Embed Size (px)
Citation preview

Advanced Course in
Theoretical Glaciology
Ralf Greve
Institute of Low Temperature Science
Hokkaido University
Lecture Notes
Sapporo 2019

These lecture notes are largely based on the textbook
• Greve, R. and H. Blatter. 2009. Dynamics of Ice Sheets and Glaciers.Springer, Berlin, Germany etc. ISBN 978-3-642-03414-5.
Further recommended textbooks are:
• Cuffey, K. M. and W. S. B. Paterson 2010. The Physics of Glaciers.Elsevier, Amsterdam, The Netherlands etc., 4th edition.
• Hooke, R. LeB. 2005. Principles of Glacier Mechanics. Cambridge Uni-versity Press, Cambridge, UK and New York, NY, USA, 2nd edition.
• Van der Veen, C. J. 2013. Fundamentals of Glacier Dynamics. CRCPress, Boca Raton, FL, USA etc., 2nd edition.
Copyright 2019 Ralf Greve

Contents
1 Introduction 1
2 Elements of Continuum Mechanics 42.1 Position Vector, Velocity and Acceleration . . . . . . . . . . . . . . . . . . 42.2 Time Derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4 Strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5 Balance Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5.1 Mass Balance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5.2 Momentum Balance . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5.3 Energy Balance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.5.4 List of Balance Equations . . . . . . . . . . . . . . . . . . . . . . . 19
2.6 Constitutive Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.1 General Considerations . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.2 Incompressible Materials . . . . . . . . . . . . . . . . . . . . . . . . 202.6.3 Example: Incompressible Newtonian Fluid . . . . . . . . . . . . . . 21
3 Constitutive Equations for Polycrystalline Ice 253.1 Microstructure of Ice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Creep of Polycrystalline Ice . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Flow Relation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.1 Glen’s Flow Law . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.3.2 Inverse Form of Glen’s Flow Law . . . . . . . . . . . . . . . . . . . 313.3.3 Flow Enhancement Factor . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Heat Flux and Internal Energy . . . . . . . . . . . . . . . . . . . . . . . . 33
4 Large-Scale Dynamics of Ice Sheets 354.1 Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2 Full Stokes Flow Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2.1 Field Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.2 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.2.2.1 Free Surface . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2.2.2 Ice Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.2.2.3 Grounded Ice Front . . . . . . . . . . . . . . . . . . . . . 45
4.2.3 Ice Thickness Equation . . . . . . . . . . . . . . . . . . . . . . . . . 474.2.4 Initial Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
I

Contents
4.3 Hydrostatic Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . 494.4 First Order Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.5 Shallow Ice Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.6 Driving Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.7 Analytical Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.7.1 Simplified Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.7.2 Vialov Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 Dynamics of Glacier Flow 665.1 Glaciers Versus Ice Sheets . . . . . . . . . . . . . . . . . . . . . . . . . . . 665.2 Parallel Sided Slab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6 Large-Scale Dynamics of Ice Shelves 736.1 Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 736.2 Full Stokes Flow Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.2.1 Field Equations, Boundary Conditions at the Free Surface . . . . . 736.2.2 Boundary Conditions at the Ice Base . . . . . . . . . . . . . . . . . 746.2.3 Boundary Conditions at the Grounding Line and Calving Front . . 75
6.3 Hydrostatic Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . 766.4 Shallow Shelf Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . 766.5 Ice Shelf Ramp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7 Glacial Isostasy 897.1 Structure of the Earth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 897.2 Simple Isostasy Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7.2.1 LLRA Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 907.2.2 ELRA Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
References 95
II

1 IntroductionGeneral Definitions
Vertical exaggeration factor ~200…500
Ice sheetsgrounded ice
masses ofcontinental size,area > 50,000 km2
(Antarctica,Greenland).
Ice shelves floating ice masses,
connected to an icesheet (Antarctica).
1a
General Definitions
Glacierssmall grounded ice
masses in mountainousregions, constrained bytopographical features.
Ice capsextended grounded ice masses, area < 50,000 km2
(Austfonna, Vatnajökull, North/South Patagonian Icefields...).
Credit: Christoph Mayer
Remark: “Glacier” is sometimes also used as an umbrella term for all grounded ice bodies (ice sheets, ice caps and glaciers as defined above).
1b

Ice Sheets
Antarctic ice sheet (with ice shelves)
Greenland ice sheet
2a
Glaciers and Ice Caps
• Can be found on every continent(polar/subpolar areas, mountains).
• Number: ~ 200,000 (~ 70 ice caps).
• Many different types:Valley glaciers, cirque glaciers,hanging glaciers, tidewater glaciers,rock glaciers…
Photo credit: www.glaciers-online.net
2b

Ice Inventory
Main source: Vaughan et al. (2013) [IPCC AR5 Ch. 4].(*) Sum for all glaciers and ice caps. (**) Range of values for individual glaciers and ice caps.
Glaciers andice caps
Greenlandice sheet
Antarcticice sheet
Area (106 km2) 0.73* 1.80 12.3
Volume (metres of sea level equivalent)
0.41* 7.36 58.3
Turnover time(vol/accum, years)
~ 50 – 1000** ~ 5000 ~ 12000
3a
Why does ice flow?
3b
Two mechanisms:
Internaldeformation(ice = viscous
fluid).
Basal sliding.

2 Elements of Continuum Mechanics
Continuum mechanics is concerned with the motion and deformation of continuous bodies.The two main types of such bodies are solids (e.g., steel) and fluids (e.g., water or air).Since we will focus on the fluid-type motion of polycrystalline ice in ice sheets and glaciers,we will mainly cover the concepts related to fluids.
2.1 Position Vector, Velocity and Acceleration
A body consists of an infinite number of points, also called particles. For any time t, eachpoint P of the body is identified by its position vector x relative to a prescribed origin O(Fig. 2.1).
x
x
y
z
P
O
Body
Figure 2.1: Body and position vector x.
Like any vector, the position vector x can be represented by its components in a Carte-sian coordinate system (x, y, z):
x =
xyz
=
x1
x2
x3
. (2.1)
We will mainly use the (x, y, z) notation. However, for some calculations, the more sys-tematic index notation (x1, x2, x3) will be more convenient.
4

2 Elements of Continuum Mechanics
The velocity v is defined as the change of the position vector with time. Mathematically,this is described by the first time derivative,
v =dx
dt. (2.2)
Of course, the velocity in a moving body like a glacier depends in general on position andtime:
v = v(x, t) . (2.3)
Such physical quantities are called fields. We will therefore speak of the velocity field. Asshown in Fig. 2.2, the velocity vector of a particle P is always tangential to its trajectory(path).
x
v
x
y
z
Trajectory of P
P
Figure 2.2: Velocity vector v of a particle P .
The acceleration a is defined as the change of the velocity with time:
a =dv
dt=
d2x
dt2. (2.4)
Like the velocity, it depends in general on position and time,
a = a(x, t) . (2.5)
Thus, it is also a field quantity (“acceleration field”).
2.2 Time Derivatives
An important point to note is that the time derivative in Eqs. (2.2) and (2.4) follows themotion of the particles. We will call this the material time derivative.
A second type of time derivative is the local time derivative. It describes the change ofa field quantity ψ(x, t) for a fixed position x in space:
∂ψ
∂t=∂ψ(x, t)
∂t. (2.6)
5

2 Elements of Continuum Mechanics
Mathematically, this is the partial derivative of the function (field) ψ(x, t) with respect totime t.
As an example, let us consider the temperature field T (x, t) of a glacier. The materialtime derivative dT/dt describes the temperature change of the ice particles along theirmotion. In contrast, the local time derivative ∂T/∂t is the temperature change observedat a fixed position in space that may be defined relative to the surrounding bedrock. Atdifferent times, this point in space will be occupied by different ice particles that movealong their trajectories. It should thus be clear that the two time derivatives are reallydifferent things.
However, a relation between the material and local time derivative can be established.For an arbitrary field ψ(x, t), we find by applying the chain rule for differentiation:
dψ
dt=
d
dtψ(x, t)
=d
dtψ(x, y, z, t)
=∂ψ
∂x
dx
dt+∂ψ
∂y
dy
dt+∂ψ
∂z
dz
dt+∂ψ
∂t. (2.7)
The first three summands contain the components of the gradient of ψ,
gradψ =
∂ψ
∂x∂ψ
∂y∂ψ
∂z
, (2.8)
and the components of the velocity v,
v =
vxvyvz
=
dx
dtdy
dtdz
dt
. (2.9)
Thus, Eq. (2.7) can be written as
dψ
dt=∂ψ
∂t+ (gradψ)x vx + (gradψ)y vy + (gradψ)z vz . (2.10)
The last three summands constitute the dot product of the vectors gradψ and v. Therefore,we obtain the result
dψ
dt=∂ψ
∂t+ (gradψ) · v . (2.11)
The term (gradψ) · v, which arises from the transport of the field ψ in the flow, is calledthe convective derivative.
6

2 Elements of Continuum Mechanics
2.3 Stress
Stress is defined as force per area. More precisely, as illustrated in Fig. 2.3, the stressvector tn acting on a small area ∆A within (or at the surface of) a body is defined as
tn =∆F
∆A, (2.12)
where ∆F is the force acting on this area.
n
ΔA
t = DF/DAn
Figure 2.3: Stress vector tn acting on the small area ∆A with unit normal vector n.
The component of tn perpendicular to the area ∆A (in other words, along its unit normalvector n) is called normal stress. If the normal stress is positive, it pulls on the area ∆Ain the direction of n and is called tensile stress. If it is negative, it pushes on the area ∆Aagainst the direction of n and is called compressive stress. The in-plane component of tn(perpendicular to the unit normal vector n) is called shear stress.
Let us now consider a small cube within a body. As shown in Fig. 2.4, this cube issupposed to be aligned with the coordinate axes x, y, z. On each of its six faces, a stressvector acts that can be decomposed into a normal stress and a shear stress. Each of theshear stresses can further be decomposed into the two directions within the respective face.For instance, the top face has a unit normal vector in positive z direction. The normalstress acting on this face is called tzz, and the two components of the shear stress are calledtxz and tyz, respectively.
All stresses shown in Fig. 2.4 can be put together into a tensor, which is called theCauchy stress tensor t. It reads
t =
txx txy txztyx tyy tyztzx tzy tzz
. (2.13)
Of course, this tensor can assume different values at different positions in the body anddifferent times. Thus, it is also a field quantity,
t = t(x, t) . (2.14)
7

2 Elements of Continuum Mechanics
t yy
t zy
t zz
t xzt yz
t xxt yx
t zx
t zx
t yx
t xx
t yz
t xz
t zy
t yy
t xy
t zz
t xy
xy
z
Figure 2.4: Components of the Cauchy stress tensor. All indicated directions correspondto positive stresses.
Without proof (see, e.g., Greve and Blatter (2009)), we note that the Cauchy stresstensor t allows computing the stress vector tn acting on any arbitrarily oriented area. Therelation is simply
tn(x, t) = t(x, t) · n . (2.15)
The right-hand side is a matrix-vector product. In components, and with the arguments(x, t) dropped, this equation reads (tn)x
(tn)y(tn)z
=
txxnx + txyny + txznztyxnx + tyyny + tyznztzxnx + tzyny + tzznz
. (2.16)
The Cauchy stress tensor is symmetric:
txy = tyx , txz = tzx , tyz = tzy . (2.17)
This can be expressed equivalently by stating that the matrix t is equal to its transposedtT,
t = tT . (2.18)
The reason for the symmetry is conservation of angular momentum. For instance, assumethat the shear stress tyz were larger than the complementary shear stress tzy. It becomesclear from Fig. 2.4 that tyz > tzy would result in a torque that would start rotating thecube in clockwise direction around the x-axis. However, this is physically not acceptablebecause it would mean to produce angular momentum without any external source. Inother words, angular momentum would not be conserved any more. Hence, in order to
8

2 Elements of Continuum Mechanics
enforce conservation of angular momentum, tyz = tzy must hold. The argumentation isanalogous for the pairs (txy, tyx) and (txz, tzx).
A particular form of stress is pressure. Pressure means a compressive stress p actinguniformly in all directions. If pressure is the only acting stress, the stress tensor t reads
t =
−p 0 00 −p 00 0 −p
. (2.19)
By introducing the unit tensor I as
I =
1 0 00 1 00 0 1
, (2.20)
we can write Eq. (2.19) in compact form as
t = −p I . (2.21)
As usual, the pressure p can vary in space and time, so that it is a scalar field quantity:
p = p(x, t) . (2.22)
A state of stress as described by Eqs. (2.19) or (2.21), and illustrated in Fig. 2.5, is realisedapproximately in ideal (non-viscous) fluids like water or air.
p
Figure 2.5: Uniform pressure p acting on a small sphere.
2.4 Strain
In the beginning of Section 2, we already said that we will be concerned with the defor-mation of continuous bodies (e.g., glaciers). This is described quantitatively by strain.
9

2 Elements of Continuum Mechanics
σσ
L ΔL
Figure 2.6: Elastic tension rod under normal stress σ. L is the length of the rod and ∆Lthe length change.
Consider an elastic tension rod of initial length L that is subjected to a normal stress σ,as shown in Fig. 2.6. The rod will experience a lengthening by the amount ∆L, and thestretching is defined by the ratio of the length change and the length itself,
ε =∆L
L. (2.23)
γ
τ
τ
Figure 2.7: Shear experiment for a small, elastic cube. τ is the applied shear stress and γthe shear.
Next, consider a small, elastic cube that is subjected to a shear stress τ , as sketched inFig. 2.7. The result of the applied shear stress is that the initially right angles betweenthe sides of the cube will be deformed slightly. The amount of deformation is called theshear γ (Fig. 2.7).
For fluids, the more important quantities are the strain rates, that is, the change ofstrain with time. Let us assume that stretching according to Eq. (2.23) takes place duringthe small time interval ∆t. The stretching rate ε is then defined as
ε =ε
∆t=
∆L
L∆t∆t→0
=1
L
dL
dt. (2.24)
Similarly, if we assume that a shear deformation produces the shear ∆γ during the time∆t, the shear rate γ is
γ =∆γ
∆t∆t→0
=dγ
dt. (2.25)
10

2 Elements of Continuum Mechanics
We now define the strain-rate tensor D by its components Dij,
Dij =1
2
(∂vi∂xj
+∂vj∂xi
)(i, j = 1, 2, 3 = x, y, z) . (2.26)
Thus, the matrix of the strain-rate tensor is
D =
∂vx∂x
1
2
(∂vx∂y
+∂vy∂x
)1
2
(∂vx∂z
+∂vz∂x
)1
2
(∂vx∂y
+∂vy∂x
)∂vy∂y
1
2
(∂vy∂z
+∂vz∂y
)1
2
(∂vx∂z
+∂vz∂x
)1
2
(∂vy∂z
+∂vz∂y
)∂vz∂z
. (2.27)
The strain-rate tensor is evidently symmetric:
Dxy = Dyx , Dxz = Dzx , Dyz = Dzy , (2.28)
or, equivalently,D = DT . (2.29)
Lxx
v (x)x Δvx
ΔLx
Figure 2.8: Stretching of a fluid in a velocity field vx(x).
In order to understand how this tensor is related to the stretching and shear ratesintroduced above (Eqs. (2.24) and (2.25)), let us first consider stretching of a fluid in avelocity field vx(x), as sketched in Fig. 2.8. The length change in x-direction during thesmall time interval ∆t is given by
∆Lx = ∆vx∆t . (2.30)
Provided that Lx is small, we can express the velocity difference ∆vx by the first-orderTaylor expansion
∆vx =∂vx∂x
Lx . (2.31)
11

2 Elements of Continuum Mechanics
Thus,
∆Lx =∂vx∂x
Lx∆t ⇒ ∂vx∂x
=∆LxLx∆t
. (2.32)
According to Eq. (2.27), the left-hand side is equal to Dxx. By taking the limit ∆t → 0,the right-hand side yields the stretching rate in x-direction, εx (see Eq. (2.24)). Hence, weobtain the result
Dxx = εx . (2.33)
Δγxy
x
y
Δux
Δy
Δvx
v (y)x
Figure 2.9: Shear of a fluid in a velocity field vx(y).
Next, consider shear of a fluid in a velocity field vx(y) (Fig. 2.9). The displacement ∆uxduring the small time interval ∆t is given by
∆ux = ∆vx∆t =∂vx∂y
∆y∆t (2.34)
(for the second step, first-order Taylor expansion has again been used). With the trigono-metric relation tan(∆γxy) = ∆ux/∆y, this yields
∂vx∂y
=tan(∆γxy)
∆t. (2.35)
By taking the limit ∆t → 0, ∆γxy will be small, so that tan(∆γxy) = ∆γxy holds. Usingthis and Eq. (2.25), the right-hand side yields the shear rate γxy:
∂vx∂y
= γxy . (2.36)
A velocity gradient ∂vy/∂x 6= 0 contributes equally to the shear rate γxy. Thus, for thegeneral case with both ∂vx/∂y 6= 0 and ∂vy/∂x 6= 0, we obtain
∂vx∂y
+∂vy∂x
= γxy . (2.37)
12

2 Elements of Continuum Mechanics
According to Eq. (2.27), the left-hand side is equal to 2Dxy, so that
Dxy =γxy2. (2.38)
Analogous argumentations hold for the other directions. Therefore, we conclude thatthe diagonal elements of the strain-rate tensor D are equal to the stretching rates alongthe coordinate axes,
Dxx = εx , Dyy = εy , Dzz = εz , (2.39)
and the off-diagonal elements are equal to one half of the respective shear rates,
Dxy =γxy2, Dxz =
γxz2, Dyz =
γyz2. (2.40)
2.5 Balance Equations
We will now derive the balance equations for mass, momentum and energy. These arefundamental, partial differential equations equations that will tell us how the fields ofmass density, velocity and temperature evolve over time.
2.5.1 Mass Balance
For a small volume ∆V with mass ∆M , the mass density is defined as
ρ =∆M
∆V. (2.41)
Within a body, the mass density can vary with space and time, so that it is a scalar fieldquantity:
ρ = ρ(x, t) . (2.42)
The mass flux describes the transport of mass per area and time in a given flow field:
j = ρv . (2.43)
Let us now consider a small cuboid with edge lengths ∆x, ∆y, ∆z, volume ∆V =∆x∆y∆z and mass ∆M . The cuboid is supposed to be fixed in space, that is, it does notmove with the flow. If we assume for the moment that the mass flux is only in x-direction(Fig. 2.10), then the change of the mass ∆M with time is given by
d(∆M)
dt= −
(jx(x+ ∆x) ∆y∆z − jx(x) ∆y∆z
). (2.44)
If the cuboid is sufficiently small, we can evaluate the term jx(x+∆x) by first-order Taylorexpansion. This yields
d(∆M)
dt= −
((jx(x) +
∂jx∂x
∆x)
∆y∆z − jx(x) ∆y∆z
)
= −∂jx∂x
∆x∆y∆z = −∂jx∂x
∆V . (2.45)
13

2 Elements of Continuum Mechanics
xz
y
j (x)x j (x + Δx)x
Δx
Δy
Figure 2.10: Mass fluxes (only in x-direction) through a small cuboid with edge lengths∆x, ∆y and ∆z (z-direction pointing out of the plane, not shown).
Using the definition of the mass density (Eq. (2.41)) and the fact that ∆V is constant, theleft-hand side can be written as
d(∆M)
dt=
d(ρ∆V )
dt=∂ρ
∂t∆V . (2.46)
The reason why in the last term the local time derivative appears is that the small cuboid isfixed in space, so that the derivative must be taken for a fixed position vector x. CombiningEqs. (2.45) and (2.46) yields
∂ρ
∂t= −∂jx
∂x. (2.47)
In general, the mass flux is three-dimensional. Then we get additional contributionsfrom the y- and z-directions:
∂ρ
∂t= −
(∂jx∂x
+∂jy∂y
+∂jz∂z
). (2.48)
Apart from the minus sign, the right-hand side is the divergence of the mass flux,
div j =∂jx∂x
+∂jy∂y
+∂jz∂z
, (2.49)
so that we obtain∂ρ
∂t+ div j = 0 . (2.50)
Inserting the definition of the mass flux (2.43) yields
∂ρ
∂t+ div (ρv) = 0 . (2.51)
This is the mass balance, also known as the continuity equation.An important special case is that of an incompressible material, defined by a constant
density (ρ = const). For this case, Eq. (2.51) simplifies to
divv = 0 , (2.52)
which is the mass balance or continuity equation for incompressible materials. It statesthat the divergence of velocity field is zero everywhere.
14

