Embed Size (px)
Citation preview

1
Adaptive Neural Network Control of Robot basedon a Unified Objective Bound
Xiang Li, Member, IEEE, and Chien Chern Cheah, Senior Member, IEEE,
Abstract—In the conventional adaptive neural network controlof robotic manipulator, the desired position of robot end effectoris specified as a point or trajectory. In addition, it is usuallydifficult to guarantee the transient performance of adaptiveneural network control system due to the initialization errorof the weight of neural network. In this paper, a new controlformulation is proposed for the adaptive neural network controlof robotic manipulator, which unifies existing neural networkcontrol tasks such as setpoint control, trajectory tracking controland trajectory tracking control with prescribed performancebound. The proposed method also includes a new adaptive neuralnetwork control scheme where the objective for the robot endeffector can be specified as a dynamic region, instead of thedesired position or trajectory. The stability of the closed-loopsystem is analyzed by using Lyapunov-like analysis. Experimentalresults are presented to illustrate the performance of the proposedapproach and the energy-saving property of the proposed neuralnetwork controller with dynamic region.
Index Terms—Adaptive neural network, robot control, unifiedbound, performance bound.
I. INTRODUCTION
ROBOT dynamics is highly nonlinear with couplingsexisting between joints. Several model-free controllers
[1]–[3] have been developed for setpoint control of roboticmanipulator despite the nonlinearity of the dynamics. A pathtracking controller was also developed in [2], which guaranteesthe uniform ultimate boundedness of velocity error. To dealwith the trajectory tracking control problem with uncertain dy-namic parameters, much effort has been devoted to developingadaptive control schemes for robotic manipulator and muchprogress has been achieved in understanding how the robotcan deal with the dynamic uncertainty [3]–[9]. In adaptiverobot control, the convergence of task error can be guaranteedwithout the convergence of estimated parameters, and thedesired position of robot is usually specified as a setpoint ortrajectory. Instead of limiting the desired task to a position ortrajectory, the concept of task-space region control [10]–[12]where the desired objective is specified as a region was alsoproposed.
One common assumption in the robot adaptive controlis that the structure of the robot dynamics is known, andthe construction of a regressor matrix is necessary. Neuralnetwork has a well-known property that it can approximatearbitrary non-linear functions and learn through examples, andhence it allows robot control without structure assumed in the
The authors are with the School of Electrical and Electronic Engineering,Nanyang Technological University, Singapore, 639798. The work was sup-ported by the Agency For Science, Technology And Research of Singapore(A*STAR), (Reference No. 1121202014).
aforementioned adaptive control laws. Scanner and Slotine[13]–[15] developed several control strategies using variousneural networks such as Gaussian networks and dynamicallystructured networks for nonlinear system. Lewis et al. [16]–[18] proposed several adaptive neural network controllers forrobotic manipulator, where the weight of neural networks wasupdated without preliminary offline training. Some systematicapproaches for structured dynamic modeling and adaptiverobot controllers using neural network can also be foundin [19]. A feedforward adaptive controller was proposed forrobotic manipulator in [20], where the feedforward signalwas constituted by outputs of a set of fixed multilayer neuralnetworks. A neuro controller was developed for robotic ma-nipulator in [21], which consisted of a set of off-line trainedneural networks to deal with uncertain robot dynamics andpayload. An adaptive output feedback control method wasproposed for flexible-joint robots in [22], where an observerusing neural networks was introduced to eliminate the require-ment of velocity measurement. In [23], the neural-networktechnique was employed to compensate the uncertainties inthe manipulator dynamics and actuator model. In [24], anadaptive neural network Jacobian controller was developed formultifingered robot hands with uncertain kinematics, Jacobianmatrices and dynamics. An adaptive neural network controllerwas developed for robot interacting with a viscoelastic envi-ronment in [25]. An adaptive neural network control approachwas introduced for contouring control of manipulator in [26].
The main advantage of the adaptive neural network controlis that the stability and convergence can be ensured withoutpreliminary offline training. The weight of neural networkis adjusted online by an update law but it is usually hardto initialize the weight. The initialization error affects thetransient response of the adaptive neural network controlsystem, which may degrade the performance of system oreven compromise the safety of users. To solve the problem,an adaptive controller with prescribed performance [27] wasrecently proposed to guarantee the transient response of robotsystems.
Existing adaptive neural network control methods forrobotic manipulator are focusing on setpoint or tracking con-trol, where the desired position of robot end effector is alwaysspecified as a point or trajectory, and the position errors areused to drive the end effector towards the desired position. Inthis paper, a new adaptive neural network control formulationis proposed for robotic manipulator, where the objective for therobot end effector can be specified as a unified bound. The uni-fied bound is a general objective function for various roboticmanipulation tasks. When the bound is specified arbitrarily

2
small, it reduces to the conventional setpoint or trajectory.When the bound is specified as the performance bound, thetransient and steady-state response of closed-loop system canbe guaranteed. It can also be specified as a general dynamicregion that can be scaled or rotated to provide flexibility forthe specification of robot tasks. Thus the proposed methodalso includes a new adaptive neural network control schemewith dynamic region. The convergence to the unified bound isproved by using Lyapunov-like analysis. Experimental resultsare presented to illustrate the performance of the proposedapproach and the energy-saving property of the proposedneural network controller with the dynamic region.
II. BACKGROUND
A. Robot Kinematics and Dynamics
Let x = [x1, · · · , xm]T ∈ �m denotes the position of theend effector in task space, and q = [q1, · · · , qn]T ∈ �n is avector of joint angles. The velocity of the end effector in taskspace x is related to the joint-space velocity q as:
x = J(q)q, (1)
where J(q)∈�m×n is the Jacobian matrix from joint spaceto task space. The dynamics of the robotic manipulator isdescribed as:
M(q)q + [12M (q) + S(q, q)]q + g(q) = τ , (2)
where M(q)∈�n×n is an inertia matrix which is symmetricand positive definite, S(q, q) ∈ �n×n is a skew-symmetricmatrix, g(q)∈�n denotes a vector of gravitational force, andτ∈�n denotes a vector of control input.
B. Neural Networks
An important property of neural networks is the ability toapproximate an arbitrary nonlinear function up to a small error.In order to represent the function, an approximating function ischosen first, then the weights are updated based on the outputerrors. In this paper, the radial basis function (RBF) networkis used to approximate the uncertainties in the dynamic modelof robot and the weights of neural network are adjusted onlinewithout previous learning phase.
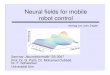
The structure of a RBF neural network is shown in Fig. 1. Inthe RBF neural network, p=[p1, · · · , pnp ]T∈�np is the inputof the network, and h(p) is the output, and θ=[θ1, · · · , θna ]T∈�na is the activation function, where θi(i = 1, · · · , na) arespecified as:
θi = e−||p−µi||2
σ2i , (3)
where μi = [μi1, · · · , μinp ]T ∈ �np is called the center, andσ =[σ1, · · · , σna ]T ∈�na is called the distance and σi > 0.From Fig. 1, the function approximation using a RBF neuralnetwork is:
h(p) = Wθ(p) + E, (4)
where W is the weight matrix, and E is called neural net-work functional approximation error, and the error generallydecreases when the number of neurons increases.
