Embed Size (px)
Citation preview
Economic Commission for EuropeInland Transport CommitteeWorld Forum for Harmonization of Vehicle Regulations174th sessionGeneva, 13-16 March 2018Item 2.3 of the provisional agendaCoordination and organization of work:Intelligent Transport System and automated vehicles
Proposal for the Definitions of Automated Driving under WP.29 and the General Principles for developing a UN Regulation on automated vehicles
Submitted by the Informal Working Group on Intelligent Transport Systems / Automated Driving*
The text reproduced below was prepared by the experts from Informal Working Group (IWG) on Intelligent Transport Systems / Automated Driving (ITS/AD). It is based on ECE/TRANS/WP.29/2017/145, distributed in English only during the 173th session of WP.29.
* * In accordance with the programme of work of the Inland Transport Committee for 2016–2017 (ECE/TRANS/254, para. 159 and ECE/TRANS/2016/28/Add.1, cluster 3.1), the World Forum will develop, harmonize and update Regulations in order to enhance the performance of vehicles. The present document is submitted in conformity with that mandate.
United Nations ECE/TRANS/WP.29/2018/2
Economic and Social Council Distr.: General9 January 2018
Original: English

ECE/TRANS/WP.29/2018/2
A proposal for the Definitions of Automated Driving under WP.29 and the General Principles for developing a UN Regulation on automated vehicles
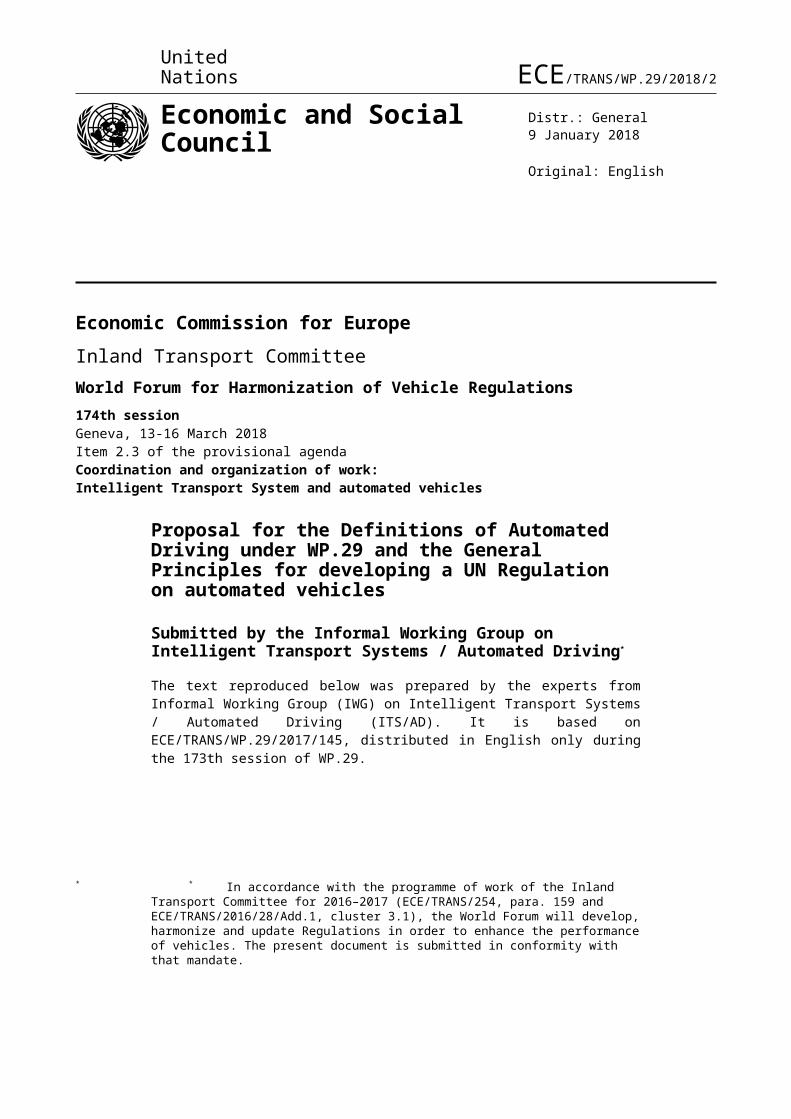
1. The following table reflects the general principles and definitions for automated driving systems as relevant for WP.29 to date. These principles are expected to be treated as guidelines for developing a new Regulation related to automated driving systems at WP.29 if appropriate. Please note that:
(a) The control systems that intervening in case of emergency (AEB, ESC, Dead man, etc.) are not included in these definitions of automated driving;
(b) The control functions that avoid dangers caused by unpredictable traffic conditions (goods/luggage dropping, frozen road, etc.) or other drivers’ illegal driving behaviors are not considered in this table.
