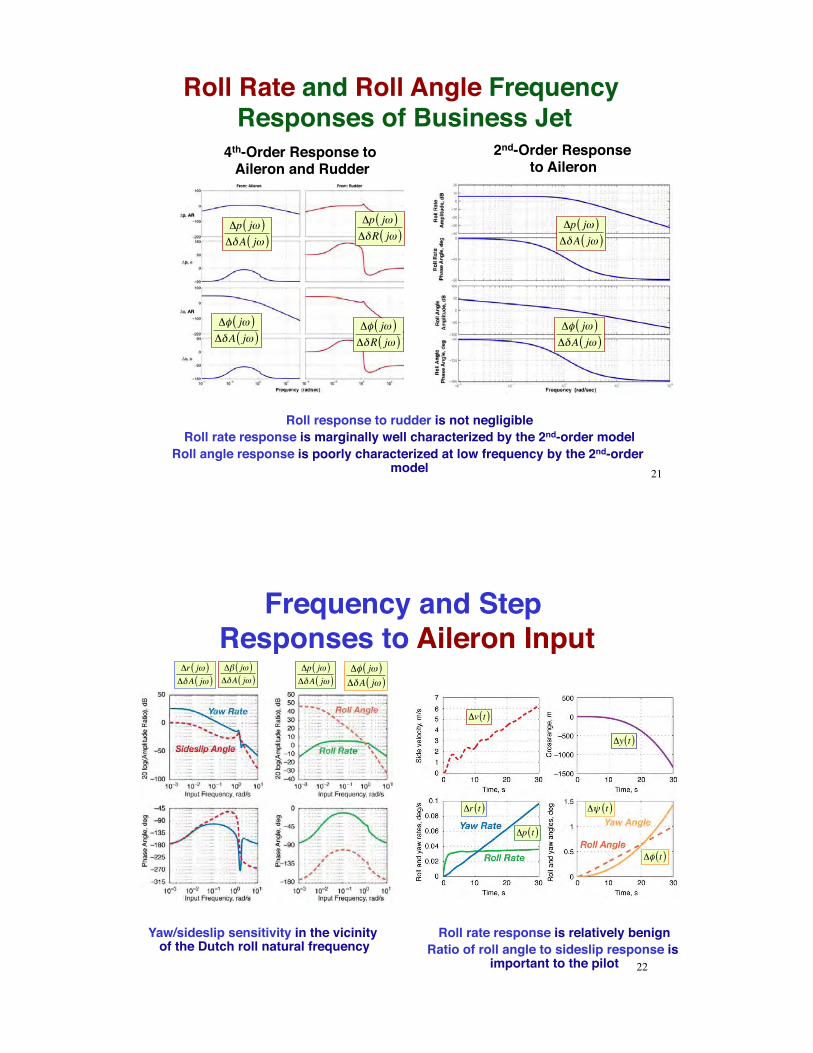
Frequency and Step Responses to Aileron Input
Roll rate response is relatively benignRatio of roll angle to sideslip response is
important to the pilot
Yaw/sideslip sensitivity in the vicinity of the Dutch roll natural frequency
!r j"( )!#A j"( )
!" j#( )!$A j#( )
!p j"( )!#A j"( )
!" j#( )!$A j#( )
!v t( )
!y t( )
!r t( )
!p t( )
!" t( )
!" t( )
22
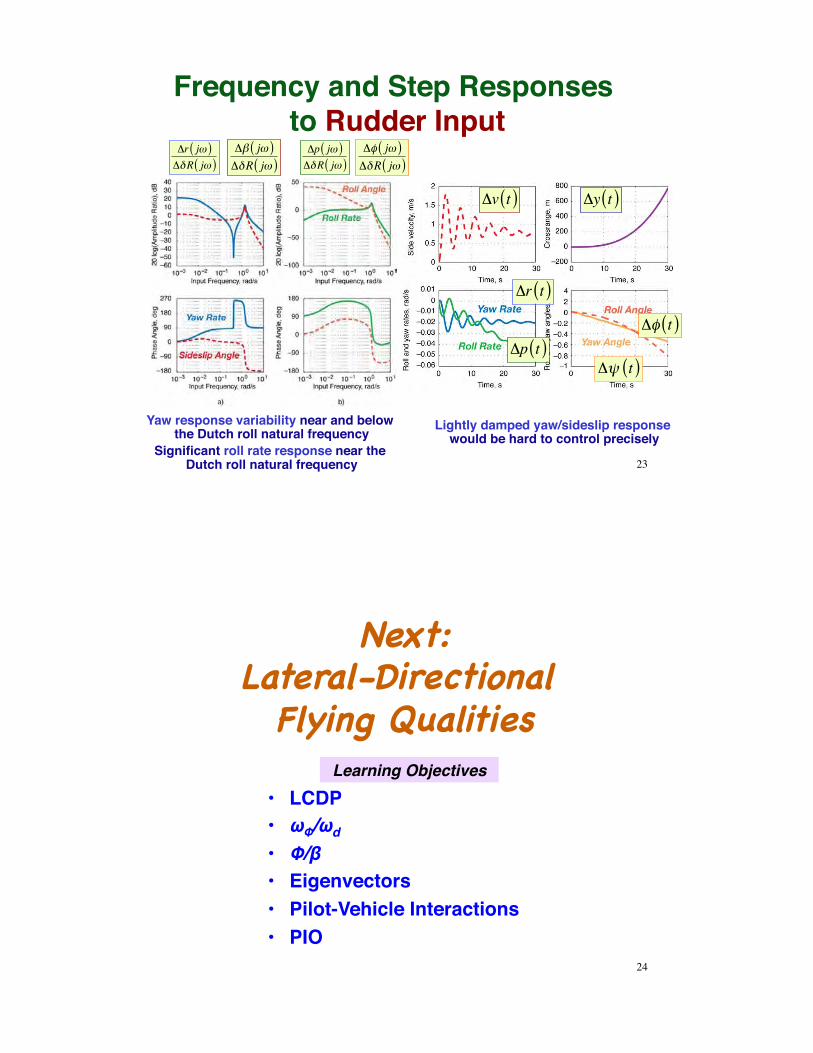
Frequency and Step Responses to Rudder Input
Lightly damped yaw/sideslip response would be hard to control precisely
Yaw response variability near and below the Dutch roll natural frequency
Significant roll rate response near the Dutch roll natural frequency
!r j"( )!#R j"( )
!" j#( )!$R j#( )
!p j"( )!#R j"( )
!" j#( )!$R j#( )
!v t( ) !y t( )
!r t( )
!p t( )!" t( )
!" t( )
23
24
Next:!Lateral-Directional
Flying Qualities!Learning Objectives
•! LCDP•! "#/"d•! #/!•! Eigenvectors•! Pilot-Vehicle Interactions•! PIO
Supplemental Material!
25
Review Questions!!! What is a flying qualities “thumbprint?”!!! What is the best Cooper-Harper pilot rating?!!! What is MIL-F-8785C?!
!! What are the Airplane Types?!!! What are the Flight Phases?!!! What are the Levels of Performance?!
!! What is the “Time to Double?”!!! What is the “Control Anticipation Parameter?”!!! What is the “C* Criterion?”!!! What is the “Gibson Dropback Criterion for Pitch
Angle Control?”!
