-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
1/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
IEEE/ASME TRANSACTIONS ON MECHATRONICS 1
Adaptive Estimation-Based Leakage Detection for aWind Turbine
Hydraulic Pitching System
Xin Wu, Yaoyu Li, Member, IEEE, Feng Li, Zhongzhou Yang, and Wei
Teng
AbstractOperation and maintenance (OM) cost has con-tributed a
major share in the cost of energy for wind power gener-ation.
Condition monitoring can help reduce the OM cost of windturbine.
Among the wind turbine components, the fault diagnosisof the
hydraulic pitching system is investigated in this study.
Thehydraulic pitching system is critical for energy capture, load
re-duction, and aerodynamic braking. The fault detection of
internaland external leakages in the hydraulic pitching system is
studiedin this paper. Based on the dynamic model of the hydraulic
pitch-ing system, an adaptive parameter estimation algorithm has
beendeveloped in order to identify the internal and external
leakagesunder the time-varying load on the pitch axis. This scheme
candetect and isolate individual faults in spite of their strong
couplingin the hydraulic model. A scale-down setup has been
developed asthe hydraulic pitch emulator, with which the proposed
method isverified through experiments. The pitching-axis load input
is ob-tained from simulation of a 1.5-MW
variable-speed-variable-pitchturbine model under turbulent wind
profiles on the FAST (fatigue,aerodynamics, structural, and tower)
software developed by theNational Renewable Energy Laboratory. With
the experimentaldata, the leakage and leakage coefficients can be
predicted via theproposed method with good performance.
Index TermsAdaptive estimation, hydraulic systems, leak
de-tection, wind energy.
I. INTRODUCTION
WIND power has become the worlds fastest growing re-
newable energy source. The installed wind power ca-
pacity world wide has exceeded 160 GW. The U.S. targets 20%
wind-based electricity generation, i.e., over 300 GW, by
2030.
As wind power is growing toward a major utility source,
reduc-
ing the cost of energy (COE) becomes a critical issue to
make
wind power competitive to conventional sources [1].
A major portion of the COE for wind power generation is the
relatively high cost for operation and maintenance (OM).
Wind
turbines are hard-to-access structures, and they are often
lo-
Manuscript received August 12, 2010; revised February 18, 2011;
acceptedApril 2, 2011. Recommended by Technical Editor Y. Li. This
work was sup-ported in part by the Fundamental Research Funds for
the Central Universitiesof China.
X. Wu and W. Teng are with the School of Energy, Power and
MechanicalEngineering, North China Electric Power University,
Beijing 102206, China(e-mail: [email protected];
[email protected]).
Y. Li and Z. Yang are with the Department of Mechanical
Engineering,University of Wisconsin, Milwaukee, WI 53211 USA
(e-mail: [email protected];[email protected]).
F. Li is with the School of Mechanical Engineering, University
of Scienceand Technology, Beijing 100083, China (e-mail:
[email protected]).
Color versions of one or more of the figures in this paper are
available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMECH.2011.2142400
cated in remote areas. These factors alone increase the OM
cost
for wind power systems. Also, poor reliability directly
reduces
availability of wind power due to the turbine downtime [1].
The
OM cost for an offshore wind turbine is estimated to be 20%
25% of the total income [1], [2]. Condition monitoring and
fault
diagnosis of wind turbines has, thus, greater benefit for such
sit-
uations. In addition, wind turbine repair and maintenance
that
require extensive usage of cranes and lifting equipment
create
a highly capital-intensive operation as well as delayed
services
due to lack of crane availability and needs for optimal
weather
conditions. Also, the trend that hascurrentlyemerged to
dampen
prospects is lack of personnelavailable to perform
theconsistent
OM required to keep turbines functioning and efficient.
A blade pitch control system is critical for turbine opera-
tion, as pitching is an important actuation for enhancing
energy
capture, mitigating operational load, stalling and
aerodynamic
braking [3][6]. Under very strong wind, in particular, it is
used
as aerodynamic brake to stop the turbine. Avoiding pitching
failure is thus important for system operation and safety.