Inputs
Outputs
Input Layer Output Layer
Radial BasisFunctions
θ1
θ2
θ3
θn a
p h
Fig. 1. A RBF neural network.
III. UNIFIED BOUND
In this paper, the objective for the robot end effector isspecified as a unified bound instead of a setpoint or trajectory,to suit different applications of robotic manipulation.
A. Dynamic Region
When the unified bound is specified as a dynamic region,the desired region can be scaled and rotated to allow flexibilityfor robot movement. The dynamic region is described by thefollowing inequality functions:
f(ΔxT ) = [f1(ΔxT ), · · · , fM (ΔxT )]T ≤ 0, (5)
where M is the total number of objective functions. Thevariable ΔxT in equation (5) is defined as:
ΔxT = T (x−xf) = TΔx, (6)
where T is a transformation matrix, xf =[xf1, · · · , xfm]T ∈�m is a reference position, and Δx = x−xf represents theposition error with respect to the reference position. As seenfrom equation (6), ΔxT is a product of the transformation ma-trix T and the position error Δx, which provides directionalinformation towards the time-varying dynamic region.
The vector inequality f(ΔxT)≤0 implies that fi(ΔxT )≤0for all i = 1, · · · , M . The functions fi(ΔxT ) are scalarfunctions with continuous partial derivatives, and f i(ΔxT )specifies a moving region where the reference position x f
is time-varying.The transformation matrix T should be specified such that
the inverse matrix T−1 exists. In addition, it can be specifiedas a scaling matrix or a rotation matrix according to specificrobot tasks. For example, T can be specified as a scalingmatrix in 3-D space as:
T = S =
⎡⎣
1S1
0 00 1
S20
0 0 1S3
⎤⎦ , (7)
where Si(t)(i = 1, 2, 3) are positive scaling factors, and S isa symmetric nonsingular matrix. Therefore, we have:
ΔxT = T
⎡⎣x1 − xf1
x2 − xf2
x3 − xf3
⎤⎦ =
⎡⎣
x1−xf1S1
x2−xf2S2
x3−xf3S3
⎤⎦ . (8)

3
Various dynamic regions such as sphere, cube, cylinderetc. can be formed by choosing the appropriate functions andusing the scaling matrix in equation (7). For example, whenthe desired region is specified as a cube in 3-D space, theinequality functions in equation (5) can be specified as:
f1(ΔxT ) = (x1−xf1)2
(S1b1)2 − 1 ≤ 0,
f2(ΔxT ) = (x2−xf2)2
(S2b2)2 − 1 ≤ 0,
f3(ΔxT ) = (x3−xf3)2
(S3b3)2 − 1 ≤ 0, (9)
where bi(i = 1, 2, 3) are the individual regional bounds foreach axis. When the desired region is designed as a sphere,the inequality function in equation (5) can be specified as:
f(ΔxT ) = (x1−xf1)2
(S1r)2 + (x2−xf2)2
(S2r)2 + (x3−xf3)2
(S3r)2 − 1 ≤ 0, (10)
where r is the radius of the sphere, and S1 = S2 = S3 = S.The size of the region increases as the factors Si(i = 1, 2, 3)increase, and vice versa.
The transformation matrix T can also be specified as arotation matrix or a composite rotation matrix. For example:
T=R=
⎡⎣cosφ −sinφ 0sinφ cosφ 0
0 0 1
⎤⎦
⎡⎣ 1 0 0
0 cosϕ −sinϕ0 sinϕ cosϕ
⎤⎦ , (11)
where φ(t) and ϕ(t) are rotation angles.In addition, the transformation matrix T can be specified
as the product of the scaling matrix and the rotation matrix:T = RS, so as to allow the desired region to be scaled androtated simultaneously. Some examples of dynamic regions areillustrated in Fig. 2.
( )b
( )a
T
T
Fig. 2. Dynamic regions before and after scaling and rotation.
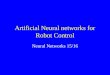
Therefore, the size of the dynamic region can be varied byspecifying the transformation matrix. In an application wherethe high precision is required, it is possible to define theregion arbitrarily small. When the precision is not critical, theregion could be scaled up to provide more flexibility in taskspecifications. Fig. 3 illustrates a scenario of manipulation byusing the dynamic region.
B. Performance Bound
It is known that the initialization error of weight of neuralnetwork may affect the transient performance of robot system.To solve the problem, the concept of prescribed performancehas been proposed in [27]–[30] to guarantee the transientresponse of closed-loop system. In this paper, the unifiedbound can also be formulated as a performance bound, suchthat the transient and steady-state response of closed-loopsystem is guaranteed when the end effector stays inside theperformance bound.
When the unified bound is specified as the performancebound, the function fi(ΔxT ) denotes the bound in the ith
coordinate. As the performance bound shrinks to a boundaround the reference position xf , the tracking error Δx =x−xf reduces correspondingly. Therefore, the variation of thetracking error is related with the variation of the performancebound, and the transformation matrix T and the specific formof the function fi(ΔxT ) determine the different transientperformance of closed-loop system.
For example, when a transient response with an allowablemaximum overshoot as illustrated in Fig. 4.(a) is required, theregion function fi(ΔxT ) can be specified as:
fi(ΔxT ) = Δx2Ti
b2i
− 1 ≤ 0, (12)
where
bi ={
bci, xi ≥xfi,−Mpbci, xi <xfi,
(13)
where 0<Mp<1 is the allowable overshoot, bi denote the posi-tions of boundaries, and bci are constants. The transformationmatrix T is specified as a m × m matrix as:
T =
⎡⎢⎢⎣
1ess
Mpbc1+e−lct · · · 0...
. . ....
0 · · · 1ess
Mpbcm+e−lct
⎤⎥⎥⎦ , (14)
where lc represents the convergence speed of bounds, and e ss
represents the steady-state error. From equations (13) and (14),the initial upper bounds are obtained as: bmax = bci+ ess
Mp, and
the initial lower bounds are obtained as: bmin = −Mpbci−ess.The initial position of the end effector is either measured
with the sensory feedback, or computed from the forwardkinematic equations by using the initial joint configurationsmeasured from encoders. After the initial position is deter-mined, the initial upper and lower bounds can be set to enclosethe initial position with respect to the reference position, suchthat the end effector is initially inside the performance boundas illustrated in Fig. 4.
When a transient response without overshoot as illustratedin Fig. 4.(b) is required, fi(ΔxT ) is specified as:
fi(ΔxT )=
[ Δx2Ti
b2ui
− 1
1 − Δx2Ti
b2li
]≤0, (15)
where bui and bli are constants. The transformation matrix T

4
Desired object
Manipulator
Initial region
(a) The initial region is small.
ManipulatorFinal region
(b) The final region is large.