26
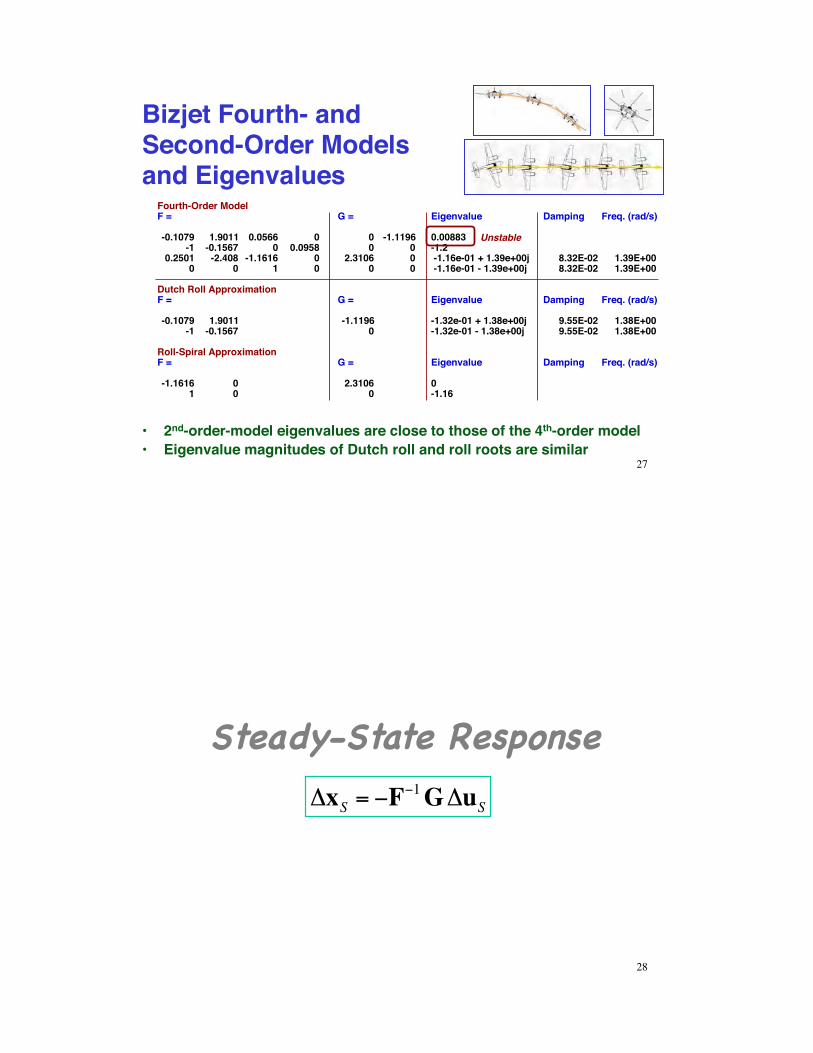
•! 2nd-order-model eigenvalues are close to those of the 4th-order model•! Eigenvalue magnitudes of Dutch roll and roll roots are similar
Bizjet Fourth- and Second-Order Models and Eigenvalues
Fourth-Order ModelF = G = Eigenvalue Damping Freq. (rad/s)
-0.1079 1.9011 0.0566 0 0 -1.1196 0.00883
-1 -0.1567 0 0.0958 0 0 -1.20.2501 -2.408 -1.1616 0 2.3106 0 -1.16e-01 + 1.39e+00j 8.32E-02 1.39E+00
0 0 1 0 0 0 -1.16e-01 - 1.39e+00j 8.32E-02 1.39E+00
Dutch Roll ApproximationF = G = Eigenvalue Damping Freq. (rad/s)
-0.1079 1.9011 -1.1196 -1.32e-01 + 1.38e+00j 9.55E-02 1.38E+00
-1 -0.1567 0 -1.32e-01 - 1.38e+00j 9.55E-02 1.38E+00