Pitch-
ing motion is typically driven by hydraulic actuators or
electric
motors. The hydraulic pitching system is advantageous in
large
stiffness, little backlash, and higher reliability. Electric
motor
driven pitching systems have larger bandwidth, which is more
desirable for faster actions such as individual pitching,
however,suffering from smaller stiffness, quicker wear in
transmission,
and larger backlash. For large to extreme aerodynamic load-
ing situations, hydraulic systems are considered more
fail-safe.
Hydraulic actuation system failure takes a remarkable
portion
among different factors of wind turbine failure. For the
opera-
tion under extreme wind, failure of hydraulic pitching may
lead
to catastrophic failure of the whole turbine, which must be
pre-
vented from. Fault detection of the hydraulic pitching system
is
critical for protecting turbine under windy operation as
turbine
stalling is a critical measure of protecting wind turbine
[1].
Leakage is a critical fault for hydraulic systems, which may
reduce the effective stiffness and efficiency. As
consequence,the control performance and stability robustness can be
dramat-
ically undermined. There are two kinds of leakages in
hydraulic
systems: external leakage in hose and connector, and
internal
(cross-port) leakage in piston seal. The external leakage
may
cause a sluggish response of the hydraulic system. The
internal
leakage happens when the fluid crosses the cylinder piston
seal
that closes the gap between the moving piston and the cylin-
der. As the internal leakage increases, the cylinder may lose
the
ability to manipulate the load [12].
Fault diagnosis of hydraulic control systems has been
studied
for many other industrial applications, with both data-driven
and
model-based approaches. For the data-driven fault detection,
1083-4435/$26.00 2011 IEEE
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
2/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
2 IEEE/ASME TRANSACTIONS ON MECHATRONICS
the prior knowledge about the faulty behavior on the
hydraulic
systemisneeded. DaleyandWang [7]proposed a simplescheme
based on artificial neural networks (ANN) for detecting and
diagnosing faults in the fluid power systems. The ANN is
first
trained on a healthy system to provide a detection signal of
small amplitude when the system operates normally. With the
knowledge of the effects of some known faults on this signal,a
diagnostic vector is constructed to determine the location and
size of all similar faults. Watton and Kwon [8] developed an
ANN method for identifying the behavior of fluid power
control
systems with frequency-rich input excitation. Seong et al.
[9]
developed a back propagation ANN method for detecting and
diagnosing a disk wear failure anda foreign objectfailure
among
the various failure and modes of check valves. Crowther et
al. [10] presented a neural network approach for fault
diagnosis
of the hydraulic system based on the classification of
surfaces
in system output vector space. Chen et al. [11] developed a
new
ANNapproach to thefault diagnosisof a waterhydraulic system
based on the wavelet analysis of a vibration signal.
Model-based approach has been investigated, based on
thenonlinear dynamic models for hydraulic systems. An and
Sepehri [12] presented theapplication of extended Kalman
filter
in order to identify internal- and external-leakage faults,
which
are assumed to occur individually, in hydraulic actuators. As
a
combination of ANN (data-driven) and model-based methods,
Shi et al. [13] developed a gray-box model, aiming to
provide
accurate and robust fault detection for electrohydraulic
control
systems. Gayaka and Yao [14] used an adaptive robust
approach
for fault detection and accommodation in electrohydraulic
sys-
tems. Du [15] proposed a health monitoring method for the
hydraulic system through the adaptive parameter estimation
of
effective bulk modulus and leakage coefficient in the system.It
is also worthwhile to mention that the adaptive control
methods areapplied on thehydraulicsystem widely. Papadopou-
los et al. [16] focused on the modeling, parameter
estimation,
and control for a heavy-duty electrohydraulic manipulator of
a
harvester machine. Mohanty and Yao [17] developed an inte-
grated directindirect adaptive robust control algorithm for
an
electrohydraulic manipulator with unknown valve dead band to
improve the achievable output-tracking performance. Kaddissi
et al. [18] studied the real-time position control of an
electrohy-
draulic system using indirect adaptive backstepping.
The hydraulic pitching systems for the modern utility wind
turbines feature variable rotor speed, pitch angles, and
torque
loads on the pitch axis. Also, turbulence nature of wind,
wind
shear, and wake lead to strongly time varying and unsteady
loads. Such complexity determines that a good fault
diagnosis
solution for the hydraulic pitch system should work well
under
transient and unsteady operation and load, in addition to
steady-
state operation and load.