Region boundary
0 t
Bound
Tracking error
minb
maxb
ObjectGrasping
(c) Dynamic bound of tracking error.
Fig. 3. A scenario of robotic manipulation by using a scaling dynamic region: (a) The region is set small such that the end effector can exactly grasp thedesired object on a table; (b) After the object has been grasped, the dynamic region is then scaled up such that the end effector can place the object at anyposition on another table.
is specified as:
T =
⎡⎢⎢⎣
1essbl1
+e−lct · · · 0...
. . ....
0 · · · 1essblm
+e−lct
⎤⎥⎥⎦ . (16)
From equations (15) and (16), the initial upper bounds areobtained as: bmax = bui+ess
bui
bli, and the initial lower bounds
are obtained as: bmin = bli + ess. Similarly, the upper andlower bounds are set such that the end effector is inside theperformance bound from the beginning and stays within it.The overshoot is eliminated when the end effector is restrictedwhere fi(ΔxT ) ≤ 0. As the performance bound shrinks, theend effector is driven towards the reference position.
t0
0t
minb
( )a
( )b
maxb
maxb
minb
Bound
Bound
Region boundary
Tracking error
Region boundary
Tracking error
Fig. 4. An illustration of transient response: (a) with allowable maximumovershoot; (b) without overshoot.
As seen from section III.A-III.B, the proposed unified boundis a generalization of setpoint, trajectory, performance bound,and dynamic region. The specifications of the bound accordingto various objectives are summarized as follows:(i) When the bound is specified arbitrarily small and the
reference position is the desired constant point (xf = 0), itreduces to a setpoint;(ii) When the bound is specified arbitrarily small and thereference position is time-varying (xf �= 0), it reduces to atrajectory;(iii) When the dynamic region is specified to enclose the initialerror, the desired transient performance can be guaranteed.Remark 1: The prescribed performance is defined specificallyto guarantee the transient and steady-state response of acontrol system, while the dynamic region is more generaland flexible. It can be rotated, scaled up and down to ensureaccuracy and allow flexibility of the task. It can also bespecified as the conventional setpoint or trajectory to suitdifferent robotic manipulation tasks. If the dynamic regionis specified to enclose the initial error and the end effectoris controlled to stay inside the region throughout the robotmovement, the prescribed performance of the control systemis also guaranteed. ���
C. Potential Energy
The potential energy function for the unified bound isproposed as:
P (ΔxT ) =M∑i=1
Pi(ΔxT ), (17)
where
Pi(ΔxT ) = kxi
2 [max(0, fi(ΔxT ))]2. (18)
That is,
Pi(ΔxT ) ={
0, fi(ΔxT ) ≤ 0,kxi
2 [fi(ΔxT )]2, fi(ΔxT ) > 0,(19)
where kxi are positive constants. The above energy functionis smooth and lower bounded by zero.
Partial differentiating the potential energy function de-scribed by (18) with respect to ΔxT yields:
(∂Pi(ΔxT )∂ΔxT
)T ={
0, fi(ΔxT )≤0,
kxifi(ΔxT )(∂fi(ΔxT )∂ΔxT
)T , fi(ΔxT )>0.(20)
From equation (17), we have(∂P (ΔxT )
∂ΔxT
)T
=M∑i=1
(∂Pi(ΔxT )
∂ΔxT
)T
=M∑i=1
kximax(0, fi(ΔxT ))(
∂fi(ΔxT )∂ΔxT
)T
, (21)

5
which denotes the gradient of the potential energy. When theend effector enters the bound, f i(ΔxT )<0, and the gradientautomatically reduces to zero, as illustrated in Fig. 5.
Bound
0 t
Error
Fig. 5. The gradient is nonzero when the end effector is outside the bound,and it automatically reduces to zero after the end effector enters the bound.
It is intuitive that reaching for bounds instead of setpointor trajectory would allow more flexibility in robot tasks. Infact, the potential energy Pi(ΔxT ) remains zero if the endeffector starts from an initial position within the bound andstays inside the bound where fi(ΔxT )<0. Comparatively, thepotential energy using the conventional position error Δx isnonzero until the end effector reaches the reference positionxf . Fig. 6 illustrates the variation of potential energy P i(ΔxT )as the desired bound shrinks. In Fig. 6, P i(ΔxT ) is zero whenthe end effector is inside the desired bound, and the bottomof Pi(ΔxT ) shrinks to a point as the bound is scaled down.
When the unified bound is specified as a performancebound, the potential energy should be specified with an ar-bitrarily large gradient to keep the position error within theperformance bound. To fulfill the requirement, a high-orderpotential energy Ph(ΔxT ) is introduced as:
Ph(ΔxT ) =M∑i=1
khi
N [max(0, fi(ΔxT ))]N , (22)
where khi are positive constants, and N≥10 is the order of thefunction which is also an even integer. The potential energy isthen the combination of Ph(ΔxT ) and the original potentialenergy P (ΔxT ) as:
Pc(ΔxT ) = Ph(ΔxT ) + P (ΔxT ), (23)
where Pc(ΔxT ) represents the new potential energy. Anillustration of Pc(ΔxT ) is shown in Fig. 7(a). Note that theparameters kxi and khi in equation (23) are set large to createthe steep gradient.
The steep gradient of Pc(ΔxT ) may cause the oscillationof robot movement when the end effector is very near theboundary of the performance bound. To alleviate the problem,another potential energy function with a smaller referencebound can be introduced as:
Pr(ΔxT ) =M∑i=1
kri
2 [max(0, fri(ΔxT ))]2, (24)
where kri are positive constants, and fri(ΔxT ) ≤ 0 is thereference bound which is inside fi(ΔxT )≤0. The parameterskri are not large and thus the gradient of Pr(ΔxT ) is smaller.
Therefore, the overall potential energy can be proposed as thesummation of Pr(ΔxT ) and Pc(ΔxT ) as:
Po(ΔxT ) = Pc(ΔxT ) + Pr(ΔxT ), (25)
where Po(ΔxT ) represents the overall potential energy. Anillustration of Po(ΔxT ) is shown in Fig. 7(b). If the end ef-fector moves beyond the reference region where f ri(ΔxT )>0,the gradient of Pr(ΔxT ) becomes nonzero and drives the endeffector back from the steep gradient. The reference regionis hence introduced to reduce the possibility of oscillation inactual implementations. Note that the use of reference regionis optional.
−3 −2 −1 0 1 2 30
1
2
3
4
5
Δ xT
Pot
entia
l ene
rgy
f(Δ xT)≤ 0
(a) Pc(ΔxT ) (without fri(ΔxT ))
−3 −2 −1 0 1 2 30
1
2
3
4
5
Δ xT
Pot
entia
l ene
rgy 1.9998 1.9999
2
8x 10
6
fr(Δ x
T)≤ 0
f(Δ xT)≤ 0
(b) Po(ΔxT ) (with fri(ΔxT ))
Fig. 7. Examples of potential energy functions with or without the referenceregion. Both Pc(ΔxT ) and Po(ΔxT ) are smooth and lower-bounded byzero, and the gradient of the potential energy Pr(ΔxT ) for the referenceregion becomes nonzero when the end effector moves beyond the referenceregion, so as to drive it back from the steep gradient.