2. A UN Regulation on Automated Driving would need to have new specific performance requirements and verification tests under various conditions as appropriate depending on each level.
3. In discussing system requirements, it is desirable to organize them by level as well as by roadway type and to include the range of vehicle types (1: parking area; 2: motorway; 3: urban and interurban road, and both automated vehicles (i.e. existing vehicle classes) and low-speed shuttle buses, pod cars, etc (i.e. new classes of vehicles).
4. The following table shows distinctive criteria of level of automated driving for the purpose of WP.29 activities to date, considering the results of discussions so far and the assumed use cases. This table should be reconsidered appropriately in accordance with each concept of automated driving system to be placed on the market in the future.
2
EC
E/T
RA
NS/W
P.29/2018/23
Object and Event Detection and Response (OEDR) by the driverThe driver may not perform secondary activities
Object and Event Detection and Response (OEDR) by the system
The driver may perform secondary activities
Monitor by Driver
Monitor by Driver (a)
Mon-itor by Driver (b)
Monitor by System (Re-turn to Driver Con-trol on Sys-tem Re-quest)
Monitor by System Full Time under defined use case
Monitor by Sys-tem only
Ref. SAE Level (J3016)
1 2 3 4 5
Ou
System takes care of longit-
The system takes care of
The system is able to
The system is able to cope with any situations in the
The sys-
EC
E/T
RA
NS/W
P.29/2018/2
4
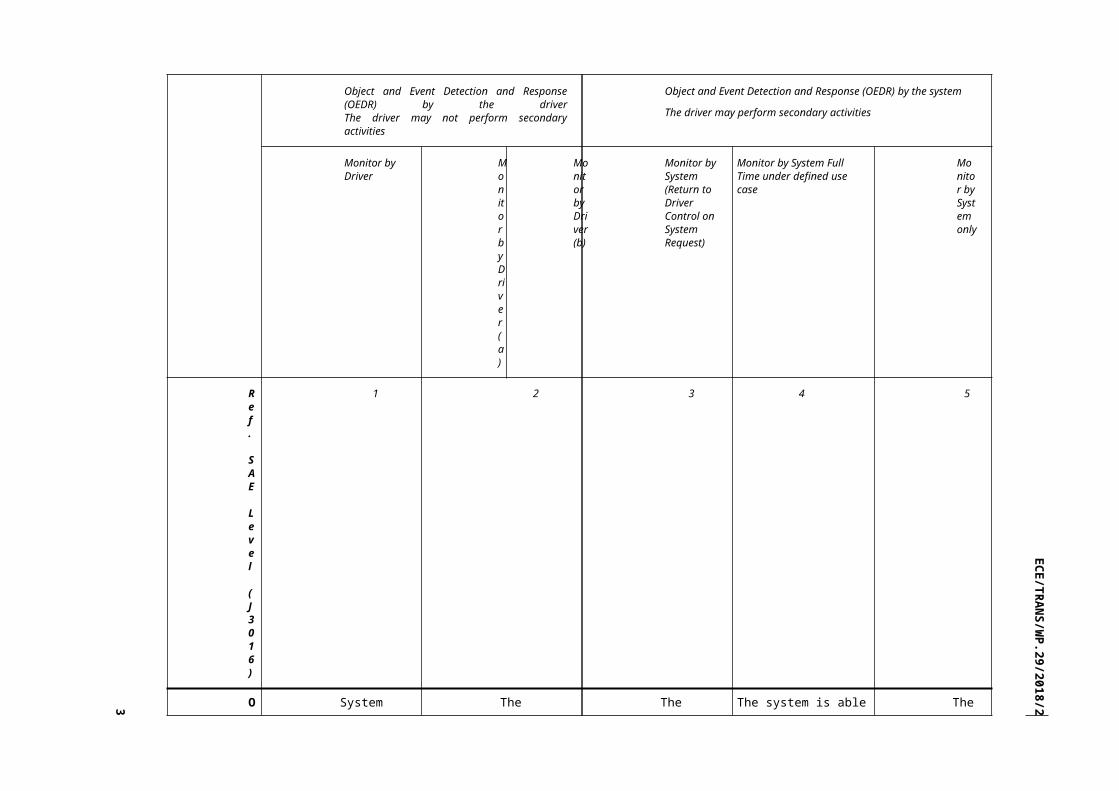
tline of Classification
udinal or lat-eral control.