This study is focused on the faults of internal and external
leakages for the hydraulic pitching system. Considering the
ef-
fect of the time-varying load on the hydraulic system, a
model-
based adaptive parameter estimation algorithm has been
devel-
oped to identify the internal and external leakages.
Comparing
with aforementioned estimation methods, this scheme can, not
only detect, but also isolate individual leakages in spite of
their
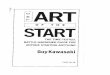
Fig. 1. Hydraulic actuation system for the wind turbine blade
pitching mech-anism [6], [19].
coupled relationship in the hydraulic model, which is
advanta-
geous for the maintenance practice. The proposed methods are
verified through the experiments performed on a scale-down
hydraulic pitching emulator. The aerodynamic loading on the
pitching axis is emulated by the disturbance load provided
by
an additional hydraulic cylinder. The pitching load is
obtained
from the simulation of a 1.5-MW variable-speed
variable-pitch
turbine model under turbulent winds on theFAST(fatigue,aero-
dynamics, structural, and tower) software developed by the
Na-
tional Renewable Energy Laboratory (NREL).
The remainder of this paper is organized as follows. The
model-based adaptive leakage-detection algorithm is then
intro-
duced in Section II. Section III describes the hydraulic
pitching
emulator and fault diagnosis oriented test. Section IV
presents
the experimental results for the estimation of internal and
exter-
nal leakages in thehydrauliccylinderunder differentwind
speed
and different levels of coupled internal and external
leakages.Section V concludes this paper with discussion.
II. ADAPTIVE PARAMETER ESTIMATION FOR HYDRAULIC
PITCHING SYSTEMS
Theschematicof a typical hydraulicpitching systemis shown
in Fig. 1.
Similar to many other hydraulicactuationsystems, thesystem
consists of a fluid tank, a hydraulic pump, an
electrohydraulic
proportional directional valve, a relief valve, a hydraulic
cylin-
der. The pitching motion is realized with a slider-crank
mech-
anism by attaching the piston of cylinder to the pitching
blade
shaft via a rigid bar [6], [19].
The dynamic model of hydraulic pitching cylinder is given
by [20], [21]
QA =AA xp
ePA + AA xp + Cip (PA PB ) + Cep A PA
QB =AB (L xp )
ePBAB xpCip (PAPB )+Cep B PB
(1)
F = PA AA PB AB mxp (2)
where P denotes chamber pressure, subscripts A and B
denote chambers A and B, respectively, Cip denotes the
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
3/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
WU et al.: ADAPTIVE ESTIMATION-BASED LEAKAGE DETECTION FOR A
WIND TURBINE HYDRAULIC PITCHING SYSTEM 3
internal-leakage coefficient in the piston, Cep A denotes the
ex-
ternal leakage at chamber A, Cep B denotes the external
leakage
at chamber B, e denotes the effective bulk modulus,xp
denotes
the piston position, Q denotes the hydraulic fluid flow rate
in
the circuit, A denotes the piston area, and m denotes the
piston
mass. F denotes the sum of external load and friction, and
for
the particular case of hydraulic pitching system as in this
study,this is governed by the pitching load.
In thefollowing, an adaptiveestimation algorithmis proposed
for identifyingthe leakage-relatedparametersfor
faultdiagnosis
purpose. Thedynamic equations(1) and(2)canbe modified into
QA AA xp =AA xp
e
dPA
dt+ Cip (PA PB ) + Cep A PA
QB +AB xp =AB (Lxp )
e
dPB
dtCip (PAPB )+Cep B PB
PA AA PB AB = mxp + F.(3)
Then, (3) can also be written as [15]
PL =
QA
AA xp+ Q
B
AB (L xp )
e PL
1
AA xp+
1
AB (L xp )
e Cip
PA
AA xpe Cep A
+PB
AB (L xp )e Cep B
1
xp+
1
L xp
e
m
(PA AA PB AB F)dt (4)
where PL = PA PB is the pressure differential across
thepiston.
Let
1 = e , 2 = e Cip , 3 = e Cep A ;
4 = e Cep B , 5 =e
m(5)
f1 =QA
AA xp+
QB
AB (L xp )
f2 = PL
1
AA xp+
1
AB (L xp )
f3 = PA
AA xpf4 =
PB
AB (L xp )
f5 =
1
xp+
1
L xp
(PA AA PB AB F)dt (6)
where i (i = 1, . . ., 5) are unknown constants in terms of
systemparameters, including the effective bulk modulus, internal-
and
external-leakage coefficients, and the inertia
mass.Identification
ofi would achieve the purpose of detecting leakage and also
the change of bulk modulus (e.g., due to air contamination).