2 Elements of Continuum Mechanics
2.5.2 Momentum Balance
Newton’s Second Law says that mass times acceleration is equal to the sum of all forces.For a continuum-mechanical version of Newton’s Second Law, we must formulate it for eachsmall volume ∆V of the body in question. Since mass per volume is density (Eq. (2.41)),it reads schematically
ρdv
dt= Sum of all forces per volume . (2.53)
Two different types of forces contribute to the right-hand side. The first is the “direct”volume force
f =∆F
∆V, (2.54)
where ∆F is the force that acts on the volume element ∆V within the body. The mostimportant example is the volume force fg due to an external gravity field with gravitationalacceleration g, for which
fg =∆mg
∆V= ρg (2.55)
holds.
xz
y
t (x)xx
t (y)xy
t (y + Δy)xy
t (x + Δx)xx
Δx
Δy
Figure 2.11: Stresses txx and txy acting on a small cuboid with edge lengths ∆x, ∆y and∆z (z-direction pointing out of the plane, not shown).
The second contribution is due to the stresses that act on the surface of the volumeelement. Let us consider the simplified situation shown in Fig. 2.11, in which only thenormal stress txx and shear stress txy act on a small cuboid. The resulting x-component(∆Ft)x of the force ∆Ft due to the stresses is
(∆Ft)x =(txx(x+ ∆x) ∆y∆z − txx(x) ∆y∆z
)+(txy(y + ∆y) ∆x∆z − txy(y) ∆x∆z
). (2.56)
Evaluating the terms txx(x+ ∆x) and txy(y + ∆y) by first-order Taylor expansion yields
(∆Ft)x =
((txx(x) +
∂txx∂x
∆x)
∆y∆z − txx(x) ∆y∆z
)
15

2 Elements of Continuum Mechanics
+
((txy(y) +
∂txy∂y
∆y)
∆x∆z − txy(y) ∆x∆z
)
=
(∂txx∂x
+∂txy∂y
)∆x∆y∆z =
(∂txx∂x
+∂txy∂y
)∆V . (2.57)
In general, there will be an additional contribution from the shear stress txz:
(∆Ft)x =
(∂txx∂x
+∂txy∂y
+∂txz∂z
)∆V . (2.58)
Analogous expressions arise for the y- and z-components of the force ∆Ft. The resultingforce per volume, ft, is therefore
ft =
∂txx∂x
+∂txy∂y
+∂txz∂z
∂tyx∂x
+∂tyy∂y
+∂tyz∂z
∂tzx∂x
+∂tzy∂y
+∂tzz∂z
= div t . (2.59)
Inserting Eqs. (2.54) and (2.59) into Eq. (2.53) yields
ρdv
dt= div t + f . (2.60)
This is the continuum-mechanical version of Newton’s Second Law, also known as themomentum balance.
2.5.3 Energy Balance
We now turn to the internal energy U , which is a measure for the heat content of a body.The density of internal energy is the internal energy per volume,
ρu =∆U
∆V. (2.61)
Further, we introduce the internal energy flux qu, which is the transport of internal energyper area and time. It has two components. One is the heat flux q, through which heatflows from hot to cold. The second is the advective component ρuv, which, like the massflux (2.43), describes the transport of internal energy due to the flow field v. The internalenergy flux is therefore
qu = q + ρuv . (2.62)
With the same arguments we used in Section 2.5.1 in order to derive the continuityequation for mass in the form (2.50), we can formulate a continuity equation for internalenergy:
∂ρu∂t
+ divqu = s . (2.63)
16

2 Elements of Continuum Mechanics
The only difference is the additional source term s, which decribes the generation of internalenergy per volume and time, for instance, due to radiation or internal friction.
Next, we introduce the specific internal energy u, which is the internal energy per mass,
u =∆U
∆M. (2.64)
Using Eqs. (2.41) and (2.61) provides the relation
ρu =∆U
∆V=
∆U
∆M
∆M
∆V= ρu . (2.65)
Inserting this result and Eq. (2.62) in the continuity equation (2.63) yields
∂(ρu)
∂t+ div (ρuv) + divq = s . (2.66)
By using the product rule for differentiation and the definition (2.43) of the mass flux j,the first two terms can be evaluated as follows:
∂(ρu)
∂t= ρ
∂u
∂t+ u
∂ρ
∂t, (2.67)
and
div (ρuv) = div (uj) =∂(ujx)
∂x+∂(ujy)
∂y+∂(ujz)
∂z
= u∂jx∂x
+∂u
∂xjx + u
∂jy∂y
+∂u
∂yjy + u
∂jz∂z
+∂u
∂zjz
= u
(∂jx∂x
+∂jy∂y
+∂jz∂z
)+∂u
∂xjx +
∂u
∂yjy +
∂u
∂zjz
= u div j + (gradu) · j= u div (ρv) + (gradu) · (ρv)
= u div (ρv) + ρ (gradu) · v . (2.68)
By inserting Eqs. (2.67) and (2.68) in Eq. (2.66) and collecting terms, we obtain
ρ
{∂u
∂t+ (gradu) · v
}+ u
{∂ρ
∂t+ div (ρv)
}= −divq + s . (2.69)
Due to Eq. (2.11), the first term in curly brackets is equal to the material time derivativedu/dt. The second term in curly brackets is equal to the mass balance (2.51) and thusvanishes. Therefore, Eq. (2.69) simplifies to
ρdu
dt= −divq + s . (2.70)
17

2 Elements of Continuum Mechanics
The source term s remains to be discussed. One contribution is heat supply due toradiation, for instance generated by absorption of solar radiation, or by decay of radioactiveisotopes incorporated in the body. The former process is relevant in the uppermost fewcentimetres of a glacier, the latter process in the Earth’s crust. If we denote the specificradiation power (energy per mass and time) by r, then ρr is the contribution to s (energyper volume and time).
Δγxy
x
yΔy
Δx
Δvx
v (y)x
Δux
ztxy
txy
Figure 2.12: Strain heating for a fluid that undergoes simple shear in the x-y plane. Thez-direction points out of the plane (not shown).
The second contribution is the production of heat due to the work done by internalstresses. This is called strain heating. For the simplified situation of Fig. 2.12 (only simpleshear deformation), we obtain
Φ =work
volume× time=
force× distance
volume× time
=txy∆x∆z ×∆ux∆x∆y∆z ×∆t
=txy∆ux∆y∆t
. (2.71)
Inserting Eq. (2.34) and then using Eq. (2.27) (with ∂vx/∂y 6= 0 and ∂vy/∂x = 0, thusDxy = 1
2(∂vx/∂y)) yields
Φ = txy∂vx∂y
= 2txyDxy . (2.72)
Without proof (see, e.g., Greve and Blatter (2009)), we note that, in the general case,similar expressions arise from all other stress components, so that the strain heating reads:
Φ = txxDxx + tyyDyy + tzzDzz + 2txyDxy + 2txzDxz + 2tyzDyz
= txxDxx + txyDyx + txzDzx + tyyDyy + tyxDxy + tyzDzy
+ tzzDzz + tzxDxz + tzyDyz
= (t · D)xx + (t · D)yy + (t · D)zz
= tr (t · D) . (2.73)
18

2 Elements of Continuum Mechanics
In the second step, the symmetry of t and D has been used. As for the last line, note thatthe trace (tr) of a tensor is equal to the sum of its diagonal elements.
With the strain heating (2.73) and the heat supply due to radiation ρr discussed above,the source term s becomes
s = tr (t · D) + ρr . (2.74)
Inserting this result in Eq. (2.70) yields
ρdu
dt= −divq + tr (t · D) + ρr . (2.75)
This is the energy balance.
2.5.4 List of Balance Equations
For the sake of overview, here we list again the balance equations for mass (Eqs. (2.51),(2.52)), momentum (Eq. (2.60)) and energy (Eq. (2.75)) derived above.
Mass balance (general case):∂ρ
∂t+ div (ρv) = 0 . (2.76)
Mass balance (incompressible material):
divv = 0 . (2.77)
Momentum balance:
ρdv
dt= div t + f . (2.78)
Energy balance:
ρdu
dt= −divq + tr (t · D) + ρr . (2.79)
2.6 Constitutive Equations
2.6.1 General Considerations
The balance equations (2.76), (2.78) and (2.79) are evolution equations for the unknownfields ρ, v and u. A further unknown field is the temperature T , which does not appearexplicitly in the balance equations, but it is hidden in the internal energy u.
On the right-hand sides, the fields t and q are also unknown. The strain-rate tensor Dis unknown as well, but it is fully determined by the velocity field v (Eq. (2.26)) and thusnot counted separately. The source terms f and r are assumed to be prescribed as externalforcings.
Thus, in component form we have 1+3+1 = 5 equations (mass balance: scalar equation,momentum balance: vector equation, energy balance: scalar equation) for the 1+3+1+1+
19

2 Elements of Continuum Mechanics
6+3 = 15 unknown fields ρ (scalar), v (vector), u (scalar), T (scalar), t (symmetric tensor),and q (vector). The system is highly under-determined. Therefore, additional closurerelations between the field quantities are required. These closure relations describe thespecific behaviour of the different materials (whereas the balance equations are universallyvalid), and they are called constitutive equations.
We will not discuss the general theory of constitutive equations (“material theory”) here[see, e.g., Liu (2002), Hutter and Johnk (2004)]. Rather, we confine ourselves to a specialclass of materials, the so-called thermoviscous fluids, that are relevant for our purpose ofdescribing ice-dynamic processes. A thermoviscous fluid is defined as a material with thefollowing constitutive equations:
t = t (D, T, gradT, ρ) ,
q = q (D, T, gradT, ρ) ,
u = u (D, T, gradT, ρ) .
(2.80)
These constitutive equations allow eliminating the fields t, q and u in the balance equations(2.76), (2.78) and (2.79). This produces 5 field equations for the 5 remaining unknownfields ρ, v and T . Hence, a closed system of equations emerges that can in principle besolved. For a unique solution, the field equations must be complemented by suitable initialand boundary conditions.
2.6.2 Incompressible Materials
The incompressible case requires special attention. For the mass balance, Eq. (2.77) is tobe used instead of Eq. (2.76). The density ρ is constant, so that it is not an unknown fieldany more. As for the stress tensor t, we define the negative average of the normal stressesas the pressure p,
p = −13
(txx + tyy + tzz) = −13
tr t , (2.81)
and split the stress tensor according to
t = −p I + tD . (2.82)
The newly introduced tensor tD is called the stress deviator. In components, Eq. (2.82)reads
txx = −p+ tDxx , tyy = −p+ tDyy , tzz = −p+ tDzz ,
txy = tDxy , txz = tDxz , tyz = tDyz .(2.83)
The point of the splitting (Eqs. (2.82), (2.83)) is that, due to the incompressibility, thepressure p does not contribute to the deformation of the body. Instead, it is an unknownfield, and thus replaces the density in the list of unknown fields. The constitutive equation(2.80)1 for the full stress tensor t is replaced by a new constitutive equation that onlydetermines the stress deviator tD. The set of constitutive equations for the incompressible
20

2 Elements of Continuum Mechanics
thermoviscous fluid thus reads
tD = tD (D, T, gradT, p) ,
q = q (D, T, gradT, p) ,
u = u (D, T, gradT, p) .
(2.84)
Inserting them in the balance equations (2.77), (2.78) and (2.79) produces 5 field equationsfor the 5 unknown fields p, v and T .
2.6.3 Example: Incompressible Newtonian Fluid
As an important example, let us consider the incompressible Newtonian fluid. Its consti-tutive equation for the stress deviator reads
tD = 2ηD , (2.85)
where the coefficient η is called the shear viscosity, or simply the viscosity. It is assumedto be a constant material parameter. The inverse of the viscosity is called fluidity ϕ,
ϕ =1
η. (2.86)
Since Eq. (2.85) does not depend on temperature, we can drop the thermodynamic partof the problem (energy balance (2.79), constitutive equations (2.84)2,3). This reduces theproblem to 4 equations for the 4 unknown fields p and v.
Inserting the decomposition (2.82) and the constitutive equation (2.85) in the momentumbalance (2.78) requires computing the divergence of the stress tensor,
div t = div (−p I + tD) = div (−p I) + div (2ηD) . (2.87)
Without proof (see, e.g., Greve and Blatter (2009)), we note that the result is
div t = −grad p+ η∆v , (2.88)
where the operator ∆ = div grad is the Laplacian. In components, the term ∆v reads
∆v =
∂2vx∂x2
+∂2vx∂y2
+∂2vx∂z2
∂2vy∂x2
+∂2vy∂y2
+∂2vy∂z2
∂2vz∂x2
+∂2vz∂y2
+∂2vz∂z2
. (2.89)
Insertion of (2.88) in the momentum balance (2.78) yields the famous Navier-Stokesequation
ρdv
dt= −grad p+ η∆v + f , (2.90)
which is the equation of motion for the incompressible Newtonian fluid. The full systemof field equations consists of this equation and the mass balance (2.77).
21

2 Elements of Continuum Mechanics
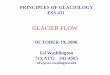
Gravity-Driven Thin Film Flow
An interesting application, which can already serve as a very simple model of a flowingglacier, is a thin film (thickness H) of an incompressible Newtonian fluid (density ρ, viscos-ity η). It flows flows down an impenetrable plane (inclination angle α) under the influenceof gravity (acceleration due to gravity g); see Fig. 2.13. The film is uniform and of infiniteextent in the x (downhill) and y (lateral) directions. At the contact between the fluid andthe underlying plane, no-slip conditions prevail, and the free surface is stress-free. Further,steady-state conditions are assumed.
z
xy
a
g
vx txz
H
Figure 2.13: Gravity-driven thin film flow of an incompressible Newtonian fluid.
This problem is a realisation of plane strain: due to the uniformity in the y (lateral)direction, the velocity component vy and the strain-rate components Dxy, Dyy and Dyz
vanish, and all field quantities are independent of y. Further, the uniformity in the x(downhill) direction and the steady-state assumption imply that dependencies on x andt will not occur either, so that only dependence on the vertical coordinate z remains.Moreover, due to the impenetrable basal plane, there will be no vertical velocity componentvz, and the only remaining velocity component is vx(z).
Taking into account f = ρg with gx = g sinα, gz = −g cosα, we note the x-componentof the Navier-Stokes equation (2.90),
ρdvxdt
= ρ
(∂vx∂t
+ vx∂vx∂x
+ vy∂vx∂y
+ vz∂vx∂z
)
= −∂p∂x
+ η
(∂2vx∂x2
+∂2vx∂y2
+∂2vx∂z2
)+ ρg sinα . (2.91)
Owing to the above arguments, all terms except the last two vanish, and the equationsimplifies to
η∂2vx∂z2
= −ρg sinα . (2.92)
22

2 Elements of Continuum Mechanics
This can readily be integrated,
η∂vx∂z
= C1 − ρgz sinα , (2.93)
where C1 is an integration constant. Its value can be determined by noting that, due tothe constitutive equation (2.85), the left-hand side is equal to the shear stress txz,
txz = η∂vx∂z
= C1 − ρgz sinα , (2.94)
which vanishes at the free surface (z = H) as a consequence of the stress-free boundarycondition. Thus,
txz|z=H = C1 − ρgH sinα = 0 ⇒ C1 = ρgH sinα , (2.95)
and we obtain for the shear stress the linear profile
txz = η∂vx∂z
= ρg(H − z) sinα . (2.96)
A further integration yields the velocity,
vx =ρg
η
(Hz − z2
2
)sinα + C2 , (2.97)
and the integration constant C2 is evidently equal to zero due to the no-slip conditionvx|z=0 = 0. Therefore, the solution for the downhill velocity is the parabolic profile
vx =ρgH sinα
η
(z − z2
2H
). (2.98)
The solutions (2.96) and (2.98) are also sketched in Fig. 2.13.Analogous to Eq. (2.91), the z-component of the Navier-Stokes equation (2.90) reads
ρdvzdt
= ρ
(∂vz∂t
+ vx∂vz∂x
+ vy∂vz∂y
+ vz∂vz∂z
)
= −∂p∂z
+ η
(∂2vz∂x2
+∂2vz∂y2
+∂2vz∂z2
)− ρg cosα , (2.99)
and simplifies for the thin film problem to
∂p
∂z= −ρg cosα . (2.100)
The integral of this equation is
p = C3 − ρgz cosα , (2.101)
23

2 Elements of Continuum Mechanics
and the integration constant C3 follows from the stress-free boundary condition at thesurface,
p|z=H = C3 − ρgH cosα = 0 ⇒ C3 = ρgH cosα . (2.102)
Thus, we obtainp = ρg(H − z) cosα , (2.103)
which is a hydrostatic pressure profile, that is, the pressure at any point in the thin filmequals the weight of the overburden fluid.
One possible realisation of gravity-driven thin film flow is an oil film (η ∼ 0.1 Pa s)thinner than one millimetre flowing down some substrate. However, in order to producea very simple model of a flowing glacier, we can also make the film H = 100 m thick andassume a viscosity as large as η = 1014 Pa s. According to Eq. (2.98) the surface velocityvs (at z = H) is
vs =ρgH2 sinα
2η. (2.104)
With the ice density ρ = 910 kg m−3, the gravitational acceleration g = 9.81 m s−2 and theyear-to-seconds conversion 1 a = 31556926 s, this yields vs = 14.09 m a−1 × sinα (e.g., forα = 10◦: vs = 2.45 m a−1).
However, for a realistic description of flowing glacier ice the incompressible Newtonianfluid is not sufficient. In the next chapter we will formulate more appropriate constitutiveequations for glacier ice.
24

3 Constitutive Equations forPolycrystalline Ice
3.1 Microstructure of Ice
The phase of H2O ice which exists at pressure and temperature conditions encounteredin ice sheets and glaciers is called ice Ih. It forms hexagonal crystals, that is, the watermolecules are arranged in layers of hexagonal rings (Fig. 3.1). The plane of such a layer iscalled the basal plane, which actually consists of two planes shifted slightly (by 0.0923 nm)against each other. The direction perpendicular to the basal planes is the optic axis orc-axis, and the distance between two adjacent basal planes is 0.276 nm.
c-axis
c-axis
0.4523 nm
0.4523 nm
0.0923 nm
0.276 nm
(a)
(b)
1
3
3
6
6
7
8
9
9
1
0
0
2
4
4
7
5
5
8
2
Figure 3.1: Structure of an ice crystal. The circles denote the oxygen atoms of the H2Omolecules. (a) Projection on the basal plane. (b) Projection on plane indicatedby the broken line in (a). Adapted from Paterson (1994), c© Elsevier.
Owing to this relatively large distance, the basal planes can glide on each other whena shear stress is applied, comparable to the deformation of a deck of cards. To a muchlesser extent, gliding is also possible in the prismatic and pyramidal planes (see Fig. 3.2).This means that the ice crystal responds to an applied shear stress with a continuousdeformation, which goes on as long as the stress is applied (creep, fluid-like behaviour) and
25

3 Constitutive Equations for Polycrystalline Ice
depends on the direction of the stress relative to the crystal planes (anisotropy).
c cc
Prismatic PyramidalBasal
Figure 3.2: Basal, prismatic and pyramidal glide planes in the hexagonal ice Ih crystal.Reproduced from Faria (2003), c© S. H. Faria.
Measurements have shown that ice crystals show some creep even for very low stresses.In a perfect crystal such a behaviour would not be expected. However, in real crystalsdislocations occur, which are defects in its structure. These imperfections make the crystalmuch more easily deformable, and this is enhanced even more by the fact that duringcreep additional dislocations are generated. This creep mechanism is consequently calleddislocation creep.
3.2 Creep of Polycrystalline Ice
Naturally, ice which occurs in ice sheets and glaciers does not consist of a single ice crystal.Rather, it is composed of a vast number of crystallites (also called grains), the typicalsize of which is of the order of millimetres to centimetres. Such a compound is calledpolycrystalline ice. An example is shown in Fig. 3.3.
1 cm
Figure 3.3: Thin-section of polycrystalline glacier ice regarded between crossed polarisationfilters. The crystallites (grains) are clearly visible, and their apparent coloursdepend on the c-axis orientation.
26

3 Constitutive Equations for Polycrystalline Ice
The c-axis orientations of the crystallites in polycrystalline ice differ from one another(Fig. 3.3). Under the assumption that the orientation distribution is at random, theanisotropy of the crystallites averages out in the compound, so that its macroscopic be-haviour will be isotropic. In other words, the material properties of polycrystalline ice donot show any directional dependence.
Let us assume to conduct a shear experiment with a small sample of polycrystalline iceas sketched in Fig. 3.4 (left panel). The shear stress τ is assumed to be held constant,and the shear γ is measured as a function of time. The resulting creep curve γ(t) is shownschematically in Fig. 3.4 (right panel). An initial, instantaneous elastic deformation ofthe polycrystalline aggregate is followed by a phase called primary creep during which theshear rate γ decreases continuously. This behaviour is related to the increasing geometricincompatibilities of the deforming crystallites with different orientations. After some time,a minimum shear rate is reached which remains constant subsequently, so that the shearincreases linearly with time. This phase is known as secondary creep. In the case ofrather high temperatures and/or high stresses, at a later stage dynamic recrystallisation(nucleation and growth of crystallites which are favourably oriented for deformation; alsoknown as migration recrystallisation) sets in, which leads to accelerated creep and finallya constant shear rate (linear increase of the shear with time) significantly larger than thatof the secondary creep. This is called tertiary creep.
Time, t
She
ar, g
elastic deformation
primary creep
secondary creep
tertiary creep
(accelerating)
γ
τ
τ
Figure 3.4: Shear experiment for a sample of polycrystalline ice. τ denotes the appliedshear stress, γ the shear and t the time.
Both the elastic deformation and primary creep are transient phenomena. We willignore them in the following and only be concerned with secondary and tertiary creep.The reference will be secondary creep of polycrystalline ice with a random orientation ofthe c-axes.
27