Monitoring by the driver.
both longitud-inal and lateral control.
Monitoring by driver neces-sary because the system is not able to de-tect all the situations in the ODD.
The driver shall be able to intervene at any time.
cope with all dynamic driving tasks within its Operational Design Do-main (ODD)* or will other-wise trans-ition to the driver offer-ing suffi-cient lead time (driver is fallback).
The system drives and monitors (specific to the ODD) the environ-ment.
The system detects sys-tem limits and issues a transition demand if these are reached.
*The Level 3 system is e.g. not ex-pected to provide a corridor for emergency vehicle ac-cess or to follow hand
ODD (fallback included).
The driver is not necessar-ily needed during the spe-cific use-case, e. g. Valet Parking/ Campus Shuttle.
The system may however request a takeover if the ODD boundaries are reached (e.g. motorway exit).
tem is able to cope with any situ-ations on all road types, speed ranges and envir-on-mental con-di-tions.
No driver ne-ces-sary.
EC
E/T
RA
NS/W
P.29/2018/25
signals given by traffic en-forcement officers. The driver needs to remain sufficiently vigilant as to acknow-ledge and react on these situ-ations (e. g. when he hears the sirens of an emergency vehicle in close vicin-ity).
EC
E/T
RA
NS/W
P.29/2018/2
6
Vehicle Tasks
1. Execute either longit-udinal (accel-eration/braking) or lateral (steer-ing) dynamic driving tasks when activ-ated The sys-tem is not able to detect all the situations in the ODD.
1. Execute longitudinal (accelerating, braking) and lateral (steer-ing) dynamic driving tasks when activ-ated. The sys-tem is not able to detect all situations in the ODDs.
1. Execute longitudinal (accelerat-ing/braking) and lateral (steering) portions of the dynamic driving task when activ-ated. Shall monitor the driving en-vironment for opera-tional de-cisions when activ-ated.
1. Execute longitud-inal (ac-celerating/braking) and lateral (steering) portions of the dy-namic driving task when activated. Shall monitor the driving environ-ment for any de-cisions happening in the ODD (for example Emer-gency vehicles).
1. Mon-itor the driv-ing envir-on-ment.
2. System de-activated im-mediately at the request of the driver.
2. System de-activated im-mediately upon request by the human driver.
2. Permit ac-tivation only under condi-tions for which it was designed. System de-activated immediately at the re-quest of the driver. How-ever the sys-tem may
2 Permit activation only under conditions for which it was de-signed. System de-activated immedi-ately at the request of the driver. However
2. Ex-ecute lon-gitud-inal (ac-celer-ating/ brak-ing) and lat-eral
EC
E/T
RA
NS/W
P.29/2018/27
momentarily delay deac-tivation when imme-diate human takeover could com-promise safety.
the system may mo-mentarily delay de-activation when im-mediate human takeover could comprom-ise safety.
(steering).
3. No trans-ition demand as such, only warnings.
3. System automatic-ally deactiv-ated only after re-questing the driver to take-over with a suffi-cient lead time; may − under cer-tain, limited circum-stances − transition (at least initi-ate) to min-imal risk condition if the human driver does not take over. It would be beneficial if the vehicle displays used for the secondary activities
3. Shall deactivate automatic-ally if design/boundary conditions are no longer met and must be able to transfer the vehicle to a min-imal risk condition. May also ask for a transition demand before de-activating.
3. Ex-ecute the OEDR sub-tasks of the dy-namic driv-ing task- hu-man con-trols are not re-quired in an ex-treme scen-ario.
EC
E/T
RA
NS/W
P.29/2018/2
8
were also used to im-prove the human takeover process.