Equation (3) can, thus, be written as [22]
PL =5
i=1
i fi . (7)
An estimation dynamic rule can be established as
PL = PL PL +
5i= 1
i fi (8)
where is a positive constant and represents parameter and
statevariableestimation. Subtracting (7) from(8),
theestimation
error dynamics is
PL = PL +5
i= 1
i fi (9)
where PL = PL PL , i = i i (i = 1, ..., 5).Define a Lyapunov
function as
V =1
2P2L +
1
2
5i= 1
2i . (10)
The time derivative of (10) is
V = PL PL +
5i=1
i fi
+
5i=1
i i
(11)
where is a positive constant learning rate.
An adaptive learning rule canbe applied to identify the
values
ofi . Let
i = PL fi (12a)
i.e.,
1 = 1 = PL
QA
AA xp+
QB
AB (L xp )
(12b)
2 = 2 = PL PL
1AA xp
+ 1AB (L xp )
(12c)
3 = 3 = PL PA
AA xp(12d)
4 = 4 = PL PB
AB (L xp )(12e)
5 = 5 = PL
1
xp+
1
L xp
(PA AA PB AB F)dt
.
(12f)
Then,
V = P2L 0 (13)
where and are both positive constants.
Notice that f5 is bounded as
f5 =
1
xp+
1
L xp
(PA AA PB AB F)dt
=
1
xp+
1
L xp
(mxp ). (14)
Load F can be obtained through (3) with the least-squares
estimation method [21], [22]. Since fi are all bounded and
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
4/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
4 IEEE/ASME TRANSACTIONS ON MECHATRONICS
Fig. 2. Schematic of hydraulic pitching emulator.
Fig. 3. Flowchartof thehydraulicpitchingemulatorwith theinput
from FAST.
PL (t) 0 as t , thus i 0 as t . When PLand fi are all bounded,
the time derivation of V is negative
semidefinite [22]. Thus, the adaptive learning rule of (12)
can
achieve unbiased estimation for i when the input signals
(i.e.,
chamber pressure, flow rate, and piston position) satisfy
the
persistent excitation condition.
This estimation scheme can detect the change of bulk modu-
lus (e.g., due to the presence of air contamination or change
of
fluid temperature), internal andexternal leakage on both sides
of
hydraulic cylinder piston. Detection of bulk modulus,
internal
and external leakage can, thus, be decoupled, which is
conve-
nient for maintenance practice. This study is limited to
leakage
detection only, but the method can be easily extended to
that
including the change of bulk modulus. This detection scheme
relies on the sensor measurements of piston position, and
flow
rate and pressure of chambers in the hydraulic cylinder,
which
are available on typical products.
III. HYDRAULIC PITCHING EMULATOR AND LEAKAGE TESTS
A scale-down hydraulic pitching emulator has been built to
conduct experiments for validating the proposed fault
detection
scheme. The objectives of the hydraulic pitching emulator
are
twofold: 1) emulate the motion of hydraulic pitching and the
dynamic load about the pitching axis under realistic winds;
and
Fig. 4. Illustration of the pitching mechanism [6], [19].
Fig. 5. Different kinds of wind speed simulated through
FAST.
2) emulate the faults of interest in current stage, i.e., the
internal
and external leakages for the hydraulic cylinder.
The schematic of hydraulic pitching emulator is shown in
Fig. 2. It mainly consists of two back-to-back hydraulic
cylin-
ders: one is used to emulate an actual hydraulic actuator for
a
wind turbine blade pitching system (named as pitching cylin-
der), while the other is used to generate the aerodynamic
loading torque as disturbance to the hydraulic pitching
system
(named as load cylinder). The piston of the pitching
cylinder
is controlled to follow the pitch angle profile obtained from
the
simulation under different wind profiles on the FAST
software.
The loading cylinder can provide corresponding force output
from the FAST simulation with different cases of wind speed.