3 Constitutive Equations for Polycrystalline Ice
3.3 Flow Relation
3.3.1 Glen’s Flow Law
To a good approximation, polycrystalline ice is an incompressible material with a densityof ρ = 910 kg m−3. In order to describe the secondary creep of polycrystalline ice, we usethe framework of the incompressible thermoviscous fluid (Section 2.6.2).
The constitutive equation for the stress deviator (flow law) reads
tD = 2ηD , (3.1)
where η is the ice viscosity. The difference to the incompressible Newtonian fluid (Eq. (2.85))is that the viscosity is not constant. We rearrange Eq. (3.1) by solving for the strain-ratetensor D,
D =1
2ηtD =
ϕ
2tD , (3.2)
where
ϕ =1
η(3.3)
is the ice fluidity (compare Eq. (2.86)).The trace (sum of the diagonal elements) of tD and D is equal to zero. For tD, this
follows from the splitting (2.83):
txx + tyy + tzz = −3p+ tDxx + tDyy + tDzz , (3.4)
so that
tr tD = tDxx + tDyy + tDzz= 3p+ txx + tyy + tzz
(2.81)= 3× [−1
3(txx + tyy + tzz)] + txx + tyy + tzz
⇒ tr tD = 0 . (3.5)
For D, it is a consequence of the mass balance (2.77):
0 = divv =∂vx∂x
+∂vy∂y
+∂vz∂z
(2.27)= Dxx +Dyy +Dzz = trD
⇒ trD = 0 . (3.6)
The zz-components of the two tensors can therefore be expressed by the respective xx-and yy-components:
tDzz = −(tDxx + tDyy) , (3.7)
Dzz = −(Dxx +Dyy) . (3.8)
28

3 Constitutive Equations for Polycrystalline Ice
Consequently, the flow laws (3.1) and (3.2) contain only five independent components.Numerous laboratory experiments and field measurements, plus some theoretical con-
siderations, have shown that the ice fluidity (3.3) can be expressed as follows:
ϕ = ϕ(T ′, σe) = 2A(T ′) f(σe) . (3.9)
The creep function f(σe) depends on the effective stress σe, and the rate factor A(T ′)depends on the temperature relative to the pressure melting point T ′. We will discuss themin the following.
Let us start with the creep function. It is usually expressed by a power law,
f(σe) = σn−1e , (3.10)
where n is the stress exponent. The best value for n has been a matter of continuousdebate, but most frequently n = 3 is used (Cuffey and Paterson 2010). The effective stressσe is given by
σe =√
12
tr (tD)2 , (3.11)
where (tD)2 = tD · tD (matrix multiplication). In components, Eq. (3.11) reads
σe =√
12
[(tDxx)2 + (tDyy)
2 + (tDzz)2 + 2t2xy + 2t2xz + 2t2yz] , (3.12)
where we have dropped the deviator symbol for the shear stresses (due to Eq. (2.83))and made use of the symmetry of t (Eq. (2.17)). Using Eq. (3.7) allows eliminating thecomponent tDzz:
σe =√
12
[(tDxx)2 + (tDyy)
2 + (tDxx + tDyy)2 + 2t2xy + 2t2xz + 2t2yz]
=√
(tDxx)2 + (tDyy)
2 + tDxxtDyy + t2xy + t2xz + t2yz . (3.13)
As for the rate factor, we follow Cuffey and Paterson (2010) and express it by an Ar-rhenius law :
A(T ′) = A? exp(−QR
[1
T ′− 1
T?
]), (3.14)
where A? is the pre-exponential constant, Q the activation energy, R = 8.314 J mol−1 K−1
the universal gas constant and T? = 263.15 K (= −10◦C) the transition temperature.The temperature relative to the pressure melting point T ′ remains to be defined. The
melting temperature of ice, Tm, is pressure-dependent. For low pressures (p > 100 kPa),Tm = T0 = 273.15 K, and for pressures which occur typically in ice sheets and glaciers(p > 50 MPa) the linear relation
Tm = T0 − β p (3.15)
holds. For pure ice, the Clausius-Clapeyron constant β has the value β = 7.42×10−8 K Pa−1,but under realistic conditions the value for air-saturated ice, β = 9.8 × 10−8 K Pa−1, is
29

3 Constitutive Equations for Polycrystalline Ice
preferable (Hooke 2005). Under hydrostatic conditions, this leads to a melting-point low-ering of 0.87 K per kilometre of ice thickness. With Eq. (3.15), T ′ is defined as
T ′ = T − Tm + T0 = T + β p , (3.16)
so that the pressure melting point always corresponds to T ′m = T0 = 273.15 K (= 0◦C).Recommended values for the pre-exponential constant A? and the activation energy Q
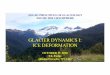
are listed in Table 3.1. The larger activation energy for T ′ > T? = 263.15 K is explainedby grain boundary sliding and the presence of liquid water at grain boundaries, whichcontribute to creep in this temperature range. The resulting rate factor is shown in Fig. 3.5.
Parameter Value
Stress exponent, n 3
Pre-exponential constant, A? 3.5× 10−25 s−1 Pa−3
Activation energy, Q 60 kJ mol−1 (for T ′ ≤ T?)115 kJ mol−1 (for T ′ > T?)
Table 3.1: Stress exponent and parameters for the Arrhenius law (3.14) (Cuffey and Pa-terson 2010).
-50 -40 -30 -20 -10 0Temperature T [°C]
10-27
10-26
10-25
10-24
10-23
Rat
e fa
ctor
A [s
-1 P
a-3]
Figure 3.5: Rate factor A(T ′) for the temperature range from −50◦C to 0◦C (relative tothe pressure melting point) according to the Arrhenius law (3.14). The kinkat −10◦C is due to the piecewise definition of the activation energy Q (seeTable 3.1).
Equation (3.2) together with (3.9), (3.10) and (3.14) reads
D = A(T ′)σn−1e tD , (3.17)
30

3 Constitutive Equations for Polycrystalline Ice
which is called Nye’s generalisation of Glen’s flow law, or Glen’s flow law for short (Glen1955, Nye 1957). Figure 3.6 shows the corresponding viscosity
η(T ′, σe) =1
ϕ(T ′, σe)=
1
2A(T ′)σn−1e
(3.18)
for different stresses and temperatures. Evidently, the viscosity of polycrystalline ice ismuch larger than that of viscous fluids of everyday life. For instance, the viscosity ofmotor oil is of the order of 0.1 Pa s, compared to ∼ 1013 Pa s for ice at T ′ = 0◦C andσe = 100 kPa (1 bar). On the other hand, the upper mantle of the Earth has a viscosity ofthe order of 1021 Pa s, which is further eight orders of magnitude stiffer, but still consideredto be a fluid on geological time-scales.
-20°C
-10°C0°C
0 20 40 60 80 100Effective stress
e [kPa]
1013
1014
1015
1016
1017
Vis
cosi
ty
[P
a s]
Figure 3.6: Viscosity (3.18) for a stress exponent n = 3, effective stresses up to 100 kPa(1 bar) and temperatures between −20◦C and 0◦C (relative to the pressuremelting point).
3.3.2 Inverse Form of Glen’s Flow Law
Glen’s flow law (3.17) expresses the strain rates as a function of the stresses. In order toderive the inverse form (stresses as a function of strain rates), we define the effective strainrate
de =√
12
trD2 (3.19)
(compare to the effective stress (3.11)). With the same arguments leading to (3.13), itscomponent form can be derived:
de =√D2xx +D2
yy +DxxDyy +D2xy +D2
xz +D2yz . (3.20)
31

3 Constitutive Equations for Polycrystalline Ice
By inserting (3.17) in (3.19), we obtain
de =
√12
tr[A2(T ′)σ
2(n−1)e (tD)2
]=
√12A2(T ′)σ
2(n−1)e tr (tD)2
= A(T ′)σn−1e
√12
tr (tD)2
= A(T ′)σn−1e σe = A(T ′)σne , (3.21)
so thatσe = A(T ′)−1/n d1/n
e . (3.22)
Solving (3.17) for tD and using (3.22) yields
tD = A(T ′)−1 σ−(n−1)e D
= A(T ′)−1A(T ′)(n−1)/n d−(n−1)/ne D
= A(T ′)−1/n d−(1−1/n)e D
⇒ tD = B(T ′) d−(1−1/n)e D , (3.23)
where the associated rate factor
B(T ′) = A(T ′)−1/n (3.24)
has been introduced. We may write this with the viscosity η(T ′, de) as
tD = 2η(T ′, de)D (3.25)
(see Eq. (3.1)), where
η(T ′, de) =1
2B(T ′) d−(1−1/n)
e . (3.26)
3.3.3 Flow Enhancement Factor
Glen’s flow law (3.17) is valid for secondary creep of isotropic, polycrystalline ice. However,as we have discussed in Sect. 3.2, in regions of flowing ice sheets and glaciers with relativelyhigh temperatures and/or stresses, tertiary creep may prevail, which goes along with theformation of an anisotropic fabric (non-uniform orientation distribution of the c-axes)favourable for the deformation regime at hand.
A crude, but very common way of including this effect in the flow law is by multiplyingthe isotropic ice fluidity for secondary creep by a flow enhancement factor E ≥ 1 (Hooke2005). This can be conveniently achieved by replacing the rate factor A(T ′) in Glen’s flowlaw (3.17) by EA(T ′):
A(T ′)→ EA(T ′) . (3.27)
32

3 Constitutive Equations for Polycrystalline Ice
Suggested values for the flow enhancement factor vary and depend on the deformationregime; however, in practice often an overall constant value somewhere between 1 and 10for the considered ice sheet or glacier is chosen (E = 1 corresponds to secondary creep).For the inverse form (3.23) of the flow law, the associated rate factor B(T ′) introduced in(3.24) changes to
B(T ′) = A(T ′)−1/n → [EA(T ′)]−1/n = EsB(T ′) , (3.28)
whereEs = E−1/n (3.29)
is the stress enhancement factor. For the sake of overview, we summarise the resultingflow laws:
Glen’s flow law:
D =ϕ(T ′, σe)
2tD , (3.30)
with the fluidityϕ(T ′, σe) = 2EA(T ′)σn−1
e , (3.31)
or combinedD = EA(T ′)σn−1
e tD . (3.32)
Inverse form of Glen’s flow law:
tD = 2η(T ′, de)D , (3.33)
with the viscosity
η(T ′, de) =1
2EsB(T ′) d−(1−1/n)
e , (3.34)
or combinedtD = EsB(T ′) d−(1−1/n)
e D . (3.35)
3.4 Heat Flux and Internal Energy
We will now formulate the thermodynamic constitutive equations (2.84)2,3 for polycrys-talline ice. The heat flux q can be described well by Fourier’s law of heat conduction,
q = −κ(T ) gradT , (3.36)
which states that heat flows from hot to cold areas. The heat conductivity κ is temperature-dependent:
κ(T ) = 9.828 e−0.0057T [K] W m−1K−1 (3.37)
(Ritz 1987). For T = T0 = 273.15 K this yields a value of 2.07 W m−1K−1, and it increaseswith decreasing temperature (Fig. 3.7, top panel).
33

3 Constitutive Equations for Polycrystalline Ice
-50 -40 -30 -20 -10 0Temperature T [°C]
2
2.2
2.4
2.6
2.8
[W m
-1 K
-1]
-50 -40 -30 -20 -10 0Temperature T [°C]
1700
1800
1900
2000
2100
c [J
kg-1
K-1
]
Figure 3.7: Heat conductivity κ and specific heat c for the temperature range from −50◦Cuntil 0◦C.
The specific internal energy u changes with temperature according to
du
dT= c(T ) , (3.38)
where c(T ) is the temperature-dependent specific heat. Integration from the referencetemperature T0 to any arbitrary temperature T yields the caloric equation of state (con-stitutive equation for the internal energy):
u =
T∫T0
c(T ) dT . (3.39)
The specific heat is given by
c(T ) = (146.3 + 7.253T [K]) J kg−1K−1 (3.40)
(Ritz 1987). According to this formula, at T = T0 = 273.15 K one obtains 2127.5 J kg−1K−1.In contrast to the heat conductivity, the specific heat decreases with decreasing tempera-ture (Fig. 3.7, bottom panel).
34

4 Large-Scale Dynamics of Ice Sheets
4.1 Geometry
Figure 4.1 shows the typical geometry (cross section) of a grounded ice sheet with attachedfloating ice shelf (the latter will be treated in Chap. 6), as well as its interactions with theatmosphere (snowfall, melting), the lithosphere (geothermal heat flux, isostasy) and theocean (melting, calving). Also, a Cartesian coordinate system is introduced, where x andy lie in the horizontal plane, and z is positive upward. The free surface (ice-atmosphereinterface) is given by the function z = h(x, y, t), the ice base by z = b(x, y, t) and thelithosphere surface by z = zl(x, y, t). Note that, for the grounded ice sheet, the ice baseand the lithosphere surface fall together (b = zl) and form the ice-lithosphere interface.
LithosphereOcean
Ice sheet
Atmosphere
Ice shelf
x
z
z = h(x, y, t)
z = b(x, y, t)
y
z = z (t)sl
z = z (x, y, t)l
Figure 4.1: Ice sheet geometry (with attached ice shelf) and Cartesian coordinate system. xand y span the horizontal plane, z is positive upward. z = h(x, y, t) denotes thefree surface, z = b(x, y, t) the ice base, z = zl(x, y, t) the lithosphere surface andz = zsl(t) the mean sea level. Interactions with the atmosphere, the lithosphereand the ocean are indicated. Vertical exaggeration factor ∼ 200-500.
By introducing the Cartesian coordinates x, y, z, we have tacitly assumed a flat Earth.For the vertical direction, this simplification is justified because the vertical extent of icesheets (as well as ice shelves and glaciers) is always much smaller than the mean radius of
35

4 Large-Scale Dynamics of Ice Sheets
j0
j0
P
P
st(P)
st(P)
N N
Re
Re
S S
Stereographicplane
Stereographicplane
(a) (b)
Figure 4.2: Polar stereographic projection for (a) the northern and (b) the southern hemi-sphere. The stereographic plane is parallel to the equatorial plane and definedby the standard parallel ϕ0 (often chosen as 71◦N or 71◦S). A point P on thesurface of the Earth is projected on the point st(P ) by intersecting the line PS(case a) or PN (case b) with the stereographic plane.
the Earth (Re = 6371 km), so that curvature effects are negligible. In the horizontal, theflattening can be achieved by a suitable map projection. For ice sheets, often the polarstereographic projection is used, which is illustrated in Fig. 4.2. It preserves angles, but notdistances and areas. The distortions are negligible for most practical applications, though.Even for the entire Antarctic Ice Sheet (situated between ∼ 63◦S and 90◦S), the distortionof the length scale nowhere exceeds 3% if the standard parallel is chosen as ϕ0 = 71◦S.
4.2 Full Stokes Flow Problem
4.2.1 Field Equations
By combining the balance equations listed in Sect. 2.5.4 with the constitutive equationsgiven in Sects. 3.3 and 3.4, we are now able to formulate the mechanical and thermody-namical field equations for the flow of ice in an ice sheet.
Since we describe polycrystalline ice as an incompressible material (Sect. 3.3.1), the massbalance (2.77) applies:
divv = 0 , (4.1)
or in component form∂vx∂x
+∂vy∂y
+∂vz∂z
= 0 . (4.2)
36

4 Large-Scale Dynamics of Ice Sheets
Next, let us recall the momentum balance (2.78):
ρdv
dt= div t + f , (4.3)
or in component form
ρdvxdt
=∂txx∂x
+∂txy∂y
+∂txz∂z
+ fx .
ρdvydt
=∂txy∂x
+∂tyy∂y
+∂tyz∂z
+ fy .
ρdvzdt
=∂txz∂x
+∂tyz∂y
+∂tzz∂z
+ fz .
(4.4)
By inserting the splitting of the stress tensor (2.83), this yields
ρdvxdt
= −∂p∂x
+∂tDxx∂x
+∂txy∂y
+∂txz∂z
+ fx .
ρdvydt
= −∂p∂y
+∂tDyy∂y
+∂txy∂x
+∂tyz∂z
+ fy .
ρdvzdt
= −∂p∂z
+∂tDzz∂z
+∂txz∂x
+∂tyz∂y
+ fz .
(4.5)
In Eq. (4.5), let us compare the acceleration terms on the left-hand sides with thepressure-gradient terms on the right-hand sides. To this end, we introduce typical valuesfor the horizontal and vertical extent of an ice sheet, the horizontal and vertical flowvelocities, the pressure and the time as follows,
typical horizontal extent [L] = 1000 km ,typical vertical extent [H] = 1 km ,
typical horizontal velocity [U ] = 100 m a−1 ,typical vertical velocity [W ] = 0.1 m a−1 ,
typical pressure [P ] = ρg[H] ≈ 10 MPa ,typical time-scale [t] = [L]/[U ] = [H]/[W ] = 104 a .
(4.6)
Further, the aspect ratio ε is defined as the ratio of vertical to horizontal extents andvelocities, respectively:
ε =[H]
[L]=
[W ]
[U ]= 10−3 . (4.7)
For the horizontal (x and y) directions, we approximate the acceleration and pressure-gradient terms as follows:
ρdvxdt∼ ρ
[U ]
[t], ρ
dvydt∼ ρ
[U ]
[t],
∂p
∂x∼ [P ]
[L],
∂p
∂y∼ [P ]
[L]. (4.8)
37

4 Large-Scale Dynamics of Ice Sheets
The ratio of these approximations for the horizontal acceleration and pressure gradient,called the Froude number Fr, is then
Fr =ρ[U ]/[t]
[P ]/[L]
(4.6)=
ρ[U ]2/[L]
ρg[H]/[L]=
[U ]2
g[H]≈ 10−15 (4.9)
(note that 1 a = 31556926 s ≈√
1015 s). For the vertical (z) direction, the approximationsare
ρdvzdt∼ ρ
[W ]
[t],
∂p
∂z∼ [P ]
[H]. (4.10)
Thus, we obtain the ratio
ρ[W ]/[t]
[P ]/[H]
(4.6)=
ρ[W ]2/[H]
ρg[H]/[H]=
[W ]2
g[H]= ε2Fr ≈ 10−21 . (4.11)
Since both ratios (4.9) and (4.11) are extremely small numbers, the acceleration term inthe momentum balance is negligible for the flow of ice sheets.
The volume force f acting on an ice sheet on the rotating Earth consists of the forceof gravity fg = ρg [see Eq. (2.55)], the centrifugal force and the Coriolis force (the lattertwo are inertial forces). Since the centrifugal force depends only on position, it is usuallycombined with the actual force of gravity to form the effective force of gravity ρg, whereρ = 910 kg m−3 is the density of ice, and g is the gravitational acceleration. On the surfaceof the Earth, the gravitational acceleration takes values between ∼ 9.78 and 9.83 m s−2
depending on latitude. Since this variability is negligible for our purposes, we adopt theconstant standard value g = |g| = 9.81 m s−2 instead. In the coordinate system shown inFig. 4.1, the vector g points in the negative z-direction:
g =
00−g
. (4.12)
Contrary to the centrifugal force, the Coriolis force depends on the flow velocity. It istherefore not possible to absorb it into an effective gravitational acceleration in the sameway as we did it for the centrifugal force. However, scaling arguments similar to those weused for the acceleration term [Eqs. (4.8)–(4.11)] show that the Coriolis force is very smalland thus negligible (see, e.g., Greve and Blatter (2009)). Therefore, the force of gravity isthe only relevant contribution for the volume force:
f = fg = ρg =
00−ρg
. (4.13)
By neglecting the acceleration term and using the volume force (4.13), the momentumbalance (4.3) simplifies to
div t = −ρg , (4.14)
38

4 Large-Scale Dynamics of Ice Sheets
which is called the Full Stokes force balance. In component form, it reads
∂txx∂x
+∂txy∂y
+∂txz∂z
= 0 ,
∂txy∂x
+∂tyy∂y
+∂tyz∂z
= 0 ,
∂txz∂x
+∂tyz∂y
+∂tzz∂z
= ρg ,
(4.15)
or, with the splitting of the stress tensor (2.83),
−∂p∂x
+∂tDxx∂x
+∂txy∂y
+∂txz∂z
= 0 ,
−∂p∂y
+∂tDyy∂y
+∂txy∂x
+∂tyz∂z
= 0 ,
−∂p∂z
+∂tDzz∂z
+∂txz∂x
+∂tyz∂y
= ρg .
(4.16)
The equation of motion results from inserting Glen’s flow law in the Full Stokes forcebalance. We use Glen’s flow law in the inverse form (3.33), which reads in components
tDxx = 2η∂vx∂x
,
tDyy = 2η∂vy∂y
,
tDzz = 2η∂vz∂z
,(4.17)
txy = η
(∂vx∂y
+∂vy∂x
),
txz = η
(∂vx∂z
+∂vz∂x
),
tyz = η
(∂vy∂z
+∂vz∂y
).
The viscosity η is given by Eq. (3.34). Inserting (4.17) in (4.16) yields
−∂p∂x
+ 2∂
∂x
(η∂vx∂x
)+
∂
∂y
(η(∂vx∂y
+∂vy∂x
))+
∂
∂z
(η(∂vx∂z
+∂vz∂x
))= 0 ,
−∂p∂y
+ 2∂
∂y
(η∂vy∂y
)+
∂
∂x
(η(∂vx∂y
+∂vy∂x
))+
∂
∂z
(η(∂vy∂z
+∂vz∂y
))= 0 ,
−∂p∂z
+ 2∂
∂z
(η∂vz∂z
)+
∂
∂x
(η(∂vx∂z
+∂vz∂x
))+
∂
∂y
(η(∂vy∂z
+∂vz∂y
))= ρg .
(4.18)
39