4. A driver en-gagement de-tection func-tion (could be realized, for example, as hands-on de-tection or monitoring cameras to de-tect the driver’s head position and eyelid move-ment etc.) could evaluate the driver’s in-volvement in the monitoring task and abil-ity to inter-vene immedi-ately.
4. Driver availability recognition shall be used to ensure the driver is in the position to take over when re-quested by the system. Potential technical solutions range from detecting the driver’s manual op-erations to monitoring cameras to detect the driver’s head posi-tion and eyelid movement.
4. Driver availabil-ity recog-nition shall be used to en-sure the driver is in the posi-tion to take over when re-quested by transition demand. This can however be lighter solutions than for level 3 be-cause the system is able to transfer the vehicle to a min-imal risk condition in the ODD.
4. Sys-tem will trans-fer the vehicle to a min-imal risk con-di-tion.
5. Emer-gency brak-ing meas-ures must be accom-plished by the system
5. Emer-gency braking measures must be accom-plished by
EC
E/T
RA
NS/W
P.29/2018/29
and not ex-pected from the driver (due to sec-ondary activities).
the system and not expected from the driver (due to secondary activities).
Driver Tasks
1. Determine when activa-tion or deac-tivation of as-sistance sys-tem is appro-priate.
1. Determine when activa-tion or deac-tivation of the system is ap-propriate.
1. Determ-ine when ac-tivation or deactivation of the auto-mated driv-ing system is appropri-ate.
1. Determ-ine when activation/deactiva-tion of the automated driving system is appropri-ate.
1. Ac-tivate and deac-tivate the auto-mated driv-ing sys-tem.
2. Monitor the driving envir-onment. Ex-ecute either longitudinal (acceleration/braking) or lateral (steer-ing) dynamic driving task.
2. Execute the OEDR by monitoring the driving envir-onment and responding if necessary (e.g. emergency vehicles com-ing).
2. Does not need to ex-ecute the longitudinal, lateral driv-ing tasks and monit-oring of the environment for opera-tional de-cisions in the ODD.
2. Does not need to execute the longit-udinal, lat-eral driv-ing tasks and monit-oring of the envir-onment in the ODD.
2. Does not need to ex-ecute the lon-gitud-inal, lat-eral driv-ing tasks and mon-itor-ing of
EC
E/T
RA
NS/W
P.29/2018/2
10
the envir-on-ment dur-ing the whole trip.
3. Supervise the dynamic driving task executed by driver assist-ance system and interven-ing immedi-ately when re-quired by the environment and the system (warnings).
3. Constantly supervise the dynamic driv-ing task ex-ecuted by the system. Al-though the driver may be disengaged from the phys-ical aspects of driving, he/she must be fully engaged men-tally with the driving task and shall im-mediately in-tervene when required by the environ-ment or by the system (no transition de-mand by the system, just warning in case of misuse or failure).
3. Shall re-main suffi-ciently vigil-ant as to ac-knowledge the trans-ition de-mand and, acknow-ledge vehicle warnings, mechanical failure or emergency vehicles (in-crease lead time com-pared to level 2).
3. May be asked to take over upon re-quest within lead time. However the system does not require the driver to provide fallback perform-ance under the ODD.
3. De-term-ine way-po-ints and des-tina-tions .
4. The driver 4. The driver 4. May turn 4. May 4.
EC
E/T
RA
NS/W
P.29/2018/211
shall not per-form second-ary activities which will hamper him in intervening immediately when re-quired.
shall not per-form second-ary activities which will hamper him in intervening immediately when re-quired.
his attention away from the complete dynamic driving task in the ODD but can only perform sec-ondary activities with appro-priate reac-tion times. It would be beneficial if the vehicle displays were used for the sec-ondary activities.
perform a wide vari-ety of sec-ondary activities in the ODD.
May per-form a wide vari-ety of sec-ond-ary activ-ities dur-ing the whole trip.
Considera-tion points on development of vehicle regulation
1. Consider whether regu-latory provi-sion for lon-gitudinal (ac-celerating, braking) and lateral control (steering) are necessary.
1. Consider which regu-latory provi-sion for lon-gitudinal (accelerat-ing, braking) and lateral control (steering) are neces-sary includ-ing the mon-itoring of the driving environ-ment.
1. Con-sider which reg-ulatory provision for longit-udinal (ac-celerating, braking) and lateral control (steering) are neces-sary in-cluding the monit-oring of the driving environ-ment for
Note: Pre-lim-inary ana-lysis only- sub-ject fur-ther re-view.