The cylinder parameters in the hydraulic emulator are: AA =1.26
103 m2 , AB = 0.94 10
3 m2 , xp [0, 0.2] m, and
L = 0.2 m.Fig. 3 shows the simulation platform for this study
and how
the emulated pitching load can be obtained. The NRELs FAST
software models the wind turbine as a combination of rigid
and
flexible bodies [23]. TurbSimis used to create full field
turbulent
wind files which are input to AeroDyn. AeroDyn is used
along-
side FAST to simulate the aerodynamic forces on the turbine
blades and structure. The pitch angles and the pitching load
torque obtained from FAST simulation can be used as
reference
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
5/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
WU et al.: ADAPTIVE ESTIMATION-BASED LEAKAGE DETECTION FOR A
WIND TURBINE HYDRAULIC PITCHING SYSTEM 5
Fig. 6. Reference and output of pitching cylinder position and
load.
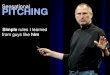
Fig. 7. Estimation of large internal leakage and small chamber A
external leakage and leakage coefficients for different wind input
profiles. (a) Estimation of
internal and chamber A external leakage. (b) Estimation of
internal and chamber A external leakage coefficients.
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
6/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
6 IEEE/ASME TRANSACTIONS ON MECHATRONICS
Fig. 8. Estimation of small internal leakage and large chamber A
external leakage and leakage coefficients for different wind input
profiles. (a) Estimation ofinternal and chamber A external leakage.
(b) Estimation of internal and chamber A external leakage
coefficients.
for the pitching and load cylinders to follow in the
respective
position and force control loops in experimental study.
Thesystemis powered by twomotor-driven hydraulicpumps.The
pitching and load cylinders are both single-piston cylinders
and their movements are controlled by the proportional
valves,
respectively. The valves are controlled by Advantech 610 in-
dustrial PC with PCI 1713 analog input module and PCI 1721
analog output module. The PID controllers are designed to
con-
trol the piston position in the pitching cylinder, and the
force
output of the load cylinder [24].
The emulator includes a set of auxiliary circuits to
simulate
leakage faults of the pitching cylinder. As shown in Fig. 2,
the internal leakage was intentionally introduced between
two
chambers, and the external leakage at chamber A of the
pitching
cylinder. The internal leakage is simulated through
bypassing
fluid across the piston. This is achieved by connecting the
two
chambers and controlling the flow through an adjustable flow
control valve. The flow rate is measured again using a
turbineflow meter. The range of flow meter is 20 L/min with the
accu-
racy of 1% full scale.
For the simulation of the external leakage on chamber A
of the cylinder, a portion of the fluid flow from the side
of
chamber A is bypassed to the reservoir by adjusting the flow
control valve. The output of the external-leakage flow
control
valve is measured with the same kind of flow meter as
earlier.
The estimation of internal and external leakages Qip and Qep
Afollow the definition by Merritt [12], [20]:
Qip = Cip (PA m PB m ) (15a)
Qep A = Cep A PA m (15b)
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
7/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
WU et al.: ADAPTIVE ESTIMATION-BASED LEAKAGE DETECTION FOR A
WIND TURBINE HYDRAULIC PITCHING SYSTEM 7
where Cip denotes the estimation of internal-leakage
coefficient
and Cep A denotes the estimation of chamber A
external-leakage
coefficient. PA m and PB m represent the measurements of
pressure of chambers A and B, respectively.
Through sensors measurement, the internal- and external-
leakage coefficients Cip m and Ce p A m follow the definition
by
Merritt [20]:
Cip m =Qip m
PA m PB m(16a)
Ce p A m =Qe p A m
PA m(16b)
where Qip m denotes the flow rate measurement of internal
leakage, and Qe p A m denotes the flow rate measurement for
chamber A external leakage.
IV. EXPERIMENTAL RESULTS
In order to illustrate thegeometric relationshipbetween
cylin-
der dimension and the pitching angle, the variables or the
hy-draulic pitching mechanism is shown in Fig. 4.
For data acquisition, the sampling rate was set as 100 Hz,
and the data collection window was set to be 20 s with the
onboard memory capacity. A second-order Butterworth low-
pass filter with cutoff frequency of 5 Hz is designed to
filter
the data measured from linear variable differential
transformers
(LVDT), flow rate and pressure sensors on the pitching
cylinder
[21], [24].