4 Large-Scale Dynamics of Ice Sheets
This is the Stokes equation, and the resulting type of flow is called Stokes flow.Owing to the temperature dependence of the viscosity (3.34), we have a thermo-mecha-
nically coupled problem, and its complete formulation requires an evolution equation forthe temperature field. This equation can be derived by inserting Glen’s flow law (3.33)and the constitutive equations for the heat flux (3.36) and the internal energy (3.39) inthe energy balance (2.79). We obtain
du
dt=
du
dT
dT
dt= c
dT
dt, divq = −div (κ gradT ) (4.19)
and
tr (t · D) = tr [(−p I + tD) · D] = tr [(−p I + 2ηD) · D]
= −p trD + 2η trD2 (3.6), (3.19)= 4η d2
e . (4.20)
Further, except for the very uppermost few centimetres of ice exposed to sunlight, theradiation r is negligible in an ice sheet. Thus, we obtain the temperature evolution equation
ρcdT
dt= div (κ gradT ) + 4η d2
e , (4.21)
or in component form
ρcdT
dt=
∂
∂x
(κ∂T
∂x
)+
∂
∂y
(κ∂T
∂y
)+
∂
∂z
(κ∂T
∂z
)+ 4η d2
e . (4.22)
Since the ice temperature must not exceed the pressure melting point Tm, the solution ofEq. (4.22) is subject to the secondary condition
T ≤ Tm , (4.23)
where Tm is given by Eq. (3.15).With the mass balance (4.2), the Stokes equation (4.18) and the temperature evolution
equation (4.22), we have formulated a closed system of five equations for the five unknownfields vx, vy, vz, p and T of the thermo-mechanical Stokes flow problem.
4.2.2 Boundary Conditions
In order to provide a uniquely solvable problem, the above system of equations needs tobe completed by appropriate boundary conditions at the free surface, the ice base and theice front (see Fig. 4.1). The possible presence of attached ice shelves will be ignored forthe time being.
40

4 Large-Scale Dynamics of Ice Sheets
4.2.2.1 Free Surface
The geometry of the free surface is shown in Fig. 4.3. Its position is described by thefunction
z = h(x, y, t) . (4.24)
The outer unit normal vector n points into the atmosphere. The surface mass balance as
denotes the ice volume flux through the free surface. Climatologically, it is the differencebetween the accumulation (snowfall) rate and the ablation (melting) rate at the surface.
z = h(x,y,t)
as
Atmosphere
n
v Ice
Figure 4.3: Geometry of the free surface z = h(x, y, t). n is the outer unit normal vector,v the ice velocity and as the surface mass balance.
We need a dynamic boundary condition that is related to stresses or velocities, and athermodynamic boundary condition that is related to temperatures or heat fluxes. Math-ematically, this allows many possibilities, among which we can choose most suitable onesfrom a practical point of view.
Similar to what we did for the gravity-driven thin film flow problem (Sect. 2.6.3), westipulate a stress-free condition as the dynamic boundary condition at the ice surface (thusneglecting atmospheric pressure and wind shear). By employing Eq. (2.15), this yields
tn = t · n = 0 , (4.25)
or in component formtxxnx + txyny + txznz = 0 ,
txynx + tyyny + tyznz = 0 ,
txznx + tyzny + tzznz = 0 .
(4.26)
A suitable thermodynamic boundary condition is to simply prescribe the temperatureat the ice surface by the surface temperature Ts,
T = Ts . (4.27)
Measurements have shown that Ts can be well approximated by the mean-annual surfaceair temperature, as long as the latter is ≤ 0◦C.
41

4 Large-Scale Dynamics of Ice Sheets
In addition to the dynamic and thermodynamic boundary conditions, a kinematic bound-ary condition can be formulated. This condition arises from purely geometric considera-tions. The position of the ice surface h can change because of two reasons, namely thevertical velocity vz and the surface mass balance as:
dh
dt= vz + as . (4.28)
The material time derivative can be expressed by the local and convective derivatives[Eq. (2.11)],
dh
dt=∂h
∂t+ vx
∂h
∂x+ vy
∂h
∂y(4.29)
(note that h does not depend on z, so that ∂h/∂z = 0). Thus, we obtain the kinematicboundary condition
∂h
∂t+ vx
∂h
∂x+ vy
∂h
∂y− vz = as . (4.30)
4.2.2.2 Ice Base
The geometry of the ice base is shown in Fig. 4.4. Its position is described by the function
z = b(x, y, t) . (4.31)
The outer unit normal vector n points into the lithosphere. The basal melting rate ab
denotes the ice volume flux through the ice base. In principle, basal freezing (ab < 0) isalso possible; however, this is a quite uncommon situation under grounded ice.
z = b(x,y,t)
Lithosphere (bedrock)
n
vIce ab
Figure 4.4: Geometry of the ice base z = b(x, y, t). n is the outer unit normal vector, vthe ice velocity and ab the basal melting rate.
An empirical Weertman-Budd-type sliding law serves as the required dynamic boundarycondition. It relates the basal sliding velocity vb (component of the basal velocity tangen-tial to the ice base) to the basal drag τb and the basal normal stress Nb (Fig. 4.5) in theform of a power law:
vb = −Cbτ pbN q
b
uτ , (4.32)
42

4 Large-Scale Dynamics of Ice Sheets
Lithosphere (bedrock)
n
vb
uτ
Ice
Ice flow direction
Nb
τb
Figure 4.5: On basal sliding. Nb is the basal normal stress (counted positive for compres-sion), τb the basal drag (shear stress), vb the basal sliding velocity, n the outerunit normal vector and uτ the tangential unit vector in the direction of τb.
where Cb is the basal sliding coefficient, and p and q are the basal sliding exponents.Basal sliding depends on the basal temperature Tb. Fully developed basal sliding is only
expected for a temperate base, that it, a base with the temperature at the pressure meltingpoint. In contrast, for a cold base (temperature below the pressure melting point), sliding isgreatly reduced or even negligibly small (the latter case is referred to as no-slip conditions).Consequently, the basal sliding coefficient is a function of the basal temperature:
Cb = Cb(Tb) . (4.33)
A common assumption is a binary switch between fully developed sliding and no-slipconditions:
Cb(Tb) =
0 , if Tb < Tm ,
C0b , if Tb = Tm ,
(4.34)
where Tm is the pressure melting point at the ice base and C0b is a positive constant.
However, this approach has the disadvantage of inducing a singularity at transitions fromcold to temperate areas. The singularity can be avoided by assuming a continuous functionCb(Tb) that decreases with decreasing Tb, thus allowing some sliding also for a cold base.
As for the exponents p and q, the best choice for their values is a matter of ongoingdebate. Commonly used values are (p, q) = (3, 0), (3, 1) or (3, 2) for sliding on hard rock,and (p, q) = (1, 0) for sliding on soft, deformable sediment.
If pressurised water with pressure pw is present at the ice base, this pressure worksagainst the basal normal stress exerted by the ice load. In this situation, Nb in the slidinglaw (4.32) is often assumed to be the difference between these two,
Nb = Nb,ice − pw . (4.35)
43

4 Large-Scale Dynamics of Ice Sheets
This is called the reduced normal stress, or (somewhat sloppily) the reduced pressure.As for the thermodynamic boundary condition, sufficient information on the spatio-
temporal distribution of the basal temperature is usually not available, so that it cannotbe prescribed directly. Instead, we formulate a condition for the heat fluxes. In order todo so, we must distinguish between the cases of a cold and temperate base.
The heat flux that enters the ice body from below due to the warmer Earth’s interior iscalled the geothermal heat flux qgeo (grey, upward-pointing arrows in Fig. 4.1). For a coldbase, it must be balanced with the upward heat flux into the ice q↑ and the heat producedby basal sliding qsl:
q↑ = qgeo + qsl . (4.36)
The upward heat flux q↑ is the component of the vectorial heat flux along −n. By usingFourier’s law of heat conduction (3.36), this yields
q↑ = (−κ gradT ) · (−n) = κ gradT · n . (4.37)
The heat production qsl results from the basal sliding velocity vb and the basal drag vectorτbuτ :
qsl = |vb||τbuτ | . (4.38)
Since the vectors vb and τbuτ are anti-parallel (Fig. 4.5), this is equivalent to
qsl = −vb · τbuτ . (4.39)
Since vb ⊥ n, we can add the normal stress vector Nbn to the shear stress vector τbuτ onthe right-hand side:
qsl = −vb · (Nbn + τbuτ ) . (4.40)
The term in the brackets is equal to the full stress vector tn = t ·n at the base, so that wecan write the heat production qsl as
qsl = −vb · t · n . (4.41)
Inserting (4.37) and (4.41) in (4.36) yields
κ gradT · n = qgeo − vb · t · n , (4.42)
which is a Neumann-type boundary condition for the basal temperature.For a temperature base, the situation is different. The basal temperature is then at the
pressure melting point:T = Tb = Tm , (4.43)
which is a Dirichlet-type condition. In addition to this, a flux balance similar to Eq. (4.36)holds. It requires an additional term qmelt that describes the energy comsumption due tothe basal melting rate ab:
q↑ + qmelt = qgeo + qsl . (4.44)
44

4 Large-Scale Dynamics of Ice Sheets
The physical parameter that states how much energy is needed to melt ice to water is thelatent heat L (= 3.35× 105 J kg−1). ρL is then the required energy per volume unit, thus
qmelt = ρLab . (4.45)
Inserting (4.37), (4.41) and (4.45) in (4.44) yields
κ gradT · n + ρLab = qgeo − vb · t · n , (4.46)
Since we already have condition (4.43), this equation is not required as a boundary condi-tion for the temperature any more. Instead, it allows computing the basal melting rate:
ab =qgeo − κ gradT · n− vb · t · n
ρL. (4.47)
Therefore, ab need not be prescribed. This is different from the free surface where thesurface mass balance as must be prescribed as a climatic input (along with the surfacetemperature Ts). The input required at the ice base is the geothermal heat flux qgeo thatappears in both Eqs. (4.42) for a cold base and (4.47) for a temperate base.
Similar to the free surface, a kinematic boundary condition for the ice base can beformulated. The position of the ice base b can change because of the vertical velocity vzand the basal melting rate ab:
db
dt= vz + ab . (4.48)
The material time derivative can again be expressed by the local and convective derivatives[Eq. (2.11)],
db
dt=∂b
∂t+ vx
∂b
∂x+ vy
∂b
∂y, (4.49)
so that we obtain the kinematic boundary condition
∂b
∂t+ vx
∂b
∂x+ vy
∂b
∂y− vz = ab . (4.50)
4.2.2.3 Grounded Ice Front
We assume that the lateral front of the grounded ice sheet is a vertical face with a thicknessmuch smaller than the typical thickness [H]. The ice front can either be land-terminating(not in contact with the ocean) or marine-terminating (in contact with the ocean).
The geometry of a marine-terminating front is shown in Fig. 4.6. The hydrostaticpressure distribution psw of the sea water is given by
psw =
0 , for z ≥ zsl ,
ρswg(zsl − z) , for z ≤ zsl ,(4.51)
45

4 Large-Scale Dynamics of Ice Sheets
where ρsw = 1028 kg m−3 is the density of sea water. This provides a boundary conditionfor the stress vector t · n,
t · n = −pswn =
0 , for z ≥ zsl ,
−ρswg(zsl − z)n , for z ≤ zsl ,(4.52)
where n is the unit normal vector that points in horizontal direction away from thegrounded front (Fig. 4.6).
z
Ice
Groundedfront
Ocean
Atmosphere
Lithosphere(bedrock)
psw
n
slz = z
Figure 4.6: Stress condition at a marine-terminating ice front.
The temperature at the marine-terminating front can be equated to the temperature ofthe sea water,
T = Tsw , (4.53)
which will be at the freezing point under the prevailing pressure and salinity conditions(typically Tsw ∼ − 2◦C).
For determining the position of the marine-terminating front, formulating a kinematiccondition is suitable. In order to do so, we introduce the kinematic velocity of the frontwn along the unit normal vector n. This is not an ice flow velocity, but a purely geometricquantity that tells us the migration speed of the front. Further, we introduce the horizontalice flow velocity at the front vn = vh · n (vh is the horizontal velocity vector), the calvingrate c and the frontal ablation (melting) rate amf . The sum c + amf is equal to the icevolume flux through the front (loss of ice into the ocean due to iceberg release and melting).
The marine-terminating front can migrate due to either ice flow or ice loss into theocean. Therefore, we obtain the kinematic condition
wn = vn − (c+ amf) . (4.54)
In a local coordinate system with x oriented along n and the front position denoted byx = L(t), we have
dL
dt= wn . (4.55)
46

4 Large-Scale Dynamics of Ice Sheets
Both the calving rate c and the frontal ablation rate amf are input quantities that must beprescribed or parameterized.
For a land-terminating front, Eq. (4.52) simplifies to the stress-free condition
t · n = 0 . (4.56)
Analogous to Eq. (4.27), the temperature can be equated to the surface temperature:
T = Ts . (4.57)
Instead of applying a kinematic condition like Eqs. (4.54) and (4.55), the position ofthe land-terminating front is usually determined passively by computing the ice thicknessdistribution that results from the surface mass balance, the basal melting rate and the iceflow. We will discuss this in the following (Sect. 4.2.3).
4.2.3 Ice Thickness Equation
The positions of the free surface and the ice base are in general time-dependent. As forthe ice base, we will assume for the time being that its position z = b(x, y, t) is known.We will come back to it in Chap. 7 on glacial isostasy. As for the ice surface, determiningits position z = h(x, y, t) is part of the solution of the full Stokes flow problem.
In order to do so, we introduce the ice thickness H:
H(x, y, t) = h(x, y, t)− b(x, y, t) . (4.58)
Further, we define the volume flux Q as the vertically integrated horizontal velocity,
Q =
(Qx
Qy
)=
∫ h
bvx dz∫ h
bvy dz
, (4.59)
which is a two-dimensional vector.We consider an ice column with basal area ∆x∆y and thickness H at time t (Fig. 4.7).
The position of the ice column is assumed to be fixed in the horizontal plane, and ∆xand ∆y are assumed to be constant, whereas the thickness H can change. Since ice is anincompressible material, we can balance the volume of the ice column according to
∂
∂t(Volume of ice column) = −Volume fluxes (outflow positive)
+ Volume supplies . (4.60)
The volume of the ice column is equal to H∆x∆y. Volume supplies occur at the surface andbase due to the surface mass balance (as∆x∆y) and the basal malting rate (−ab∆x∆y).Volume fluxes occur at the vertical faces of the column:
Volume fluxes = [Qx(x+ ∆x)−Qx(x)] ∆y + [Qy(y + ∆y)−Qy(y)] ∆x . (4.61)
47

4 Large-Scale Dynamics of Ice Sheets
Q (x,y+Δy,t)yQ (x,y,t)y
Q (x,y,t)x
a (x,y,t)s
a (x,y,t)b
Q (x+Δx,y,t)x
x
y
z
Δy
Δx
H(x,y,t)
Figure 4.7: On the ice thickness equation. H is the thickness of the considered ice column,∆x∆y its basal area, as the surface mass balance, ab the basal melting rateand Qx and Qy the components of the volume flux.
Assuming that ∆x and ∆y are very small, we can apply first-order Taylor expansion tothe differences in square brackets, which yields
Volume fluxes =
(∂Qx
∂x∆x
)∆y +
(∂Qy
∂y∆y
)∆x
=
(∂Qx
∂x+∂Qy
∂y
)∆x∆y = divQ ∆x∆y . (4.62)
By inserting everything in Eq. (4.60), we obtain
∂
∂t(H∆x∆y) = −divQ ∆x∆y + (as − ab) ∆x∆y . (4.63)
48

4 Large-Scale Dynamics of Ice Sheets
Since ∆x and ∆y are constant, they can be factored out of the term on the left-hand side.Dividing by ∆x∆y finally yields
∂H
∂t= −divQ + as − ab , (4.64)
or, equivalently, in components
∂H
∂t= −
(∂Qx
∂x+∂Qy
∂y
)+ as − ab . (4.65)
This result is known as the ice thickness equation. It governs the evolution of the icethickness H(x, y, t), from which the free surface h(x, y, t) can be computed via h = b+H.
4.2.4 Initial Conditions
While the mass balance (4.2) and the Stokes equation (4.18) do not contain any timederivatives, the temperature equation (4.22) and the ice thickness equation (4.65) areevolution equations. In addition to the boundary conditions formulated in Sect. 4.2.2,initial conditions are therefore required for the ice thickness and the temperature field atsome initial time tinit:
H(x, y, t= tinit) = Hinit(x, y) , (4.66)
andT (x, y, z, t= tinit) = Tinit(x, y, z) . (4.67)
4.3 Hydrostatic Approximation
In order to derive a simplified, approximated system of equations for the large-scale dy-namics of ice sheets, we go back to the full Stokes force balance in the form (4.15):
∂txx∂x
+∂txy∂y
+∂txz∂z
= 0 ,
∂txy∂x
+∂tyy∂y
+∂tyz∂z
= 0 ,
∂txz∂x
+∂tyz∂y
+∂tzz∂z
= ρg .
(4.68)
In all parts of an ice sheet, the shear stresses txz and tyz (> 100 kPa) are small comparedto the vertical normal stress tzz, which is approximately equal to the pressure p, so that[tzz] ≈ [P ] = ρg[H] ≈ 10 MPa [see (4.6)]. Consequently, the vertical force balance (4.68)3
can be reduced to a balance between the vertical gradient of tzz and the gravity force:
∂tzz∂z
= ρg . (4.69)
49

4 Large-Scale Dynamics of Ice Sheets
The same approximation in the vertical component of the stress-free condition at the freesurface (4.26)3 yields
tzz|z=h = 0 . (4.70)
Thus, Eq. (4.69) can readily be integrated,
tzz = −ρg(h− z) . (4.71)
Evidently, the vertical normal stress tzz is hydrostatic. With this result, the pressure preads
p(3.5)= p− tDxx − tDyy − tDzz
(2.83)= −tDxx − tDyy − tzz
= ρg(h− z)− tDxx − tDyy . (4.72)
Thus, the horizontal normal stresses txx, tyy can be expressed as
txx = −p+ tDxx = 2tDxx + tDyy − ρg(h− z) ,
tyy = −p+ tDyy = 2tDyy + tDxx − ρg(h− z) .(4.73)
Inserting these in the horizontal components of the force balance (4.68)1,2 yields
2∂tDxx∂x
+∂tDyy∂x
+∂txy∂y
+∂txz∂z
= ρg∂h
∂x,
2∂tDyy∂y
+∂tDxx∂y
+∂txy∂x
+∂tyz∂z
= ρg∂h
∂y.
(4.74)
By inserting Glen’s flow law in the component form (4.17), we find the equation of motion
4∂
∂x
(η∂vx∂x
)+ 2
∂
∂x
(η∂vy∂y
)+
∂
∂y
(η(∂vx∂y
+∂vy∂x
))
+∂
∂z
(η(∂vx∂z
+∂vz∂x
))= ρg
∂h
∂x,
4∂
∂y
(η∂vy∂y
)+ 2
∂
∂y
(η∂vx∂x
)+
∂
∂x
(η(∂vx∂y
+∂vy∂x
))
+∂
∂z
(η(∂vy∂z
+∂vz∂y
))= ρg
∂h
∂y.
(4.75)
The mass balance and the temperature evolution equation are the same as in the fullStokes flow problem [Eqs. (4.2) and (4.22), respectively]. Together with the new equationof motion (4.75), they constitute four equations for the four unknown fields vx, vy, vz andT . This set of field equations is called the hydrostatic approximation. Compared to thefull Stokes flow problem formulated in Sect. 4.2.1, the pressure has been eliminated, whichis a substantial simplification of the problem. The full-Stokes versions of the boundaryconditions for the ice surface, base and front (Sect. 4.2.2), the ice thickness equation(Sect. 4.2.3) and the initial conditions (Sect. 4.2.4) apply essentially without any changes[with the exception of the simplified vertical component of the stress-free condition at thefree surface, Eq. (4.70)].
50