1. Con-sider which reg-ulat-ory
EC
E/T
RA
NS/W
P.29/2018/2
12
any de-cisions happening in the use case (for example Emer-gency vehicles).
pro-vi-sion for lon-gitud-inal (ac-celer-ating, brak-ing) and lat-eral con-trol (steering) are ne-ces-sary in-clud-ing the mon-itor-ing of the driv-ing envir-on-ment for any de-cisions (for ex-ampl
EC
E/T
RA
NS/W
P.29/2018/213
e Emergency vehicles).
2. Consider regulatory provision to ensure the sys-tem is deactiv-ated immedi-ately upon re-quest by the human driver.
2. Consider regulatory provision to ensure the system:
i) Permits activation only under conditions for which it was de-signed, and
ii) Deactiv-ates imme-diately upon request by the driver. However the system may momentarily delay deac-tivation when imme-diate driver takeover could com-promise safety.
2. Con-sider regu-latory pro-vision to ensure the system:
i) Permits activation only under conditions for which it was de-signed, and
ii) Deac-tivates im-mediately upon re-quest by the driver. However the system may mo-mentarily delay de-activation when im-mediate driver takeover could comprom-ise safety.
2. De-pend-ing upon the vehicle con-figur-ation, con-sider regu-latory pro-vi-sion to en-sure the sys-tem:
i) Per-mits activ-ation only under con-di-tions for which it
EC
E/T
RA
NS/W
P.29/2018/2
14
was de-signed, and
ii) Deac-tiv-ates im-medi-ately upon re-quest by the driver. How-ever the sys-tem may mo-ment-arily delay deac-tiva-tion when im-medi-ate driver takeover could com-promi
EC
E/T
RA
NS/W
P.29/2018/215
se safety.
3. Consider the warning strategy to be used. This might include warning/in-forming the driver in due time when an intervention by the driver is needed.
3. Consider regulatory provision to ensure the system auto-matically deactivates only after requesting the driver to take-over with a suffi-cient lead time; includ-ing − under certain, lim-ited circum-stances − transition (at least initi-ate) to min-imal risk condition if the driver does not take over. It would be beneficial if the vehicle displays used for the secondary activities were also used to im-prove the human takeover
3. Con-sider regu-latory pro-vision to ensure the system automatic-ally trans-fer the vehicle to a minimal risk condi-tion preferably outside of an active lane of traffic if design/boundary conditions are no longer met.
3. Con-sider regu-latory pro-vi-sion to en-sure the sys-tem auto-mat-ically trans-fer the vehicle to a min-imal risk con-dition preferably out-side of an active lane of traffic.
EC
E/T
RA
NS/W
P.29/2018/2
16
process.
4. Consider the driver availability re-cognition function to evaluate the driver’s in-volvement in the monitoring task and abil-ity to inter-vene immedi-ately. For ex-ample, as hands-on de-tection or monitoring cameras to de-tect the driver’s head position and eyelid move-ment etc.
4. Consider regulatory provision for driver availability recognition is used to ensure the driver is in the position to take over when re-quested by the system.
4. Con-sider regu-latory pro-vision for driver availabil-ity recog-nition is used to en-sure the driver is in the posi-tion to take over when re-quested by the system transition demand at the end of the ODD.
5. Consider regulatory provision for emer-gency brak-ing meas-ures by the system.
5. Con-sider regu-latory pro-vision for emergency braking measures by the sys-tem.
4. Con-sider regu-latory pro-vi-sion for emer-gency brak-ing meas-ures by
EC
E/T
RA
NS/W
P.29/2018/217
the sys-tem.
Examples of the necessary system performance requirements
Override (e.g. steering, braking, ac
Necessary in general Unneces-sary when driverless mode. Other-wise ne-cessary in general. However the sys-tem may moment-arily delay de-activation when im-mediate human takeover could com-promise safety.