The piston position of pitching cylinder can be obtained as
xp (p ) = L2
p + r2
p 2 Lp rp cos( + p ) lp (17)
where Lp , lp , rp , and are dimension shown in Fig. 5. p is
the
pitch angle and xp is the pitching cylinder position. The
pitch
torque can be described as
Tp = Jp + Tw = Fc rp cos(p ) (18)
where J is the moment of inertia of the blade about the
pitch
axis and Tw is the wind load torque imposed on the pitch
axis.
In this study, we set Lp = 1.1 m, lp = 1.0 m, rp = 0.5 m, and =
63. Considering the capacity of hydraulic cylinders in thetest bed,
the reference piston position of pitching cylinder and
load provided by the load cylinder are scaled down by twice
and
1000 times, respectively.
The pitching angle and load force profiles for different
wind
inputs are obtained from the dynamic simulation of a 1.5-MW
wind turbine model (WindPact) on FAST. For this 1.5-MW
wind turbine, the cutoff wind speed is set to be 27.5 m/s.
The
experiments include cases for mean of 5-, 13-, and 21-m/s
wind
speed with 20% turbulence. The extreme condition of 30-m/s
wind speed is also considered in the experiments. Four cases
of
wind profiles simulated through FAST are shown in Fig. 5.
For four cases of wind input profiles, the reference and
output
of piston position and load in the pitching and load cylinder
are
calculated by (17) and (18), as shown in Fig. 6. For the
piston
position output in pitching cylinder with different wind
speed,
the steady-state errors are within 3%. For the load output in
load
cylinder with different wind speed, the steady-state errors
are
within 21.4%.
The leakage and leakage-coefficient estimation for the two
testing cases is presented as follows. In the experiments,
all
input signals satisfy the persistent excitation condition.
The
measurement of leakage is also filtered by the second-order
Butterworth low-pass filter with cutoff frequency of 5 Hz
de-signed earlier. The leakage estimationis calculatedthrough
(15).
The leakage coefficient can be obtained through (16) with
the
measurement of leakage and chambers pressure.
Based on the parameter estimation algorithm described in the
previous section, the leakage estimation are derived and
shown
with measured leakage (with filter) in Figs. 7 and 8 for
different
wind input profiles. The developed algorithm can detect the
in-
ternal and chamber A external leakage in the pitching
cylinder
within 7.8% mean steady-state error and 11% peak
steady-state
error. For the internal and chamber A external leakage
coeffi-
cients, the estimation errors are within 7.3% mean
steady-state
error and 13.3% peak steady-state error.
Based on Figs. 7 and 8, the convergence time for the
leakageestimation is within 12 s for all simulated cases.
Case 1: Large internal andsmall chamber A external leakage.
Case 2: Small internal and large chamber A external leakage.
Based on Figs. 7 and 8, the mean of steady-state leakage
estimation errors are smaller under the wind speed of 5 and
30 m/s than under the wind speed of 13 and 21 m/s for
different
levels of internal and chamber A external leakage.
Similarly,
the maximum steady-state estimation errors are smaller under
the wind speed of 5 and 30 m/s than under the wind speed of
13 and 21 m/s for different levels of internal and chamber A
external leakage. Variable piston position (pitch angle),
which
corresponds to varying reference internal and external
leakageand leakage coefficient, seems to have greater impact on
the
estimation accuracy.
Based on Figs. 7 and 8, the mean of steady-state leakage-
coefficient estimation errors are also smaller under the
wind
speed of 5 and 30 m/s than under the wind speed of 13 and
21 m/s for different levels of internal and chamber A
external-
leakage coefficients. The maximum steady-state estimation
er-
rors are smaller under the wind speed of 5 and 30 m/s than
under the wind speed of 13 and 21 m/s for different levels
of
internal and chamber A external leakage coefficients. The
mean
of leakage coefficient steady-state estimation errors are
within
0.53% smaller than the mean of leakage steady-state estima-
tion errors. The peak leakage coefficient steady-state
estimation
errors are within 2.33% larger than the peak leakage steady-
state estimation errors. The leakage estimation appears to
have
better tracking performance under the variable-pitch
operation,
while the tracking error for the leakage coefficient seems to
be
bearable to certain extent.