4 Large-Scale Dynamics of Ice Sheets
4.4 First Order Approximation
A further simplification can be achieved by comparing the orders of magnitude of thecomponents of the velocity gradient in Eq. (4.75). With the typical values (4.6) and theaspect ratio (4.7), we find
∂vz∂x∼ [W ]
[L],
∂vz∂y∼ [W ]
[L],
∂vx∂z∼ [U ]
[H],
∂vy∂z∼ [U ]
[H]. (4.76)
For the respective ratios, this yields
∂vz/∂x
∂vx/∂z,∂vz/∂y
∂vy/∂z∼ [W ]/[L]
[U ]/[H]=
[W ]
[U ]
[H]
[L]= ε2 ∼ 10−6 , (4.77)
so that horizontal derivatives of the vertical velocity are negligible compared to verticalderivatives of the horizontal velocity. This allows us to neglect the terms containing hori-zontal derivatives of the vertical velocity in the viscous rheology (4.17), which yields
tDxx = 2η∂vx∂x
,
tDyy = 2η∂vy∂y
,
tDzz = 2η∂vz∂z
,(4.78)
txy = η
(∂vx∂y
+∂vy∂x
),
txz = η∂vx∂z
,
tyz = η∂vy∂z
.
Consequently, the equation of motion (4.75) simplifies to
4∂
∂x
(η∂vx∂x
)+ 2
∂
∂x
(η∂vy∂y
)+
∂
∂y
(η(∂vx∂y
+∂vy∂x
))
+∂
∂z
(η∂vx∂z
)= ρg
∂h
∂x,
4∂
∂y
(η∂vy∂y
)+ 2
∂
∂y
(η∂vx∂x
)+
∂
∂x
(η(∂vx∂y
+∂vy∂x
))
+∂
∂z
(η∂vy∂z
)= ρg
∂h
∂y.
(4.79)
51

4 Large-Scale Dynamics of Ice Sheets
As before, the viscosity η = η(T ′, de) is given by Eq. (3.34), and the effective strain ratede is given by Eq. (3.20). By neglecting ∂vz/∂x against ∂vx/∂z in Dxz and ∂vz/∂y against∂vy/∂z in Dyz, the latter reads
de =
(∂vx∂x
)2
+
(∂vy∂y
)2
+∂vx∂x
∂vy∂y
+1
4
(∂vx∂y
+∂vy∂x
)2
+1
4
(∂vx∂z
)2
+1
4
(∂vy∂z
)2
1/2
. (4.80)
In this simplified hydrostatic approximation, generally called the first order approxima-tion, Eqs. (4.79) and (4.80) contain only the horizontal components of the velocity, vx andvy. Thus, the solution of these equations is fully decoupled from the determination of thevertical velocity vz via the mass balance (4.2), in contrast to the hydrostatic approxima-tion and the full Stokes flow problem. Once the horizontal velocity has been computed bysolving the equation of motion (4.79), the vertical velocity can be obtained by integratingthe mass balance (4.2) from z = b to z:
vz = vz|z=b −∫ z
b
(∂vx∂x
+∂vy∂y
)dz . (4.81)
The vertical velocity at the ice base vz|z=b results from the kinematic condition (4.50):
vz|z=b =∂b
∂t+ vx|z=b
∂b
∂x+ vy|z=b
∂b
∂y− ab . (4.82)
The full set of field equations of the first order approximation consists of the equation ofmotion (4.79), the mass balance in the form (4.81) and the temperature evolution equation(4.22). Like for the hydrostatic approximation, the full-Stokes versions of the boundaryconditions for the ice surface, base and front (Sect. 4.2.2), the ice thickness equation(Sect. 4.2.3) and the initial conditions (Sect. 4.2.4) apply essentially without any changes.
4.5 Shallow Ice Approximation
Everywhere in an ice sheet, except the immediate vicinity of ice domes (up to and within∼ 10 km in the horizontal direction) and ice margins, the flow regime is essentially simple,bed-parallel shear, and the slopes of the free surface and the ice base are small (Fig. 4.8).Under these conditions, the relevant components of the stress deviator tD are the verticalshear stresses txz and tyz, which are supported by the basal drag. The normal stressdeviators tDxx, t
Dyy and tDzz as well as the horizontal shear stress txy are negligible:
tDxx ≈ 0 , tDyy ≈ 0 , tDzz ≈ 0 , txy ≈ 0 . (4.83)
52

4 Large-Scale Dynamics of Ice Sheets
Lithosphere (bedrock)
Icesheet
Ice dome
Figure 4.8: Flow regimes in an ice sheet. In most regions, simple, bed-parallel shear flowprevails. By contrast, in the vicinity of an ice dome, the flow direction is essen-tially downward, which leads to vertical compression and horizontal extension.Close to the ice margin, the slope of the free surface can be large. Verticalexaggeration factor ∼ 200-500.
This allows further simplifications of the hydrostatic approximation to be made, whichgo beyond the first order approximation, and are known as the shallow ice approximation(SIA) (Hutter 1983, Morland 1984). All normal stresses are equal to the negative pressure,
txx = tyy = tzz = −p . (4.84)
Thus, the vertical component of the hydrostatic force balance (4.69) simplifies to
∂p
∂z= −ρg , (4.85)
and the integrated form (4.71) reads
p = ρg(h− z) . (4.86)
This means that the pressure in the SIA is hydrostatic (equal to the overburden ice load).The horizontal components of the hydrostatic force balance (4.74)1,2 simplify to
∂txz∂z
= ρg∂h
∂x,
∂tyz∂z
= ρg∂h
∂y.
(4.87)
The vertical component of the stress-free condition (4.70) yields
p|z=h = 0 . (4.88)
53

4 Large-Scale Dynamics of Ice Sheets
With this and Eq. (4.83), the horizontal components of the stress-free condition (4.26)1,2
simplify totxz|z=h = 0 , tyz|z=h = 0 . (4.89)
Using this result, Eq. (4.87) (the right-hand side of which does not depend on z) canreadily be integrated from an arbitrary z position to the free surface z = h. This yields
txz = −ρg(h− z)∂h
∂x,
tyz = −ρg(h− z)∂h
∂y.
(4.90)
Equations (4.86) and (4.90) tell us that in the SIA the stress field, the only non-negligiblecomponents of which are p, txz and tyz, is fully determined if the geometry of the ice sheetis known. Due to Eqs. (4.83) and (4.90), the effective stress (3.13) is
σe =√t2xz + t2yz
= ρg(h− z)
((∂h∂x
)2+(∂h∂y
)2)1/2
= ρg(h− z) |gradh| . (4.91)
The results (4.90) and (4.91) are now inserted in the x-z and y-z components of Glen’sflow law in the form (3.32):
Dxz = EA(T ′)σn−1e txz
= −EA(T ′) [ρg(h− z)]n|gradh|n−1∂h
∂x,
Dyz = EA(T ′)σn−1e tyz
= −EA(T ′) [ρg(h− z)]n|gradh|n−1∂h
∂y.
(4.92)
Based on the order of magnitudes of the spatial derivatives of the velocity components(Eq. (4.77)), we can approximate Dxz by (∂vx/∂z)/2 and Dyz by (∂vy/∂z)/2:
∂vx∂z
= −2EA(T ′) [ρg(h− z)]n|gradh|n−1∂h
∂x,
∂vy∂z
= −2EA(T ′) [ρg(h− z)]n|gradh|n−1∂h
∂y.
(4.93)
This can be integrated from the ice base z = b to an arbitrary position z in the ice sheetin order to compute the horizontal velocities,
vx = vbx − 2(ρg)n|gradh|n−1∂h
∂x
∫ z
bEA(T ′) (h− z)n dz ,
vy = vby − 2(ρg)n|gradh|n−1∂h
∂y
∫ z
bEA(T ′) (h− z)n dz ,
(4.94)
54

4 Large-Scale Dynamics of Ice Sheets
where vbx and vby are the respective velocities at the ice base.The latter are determined by the sliding law (4.32). We assume that the bed slopes
can be approximated by the ratio of the typical vertical extent and the typical horizontalextent (Eq. (4.6)) and are thus small:
∂b
∂x,∂b
∂y∼ [H]
[L]= ε . (4.95)
Consequently, the outer unit normal vector of the ice base is approximately vertical,
n =
00−1
, (4.96)
and the tangential unit vector uτ lies approximately in the horizontal (x–y) plane (Fig. 4.5).Due to Eq. (4.96), the basal stress vector (tn)b = tb ·n is equal to the negative of the thirdcolumn of the stress tensor,
(tn)b = −
(txz)b
(tyz)b
(tzz)b
(4.84)=
−(txz)b
−(tyz)b
pb
. (4.97)
The basal shear stress (drag) vector is equal to the x–y component of (4.97),
τdrag = τbuτ = −(
(txz)b
(tyz)b
)(4.90)= ρgH
∂h
∂x∂h
∂y
, (4.98)
and the basal normal stress is equal to the z component of (4.97),
Nb = pb(4.86)= ρgH . (4.99)
Decomposing the vector equation (4.98) into its absolute value and direction yield
τb = |τbuτ | = ρgH
((∂h
∂x
)2
+(∂h
∂y
)2)1/2
= ρgH |gradh| (4.100)
and
uτ =τbuττb
=1
|gradh|
∂h
∂x∂h
∂y
. (4.101)
By inserting (4.99), (4.100) and (4.101) in the sliding law (4.32), we obtain
vbx = −Cb(ρgH)p−q|gradh|p−1∂h
∂x,
vby = −Cb(ρgH)p−q|gradh|p−1∂h
∂y.
(4.102)
55

4 Large-Scale Dynamics of Ice Sheets
Note that, if the basal water pressure pw is to be considered (see Eq. (4.35)), the scalarfactor Cb(ρgH)p−q|gradh|p−1 changes slightly, while the structure of the equation remainsthe same.
Inserting Eq. (4.102) in Eq. (4.94) yields the horizontal velocity
vx = −{Cb(ρgH)p−q|gradh|p−1
+ 2(ρg)n|gradh|n−1∫ z
bEA(T ′) (h− z)n dz
}∂h
∂x,
vy = −{Cb(ρgH)p−q|gradh|p−1
+ 2(ρg)n|gradh|n−1∫ z
bEA(T ′) (h− z)n dz
}∂h
∂y.
(4.103)
By abbreviating the scalar function in curly brackets as
C = C(x, y, z, t)
= Cb(ρgH)p−q|gradh|p−1 + 2(ρg)n|gradh|n−1∫ z
bEA(T ′) (h− z)n dz , (4.104)
we can express the horizontal velocity (4.103) as
(vxvy
)= −C
∂h
∂x∂h
∂y
= −C gradh . (4.105)
That is, in the shallow ice approximation, the direction of the horizontal velocity is anti-parallel to the gradient of the free surface. In other words, the ice always flows down thesteepest surface slope, irrespective of the bedrock topography (see Fig. 4.9). This holdsfor any particle of the ice sheet, even the near-basal ice. However, note that this resultis only valid as long as the bed slopes are sufficiently small, as described by Eq. (4.95).Otherwise, the shallow ice approximation is not valid any more.
As for the first order approximation, the vertical velocity can be computed by integratingthe mass balance (4.2) from z = b to z:
vz = vz|z=b −∫ z
b
(∂vx∂x
+∂vy∂y
)dz . (4.106)
In this equation, vx and vy are given by Eq. (4.105), and the vertical velocity at the icebase vz|z=b is determined by the kinematic condition (4.82):
vz|z=b =∂b
∂t+ vx|z=b
∂b
∂x+ vy|z=b
∂b
∂y− ab . (4.107)
56

4 Large-Scale Dynamics of Ice Sheets
xz
yv (x,y,z,t)h
grad h
h1h2
h3 h4
h5
Figure 4.9: Surface topography and horizontal velocity in the shallow ice approximation.The horizontal velocity vh = (vx, vy) is anti-parallel to the direction of thesurface gradient gradh.Surface-topography contours: h1 > h2 > h3 > h4 > h5.
In order to formulate the ice thickness equation for the shallow ice approximation, wecompute the volume flux Q [see Eq. (4.59)] with the horizontal velocities (4.105). Thisyields (
Qx
Qy
)= −D
∂h
∂x∂h
∂y
, (4.108)
with the scalar function
D = D(x, y, t) =∫ h
bC dz . (4.109)
The function C depends on z only via the integral term in (4.104), for which we find byintegration by parts∫ h
b
∫ z
bEA(T ′) (h− z)n dz dz =
∫ h
b1∫ z
bEA(T ′) (h− z)n dz dz
=[z∫ z
bEA(T ′) (h− z)n dz
]hb−∫ h
bzEA(T ′) (h− z)n dz
= h∫ h
bEA(T ′) (h− z)n dz −
∫ h
bzEA(T ′) (h− z)n dz
=∫ h
bEA(T ′) (h− z)n+1 dz . (4.110)
57

4 Large-Scale Dynamics of Ice Sheets
Thus, the function D is
D = D(x, y, t)
= CbH(ρgH)p−q|gradh|p−1
+ 2(ρg)n|gradh|n−1∫ h
bEA(T ′) (h− z)n+1 dz . (4.111)
By inserting the volume flux (4.108) with the function (4.111) into the ice thickness equa-tion (4.65), we obtain
∂H
∂t=
∂
∂x
(D∂h
∂x
)+
∂
∂y
(D∂h
∂y
)+ as − ab , (4.112)
or, alternatively, expressed as an evolution equation for the surface topography h,
∂h
∂t=
∂
∂x
(D∂h
∂x
)+
∂
∂y
(D∂h
∂y
)+ as − ab +
∂b
∂t. (4.113)
Mathematically, Eq. (4.113) is a non-linear diffusion equation with additional source terms.The surface mass balance as is a climatic input quantity, and the basal melting rate ab isdetermined by Eq. (4.47). The unknown variation ∂b/∂t of the ice-base/bedrock topog-raphy can be obtained from a model of glacial isostasy, which will be treated later (seeChap. 7).
As for the temperature evolution equation (4.22), we complement the typical values (4.6)by the typical temperature variation magnitude
[∆T ] = 20 K . (4.114)
Then, we find for the ratio of horizontal and vertical heat conduction
∂
∂x
(κ∂T
∂x
)/ ∂
∂z
(κ∂T
∂z
),
∂
∂y
(κ∂T
∂y
)/ ∂
∂z
(κ∂T
∂z
)∼ κ
[∆T ]
[L]2
/κ
[∆T ]
[H]2=
[H]2
[L]2= ε2 = 10−6 , (4.115)
so that horizontal heat conduction is negligible. In contrast, the ratio of the respectiveadvection terms [that are hidden in (4.22) in the material time derivative dT/dt] is(
vx∂T
∂x
)/(vz∂T
∂z
),(vy∂T
∂y
)/(vz∂T
∂z
)∼ [U ][∆T ]
[L]
/ [W ][∆T ]
[H]=
[U ]
[W ]
[H]
[L]=
1
ε× ε = 1 , (4.116)
so that none of the advection components are negligible. Therefore, the temperatureevolution equation reads
ρc(∂T∂t
+ vx∂T
∂x+ vy
∂T
∂y+ vz
∂T
∂z
)=
∂
∂z
(κ∂T
∂z
)+ 4η d2
e . (4.117)
58

4 Large-Scale Dynamics of Ice Sheets
In the strain heating term Φ = 4η d2e, we replace the effective strain rate de by the effective
stress σe by using Eq. (3.21) combined with Eq. (3.27),
de = EA(T ′)σne , (4.118)
and Eq. (3.31) for the fluidity (inverse viscosity):
Φ = 4η d2e =
4
ϕd2
e =4
2EA(T ′)σn−1e
× E2A2(T ′)σ2ne = 2EA(T ′)σn+1
e . (4.119)
With this, the temperature evolution equation becomes
ρc(∂T∂t
+ vx∂T
∂x+ vy
∂T
∂y+ vz
∂T
∂z
)=
∂
∂z
(κ∂T
∂z
)+ 2EA(T ′)σn+1
e , (4.120)
where σe is given by Eq. (4.91). The boundary conditions for this equation are the pre-scribed surface temperature (4.27), the temperature gradient (4.42) for a cold base andthe melting temperature (4.43) for a temperate base.
The shallow ice approximation simplifies the problem of large-scale ice sheet flow drasti-cally. The stress field is given by the simple, analytic expressions (4.86), (4.90) and (4.91),and the velocity field depends only on the local ice sheet geometry and temperature via(4.105) and (4.106). [In contrast, in the full Stokes flow problem, the hydrostatic approxi-mation and the first order approximation systems of non-linear differential equations mustbe solved.] As a consequence of this local behaviour, the boundary conditions for the icefront [Eqs. (4.51)–(4.57)] are not needed. The remaining “hard work” is the solution ofthe surface evolution equation (4.113) and of the temperature evolution equation (4.120).
4.6 Driving Stress
Equation (4.90) represents the vertical shear stress in the shallow ice approximation. Eval-uating this equation at the bed (z = b) yields the vector
τdriving = −ρgH
∂h
∂x∂h
∂y
, (4.121)
which is often called the driving stress.By construction, the driving stress corresponds to the basal shear stress in the shallow
ice approximation. However, its definition is not limited to the shallow ice approximation,and it can be interpreted in general as the action that drives the flow of the ice sheet.In the shallow ice approximation, the driving stress τdriving is equal to the negative of thebasal drag τdrag [see Eq. (4.98)]:
τdriving + τdrag = 0 . (4.122)
59

4 Large-Scale Dynamics of Ice Sheets
This means that the driving forces and the resistive forces are balanced locally at the bedof the ice sheet. In the full Stokes problem, the hydrostatic approximation and the firstorder approximation such a local balance does not hold. However, the driving stress andthe basal drag still balance on average for the entire domain of the ice sheet (van derVeen 1999). Local imbalances are compensated by the deviatoric normal stresses tDxx andtDyy as well as the horizontal shear stress txy (which are all neglected in the shallow iceapproximation).
4.7 Analytical Solutions
4.7.1 Simplified Problem
For very simple, idealised cases, the equations of the shallow ice approximation derived inSect. 4.5 can be solved analytically. Let us consider the following situation (Fig. 4.10):
• Plane strain approximation: two-dimensional flow in the x-z plane, any lateral effectsneglected (see Sect. 2.6.3).
• Steady-state conditions: ∂(·)/∂t = 0 for all field quantities.
• Flat, rigid bed: b(x) = 0.
• Ice sheet extent between x = −L and x = L, symmetric around the ice divide atx = 0.
• No basal melting (ab = 0), no basal sliding (Cb = 0).
• Constant rate factor A, flow enhancement factor E = 1: EA(T ′) = A = const.
The last assumption decouples the mechanical from the thermodynamical problem, andtherefore we do not have to deal with the temperature evolution equation (4.120).
With the assumptions made above, the ice thickness equation (4.113) becomes
d
dx
(D
dh
dx
)+ as = 0 . (4.123)
By using Eq. (4.108), this can also be written with the volume flux Q = Qx as
dQ
dx= as . (4.124)
The reason for replacing the partial derivatives ∂/∂x in Eq. (4.113) by plain derivativesd/dx in Eqs. (4.123) and (4.124) is that the fields depend only on the single variable x.The assumption of symmetry with respect to x = 0 implies Q(0) = 0. Thus, integratingEq. (4.124) from x = 0 to any arbitrary x yields
Q(x) =∫ x
0as(x
′) dx′ . (4.125)
60

4 Large-Scale Dynamics of Ice Sheets
h(x)
L0−L
z
x
a (x)s
Figure 4.10: Simplified problem for the shallow ice approximation, which allows computingthe steady-state topography h(x) analytically for certain distributions of thesurface mass balance as(x).
According to Eqs. (4.108) and (4.111), we find for the volume flux
Q(x) = −2A(ρg)n∣∣∣∣∣dhdx
∣∣∣∣∣n−1
dh
dx
∫ h
0(h− z)n+1 dz
= −2A(ρg)n∣∣∣∣∣dhdx
∣∣∣∣∣n−1
dh
dx
[−(h− z)n+2
n+ 2
]h0
= −2A(ρg)n
n+ 2hn+2
∣∣∣∣∣dhdx
∣∣∣∣∣n−1
dh
dx
= −A0 hn+2
∣∣∣∣∣dhdx
∣∣∣∣∣n−1
dh
dx. (4.126)
In the last step, the abbreviation
A0 =2A(ρg)n
n+ 2(4.127)
has been introduced.For the half-domain 0 < x < L, the surface topography h decreases monotonically from
the ice divide at x = 0 to the margin at x = L, so that Q > 0 and dh/dx < 0. This allowsto take the nth root of Eq. (4.126),
h(n+2)/n dh
dx= −
(Q(x)
A0
)1/n
. (4.128)
Separation of variables yields
h(n+2)/n dh = −(Q(x)
A0
)1/n
dx . (4.129)
61