Unnecessary
EC
E/T
RA
NS/W
P.29/2018/2
18
celerating) function by the driver
Aspects o
De-tec-tion of hands- off when
Detection o
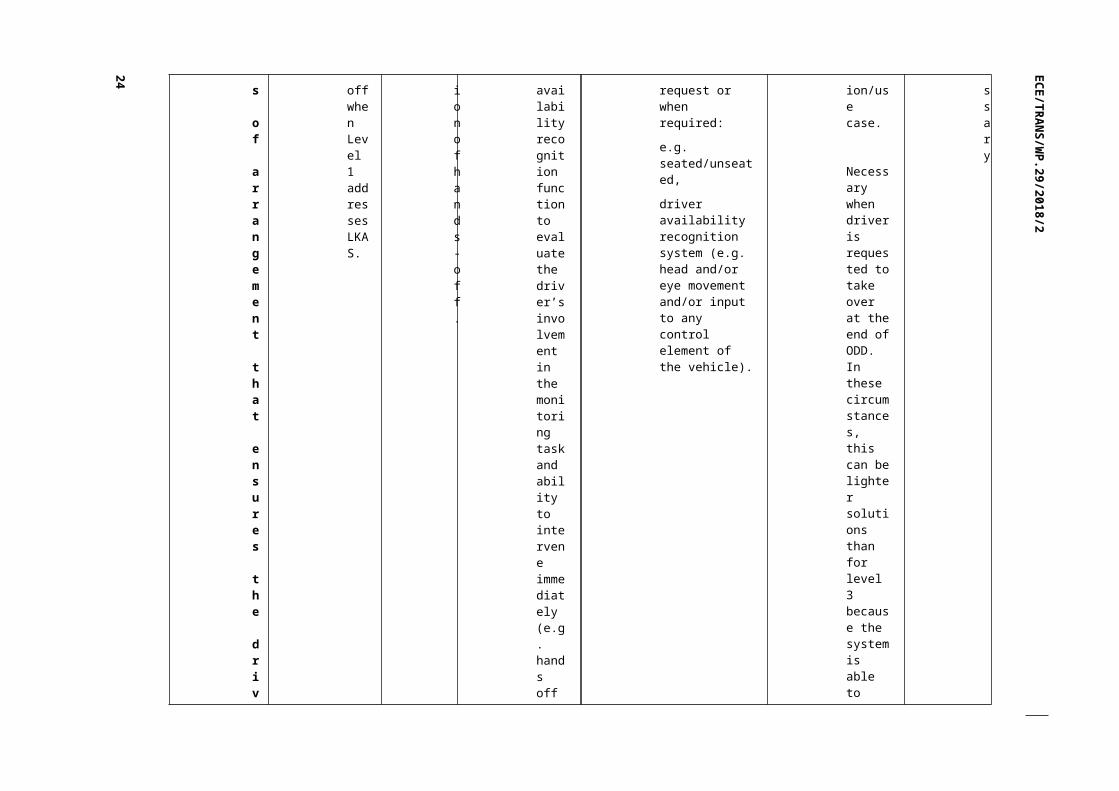
De-tecting the driver avail-ability recog-nition func-
Detection of driver’s availability to take over the driving task upon request or when re-quired:
e.g. seated/un-seated,
Unneces-sary when driverless operation/use case.
Neces-
Unnecessa
EC
E/T
RA
NS/W
P.29/2018/219
f arrangement that ensures the driver’s invo
Level 1 ad-dresses LKAS.
f hands-off.
tion to evalu-ate the driver’s in-volve-ment in the monit-oring task and ability to in-ter-vene imme-diately (e.g. hands off de-tec-tion, head and/or eye move-ment and/or input to any control ele-ment of the vehicle).
driver availability recognition system (e.g. head and/or eye movement and/or input to any control element of the vehicle).
sary when driver is requested to take over at the end of ODD. In these cir-cum-stances, this can be lighter solutions than for level 3 because the sys-tem is able to transfer the vehicle to a minimal risk con-dition in the ODD.
ry
EC
E/T
RA
NS/W
P.29/2018/2
20
lvement in dynamic driving tasks (driver mon
EC
E/T
RA
NS/W
P.29/2018/221
itoring, etc.)
Aspects of arrangement that e
Not applicable Consideration of the methods used to reengage the driver following system request (including minimal risk man-euver and cognitive stimulation- if ap-plicable the vehicle infotainment system showing non-driv-ing relevant content to be deactivated automatically when transition demand is issued).
Unneces-sary when driverless operation/use case but level 3 require-ment when the end of the ODD is reached.