Since the concept of the neural network control with theunified bound is general, it is also possible to formulate otherpotential energy functions with steep gradient, to keep thetracking errors inside the performance bound. For example,another potential energy function for the performance boundcan be specified as:
Po(ΔxT ) =M∑i=1
kxi
2[max(0,fri(ΔxT )]2
[fi(ΔxT )]2 , (26)
where an illustration of the potential energy Po(ΔxT ) inequation (26) is shown in Fig. 8. Since the initial boundencloses the initial error such that fri(ΔxT ) < 0, the initialpotential energy is zero. When the end effector is very nearthe boundary where fi(ΔxT )=0, the gradient of the potentialenergy becomes very large.
Similarly, partial differentiating Po(ΔxT ) with respect toΔxT yields: (
∂Po(ΔxT )∂ΔxT
)T �=Δε, (27)
where Δε denotes a unified region error which is also thegradient of Po(ΔxT ). When the unified bound is not specifiedas the performance bound, khi and kri are set as zero, and Δεsmoothly transits from nonzero to zero after the end effectorenters the bound. When the unified bound is specified as theperformance bound, kxi and khi are set large while kri can beset small, and Δε becomes arbitrarily large if the end effectoris outside the performance bound. The parameters of the regionerror are selected according to the specific bound as shown inTable I.

6
(a) t = 0 (b) t > 0 (c) t → ∞
Fig. 6. The bottom of potential energy corresponds to the bound. As the bound shrinks, the bottom of potential energy converges to the desired position.
TABLE IPARAMETER SELECTION OF UNIFIED REGION ERROR
TYPE SIZE OF BOUND INITIAL BOUND xf T kxi khi
Setpoint arbitrarily small not required desired point identity matrix nonzero zeroTrajectory arbitrarily small not required desired trajectory identity matrix nonzero zero
Static region nonzero not required constant position constant nonzero zeroand constant inside region
Dynamic region time-varying not required time-varying position scaling or nonzero zeroinside region rotation matrix
Performance from initial bound enclosing initial constant or based on transient arbitrarily largebound to small bound position error time-varying requirement large
−3 −2 −1 0 1 2 30
1
2
3
4
5
Δ xT
Pot
entia
l ene
rgy 1.9998 1.9999
2
8x 10
6
f(Δ xT)≤ 0
Fig. 8. An illustration of Po(ΔxT ). The potential energy is smooth andlower-bounded by zero, and the gradient of the potential energy becomes steepat the boundary of the performance bound.
IV. ADAPTIVE NEURAL NETWORK CONTROL
In this section, we propose a new adaptive neural networkcontroller. The desired objective is specified as a unifiedbound to provide flexibility in robot tasks. When the boundis specified arbitrarily small, the control objective reduces tothe conventional trajectory tracking control. When the unifiedbound is specified as a performance bound, the transientresponse of the robot system is guaranteed.
The proposed controller is specified as:
τ =−Kss−JT (q)T T Δε
−kgsgn(s)+Wdθd(q,q,xf ,xf ,xf ), (28)
where s is a sliding vector which is introduced as:
s = q − qr
= q−J+(q)(xf −T−1 ˙TΔx)+αJ+(q)T−1Δε, (29)
and qr is a reference vector, J+(q) denotes the pseudo-inverseof J(q), α is a positive constant, Ks is a diagonal and positivedefinite matrix, kg is a positive constant, and sgn(·) representsthe sign function.
In equation (28), θd(q,q,xf ,xf ,xf ) is the vector of acti-vation function, and Wd is the estimated weight matrix ofa RBF neural network that will be employed to approximatethe dynamic model of the robotic manipulator. The estimatedweight matrix Wd is updated by the following update law:
˙W
T
dj = −L−1dj θd(q,q,xf ,xf ,xf )sj , (30)
where Wdj represents the jth row vector of Wd, sj is the jth
element of s, and Ldj are diagonal positive definite matrices.Using the sliding vector s defined by equation (29), the
robot dynamics described by equation (2) is written as:
M(q)s+[12M(q)+S(q, q)]s
+M(q)qr +[12M(q)+S(q, q)]qr +g(q)=τ , (31)
and the term M(q)qr + [12M (q) + S(q, q)]qr + g(q) isapproximated by the RBF neural network as:
M(q)qr +[12M(q)+S(q, q)]qr +g(q)= Wdθd(q,q,xf ,xf ,xf )+Ed, (32)
where Wd is the ideal weight matrix, and Ed is the vector ofapproximation error. Substituting equations (28) and (32) intoequation (31), we obtain the following closed-loop equation:
M(q)s+[12M (q)+S(q, q)]s+Kss
+JT (q)T T Δε+kgsgn(s)+ΔWdθd(q,q,xf ,xf ,xf )+Ed =0, (33)

7
where ΔWd=Wd−Wd, and ΔWd(0) represents the initializa-tion error at t=0. The initial estimates of the weights Wd(0)can be set as zero. Note that the neural-network compensationof the dynamics reduces to zero when the weights are setas zero when t = 0, but the feedback term in the proposedcontroller will keep the tracking errors bounded. The algorithmfor the proposed controller is given in Algorithm 1.
Algorithm 1 Adaptive NN Control with A Unified BoundSpecify the type of the bound according to robot tasks;Specify the parameters of the bound according to Table I;Initialize the weight of neural network Wd(0);Set the parameters kg , Ks, Ldj , and α;for The task is not completed do
Calculate the activation functions θi in equation (3);Calculate the sliding vector s in equation (29);Apply the control input τ using equation (28);Update the estimated weight Wd using equation (30);
end for
To prove the stability of the robot system, a Lyapunov-likecandidate is defined as:
V = 12sTM(q)s+Po(ΔxT )+ 1
2
n∑j=1
ΔWdjLdjΔW Tdj .(34)
Next, differentiating V with respect to time, we have:
V =sTM(q)s+ 12sTM (q)s+ ( ˙TΔx+TΔx)T Δε
−n∑
j=1
˙W djLdjΔW T
dj . (35)
Substituting the closed-loop equation (33), the sliding vector inequation (29) and the update law in equation (30) into equation(35) and using the properties of robot dynamics, we have:
V =−sTKss−sT {JT (q)T T Δε+kgsgn(s)+ΔWdθd(q,q,xf ,xf ,xf)+Ed}
+( ˙TΔx+TΔx)T Δε−n∑
j=1
˙W djLdjΔW T
dj
= −sTKss−sTEd−kgsTsgn(s)−αΔεTΔε. (36)
Note that −sTEd − kgsTsgn(s) ≤ −(kg − bd)||s|| where bd
denotes the upper bound of Ed. Therefore, if the controlparameter kg is set such that
kg > bd, (37)
it is obtained that:
V ≤−sTKss−αΔεTΔε≤0. (38)
Since the error Ed for the ideal weight Wd can be reducedby choosing sufficient neurons [31], kg is chosen sufficientlylarge to satisfy condition (37). We now state the followingtheorem.Theorem 1: When the proposed control scheme and theupdate law in equations (28) and (30) are applied to roboticmanipulator, the closed-loop system is stable and gives rise tothe convergence of the task-space position of the end effectorto the unified bound, if the control parameter kg is chosen
sufficiently large such that condition (37) is satisfied.Proof: If condition (37) is satisfied, V >0 and V ≤0. Therefore,V is bounded. Since V is bounded, s, Po(ΔxT ), and ΔWd
are all bounded. The boundedness of Po(ΔxT ) ensures theboundedness of the functions fi(ΔxT ). Therefore, Δx is alsobounded. Since s, Δx, and ΔWd are all bounded, the closed-loop system is stable.