Roll-Spiral ApproximationF = G = Eigenvalue Damping Freq. (rad/s)
-1.1616 0 2.3106 0
1 0 0 -1.16
Unstable
27
Steady-State Response!!xS = "F
"1G!uS
28
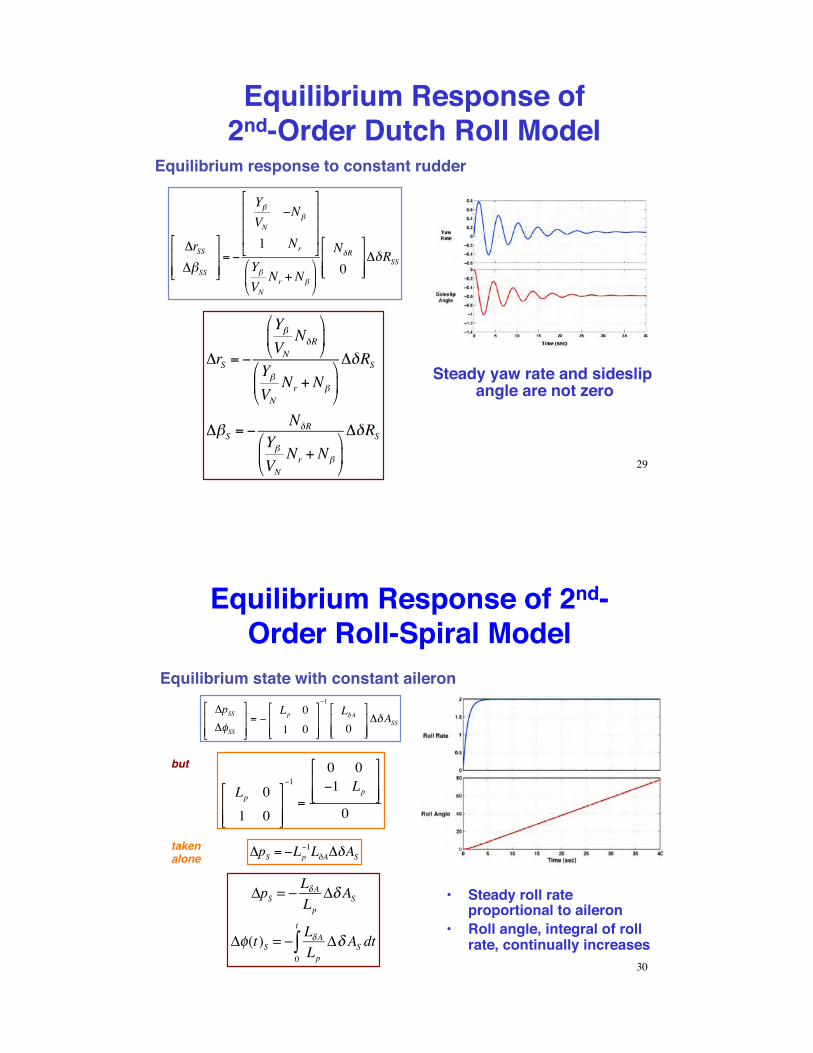
Equilibrium Response of2nd-Order Dutch Roll Model
!rSS!"SS
#
$%%
&
'((= )
Y"VN
)N"
1 Nr
#
$
%%%
&
'
(((
Y"VN
Nr +N"
*
+,
-
./
N0R
0
#
$%%
&
'((!0RSS
!rS = "
Y#VN
N$R
%
&'
(
)*
Y#VN
Nr +N#
%
&'
(
)*
!$RS
!#S = "N$R
Y#VN
Nr +N#
%
&'
(
)*
!$RS
Equilibrium response to constant rudder
Steady yaw rate and sideslip angle are not zero
29
Equilibrium Response of 2nd-Order Roll-Spiral Model
!pS = " L#A
Lp
!#AS
!$(t)S = " L#A
Lp
!# AS dt0
t
%
!pSS!"SS
#
$%%
&
'((= )
Lp 0
1 0
#
$%%
&
'((
)1L*A0
#
$%%
&
'((!*ASS
Lp 0
1 0
!
"##
$
%&&
'1
=
0 0'1 Lp
!