Unnecessary
EC
E/T
RA
NS/W
P.29/2018/2
22
nsures the driver’s resumption of dynamic dr
EC
E/T
RA
NS/W
P.29/2018/223
iving tasks (transition periods to the drive
EC
E/T
RA
NS/W
P.29/2018/2
24
r, etc.)
Aspect of transition demand procedur
EC
E/T
RA
NS/W
P.29/2018/225
e.
System reliability
Consideration shall be given to evaluation of the system reliability and redundancy as necessary.
Comprehensive recogn
The area to be monitored (de-pends on the sys-tem function).
The area to be monitored n
The area to be mon-itored neces-sary for lat-eral and longit-udinal control (de-pends on the system func-tion, while
The area to be monitored depends on the system function (Lateral and longitudinal directions).
It is the task of the system to perform OEDR.
EC
E/T
RA
NS/W
P.29/2018/2
26
ition of surrounding environment
(sensing,
ecessary for lat-eral and longitudinal control (depe
recog-nizing it is the task of the driver to per-form OEDR).
Addi-tion-ally the system may per-form OEDR func-tion.
EC
E/T
RA
NS/W
P.29/2018/227
etc.)
nds on the system function, while recognizing it is the t
EC
E/T
RA
NS/W
P.29/2018/2
28
ask of the driver to per-form OEDR).
Recording of
Un-ne-ces-sary
Unnecessary
The driver’s oper-ations and the system status (incl. system beha-vior).
The driver’s opera-tions and the system status (incl. system behavior).
The system status (incl. system behavior)).
EC
E/T
RA
NS/W
P.29/2018/229
system status (inc. system behavior)
(DSSA-
EC
E/T
RA
NS/W
P.29/2018/2
30
Data Storage System for ACSF, EDR, etc.)
EC
E/T
RA
NS/W
P.29/2018/231
Cyber-Security
Necessary if the information communication in connected vehicles, etc. affects the vehicle control
Compatibility with traffic
Yes Yes
Yes Functionalities that include a human driver, are in general allowed by the road traffic conventions, but the im-plementation in local traffic rules is not harmonized. Driver might not be able, for example, to perform other activities than driving, thus national traffic laws might need amend-ments. Following principles have been agreed upon in the WP.1 re-garding side activities:
Principle 1: these activities do not prevent the driver from responding to demands from the vehicle sys-tems for taking over the driving task, and
Principle 2: these activities are con-sistent with the prescribed use of the vehicle systems and their defined functions.
Further consideration ne-cessary to reflect driver-less systems before a con-clusion can be made.
Further con-sideration ne-cessary to re-flect driverless systems before a conclusion can be made.

EC
E/T
RA
NS/W
P.29/2018/2
32
law (WP.1)
EC
E/T
RA
NS/W
P.29/2018/233
Summary of the current conditions and the issues to be discussed (specific use cases)
Parking area
Already put into practice:
Parking Assist
LKA (draft stan-dards)
ACC (no specific performance re-quirements)
ACSF Cat.B1 (Steering Function hands-on)
Automated parking by the driver’s remote control (monitoring) (RCP-Re-mote Control Parking, CAT. A under ACSF amendment of R79)
Requirements need to be developed
Roads exclus-ively for motor ve
Categories B2*, C, D and E* under ACSF (amendment of R79) Category B1 in combination with longitudinal control
Categories B2, B2+E under ACSF (amendment of R79)
Requirements need to be developed
ACC+ACSF (Cat.B1,
ACSF Cat. B2*
ACSF Cat.E*
(Continuous Lane Guidance hands-off)
* The functions of Category B2 and Category E of ACSF are allowed in the range of level 3, but if national traffic law prohibits secondary activities, these functions will be used as level 2. In the case of level 2, appropriate driver activity recognition means shall be required for Categories B2 and E of ACSF to ensure constant continuous monitoring by the driver.
EC
E/T
RA
NS/W
P.29/2018/2
34
hicles with phys-ical sep-ar-a-tion from oncom-ing traffic (e.g. mo-torway)
Cat.C [Basic Lane Change Assist], Cat.D [Sm
EC
E/T
RA
NS/W
P.29/2018/235
art LCA])
Urban and interurban roads
Category B1 in combination with longitudinal Control
To be discussed by R79 IWG ACSF: Cat. B1 in combination with C, D
Requirements need to be developed