4 Large-Scale Dynamics of Ice Sheets
This can be integrated from x = 0 to any arbitrary x:
∫ h
h0(h′)(n+2)/n dh′ = −
∫ x
0
(Q(x′)
A0
)1/n
dx′ , (4.130)
where h0 is the (unknown) surface elevation at the ice divide. By evaluating the integralon the left-hand side, we obtain
n
2n+ 2
(h(2n+2)/n − h(2n+2)/n
0
)= −
∫ x
0
(Q(x′)
A0
)1/n
dx′ , (4.131)
so that
h(2n+2)/n = h(2n+2)/n0 − 2n+ 2
n
∫ x
0
(Q(x′)
A0
)1/n
dx′ . (4.132)
The ice thickness equation has thus been reduced to a quadrature, which can be solvedanalytically depending on the mass balance function as(x) that determines the volume fluxQ(x) via Eq. (4.125).
4.7.2 Vialov Profile
In order to simplify the problem further, we assume that the surface mass balance as is apositive constant (snowfall rate) over the entire domain. From Eq. (4.125), we obtain thevolume flux
Q(x) = asx . (4.133)
Inserting this in Eq. (4.132) yields
h(2n+2)/n = h(2n+2)/n0 − 2n+ 2
n
(as
A0
)1/n ∫ x
0(x′)1/ndx′
= h(2n+2)/n0 − 2n+ 2
n
(as
A0
)1/n
× n
n+ 1x(n+1)/n
= h(2n+2)/n0 − 2
(as
A0
)1/n
x(n+1)/n . (4.134)
With the boundary condition h(L) = 0, we obtain for the surface elevation at the ice divide
h(2n+2)/n0 = 2
(as
A0
)1/n
L(n+1)/n
⇒ h0 = 2n/(2n+2)
(as
A0
)1/(2n+2)
L1/2 . (4.135)
62

4 Large-Scale Dynamics of Ice Sheets
Inserting this result into Eq. (4.134) yields
h(2n+2)/n = 2(as
A0
)1/n
(L(n+1)/n − x(n+1)/n)
= 2(as
A0
)1/n
L(n+1)/n
[1−
(x
L
)(n+1)/n], (4.136)
or
h = 2n/(2n+2)(as
A0
)1/(2n+2)
L1/2
[1−
(x
L
)(n+1)/n]n/(2n+2)
. (4.137)
By reintroducing h0 from Eq. (4.135), this can be written in compact form as
h = h0
[1−
(x
L
)(n+1)/n]n/(2n+2)
. (4.138)
This solution is called the Vialov profile (Vialov 1958). Note that for negative values of x,that is, for the half-domain −L < x < 0, the variable x must be replaced by |x| in orderto maintain the symmetry of the profile.
0
1
2
3
4
-750 -500 -250 0 250 500 750
z [k
m]
x [km]
h0
L
h(x)
Figure 4.11: Vialov profile (4.138) for L = 750 km, n = 3, as = 0.3 m a−1, A =10−16 a−1 Pa−3, ρ = 910 kg m−3 and g = 9.81 m s−2.
An example is shown in Fig. 4.11. The parameters are those of the EISMINT modelintercomparison exercise described by Huybrechts et al. (1996), which resemble the condi-tions of the Greenland ice sheet. For a half-span of L = 750 km, the maximum elevationresulting from Eq. (4.135) is h0 = 3575.1 m. It is interesting to note that the profile appearspointed at the divide. This is so because at x = 0 the curvature (second derivative) of thefunction h(x) defined by Eq. (4.138) is infinite, a problem which is related to the fact thatthe shallow ice approximation is not valid there. Further, the slope (first derivative) of theprofile is infinite at the margins x = ±L, which violates the assumption of small surfaceslopes.
63

4 Large-Scale Dynamics of Ice Sheets
-200
-100
0
100
200
-750 -500 -250 0 250 500 750
Q [1000 m
^2/a
]
x [km]
Figure 4.12: Volume flux for the Vialov profile shown in Fig. 4.11.
The volume flux Q follows from Eq. (4.133). For the above EISMINT parameters, it isshown in Fig. 4.12. The volume flux vanishes at the ice divide, and it increases linearly awayfrom the divide with a gradient of dQ/dx = as = 0.3 m2 a−1/m in order to balance the iceaccumulation. At the margin, the volume flux reaches a value of Q(L) = 2.25×105 m2 a−1,which can be interpreted as the calving rate into a surrounding ocean.
The Vialov profile has some interesting properties. For a given snowfall rate as, Eq. (4.135)implies for the aspect ratio defined by Eq. (4.7)
ε =[H]
[L]=h0
L∼ 1
L1/2. (4.139)
Hence, larger ice bodies are shallower than smaller ones. While we have derived this onlyfor a highly idealised problem of ice sheet flow in the shallow ice approximation, it is atendency observed for real-world ice bodies of all sizes. Small glaciers can have aspectratios as large as ε ∼ 10−1, ice caps often have ε ∼ 10−2, and for ice sheets ε ∼ 10−3 holds[Eq. (4.7)]. When comparing the two present-day ice sheets, the larger Antarctic ice sheetis shallower then the smaller Greenland ice sheet.
For a given half-span L and n = 3, Eq. (4.135) implies
h0 ∼ a1/8s . (4.140)
This means that the thickness increases only with the 8th root of the snowfall rate. Dou-bling the snowfall rate leads to an increase of the thickness by only a factor 21/8 ≈ 1.09.Conversely, doubling the thickness requires an increase of the snowfall rate by a factor28 = 256.
It is also possible to obtain the horizontal velocity vx(x, z) for the Vialov profile analyti-cally. Starting from Eq. (4.94)1, a calculation very similar to the one leading to Eq. (4.126)provides the result
vx = −2A(ρg)n
n+ 1
∣∣∣∣∣dhdx
∣∣∣∣∣n−1
dh
dx
[hn+1 − (h− z)n+1
], (4.141)
64

4 Large-Scale Dynamics of Ice Sheets
where h(x) is given by Eq. (4.138). The surface velocity (at z = h) that results fromEq. (4.141) is
vsx = −2A(ρg)n
n+ 1hn+1
∣∣∣∣∣dhdx
∣∣∣∣∣n−1
dh
dx. (4.142)
For n = 3, the vertical profile is a quartic function in z (Fig. 4.13) that illustrates nicelythe shear flow regime sketched in Fig. 4.8.
0 0.2 0.4 0.6 0.8 1v
x/v
sx
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1z/
h
Figure 4.13: Vertical profile of the horizontal velocity according to Eq. (4.141) for n = 3.Vertical coordinate z scaled to the ice surface (= thickness) h, horizontalvelocity vx scaled to the surface velocity vsx.
The vertical velocity vz(x, z) results from Eqs. (4.106) and (4.141):
vz = −∫ z
0
(∂vx∂x
)dz , (4.143)
where we have used the fact that, with the assumptions made for the Vialov profile, thekinematic condition (4.107) leads to vz|z=b = 0. Evaluating the integral in Eq. (4.143)analytically is too complicated, this must be done by numerical quadrature.
Analytical solutions of Eq. (4.132) for variable surface mass balance functions as(x)based on Bueler (2003) and Bueler et al. (2005) are discussed in the textbook by Greveand Blatter (2009).
65

5 Dynamics of Glacier Flow
5.1 Glaciers Versus Ice Sheets
As mentioned in the introduction (Chapter 1), the size of land ice masses spans severalorders of magnitude, from large ice sheets of a few thousand kilometres in diameter downto small glaciers of a few hundreds of metres in length. Consequently, the scaling given forice sheets in Chapter 4 [Eqs. (4.6) and (4.114)] is not valid for smaller ice caps and glaciers,and needs to be modified. However, both the acceleration and the Coriolis force remainnegligible, and therefore the Stokes flow problem formulated in Sect. 4.2 is applicableto land ice masses of all shapes and sizes. On the other hand, the applicability of theapproximations defined in Sects. 4.3 to 4.5 is limited by the size of the ice masses. Whilethe hydrostatic approximation and the first order approximation still provide reasonableaccuracy for most problems of glacier flow, the shallow ice approximation is valid for thelarge-scale description of ice sheets and large ice caps only.
In addition to these dynamical issues, the thermal regime of ice sheets and glaciers showsimportant differences. Most ice in ice sheets is cold ice, i.e., its temperature is below thelocal pressure melting point. Temperate ice, with a temperature at the pressure meltingpoint, exists only at the base or in thin, near-basal layers. While this behaviour is sharedby glaciers at high latitudes, in glaciers at lower latitudes temperate ice occurs alongsidecold ice, and many of them consist entirely of temperate ice except for a thin cold surfacelayer in winter. Glaciers that consist entirely of cold ice are called cold glaciers, glaciersthat consist entirely of temperate ice are called temperate glaciers, and glaciers in whichsignificant amounts of both temperate and cold ice occur are called polythermal glaciers.We will not expand further on glacier thermodynamics here and refer the interested readerto Greve and Blatter (2009, Sect. 9.3).
In the following, we will only consider the “parallel sided slab” as a simple, analyticallysolvable problem. More details on glacier-specific topics like two-dimensional flowline mod-els, two-dimensional cross-section models etc., are discussed by Greve and Blatter (2009,Chapter 7).
5.2 Parallel Sided Slab
Depending on the exact geometry, the central part of a small valley glacier can sometimesbe roughly approximated as a parallel sided slab on an inclined bed, similar to the gravity-driven thin-film flow discussed in Sect. 2.6.3. This is sketched in Fig. 5.1.
66

5 Dynamics of Glacier Flow
z
xy
a
g
H
Figure 5.1: Approximation of the central part of a valley glacier (grey-shaded) as a parallelsided slab.
In order to formulate the ice-flow problem for the parallel sided slab as full Stokes flow,let us make the following assumptions:
• Plane strain approximation: purely two-dimensional flow in the vertical x-z plane,no dependencies on the transverse coordinate y.
• Constant thickness H and inclination angle α.
• Uniformity in the downslope (x) direction: ∂(·)/∂x = 0 for all field quantities.
• Steady-state conditions: ∂(·)/∂t = 0 for all field quantities.
• Flat, rigid bed: b(x, t) = 0 (in the inclined coordinate system). The free surface istherefore given by h(x, t) = H.
• No surface mass balance (as = 0).
• No basal melting (ab = 0), no basal sliding (Cb = 0).
• Glen’s flow law (3.35) with stress exponent n = 3.
• Constant rate factor A, flow enhancement factor E = 1: EA(T ′) = A = const.
• Constant heat conductivity: κ(T ) = κ = const.
Thus, the mass balance (4.2) simplifies to
∂vz∂z
= 0 . (5.1)
With the above assumptions, the kinematic conditions (4.30) at the free surface and (4.50)at the glacier bed imply
vz|z=H = 0 , vz|z=0 = 0 , (5.2)
67

5 Dynamics of Glacier Flow
and so the solution of Eq. (5.1) is simply
vz = 0 . (5.3)
Consequently, the velocity field is entirely described by the profile of the downslope velocity,vx(z).
With the evident decomposition of the gravity vector g, gx = g sinα and gz = −g cosα,the x-component of the Stokes equation [compare Eqs. (4.14) and (4.18)1] reads
−∂p∂x
+ 2∂
∂x
(η∂vx∂x
)+
∂
∂y
(η(∂vx∂y
+∂vy∂x
))+
∂
∂z
(η(∂vx∂z
+∂vz∂x
))= −ρg sinα . (5.4)
With the above assumptions, this simplifies to
∂
∂z
(η∂vx∂z
)= −ρg sinα . (5.5)
The first integral of this equation is
η∂vx∂z
= C1 − ρgz sinα , (5.6)
where C1 is an integration constant. Due to Glen’s flow law in the form (4.17) and theassumed uniformity in x-direction (thus ∂vz/∂x = 0), the left-hand side is equal to theshear stress txz,
txz = η∂vx∂z
= C1 − ρgz sinα , (5.7)
which vanishes at the free surface (z = H) due to the stress-free boundary condition (4.26)[note that, for the geometry considered here, the components of the outer normal unitvector are nx = 0, ny = 0 and nz = 1]. Hence, the integration constant can be determined,
txz|z=H = C1 − ρgH sinα = 0 ⇒ C1 = ρgH sinα , (5.8)
and we obtain the linear shear stress profile
txz = η∂vx∂z
= ρg(H − z) sinα . (5.9)
In order to carry out the second integration, we insert the explicit form of the viscositywhich results from Eq. (3.34),
η =1
2B d−(1−1/n)
e , where B = A−1/n and de =1
2
∂vx∂z
(5.10)
68

5 Dynamics of Glacier Flow
[de results from Eq. (3.20)]. Inserting (5.10) in (5.9) yields
1
2A−1/n
(1
2
∂vx∂z
)−(1−1/n)∂vx∂z
= ρg(H − z) sinα
⇒ A−1/n
(1
2
∂vx∂z
)1/n
= ρg(H − z) sinα
⇒ ∂vx∂z
= 2A(ρg sinα)n(H − z)n
⇒ vx = −2A(ρg sinα)n
n+ 1(H − z)n+1 + C2 . (5.11)
The integration constant C2 results from the no-slip condition vx|z=0 = 0 (no basal sliding),
vx|z=0 = −2A(ρg sinα)n
n+ 1Hn+1 + C2 = 0
⇒ C2 =2A(ρg sinα)n
n+ 1Hn+1 . (5.12)
Therefore, we obtain the velocity profile
vx =2A(ρg sinα)n
n+ 1
[Hn+1 − (H − z)n+1
], (5.13)
which is a quartic function of z for the stress exponent n = 3.Analogous to Eq. (5.4), the z-component of the Stokes equation [compare Eqs. (4.14)
and (4.18)3] reads
−∂p∂z
+ 2∂
∂z
(η∂vz∂z
)+
∂
∂x
(η(∂vx∂z
+∂vz∂x
))+
∂
∂y
(η(∂vy∂z
+∂vz∂y
))= ρg cosα . (5.14)
With the above assumptions for the parallel-sided-slab problem, this simplifies to
∂p
∂z= −ρg cosα . (5.15)
The integral of this equation is
p = C3 − ρgz cosα . (5.16)
Owing to the stress-free boundary condition at the free surface (4.26), the pressure vanishesthere, which yields the integration constant C3,
p|z=H = C3 − ρgH cosα = 0 ⇒ C3 = ρgH cosα . (5.17)
69

5 Dynamics of Glacier Flow
Thus, we obtain the hydrostatic pressure profile
p = ρg(H − z) cosα . (5.18)
It is interesting to note that the results for the pressure, Eq. (5.18), and the shear stress,Eq. (5.9), are identical to those for the thin-film flow of an incompressible Newtonian fluid(see Sect. 2.6.3). The nonlinearity of Glen’s flow law affects only the velocity profile, whichis quartic here [Eq. (5.13)], but parabolic for the Newtonian fluid [Eq. (2.98)].
It is also possible to compute the temperature profile analytically. The temperatureequation (4.22) reads
ρc
(∂T
∂t+ vx
∂T
∂x+ vy
∂T
∂y+ vz
∂T
∂z
)
=∂
∂x
(κ∂T
∂x
)+
∂
∂y
(κ∂T
∂y
)+
∂
∂z
(κ∂T
∂z
)+ 4ηd2
e , (5.19)
which simplifies to∂
∂z
(κ∂T
∂z
)= −4ηd2
e . (5.20)
By using Eq. (5.10), this can be rewritten as follows,
∂
∂z
(κ∂T
∂z
)= −4× 1
2A−1/n
(1
2
∂vx∂z
)−(1−1/n)
×(
1
2
∂vx∂z
)2
= −(2A)−1/n
(∂vx∂z
)1+1/n
. (5.21)
We substitute the term ∂vx/∂z from Eq. (5.11) and obtain
∂
∂z
(κ∂T
∂z
)= −(2A)−1/n [2A(ρg sinα)n(H − z)n]1+1/n
= −2A(ρg sinα)n+1(H − z)n+1. (5.22)
The first integral of this equation is
κ∂T
∂z=
2A(ρg sinα)n+1
n+ 2(H − z)n+2 + C4 . (5.23)
By assuming that the basal temperature does not reach the pressure melting point, theintegration constant can be obtained from the basal boundary condition (4.42),
−κ ∂T∂z
∣∣∣∣∣z=0
= qgeo
⇒ −2A(ρg sinα)n+1
n+ 2Hn+2 − C4 = qgeo
⇒ C4 = −qgeo −2A(ρg sinα)n+1
n+ 2Hn+2 , (5.24)
70

5 Dynamics of Glacier Flow
so that
κ∂T
∂z= −qgeo −
2A(ρg sinα)n+1
n+ 2
[Hn+2 − (H − z)n+2
]. (5.25)
Further integration yields
T = −qgeo
κz − 2A(ρg sinα)n+1
κ(n+ 2)
[Hn+2z +
(H − z)n+3
n+ 3
]+ C5 . (5.26)
With the surface boundary condition (4.27), the integration constant can be computed,
T |z=H = Ts
⇒ −qgeo
κH − 2A(ρg sinα)n+1
κ(n+ 2)Hn+3 + C5 = Ts
⇒ C5 = Ts +qgeo
κH +
2A(ρg sinα)n+1
κ(n+ 2)Hn+3 . (5.27)
Thus, we obtain for the temperature profile the relation
T = Ts +qgeo
κ(H − z)
+2AHn+3(ρg sinα)n+1
κ(n+ 2)
[1− z
H− 1
n+ 3
(H − zH
)n+3]. (5.28)
The first line describes a linear profile due to heat conduction only, and the nonlinearmodification in the second line is due to the strain heating term 4ηd2
e in the temperatureequation (5.20).
For a glacier of 100 m thickness and 10◦ inclination, the results for the velocity profile,Eq. (5.13), and the temperature profile, Eq. (5.28), are depicted in Fig. 5.2. The simple-shear profile of the horizontal velocity with the largest shear rates (∂vx/∂z) close to thebase and smallest shear rates close to the surface is evident, and the surface velocity reachesa value of 18.6 m a−1. The temperature increases from −10◦C at the surface to −4.71◦C atthe base, and the profile is slightly curved due to the strain heating, which is also largestnear the base. The importance of the strain heating is further highlighted by comparisonwith the linear profile resulting from heat conduction only, for which the basal temperaturereaches a mere −7.62◦C.
71

5 Dynamics of Glacier Flow
0 5 10 15 20Velocity v
x [m/a]
0
10
20
30
40
50
60
70
80
90
100
Hei
ght a
bove
bas
e z
[m]
-10 -9 -8 -7 -6 -5 -4Temperature T [°C]
0
10
20
30
40
50
60
70
80
90
100
Hei
ght a
bove
bas
e z
[m]
Figure 5.2: Parallel sided slab: Velocity and temperature profiles according to Eqs. (5.13)and (5.28), for H = 100 m, α = 10◦, Ts = −10◦C, qgeo = 50 mW m−2, n = 3,A = 10−16 a−1 Pa−3, ρ = 910 kg m−3, κ = 2.1 W m−1 K−1 and g = 9.81 m s−2
(solid lines). The dashed line in the temperature panel shows the linear profilethat results from heat conduction only (strain heating neglected).
72

6 Large-Scale Dynamics of Ice Shelves
6.1 Geometry
Ice shelves are floating ice masses, which are connected to and nourished by a grounded icesheet (see Fig. 4.1). Most ice shelves, like the three major ice shelves of Antarctica (RossIce Shelf, Filchner-Rønne Ice Shelf, Amery Ice Shelf), are confined by large embayments.Smaller ice shelves can also be unconfined. In the latter case, stabilisation typically resultsfrom the contact with small islands or grounding on shoals.
6.2 Full Stokes Flow Problem
6.2.1 Field Equations, Boundary Conditions at the Free Surface
Ice shelves are smaller and thinner than ice sheets and, on average, the ice flow is distinctlyfaster. Suitable typical values for large ice shelves are
typical horizontal extent [L] = 500 km ,typical vertical extent [H] = 500 m ,
typical horizontal velocity [U ] = 1000 m a−1 ,typical vertical velocity [W ] = 1 m a−1 ,
typical pressure [P ] = ρg[H] ≈ 5 MPa ,typical time-scale [t] = [L]/[U ] = [H]/[W ] = 500 a ,
typical temperature variation [∆T ] = 20 K
(6.1)
[compare Eqs. (4.6) and (4.114) for ice sheets]. Note the resulting time-scale [t], which istwenty times smaller than that of ice sheets. The scales (6.1) give an aspect ratio of
ε =[H]
[L]=
[W ]
[U ]= 10−3 (6.2)
and a Froude number of
Fr =[U ]2
g[H]≈ 2× 10−13 . (6.3)
Evidently, the aspect ratio is the same as for ice sheets, whereas the Froude number is largerby a factor 200, but still very small. Thus, like for ice sheets and glaciers, the accelerationremains negligible. We note without proof that the same holds for the Coriolis force, sothat the flow of ice shelves is also governed by Stokes flow. Therefore, the mass balance
73