"##
$
%&&
0
but
•! Steady roll rate proportional to aileron
•! Roll angle, integral of roll rate, continually increases
Equilibrium state with constant aileron
!pS = "Lp"1L#A!#AS
taken alone
30
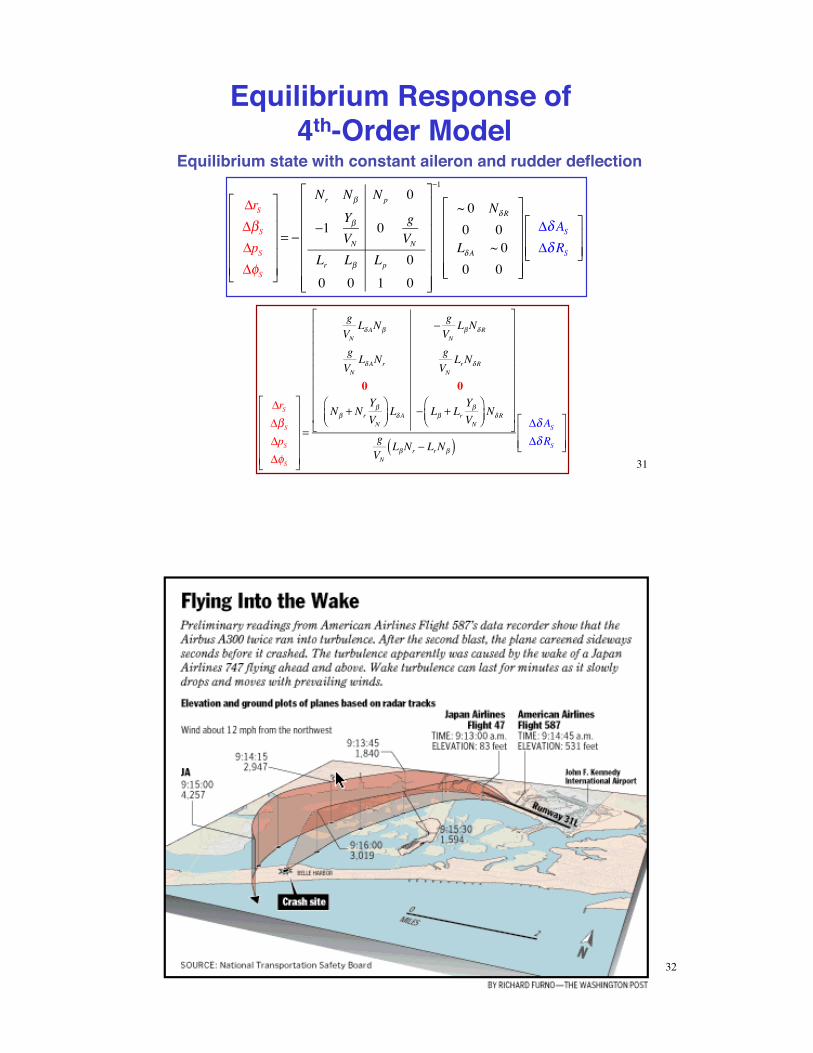
Equilibrium Response of 4th-Order Model
Equilibrium state with constant aileron and rudder deflection
!rS!"S
!pS!#S
$
%
&&&&&
'
(
)))))
= *
Nr N" Np 0
*1Y"
VN0 g
VNLr L" Lp 0
0 0 1 0
$
%
&&&&&&&
'
(
)))))))
*1
~ 0 N+R
0 0L+A ~ 00 0
$
%
&&&&&
'
(
)))))
!+AS!+RS
$
%&&
'
())
31
!rS!"S
!pS!#S
$
%
&&&&&
'
(
)))))
=
gVN
L*AN" + gVN
L"N*R
gVN
L*ANrgVN
LrN*R
0 0
N" + Nr
Y"
VN,-.
/01L*A + L" + Lr
Y"
VN,-.