Considering the accuracy range of the sensors (1% of
full scale) and the varying reference internal and external
leakages and leakage coefficient in the cases of varying
pitch-
ing position, the developed estimation algorithm
demonstrates
acceptable performance for fault detection and isolation to
quite
an extent. Regarding to the choice diagnostic probe, leakage
coefficients and leakage have respective advantages. Leakage
-
8/3/2019 Adaptive Estimation-Based Leakage Detection Fro a Wind
Turbine Hydraulic Pitching System
8/8
This article has been accepted for inclusion in a future issue
of this journal. Content is final as presented, with the exception
of pagination.
8 IEEE/ASME TRANSACTIONS ON MECHATRONICS
coefficient reflects a good normalized quantity, which is
easier
to be defined as a single diagnostic probe. For
variable-pitch
operation, it is difficult to use the instantaneous leakage as a
di-
agnostic probe, rather, the accumulative/average leakage
(e.g.,
for several turns of turbine rotor) makes more sense.
V. CONCLUSION
The hydraulic pitching system is critical for securing
energy
capture, load reduction, and aerodynamic braking for wind
tur-
bine operation. This paper has presented a model-based adap-
tive leakage-detection algorithm. The proposed method con-
siders the realistic wind turbine operation condition, i.e.,
with
time-varying cylinder position and load. In spite of the
coupled
relation for the faults of cylinder internal and external
leakages
in the hydraulic system, the method can detect and isolate
each
individual fault through the measurement of sensors, i.e.,
pis-
ton position, and the flow rate, and pressure in chambers at
the
pitching cylinder. The proposed scheme is also applicable
when
bulk modulus needs to be included.
A scale-down hydraulic pitch emulator has been developed,
with which experimental data have been obtained under dif-
ferent turbulent wind inputs. The piston position in the
cylinder
and load referenceprofiles were obtained from the simulation
of
a 1.5-MW variable-speed turbine model on the NRELs FAST
software. Two cases of coupled different levels of internal
and
chamber A external leakage are simulated in the experiments.
With the sensors measurement of piston position, chambers
pressure, and chambers flow rate, the proposed algorithm can
detect the internal and chamber A external leakage in the
pitch-
ing cylinder within 7.8% mean steady-state error and 11%
peak
steady-state error. With the same sensors measurement, the
de-
veloped algorithm can estimate the internal and chamber A
ex-ternal leakage coefficients in the pitching cylinder within
7.3%
mean steady-state error and 13.3% peak steady-state error.
With
the consideration of accuracy range of sensors (1% of the
full
measurement scale)andthevarying referenceinternal andexter-
nalleakagesand leakage coefficient in thecasesof
varyingpitch-
ing position, these results sustain the validity of the
proposed
estimation scheme. In the future, more experiments with
differ-
ent levels of coupled internal and external leakages, and
bulk
modulus may be carried out to verify the developed
algorithm.
REFERENCES
[1] B. Lu, Y. Li, X. Wu, and Z. Yang, A review of recent
advances in windturbine condition monitoring and fault diagnosis,
in Proc. IEEE PowerElectron. Mach. Wind Appl., 2009, pp. 17.
[2] D. McMillan and G. W. Ault, Quantification of condition
monitoringbenefit for offshore wind turbines, Wind Eng., vol. 31,
no. 4, pp. 267285, May 2007.
[3] R. W. Hyers, J. G. McGowan, K. L. Sullivan, J. F. Manwell,
and B.C. Syrett, Condition monitoring and prognosis of utility
scale wind tur-bines, Energy Mater., vol. 1, no. 3, pp. 187203,
Sep. 2006.
[4] J. Ribrant and L. M. Bertling, Survey of failures in wind
power systemswith focus on Swedish wind power plants during
19972005, IEEETrans. Energy Convers., vol. 22, no. 1, pp. 167173,
Mar. 2007.
[5] J. Watton, Modelling, Monitoring, and Diagnostic Techniques
for FluidPower Systems. Berlin, Germany: Springer-Verlag, 2007.
[6] Y. Kong and Z. Wang, Modelling and analysing the hydraulic
variable-pitch mechanism for a variable-speed wind turbine, Wind
Eng., vol. 31,no. 5, pp. 341352, Oct. 2007.