In addition, the boundedness of Δx ensures the bounded-ness of x since xf is bounded. Since the functions fi(ΔxT )are specified as scalar functions with continuous partial deriva-tives, the boundedness of x, Δx ensures the boundedness ofthe partial derivatives. Since both the functions of bound andits partial derivatives are bounded, the unified region error Δεis bounded as seen from equation (27).
The boundedness of Δε ensures the boundedness of qr.Since both s and qr are bounded and s=q−qr, q is bounded.The boundedness of q also ensures the boundedness of xsince x=J(q)q and J(q) are trigonometric functions of q.The boundedness of x ensures the boundedness of the timederivative of the region error Δ ε, which implies that Δε isuniformly continuous. From equation (38), it is obtained thats, Δε ∈ L2(0, +∞) [3], [32]. Then it follows [3], [33], [34]such that:
Δε → 0, (39)
which implies that f(ΔxT ) ≤ 0 or x → xf . In either case,the end effector is inside the unified bound.
1) : When the unified bound is not specified as the per-formance bound, the end effector can start outside the boundduring transient stage and it has been shown that the positionof the end effector converges to the desired bound at steadystate.
2) : When the unified bound is specified as the performancebound, the performance bound encloses the initial positionerror such that the initial region error Δε(0) = 0. Supposethat the end effector exceeds the performance bound at a timeinstant where fi(ΔxT )>0, Δε becomes arbitrarily large (seeFig. 7 and Fig. 8), which is contradicted with the conclusionthat the region error Δε is continuous and bounded throughoutthe robot movement. Therefore, the end effector always staysinside the performance bound. ���Remark 2: Since the end effector starts inside the performancebound and stays within it, the performance bound couldbe set to ensure that the robot is away from the singularconfigurations so that J+(q) is non-singular. ���Remark 3: The proposed controller is different from thesetpoint controller. In robot setpoint control, the controllerrequires specific positions of desired points, and hence eachdesired point has to be determined exactly. In this paper, therobot end effector is controlled to track a unified bound, andthe position of the end effector converges to any point insidethe bound and not necessarily the reference point. ���
V. EXPERIMENT
The proposed control scheme was implemented on the firsttwo joints of a SCARA robot, where the lengths of the firstand the second link are l1 =0.35 m, l2 =0.33 m respectively.The experimental setup [35] was shown in Fig. 9.

8
The joint motors of the robot are driven by servo amplifiers.The amplifiers are connected to a ServoToGo I/O card (modelII). The servo I/O card is an ISA-bus based general purposedata acquisition card. The optical incremental encoders in therobot monitor the joint positions with a resolution of 500lines. Joint velocities are obtained from differentiation of thejoint angles. The 24-bit counters of the card are read bya computer serving as the controller in which one PentiumIII 450 MHz processor and 128 MB DRAM are installed.The control signals are fed through the digital-to-analogueconverters of the servo I/O card to the amplifiers. The digital-to-analog converters have a 13-bit resolution and the outputvoltage has a −10 volt to +10 volt range.
Fig. 9. Experimental setup
A. Moving Region
In the first experiment, a moving circular region was for-mulated as the desired position of robot end effector, and theregion function in equation (5) was specified as:
f(ΔxT ) = Δx2T1
0.052 + Δx2T2
0.052 − 1 ≤ 0, (40)
and the transformation matrix was set as T = I2 where I2 ∈�2×2 is an identity matrix, and hence the size of the regionwas constant. The end effector started from an initial positionat (−0.25, 0.09) m and tracked the moving circular region,where the trajectory of the reference position (xf1, xf2) wasspecified as:{
xf1 = −0.35 + 0.15cos(0.4t) mxf2 = 0.10 + 0.15sin(0.4t) m.
(41)
The control parameters in equation (28) were set as: α = 1,kxi = 1, Ks = diag{0.0002, 0.0002}. The input of the neuralnetwork was specified as: p = [q, q, xf , xf , xf ]T ∈ �10. Tenneurons were utilized in the neural network, and the center andthe width of the activation functions were set as: μj1 = 1.104,μj2 = −1.057, μj3 = 0, μj4 = 0, μj5 = −0.2, μj6 = 0.1,μj7 = 0, μj8 = 0, μj9 = 0, μj10 = 0 and σj = 10 wherej = 1, · · · , 10. The parameters for the update law in equation(30) were set as: Ld = 0.0001I10 where I10 ∈ �10×10 isan identity matrix, and the weights of neural network wereinitialized as Wd(0)=0.
The path of the robot end effector and the tracking errorsare shown in Fig. 10 and Fig. 11(a) respectively. As seenfrom Fig. 10 and Fig. 11(a), the end effector is able to trackthe moving circular region. The input torques are shown in
Fig. 11(b). In the experiment, the number of the neurons issufficient to approximate the robot dynamics with negligibleerror, and hence the control term −kgsgn(s) is not required.That is, the control parameter kg is set as zero.
B. Dynamic Region
In the second experiment, a dynamic region described byequation (5) was specified as the desired position of robot endeffector as:
f(ΔxT ) = Δx2T1
r2 + Δx2T2
r2 − 1 ≤ 0, (42)
where r = 0.6 m represents the initial radius of the circularregion, and the transformation matrix T was specified as:
T =[ 1
0.03+e−0.4t 00 1
0.03+e−0.4t
]. (43)
That is, the dynamic region is initially large and scaleddown in the end. The end effector started from the initialposition at (−0.11, 0.64) m and tracked the shrinking region.The trajectory of the reference position (xf1, xf2) was nowspecified as a lemniscate of Bernoulli as:{
xf1 = −0.3 + 0.1cos(0.5t)1+sin2(0.5t) m
xf2 = 0.1 + 0.1sin(0.5t)cos(0.5t)1+sin2(0.5t) m.