/01N*R
$
%
&&&&&&&&&
'
(
)))))))))
gVN
L"Nr + LrN"( )!*AS!*RS
$
%&&
'
())
32
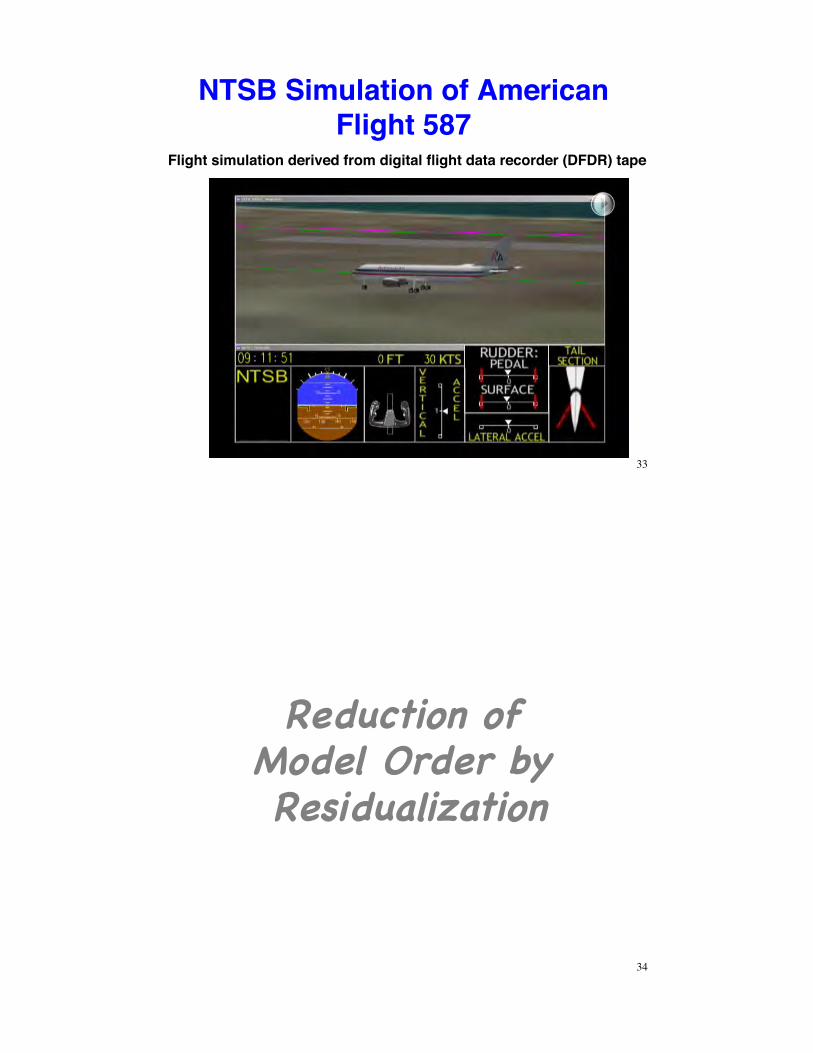
NTSB Simulation of American Flight 587
Flight simulation derived from digital flight data recorder (DFDR) tape
33
Reduction of Model Order by Residualization!