[7] S. Daley and H. Wang, Fault diagnosis in fluid power
systems, Eng.Simul., vol. 13, no. 6, pp. 9931008, 1996.
[8] J. Watton and K. Kwon, Neural network modeling of fluid
power con-trol systems using internal state variables,
Mechatronics, vol. 6, no. 7,pp. 817827, Oct. 1996.
[9] S. Seong, S. Hur, J. S. Kim, J. T. Kim, W. Park, U. Lee, and
S. Lee,Development of diagnosis algorithm for the check valve with
spectralestimations and neural network models using acoustic
signals, Ann.
Nucl. Energy, vol. 32, no. 5, pp. 479492, Mar. 2005.[10] W. J.
Crowther, K. A. Edge, C. R. Burrows, R. M. Atkinson, and D.
J. Woollons, Fault diagnosis of a hydraulic actuator circuit
using neuralnetworks: An output vector space classification
approach, Proc. Inst.
Mech. Eng., J. Syst. Control Eng., vol. 212, no. 1, pp. 5768,
1998.[11] H. Chen, P. Chua, and G. Lim, Fault classification of
water hydraulic
system by vibration analysis with support vector machine, J.
Test. Eval.,vol. 35, no. 4, pp. 408415, Jul. 2007.
[12] L. An and N. Sepehri, Hydraulic actuator leakage fault
detection using
extendedKalman filter, Int. J. Fluid Power, vol. 6,no. 1,pp.
4151,Mar.2005.
[13] J. Shi, F. Gu, B. Lennox, and A. Ball, A grey-box modelling
and itsapplication in model-based fault detection, Int. J. COMADEM,
vol. 12,no. 1, pp. 2130, Jan. 2009.
[14] S. Gayaka andB. Yao,Fault Detection, identificationand
accommodationfor an electro-hydraulic system: An adaptive robust
approach, in Proc.17th World Congr. Int. Fed. Autom. Control,
Seoul, Korea, Jul. 2008,pp. 1381513820.
[15] H. Du, Hydraulic System Health Indicator, U.S. Patent 7 204
138, B2,Mar. 7 2006.
[16] E. Papadopoulos, B. Mu, and R. Frenette, On modeling,
identifica-tion, and control of a heavy-duty electrohydraulic
harvester manipulator,
IEEE/ASME Trans. Mechatronics, vol. 8, no. 2, pp. 178187, Jun.
2003.[17] A. Mohantyand B. Yao, Integrated direct/indirect adaptive
robust control
of hydraulic manipulators with valve deadband, IEEE/ASME
Trans.Mechatronics, Jul. 2011 (in press and available on line with
Digital ObjectIdentifier 10.1109/TMECH.2010.2051037).
[18] C. Kaddissi, J. Kenne, and M. Saad, Indirect adaptive
control of an elec-trohydraulic servo system based on nonlinear
backstepping, IEEE/ASMETrans. Mechatronics, Dec. 2011(in press
andavailableon line with DigitalObject Identifier
10.1109/TMECH.10.1109/TMECH.2010.2092785).
[19] M. H. Hansen (2007). How hard can it be to pitch a wind
turbine blade?RISO Lab, Denmark Tech. Univ., Kongens Lyngby,
Denmark [Online].Available: www.risoe.dtu.
dk/rispubl/art/2007_321_presentation.pdf
[20] H. Merritt, Hydraulic Control Systems. New York: Wiley,
1967.[21] S. Liu and B. Yao, Automated onboard modeling of
cartridge valve flow
mapping, IEEE/ASME Trans. Mechatronics, vol. 11, no. 4, pp.
381388,Aug. 2006.
[22] K. S. Narendra and A. M. Annaswamy, Stable Adaptive
Systems. En-glewood Cliffs, NJ: Prentice- Hall, 1989.
[23] J. M. Jonkman, M. L. Buhl Jr., FAST users guide, Tech. Rep.
Na-tional Renewable Energy Laboratory (NREL) at Golden, Colorado,
US.
NREL/EL-500-38230, Version 3.01, 2005.[24] A. Alleyne and R.
Liu, On the limitations of force tracking control for
hydraulic servosystems, Trans. ASME, J. Dyn. Syst., Meas.,
Control,vol. 121, no. 2, pp. 184190, 1999.
Authors photographs and biographies not available at the time of
publication.