(44)
The control parameters in equation (28) were set as: α = 1,kxi = 0.01, and Ks = diag{0.5, 0.5}. The input of the neuralnetwork was specified as: p = [q, q, xf , xf , xf ]T ∈ �10. Tenneurons were utilized in the neural network, and the center andthe width of the activation functions were set as: μj1 = 1.104,μj2 = −1.057, μj3 = 0, μj4 = 0, μj5 = −0.2, μj6 = 0.1,μj7 = 0, μj8 = 0, μj9 = 0, μj10 = 0 and σj = 10 wherej = 1, · · · , 10. The parameters for the update law in equation(30) were set as: Ld = 0.0001I10, and the weights of neuralnetwork were initialized as Wd(0)=0.
The tracking errors are shown in Fig. 11(c). As seen fromFig. 11(c), the tracking errors are within the bounds of thedynamic region, and the position of end effector converges tothe reference trajectory as the region is scaled down. The inputtorques are shown in Fig. 11(d). The input torques increasewhen the robot end effector is near the sharp curvature ofBernoulli trajectory, so as to keep the end effector followingthe dynamic region.
The path of the robot end effector is shown in Fig. 12.As seen from Fig. 12, the end effector starts from an initialposition inside the dynamic region and stays within it. Initially,the region is large so that less control effort is required. As thesize of the region is scaled down, the dynamic region reducesto the Bernoulli trajectory, and the position of end effectoralso converges to the desired trajectory.
Next, the reference position was specified as a setpoint asxf =[−0.3, 0.1]T m, while the control parameters remain thesame. The end effector was controlled to start from the sameinitial position and track the shrinking region. The path of therobot end effector and the position errors are shown in Fig. 13.As the size of the region is scaled down, the dynamic regionreduces to the setpoint, and the position of the end effectoralso converges to the desired point, as seen from Fig. 13.

9
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
actualdesiredregion boundaries
Moving region
(a) t=0 s
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
actualdesiredregion boundaries
Moving region
(b) t=3.2 s
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
actualdesiredregion boundaries
Moving region
(c) t=24.5 s
Fig. 10. Experiment 1: the robot end effector is controlled to track the moving circular region.
0 5 10 15 20
−0.4
−0.2
0
0.2
0.4
0.6
time (s)
Err
or (
m)
x1
x2
boundaries
(a) Tracking errors for moving region
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time (s)
Tor
que
(Nm
)
Joint1Joint2
(b) Input torques for moving region
0 5 10 15 20 25 30
−0.4
−0.2
0
0.2
0.4
0.6
time (s)
Err
or (
m)
x1
x2
bound
(c) Tracking errors for dynamic region
0 5 10 15 20 25 30−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time (s)
Tor
que
(Nm
)
Joint1Joint2
(d) Input torques for dynamic region
Fig. 11. Region tracking control
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
actualbounddesired
initial position of end effector
desired trajectory
initial region
(a) t=0 s
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
actualbounddesired
dynamic region
(b) t=3.8 s
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
desiredboundactual
dynamic region
(c) t=30.4 s
Fig. 12. Experiment 2: the dynamic region is reduced to a Bernoulli trajectory.
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
desiredboundactual
initial position ofend effector
Initial region
desired position
(a) t=0 s
−1 −0.5 0 0.5
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x1(m)
x 2 (m
)
desiredboundactual
dynamic region
(b) t=12.5 s
0 2 4 6 8 10 12
−0.4
−0.2
0
0.2
0.4
0.6
time (s)
Err
or (
m)
x1
x2
bound
(c) Position errors
Fig. 13. Experiment 2: the dynamic region is reduced to a setpoint.

10
C. Performance Bound
In the third experiment, the unified bound was specifiedas performance bound. First, a performance bound with anallowable maximum overshoot in equation (12) was specifiedas:
f1(ΔxT1) = Δx2T1
b21− 1 ≤ 0,
f2(ΔxT2) = Δx2T2
b22− 1 ≤ 0, (45)
where
b1 ={
0.3 m, x1 ≥ xf1,−0.1 m, x1 < xf1,
b2 ={
0.6 m, x2 ≥ xf2,−0.2 m, x2 < xf2,
(46)
and the transformation matrix T was specified as:
T =[ 1
0.04+e−0.4t 00 1
0.03+e−0.4t
]. (47)
From equations (13) and (14), the performance of the tran-sient response can be obtained as: the allowable maximumovershoot Mp = 1
3 , the convergence speed lc = 0.4, and thesteady-state error ess = −0.004 m in the coordinate of x1 andess = −0.006 m in the coordinate of x2.
Next, another performance bound without overshoot inequation (15) was specified as:
f1(ΔxT1)=[ Δx2
T10.32 − 1
1 − Δx2T1
0.052
]≤0,
f2(ΔxT2)=[ Δx2
T20.752 − 11 − Δx2
T20.452
]≤0, (48)
and the transformation matrix was the same. Reference regionswere introduced to reduce the possibility of oscillation. For theperformance bound in equation (45), the reference region wasspecified as: fr1(ΔxT1)=Δx2
T1/b2r1−1≤0, and fr2(ΔxT2)=
Δx2T2/b2
r2−1≤0, where br1 =0.2 m if x1≥xf1 else br1 =−0.01 m, and br2=0.4 m if x2≥xf2 else br2=−0.02 m. Forthe performance bound in equation (48), the reference regionwas specified as: fr1(ΔxT1)=
[Δx2
T10.22 − 1, 1 − Δx2
T10.152
]T ≤0,
and fr2(ΔxT2)=[
Δx2T2
0.62 − 1, 1 − Δx2T2
0.52
]T ≤0.The end effector started from the same initial position at
(−0.11, 0.64) m and stayed inside the performance boundsdescribed by equations (45) and (48) respectively. The trajec-tory of the reference position (xf1, xf2) was set as:{
xf1 = −0.2 − 0.005t mxf2 = 0.3 − 0.005t m.
(49)
When the performance bound in equation (45) was employed,the control parameters in equation (28) were set as: α = 1,kxi = 100, and Ks = diag{0.7, 0.7}. When the performancebound in equation (48) was employed, the control parameterswere set as: α = 1, kxi = 100, and Ks = diag{1.5, 1.5}.The input of the RBF neural network was specified as: p =[q, q, xf , xf , xf ]T ∈ �10. Ten neurons were utilized in theneural network, and the center and the width of the activationfunctions were set as: μj1 = 1.104, μj2 = −1.057, μj3 =0, μj4 = 0, μj5 = 0.18, μj6 = 0.3, μj7 = 0, μj8 = 0,
μj9 = 0, μj10 = 0 and σj = 10 where j = 1, · · · , 10. Theparameters for the update law in equation (30) were set as:Ld = 0.0001I10, and the weights of neural network wereinitialized as Wd(0)=0.
The transient responses of the closed-loop system is shownin Fig. 14(a) and Fig. 14(c) respectively. As seen from Fig.14(a) and Fig. 14(c), the end effector starts inside the perfor-mance bound and stays within it. As the bound shrinks, thetracking errors reduce accordingly. Note that the overshootsare eliminated in Fig. 14(a) and Fig. 14(c). This is becausethe transient response is guaranteed when the tracking errorsare bounded inside the performance bound. The input torquesare shown in Fig. 14(b) and Fig. 14(d). Similarly, the controlparameter kg is set as zero since the number of the neurons issufficient to approximate the robot dynamics with negligibleerror.