34
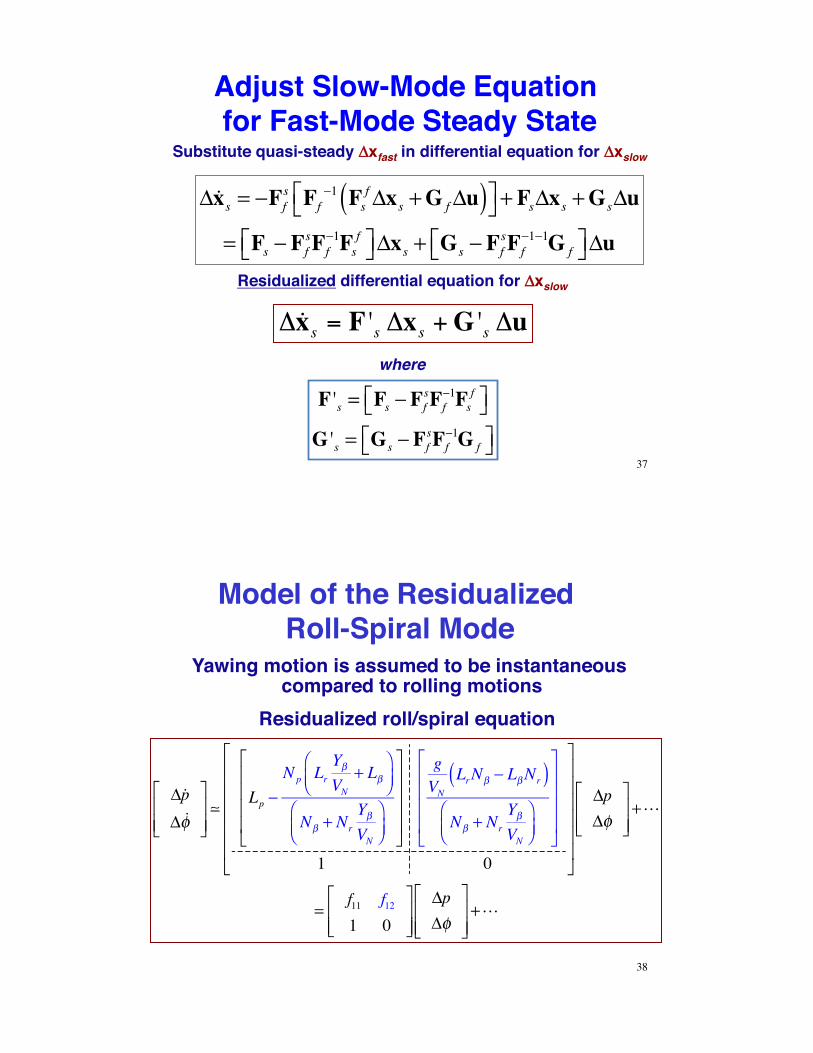
Approximate Low-Order Response
•! Dynamic model order can be reduced when–! One mode is stable and well-damped, and it and is
faster than the other–! The two modes are coupled
!!x fast
!!xslow
"
#
$$
%
&
''=
Ffast Fslowfast
Ffastslow Fslow
"
#
$$
%
&
''
!x fast
!xslow
"
#
$$
%
&
''+
G fast
Gslow
"
#
$$
%
&
''!u
!!x f = Ff!x f + Fsf!xs +G f!u
!!xs = Ffs!x f + Fs!xs +Gs!u 35
Express as 2 separate equations
Approximation for Fast-Mode ResponseAssume that fast mode reaches steady state very quickly
compared to slow-mode response
!!x f " 0 " Ff!x f + Fsf!xs +G f!u
!!xs = Ffs!x f + Fs!xs +Gs!u
Steady-state solution for !!xfast
0 ! Ff"x f + Fsf"xs +G f"u
Ff"x f = #Fsf"xs #G f"u
!x f = "Ff"1 Fs
f!xs +G f!u( )36
Substitute quasi-steady !!xfast in differential equation for !!xslow
!!xs = "Ffs Ff
"1 Fsf!xs +G f!u( )#$ %& + Fs!xs +Gs!u
= Fs " FfsFf
"1Fsf#$ %&!xs + Gs " Ff
sFf"1"1G f#$ %&!u
Residualized differential equation for !!xslow
!!xs = F 's !xs +G 's !u
F 's = Fs ! FfsFf
!1Fsf"# $%
G 's = Gs ! FfsFf
!1G f"# $%
where
Adjust Slow-Mode Equation for Fast-Mode Steady State
37
Model of the Residualized Roll-Spiral Mode
Residualized roll/spiral equation
!!p! !"
#
$%%
&
'(("
Lp )Np Lr
Y*
VN+ L*
+,-
./0
N* + Nr
Y*
VN+,-
./0
#
$
%%%%
&
'
((((
gVN
LrN* ) L*Nr( )N* + Nr
Y*
VN+,-
./0
#
$
%%%%
&
'
((((
1 0
#
$
%%%%%%
&
'
((((((
!p!"