6 Large-Scale Dynamics of Ice Shelves
(4.2), the equation of motion (4.18) and the temperature evolution equation (4.22) remainvalid.
Like for ice sheets and glaciers, the free surface of ice shelves is an ice/atmosphere inter-face (see Fig. 4.3). The stress-free condition (4.26), the temperature boundary condition(4.27) and the kinematic condition (4.30) hold without any changes.
6.2.2 Boundary Conditions at the Ice Base
The situation is different at the ice base. It is now an interface between ice and sea waterand therefore situated above the lithosphere surface (b ≥ zl, see Fig. 4.1). Both meltingand freezing processes can occur, so that the ice volume flux through the base, ab, canhave either sign and must be interpreted as a basal melting-freezing rate. It is positivefor melting and negative for freezing. Apart from this extended interpretation of ab, thekinematic boundary condition (4.50) remains valid, and so does the ice thickness equation(4.65).
Whereas the lithospheric stress under grounded ice is unknown, the stress conditions inthe sea water can be described by a hydrostatic pressure psw. It corresponds to the weightof the water column from the water surface (mean sea level z = zsl) to the ice base (z = b),
psw = ρswg(zsl − b) , (6.4)
where ρsw = 1028 kg m−3 is the density of sea water. Equating this to the stress t ·n actingon the ice base yields the stress condition
t · n = −pswn = −ρswg(zsl − b)n . (6.5)
This relation serves as a dynamic boundary condition at the base of an ice shelf.The temperature of the ice at the ice base is equal to the temperature of the sea water
immediately below:T = Tsw , (6.6)
which, as already stated in Sect. 4.2.2.3, will be at the freezing point under the prevailingpressure and salinity conditions. The situation is therefore comparable to that of a tem-perate base of grounded ice [see Eq. (4.43)], for which we also had Eq. (4.47) for ab. Asimilar energy balance could also be formulated here. However, instead of the geothermalheat flux qgeo, it would contain a quantity qsea that describes the heat flux entering theice body from the sea water below. This quantity depends on the detailed dynamic andthermodynamic conditions of the sea water below the ice and is usually not known (unlesswe use a sophisticated ocean model to compute it). Therefore, we cannot compute thebasal melting-freezing rate ab. Instead, it is an input quantity that must be prescribed orparameterized (similar to the surface temperature Ts and the surface mass balance as).
74

6 Large-Scale Dynamics of Ice Shelves
6.2.3 Boundary Conditions at the Grounding Line and Calving Front
Boundary conditions are also required at the lateral margins. These are (1) the groundingline (in contact with the attached ice sheet), and (2) the calving front (in contact with thesurrounding ocean).
At the grounding line, the inflow vgl and temperature Tgl from the ice sheet are usuallyprescribed directly. The position of the grounding line can be found by solving a contactproblem for the coupled ice-sheet/ice-shelf problem. This is based on the topologicalcondition that the ice base cannot penetrate the lithosphere surface:
∀x, y, t : b(x, y, t) ≥ zl(x, y, t) . (6.7)
For any given point (x, y) and time t, the ice is assumed to be grounded if it touches thelithosphere surface:
b(x, y, t) = zl(x, y, t) ⇒ grounded ice. (6.8)
By contrast, the ice is assumed to be floating if the ice base is situated above the lithospheresurface:
b(x, y, t) > zl(x, y, t) ⇒ floating ice. (6.9)
The position of the grounding line is the boundary of the two domains (grounded vs.floating ice) that result from the conditions (6.8) and (6.9).
The situation at the calving front is very similar to that at a marine-terminating frontfor grounded ice (Sect. 4.2.2.3). The hydrostatic pressure distribution psw of the sea waterprovides a boundary condition for the stress vector t · n,
t · n = −pswn =
0 , for z ≥ zsl ,
−ρswg(zsl − z)n , for z ≤ zsl ,(6.10)
where n is the unit normal vector which points in a horizontal direction away from thecalving front (Fig. 6.1). The temperature at the calving front can be prescribed directlyas
T = Tsw . (6.11)
For determining the position of the calving front, we formulate a kinematic conditionanalogous to Eq. (4.54),
wn = vn − (c+ acf) , (6.12)
where wn is the kinematic velocity of the calving front, vn = vh · n the horizontal ice flowvelocity at the calving front (vh is the horizontal velocity vector), c the calving rate andacf the frontal ablation (melting) rate. The sum c + acf is equal to the ice volume fluxthrough the calving front (loss of ice into the ocean due to iceberg release and melting). Ina local coordinate system with x oriented along n and the calving front position denotedby x = L(t), we obtain
dL
dt= wn (6.13)
[cf. Eq. (4.55)]. Both the calving rate c and the frontal ablation rate acf are input quantitiesthat must be prescribed or parameterized.
75

6 Large-Scale Dynamics of Ice Shelves
z
Ice shelf
Calvingfront
Ocean
Atmosphere
psw
n
slz = z
Figure 6.1: Stress condition at the calving front of an ice shelf.
6.3 Hydrostatic Approximation
The hydrostatic approximation works the same way as for ice sheets. By neglecting theshear stresses txz and tyz in the vertical component of the full Stokes force balance, we findthe hydrostatic distribution (4.71) for the vertical normal stress tzz, and the relation (4.72)for the pressure p. This leads to the expressions (4.73) for the horizontal normal stressestxx and tyy. By inserting them in the horizontal components of the full Stokes force balanceand applying Glen’s flow law, we obtain the equation of motion (4.75), which replaces theStokes equation (4.18).
6.4 Shallow Shelf Approximation
Similar to ice sheets, ice shelves are characterised by a small aspect ratio [see Eq. (6.2)]and small slopes of the free surface and the ice base. The latter can be expressed as
∂h
∂x,∂h
∂y∼ [H]
[L]= ε ,
∂b
∂x,∂b
∂y∼ [H]
[L]= ε .
(6.14)
Since at the base of an ice shelf significant shear stresses cannot be maintained [see thestress condition (6.5)], the regime of bed-parallel shear flow found in grounded ice sheetscannot exist in floating ice shelves. By contrast, the typical situation is that of plug flow,whereby the horizontal velocities are essentially constant over depth. Naturally, in theimmediate vicinity of the grounding line, a transitional state between these two limits willdevelop. The situation is illustrated in Fig. 6.2.
76