D. Energy-Saving Property
In the proposed control method, the gradient of the potentialenergy remains zero when the end effector starts from an initialposition within the unified bound and stays inside the boundthroughout the robot movement. Comparatively, the positionerror Δx in the standard adaptive neural network controller isnonzero until the end effector reaches the reference position.Therefore, using the unified bound requires less energy thanusing the conventional position error.
In the fourth experiment, the energy-saving property of theproposed control method is verified. To monitor the energyconsumption, the voltage across the DC motor was recorded bythe ADC module in the ServoToGo card, and the current wasmeasured by using the clamp-on AC/DC current probes (Fluke80i-110s). The output of current probe was also recorded bythe ADC module in the ServoToGo card. The total energyconsumption for the robotic manipulator is computed as:
E =∫ t
0(v1i1 + v2i2)dt, (50)
where v1 and v2 denote the voltage, and i1 and i2 representthe current across the DC motors of the first and second jointsrespectively.
First, the proposed controller was implemented in therobot system, and the robot end effector started from(−0.11, 0.64) m inside the bound and stayed within it.The reference position (xf1, xf2) was set as a setpoint as:(−0.2, 0.1) m. As the bound shrinks to a neighborhoodaround the reference position xf , the position of end effectorconverges to the reference position accordingly. The controlparameters in equation (28) were set as: α = 1, kxi = 30,Ks = diag{0.001, 0.001}.
Next, a standard adaptive neural network controller usingthe position error Δx was implemented in the robot systemfor comparison, which was specified as:
τc =−kpJT (q)Δx−Kvsc
+Wcθc(q, q, xf , xf , xf )−kgsgn(sc), (51)
where sc = q−J+(q)xf +αJ+(q)Δx is the sliding vector,and Wc is the estimated weight matrix of the neural network,

11
0 5 10 15
−0.4
−0.2
0
0.2
0.4
0.6
time (s)
Err
or (
m)
x1
x2
bound
(a) Transient response with perfor-mance bound in equation (45)
0 5 10 15−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time (s)
Tor
que
(Nm
)
Joint1Joint2
(b) Input Torques with performancebound in equation (45)
0 5 10 15
−0.4
−0.2
0
0.2
0.4
0.6
time (s)
Err
or (
m)
x1
x2
bound
(c) Transient response with perfor-mance bound in equation (48)
0 5 10 15−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time (s)
Tor
que
(Nm
)
Joint1Joint2
(d) Input Torques with performancebound in equation (48)
Fig. 14. Experiment 3: the transient response of the closed-loop system is guaranteed when the tracking errors are inside the performance bound.
TABLE IICOMPARISON OF ENERGY CONSUMPTION (J)
NO. 1 2 3 4 5 6 7 8 9 10 11 12 AVG. DEV.
Proposed 0.954 0.938 0.938 0.82 0.944 0.93 0.942 0.95 0.936 0.862 0.956 0.84 0.918 0.002Standard 1.328 1.284 1.248 1.176 1.288 1.272 1.272 1.286 1.246 1.202 1.271 1.2 1.258 0.002
and θc(q, q, xf , xf , xf ) is the activation function. The controlparameters remain the same.
The energy consumption is computed based on equation(50), and Table II illustrates the quantitative comparisons basedon the twelve experimental results, by using the two controllersin equations (28) and (51) respectively. The comparison of theenergy accumulation in one experiment is shown in Fig. 15.As seen from Table II and Fig. 15, the proposed controllerrequires less energy than the standard controller.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
time (s)
Ene
rgy
(J)
proposedstandard
Fig. 15. Experiment 4: it is seen that the proposed controller requires lessenergy as compared to the standard adaptive neural network controller.
VI. CONCLUSION
In this paper, a new adaptive neural network controllerwith a unified objective bound has been proposed for roboticmanipulator. The proposed unified bound is a generalizationof setpoint, trajectory and performance bound, and it can bespecified as the dynamic region to suit different requirementsof robot tasks. The stability of the closed-loop system isanalyzed by using Lyapunov-like analysis, and experimentalresults are presented to illustrate the performance of theproposed approach and the energy-saving property of theproposed neural network controller with the dynamic region.
REFERENCES
[1] D. Sun, S. Hu, X. Shao, and C. Liu, ”Global stability of a saturatednonlinear PID controller for robot manipulators,” IEEE Transactionson Control Systems Technology, Vol. 17, No. 4, pp. 892-899, 2009.
[2] Y. Karayiannidis, and Z. Doulgeri, ”Model-free robot joint position reg-ulation and tracking with prescribed performance guarantees,” Roboticsand Autonomous Systems, Vol. 60, No. 2, pp. 214-226, 2012.
[3] S. Arimoto, Control Theory of Nonlinear Mechanical Systems - APassivity-Based and Circuit-Theoretic Approach. Oxford, Clarendon.
[4] J. J. E. Slotine, and W. Li, ”On the adaptive control of robot manipu-lators,” International Journal of Robotics Research, No. 6, pp. 49-59,1987.
[5] G. Niemeyer, and J. J. E. Slotine, ”Performance in adaptive manipulatorcontrol,” International Journal of Robotics Research, Vol. 10, No. 2,pp. 149-161, 1991.
[6] H. Berghuis, R. Ortega, and H. Nijmeijer, ”A robust adaptive robotcontroller,” IEEE Transactions on Robotics and Automation, Vol. 9,No. 6, pp. 825-830, 1993.
[7] F. L. Lewis, C. T. Abdallah, and D. M. Dawson, Control of RobotManipulators, New York, Macmillan, 1993.
[8] P. Tomei, ”Robust adaptive friction compensation for tracking controlof robot manipulators,” IEEE Transactions on Automatic Control, Vol.45, No. 11, pp. 2164-2168, 2000.
[9] C. C. Cheah, C. Liu, and J. J. E. Slotine, ”Adaptive tracking controls forrobots with unknown kinematics and dynamic properties,” InternationalJournal of Robotics Research, Vol. 25, No. 3, pp. 283-296, 2006.
[10] C. C. Cheah, D. Q. Wang, and Y. C. Sun, ”Region-reaching control ofrobots,” IEEE Transactions on Robotics, Vol. 23, No. 6, pp. 1260-1264,2007.
[11] C. C. Cheah, S. P. Hou, and J. J. E. Slotine, ”Region-based shapecontrol for a swarm of robots,” Automatica, Vol. 45, pp. 2406-2411,2009.
[12] S. P. Hou, and C. C. Cheah, ”Can a simple control scheme work for aformation control of multiple autonomous underwater vehicles?” IEEETransactions on Control Systems Technology, Vol. 19, No. 5, pp. 1090-1101, 2011.
[13] R. M. Sanner, and J. J. E. Slotine, ”Gaussian networks for directadaptive control,” IEEE Transactions on Neural Networks, Vol. 3, No.6, pp. 837-863, 1992.