#
$%%
&
'((+#
=f11 f121 0
#
$%%
&
'((
!p!"
#
$%%
&
'((+#
38
Yawing motion is assumed to be instantaneous compared to rolling motions
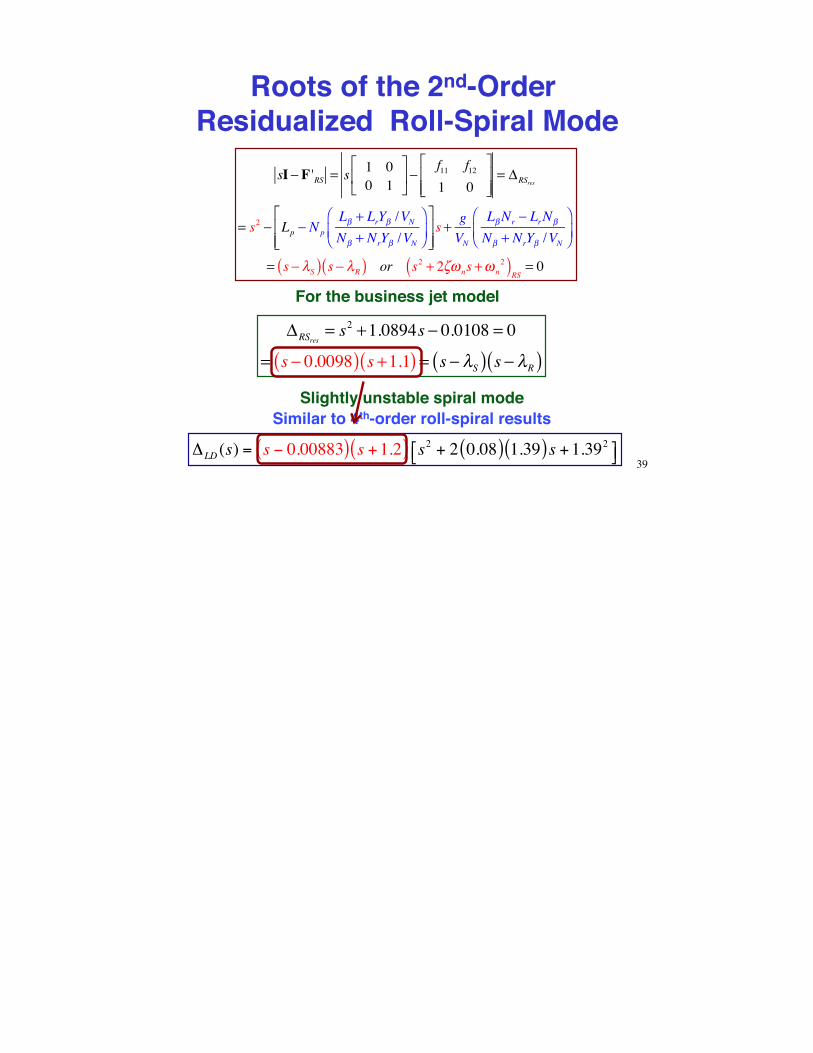
Roots of the 2nd-Order Residualized Roll-Spiral Mode
sI! F 'RS = s 1 00 1
"
#$
%
&' !
f11 f121 0
"
#$$
%
&''= (RSres
= s2 ! Lp ! Np
L) + LrY) /VNN) + NrY) /VN
*
+,-
./"
#$$
%
&''s + g
VN
L)Nr ! LrN)
N) + NrY) /VN
*
+,-
./
= s ! 0S( ) s ! 0R( ) or s2 + 212 ns +2 n2( )RS = 0
For the business jet model
!RSres= s2 +1.0894s " 0.0108 = 0
= s " 0.0098( ) s +1.1( ) = s " #S( ) s " #R( )Slightly unstable spiral mode
Similar to 4th-order roll-spiral results
!LD (s) = s " 0.00883( ) s +1.2( ) s2 + 2 0.08( ) 1.39( )s +1.392#$ %& 39