6 Large-Scale Dynamics of Ice Shelves
~ ~
~~
~~~~~
~~
~
~
~
~~
x
z
y
Lithosphere
Ice sheet
Ice shelf
Transitionzone
Ocean
Grounding line
Figure 6.2: Flow regimes in an ice-sheet/ice-shelf system. In the grounded ice sheet, shearflow prevails, whereas in the floating ice shelf plug flow is present. The vicinityof the grounding line shows a transitional flow pattern.
These considerations make clear that the step from the hydrostatic approximation to thefirst order approximation [Eq. (4.77)] cannot be made for ice shelves. Instead, we will nowderive a further simplification of the hydrostatic approximation that is called the shallowshelf approximation (SSA) (Morland 1987). Mathematically, the regime of plug flow canbe defined by
∂vx∂z≈ 0 ,
∂vy∂z≈ 0 . (6.15)
In other words, the horizontal velocities only depend on the horizontal coordinates andthe time,
vx = vx(x, y, t) , vy = vy(x, y, t) . (6.16)
Under these conditions, the relevant components of the stress deviator tD are the normalstress deviators tDxx, t
Dyy and tDzz as well as the horizontal shear stress txy. The vertical shear
stresses txz and tyz are negligible:
txz ≈ 0 , tyz ≈ 0 . (6.17)
This is radically different from the shallow ice approximation for ice sheets [compareEq. (4.83)].
We go back to the horizontal components of the hydrostatic force balance in the form(4.74):
2∂tDxx∂x
+∂tDyy∂x
+∂txy∂y
+∂txz∂z
= ρg∂h
∂x,
2∂tDyy∂y
+∂tDxx∂y
+∂txy∂x
+∂tyz∂z
= ρg∂h
∂y.
(6.18)
77

6 Large-Scale Dynamics of Ice Shelves
Let Nij be the vertically integrated deviatoric stresses:
Nij =
h∫b
tDij dz . (6.19)
A rather lengthy computation that will not be presented in detail here [see Greve andBlatter (2009))] shows that integrating Eq. (6.18) vertically from the ice base z = b to theice surface z = h and using Eq. (6.17) yields
2∂Nxx
∂x+∂Nyy
∂x+∂Nxy
∂y= ρgH
∂h
∂x,
2∂Nyy
∂y+∂Nxx
∂y+∂Nxy
∂x= ρgH
∂h
∂y.
(6.20)
This is the force balance of the shallow shelf approximation.Note that the right-hand sides of Eq. (6.20) are equal to the negative x- and y-components
of the driving stress τdriving [Eq. (4.121)]. If we define the left-hand sides of Eq. (6.20) asthe components of the membrane stress τmembrane,
τmembrane =
2∂Nxx
∂x+∂Nyy
∂x+∂Nxy
∂y
2∂Nyy
∂y+∂Nxx
∂y+∂Nxy
∂x
, (6.21)
we can write the shallow-shelf force balance (6.20) in compact form as
τdriving + τmembrane = 0 . (6.22)
This means that, in the shallow shelf approximation, the driving stress and the membranestress are balanced locally. By contrast, for the shallow ice approximation, we found alocal balance between the driving stress and the basal drag [Eq. (4.122)].
The ice surface h and the ice thickness H are related by the floating condition. It statesthat each ice column is locally in hydrostatic equilibrium (weight = buoyancy):
ρgH = ρswg(zsl − b) ⇒ ρH = ρsw(zsl − b) (6.23)
[for the detailed derivation, see also Greve and Blatter (2009))]. By replacing b = h−H,it can be rearranged into a relation for the freeboard, h − zsl, (part of the ice shelf abovethe water level),
ρH = ρsw(zsl − h+H) ⇒ h− zsl = H − ρ
ρsw
H =ρsw − ρρsw
H . (6.24)
With the values ρ = 910 kg m−3 and ρsw = 1028 kg m−3, the freeboard is approximatelyequal to 11.5% of the ice shelf thickness, so that the remaining 88.5% will be below thewater level.
78

6 Large-Scale Dynamics of Ice Shelves
Vertically integrating the flow law (3.33) gives
Nxx = 2η Dxx = 2η∂vx∂x
,
Nyy = 2η Dyy = 2η∂vy∂y
,
Nxy = 2η Dxy = η
(∂vx∂y
+∂vy∂x
),
(6.25)
where the independence of vx and vy on z [Eq. (6.16)] and the definition of the verticallyintegrated stresses [Eq. (6.19)] have been used, and the depth-integrated viscosity
η =
h∫b
η dz =
h∫b
1
2EsB(T ′) d−(1−1/n)
e dz (6.26)
has been introduced. The effective strain rate de, of which the general component form isgiven by Eq. (3.20), can be simplified for the plug flow regime [Eq. (6.15)] to
de =
(∂vx∂x
)2
+
(∂vy∂y
)2
+∂vx∂x
∂vy∂y
+1
4
(∂vx∂y
+∂vy∂x
)2
+1
4
(∂vz∂x
)2
+1
4
(∂vz∂y
)2
1/2
. (6.27)
With the scaling (6.1) and the aspect ratio (6.2), we can estimate the orders of magnitudeof the terms (∂vx/∂x)2 and (∂vz/∂x)2,(
∂vx∂x
)2
∼ [U ]2
[L]2,
(∂vz∂x
)2
∼ [W ]2
[L]2= ε2 [U ]2
[L]2. (6.28)
Consequently, the term (∂vz/∂x)2 is negligible compared to (∂vx/∂x)2. The same holdsfor (∂vz/∂y)2 compared to (∂vy/∂y)2, and so we obtain a further simplified expression forthe effective strain rate,
de =
(∂vx∂x
)2
+
(∂vy∂y
)2
+∂vx∂x
∂vy∂y
+1
4
(∂vx∂y
+∂vy∂x
)2
1/2
. (6.29)
This relation is independent of the vertical coordinate z, which reduces the depth-integratedviscosity (6.26) to
η =1
2d−(1−1/n)
e
h∫b
EsB(T ′) dz . (6.30)
79

6 Large-Scale Dynamics of Ice Shelves
Inserting the vertically integrated flow law (6.25) in the vertically integrated force bal-ance (6.20) finally yields the equation of motion of the shallow shelf approximation:
4∂
∂x
(η∂vx∂x
)+ 2
∂
∂x
(η∂vy∂y
)+
∂
∂y
(η(∂vx∂y
+∂vy∂x
))= ρgH
∂h
∂x,
4∂
∂y
(η∂vy∂y
)+ 2
∂
∂y
(η∂vx∂x
)+
∂
∂x
(η(∂vx∂y
+∂vy∂x
))= ρgH
∂h
∂y.
(6.31)
This is a system of non-linear elliptical differential equations for the horizontal velocitiesvx and vy.
This system requires boundary conditions along the lateral margin of the ice shelf. At thegrounding line, the inflow vgl from the nourishing ice sheet is usually prescribed, which isa simple, Dirichlet-type condition. For the position of the grounding line, the shallow shelfapproximation allows a simplified formulation of the contact problem [Eqs. (6.7)–(6.9)] byusing the floating condition (6.23). It can be rearranged to
b = zsl −ρ
ρsw
H . (6.32)
Combining this with the inequality (6.7) yields
zsl −ρ
ρsw
H ≥ zl ⇒ H ≤ ρsw
ρ(zsl − zl) . (6.33)
For any point (x, y) and time t, the ice is assumed to be floating if the inequality (6.33) isfulfilled. Otherwise, that is, for the case
H >ρsw
ρ(zsl − zl) , (6.34)
the ice is assumed to be grounded, and the position of the grounding line is given by theboundary of the two domains.
At the calving front, the stress condition needs to be evaluated. Equation (6.10) readsin component form
(−p+ tDxx)cf nx + txy|cf ny = −psw nx ,
txy|cf nx + (−p+ tDyy)cf ny = −psw ny ,
txz|cf nx + tyz|cf ny = 0 .
(6.35)
With the relation (4.72) for the pressure p in the hydrostatic approximation, Eqs. (6.35)1,2
yield(2tDxx + tDyy)cf nx + txy|cf ny = −psw nx + ρg(h− z)nx ,
txy|cf nx + (2tDyy + tDxx)cf ny = −psw ny + ρg(h− z)ny .(6.36)
80

6 Large-Scale Dynamics of Ice Shelves
Using Eq. (4.51) for the sea-water pressure and definition (6.19) for the vertically integratedstresses, this is readily integrated,
(2Nxx +Nyy)cf nx +Nxy|cf ny
=
(∫ h
bρg(h− z) dz −
∫ zsl
bρswg(zsl − z) dz
)nx ,
Nxy|cf nx + (2Nyy +Nxx)cf ny
=
(∫ h
bρg(h− z) dz −
∫ zsl
bρswg(zsl − z) dz
)ny .
(6.37)
The integral terms on the right hand side yield(. . .)
=ρgH2
2− ρswg(zsl − b)2
2
(6.23)=
ρgH2
2−(ρ
ρsw
)2ρswgH
2
2
=ρ
ρsw
(ρsw − ρ)gH2
2, (6.38)
so that for the stress condition at the calving front we obtain
(2Nxx +Nyy)cf nx +Nxy|cf ny =ρ
ρsw
(ρsw − ρ)gH2
2nx ,
Nxy|cf nx + (2Nyy +Nxx)cf ny =ρ
ρsw
(ρsw − ρ)gH2
2ny .
(6.39)
Inserting the vertically integrated flow law (6.25) yields the corresponding boundary con-dition for the velocities,
4η∂vx∂x
∣∣∣∣∣cf
nx + 2η∂vy∂y
∣∣∣∣∣cf
nx + η
(∂vx∂y
+∂vy∂x
)cf
ny
=ρ
ρsw
(ρsw − ρ)gH2
2nx ,
η
(∂vx∂y
+∂vy∂x
)cf
nx + 4η∂vy∂y
∣∣∣∣∣cf
ny + 2η∂vx∂x
∣∣∣∣∣cf
ny
=ρ
ρsw
(ρsw − ρ)gH2
2ny .
(6.40)
The position of the calving front is governed by the kinematic condition [Eqs. (6.12),(6.13)], which does not simplify in the shallow shelf approximation.
81

6 Large-Scale Dynamics of Ice Shelves
The geometry and structure of the elliptical boundary-value problem for the horizontalvelocity field, which consists of the system of differential equations (6.31) and its associatedboundary conditions at the grounding line and at the calving front, are illustrated inFig. 6.3.
~
~
~~
~~
~
~~
~
~
~~
~~
~
xz
y
Ocean
Ice shelf
Ice sheetGrounding line
Calving front
v (x,y,t)h
vgl
c, acf
Figure 6.3: Ice shelf geometry in the horizontal map plane. The horizontal velocity fieldvh = (vx, vy) is a solution of the elliptical differential equations (6.31) and theboundary conditions at the grounding line and at the calving front. Inputquantities are the inflow velocity at the grounding line, vgl, and the calvingrate, c, and frontal ablation rate, acf , at the calving front.
The system of model equations in the shallow shelf approximation is completed bythe vertically integrated mass balance, the ice thickness equation and the temperatureevolution equation. The vertically integrated mass balance is essentially the same asEq. (4.106); however, we formulate it with the sea level instead of the ice base as thereference horizon,
vz = vz|z=zsl −∫ z
zsl
(∂vx∂x
+∂vy∂y
)dz
= vz|z=zsl − (z − zsl)
(∂vx∂x
+∂vy∂y
). (6.41)
Hence the vertical velocity is linear over depth. The ice thickness equation [see Eq. (4.65)]is
∂H
∂t= −
(∂Qx
∂x+∂Qy
∂y
)+ as − ab
= −(∂(Hvx)
∂x+∂(Hvy)
∂y
)+ as − ab . (6.42)
82

6 Large-Scale Dynamics of Ice Shelves
Equation (4.117) is a suitable form of the temperature evolution equation:
ρc(∂T∂t
+ vx∂T
∂x+ vy
∂T
∂y+ vz
∂T
∂z
)=
∂
∂z
(κ∂T
∂z
)+ 4η d2
e . (6.43)
It is given simple, Dirichlet-type boundary conditions (prescribed temperatures) at thesurface, the ice base, the grounding line and the calving front as described above (Sect. 6.2).
It is instructive to compare the structure of the model equations of the shallow shelfapproximation with that of the shallow ice approximation (Sect. 4.5). In the shallow iceapproximation for ice sheets, the stresses, the horizontal velocity and the volume flux arelocal functions of the ice geometry and temperature. This means that information aboutthe state of the ice sheet at other positions is not required in order to compute them. Thisis in strong contrast to the shallow shelf approximation, where the stresses, the horizontalvelocity and the volume flux are determined by differential equations for the entire areaof the ice shelf. Therefore, at any position they are influenced by the state of the wholeice shelf, or, in other words, they depend in a non-local way on the ice geometry andtemperature. Of course, this makes the solution of the shallow shelf approximation moredifficult.
6.5 Ice Shelf Ramp
Under certain conditions, it is possible to obtain analytical solutions for the equations ofthe shallow shelf approximation. Let us consider the following problem:
• Plane strain approximation (two-dimensional flow in the x-z plane).
• Ice shelf extent between x = 0 and x = L, grounding line at x = 0, calving front atx = L.
• Thickness of the ice shelf linearly decreasing from H = Hgl at the grounding line toH = Hcf at the calving front.
• Mean sea level at z = zsl = 0.
• Inflow from attached ice sheet with velocity vgl (in x-direction).
• Steady-state conditions: ∂(·)/∂t = 0 for all field quantities.
• Constant rate factor A, flow enhancement factor E = 1: EA(T ′) = A = const.
The geometry of this ice shelf ramp is illustrated in Fig. 6.4. The thickness H(x) can beexpressed as
H = Hgl −Hgl −Hcf
Lx . (6.44)
83

6 Large-Scale Dynamics of Ice Shelves
With the floating condition in the alternative forms (6.23) and (6.24), the free surface andthe ice base are given by
h =ρsw − ρρsw
H , b = − ρ
ρsw
H . (6.45)
x
Calving front (x = L)
z
yIce shelf
Ocean
Atmosphere
Grounding line (x = 0)
vgl
Hgl
Hcf
~~~
~
~~~ ~
~~
~
~~
~~
~~
~ ~
~~
~~
Figure 6.4: Ice shelf ramp of length L. The thickness decreases linearly from H = Hgl atthe grounding line (x = 0) to H = Hcf at the calving front (x = L).
The velocity field consists of the two functions vx(x) and vz(x, z), so that the effectivestrain rate (6.29) is simply
de =
∣∣∣∣∣dvxdx
∣∣∣∣∣ =dvxdx
. (6.46)
The absolute value bars can be dropped because dvx/dx > 0 for the ice shelf ramp. Withthis result, the depth-integrated viscosity (6.30) reads
η =BH
2
(dvxdx
)−(1−1/n)
, (6.47)
where the constant B = A−1/n (associated rate factor) has been introduced.The horizontal velocity vx is governed by the x-component of the equation of motion
(6.31)1, whereas the y-component (6.31)2 vanishes identically due to the plane strain ap-proximation. Equation (6.31)1 simplifies to
4d
dx
(η
dvxdx
)= ρgH
dh
dx, (6.48)
and by inserting Eqs. (6.45)1 and (6.47), we obtain
2Bd
dx
H (dvxdx
)1/n =
ρ
ρsw
(ρsw − ρ)gHdH
dx
84

6 Large-Scale Dynamics of Ice Shelves
=ρ
ρsw
(ρsw − ρ)gd
dx
(H2
2
). (6.49)
The first integral of this equation is
2BH
(dvxdx
)1/n
=ρ
ρsw
(ρsw − ρ)gH2
2+ C1 . (6.50)
The integration constant C1 can be determined by using the boundary condition (6.40) atthe calving front. With nx = 1 and ny = 0, it yields
4ηdvxdx
∣∣∣∣∣cf
=ρ
ρsw
(ρsw − ρ)gH2
2, (6.51)
or with the depth-integrated viscosity (6.47),
2BH
(dvxdx
)1/n∣∣∣∣∣∣cf
=ρ
ρsw
(ρsw − ρ)gH2
2. (6.52)
Comparison of Eq. (6.50), taken at the calving front, and the boundary condition (6.52)yields C1 = 0.
We proceed by solving Eq. (6.50) for the velocity derivative and integrating the resultfrom the grounding line x = 0 to an arbitrary position x,
dvxdx
=
(ρ
ρsw
(ρsw − ρ)gH
4B
)n
⇒ vx(x) = vgl +(%g
4B
)nHn(x) , (6.53)
with the abbreviations
% =ρ
ρsw
(ρsw − ρ) , Hn(x) =
x∫0
Hn(x) dx . (6.54)
For the ice ramp defined by Eq. (6.44), the thickness integral reads
Hn(x) =
[− L
(n+ 1)(Hgl −Hcf)
(Hgl −
Hgl −Hcf
Lx)n+1
]x0
=L
(n+ 1)(Hgl −Hcf)
×Hn+1gl
1−(
1− Hgl −Hcf
LHgl
x
)n+1 . (6.55)
85

6 Large-Scale Dynamics of Ice Shelves
0 25 50 75 100 125 150 175 200Position x [km]
0
0.5
1
1.5
2
Vel
ocity
vx [k
m/a
]
Figure 6.5: Ice shelf ramp: Horizontal velocity vx according to Eqs. (6.53) and (6.55),for Hgl = 400 m, Hcf = 200 m, L = 200 km, vgl = 100 m a−1, n = 3, A =4.9×10−25 s−1 Pa−3 (value for T ′ = −10◦C), ρ = 910 kg m−3, ρsw = 1028 kg m−3
and g = 9.81 m s−2.
Equations (6.53) and (6.55) describe the horizontal velocity for the ice shelf ramp. For thestress exponent n = 3, it is a quartic function of the position x.
An example is shown in Fig. 6.5. Even though the set-up is that of a rather small andthin ice shelf (see figure caption), a maximum velocity as large as 1.66 km a−1 is reached atthe calving front. This is due to the fact that our two-dimensional, plane strain ice shelfdoes not feel any lateral drag, which would reduce the flow speed in a natural ice shelf.
The vertical velocity can be computed by inserting the horizontal velocity (6.53) intothe vertically integrated mass balance (6.41),
vz = vz|z=0 −dvxdx
z = vz|z=0 −(%g
4B
)n dHn
dxz
= vz|z=0 −(%gH
4B
)nz . (6.56)
The value of the integration constant vz|z=0 (vertical velocity at sea level) can be deter-mined only if the distributions of the surface mass balance as and the basal mass balanceab are known. For simplicity we assume instead that the ratio of as and ab is such thatvz|z=0 = 0. The result for the vertical velocity is then
vz(x, z) = −(%gH(x)
4B
)nz . (6.57)
It is illustrated in Fig. 6.6 for the center of the ice shelf described in the legend of Fig. 6.5.The total mass balance at the upper and lower interface, as−ab (where supply is positive
and loss negative), can be obtained from the ice thickness equation (6.42) by employingthe steady-state assumption,
as − ab =d(Hvx)
dx. (6.58)
86

6 Large-Scale Dynamics of Ice Shelves
-0.5 0 0.5 1 1.5 2Vertical velocity v
z [m/a]
-250
-200
-150
-100
-50
0
Hei
ght
z [m
]
x = 100 km
Figure 6.6: Ice shelf ramp: Profile of the vertical velocity vz in the center of the ice shelf(x = L/2 = 100 km) according to Eq. (6.57). Parameters as in Fig. 6.5.
With the horizontal velocity (6.53), this yields
as − ab = Hdvxdx
+ vxdH
dx
= H(%g
4B
)n dHn
dx+
dH
dx
[vgl +
(%g
4B
)nHn
]
= H(%gH
4B
)n+
dH
dx
[vgl +
(%g
4B
)nHn
], (6.59)
which is depicted in Fig. 6.7 for the set-up of Fig. 6.5. In this example, the total massbalance is positive in slightly more than the inner half of the ice shelf (until x ≈ 128 km)and negative in the outer part towards the calving front.
It is also instructive to discuss the degenerate case of an ice shelf with constant thickness,which can be realised by setting Hgl = Hcf = H = const. One may intuitively concludethat for this situation there is no ice flow, because the negative driving stress ρgH(dh/dx)on the right-hand side of the equation of motion (6.48) vanishes. However, this is not thecase. For a constant thickness H, the thickness integral Hn(x) defined in Eq. (6.54)2 isgiven by Hn(x) = Hnx. Inserting this into the velocity equation (6.53) yields the linearlyincreasing velocity distribution
vx(x) = vgl +(%gH
4B
)nx , (6.60)
which corresponds to the constant horizontal stretching rate
Dxx =dvxdx
=(%gH
4B
)n. (6.61)
87

6 Large-Scale Dynamics of Ice Shelves
0 25 50 75 100 125 150 175 200Position x [km]
-2
0
2
4
6
8
Mas
s ba
lanc
e [m
/a]
Figure 6.7: Ice shelf ramp: Total mass balance at the upper and lower interface, as − ab,according to Eq. (6.59). Parameters as in Fig. 6.5.
The vertical compression rate [due to Eq. (6.57)] is then
Dzz =dvzdz
= −(%gH
4B
)n. (6.62)
Of course, the two strain rates add up to zero, which is a requirement of incompressibility.The reason for this counterintuitive behaviour of horizontal stretching and vertical com-
pression of the ice, despite constant ice thickness, is the existence of the calving front as aboundary of the system. Beyond the calving front, there is no more ice which could hinderthe extension of the ice shelf, and the sea-water pressure at the calving front is not strongenough to buttress the ice shelf completely.
88

7 Glacial Isostasy
7.1 Structure of the Earth
From seismological studies it can be inferred that the interior of the Earth reveals a layeredstructure, the different layers being mutually separated by changes in the chemical compo-sition and/or phase transitions (Fig. 7.1, left). The uppermost layer, the crust, has a meanthickness of 20 km (which, however, varies significantly from place to place; it is thickestbelow mountains and thinnest below oceans), a mineral composition and a mean densityof 2900 kg m−3. The crust is underlain by a mineral mantle of 2900 km in thickness anda density varying from 3300 kg m−3 at the top to 5700 kg m−3 at the bottom. Below, the3500 km thick, metallic core is found, which can be subdivided into an outer, liquid, andan inner, solid part. The density of the core increases from approximately 9400 kg m−3 atthe top to 13500 kg m−3 at the center of the Earth.
Inner core 1300 km
Outer core 2200 km
Mantle 2900 km
Crust 20 km Lithosphere100 km
Asthenosphere100 km
Figure 7.1: Layered structure of the Earth’s interior. Left: Classification by chemicalcomposition. Right: Classification by rheological properties.
However, from the point of view of rheological properties, this classification is not sat-isfactory for the upper regions. The crust and the uppermost part of the mantle behavemainly as an elastic solid; however, with increasing depth, viscous fluid properties becomemore dominant over geological periods due to the increasing temperature of the mantle
89

7 Glacial Isostasy
material. Further down, the viscosity increases again due to the changing composition.Because of this, the crust and the uppermost part of the mantle comprise the ∼ 100 kmthick elastic lithosphere, underlain by a further ∼ 100 km thick layer of low viscosity,known as the asthenosphere (Fig. 7.1, right). By contrast, the remaining part of the man-tle down to the outer core is characterised by a less pronounced, but nonetheless relevant,fluid behaviour.
Within this rheological classification, the well-known process of plate tectonics can beinterpreted as the motion of solid lithosphere plates on the viscous asthenosphere layer,driven by internal convection currents. As we will see below, for the dynamics of glacialisostasy the rheological classification is also favourable and usually applied.
7.2 Simple Isostasy Models
In this section, simple models for the problem of glacial isostasy, based on a plane, two-layer, lithosphere/asthenosphere system, will be presented. Hereby, the lithosphere layer istreated in two different ways, either as a locally deforming plate (local lithosphere, “LL”),or as a thin elastic plate (elastic lithosphere, “EL”). For the asthenosphere, the relaxingasthenosphere (“RA”) approach is employed where the viscous effects are parameterisedby a constant time lag. The possible combinations lead to two different models, referredto as LLRA and ELRA.
7.2.1 LLRA Model
The most simple isostasy model combines the local lithosphere with the relaxing astheno-sphere. The idea of the local lithosphere is that an ice load q(x, y) = ρgH(x, y), at a givenposition (x, y), causes a steady-state displacement of the lithosphere, wss, in the vertical,z, direction at the position (x, y) only (Fig. 7.2). Note that, in this chapter, we take z aspositive downward, and identify the undisturbed position of the lithosphere base (in theabsence of any ice loading) with z = 0. The value of wss (taken positive downward aswell) is determined by the balance between the ice load and the buoyancy force which thelithosphere experiences in the underlying viscous asthenosphere,
ρagwss = ρgH ⇒ wss =ρ
ρa
H , (7.1)
where ρa = 3300 kg m−3 is the density of the asthenosphere.Due to the viscous properties of the asthenosphere, for the case of time-dependent ice
loads q(x, y, t), the lithosphere cannot assume the steady-state displacement wss immedi-ately. Instead, the response will have a time lag, and the relaxing asthenosphere parame-terises this lag by a single time constant, τa, of the order of 1000s of years (a widely usedvalue is τa = 3 ka). The evolution of the actual displacement, w, with time, t, is thendetermined by
∂w
∂t= − 1
τa
(w − wss) , (7.2)
90

7 Glacial Isostasy
z
0
Lithosphere
Asthenospherewss
Hl
Ice load rgH
Figure 7.2: Local lithosphere: A localised ice load q = ρgH causes a vertical steady-statedisplacement of the lithosphere, wss, at the position of the load only. Hl denotesthe lithosphere thickness.
which relates the vertical velocity of the lithosphere, ∂w/∂t, linearly to the deviation of thedisplacement from the steady state, w − wss. Provided the ice thickness H, and thereforethe steady-state displacement wss, do not change with time, the solution of (7.2) is
w(x, y, t) = wss(x, y) + [w0(x, y)− wss(x, y)] e−t/τa , (7.3)
so that any non-steady-state initial displacement w0 relaxes exponentially into its steady-state value with the time constant τa (Fig. 7.3).
0 1 2 3 4 5Time t/
a
Dis
plac
emen
t w
w0
wss
Figure 7.3: Vertical displacement of the lithosphere as a function of time for the relaxingasthenosphere, with an initial displacement w0 and a steady-state displacementwss (assumed to be constant over time). Time is shown in units of the time lagτa.
The great strength of the LLRA model is its simplicity (only a single parameter, thetime-lag constant τa, is needed) and easy implementation in numerical models. It feeds backto the ice sheet equations of Chapter 4 as follows. Let zl,0(x, y) be the reference position ofthe lithosphere surface in the coordinate system of Chapter 4 (vertical coordinate positive
91

7 Glacial Isostasy
upward, see Fig. 4.1) for w = 0 (no displacement). The actual position of the lithospheresurface is then
zl(x, y, t) = zl,0(x, y)− w(x, y, t) , (7.4)
where the displacement w is governed by Eq. (7.3). Since the ice base b and the lithospheresurface zl fall together under a grounded ice sheet, the time derivative reads
∂zl
∂t=∂b
∂t= −∂w
∂t. (7.5)
This result enters the ice surface equation, for instance in its shallow ice form (4.113).
7.2.2 ELRA Model
The local lithosphere assumption, that the response to an ice load is a purely local dis-placement of the lithosphere, is certainly unrealistic. Instead, it is clear that the elasticityof the lithosphere layer must result in a non-local response, so that positions at somedistance from an imposed ice load still suffer a displacement (Fig. 7.4).
Lithosphere
Asthenospherez
0
Ice load rgH
Hl
wss
Figure 7.4: Elastic lithosphere: A localised ice load q = ρgH causes a horizontally dis-tributed (non-local) vertical steady-state displacement of the lithosphere, wss.Hl denotes the lithosphere thickness.
A rather easy way to describe this behaviour more adequately is the thin elastic plate,governed by the biharmonic equation
Kl ∆2wss + ρagwss = ρgH , (7.6)
where the operator ∆2 is the biharmonic operator [Laplacian squared, cf. Eq. (2.89)]. Incomponents, Eq. (7.6) reads
Kl
(∂4wss
∂x4+ 2
∂4wss
∂x2∂y2+∂4wss
∂y4
)+ ρagwss = ρgH . (7.7)
The parameter Kl is the flexural stiffness of the lithosphere,
Kl =ElH
3l
12(1− ν2l )
=µlH
3l
6(1− νl), (7.8)
92

7 Glacial Isostasy
where Hl is the thickness, El Young’s modulus, νl Poisson’s ratio and µl the shear modulusof the lithosphere (indicated by the subscript “l”).
Compared to the local lithosphere equation (7.1), the thin plate equation (7.6) containsan additional term of fourth order in the spatial derivative of the displacement which repre-sents the flexural rigidity. Note that this term depends, apart from the elastic coefficients,on the lithosphere thickness Hl, whereas the simpler equation (7.1) is independent of Hl.The Green’s function of (7.6) is known and can be given analytically. Assume that the iceload is localised according to
q(x, y) = ρgH(x, y) = F0 δ(x− x) δ(y − y) , (7.9)
which describes a single force F0 imposed on the lithosphere surface at the position (x, y)[δ(·) denotes Dirac’s δ function], then the solution of (7.6) is
wss(r) = −F0L2r
2πKl
kei(r
Lr
), (7.10)
with
r =√
(x− x)2 + (y − y)2, Lr =
(Kl
ρag
)1/4
(7.11)
(Brotchie and Silvester 1969). Here, kei(·) is a Kelvin function of zero order, which can bederived from the general Bessel function, and whose values are tabulated in mathematicalhandbooks [e.g., Abramowitz and Stegun (1970)]. It is plotted in Fig. 7.5. Evidently, theradius of relative stiffness, Lr, determines the non-locality of the lithosphere displacement.The Kelvin function takes the value zero at approximately r = 4Lr, followed by a slightforebulge (upward displacement) further away from the load.
The Green’s function G of the thin plate equation (7.6) is given by Eq. (7.10) with thenormalised force F0 = 1,
G(r) = G(x, x, y, y) = − L2r
2πKl
kei(r
Lr
). (7.12)
Since the differential equation (7.6) is linear, the Green’s function can be used to constructits solution for a general distribution of the ice load q(x, y) = ρgH(x, y) by superposition,
wss(x, y) =∫Aice
ρgH(x, y)G(x, x, y, y) dx dy , (7.13)
where Aice denotes the ice-covered area. Note that the Green’s function method is notrestricted to the thin plate equation; however, it can be used to solve linear, inhomogeneousdifferential equations in general [see e.g. Bronshtein et al. (2004)].
The asthenosphere component in the ELRA model is the same as in the LLRA modeldescribed above. So once the steady-state displacement wss is computed by solving thethin plate equation (7.6), the actual displacement w follows from the relaxing astheno-sphere evolution equation (7.2) as before. Also, the feedback to the ice sheet equations ofChapter 4 is as described by Eqs. (7.4) and (7.5).
93

7 Glacial Isostasy
-0.8
-0.6
-0.4
-0.2
0
-6 -4 -2 0 2 4 6
kei(r/L
) r
r/Lr
Figure 7.5: Normalised displacement of the elastic lithosphere under a point load. r/Lr isthe normalised distance from the load, kei(·) a zero-order Kelvin function.
For terrestrial conditions, a typical value for the radius of relative stiffness Lr is ∼100 km. It is much smaller than the typical horizontal extent [L] = 1000 km of a large icesheet like Antarctica or Greenland [see Eq. (4.6)], and consequently the effect of a non-local lithosphere displacement is not too pronounced. For that reason, the simpler LLRAmodel still provides reasonable results. The differences between the two models will bemost significant in regions with large ice thickness gradients, which occur, in particular,close to the ice margins. By contrast, the extent of ice caps like Vatnajokull or Austfonnais similar to Lr, so that the non-locality of the elastic lithosphere approach is essential andmust be accounted for. Glaciers are typically much smaller compared to Lr, which leads toan extreme spreading of the isostatic displacement and renders it negligible. Thus isostasyneed not be considered for glaciers.
94

References
Abramowitz, M. and I. A. Stegun. 1970. Handbook of Mathematical Functions with For-mulars, Graphs, and Mathematical Tables. Dover Publications, New York, NY, USA.
Bronshtein, I. N., K. A. Semendyayev, G. Musiol and H. Muehlig. 2004. Handbook ofMathematics. Springer, Berlin, Germany etc., 4th ed.
Brotchie, J. F. and R. Silvester. 1969. On crustal flexure. Journal of Geophysical Research,74 (22), 5240–5252.
Bueler, E. 2003. Construction of steady state solutions for isothermal shallow ice sheets.Tech. Rep. 03-02, Department of Mathematics and Statistics, University of Alaska, Fair-banks.
Bueler, E., C. S. Lingle, J. A. Kallen-Brown, D. N. Covey and L. N. Bowman. 2005.Exact solutions and verification of numerical models for isothermal ice sheets. Journalof Glaciology, 51 (173), 291–306.
Cuffey, K. M. and W. S. B. Paterson. 2010. The Physics of Glaciers. Elsevier, Amsterdam,The Netherlands etc., 4th ed. ISBN 978-0-12-369461-4.
Faria, S. H. 2003. Mechanics and thermodynamics of mixtures with continuous diversity.Doctoral thesis, Department of Mechanics, Darmstadt University of Technology, Ger-many. URL http://elib.tu-darmstadt.de/diss/000307.
Glen, J. W. 1955. The creep of polycrystalline ice. Proceedings of the Royal Society A,228 (1175), 519–538. doi:10.1098/rspa.1955.0066.
Greve, R. and H. Blatter. 2009. Dynamics of Ice Sheets and Glaciers. Springer, Berlin,Germany etc. ISBN 978-3-642-03414-5. doi:10.1007/978-3-642-03415-2.
Hooke, R. L. 2005. Principles of Glacier Mechanics. Cambridge University Press, Cam-bridge, UK and New York, NY, USA, 2nd ed.
Hutter, K. 1983. Theoretical Glaciology; Material Science of Ice and the Mechanics ofGlaciers and Ice Sheets. D. Reidel Publishing Company, Dordrecht, The Netherlands.
Hutter, K. and K. Johnk. 2004. Continuum Methods of Physical Modeling. Springer,Berlin, Germany etc.
95

References
Huybrechts, P., A. J. Payne and EISMINT Intercomparison Group. 1996. The EISMINTbenchmarks for testing ice-sheet models. Annals of Glaciology, 23, 1–12.
Liu, I.-S. 2002. Continuum Mechanics. Springer, Berlin, Germany etc.
Morland, L. W. 1984. Thermomechanical balances of ice sheet flows. Geophysical andAstrophysical Fluid Dynamics, 29, 237–266.
Morland, L. W. 1987. Unconfined ice-shelf flow. In: C. J. van der Veen and J. Oerlemans(Eds.), Dynamics of the West Antarctic Ice Sheet, pp. 99–116. D. Reidel PublishingCompany, Dordrecht, The Netherlands.
Nye, J. F. 1957. The distribution of stress and velocity in glaciers and ice sheets. Proceed-ings of the Royal Society A, 239 (1216), 113–133. doi:10.1098/rspa.1957.0026.
Paterson, W. S. B. 1994. The Physics of Glaciers. Pergamon Press, Oxford, UK etc., 3rded.
Ritz, C. 1987. Time dependent boundary conditions for calculation of temperature fieldsin ice sheets. In: E. D. Waddington and J. S. Walder (Eds.), The Physical Basis of IceSheet Modelling, IAHS Publication No. 170, pp. 207–216. IAHS Press, Wallingford, UK.
van der Veen, C. J. 1999. Fundamentals of Glacier Dynamics. A. A. Balkema, Rotterdam,The Netherlands.
van der Veen, C. J. 2013. Fundamentals of Glacier Dynamics. CRC Press, Boca Raton,FL, USA etc., 2nd ed.
Vaughan, D. G., J. C. Comiso, I. Allison, J. Carrasco, G. Kaser, R. Kwok, P. Mote,T. Murray, F. Paul, J. Ren, E. Rignot, O. Solomina, K. Steffen and T. Zhang. 2013.Observations: Cryosphere. In: T. F. Stocker, D. Qin, G.-K. Plattner, M. Tignor, S. K.Allen, J. Boschung, A. Nauels, Y. Xia, V. Bex and P. M. Midgley (Eds.), ClimateChange 2013: The Physical Science Basis. Contribution of Working Group I to theFifth Assessment Report of the Intergovernmental Panel on Climate Change, pp. 317–382. Cambridge University Press, Cambridge, UK, and New York, NY, USA.
Vialov, S. S. 1958. Regularities of glacial shields movement and the theory of plasticviscous flow. In: Physics of the Motion of Ice, IAHS Publication No. 47, pp. 266–275.IAHS Press, Wallingford, UK.
96