[14] R. M. Sanner, and J. J. E. Slotine, ”Stable adaptive control of robotmanipulators using ”neural” networks,” Neural Computation, Vol. 7,No. 4, pp. 753-790, 1995.
[15] R. M. Sanner, and J. J. E. Slotine, ”Structurally dynamic waveletnetworks for adaptive control of robotic systems,” International Journalof Control, Vol. 70, No. 3, pp. 405-421, 1998.
[16] F. L. Lewis, K. Liu, and A. Yesildirek, ”Neural net robot controllerwith guaranteed tracking performance,” IEEE Transactions on NeuralNetworks, Vol. 6, No. 3, pp. 703-715, 1995.

12
[17] F. L. Lewis, A. Yesildirek, and K. Liu, ”Multilayer neural net robotcontroller with guaranteed tracking performance,” IEEE Transactionson Neural Networks, Vol. 7, No. 2, pp. 388-399, 1996.
[18] F. L. Lewis, ”Neural network control of robot manipulators,” IntelligentSystem and Their Applications, Vol. 11, No. 3, pp. 64-75, 1996.
[19] S. S. Ge, T. H. Lee, and C. J. Harris, Adaptive Neural Network Controlof Robotic Manipulators. World Scientific Publishing, 1998.
[20] R. Carelli, E. F. Camacho, and D. Patino, ”A neural network basedfeedforward adaptive controller for robots,” IEEE Transactions onSystems, Man, Cybernetics, Vol. 25, No. 9, pp. 1281-1288, 1995.
[21] H. D. Patino, R. Carelli, and B. R. Kuchen, ”Neural networks for ada-vanced control of robot manipulators,” IEEE Transactions on NeuralNetworks, Vol. 13, No. 2, pp. 343-354, 2002.
[22] S. J. Yoo, J. B. Park, and Y. H. Choi, ”Adaptive output feedback controlof flexible-joint robots using neural networks: Dynamic surface designapproach,” IEEE Transactions on Neural Networks, Vol. 19, No. 10,pp. 1712-1726, 2008.
[23] L. Cheng, Z. Hou, and M. Tan, ”Adaptive neural network trackingcontrol for manipulators with uncertain kinematics, dynamics andactuator model,” Automatica, Vol. 45, No. 10, pp. 2312-2318, 2009.
[24] Y. Zhao, and C. C. Cheah, ”Neural network control of multifingeredrobot hands using visual feedback,” IEEE Transactions on NeuralNetworks, Vol. 20, No. 5, pp. 758-767, 2009.
[25] S. Bhasin, K. Dupree, P. M. Patre, and W. E. Dixon, ”Neural networkcontrol of a robot interacting with an uncertain viscoelastic environ-ment,” IEEE Transactions on Control Systems Technology, Vol. 19, No.4, pp. 947-955, 2011.
[26] L. Wang, T. Chai, and C. Yang, ”Neural-network-based contouring con-trol for robotic manipulators in operational space,” IEEE Transactionson Control Systems Technology, Vol. 20, No. 4, pp. 1073-1080, 2012.
[27] C. Bechlioulis, Z. Doulgeri, and G. Rovithakis, ”Neuro-adaptiveforce/position control with prescribed performance and guaranteedcontact maintenance,” IEEE Transactions on Neural Networks, Vol.21, No. 12, pp. 1857-1868, 2010.
[28] C. P. Bechlioulis, and G. A. Rovithakis, ”Robust adaptive controlof feedback linearizable MIMO nonlinear systems with prescribedperformance,” IEEE Trans. Automatic Control, Vol. 53, No. 9, pp.2090-2099, 2008.
[29] C. P. Bechlioulis, and G. A. Rovithakis, ”Adaptive control withguaranteed transient and steady state tracking error bounds for strictfeedback systems,” Automatica, Vol. 45, No. 2, pp. 532-538, 2009.
[30] C. P. Bechlioulis, and G. A. Rovithakis, ”Prescribed performanceadaptive control for multi-input multi-output affine in the controlnonlinear systems,” IEEE Trans. Automatic Control, Vol. 55, No. 5,pp. 1220-1226, 2010.
[31] J. A. Farrell, and M. M. Polycarpou, Adaptive Approximation BasedControl: Unifying Neural, Fuzzy and Traditional Adaptive Approxima-tion Approaches. New York: John Wiley & Sons, 2006.
[32] C. A. Desoer, and M. Vidyasagar, Feedback Systems: Input-OutputProperties. New York: Academic Press, 1975.
[33] M. W. Spong, and M. Vidyasagar, Robot Dynamics and Control. NewYork: John Wiley & Sons, 1989.
[34] J. J. E. Slotine, and W. Li, Applied Nonlinear Control. EnglewoodCliffs, New Jersy: Prentice Hall, 1991.
[35] C. C. Cheah, ”Task-space PD control of robot manipulators: unifiedanalysis and duality property”, International Journal of Robotics Re-search, Vol. 27, No. 10, pp. 1152-1170, 2008.
Xiang Li (M’12) received the Bachelor’s, Master’sand Ph.D. degrees from Beijing Institute of Tech-nology, Beijing, China, and Nanyang TechnologicalUniversity, Singapore, in 2006, 2008, and 2013,respectively.
He is currently a Research Fellow with the In-telligent Robotics Lab, Nanyang Technological Uni-versity. His current research interests include robotcontrol, visual servoing, and cell manipulation.
Dr. Li has served as a Reviewer for several in-ternational journals including Automatica, the IEEE
Transactions on Robotics, the IEEE Transactions on Mechatronics, and theAsian Journal of Control. He received the Highly Commended Paper Award atthe Third IFToMM International Symposium on Robotics and Mechatronics.
Chien Chern Cheah (SM’03) was born in Sin-gapore. He received B.Eng. degree in ElectricalEngineering from National University of Singaporein 1990, M.Eng. and Ph.D. degrees in ElectricalEngineering, both from Nanyang Technological Uni-versity, Singapore, in 1993 and 1996, respectively.
From 1990 to 1991, he worked as a design engi-neer in Chartered Electronics Industries, Singapore.He was a research fellow in the Department ofRobotics, Ritsumeikan University, Japan from 1996to 1998. He joined the School of Electrical and
Electronic Engineering, Nanyang Technological University as an assistantprofessor in 1998. Since 2003, he has been an associate professor inNanyang Technological University. In November 2002, he received theoversea attachment fellowship from the Agency for Science, Technology andResearch (A*STAR), Singapore to visit the Nonlinear Systems laboratory,Massachusetts Institute of Technology. He serves as an associate editor forIEEE Transactions on Robotics, Automatica and Asian Journal of Control.




![SOCRATES: Towards a Unified Platform for Neural Network ...lijiaying.github.io/papers/socrates.pdfclasses of neural networks or properties. For instance, some existing work [10],](https://img.pdfslide.us/doc/110x75/5f98276a8025f8306207f7ec/socrates-towards-a-uniied-platform-for-neural-network-classes-of-neural-networks.jpg)